Linu驱动之ic用户态调用修订版
linux 驱动 内核态与用户态的方法

linux驱动内核态与用户态的方法一、引言Linux操作系统以其高效、稳定和开源的特点,广泛应用于各种硬件设备。
驱动程序作为操作系统与硬件设备之间的桥梁,对于系统稳定性和性能至关重要。
在驱动程序的开发过程中,了解内核态与用户态的方法是至关重要的。
本文将详细介绍这两种状态下进行驱动程序开发的方法。
二、内核态开发1.权限与状态:在Linux中,内核态是操作系统内核空间,需要以root权限运行。
驱动程序在内核态下运行,可以对硬件设备进行直接操作。
2.内存管理:在内核态下,驱动程序可以直接访问物理内存,因此需要熟练掌握内存管理技巧,包括内存分配、释放、共享和保护等。
3.设备驱动模型:Linux提供了设备驱动模型,通过它可以方便地编写与硬件设备交互的代码。
了解设备驱动模型的结构和机制,是内核态驱动程序开发的基础。
4.中断与轮询:中断和轮询是驱动程序与硬件设备交互的主要方式。
了解这两种机制的工作原理,能够更好地编写驱动程序。
5.模块加载与卸载:内核态下的驱动程序通常以模块形式加载,了解模块加载与卸载的机制,能够更方便地编写和管理驱动程序。
三、用户态开发1.权限与状态:在Linux中,用户态是用户空间,需要以普通用户身份运行。
驱动程序在用户态下运行,只能通过系统调用与内核态交互。
2.系统调用:系统调用是用户程序与内核态交互的主要方式。
了解系统调用的机制和接口,能够更好地编写用户态驱动程序。
3.内存管理:用户态下的驱动程序需要通过系统调用访问物理内存,因此需要熟练掌握内存管理的技巧,包括内存分配、释放、共享和保护等。
4.设备驱动模型:虽然用户态下的驱动程序无法直接访问硬件设备,但通过设备驱动模型,可以间接地控制硬件设备。
了解设备驱动模型的结构和机制,对于用户态驱动程序的开发也很有帮助。
四、注意事项1.安全问题:在内核态下开发驱动程序时,需要注意避免安全漏洞,如缓冲区溢出、权限提升等。
2.稳定性问题:驱动程序的稳定性直接影响到整个系统的稳定性。
i.MX8 8X Linux BSP L5.4 Rev. 1 应用笔记说明书

AN13275如何在新的 iMX8/8X 板上启用 Linux BSP L5.4Rev. 1 — 2023年5月26日应用笔记如何在新的 iMX8/8X 板上启用 Linux BSP L5.4 1 介绍1.1 目标本应用笔记介绍了在新的自定义 i.MX 8/8X 板上启用标准 Linux BSP L5.4 的一般过程,帮助用户快速移植标准Linux BSP 版本代码到自定义 i.MX 8/8X 板上,并提示用户注意那些需要修改的关键部分。
1.2 示例板本应用笔记使用 i.MX 8QXP 汽车参考板作为示例板,因为标准的 Linux BSP 版本不支持该参考板。
更多详细信息,请联系恩智浦代表。
该板的硬件设计基于 i.MX8QXP MEK 板,但有如下变化:•i.MX 8QXP C0 芯片•三星汽车级 LPDDR4 和 eMMC5.1•MIPI-CSI,配备 NVP6324 汽车 AHD 解决方案•LVDS 显示器,配备 TI DS90UB947/948 Serdes(通过FPD Link III),用于汽车应用•MIPI-DSI 显示器,配备 Maxim 96752/96755 Serdes(通过 GMSL2),用于汽车应用•恩智浦 TJA1101 汽车 100 Mbps 以太网 PHY•用于 Carplay/AA 的 USB3.0 host 和用于调试的 USB2.0 OTG图 1. i.MX 8QXP 汽车参考板1.3 Linux BSP 版本本应用笔记以 L5.4.47_2.2.0 Linux BSP 版本为例。
如需查询所有 i.MX Linux BSP 的版本,请参见 Embedded Linux for i.MX Applications Processors。
如何在新的 iMX8/8X 板上启用 Linux BSP L5.4以下章节介绍了移植SCFW、ATF、U-Boot 和 Linux 内核的一般过程。
Linux内核中系统调用详解
Linux内核中系统调用详解什么是系统调用?(Linux)内核中设置了一组用于实现各种系统功能的子程序,称为系统调用。
用户可以通过系统调用命令在自己的应用程序中调用它们。
从某种角度来看,系统调用和普通的函数调用非常相似。
区别仅仅在于,系统调用由(操作系统)核心提供,运行于核心态;而普通的函数调用由函数库或用户自己提供,运行于用户态。
随Linux核心还提供了一些(C语言)函数库,这些库对系统调用进行了一些包装和扩展,因为这些库函数与系统调用的关系非常紧密,所以习惯上把这些函数也称为系统调用。
为什么要用系统调用?实际上,很多已经被我们习以为常的C语言标准函数,在Linux 平台上的实现都是靠系统调用完成的,所以如果想对系统底层的原理作深入的了解,掌握各种系统调用是初步的要求。
进一步,若想成为一名Linux下(编程)高手,也就是我们常说的Hacker,其标志之一也是能对各种系统调用有透彻的了解。
即使除去上面的原因,在平常的编程中你也会发现,在很多情况下,系统调用是实现你的想法的简洁有效的途径,所以有可能的话应该尽量多掌握一些系统调用,这会对你的程序设计过程带来意想不到的帮助。
系统调用是怎么工作的?一般的,进程是不能访问内核的。
它不能访问内核所占内存空间也不能调用内核函数。
(CPU)(硬件)决定了这些(这就是为什么它被称作"保护模式")。
系统调用是这些规则的一个例外。
其原理是进程先用适当的值填充(寄存器),然后调用一个特殊的指令,这个指令会跳到一个事先定义的内核中的一个位置(当然,这个位置是用户进程可读但是不可写的)。
在(Intel)CPU中,这个由中断0x80实现。
硬件知道一旦你跳到这个位置,你就不是在限制模式下运行的用户,而是作为操作系统的内核--所以你就可以为所欲为。
进程可以跳转到的内核位置叫做sysem_call。
这个过程检查系统调用号,这个号码告诉内核进程请求哪种服务。
然后,它查看系统调用表(sys_call_table)找到所调用的内核函数入口地址。
linux ops调用流程
linux ops调用流程
Linuxops调用流程是Linux内核中常见的一种操作方式,它是
由一组特定的函数组成的。
这些函数可以被设备驱动程序使用,以便在用户空间和内核空间之间进行数据传输。
整个调用流程可以分为以下几个步骤:
1. 调用open函数:当用户程序打开设备文件时,系统会调用设备驱动程序中的open函数。
这个函数会初始化设备并返回文件描述符。
2. 调用read函数:当用户程序从设备文件中读取数据时,系统会调用设备驱动程序中的read函数。
这个函数会将设备中的数据读
取到内核空间中,并将其返回到用户空间。
3. 调用write函数:当用户程序向设备文件中写入数据时,系
统会调用设备驱动程序中的write函数。
这个函数会将用户空间中的数据传输到内核空间中,并最终将其写入设备。
4. 调用ioctl函数:当需要进行设备的控制操作时,系统会调
用设备驱动程序中的ioctl函数。
这个函数可以进行一些特殊的控制操作,例如设置设备的参数等。
5. 调用close函数:当用户程序关闭设备文件时,系统会调用
设备驱动程序中的close函数。
这个函数会释放设备资源并关闭设备。
总的来说,Linux ops调用流程是一个在内核空间和用户空间之间进行数据传输的重要过程。
通过了解调用流程,我们可以更好地理解Linux内核的运作机制,并且可以更加高效地编写设备驱动程序。
linux中nice的用法

linux中nice的用法Linux中的nice指令是一个非常有用的工具,能够帮助我们优化系统性能,并合理地分配系统资源。
在本文中,我们将逐步回答有关Linux中nice 指令的各种问题,包括其作用、用法、参数、实例等。
一、什么是nice指令?nice指令在Linux中以一个命令行工具的形式存在,它用于调整进程的优先级。
所谓进程的优先级,指的是进程在系统中获取CPU时间的次序。
nice指令通过改变进程的优先级,从而改变进程在CPU竞争中的地位,进而影响进程的执行速度和相应能力。
二、nice指令的作用是什么?nice指令的主要作用是调整进程的优先级,使其能够在系统资源有限的情况下更好地运行。
例如,当系统同时运行多个进程时,CPU的时间会被这些进程竞争,从而导致某些进程执行速度较慢。
通过调整进程的优先级,我们可以让某些重要的进程在竞争中优先获取CPU时间,提高其执行效率,从而达到优化系统性能的目的。
三、nice指令的用法有哪些?1. 基本用法:nice命令的基本用法非常简单,只需在命令前加上nice即可。
例如,要运行一个命令并将其优先级设为10,可以使用以下语法:nice -n 10 command其中,-n参数用于指定进程的优先级,取值范围为-20到19,数值越小优先级越高。
2. 使用renice命令改变运行中进程的优先级:除了在启动进程时使用nice指令调整优先级外,我们还可以使用renice命令在进程运行过程中对其进行优先级调整。
renice命令的基本语法如下:renice -n priority -p PID其中,-n参数用于指定进程的新优先级,-p参数用于指定需要调整优先级的进程PID。
四、指定nice值的范围是多少?nice值的范围在-20到19之间,其中-20表示最高优先级,19表示最低优先级。
需要注意的是,普通用户只能将进程优先级调整到0到19之间,而管理员可以通过sudo命令将其调整到-20到19之间。
LinuxI2C驱动--用户态驱动简单示例

LinuxI2C驱动--⽤户态驱动简单⽰例1. Linux内核⽀持I2C通⽤设备驱动(⽤户态驱动:由应⽤层实现对硬件的控制可以称之为⽤户态驱动),实现⽂件位于drivers/i2c/i2c-dev.c,设备⽂件为/dev/i2c-02. I2C通⽤设备驱动以字符设备注册进内核的static const struct file_operations i2cdev_fops = {.owner = THIS_MODULE,.llseek = no_llseek,.read = i2cdev_read,.write = i2cdev_write,.unlocked_ioctl = i2cdev_ioctl,.open = i2cdev_open,.release = i2cdev_release,};res = register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops);3. 对设备⽂件进⾏读写时,可以调⽤read、write或者ioctl等⽅法,他们都是通过调⽤函数i2c_transfer来实现对I2C设备的操作的int i2c_transfer(struct i2c_adapter * adap, struct i2c_msg *msgs, int num){int ret;/* REVISIT the fault reporting model here is weak:** - When we get an error after receiving N bytes from a slave,* there is no way to report "N".** - When we get a NAK after transmitting N bytes to a slave,* there is no way to report "N" ... or to let the master* continue executing the rest of this combined message, if* that's the appropriate response.** - When for example "num" is two and we successfully complete* the first message but get an error part way through the* second, it's unclear whether that should be reported as* one (discarding status on the second message) or errno* (discarding status on the first one).*/if (adap->algo->master_xfer) {#ifdef DEBUGfor (ret = 0; ret < num; ret++) {dev_dbg(&adap->dev, "master_xfer[%d] %c, addr=0x%02x, ""len=%d%s\n", ret, (msgs[ret].flags & I2C_M_RD)'R' : 'W', msgs[ret].addr, msgs[ret].len,(msgs[ret].flags & I2C_M_RECV_LEN) ? "+" : "");}#endifif (in_atomic() || irqs_disabled()) {ret = mutex_trylock(&adap->bus_lock);if (!ret)/* I2C activity is ongoing. */return -EAGAIN;} else {mutex_lock_nested(&adap->bus_lock, adap->level);}ret = adap->algo->master_xfer(adap,msgs,num);mutex_unlock(&adap->bus_lock);return ret;} else {dev_dbg(&adap->dev, "I2C level transfers not supported\n");return -EOPNOTSUPP;}}4. i2c_transfer通过代码可以看出,i2c_transfer 通过调⽤相应的 adapter 的 master_xfer ⽅法实现的,⽽ master_xfer 主要是根据 struct i2c_msg 类型的msgs来进⾏处理的。
linux中修改系统启动项的方法

linux中修改系统启动项的方法修改Linux系统启动项的方法Linux系统的启动项是决定系统启动时执行哪些程序和服务的配置项,可以根据实际需求来进行修改和调整。
本文将介绍几种常见的修改Linux系统启动项的方法。
一、使用Systemd来管理启动项Systemd是目前大部分Linux发行版所采用的系统初始化和服务管理工具。
通过修改Systemd的配置文件可以实现对启动项的管理。
1. 打开终端,使用root权限登录系统。
2. 进入Systemd的配置目录,一般路径为/etc/systemd/system。
3. 在该目录下,可以看到一些以.service为后缀的文件,这些文件就是与启动项相关的配置文件。
4. 找到对应的启动项配置文件,使用文本编辑器打开进行修改。
可以根据需要添加、删除或修改相关的配置项。
5. 修改完成后,保存文件并退出文本编辑器。
6. 使用命令systemctl daemon-reload重新加载Systemd的配置文件。
7. 使用命令systemctl enable <启动项名称>.service使修改后的启动项生效。
二、使用SysVinit来管理启动项SysVinit是较早期的一种系统初始化和服务管理工具,在一些Linux发行版中仍然被使用。
通过修改SysVinit的配置文件可以实现对启动项的管理。
1. 打开终端,使用root权限登录系统。
2. 进入SysVinit的配置目录,一般路径为/etc/init.d。
3. 在该目录下,可以看到一些以启动项名称命名的脚本文件,这些文件就是与启动项相关的配置文件。
4. 找到对应的启动项配置文件,使用文本编辑器打开进行修改。
可以根据需要添加、删除或修改相关的配置项。
5. 修改完成后,保存文件并退出文本编辑器。
6. 使用命令chkconfig <启动项名称> on使修改后的启动项生效。
三、使用GRUB来管理启动项GRUB是Linux系统中常用的引导加载程序,通过修改GRUB的配置文件可以实现对启动项的管理。
linux字符驱动框架(用户态的read,write,poll是怎么操作驱动的)
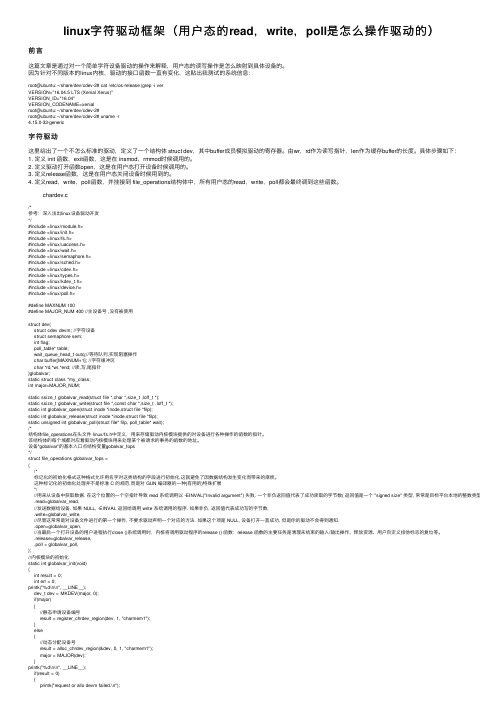
linux字符驱动框架(⽤户态的read,write,poll是怎么操作驱动的)前⾔这篇⽂章是通过对⼀个简单字符设备驱动的操作来解释,⽤户态的读写操作是怎么映射到具体设备的。
因为针对不同版本的linux内核,驱动的接⼝函数⼀直有变化,这贴出我测试的系统信息:root@ubuntu:~/share/dev/cdev-2# cat /etc/os-release |grep -i verVERSION="16.04.5 LTS (Xenial Xerus)"VERSION_ID="16.04"VERSION_CODENAME=xenialroot@ubuntu:~/share/dev/cdev-2#root@ubuntu:~/share/dev/cdev-2# uname -r4.15.0-33-generic字符驱动这⾥给出了⼀个不怎么标准的驱动,定义了⼀个结构体 struct dev,其中buffer成员模拟驱动的寄存器。
由wr,rd作为读写指针,len作为缓存buffer的长度。
具体步骤如下:1. 定义 init 函数,exit函数,这是在 insmod,rmmod时候调⽤的。
2. 定义驱动打开函数open,这是在⽤户态打开设备时候调⽤的。
3. 定义release函数,这是在⽤户态关闭设备时候⽤到的。
4. 定义read,write,poll函数,并挂接到 file_operations结构体中,所有⽤户态的read,write,poll都会最终调到这些函数。
chardev.c/*参考:深⼊浅出linux设备驱动开发*/#include <linux/module.h>#include <linux/init.h>#include <linux/fs.h>#include <linux/uaccess.h>#include <linux/wait.h>#include <linux/semaphore.h>#include <linux/sched.h>#include <linux/cdev.h>#include <linux/types.h>#include <linux/kdev_t.h>#include <linux/device.h>#include <linux/poll.h>#define MAXNUM 100#define MAJOR_NUM 400 //主设备号 ,没有被使⽤struct dev{struct cdev devm; //字符设备struct semaphore sem;int flag;poll_table* table;wait_queue_head_t outq;//等待队列,实现阻塞操作char buffer[MAXNUM+1]; //字符缓冲区char *rd,*wr,*end; //读,写,尾指针}globalvar;static struct class *my_class;int major=MAJOR_NUM;static ssize_t globalvar_read(struct file *,char *,size_t ,loff_t *);static ssize_t globalvar_write(struct file *,const char *,size_t ,loff_t *);static int globalvar_open(struct inode *inode,struct file *filp);static int globalvar_release(struct inode *inode,struct file *filp);static unsigned int globalvar_poll(struct file* filp, poll_table* wait);/*结构体file_operations在头⽂件 linux/fs.h中定义,⽤来存储驱动内核模块提供的对设备进⾏各种操作的函数的指针。
Linux操作系统修改内核参数的三种方法详细说明
Linux操作系统修改内核参数的三种方法详细说明linux内核的参数设置怎么弄呢,Linux 操作系统修改内核参数有以下三种方式:修改 /etc/sysctl.conf 文件;在文件中加入配置项,格式为 key = value,保存修改后的文件,执行命令 sysctl -p 加载新配置。
使用 sysctl 命令临时修改;如:sysctl -w net.ipv4.tcp_mem = “379008 505344 758016”直接修改/proc/sys/ 目录中的文件。
如:echo “379008 505344 758016” 》 /proc/sys/net/ipv4/tcp_mem 注意:第一种方式在重启操作系统后自动永久生效;第二种和第三种方式在重启后失效。
内核参数kernel.core_uses_pi d = 1core_uses_pid 可以控制 core 文件的文件名中是否添加 pid 作为扩展名。
设置为1,表示添加 pid 作为扩展名,生成的 core 文件格式为core.xxx;设置为0(默认),表示生成的 core 文件统一命名为 core。
kernel.core_pat te rn = corecore_pattern 可以控制 core 文件的保存位置和文件格式。
如:kernel.core_pattern = “/corefile/core-%e-%p-%t”,表示将core 文件统一生成到 /corefile 目录下,产生的文件名为 core-命令名-pid-时间戳。
以下是参数列表:%p - insert pid into filename 添加 pid%u - insert current uid into filename 添加当前 uid%g - insert current gid into filename 添加当前 gid%s - insert signal that caused the coredump into the filename 添加导致产生 core 的信号%t - insert UNIX ti me that the coredump occurred into filename 添加 core 文件生成时的 unix 时间%h - insert hostname where the coredump happened into filename 添加主机名%e - insert coredumping executable name into filename 添加命令名kernel.msgmax = 8192进程间的消息传递是在内核的内存中进行的。
linux nice用法
linux nice用法
nice是一个用于修改进程优先级的命令,在Linux系统中非常常用。
它允许用户使进程以较低的优先级或者更高的优先级运行。
准确回答:可以使用nice命令降低或提高进程的优先级。
以下是nice命令的使用方法:
1.降低进程优先级:使用“nice -n”命令,其中-n后跟要降低的优先级值,值范围为-20到19(-20表示最高优先级,19表示最低优先级)。
例如,“nice -n 10 command”会将command进程的优先级降低为10。
2.提高进程优先级:使用“nice --”命令,后面跟要提高的优先级值。
例如,“nice --10 command”会将command进程的优先级提高为10。
3.显示进程优先级:使用“nice -n”命令,后面不跟任何参数。
例如,“nice -n”会显示当前进程的优先级。
拓展:nice命令有时用于调节系统资源的使用。
较低的优先级值会使应用程序使用更少的CPU资源,从而在运行时对系统影响较小。
较高的优先级值可以确保应用程序优先处理,但可能导致其他进程性能下降。
此外,还有一个相关的命令renice可以用于修改已经在运行的进程的优先级。
renice命令的语法为“renice -n新的优先级-p进程ID”,其中新的优先级可以是一个值,也可以使用“-”或“+”符号来调整进程的当前优先级。
总之,nice命令和renice命令在Linux系统中非常有用,可以帮助用户管理进程的优先级和系统资源的分配。
Linux系统用户态和内核态

Linux 系统⽤户态和内核态Unix/Linux 的体系架构如上图所⽰,从宏观上来看,Linux 操作系统的体系架构分为⽤户态和内核态(或者⽤户空间和内核空间)。
内核从本质上看是⼀种软件-----控制计算机的硬件资源,并提供上层应⽤程序运⾏的环境。
⽤户态即上层应⽤程序的活动空间,应⽤程序的执⾏必须依托于内核提供的资源,包括CPU 资源、存储资源、I/O 资源等。
为了使上层应⽤能够访问到这些资源,内核必须为上层应⽤提供访问的接⼝:。
简单来说::运⾏在内核空间的进程的状态:运⾏在⽤户空间的进程的状态系统调⽤是操作系统的最⼩功能单位,这些系统调⽤根据不同的应⽤场景可以进⾏扩展和裁剪,现在各种版本的Unix 实现都提供了不同数量的系统调⽤,如Linux 的不同版本提供了240-260个系统调⽤,FreeBSD ⼤约提供了320个。
我们可以把系统调⽤看成是⼀种不能再化简的操作(类似于原⼦操作,但是不同概念),有⼈把它⽐作⼀个汉字的⼀个“笔画”,⽽⼀个“汉字”就代表⼀个上层应⽤,我觉得这个⽐喻⾮常贴切。
⼀个汉字有很多笔画组成,因此有时候如果要实现⼀个完整的汉字就必须调⽤很多的系统调⽤。
这有时是⼀件很崩溃的事情,⽐如说这个字,你可能认识,但是有⼏个⼈会写呢?:系统调⽤的封装应⽤程序直接使⽤系统调⽤,这势必会加重程序员的负担,良好的程序设计⽅法是:重视上层的业务逻辑操作,⽽尽可能避免底层复杂的实现细节。
那么有没有优化空间呢?库函数正是为了将程序员从复杂的细节中解脱出来⽽提出的⼀种有效⽅法。
它实现对系统调⽤的封装,将简单的业务逻辑接⼝呈现给⽤户,⽅便⽤户调⽤,从这个⾓度上看,库函数就像是组成汉字的“偏旁”。
这样的⼀种组成⽅式极⼤增强了程序设计的灵活性,对于简单的操作,我们可以直接调⽤来访问资源,如“⼈”;对于复杂操作,我们借助于来实现,如“仁”。
库函数依据不同的标准也可以有不同的实现版本,如ISOC 标准库,POSIX 标准库等。
2-Linux驱动和内核模块编程

设备驱动的Hello World模块 设备驱动的 模块
模块卸载函数
static void __exit cleanup_function(void) { /* 释放资源 */ } module_exit(cleanup_function);
在模块被移除前注销接口并 释放所有所占用的系统资源
标识这个代码是只用于模块卸载( 标识这个代码是只用于模块卸载 通过使编译器把它放在 特殊的 ELF 段) 原型: 原型:#define __exit __attribute__ ((__section__(“.exit.text”)))
查看已加载模块
lsmod cat /proc/modules.
卸载驱动模块 卸载模块
从内核中卸载模块可以用rmmod工具.
注意,如果内核认为该模块任然在使用状态, 注意,如果内核认为该模块任然在使用状态,或 者内核被禁止移除该模块,则无法移除该模块。 者内核被禁止移除该模块,则无法移除该模块。
内核打印函数
隐藏硬件细节,提高应用软件的可移植性 提供安全性 开发模式 内核态驱动 用户态驱动
提供机制,而不是提供策略
机制:驱动程序能实现什么功能 策略:用户如何使用这些功能
设备的分类和特点Biblioteka 设备分类字符设备(char device) 字符设备 块设备(block device) 块设备 网络设备(network device) 网络设备
MODULE_LICENSE()---模块许可证声明 模块许可证声明
模块许可证(LICENSE)声明描述内核模块的许可权限 如果不声明LICENSE,模块被加载时,将收到内核被污染(kernel tainted)的警告
动手写一个内核模块
linux内核中sci驱动的调用流程

5. 中断处理程序返回:SCI中断处理程序执行完毕后,会返回到原来的执行流程,继续处 理其他的任务。
linux内核中sci驱动的调用流程
2. 中断处理程序调用:当系统发生与电源管理或系统控制相关的事件时,硬件会触发SCI 中断。当SCI中断发生时,CPU会暂停当前的执行流程,并跳转到注册的SCI中断处理程序。
linux内核中sci驱动的调用流程
3. SCI中断处理程序执行:SCI中断处理程序会根据具体的事件类型进行相应的处理。例 如,对于电源管理相关的事件,SCI中断处理程序可能会执行电源状态的检查、电源管理策略 的调整等操作。
需要注意的是,SCI驱动的具体实现可能会因不同的硬件平台和内核版本而有所差异。上 述流程仅为一般情况下的调用流程,实际情况可能会有所变化。在编写SCI驱动或进行相关开 发时,应该参考具体的硬件文档和内核源代码,以了解准确的调用流程和接口。
linux内核中sci驱动的调用流程
在Linux内核中,SCI(System Control Interrupt)驱动是用于处理系统控制中断的驱动 程序。SCI是一种特殊的中断,用于处理系统的电源管理和系统控制相关的事件。以下是SCI 驱动的基本调用流程:
1. 注册SCI中断处理程序:SCI驱动首先需要在系统启动时注册SCI中断处理程序。这通常 在驱动的初始化阶段完成。注册SCI中断处理程序的目的是告诉内核当有SCI中断发生时,应 该调用哪个函数来处理。
linux 驱动 内核态与用户态的方法
linux 驱动内核态与用户态的方法Linux 作为一个开源的操作系统,其内核和驱动程序的开发一直是开发者关注的焦点。
在 Linux 系统中,内核态和用户态是两个不同的运行环境,分别对应了操作系统内核和用户程序。
在驱动程序的开发中,涉及到内核态和用户态的交互,需要开发者了解内核态与用户态的方法。
首先,内核态和用户态是操作系统中的两种运行级别。
内核态是操作系统的最高特权级别,可以直接操作硬件资源和访问系统内存,而用户态则是应用程序运行的环境,受到操作系统的限制,不能直接访问硬件资源。
驱动程序一般运行在内核态,用于控制硬件设备和提供接口给用户程序调用。
在 Linux 系统中,内核态和用户态的切换是通过系统调用实现的。
系统调用是用户程序调用操作系统功能的一种方式,通过软中断将用户程序从用户态切换到内核态,让内核执行相应的操作。
在驱动程序的开发中,需要通过系统调用来实现内核态和用户态的交互。
在编写驱动程序时,需要使用一些特定的函数和数据结构来实现内核态与用户态的通信。
其中,包含了一些必要的函数接口和机制,如 file_operations 结构体、ioctl 函数、copy_to_user 和 copy_from_user 函数等。
这些函数和数据结构可以帮助开发者在内核态和用户态之间传递数据,并实现对硬件设备的控制和操作。
此外,在驱动程序的开发过程中,需要注意内核态与用户态的安全性和稳定性。
内核态具有最高特权级别,可以直接操作系统资源,因此在编写驱动程序时需要谨慎处理数据的传递和操作,避免造成系统崩溃或安全漏洞。
同时,需要考虑到用户态程序的异常情况和错误处理,确保系统的稳定性和可靠性。
总的来说,内核态与用户态的方法在 Linux 驱动程序的开发中起着重要的作用。
开发者需要了解内核态与用户态的区别和特点,利用系统调用和相关函数接口实现内核态与用户态的通信,确保驱动程序的安全性和稳定性。
只有深入理解内核态与用户态的方法,才能更好地开发出高效、稳定的 Linux 驱动程序。
linux内核调用手册

linux内核调用手册Linux内核调用手册是一份帮助开发人员理解和使用Linux内核API的重要参考资料。
作为一个开源操作系统,Linux内核提供了丰富的系统调用接口,使得开发人员可以通过这些接口与操作系统进行交互。
本文将介绍Linux内核调用手册的基本结构和内容,并探讨如何使用这些调用接口来开发和优化Linux应用程序。
Linux内核调用手册通常分为几个章节,包括进程管理、内存管理、文件系统、网络处理、设备驱动等。
每个章节都详细介绍了与该领域相关的系统调用接口和相关函数的使用方法、参数说明以及返回值的含义。
以进程管理为例,可以找到与创建、销毁进程相关的系统调用,如fork、execve、exit等。
对于每个系统调用,手册通常提供了以下信息:系统调用名称、函数原型、参数列表、返回值以及错误处理。
例如,对于fork系统调用,手册会提供fork函数的原型`pid_t fork(void)`,参数列表为空,返回值为子进程的进程ID,如果出现错误则返回-1。
此外,手册还包含了一些关于系统调用的通用信息,如系统调用的分类、调用号、函数库调用与系统调用的区别等。
这些信息有助于开发人员理解和使用系统调用接口,提高代码的可读性和可维护性。
在使用系统调用时,开发人员需要注意一些常见的错误和异常情况,手册也会提供一些示例代码和错误处理的建议。
作为开发人员,我们可以通过使用Linux内核调用手册来更好地理解和应用操作系统的底层机制。
通过使用系统调用接口,我们可以实现各种功能,如创建多线程程序、管理进程资源、进行网络通信等。
在设计和优化Linux应用程序时,我们可以通过调用合适的系统调用来实现高性能和高可靠性。
此外,由于Linux内核是开源的,开发人员可以根据需要修改和优化内核源代码。
内核源代码通常包含了实现系统调用接口的相关代码,我们可以通过研究和修改内核源代码来深入理解系统调用的实现原理,并实现更为高效的系统调用接口。
linux下内核与用户态间的交互机制
linux下内核与用户态间的交互机制(原创版)目录1.引言:介绍 Linux 内核与用户态的概念及其关系2.Linux 内核与用户态交互的方式2.1 系统调用2.2 信号2.3 消息队列2.4 套接字3.实例:fork() 系统调用4.特权级5.结论:总结 Linux 下内核与用户态间的交互机制的重要性正文1.引言Linux 是一个开源的操作系统,其最大的特点就是内核与用户态的交互机制。
在 Linux 系统中,内核负责管理系统的资源和运行状态,而用户态则负责运行应用程序。
内核与用户态之间的交互机制是 Linux 系统运行的核心,也是操作系统管理的关键。
2.Linux 内核与用户态交互的方式在 Linux 系统中,内核与用户态之间的交互主要通过以下几种方式实现:2.1 系统调用系统调用是操作系统提供给用户程序的一组应用编程接口 (API),用户程序可以通过系统调用请求操作系统内核提供的服务,如文件操作、进程管理等。
系统调用是内核与用户态之间最重要的交互方式之一。
2.2 信号信号是操作系统内核与用户程序之间进行异步通信的一种机制。
当发生某个特定事件时,如程序异常、硬件故障等,操作系统内核可以向用户程序发送信号,告知用户程序需要采取相应的措施。
2.3 消息队列消息队列是 Linux 系统中一种先进的通信机制,可以实现内核与用户态之间的双向通信。
消息队列是一种特殊的数据结构,用于存储消息,消息可以是内核与用户程序之间的通信信息,也可以是用户程序之间的通信信息。
2.4 套接字套接字是 Linux 系统中一种通用的通信接口,可以实现不同进程之间的通信,也可以实现内核与用户态之间的通信。
套接字提供了一种灵活的通信机制,可以满足不同场景下的通信需求。
3.实例:fork() 系统调用fork() 是 Linux 系统中一个典型的系统调用,用于创建一个新的进程。
当用户程序调用 fork() 时,操作系统内核会创建一个新的进程,并将新的进程的资源映射到原始进程的资源上。
linux应用层调用内核接口函数的实现方法
在Linux操作系统中,应用层调用内核接口函数主要有以下几种方法:
1. 系统调用(System Call):系统调用是应用程序请求内核服务的一种方式,它是应用程序与操作系统内核之间通信的桥梁。
通过系统调用,应用程序可以访问内核提供的各种服务,例如文件操作、进程控制、网络通信等。
2. 库函数(Library Function):库函数是应用程序可以直接调用的函数,这些函数通常是由C标准库提供的。
库函数在实现时通常会使用系统调用来与内核交互,因此实际上是通过库函数间接地调用了内核接口函数。
3. 设备驱动程序(Device Driver):设备驱动程序是内核的一部分,它负责管理硬件设备。
应用程序可以通过设备驱动程序来访问硬件设备,实现与硬件的交互。
设备驱动程序通常通过系统调用来与应用程序通信。
4. 套接字(Socket):套接字是一种通信机制,用于应用程序之间的通信。
通过套接字,应用程序可以与其他应用程序或远程主机进行通信。
套接字在实现时通常会使用系统调用来与内核通信,因此也可以视为一种间接调用内核接口函数的方式。
无论哪种方法,都需要使用系统调用接口来实现应用程序与内核之间的通信。
系统调用接口提供了一组函数,例如`syscall()`、`access()`、
`mmap()`等,应用程序可以通过这些函数来发起系统调用,请求内核服务。
在内核中,相应的服务会被实现为内核函数,这些函数可以访问内核的数据结构和资源,以完成相应的操作。
精选嵌入式LINUX设备驱动程序课件

设备的控制操作
对设备的控制操作可通过文件操作数据结构中的ioctl()函数来完成。控制操作与具体的设备有密切关系,需要根据设备实际情况进行具体分析。
设备的轮询和中断处理
轮询方式对于不支持中断的硬件设备,读写时需要轮流查询设备的状态,以便决定随后的数据操作。如果轮询处理方式的驱动程序被链接到内核,则意味着查询过程中,内核一直处于闲置状态。解决办法是使用内核定时器,进行定期查询。
主设备号与次设备号
次设备号用于标识使用同一设备驱动程序的不同硬件,并仅由设备驱动程序解释 当应用程序操作某个设备文件时,Linux内核根据其主设备号调用相应的驱动程序,并从用户态进入内核态驱动程序判断次设备号,并完成相应的硬件操作。
用户空间和内核空间
Linux运行在2种模式下内核模式用户模式内核模式对应内核空间,而用户模式对应用户空间。驱动程序作为内核的一部分,它对应内核空间,应用程序不能直接访问其数据,
帧缓冲设备驱动程序
LCD分类
LCD可由为液晶照明的方式有两种:传送式和反射式传送式屏幕要使用外加光源照明,称为背光(backlight),照明光源要安装在LCD的背后。传送式LCD在正常光线及暗光线下,显示效果都很好,但在户外,尤其在日光下,很难辩清显示内容。 反射式屏幕,则不需要外加照明电源,使用周围环境的光线(或在某些笔记本中,使用前部照明系统的光线)。这样,反射式屏幕就没有背光,所以,此种屏幕在户外或光线充足的室内,才会有出色的显示效果,但在一般室内光线下,这种显示屏的显示效果就不及背光传送式的。
文件操作结构体的主要函数
open: 用于打开文件设备release: 在关闭文件的调用read: 用于从设备中读取数据write: 向设备发送数据poll: 查询设备是否可读或可写ioctl: 提供执行设备特定命令的方法fasync: 用于设备的异步通知操作
Linux驱动之i2c用户态调用

一、概述I2C只有两条线,一条串行数据线:SDA,一条是时钟线SCL.正因为这样,它方便了工程人员的布线.二、用户态实现设备驱动在Linux内核代码文件i2c-dev.c中实现了I2C适配器设备文件的功能,针对每个适配器生成一个主设备号为89的设备节点(次设备号为0-255),I2c-dev.c并没有针对特定的设备而设计,只是提供了通用的read(),write(),和ioctl()等文件操作接口,在用户空间的应用层就可以借用这些接口访问挂接在适配器上的I2C设备的存储空间或寄存器,并控制I2C设备的工作方式。
i2c适配器的设备节点是/dev/i2c-x,其中x是数字。
由于适配器编号是动态分配的(和注册次序有关),所以想了解哪一个适配器对应什么编号,可以查看/sys/class/i2c-dev/目录下的文件内容。
三、用户态调用3.1、i2c-dev用户空间操作i2c,需要包含以下头文件。
打开适配器对应的设备节点i2c-dev为打开的线程建立一个i2c_client,但是这个i2c_client并不加到i2c_adapter的client链表当中。
他是一个虚拟的临时client,当用户打开设备节点时,它自动产生,当用户关闭设备节点时,它自动被释放。
3.2、ioctl()查看include/linux/i2c-dev.h文件,可以看到i2c支持的IOCTL命令1.#define I2C_RETRIES0x0701/*设置收不到ACK时的重试次数*/2.#define I2C_TIMEOUT0x0702/*设置超时时限的jiffies*/3.#define I2C_SLAVE0x0703/*设置从机地址*/4.#define I2C_SLAVE_FORCE0x0706/*强制设置从机地址*/5.#define I2C_TENBIT0x0704/*选择地址位长:=0for7bit,!=0for10bit*/6.#define I2C_FUNCS0x0705/*获取适配器支持的功能*/7.#define I2C_RDWR0x0707/*Combin ed R/W transfer(one STOP only)*/8.#define I2C_PEC0x0708/* !=0to use PEC with SMBus*/9.#define I2C_SMBUS0x0720/*SMBus transfer*/例如:1、设置重试次数:ioctl(fd, I2C_RETRIES,m);设置适配器收不到ACK时重试的次数为m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L i n u驱动之i c用户态调用集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN]一、概述I2C只有两条线,串行数据线:SDA,一条是时钟线SCL.正因为这样,它方便了工程人员的.二、用户态实现设备驱动在内核代码文件i2c-dev.c中实现了I2C适配器设备文件的功能,针对每个适配器生成一个主设备号为89的设备节点(次设备号为0-255),I2c-dev.c并没有针对特定的设备而设计,只是提供了通用的read(),write(),和ioctl()等文件操作接口,在用户空间的应用层就可以借用这些接口访问挂接在适配器上的I2C设备的存储空间或寄存器,并控制I2C设备的工作方式。
i2c适配器的设备节点是/dev/i2c-x,其中x是数字。
由于适配器编号是动态分配的(和注册次序有关),所以想了解哪一个适配器对应什么编号,可以查看/sys/class/i2c-dev/目录下的文件内容。
三、用户态调用3.1、i2c-dev用户空间操作i2c,需要包含以下头文件。
打开适配器对应的设备节点i2c-dev为打开的线程建立一个i2c_client,但是这个i2c_client并不加到i2c_adapter的client链表当中。
他是一个虚拟的临时client,当用户打开设备节点时,它自动产生,当用户关闭设备节点时,它自动被释放。
3.2、ioctl()查看include/linux/i2c-dev.h文件,可以看到i2c支持的IOCTL命令1.#defineI2C_RETRIES0x0701/*设置收不到ACK时的重试次数*/2.#defineI2C_TIMEOUT0x0702/*设置超时时限的jiffies*/3.#defineI2C_SLAVE0x0703/*设置从机地址*/4.#defineI2C_SLAVE_FORCE0x0706/*强制设置从机地址*/5.#defineI2C_TENBIT0x0704/*选择地址位长:=0for7bit,!=0for10bit*/6.#defineI2C_FUNCS0x0705/*获取适配器支持的功能*/7.#defineI2C_RDWR0x0707/*CombinedR/Wtransfer(oneSTOPonly)*/8.#defineI2C_PEC0x0708/*!=0tousePECwithSMBus*/9.#defineI2C_SMBUS0x0720/*SMBustransfer*/例如:1、设置重试次数:ioctl(fd,I2C_RETRIES,m);设置适配器收不到ACK时重试的次数为m。
默认的重试次数为12、设置超时ioctl(fd,I2C_TIMEOUT,m);设置SMBus的超时时间为m,单位为jiffies。
3、设置从机地址ioctl(fd,I2C_SLAVE,addr);ioctl(fd,I2C_SLAVE_FORCE,addr);在调用read()和write()函数之前必须设置从机地址。
这两行都可以设置从机的地址,区别是第二行无论内核中是否已有驱动在使用这个地址都会成功,第一行则只在该地址空闲的情况下成功。
由于i2c-dev创建的i2c_client不加入i2c_adapter 的client列表,所以不能防止其它线程使用同一地址,也不能防止驱动模块占用同一地址。
4、设置地址模式ioctl(file,I2C_TENBIT,select)如果select不等于0选择10bit地址模式,如果等于0选择7bit模式,默认7位模式。
3.3数据包i2c发送或者接收一次数据都以数据包(structi2c_msg)封装addr是设备从地址。
flags是通信标志,发送数据为0,接收数据为I2C_M_RD。
len是数据长度buf是传输数据3.4、接受数据设备驱动中我们通常调用/driver/i2c/i2c-core.c定义的接口i2c_master_recv来接收一次数据。
通过i2c_transfer调用数据包。
inti2c_master_recv(structi2c_client*client,char*buf,intcount){structi2c_adapter*adap= client->adapter;//获取adapter信息structi2c_msgmsg;//定义一个临时的数据包intret;msg.addr=client->addr;//将从机地址写入数据包msg.flags=client->flags&I2C_M_TEN;//将从机标志并入数据包msg.flags|=I2C_M_RD;//将此次通信的标志并入数据包msg.len=count;//将此次接收的数据字节数写入数据包msg.buf=buf;ret=i2c_transfer(adap,&msg,1);//调用平台接口接收数据/*Ifeverythingwentok(i.e.1msgtransmitted),return#bytestransmitted,elseerrorcode.*/ret urn(ret==1)count:ret;//如果接收成功就返回字节数}EXPORT_SYMBOL(i2c_master_recv);参考驱动i2c_master_recv()函数封装属于自己用户态的接受函数。
用户态是通过ioctl(handle->fd,I2C_RDWR,&data)函数与i2c从设备进行数据交互。
主要有2个步骤:首先是写入需要读取的寄存器的地址,然后从寄存器中读取数据。
需要2个数据包。
如下:3.5、发送数据设备驱动中我们通常调用/driver/i2c/i2c-core.c定义的接口?i2c_master_send 来发送一次数据。
通过i2c_transfer调用数据包inti2c_master_send(structi2c_client*client,constchar*buf,intcount){intret;structi2c_a dapter*adap=client->adapter;//获取adapter信息structi2c_msgmsg;//定义一个临时的数据包msg.addr=client->addr;//将从机地址写入数据包msg.flags=client->flags&I2C_M_TEN;//将从机标志并入数据包msg.len=count;//将此次发送的数据字节数写入数据包msg.buf=(char*)buf;//将发送数据写入数据包ret=i2c_transfer(adap,&msg,1);//调用平台接口发送数据/*Ifeverythingwentok(i.e.1msgtransmitted),return#bytestransmitted,elseerrorcode.*/ret urn(ret==1)count:ret;//如果发送成功就返回字节数}EXPORT_SYMBOL(i2c_master_send);参考驱动i2c_master_send()函数封装属于自己用户态的接受函数。
用户态是通过ioctl(handle->fd,I2C_RDWR,&data)函数与i2c从设备进行数据交互。
每次要写入两个字节数据主要包括写入的寄存器地址和要写入的数据。
只需发送一次数据包。
如下:3.6、使用案例1.#include<stdio.h>2.#include<linux/i2c.h>3.#include<linux/i2c-dev.h>4.#include<fcntl.h>5.#include<stdio.h>6.#include<unistd.h>7.#include<sys/ioctl.h>8.#include<string.h>9.#include<stdlib.h>10.#defineI2C_FILE_NAME"/dev/i2c-1"11.#defineI2C_ADDR0x4012.intfd;13.inti2c_open()14.{15.fd=open(I2C_FILE_NAME,O_RDWR);16.if(fd<0){17.perror("Unabletoopeni2ccontrolfile");18.return1;19.}20.}21.inti2c_write(intfd,unsignedchardev_addr,unsignedcharreg_addr,unsignedcharval)22.{23.intret;24.unsignedcharbuf[2];25.structi2c_rdwr_ioctl_datadata;26.structi2c_msgmessages;27.buf[0]=reg_addr;28.buf[1]=val;29.messages.addr=dev_addr;//deviceaddress30.messages.flags=0;//write31.messages.len=2;32.messages.buf=buf;//dataaddress33.data.msgs=&messages;34.data.nmsgs=1;35.if(ioctl(fd,I2C_RDWR,&data)<0){36.printf("writeioctlerr\n");37.return1;38.}leep(1000);40.return1;41.}42.inti2c_read(intfd,unsignedcharaddr,unsignedcharreg,unsignedchar*val)43.{44.intret;45.structi2c_rdwr_ioctl_datadata;46.structi2c_msgmessages[2];47.messages[0].addr=addr;//deviceaddress48.messages[0].flags=0;//write49.messages[0].len=sizeof(reg);50.messages[0].buf=®//dataaddress51.messages[1].addr=addr;//deviceaddress52.messages[1].flags=I2C_M_RD;//read53.messages[1].len=sizeof(val);54.messages[1].buf=val;55.data.msgs=messages;56.data.nmsgs=2;57.if(ioctl(fd,I2C_RDWR,&data)<0){58.printf("readioctlerr\n");59.return1;60.}61.return0;62.}63.intmain()64.{65.inti;66.unsignedcharbuf[4];67.unsignedcharval[]={0x04,0x05,0x06,0x07};68.i2c_open();69.for(i=0;i<4;i++)70.i2c_write(fd,I2C_ADDR,i,val[i]);71.memset(buf,0x00,sizeof(buf));72.for(i=0;i<sizeof(buf);i++){73.if(i2c_read(fd,I2C_ADDR,i,&buf[i])){74.printf("Unabletogetregister!\n");75.}76.}77.for(i=0;i<4;i++)78.printf("buf[%d]=%d\n",i,buf[i]);79.}。