2020机器人技术等级考试六级课程第五章03 液晶显示 机器人包老师
2019机器人技术等级考试一级考试试卷03

2019机器人技术等级考试一级考试03试卷编号:1196393试卷录入者:机器人包老师(玩得趣科教中心)试卷总分:100出卷时间:2020-01-08 13:06答题时间:40分钟1.关于轮轴,下列说法中正确的是哪项?[2分][2分]A.一定是省力机械B.动力放在轴上能省力C.动力放在轮上能省力D.一定是费力机械2.下面关于齿轮的说法,错误的是?[2分][2分]A.齿轮必须是圆形的B.组合在一起的齿轮,齿的大小要一致C.齿轮可以是椭圆形的D.齿轮的固定轴必须在中心3.机器人驱动方式不包括?[2分][2分]A.电力驱动B.水驱动C.气压驱动D.液压驱动4.生活中为了更加省力,而利用了斜面原理的楔形是()[2分][2分]A.斧头B.锤子C.扳手D.螺丝刀5.传动链和齿轮传动共有的特点是?[2分][2分]A.同向传动B.噪音小C.准确无误的传递动力D.自由调节距离6.关于齿轮,下列说法不正确的是[2分]A.大齿轮带动小齿轮,升速B.小齿轮带动大齿轮,增加扭矩C.小齿轮带动大齿轮,降速D.带动同样的齿轮,不能升速但能降速7.如图,关于该搅拌器模型说法错误的是?[2分][2分]A.该模型中有轮轴的应用B.该模型用到了齿轮传动C.该模型采用了齿轮加速装置D.该模型作用是实现减速效果8.下列哪一个是机器人?[2分][2分]A.aB.bC.cD.d9.如下图中,动滑轮有()个。
[2分][2分]A.1B.2C.3D.010.如图我们用()改变了施力方向。
[2分][2分]A.定滑轮B.动滑轮C.滑轮组D.齿轮11.关于力臂,下列说法不正确的是[2分]A.支点到动力作用点的距离叫动力臂B.支点到阻力作用点的距离叫阻力臂C.支点到力的作用线的距离叫力臂D.杠杆的力臂一定在杠杆之上12.下列物品用到了齿轮的是?[2分][2分]A.aB.bC.cD.d13.下图中,沿着哪个斜面向上拉动小车最费力[2分][2分]A.AB.BC.CD.D14.下图中,最费力的是?[2分][2分]A.B.C.D.15.如图,哪个滑轮是动滑轮?[2分][2分]A.aB.bC.cD.d16.关于单摆说法正确的是?[2分][2分]A.所有单摆的周期都一样B.增加摆长可以让单摆变慢C.增加摆长可以让单摆变快D.单摆周期跟摆长无关17.下图中,沿着哪个斜面向上拉动小车最省力[2分][2分]A.AB.BC.CD.D18.是什么原因让我们能够在地面上行走?[2分][2分]A.因为我们站在地上B.因为我们穿了鞋C.因为我们的鞋与地面之间存在摩擦力D.因为地球在自转19.以下哪个机械结构不能用来省力?[2分][2分]A.动滑轮B.定滑轮C.斜面D.省力杠杆20.已知物体静止在斜面上,请问物体受到哪些力?[2分]A.自身的重力B.斜面对物体的支持力C.物体受到的摩擦力D.以上都是21.如图,从地面到T点那条路走起来最省力?[2分][2分]A.aB.bC.cD.d22.下列哪个不是机器人?[2分][2分]A.aB.bC.cD.d23.下列没有应用斜面原理的是()[2分][2分]A.B.C.D.24.下图滑轮组中最省力的是?[2分][2分]A.aB.bC.cD.d25.下图所示的机器人“大白”是哪部电影中的角色[2分][2分]A.《铠甲勇士》B.《功夫熊猫》C.《超能陆战队》D.《哆啦A梦》26.如下图所示指甲刀,在剪指甲时,F1是手施加在剪刀上的力,则()是支点[2分]A.A点B.B点C.C点D.D点27.车轮上有凹凸不平的花纹的作用是[2分]A.装饰好看B.增加摩擦力C.省油耐用D.乘坐舒适28.生活中属于费力杠杆的是()[2分][2分]A.B.C.D.29.下列说法不正确的是[2分]A.利用机械既可以减轻体力劳动,又可以提高工作效率B.杠杆是一种简单的机械,杆的形状可以是直的,也可以是弯曲的C.滑轮是属于杠杆变形的一种简单机械D.以上说法均不正确30.下列说法错误的是()[2分][2分]A.功的大小是力乘以力的方向上移动的距离,单位是焦耳B.只要省力就会费距离,费力就会省距离C.使同一物体达到相同的作用效果,对他做的功不是固定的D.任何机械都不省功31.下面是费力杠杆的是[4分]A.理发剪B.动滑轮C.镊子D.扳手32.在日常生活中,常用的轮轴有()[4分][4分]A.门把手B.水杯C.手摇转笔刀D.方向盘33.下列关于滑轮组说法正确的是()[4分][4分]A.能省力B.能改变用力方向C.只能包含两个滑轮D.吊车中没有用到滑轮34.电风扇为什么可以使人感觉凉爽?[4分][4分]A.电风扇吹出的风加快了人体表面空气的流动速度B.电风扇吹出的风会加快汗水的蒸发速度C.电风扇是电器D.电风扇能吹出凉风35.下列生活用品中,应用杠杆原理的是()[4分][4分]A.镊子B.钓鱼竿C.盘山公路D.筷子36.在实际中的秋千、吊车、电线塔等结构中都运用了四边形原理。
2023年12月青少年机器人技术等级考试理论综合试卷六级真题及答案

2023年12月青少年机器人技术等级考试理论综合试卷六级真题(含答案)分数:100题数:30一、单选题(共20题,共80分)1.题IPv6地址长度及其地址分隔符分别是?()A.32和.B.128和.C.32和:D.128和:试题编号:20231123210721769试题类型:单选题标准答案:D2.浏览网页时,使用应用层的协议是?()A.HTTPB.TCPC.UDPD.IP试题编号:20231123210721816试题类型:单选题标准答案:A3.题ESP32主控板的连接方式如下图所示,手机通过ESP32主控板连接到路由器,该主控板的WiA.服务器B.STAC.APD.STA+AP试题编号:20231123210721863试题类型:单选题标准答案:D4.下列选项中,属于域名的是?()A.B.C.D.试题编号:20231123210721910试题类型:单选题标准答案:B5.题I2C串行通信有两根数据线,有关串行时钟线SCL描述正确的是?()A.该数据线传送的是时钟信号B.主设备可以通过该数据线向从设备发送数据C.时钟信号由从设备发出D.数据线通过下拉电阻连接到GND试题编号:20231123210722097试题类型:单选题标准答案:A6.题I2C串行通信,当总线空闲时,串行数据线的电平为?()A.低电平B.高电平C.上升沿D.下降沿试题编号:20231123210722144试题类型:单选题标准答案:B7.题ESP32for Arduino I2C类库的下列成员函数中,用于将数据队列发送给从设备的成员函数是A.Wire.read()B.Wire.write()C.Wire.beginTransmission()D.Wire.endTransmission()试题编号:20231123210722175试题类型:单选题标准答案:D8.题ESP32for Arduino I2C类库的成员函数begin(),下列描述正确的是?()A.从接收缓冲区中接收数据B.开始了进行数据传输C.主设备向从设备发送读取数据请求D.初始化,并作为主设备加入I2C试题编号:20231123210722222试题类型:单选题标准答案:D9.题MPU6050姿态传感器所包含的功能单元中,用于获取加速度数据的是?()A.加速度计B.陀螺仪C.数字运动处理器D.磁力计试题编号:20231123210722269试题类型:单选题标准答案:A10.通过MPU6050姿态传感器获取的数据解析出姿态角,当传感器绕水平轴上下旋转时,该角度是A.PitchB.YawC.DMPD.Roll试题编号:20231123210722331试题类型:单选题标准答案:A11.题SPI通信,时钟数据线名称是?()A.SCLKB.MOSIC.MISOD.SS试题编号:20231123210722378试题类型:单选题标准答案:A12.题ESP32for Arduino SPI类库的下列成员函数中,用于按照设定参数启动SPI通信的成员函A.SPI.begin()B.SPI.beginTransaction()C.SPI.endTransaction()D.SPI.transfer()试题编号:20231123210722425试题类型:单选题标准答案:B13.题HTML文档中,下列用于标记主体开始的标签是?()A.<topic>B.<head>C.<body>D.<html>试题编号:20231123210722645试题类型:单选题标准答案:C14.步进电机AccelStepper类库的成员函数中,成员函数moveTo()功能描述正确的是?()A.设定步进电机运动到相对当前位置的脉冲数量B.设定步进电机运动到相对初始基准位置的脉冲数量C.启动步进电机恒速转动D.启动步进电机以设定的加速度和最大速度转动试题编号:20231123210722692试题类型:单选题标准答案:B15.题ESP32for Arduino提供的WiFi类库的成员函数中,成员函数WiFi.begin()的作用是?(A.设置主控板以STA模式连接到SSIDB.设置主控板为softAP模式C.返回STA的IP地址D.创建softAP,并设定SSID和密码试题编号:20231123210722739试题类型:单选题标准答案:A16.题ESP32for Arduino,客户端向服务器发送查询数据HTTP请求的方法是?()A.GETB.PUTC.POSTD.PATCH试题编号:20231123210722786试题类型:单选题标准答案:A17.两块ESP32主控板A和B通过WiFi互联,A为AP,其ssid为“ESP32”,password为“1234A.B.C.D.试题编号:20231123210722911试题类型:单选题标准答案:A18.题ESP32主控板与一个I2C接口的外设模块进行通信,外设模块的地址为addr,寄存器地址为A.B.C.D.试题编号:20231123210722973试题类型:单选题标准答案:C19.使用AccelStepper步进电机库控制步进电机转动,下列选项中,设置步进电机按照加速度为A.B.C.D.试题编号:20231123210723036试题类型:单选题标准答案:B20.下列选项中,用可获取本机电脑IP地址的命令是?()A.ipconfigB.msconfigC.pingD.find试题编号:20231123210721707试题类型:单选题标准答案:A二、多选题(共5题,共10分)试题编号:20231123210721987试题类型:多选题标准答案:A|B|C|D试题编号:20231123210722473试题类型:多选题标准答案:A|B|C试题编号:20231123210722520试题类型:多选题标准答案:A|B|C试题编号:20231123210722817试题类型:多选题标准答案:A|B试题编号:20231123210721941试题类型:多选题标准答案:B|D三、判断题(共5题,共10分)26.网页浏览时,由本地计算机率先发出请求,所以本地计算机是客户端。
全国青少年机器人技术等级考试标准6级
全国青少年机器人技术等级考试标准6级
科目:代码编程、电子电路搭建、机器人常用知识。
形式:软件知识、硬件知识、机器人常用知识采用上机考试形式。
电子电路搭建、机器人搭建采用现场实际操作形式。
器材及软件:
结构件:能够满足考试要求的结构件均可。
核心控制板:ESP32开源硬件控制板,包含硬件的原理图、引导程序(如果含)、操作系统(如果含)、开源的开发环境及源码。
目前支持的控制板种类及型号,请至官方网站查询。
电子部分:与核心控制板配套的电子元件或模块。
编程语言:Arduino C/C++、ESP32 for Arduino
IDE软件:能够完成开源硬件控制板程序代码编写的软件即可。
目前支持的软件包括Arduino IDE等。
考核内容:
(一)知识
1.了解中国及世界机器人领域的知名产品,重大工程项目及前沿科技时事
2.理解I2C总线通信基础知识
3.理解SPI总线通信基础知识
4.理解互联网基础知识
5.理解HTML的基本结构
6.理解步进电机的工作原理及运动控制
7.理解PID控制基本概念
8.理解姿态传感器的基础知识
9.掌握利用I2C库进行数据的读写操作
10.掌握利用WiFi库进行Web服务器的建立、数据读入和输出
(二)机器人搭建
1.掌握步进电机的使用,能够利用它们完成指定的动作
2.掌握通过WiFi对硬件进行读写操作
3.掌握通过I2C库获取传感器的值,如获取I2C接口的姿态传感器的值
4.掌握通过I2C库控制液晶显示屏
5.掌握利用中断读取码盘数据
6.掌握比例控制,控制机器人按照指定路线移动。
机器人包老师 青少年软件编程等级考试 Python二级(理论试卷)模拟卷9

青少年软件编程等级考试Python二级(理论试卷)模拟卷9试卷编号:867513试卷录入者:机器人包老师(玩得趣科教中心)试卷总分:100出卷时间:2020-2-16 16:15答题时间:40分钟本试卷从考试酷examcoo网站导出,文件格式为mht,请用WORD/WPS打开,并另存为doc/docx格式后再使用1.以下选项对于import保留字描述错误的是Aimport可以用于导入函数库或者库中的函数B可以使用from jieba import lcut 引入jieba库C使用import jieba as jb,引入函数库jieba,取别名jbD使用import jieba 引入jieba库正确答案: B2.以下选项中不可用作Python标识符的是3.14姓名__Name__\#;Python语言不支持面向对象Python语言是解释型语言Python语言是编译型语言3.14不是整数类型的数值type(100)表达式结果可能是<class 'int'>,也可能是<class 'float'>oct(100)表达式结果获得十六进制数hex(100)表达式结果获得八进制数正确答案: A6.运行以下程序,输出结果的是:322.52.50正确答案: C7.17. 运行以下程序,输出的Python数据类型是:字符串类型浮点数类型整数类型复数类型正确答案: B8.下面代码的输出结果是:3.141593.141593Pi=3.143.1416Python通过try、except等保留字提供异常处理功能ZeroDivisionError是一个变量未命名错误NameError是一种异常类型仅循环非正常结束后执行(以break结束)仅循环正常结束后执行总会执行永不执行正确答案: B11.以下代码执行的输出结果是:出错数据可视化Web开发ArcadeTensorFlowCaffe2matplotibopenpyxl生成一个[0.0, 1.0)之间的随机小数生成一个k比特长度的随机整数设置初始化随机数种子a生成一个随机整数正确答案: C16.下面代码的输出结果是407408153159正确答案: A17.给出下面代码:执行代码出错Python语言,是,脚本,语言Python语言是脚本语言无输出正确答案: CPython使用del保留字定义一个函数函数能完成特定的功能,对函数的使用不需要了解函数内部实现原理,只要了解函数的输入输出方式即可。
(word完整版)全国青少年机器人技术等级考试理论综合试卷(一级)20190316
20190316全国青少年机器人技术等级考试理论综合试卷(一级)试卷编号:953301试卷录入者:机器人包老师试卷总分:100出卷时间:2019—07-15 13:04答题时间:30分钟分数:100 题数:45一、单选题(共30题,每题2分,共60分)1。
以下属于工业机器人特点的是?[2分]A。
能够长时间从事单调的动作B.具有亲和力,能够与人亲近C.具有人的外形D.具有机械腿,能行走参考答案:A2.机器人的英文单词是?[2分]A。
robotB.rebotC。
boretD.boter参考答案:A3.如图,关于蜗轮蜗杆说法正确的是?[2分]A.一般蜗轮做主动件B。
一般蜗杆做主动件C。
蜗轮可以轻易带动蜗杆D.蜗杆不能带动蜗轮参考答案:B4.如图,齿轮传动说法正确的是?[2分]A。
这是加速装置B。
这是减速装置C。
大齿轮比小齿轮的转速快D。
大齿轮和小齿轮的轮齿形状大小不一样参考答案:A5。
盘山公路总是修的弯弯曲曲,环绕山坡盘山而上,而不是从山下直通山顶,这是为了?[2分]A.美观B.省力C。
经济D.省距离参考答案:B6.如图,哪个物品不是轮轴的应用?[2分]A。
aB。
bC.cD。
d参考答案:C7.滑轮组是多个动滑轮和( )组成的。
[2分]A.动滑轮B.定滑轮C.齿轮D。
履带轮参考答案:B8。
如图沿着斜面推同一质量的物体,以下哪个更省力?[2分]A。
aB.bC。
cD。
d参考答案:D9。
CPU当于机器人的()。
[2分]A.手臂B.大脑C。
心脏D.皮肤参考答案:B10.哪种方法推物体更省力?[2分]A。
2人平移推物体B.将物体放在推车上,推动物体C。
一样费力D。
一样省力参考答案:B11。
图中,应用省力杠杆的是?[2分]A。
aB.bC。
cD.d参考答案:C12.下列哪个是机器人?[2分] A.aB。
bC。
cD。
d参考答案:C13.以下多边形,具有良好稳定性的是?[2分]A.三角形B.平行四边形C。
梯形D。
五边形参考答案:A14.关于链传动说法错误的是?[2分]A.链传动中链轮的转动方向相反B。
2020机器人技术等级考试五级课程第二章数码管计时器03按键驱动 机器人包老师

定义数组时,可否采用变量来定义数组元素的个数?数组的下标从0还是1开始?定义二维数组时,第二维度声明可否省略?本章目录一位数码管原理及数字显示一位数码管数字显示 -- 数组74HC595移位寄存器芯片一位数码管数字显示 -- 74HC595 四位数码管 -- 74HC595级联输出 四位数码管 -- 单数显示按键--开关控制LED灯(按键消抖) 按键计时器主要目的:数组、位操作按键驱动74HC595移位寄存器芯片--按键驱动引脚标识说明1~7 Q1~Q7 并行数据输出管脚8 GND 电源地9 Q7’串行数据输出,级联时接到下一个595的DS端10 MR 复位,低电平复位11 SH_CP 数据输入时钟线12 ST_CP 输出锁存时钟线13 OE 输出使能,通常置为低,即始终输出14 DS 串行数据输入15 Q0 并行数据输出管脚16 VCC 电源74HC595寄存器芯片 -- 串入并出⏹由移位寄存器和数据寄存器组成⏹ Ds引脚:输入数据⏹ SH_CP引脚:上升沿数据移位⏹ ST_CP引脚:上升沿更新数据●74HC595--一位数码管模块1个●按键开关 2个●10K电阻2个●杜邦线●准备:黄色数据线连接到VCC,连续按按键B 8次,然后按按键A,此时一位数码管熄灭。
●操作一:黄色数据线连接到地,连续按按键B 3次,然后按按键A,观看数码管的显示结果。
操作二:将黄色数据线连接到VCC,首先按一下按键B,然后按一下按键A,重复循环2次,观看数码管的显示结果。
本小节内容复习:5-6级教材P38-P42 本小节作业思考:5-6级教材P59 题5-6。
机器人技术等级考试一级课程一级复习总结 机器人包老师

一级目录目录第一章:一级标准第二章:机器人第三章:基本结构第四章:能量守恒第五章:杠杆原理第六章:齿轮第七章:滑轮第八章:做功第九章:传动链一级标准理论1. 了解主流的机器人影视作品及机器人形象2. 掌握稳定结构和不稳定结构的特性3. 掌握齿轮组变速比例的计算4. 熟练区分省力杠杆和费力杠杆5. 熟练区分哪种滑轮会省力6. 了解带传动和链传动各自的优缺点7. 了解不同种类的齿轮实操1. 基本结构认知,了解重心和重力的概念2. 掌握六种简单机械原理(杠杆,轮轴,滑轮,斜面,楔,螺旋)3. 了解齿轮和齿轮比的概念4. 了解链传动和带传动的概念5. 了解机器人常用底盘(轮式及履带)机器人机器人(Robot)是自动执行工作的机器装置。
它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
科幻小说中提出“机器人三大定律”:第一定律:机器人不得伤害人类个体,或者目睹人类个体将遭受危险而袖手不管第二定律:机器人必须服从人给予它的命令,当该命令与第一定律冲突时例外第三定律:机器人在不违反第一、第二定律的情况下要尽可能保护自己的生存。
练习基本结构结构结构体:为了实现某种功能而建造的物体叫做结构体。
基本工具介绍:钉子、螺丝、螺丝钉、螺丝杆、螺栓、斜面、楔形、螺旋、螺丝刀、扳手等。
斜面:指与水平方向不为零的夹角的平面。
斜面是一种简单机械,可用于克服垂直提升重物的困难,省力但是费距离。
斜面的工作原理:斜面与平面的倾角越小,斜面较长,则省力越大,但费距离。
斜面与平面的倾角越大,斜面较短,则省力越小,但省距离。
楔形楔形:楔是斜面的应用,原指上厚下薄的小木橛,在结构中表示一头尖一头稍粗的物品。
生活中常见的应用为斧子,钉子等。
螺旋螺旋:螺旋是一种简单机械,是斜面的变形。
生活中常见的应用为螺丝钉、螺旋桨、压榨机等。
稳定稳定性分析:每个物体都是由简单的图形构成的,也就是说物体的每个面都是由圆,三角形,四边形和多边形构成的。
机器人技术教育等级考试大纲考级标准(机器人包老师)

中国国际科技促进会青少年人工智能教育普及工作委员会青少年机器人教育等级评测大纲(V1.0)中国国际科技促进会《青少年机器人技术等级教育规范》团体标准编制组 《青少年人工智能教育创新与实践的探索研究》课题组青少年机器人教育等级评测中心2019年10月青少年机器人教育一级大纲 主题:简单手动机械结构与力的了解对象:无源模型理论部分1、决定物体稳定性的几个方面2、稳定结构与不稳定结构的特点解析3、力的讲解4、杠杆原理的原理与应用5、常见省力杠杆、费力杠杆及变形6、齿轮传动与皮带传动的特点解析技术部分1、零件的加长、加宽、搭高2、灵活转动的常用技巧3、省力杠杆、费力杠杆4、齿轮的加速、减速及应用5、稳定结构与不稳定结构对应作品以及变形6、皮带传动在模型中的应用青少年机器人教育二级大纲 主题:复杂机械结构与马达的使用应用对象:有源模型理论部分1、常见的力的特点与解析2、力的分解3、常见四边形的特点与边长关系4、圆在轮轴中的应用5、电与磁的转换6、常见四连杆机构以及应用7、曲柄、摇杆、滑块、滑杆等特点与应用8、摩擦力的特点与解析9、压力与压强的关系技术部分1、高级齿轮传动在模型中的应用2、链传动在模型中的应用3、曲柄滑杆、滑块等结构在模型中的应用4、弹射装置的搭建5、能够利用结构原理对作品进行适当创新青少年机器人教育三级大纲主题:简单编程思维与结构的结合,使用图形化软件进行程序编写。
对象:有源模型结构部分1、了解常见机器人的几种结构模式并能够搭建。
2、会搭建常用车的基础平台。
3、两驱、四驱的特点及模型应用。
4、能够将一二级中用到的结构与基础平台结合,对机器人进行创新。
编程部分1、了解输入、输出的原理与应用。
2、了解数字量、模拟量的特点以及对应程序编写。
3、了解常见传感器的工作原理。
4、熟知编程的三种结构。
5、了解与、或、非三种逻辑关系。
6、用对应的图形化软件进行程序编写。
7、建立良好的变成思维并能够通过流程图画出。
全国青少年机器人技术等级考试试卷(二级)2018年0616
20180616全国青少年机器人技术等级考试试卷(二级)试卷编号:866203试卷录入者:机器人包老师试卷总分:100出卷时间:2018-12-25 15:04答题时间:30分钟分数:100 题数:50一、单选题(共30题,每题2分,共60分)1.下图中,能够将圆周运动转化为往复摆动的是?[2分]A.aB.bC.cD.d参考答案:C2.1969年,()提出了“恐怖谷理论”:当人形玩具和机器人仿真度超过一个临界值,人们对它的好感度会突然降低,直至谷底。
[2分]A.约瑟夫•英格伯格B.乔治•德沃尔C.阿西莫夫D.森昌弘参考答案:D3.下列选项中,关于连杆机构说法错误的是?[2分]A.挖掘机中有连杆机构B.雨刷器中有连杆机构C.连杆机构必须是两个杆构成D.骑自行车时大腿和小腿也相当于连杆机构参考答案:C4.如下图所示不完全齿轮机构,主动轮转动(),从动轮可以转动1圈。
[2分]A.1圈B.2圈C.3圈D.4圈参考答案:D5.如果制造一个机器人确保其向一个方向移动,我们需要的装置是?[2分]A.棘轮机构B.连杆机构C.杠杆结构D.轮传动参考答案:A6.下列关于凸轮机构说法正确的是?[2分]A.凸轮机构不属于间歇运动机构B.凸轮机构按照凸轮的形状可分为盘形凸轮、圆周凸轮和移动凸轮C.凸轮机构的从动件只能直线运动D.凸轮机构的从动件只能往复摆动参考答案:B7.下列关于机器人说法不正确的是?[2分]A.机器人是自动控制机器的总称B.高仿真机器人是整合了控制论、机械、电子、计算机与人工智能等的产物C.机器人必须是人形的D.机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成参考答案:C8.下列选项中,不属于常用机器人驱动方式的是?[2分]A.电力驱动B.液压驱动C.气压驱动D.风力驱动参考答案:D9.约瑟夫•英格伯格和乔治•德沃尔联手制造了第一台?[2分]A.水下机器人B.服务机器人C.军用机器人D.工业机器人参考答案:D10.下列凸轮机构是几何锁合的是?[2分]A.aB.bC.cD.d参考答案:C11.下图机构,属于哪种棘轮机构?[2分]A.摩擦式棘轮机构B.外啮合棘轮机构C.内啮合棘轮机构D.双动式棘轮机构参考答案:C12.如下图所示棘轮机构中,说法不正确的是?[2分]A.图中棘轮机构属于齿式棘轮机构B.图中棘轮机构属于外啮合棘轮机构C.如果两个棘爪都是主动棘爪,则该棘轮能实现双向运动D.图中棘轮机构属于摩擦式棘轮机构参考答案:D13.在黄帝时代出现的一种能指路的机械装置被称为?[2分]A.指南车B.指北针C.风向仪D.地动仪参考答案:A14.凸轮机构中从动件的运动规律取决于?[2分]A.凸轮旋转转速B.凸轮大小C.凸轮轮廓曲线D.凸轮颜色参考答案:C15.下列选项中,说法错误的是?[2分]A.电动机是为机械提供动力的装置B.电机有直流电机和交流电机C.电动机应用广泛,如各种机床、电动机械、家用电器等D.电动机用于将机械能转化为电能参考答案:D16.下列选项中,属于曲柄滑块的是?[2分]A.aB.bC.cD.d参考答案:B17.皮带传动的特点不包括?[2分]A.可实现远距离传动B.可以保护机械C.时间有延缓D.可以准确无误地传递动力参考答案:D18.关于链传动说法正确的是?[2分]A.链传动适合远距离传动B.链传动中的轮可以不在同一平面内C.链传动中轮的旋转方向不同D.链传动在突然变速时不容易断裂参考答案:A19.如下图所示皮带传动,说法正确的是?[2分]A.主动轮和从动轮转动方向相反B.从动轮的转速大于主动轮的转速C.主动轮和从动轮的转动方向相同D.皮带传动只有这一种连接方式参考答案:C20.下图中,属于平面四杆机构的是?[2分]A.aB.bC.cD.d参考答案:A21.小明想设计一个电机驱动扇子摇摆的机器人,那么它可以利用以下哪种机械结构使电机的转动转化为扇子的摇摆?[2分]A.曲柄摇杆B.棘轮C.轮轴D.滑轮参考答案:A22.下列选项中,关于摩擦力的说法正确的是?[2分]A.汽车在冰面容易打滑,是因为冰面很光滑B.人们在鞋底增加花纹是为了减小摩擦力C.摩擦力永远是竖直向下的D.静止的物体就会受到静摩擦力参考答案:A23.下列关于齿轮传动说法正确的是?[2分]A.大齿轮带动小齿轮能实现减速B.平行啮合的两个齿轮转动方向相反C.小齿轮带动大齿轮能实现加速D.齿轮传动适用于远距离的传动参考答案:B24.以下装置中,动力传递会产生延迟点是?[2分]A.皮带传动装置B.齿轮传动装置C.链条传动装置D.曲柄连杆装置参考答案:A25.下列用品中,应用了棘轮机构的有?[2分]A.自行车B.门把手C.跷跷板D.秋千参考答案:A26.下列选项中,属于曲柄摇杆机构的是?[2分]A.aB.bC.cD.d参考答案:B27.下列选项中,属于凸轮机构的是?[2分]A.aB.bC.cD.d参考答案:C28.如下图凸轮机构中,凸轮每2秒转动一圈,那么从动件的运动周期是?[2分]A.1sB.2sC.3sD.4s参考答案:B29.关于凸轮机构说法正确的是?[2分]A.发动机中用到了凸轮机构B.凸轮机构的从动件只能做摇摆运动C.凸轮机构不属于间歇运动机构D.凸轮机构中从动件的动作没有规律参考答案:A30.下列选项中,属于棘轮机构的是?[2分]A.aB.bC.cD.d参考答案:C二、多选题(共10题,每题2分,共20分)31.关于特殊机械结构说法正确是?[2分]A.凸轮机构可以将圆周运动转化为直线运动B.棘轮机构可以连续运动转化为间歇性运动C.曲柄摇杆机构可以将圆周运动转化为直线运动D.曲柄滑块机构可以将圆周运动转化为直线运动参考答案:ABD32.下图中,属于棘轮机构的有?[2分]A.aB.bC.cD.d参考答案:ABC33.皮带传动常用的方式有哪三种?[2分]A.平行传动B.交叉传动C.半交叉传动D.垂直传动参考答案:ABC34.下列选项中,属于间歇运动机构的是?[2分]A.槽轮机构B.凸轮机构C.棘轮机构D.滑轮组参考答案:ABC35.下列用品中,应用了曲柄摇杆机构的有?[2分]A.aB.bC.cD.d参考答案:BC36.如下图所示,自行车中,都包含了哪几种物理或机械原理?[2分]A.滑轮B.轮轴C.链传动D.凸轮参考答案:BC37.下列能将连续运动转化为间歇运动的有?[2分]A.凸轮机构B.槽轮机构C.不完全齿轮机构D.动滑轮参考答案:ABC38.凸轮机构按照从动件的形状分可以分为哪几种从动件?[2分]A.尖顶从动件B.直动从动件C.平底从动件D.滚子从动件参考答案:ABCD39.下列机构,属于平面四杆机构的是?[2分]A.曲柄摇杆机构B.反向双曲柄机构C.双曲柄机构D.双摇杆机构参考答案:ABCD40.机器人发展经历了哪三代?[2分]A.示教再现型机器人B.感知型机器人C.人形机器人D.智能机器人参考答案:ABD三、判断题(共10题,每题2分,共20分)41.摩擦力阻碍的是相对运动,所以物体受到的摩擦力的方向有时候和物体运动的方向相同。
02机器人技术等级考试四级Arduino智能小车前后左右综合实验程序代码C语言

02机器人技术等级考试四级Arduino智能小车前后左右综合实验程序代码C语言//============================机器人包老师=========================== // 智能小车前后左右综合实验//===============================================================int LH=7; //左电机后退int LQ=5; //左电机前进int RQ=6; // 右电机前进int RH=4; // 右电机后退void setup(){//初始化电机驱动IO为输出方式pinMode(LQOUTPUT); // (PWM)pinMode(LHOUTPUT); // (PWM)pinMode(RQOUTPUT);// (PWM)pinMode(RHOUTPUT);// (PWM)}void run(int time) // 前进{digitalWrite(RQHIGH); // 右电机前进digitalWrite(RHLOW);analogWrite(RQ100);//PWM比例0~255调速,左右轮差异略增减analogWrite(RH0);digitalWrite(LQHIGH); // 左电机前进digitalWrite(LHLOW);analogWrite(LQ100);//PWM比例0~255调速,左右轮差异略增减analogWrite(LH0);delay(time * 1000); //执行时间,可以调整}void brake(int time) //刹车,停车{digitalWrite(RQLOW);digitalWrite(RHLOW);digitalWrite(LQLOW);digitalWrite(LHLOW);delay(time * 1000);//执行时间,可以调整}void left(int time) //左转(左轮不动,右轮前进){digitalWrite(RQHIGH); // 右电机前进digitalWrite(RHLOW);analogWrite(RQ100);analogWrite(RH0);//PWM比例0~255调速digitalWrite(LQLOW); //左轮不动digitalWrite(LHLOW);analogWrite(LQ0);analogWrite(LH0);//PWM比例0~255调速delay(time * 1000); //执行时间,可以调整}void spin_left(int time) //左转(左轮后退,右轮前进) {digitalWrite(RQHIGH); // 右电机前进digitalWrite(RHLOW);analogWrite(RQ100);analogWrite(RH0);//PWM比例0~255调速digitalWrite(LQLOW); //左轮后退digitalWrite(LHHIGH);analogWrite(LQ0);analogWrite(LH100);//PWM比例0~255调速delay(time * 1000); //执行时间,可以调整}void right(int time) //右转(右轮不动,左轮前进){digitalWrite(RQLOW); //右电机不动digitalWrite(RHLOW);analogWrite(RQ0);analogWrite(RH0);//PWM比例0~255调速digitalWrite(LQHIGH);//左电机前进digitalWrite(LHLOW);analogWrite(LQ100);analogWrite(LH0);//PWM比例0~255调速delay(time * 1000); //执行时间,可以调整}void spin_right(int time) //右转(右轮后退,左轮前进)digitalWrite(RQLOW); //右电机后退digitalWrite(RHHIGH);analogWrite(RQ0);analogWrite(RH100);//PWM比例0~255调速 digitalWrite(LQHIGH);//左电机前进digitalWrite(LHLOW);analogWrite(LQ100);analogWrite(LH0);//PWM比例0~255调速 delay(time * 1000); //执行时间,可以调整}void back(int time) //后退{digitalWrite(RQLOW); //右轮后退digitalWrite(RHHIGH);analogWrite(RQ0);analogWrite(RH100);//PWM比例0~255调速 digitalWrite(LQLOW); //左轮后退digitalWrite(LHHIGH);analogWrite(LQ0);analogWrite(LH100);//PWM比例0~255调速 delay(time * 1000); //执行时间,可以调整}void loop(){delay(2000); //延时2s后启动back(1); //后退1sbrake(0.5);//停止0.5srun(1);//前进1sbrake(0.5);//停止0.5sleft(1);//向左转1sright(1);//向右转1sspin_right(2); //向右旋转2sspin_left(2);//向左旋转2sbrake(0.5);//停车}。
全国青少年机器人等级考试1-6级标准
第二部分全国青少年机器人技术等级考试 1-6级标准及1-2级内容解析一级标准科目:机器人搭建、机器人常用知识形式:机器人搭建采用实际操作的形式,机器人常用知识采用上机考试形式器材:结构件:能够满足考试要求的结构件均可考核内容:(一)实践1.基本结构认知2.知道六种简单机械原理(杠杆,轮轴,滑轮,斜面,楔,螺旋)3.齿轮和齿轮比4.传动链5.机器人常用底盘(二)知识1.了解主流的机器人影视作品及机器人形象2.会分辨稳定结构和不稳定结构3.会计算齿轮组的变速比例4.能够区分省力杠杆和费力杠杆5.能够区分那种滑轮会省力二级标准科目:机器人搭建、机器人常用知识形式:机器人搭建采用实际操作的形式,机器人常用知识采用上机考试形式器材:结构件:能够满足考试要求的结构件均可电子部分:包含可控制电源通断的电池盒及电机既可考核内容:(一)实践1.使用电池盒类型的遥控器控制电机运转2.能够连接独立的电池盒、开关以及电机3.完成凸轮、滑杆、棘轮、曲柄、连杆等特殊结构模型制作4.驱动电机完成一定任务(二)知识1.了解中国及世界机器人领域的重要历史事件2.知道机器人领域重要的科学家3.知道重要的机器人理论及相关人物4.知道凸轮、滑杆、棘轮、曲柄等特殊结构在生活中的应用三级标准科目:机器人搭建(任务式,编程语言和方式不限)、机器人常用知识、电子电路基础形式:机器人搭建和电子电路基础采用实际操作的形式,机器人常用知识采用上机考试形式器材及软件:结构件:能够满足考试要求的结构件均可核心控制板:开源硬件控制板,包含硬件的原理图、引导程序(如果含)、操作系统(如果含)、开源的开发环境及源码。
目前支持的控制板种类及型号,请至官方网站查询。
电子部分:与核心控制板配套的电子元件或模块开发软件:能够完成开源硬件控制板程序开发的免费软件即可。
目前支持的软件种类及版本,请至官方网站查询。
考核内容:(一)电子电路基础这部分实践操作主要在面包板上完成1.能够完成简单的串联、并联电路2.能够搭建简单的环境状态检测感应器3.能够通过可调电阻控制LED的亮度变化或控制电机速度变化(二)语言程序设计1.能够编写简单的顺序结构程序2.完成简单的选择结构程序(只有一个if或一个if/else)3.能够进行数学运算和比较4.能够简单应用图形化编程软件5.实现数字量输入、输出6.实现模拟量输入、输出(三)机器人搭建这部分实践操作主要是搭建能够完成指定任务的机构,与语言程序设计中的内容有部分交叉1.基本传感器应用2.能够进行数学运算和比较3.灵活应用控制器IO口实现数字量输出4.控制机器人平台移动5.实现简单的自律型机器人制作(比如简单避障、单线条巡线)6.能够编写简单的顺序结构程序7.完成简单的选择结构程序(只有一个if或一个if/else)(四)知识1.知道电力、电流、电压、电阻、导体、半导体等概念2.知道串联、并联的概念3.知道模拟量、数字量、IO口输入输出等概念4.了解自律型机器人的行动方式5.知道细分领域的机器人理论及相关人物6.知道LED这种半导体器件是单向导电的7、了解气动原理和相关器件四级标准科目:机器人搭建(任务式,编程语言和方式不限)、机器人常用知识形式:机器人搭建采用实际操作的形式,机器人常用知识采用上机考试形式器材及软件:结构件:能够满足考试要求的结构件均可核心控制板:开源硬件控制板,包含硬件的原理图、引导程序(如果含)、操作系统(如果含)、开源的开发环境及源码。
2023年9月全国青少年机器人技术等级考试六级实操题讲解

2023年9月全国青少年机器人技术等级考试六级实操题讲解嗨翻六级!2023年9月全国青少年机器人技术等级考试实操题深度解析嘿,小机友们,你们准备好了吗?咱们要一起穿越到那个科技炫酷、脑洞大开的未来世界——2023年9月的全国青少年机器人技术等级考试六级实操题现场!这场“战役”,不仅考验着大家对编程逻辑的理解力,还挑战着你们在机械构造与人工智能应用上的实战能力。
来吧,让我们一探究竟!首先,敲黑板!六级实操题目聚焦于机器人系统的集成设计与调试优化。
今年的考题设置了诸如“智能配送机器人路径规划”、“基于视觉识别的垃圾分类机器人设计”等前沿应用场景,让各位小小工程师们有机会亲手打造属于自己的"钢铁侠"。
哎呀,别眨眼哦!在“智能配送机器人路径规划”中,你需要灵活运用SLAM (Simultaneous Localization and Mapping)算法,让机器人在未知环境中自我定位并实时构建地图,规划出最优配送路线。
这就像指挥一场精密的室内导航行动,每一步决策都关乎任务的成功与否,你可得稳住心态,拿出看家本领!再来说说“基于视觉识别的垃圾分类机器人设计”。
这个环节就像是给机器人装上了“火眼金睛”,通过图像处理技术和深度学习算法,让机器人能自主识别各类垃圾,并进行精准分类投放。
这其中,如何调整参数以提升识别准确率,怎样优化机械臂动作使其更加流畅,都是你们需要攻克的硬核关卡。
当然,理论知识固然重要,但实践出真知,动手能力更是关键。
从电路搭建到代码编写,从硬件组装到软件测试,每个步骤都需要细心严谨,如同搭建一座智慧城堡,一块砖一片瓦都不能马虎。
在这场考试中,每一个螺丝钉的转动,每一行代码的敲击,都在积累你们向高级机器人技术进发的力量。
最后,别忘了团队协作的重要性。
面对复杂的实操题目,互相讨论、共同解决问题,能让你们在解决实际问题中体会团队精神的魅力。
毕竟,“三个臭皮匠,顶个诸葛亮”,齐心协力,定能攻无不克,战无不胜!总而言之,2023年9月的全国青少年机器人技术等级考试六级实操题是一次充满挑战又富有创新的科技之旅,它将检验和锻炼你们的技术实力与创新能力。
包老师的机器人技术等级考试四级课程:基础ArduinoC语言之关键字

机器人技术等级考试四级之基础Arduino语言之关键字:Arduino语言是建立在C/C++基础上的,其实也就是基础的C语言,Arduino语言只不过把AVR单片机(微控制器)相关的一些参数设置都函数化,不用我们去了解他的底层,让我们不了解AVR单片机(微控制器)的朋友也能轻松上手。
在与Arduino 学习爱好者接触的这段时间里,发现有些朋友对Arduino语言还是比较难入手,那么这里我就简单的注释一下Arduino语言。
基础C语言之关键字:if...else必须紧接着一个问题表示式(exxxxxpression),若这个表示式为真,紧连着表示式后的代码就会被执行。
若这个表示式为假,则执行紧接着else之后的代码. 只使用 if不搭配else是被允许的。
范例:if (val == 1) {digitalWrite(LEDHIGH);}for用来明定一段区域代码重复指行的次数。
范例:for (int i = 0; i < 10; i++) {Serial.print("ciao");}switch caseif叙述是程序里的分叉路口,switch case 是更多选项的路口。
Swith case 根据变量值让程序有更多的选择,比起一串冗长的if叙述,使用swith case可使程序代码看起来比较简洁。
范例 :switch (sensorValue) {case 23:digitalWrite(13HIGH);break;case 46:digitalWrite(12HIGH);break;default: // 以上条件都不符合时,预设执行的动作digitalWrite(12LOW);digitalWrite(13LOW);}while当while之后的条件成立时,执行括号内的程序代码。
范例 :// 当sensor值小于512,闪烁LED灯sensorValue = analogRead(1);while (sensorValue < 512) {digitalWrite(13HIGH);delay(100);digitalWrite(13HIGH);delay(100);sensorValue = analogRead(1);}do... while和while 相似,不同的是while前的那段程序代码会先被执行一次,不管特定的条件式为真或为假。
2020机器人技术等级考试四级课程02编程语言 机器人包老师

编程概要编程语言是数字开发世界中最重要的东西。
当今世界最重要的技能就是学会编写程序,几乎每个行业都涉及计算机,无论是飞机上自动驾驶仪器还是你手上戴着智能手表,各种形式的计算机围绕着我们,就连存储和访问信息,都需要计算机。
编程语言:scratch编程 Mixly编程编程语言:现在的编程语言多得数不过来,常用的有Java、C/C++、Python、PHP、Basic、Perl等等。
C语言编程汇编编程编程语言:Java编程 Python编程C语言◆编程王者,最早历史最悠久◆最为经典的计算机编程语言之一◆一种高效、好用的编程语言C语言是通用的基础编程语言,编程开发人员加班加点必备武器。
它的特点在于偏向计算机底层操作,多用于性能要求严格的领域。
C语言相对来说会难点,光一个指针就足以把你搞晕。
在硬件、虚拟现实VR/AR,C语言和C++占据主导地位。
C / C ++是编程的基础。
几乎所有的低级系统,例如操作系统,文件系统等,都是用C / C ++编写的。
C: 系统底层, 驱动, 嵌入式开发。
C++: 游戏开发, 大规模, 高性能, 分布式要求的程序开发。
P y t h o nPython:Python:Python:被称为胶水语言,哪里都可以用。
很多方便的库,丢弃c语言复杂指针,简化语法,它存在是解决问题,而不是让你理解语言本身。
ArduinoCArduino : Arduino 可以使用开发完成的电子元件例如Switch 或Sensors 或其他控制器、LED、步进电机或其他输出裝置。
Arduino 是一块基与开放原始代码的Simple i/o 平台,並且具有使用类似java,C 语言的开发环境。
让您可以快速使用Ardu 语言与Flash 或Processing…等软件,作出互动作品。
Arduino 开发IDE 界面基于开放原始码让您免费下载使用开发出更多令人惊奇的互动作品。
可简单地与传感器、各式各样的电子元件连接(如:红外线,超声波,热敏电阻,光敏电阻,伺服电机等);Arduino 以setup()开头,loop()作为主体的一个程序构架。
青少年机器人技术等级考试理论综合试卷六级20220912082421812

青少年机器人技术等级考试理论综合试卷(六级)分数:100.00题数:30一、单选题(共20题,共80分)1.下列有关SPI通信描述错误的是?()A、SPI是同步通信B、SPI是全双工通信C、SPI是串行通信D、SPI通信中,每个从设备有唯一地址题型:单选题答案:D难度:试题解析:2.MPU6050姿态传感器中,Accelerator传感器单元用于获取?()A、加速度原始数据B、角速度原始数据C、姿态角原始数据D、位移原始数据题型:单选题答案:A难度:试题解析:3.TCP/IP协议四层模型中,与最终用户直接接触的是?0A、网络接口层B、传输层C、网络层D、应用层题型:单选题答案:D难度:试题解析:4.关于12c串行通信,下列说法不正确的是?()A、12c总线上的器件有主设备和从设备之分B、启动数据传送由主设备发起C、终止数据传送由从设备发起D、12c通信中从设备都有一个唯一的地址题型:单选题答案:C难度:一般试题解析:5.MPU6050姿态传感器获取的原始数据,经过数据融合,获得传感器的姿态角,其中表示传感器上下角度变化和左右角度变化的姿态角分别是?()A、俯仰角滚转角B、偏航角俯仰角C、滚转角偏航角D、俯仰角偏航角题型:单选题答案:D难度:试题解析:6.客户端发送HTTP请求的方法中,用于向服务器发送索取数据请求的方法是?()A、GETB、PUTC、POSTD、PATCH题型:单选题答案:A难度:试题解析:7.下列程序通过WiFi类库提供的成员函数,将当前ESP32设置为AP,建立WiFi,程序中口所对应的成员函数是?0><«ue e MM•Imotcn>f•<I <113281,—,■i-CCW,—eec*M•9•>>«•9>n.ii ft MH•w■宣Rdl■内A、beginB、softAPC、connectD、softAPIP题型:单选题答案:B难度:一般试题解析:8.在TCP/IP通信中,率先发起通信请求的是?()A、主设备B、从设备C、服务器D、客户端题型:单选题答案:D难度:试题解析:9.HTML文档中,<head>标签的作用是?()A、标记网页的开始和结尾B、标记网页头部的开始和结尾C、标记网页主题的开始和结尾D、标记网页段落的开始和结尾题型:单选题答案:B难度:一般试题解析:10.I2C串行通信空闲时,下列有关SDA和SCL数据线的电平说法正确的是?()A、两者均为商电平B、两者均为低电平C、SDA为低电平,SCL为高电平D、SDA为高电平,SCL为低电平题型:单选题答案:A难度:一般试题解析:11.ESP32forArduino的12c类库的下列成员函数中,用于指定从设备地址,并将地址加入到发送数据队列的成员函数是?0A、Wire.begin()B、Wire.beginTransmission()C、Wire.endTransmission()D、Wire.requestFrom()题型:单选题答案:B难度:试题解析:12.IPv6的地址长度是IPv4地址长度的?()A、2倍B、4倍C、8倍D、16倍题型:单选题答案:B难度:一般试题解析:13.SPI通信中,有关MOSI数据线描述正确的是?()A、从机选择线B、串行时钟线C、用于从机向主机发送数据D、用于主机向从机发送数据题型:单选题答案:D难度:试题解析:14.下列命令中,可以用于查看当前计算机IP配置的命令是?()A、ipconfigB、msconfigC、pingD、Regedit题型:单选题答案:A难度:试题解析:15.步进电机类库AccelStepper的成员函数中,用于设定梯形加减速中恒定转速的成员函数是?()A、setMaxSpeed()B、setSpeed()C、runSpeed()D、setAcceleration()题型:单选题答案:A难度:试题解析:16.在浏览器中,输入如下数据,不能访问到网页的是?()A、域名B、IP地址C、统一资源定位符URLD、端口号题型:单选题答案:D难度:试题解析:17.PID控制中P控制是指?()A、比例控制B、积分控制C、微分控制D、开环控制题型:单选题答案:A难度:试题解析:18.I2C串行通信,下列关于SDA引脚说法正确的是?()A、SDA传送时钟信号B、SDA传送数据信号C、SDA可以同时双向传送D、SDA上的数据信号只能单向传送题型:单选题答案:B难度:试题解析:19.下列步进电机结构分类中,当前广泛使用的步进电机属于?()A、无刷式步进电机B、反应式步进电机C、永磁式步进电机D、混合式步进电机题型:单选题答案:D难度:一般试题解析:20.ESP32主控板和OLED1306通过I2C进行数据交互,ESP32主控板和OLED1306分别为? 0A、主设备从设备B、主设备主设备C、从设备从设备D、从设备主设备题型:单选题答案:A难度:试题解析:二、多选题(共5题,共10分)21.PID控制器常用的组合有?()A、PIB、PDC、PIDD、ID题型:多选题答案:A|B|C难度:试题解析:22.有关TCP/IP协议下列说法正确的是?()A、TCP/IP协议是一系列协议家族的统称B、TCP/IP协议包含了TCP协议和IP协议C、TCP/IP四层模型分别是:应用层、网络层、传输层、网络接口层D、TCP/IP协议当前Internet的基础协议题型:多选题答案:A|B|C|D难度:一般试题解析:23.关于步进电机,如下描述正确的是?()A、步进电机的角位移量和电脉冲数成正比B、通过改变电脉冲的频率,可实现步进电机速度的调节C、在不丢步的情况下,步进电机的误差不会长期累积D、步进电机可用于开环系统中作为执行元件题型:多选题答案:A|B|C|D难度:一般试题解析:24.ESP32主控板提供的WiFi工作模式有?()A、STAB、APC、STA+APD、Server题型:多选题答案:A|B|C难度:一般试题解析:25.SPI串行通信一般由如下数据线组成?()A、MOSIB、MISOC、SCLKD、SS题型:多选题答案:A|B|C|D难度:试题解析:三、判断题(共5题,共10分)26.通常情况下,Web服务的端口号是80。
机器人等级考试
机器人等级考试的发展趋势向更高层次和更广泛领域拓展
• 考试内容将更加丰富和全面
• 考试形式将更加多样化和智能化
机器人等级考试的发展趋势在于与国际接轨
• 与国际机器人等级考试制度进行交流和合作
• 提高我国机器主要内容与形式
机器人等级考试的考试科目与要求
• 考核学生的理论知识和实践能力
⌛️
机器人等级考试的目的是选拔和培养人才
• 为机器人领域输送具有专业技能的人才
• 提高学生的创新能力和团队协作能力
机器人等级考试的目的与意义
机器人等级考试的目的在于评估学生的技术水平
• 为学生提供展示自己能力的平台
• 为用人单位提供选拔人才的依据
机器人等级考试的意义在于推动机器人技术的发展
03
机器人等级考试的备考策略与方法
制定科学的备考计划与时间安排
制定备考计划时要充分考虑自己的实际情况
• 分析自己的优势和劣势,确定备考重点
• 制定合理的学习计划和进度安排
合理安排备考时间,保证学习效果
• 合理安排学习时间,避免临时抱佛脚
• 保证充足的休息时间,避免学习疲劳
提高机器人相关知识水平与实践能力
• 阅读经验分享文章,了解备考方法和技巧
• 与其他考生交流,分享备考经验和心得
05
机器人等级考试的真实案例分析与实践
机器人等级考试的顺利通过案例分享
分享顺利通过机器人等级考试的经验和教训
• 分析自己在备考过程中的优势和劣势
• 总结备考过程中的成功经验和教训
为其他考生提供借鉴和参考,提高备考效果
• 学习成功案例中的备考方法和技巧
提供机器人等级考试的备考建议,帮助考生提高备考效果
• 合理安排备考时间,保证学习效果
全国青少年机器人技术等级考试卷(二级)xxxxxxxx

全国青少年机器人技术等级考试卷(二级)xxxxxxxxxxxxxxxx全国青少年机器人技术等级考试试卷(二级)试卷编号:试卷录入者:机器人包老师试卷总分:100出卷时间:2018-12-25 13:17答题时间:30分钟分数:100题数:45一、单选题(共30题,每题2分,共60分)1.链传动相比齿轮传动的优点是?[2分]A.更适合远距离传动B.轮转速更快C.动力更大D.链轮安装可以不在同一平面内参考答案:A2.XXX发明了一种运送军粮的机器人称为?[2分]A.木牛流马B.指南车C.记里鼓车D.运粮车参考答案:A3.一辆六轮车,左侧三个轮转速100rpm,右侧三个轮转速200rpm则此车会?[2分]A.向前直走B.向前走并向左转C.向后退D.原地不动参考答案:B4.以下关于前轮驱动和后轮驱动说法正确的是?[2分]专业资料精心整理A.前轮驱动因省去了通今后轮的驱动轴和后差动器等零件,内部空间更大B.前轮驱动简单转向过度,后轮驱动转向缺乏C.前轮驱动零件更多,重量更大D.前轮驱动零件多成本更高参考答案:A5.关于电动机的能量转化说法正确的是?[2分]A.机械能转化为电能B.电能转化为机械能C.动能转化为势能D.势能转化为动能参考答案:B6.如图,曲柄滑块机构中曲柄做的是甚么活动?A.摇摆活动B.左右移动C.等速回转D.无规律运动参考答案:C7.如图,该机构为?2分]A.棘轮机构B.槽轮机构C.不完全齿轮机构D.凸轮机构2分]专业资料精心整理参考答案:B8.如图,一个大齿轮带动一个小齿轮,下列正确的是?A.作用是加速B.作用是减速C.两轮的旋转方向相同2分]D.两个齿轮的轮齿外形大小可以不一样参考答案:A9.下列图片是棘轮的是?A.aB.bC.cD.d参考答案:B10.以下最得当制造公转自转模型的机器结构是?[2分]A.行星齿轮B.连杆C.曲柄摇杆D.曲柄滑块参考答案:A2分]专业资料精心整理11.如图,以下齿轮属于平齿轮的是?A.aB.bC.cD.d参考答案:A12.以下哪一项是皮带传动的优点?[2分]A.结构简单,适用于两轴中心距较大的传动场合B.使用寿命短C.传动效率慢D.传动平稳,噪声大参考答案:A13.如图,下列不是间歇活动机构的是?[2分]A.aB.bC.cD.d参考答案:C14.关于皮带传动说法毛病的是?[2分]A.皮带轮旋转偏向可能相同专业资料精心整理2分]。
青少年机器人技术等级考试六级实操试卷及评分标准
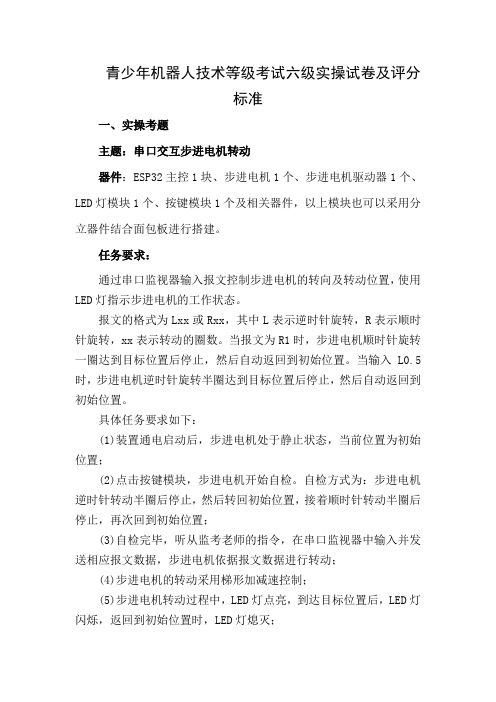
青少年机器人技术等级考试六级实操试卷及评分标准一、实操考题主题:串口交互步进电机转动器件:ESP32主控1块、步进电机1个、步进电机驱动器1个、LED灯模块1个、按键模块1个及相关器件,以上模块也可以采用分立器件结合面包板进行搭建。
任务要求:通过串口监视器输入报文控制步进电机的转向及转动位置,使用LED灯指示步进电机的工作状态。
报文的格式为Lxx或Rxx,其中L表示逆时针旋转,R表示顺时针旋转,xx表示转动的圈数。
当报文为R1时,步进电机顺时针旋转一圈达到目标位置后停止,然后自动返回到初始位置。
当输入L0.5时,步进电机逆时针旋转半圈达到目标位置后停止,然后自动返回到初始位置。
具体任务要求如下:(1)装置通电启动后,步进电机处于静止状态,当前位置为初始位置;(2)点击按键模块,步进电机开始自检。
自检方式为:步进电机逆时针转动半圈后停止,然后转回初始位置,接着顺时针转动半圈后停止,再次回到初始位置;(3)自检完毕,听从监考老师的指令,在串口监视器中输入并发送相应报文数据,步进电机依据报文数据进行转动;(4)步进电机的转动采用梯形加减速控制;(5)步进电机转动过程中,LED灯点亮,到达目标位置后,LED灯闪烁,返回到初始位置时,LED灯熄灭;(6)程序采用Arduino C/C++代码编写;(7)未作规定处可自行处理,无明显与事实违背即可。
说明:请考生在考试结束前,按照如下要求提交相关文件。
(1)将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS6_身份证号,大小5M以下;(2)将程序文件通过“上传附件”按钮进行上传;(3)程序编写过程中不得打开其它示例程序,如发现,实操成绩按照0分处理。
二、评分组成(共100分)1、电路搭设(20分)元器件:(1)按键模块;(2分)(2)LED灯模块;(2分)(3)步进电机驱动器;(2分)(4)步进电机;(2分)电路搭设:(5)按键模块和主控板正确连接;(3分)(6)LED灯模块和主控板正确连接;(3分)(7)步进电机驱动器和主控板正确连接;(3分)(8)步进电机和步进电机驱动器正确连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MPU6050姿态都集成了哪些传感器?MPU6050 返回的姿态角包含什么?
如何使用库函数?
通过 MPU6050 获得姿态角
本章目录
I2C基础 姿态传感 液晶显示 SPI基础
液晶显示
液晶显示器是一种借助于薄膜晶体管(TFT)驱动的有源矩阵液晶显示器,它主要是以电流刺激液晶分子产生点、线、面配合背部灯管构成画面。
IPS、TFT、SLCD都属于LCD的子类。
液晶显示器的工作原理是:在电场的作用下,利用液晶分子的排列方向发生变化,使外光源透光率改变(调制),完成电一光变换,再利用R、G、B三基色信号的不同激励,通过红、绿、蓝三基色滤光膜,完成时域和空间域的彩色重显。
液晶显示器简介
LCD( Liquid Crystal Display)
对于许多的用户而言可能是一个并不算新鲜的名词了,不过这种技术存在的历史可能远远超过了我们的想像。
早在19世纪末,奥地利植物学家就发现了液晶,即液态的晶体,也就是说一种物质同时具备了液体的流动性和类似晶体的某种排列特性。
液晶显示器简介在电场的作用下,液晶分子的排列会产生变化,从而影响到它的光学性质,这种现象叫做电光效应。
利用液晶的电光效应,英国科学家在上世纪制造了第一块液晶显示器即LCD。
世界上第一台液晶显示设备出现20世纪70年代初,被称之为TN-LCD
(扭曲向列)液晶显示器。
尽管是单色显示,它仍被推广到了电子表、计算器等领域。
O L E D简介
OLED简介:OLED显示屏是利用有机电自发光二极管制成的显示屏。
具备自发光有机电激发光二极管,不需背光源、对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广、构造及制程较简单等优异之特性,被认为是下一代的平面显示器新兴应用技术。
中国OLED产业前景广阔,业内企业努力积累发展经验,但国内产业链上游环节薄弱,行业的配套能力欠缺等因素为广大厂商制造了比较大的发展障碍。
显示屏的基本参数如下:
尺寸: 0.96英寸
分辨率:128*64
颜色:单色
驱动芯片: SSD1306
通信方式: I2C
I2C地址: 0x3C (默认) 0x3D 可选
SS 1306
SS1306 OLED液晶显示屏相关的库很多,Adafruit提供Adafruit_SSD 1306库。
该库提供了丰富的图形功能。
下载链接为: https://lexus2k/ssd1306
/h-nd-288.html
该库具有如下功能:
占用较小的系统内存资源。
图像功能:画线、矩形、点、图片显示等功能
完整的字符显示支持,多种大小及字体文字显示
菜单功能
控制台输出
丰富的示例程序
文字显示:
ssd1306_ 128x64 i2c_init() ;功能:初始化SD1306显示屏。
默认的地址为0x3C,如果地址采用0x3D,需要修改库文件。
ssd1306 fillScreen (fill Data);功能:以fill _Data 指定的模式填充屏幕。
参数: fill_Data, byte类型,填充屏幕的数据表述。
0x00,清屏,整个屏幕熄灭: 0xff,整个屏幕点亮; 0b10101010,整个屏幕隔行点亮。
文字显示:
ssd1306_ setFixedFont(font) ;
功能: 设置显示的文字字体。
参数: font,字体名。
ssd1306库有ssd1306xled font6x8、ssd1306xled font5x7两种字体可用。
文字显示: ssd1306 printFixed(x,y, string,style) ; 功能:在屏幕上指定位置显示文字。
参数:x,显示文字的水平方向像素点的坐标。
y,显示文字的系直方向像素点的坐标, y必须是8的倍数,例如: 0,8,16,24,32。
如果指定的坐标为[10,18],程序会在(10,16]位置输出。
string,输出的内容,不可以是汉字。
style文字样式,有三种选择。
STYLE _NORMAL(正常) , STYLE_BOLD (加粗) ,STYLE_ITALIC (斜体)。
文字显示:
ssd1306 printFixedN(x ,y,string,style ,factor) ;
功能:在屏幕上指定位置显示放大factor数值倍数后的文字。
参数:其它参数同ssd1306_ printFixed()。
factor,放大倍数,有4个选项共选择: FONT SIZE NORMAL (正常),FONT SIZE 2X (2倍),FONT SIZE 4X(4倍),FONT SIZE _8X (8倍)。
本小节内容复习:5-6级教材P126-P128 本小节作业思考:5-6级教材P142题10-11。