de1000VFD
台达变频器参数表vfd01

台达变频器参数表vfd01台达变频器参数表vfd01常用参数:一:与参数相关功能键:PROG/DATA键用于读取驱动器各项参数,待机状态下按一次该键进入菜单组选择界面,共分为12个菜单组(分别是00:用户参数、01:基本参数、02:操作方式参数、03/04:输出/输入功能参数、05:多段速及自动程序运转参数、06:保护参数、07:电机参数、08:特殊参数、09:通讯参数、10:回授控制参数、11:多组电机控制参数),再按上下加减键可选择要修改的菜单组,然后再按一次PROG/DATA键即进入到相应子菜单参数界面,再按该键可显示该参数值,修改值后同样按该键可进行参数保存,最后按MODE 键两次可返回到待机界面。
二:控制回路端子功能:24v:SRC灌电流内部电源模式时作正电源用。
FWD/REV-DCM:正/反转。
EF-DCM:外部异常输入。
MI1~MI8-DCM:多功能输入1~8。
DCM:SNk拉电流内部电源模式时作公共端子用。
+10V:速度设定用电源。
AVI:模拟电压(0~10V)输入。
ACI1/ACI2:模拟电流输入(4~20mA)。
ACM:模拟控制信号共同端。
RA1/RB1-RC1:多功能输出继电器1接点。
RA2/RB2-RC2:多功能输出继电器2接点。
AFM1-ACM:多功能模拟输出选择1(0~10V)。
AFM2-ACM:多功能模拟输出选择2(0/4~20mA)。
三:常用参数:00用户参数:*1*00-03/04:设定/输出频率。
(只读)*2*00-05:输出电流。
(只读)*3*00-07/09:输出电压/功率。
(只读)01基本参数组:*1*01-00:最高操作频率。
*2*01-01:最大电压频率。
*3*01-03:中间电压频率。
*4*01-04:中间输出电压。
*5*01-05/06:最低输岀频率/电压。
*6*01-07/08:上/下限频率。
*7*01-09/10:第一加/减速时间。
*8*01-11/12:第二加/减速时间。
DediProg 1.0 专用编程器指南说明书
Table of ContentsI.Introduction (3)II.Conditions and Limitations (3)III.How to start (3)mand List (4)V.Revision History (6)Important notice:This document is provided as a guideline and must not be disclosed without consent of DediProg. However, no responsibility is assumed for errors that might appear.DediProg reserves the right to make any changes to the product and/or the specification at any time without notice. No part of this document may be copied or reproduced in any form or by any means without prior written consent of DediProg.--device arg (Work with all Basic Switches)- 1: Activate only the programmer connected to USB1- n: Activate only the programmer connected to USBnNote: If '--device' is not used, the command will be executed on allconnected programmer.--fix-device arg Fix programmer serial number with programmer sequence.- Instructions must be enclosed in double quotation marks("")Example:dwcmd --fix-device "1 SPU000001"--list-device-id arg - 0 : List all programmers’ ID from USB1 to USBn (Default)Note: The sequence is assigned by OS during USB plug-in.- 1: Prompt the device ID of programmer connected to USB1.- n: Prompt the device ID of programmer connected to USBn. Miscellaneous options:-t [ --timeout ] arg (=600) Timeout value in seconds-i [ --silent ] Suppress the display of real-time timer counting- Used when integrating with 3rd-party tools(e.g. IDE)--log arg Write operation result into a file(Default is located underC:\DediLog\dwcmd-xxxxx.log)Example:dwcmd --usb-prj d:\test.dprj --log d:\result.txtNote:Windows Command Line does not support ProgMaster series.Usage Examples:1. dwcmd -d file.dprj -rDownload project file to StarProg and run it.2. dwcmd -rRun project from the StarProg embedded SD card.3. dwcmd --usb-prj file.dprjExecute project file via USB.4. dwcmd --usb-prj file.dprj --device 1Execute Programmer 1 project file.5. dwcmd -d file.dprj --device 1Download project file to programmer 16. dwcmd -r --device 1Execute project file7. dwcmd -d file.dprj -r --device 2Download project file to StarProg and run the project file on programmer 2.8. dwcmd -d file.dprj -r --log d:\result.txtDownload project file to StarProg and save the operation result to d:\result.txt.V.Revision HistoryDate Version Changes05/11/2016 1.0 Initial releaseDediProg Technology Co., Ltd- Taiwan Headquarter TEL: 886-2-2790-7932FAX: 886-2-2790-79164F., No.7, Ln. 143, Xinming Rd., Neihu Dist., Taipei City 114, Taiwan- Shanghai Office TEL: 86-21-5160-0157 FAX: 86-21-6126-3530Room 503, Block E, No.1618, Yishan Road, Shanghai, ChinaTechnical Support:support@Sales Support:sales@Information furnished is believed to be accurate and reliable. However, DediProg assumes no responsibility for the consequences of use of such information or for any infringement of patents or other rights of third parties which may result from its use. Specifications mentioned in this publication are subject to change without notice.This publication supersedes and replaces all information previously supplied.All rights reservedPrinted in Taiwan.。
贴片F系列三极管参数

Base I I N C N N X K N N D N N N N N B N N N N N N N N X N N N N N N N N N N N B P X P ZB X ZB
Package SCD80 URD SOT323 SOT23 SC59 SC59 SOT23 SOT23 SOT23 SOT23 SOT23 SOT23 SOT23 SOT23 SOT23 SOT323 SC59 SC59 SOT23 SC59 SC59 SC59 SC59 SOT23 SC59 SC59 SOT23 SC59 SC59 SC59 SC59 SC59 SOT23 SOT89 SOT89 SOT23 SOT23
Leaded Equivalent/Data uhf varicap 2.5-22pf npn RF fT 8GHz 35V RF pin sw diode npn dtr R1 2k2 40V 100mA npn dtr R1 4k7 40V 100mA fT 12GHz npn RF 4V 12mA 35V RF pin sw diode BF495 RF npn fT 150MHz hfe30-60 dual series HP3820 pin sw diode BF184 BF494 BF184 BF494 BF184 BF494 RF npn fT150MHz hfe60-120 BF495 dual cc HP3820 pin sw diode BF184 BF494 pnp dtr 1k + 1k 50V 500mA pnp dtr 2k2 + 2k2 50V 500mA pnp dtr 4k7+ 4k7 50V 500mA pnp dtr 4k7+ 4k7 50V 500mA pnp dtr 10k + 10k 50V 500mA fT 12GHz npn 6V 20mA npn dtr 1k + 1k 50V 500mA npn dtr 2k2 + 2k2 50V 500mA npn dtr 4k7 + 4k7 50V 500mA npn dtr 4k7 + 4k7 50V 500mA npn dtr 10k + 10k 50V 500mA pnp dtr 2k2 + 10k 50V 100mA pnp dtr 2k2 + 10k 50V 100mA npn dtr 2k2 + 10k 50V 100mA pnp dtr R1 2k2 40V 100mA pnp dtr R1 4k7 40V 100mA pnp dtr R110k 40V 100mA 0.5-3GHz cc pin dual anode npn RF 1.5GHz 300mA BFQ69 npn RF Ft 5.5GHz 100mA microproc -ve reset gen 2.700V BFW92 microproc -ve reset gen 2.800V
台达MVD1000系列中压变频器-DeltaElectronics

台達電子MVD1000系列中壓變頻器是一款應用於通用電機控 制、產品集成度高且性能優越的變頻裝置。中壓變頻器能夠為 相關系統的風機、泵類、壓縮機等負載提供卓越的調速運行控 制,從而為用戶提高生產效率,節能降耗, 延長設備壽命。 台達電子一直致力於在中壓變頻器領域為用戶提供高效率、高 可靠性的能源節能解決方案,協助用戶實現可持續發展。
台達打造 2009 年世運主場館太陽能電力系統
台達電子集團
台達集團由鄭崇華先生創立於1971年,為全球電源管理與散熱解決方案的領導廠商。面對日 益嚴重的氣候變遷,台達長期關注環境議題,秉持「環保節能 愛地球」的經營使命,持續開 發創新節能產品及解決方案、不斷戮力提升產品的能源轉換效率,以減輕全球暖化對人類生 存的衝擊。近年來,台達集團已逐步從關鍵零組件製造商邁入整體節能解決方案提供者,深 耕「電源及零組件」、「能源管理」與「智能綠生活」三大業務範疇。
完善的保護措施 • 過流保護 • 過載保護 • 變壓器過溫報警/超溫保護 • 變頻器過熱保護 • 欠壓,過壓保護 • 電機過載保護(外接) • 散熱風機異常報警 • 機櫃門打開保護 • 風壓報警 • 輸出短路保護 • 輸入/輸出缺相保護 • 通訊故障保護 • 輸出接地保護
控制和監控功能 • 頻率命令(Hz) • 運行頻率(Hz) • 輸入 / 輸出功率,電流,電壓 • 累計執行時間 • 變頻器狀態 • 系統旁路開關和使用者斷路器狀態 • 可設定的輸入/輸出類比量 • 故障報警 • 故障診斷功能 • 飛車啟動,失電跨越功能
面對全球 化與氣候變遷的危機,台達將持續投入產品研發與技術創新,提供高效率且可靠的 節能整合方案與服務,為人類永續生存發展盡一份力量。更多詳情請參見: www.deltaww. com.
為什麼選用變頻器
三汇示波器说明书(Ver1.0)
DST4000 和 DST1000 系列数字存储示波器用户手册
i
目录
5.1 显示区 ........................................................................................ 20 5.2 信息区域..................................................................................... 23 5.3 波形显示..................................................................................... 23
三汇系列产品
DST4000 和 DST1000 系列 数字存储示波器
Version 1.0
杭州三汇科技有限公司 www.
目录
目录
目 录 ...........................................................................................................i 版权申明 .......................................................................................................................................................................v 第 1 章 安全事项......................................................................................... 1
AELTA VFD-F 说明书

055: 7.5HP(5.5kW) 370: 50HP(37kW) 1600: 215HP(160kW)
產品系列
075: 10 HP(7.5kW) 450: 60HP(45kW) 1850: 250HP(185kW) 110: 15 HP(11kW) 550: 75HP(55kW) 2200: 300HP(220kW)
2-5
北京微度科技发展有限公司 /
框號 G
VFD-F 系列
W W1
D D1 S3
H1 H H2
F H U
VFD-PU01
RUN STOP JOG FWD REV
JOG RUN
MODE
PROG DATA
STOP RESET
S4 D2 S1
S2
UNIT: mm [inch] 框號 W W1 H H1 H2 D D1 D2 S1 S2 S3 S4
OUTPUT : 3PH 0-480V 13A 9.9kVA 7.5HP
Freq. Range : 1.5~120Hz
ENCLOSURE: TYPE 1
055F43A0T2010001
型號說明
VFD 055 F 43 A
版本 輸入電壓
VFD-F 系列
最大適用電機 007: 1.0HP(0.75kW) 150: 20HP(15kW) 750: 100HP(75kW)
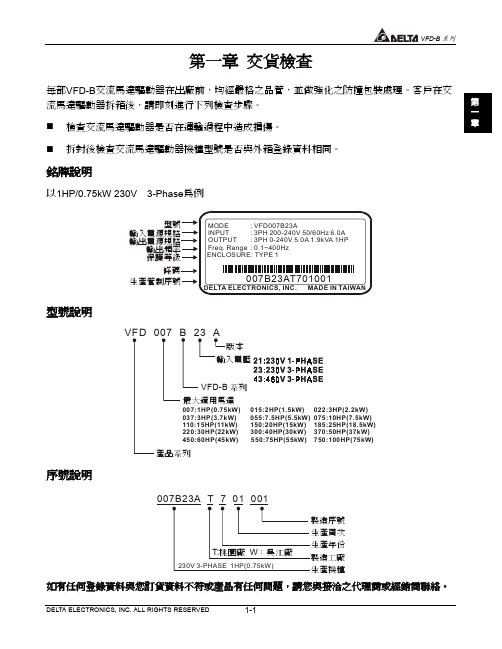
第
一
檢查交流電機驅動器是否在運輸過程中造成損傷。
章
拆封后檢查交流電機驅動器機種型號是否與外箱登錄資料相同。
銘牌說明
以7.5HP/5.5kW 460V 3-Phase為例
型號 輸入電源規格 輸出電源規格
輸出頻率 保護等級
條碼 生產管制序號
DEC-1000和DEC-4000控制器操作说明书讲述
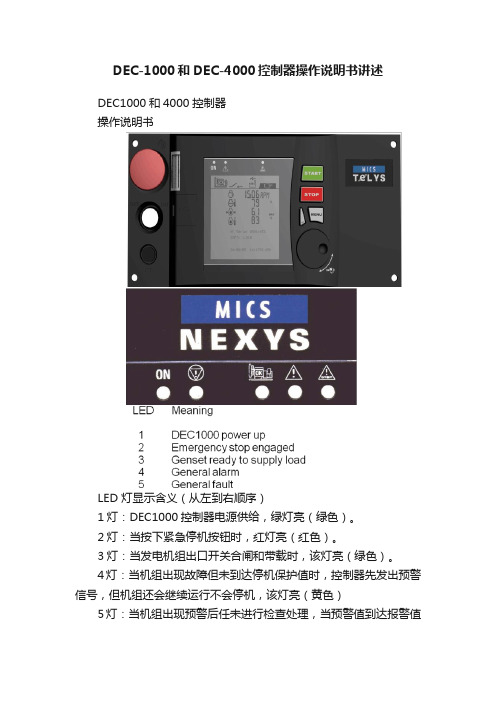
DEC-1000和DEC-4000控制器操作说明书讲述DEC1000和4000控制器操作说明书LED 灯显示含义(从左到右顺序)1灯:DEC1000控制器电源供给,绿灯亮(绿色)。
2灯:当按下紧急停机按钮时,红灯亮(红色)。
3灯:当发电机组出口开关合闸和带载时,该灯亮(绿色)。
4灯:当机组出现故障但未到达停机保护值时,控制器先发出预警信号,但机组还会继续运行不会停机,该灯亮(黄色)5灯:当机组出现预警后任未进行检查处理,当预警值到达报警值时,机组立即自动停止运行进行保护,该灯亮(红色)当机组运行时,RPM:显示机组运转的速度(1500转/分);同时显示机组运行时,充电机输出电压值:13.6V(直流)。
显示:控制器运行累计时间:23589小时;显示:发电机组输出电源频率:50Hz;显示:电池电压13.6V显示:柴油量在油箱的百分比值:37%显示:冷却液温度:85℃(水温)显示:机组运行中机油压力:3.2BAR以上为公制单位显示:柴油量在油箱的百分比值:37%显示:冷却液温度:85F(水温)显示:机组运行中机油压力:40-60PSI以上为英制单位显示:L1-L2相电压:404V;显示:L2-L3相电压:403V;显示:L3-L1相电压:401V显示:L1-N线电压233V;显示:L2-N线电压233V;显示:L3-N线电压232V.显示:L1相电流530A显示:L2相电流537A显示:L3线电流548A机侧启动1、将控制器上钥匙开关从左侧向右侧旋转,打开控制器电源,控制指示灯亮及液晶屏出现文字显示,控制器并读取程序;2、控制器绿色灯亮,说明机组无故障,准备就绪;3、按下“START”绿色按钮,机组立即进行预热10秒,10秒后机组立即启动,机组启动成功允许;4、读取机组允许参数:按下“左侧白色按钮”,每按一次,显示一组参数,其中参数包括:发动机转速、水温、机油压力、3相电压及频率、3相电流、电池电压等;5、按下“STOP”按钮,机组立即停止运转。
台达vfd-b变频器说明书
280.0 [11.02]
21.0[0.83]
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
2-11
13.0[0.51]
VFD-B րЕ
數位操作器VFD-PU01機構尺寸
118.0 [4.65] 108.0 [4.25]
5.5[0.22]
VFD-B րЕ
Unit: mm (inches)
160.0 [6.30] ௐ ˟ ౢ
173.0 [6.81] 185.0 [7.28]
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
2-3
R2.75[0.11] 5.5[0.22]
173.0 [6.81] 185.0 [7.28]
R2.75[0.11] 5.5[0.22]
2-2
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
VFD007B21A VFD015B21A VFD015B23A VFD015B43A
0.75 kW (1HP) 230V / 1-phase 1.50 kW (2HP) 230V / 1-phase 1.50 kW (2HP) 230V / 3-phase 1.50 kW (2HP) 460V / 3-phase
150mm
冷空氣
安裝環境
▲ 無水滴、蒸氣、灰塵及油性灰塵之場所。 ▲ 無腐蝕、易燃性之氣、液體。 ▲ 無漂浮性的塵埃及金屬微粒。. ▲ 堅固無振動之場所。 ▲ 無電磁雜訊干擾之場所。 ▲ 使用環境溫度為-10℃〜40℃。若環境溫度超過 40℃以㆖時,請置於通風良好之場所。
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
AELTA VFD-DD 说明书

''6序言韧体版本1.07感谢您采用台达同步门机交流马达驱动器VFD-DD系列。
VFD-DD系采用高质量之组件、材料及融合最新的微电脑控制技术制造而成。
此产品说明提供给使用者安装、参数设定、异常诊断、排除及日常维护交流马达驱动器相关注意事项。
为了确保能够正确地安装及操作交流马达驱动器,请在装机之前,详细阅读本产品说明,并请妥善保存随机附赠之光盘内容及交由该机器的使用者。
交流马达驱动器乃精密的电力电子产品,为了操作者及机械设备的安全,请务必交由专业的电机工程人员安装试车及调整参数,本产品说明中有 [ 危险 ] 、 [ 注意 ] 等符号说明的地方请务必仔细研读,若有任何疑虑的地方请连络本公司各地的代理商洽询,我们的专业人员会乐于为您服务。
以下各事项请使用者在操作本产品时特别留意本说明书中为了详尽解说产品细部,会将外壳拿开或将安全遮盖物拆解后,以图文方式作为描述。
至于本产品在运转中,务必依照规定装好外壳及配线正确,参照说明书操作运行,确保安全。
说明书内文的图标,为了方便说明事例,会与拿到产品稍有不同,但不会影响客户权益。
由于产品精益求精,当内容规格有所修正时,请洽询代理商或至台达网站( /industrialautomation/ )下载最新版本。
交流马达驱动器有时会简称为变频器或是驱动器,若内文叙述有提及变频器一词,便是指交流马达驱动器。
目录一、使用及安装1-1 产品外观………………………………………………………………………………………………1-2 1-2 产品安装………………………………………………………………………………………………1-5 1-3 产品尺寸……………………………………………………………………………………...…..….1-6二、配线2-1 配线说明………………………………………………………………………………………………2-2 2-2 主回路端子说明………………………………………………………………………………………2-5 2-3 控制回路端子说明………………………………………………………………………………..…..2-6三、简易面板与运转3-1 运转方式……………………………………………………………………………………………..3-2 3-2 试运转…………………………………………………………………………………………………3-3四、参数功能说明4-1参数功能一览表…………………………………………………………………………………..……4-200 系统参数…………………………………………………………………………………..…..….4-201 电机参数…………………………………………………………………………………..………4-402输出/入功能参数…………….…………..…………………………………………………..……4-603 回授参数………………………………………………………………………………………..…4-804 开门动作参数……..………………………………………………………………………….…4-905 关门动作参数………………………………………………………………………………….4-1006 保护及特殊功能参数………………………………………………………………………….4-1107 控制参数……………………………………………………………………………………..….4-1308 多段速参数………………………………………………………………………………..….…4-1409 通讯参数…………………………………………………………………………………..….....4-1510 用户自定参数设定………………………………………………………………………..….....4-1611 查阅用户参数设定………………………………………………………………………..….....4-174-2 参数功能详细说明…………………………………………………………………………………..4-1800 系统参数………………………………………………………………………………………...4-1801 电机参数………………………………………………………………………………………...4-2302输出/入功能参数…………………………..…………………………………………………….4-2903 回授参数…………….……………………...…………………………………………………...4-3404 开门动作参数………………………………………………………………………………..4-3705 关门动作参数…………………………………………………………………………………...4-4006 保护及特殊功能参数………………………………………………………………….………..4-4407 控制参数………………………………………………………………………………………...4-4908 多段速参数……………………………………………………………………………………...4-5109 通讯参数…………………………………………………………………………………….…..4-5210 用户自定参数设定………………………………………………………………………..….....4-6011 查阅用户参数设定………………………………………………………………………..….....4-65五、异常诊断方式5-1 过电流OC…………………………………………………………………………………………..…5-2 5-2 对地短路故障GFF……………………………………………………………………………………5-3 5-3 过电压OV……………………………………………………………………………………………..5-4 5-4 电压不足Lv……………………………………………………………………………………………5-5 5-5 过热OH1……….……………………………………………………………………………………..5-6 5-6 过载OL………………………………………………………………………………………………..5-7 5-7 数字操作器异常………………………………………………………………………….………….5-8 5-8 电源欠相PHL…………………………………………………………………………………………5-9 5-9 马达无法运转………………………………………………………………………………………5-10 5-10 马达速度无法变更…………………………………………………………………………………5-11 5-11 马达失速………………………………………………………………………………………….5-12 5-12 马达异常……………………………………………………………………………………………5-13 5-13 电磁杂音、感应杂音之对策……………………………………………………………………….5-14 5-14 设置的环境措施……………………………………………………………………………………5-15 5-15 防止交流马达驱动器影响其它机器………………………………………………………………5-16六、保护及检查6-1 保护动作一览表………………………………………………………………………………………6-2 6-2 定期维护检查………………………………………………………………………………………6-11附录A 标准规格……………………………………………………………………………………………..…A-1附录 B 选择合适的交流马达驱动器B-1交流马达驱动器容量计算方式………………………………………………………………………B-2 B-2 选用交流马达驱动器注意事项……………………………………………………………………...B-4 B-3 马达选用……………………………………………………………………………………………...B-5一、使用及安装1-1一、使用及安装1-1 产品外观1-2 产品安装1-3 产品尺寸客户收到本产品时必须置于其包装箱内。
上海熊猫无负压官网叠压供水设备方案报价文件之欧阳德创编
欧阳德创编 2021.03.07设备配置及报价上海熊猫机械(集团)有限公司综合说明本报价文件是根据贵方提供的招标文件及技术参数进行制作的,完全满足现场供水的各项要求。
我们将以极大的诚意,力争获取对贵工程的产品供货权。
我公司既追求合理的利润,又面对现实争取市场,二者之间我们将采用最灵活的态度去努力争取。
我们非常希望能获得充分的机会与贵单位就技术和商务方面问题作进一步的探讨和协商。
在此特别说明如下几点:1. 材质说明:为立式多级离心泵,采用德国博格曼进口机械密封,摩擦小、无泄露、使用寿命长;采用瑞典SKF进口静音轴承,选用了特殊的定位结构和加工工艺,运行噪音大大降低。
叶轮、导叶、采用不锈钢材质,重量轻、冲压激光焊接,焊接牢固、过流部分光滑保证了(低摩擦、效率高、低阻力、低损耗)外形美观。
由于叶轮、导叶、套桶、外壳、泵轴采用不锈钢材质大大减少了泵体重量。
整个系统采用食品级不锈钢材欧阳德创编 2021.03.07质,如不锈钢无负压稳流补偿系统、不锈钢管路、不锈钢截止阀、不锈钢静音止回阀、不锈钢成套附件等。
小流量保压系统采用意大利进口,保证了供水管网压力恒定。
2. 产品特点:1) 环保方面:市政自来水全封闭连接,直接供到用户。
水源无污染,保证水质质量好。
2) 节水方面:无负压供水设备是全封闭,无水箱的耗费现象。
3) 节能方面:与市政管网直接串接,充份利用自来水原有的压力,供水设备大部分时间在低频率下运行,耗电量小,综合节能可达30%-70%。
4) 安装方面:成套设备无须修建蓄水池,设备直接与市政管网和用户用水管网对接,即可实现自动供水,安装便捷。
5) 投资方面:充分利用自来水管网的压力,能耗小,节省日常开支,节省定期清洗消毒等费用,综合节约投资可达30%~60%。
3. 运输方式及交货:1) 运输方式:汽运。
2) 运输保险费已包含在运输费中。
3) 出厂发货前7天通知贵方。
4) 交货地点:按合同规定。
欧阳德创编 2021.03.075) 交货周期:根据用户要求。
台达变频器参数及故障代码
参数组
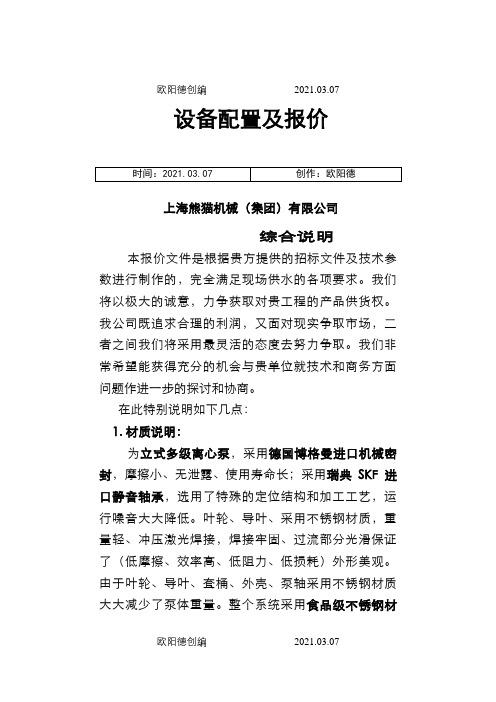
VFD-F 变频器参数明细
参数功能 设定频率 输出频率 输出电流 输出电压 最高操作频率 最低操作频率 上限频率 下限频率 第一加速时间 第一减速时间 第二加速时间 第二减速时间 第三加速时间 第三减速时间 第四加速时间 第四减速时间 加减速时间单位设定 频率制定来源 运转指令来源 最近第一异常记录 最近第二异常记录 最近第三异常记录 最近第四异常记录 异常再启动次数 自动复位时间
备注
现有设置及备注
故障代码 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34
故障记录代码Байду номын сангаас
故障名称 无异常记录
OC 过电流 OV 过电压 OH 过热 OL 驱动器过载 OL1 电子热动电驿 EF 外部异常 OCC 驱动模块异常 CF3 硬件线路异常 HPF 保护线路异常 ocA 加速中过电流 ocd 减速中过电流 ocn 恒速中过电流 GFF 接地故障 LV 低电压 CF1 CPU 写入数据异常 CF2 CPU 读出数据异常 bb 外部中断 OL2 电机过载 保留 OCDE 软件或密码保护 EF1 外部紧急停止 PHL 缺项 LC 低电流 FbL 回授信号错误 保留 FAnP 风扇电源异常 FF1 风扇 1 异常 FF2 风扇 2 异常 FF3 风扇 3 异常 FF123 风扇 123 异常 FF12 风扇 12 异常 FF13 风扇 13 异常 FF23 风扇 23 异常 FV 风扇驱动线路低电压保护
台达变频器型号清单

VFD004M21A-A VFD004M21A-ZA VFD007M21A-A VFD007M21A-ZA VFD015M21A-A VFD015M21A-ZA VFD022M21A
VFD007M43B-A VFD05M43B-ZA VFD022M43B-A VFD022M43B-ZA VFD037M43A VFD055M43A
VFD004M21B-D 電梯門機專用機 VFD004M21W-D 電梯門機專用機,無外殼
B型变频器,恒转矩、通用负载场合使用,面板可外引,标配含面板
VFD007B21A VFD015B21A VFD022B21A VFD007B43A VFD015B43A VFD015B43A-ZA不帶VFD-PU01操作器 VFD022B43B VFD022B43B-ZA不帶VFD-PU01操作器 VFD037B43A VFD055B43A VFD075B43A VFD110B43A VFD150B43A VFD185B43A VFD220B43A VFD300B43A VFD370B43A VFD450B43A VFD550B43C
VFD550F43A-G VFD750F43A-G VFD900F43C-G VFD1100F43C-G VFD1320F43A-G VFD1600F43A-G VFD1850F43A-G VFD2200F43A-G
E型变频器,恒转矩、通用负载场合使用,面板可外引,标配不含面板
VFD002E21A 未內置煞車單元 VFD004E21A 未內置煞車單元 VFD007E21A 未內置煞車單元 VFD015E21A 內置煞車單元 VFD022E21A 內置煞車單元 VFD004E43A 未內置煞車單元 VFD007E43A 未內置煞車單元 VFD015E43A 未內置煞車單元 VFD022E43A 內置煞車單元 VFD037E43A 內置煞車單元 VFD055E43A 內置煞車單元 VFD075E43A 內置煞車單元 VFD110E43A 內置煞車單元 VFD150E43A 內置煞車單元 VFD185E43A 內置煞車單元 VFD220E43A 內置煞車單元
ENC EDS1000变频驱动器

ENC EDS1000变频驱动器介绍ENC EDS1000变频驱动器是一种先进的驱动器设备,用于控制和调节电机的转速和运行状态。
它具有高度的可靠性和稳定性,适用于各种工业和商业应用。
主要特点- 高效率:ENC EDS1000采用先进的变频技术,能够实现电机的高效率运行,减少能源浪费。
- 精准控制:该驱动器设备可以精确地调节电机的转速和运行状态,以满足不同应用的要求。
- 可编程:ENC EDS1000具有可编程功能,可以根据具体应用需求进行参数设置和调整。
- 多种保护功能:驱动器内置多种保护功能,如过电流保护、过载保护和短路保护,确保设备和电机的安全运行。
应用领域ENC EDS1000变频驱动器广泛应用于以下领域:- 工业自动化:用于控制工业生产线上的电机,实现生产过程的自动化和优化。
- 水处理:用于控制水泵和风机等设备,提高水处理系统的效率和稳定性。
- 制造业:用于各种制造设备的电机控制,提高生产效率和质量。
安装和操作ENC EDS1000变频驱动器的安装和操作非常简单。
以下是安装和操作的基本步骤:1.将驱动器正确地连接到电机和电源。
2.按照设备手册提供的参数设置,对驱动器进行基本配置。
3.连接上位机或控制面板,以实现对驱动器的远程控制。
4.根据实际需求,调节驱动器的参数和运行状态。
维护和故障排除为保证ENC EDS1000变频驱动器的正常运行,需要进行定期维护和故障排除。
以下是一些建议的维护和故障排除方法:- 定期检查电源和连接线路,确保连接可靠。
- 清洁驱动器设备,避免灰尘和污垢积累。
- 定期检查驱动器的保护功能是否正常工作。
- 如果出现故障,按照设备手册提供的故障排除方法进行修复。
总结ENC EDS1000变频驱动器是一种高效率、可靠性强的驱动器设备,广泛应用于工业和商业领域。
它具有精准控制、可编程和多种保护功能等特点,安装和操作简单方便。
定期维护和故障排除可以确保其正常运行和长寿命。
欧诺克 DE系列伺服驱动器 使用说明书

DE系列伺服驱动器使用说明书DE series servo driver instruction manual深圳市欧诺克科技有限公司DE 系列伺服驱动器型号说明DE 系列驱动器规格汇总表驱动器型号供电电压连续电流Amps(Arms)峰值电流Amps(Arms)6S 反馈类型外形尺寸重量DEPC-09003-OPEA 3A (2.1A ) 6A (4.2A )167*100*35mm 0.45kgDEPC-09005-OPEA 5A (3.5A ) 10A (7A )DEPC-09016-OPEA 16A (11A )48A (33A )DEPC-09024-OPEA 24A (16A ) 50A (35A )DEPC-09040-OPEA 40A (28A ) 80A (56A ) 50A (35A ) 100A (70A )DEPC-09050-OPEA 200*114*59mm 1.10kg 200A (140A )100A (70A )DEPC-090100-OPEA DEPC-090150-OPEA 150A (105A ) 250A (175A )221*140*59mm1.45kg 200A (140A ) 300A (210A )221*140*90mm 1.8kg DEPC-090200-OPEA 300A (210A ) 420A (294A )DEPC-090300-OPEA DEPC-090300-OPEA(新) 300A (210A ) 420A (294A )265*140*90mm 2kg DEPC-18024-OPEA 18~180VDC24A (16A ) 50A (35A )167*100*35mm 0.45kg DEPC-18050-OPEA 50A (35A ) 100A (70A )200*114*59mm 1.10kg DEPC-18075-OPEA 75A (52A ) 150A (105A )DEPC-180100-OPEA 100A (70A ) 200A (140A )221*140*59mm 1.45kg DEPC-135100-OPEA 18~135VDCDEPC-135150-OPEA 150A (105A ) 250A (175A )221*140*90mm1.8kgDEPC-125200-OPEA18~125VDC 200A (140A ) 300A (210A )增量式绝对值18~90VDC备注: 1.驱动器供电电压必须大于或者等于电机额定电压2.驱动器的额定电流必须大于或者等于电机的额定电流DEPC-09012- OP E B系列DC/DE/DE2/BC/BC2/DH/BH制动单元B:带制动单元反馈E:光电增量式A/B 正交C:磁电增量式A/B 正交 A17:光电绝对值17bit C17:磁电绝对值17bit R:旋转变压器 H:数字霍尔 S:模拟量正余弦输入指令P:脉冲Hp:高速脉冲A:模拟量R:RS485 C:CANopen E:EtherCAT特殊功能OP:脉冲输出 OA:模拟量输出R:轮切 F:追剪 Z:攻丝机专用额定电流16:16Amps(11Arms) 50:50Amps(35Arms) 150:150Amps(105Arms)供电电压090:18-90VDC 180:18-180VDC 135:18-135VDC 220:220VAC 380:380VAC A:单相B:三相DE 系列端子定义DE 系列外形尺寸图J3J1 J2 J3S1J4 J5J6 J75 4 3 2 1L L 1WHH 3H2H1W1H4 HW2H4 HW 3W4型号L L 1W W1W2W3W4H H1H2H3H4DE-3A~50A 16716035/2-4.5/19.510051224-4.5160DE-75A 200190594-5.0/25/1146032.54-4.8190DE-100A 200190594-5.0/25/1146032.54-4.8190DE-150A 221211595/25/1406045 4.8211DE-200A 221211905/25/140///211DE-300A 221211905/25/140///211DE-300A (新)265255905/25/140///2551、产品简介:1.1概述DE系列可编程智能伺服驱动器是一款通用、高性能、直流供电、结构紧凑的全数字伺服驱动控制器。
台达特殊寄存器

台达特殊寄存器D1000 程序扫描逾时定时器(WDT) (单位: ms)D1001 DVP机种系统程序版本D1002 程序容量D1003 程序内存内容总和D1004 文法校验侦错号码D1005D1006D1007D1008 WDT定时器On之STEP 地址D1009 记录LV讯号曾经发生过的次数D1010 现在扫描时间(单位: 0.1ms)D1011 最小扫描时间(单位: 0.1ms)D1012 最大扫描时间(单位: 0.1ms)D1013D1014D1015 0~32,767(单位: 0.1ms)加算型高速连接定时器D1016D1017D1018 πPI (LOW BYTE)D1019 πPI(HIGH BYTE)D1020 X0~X7输入滤波器,单位msD1021 ES/EH/EH2/SV:X10~X17输入滤波器设置单位为ms;SC:X10~X11输入滤波器(以扫描周期为基底)设置范围0~1000,单位次D1022 ES/EX/SS及SC/SA/SX机种AB相计数器倍频选择D1023D1024D1025 通讯要求发生错误时的代码D1026D1027D1028 指针寄存器E0D1029 指针寄存器F0D1030 Y0 脉冲输出个数Low wordD1031 Y0 脉冲输出个数High wordD1032 Y1 脉冲输出个数Low wordD1033 Y1 脉冲输出个数High wordD1034 测频卡工作模式D1035 设定当成RUN/STOP的X输入点编号D1036 COM1(RS-232)通讯协议D1037 HKY按键重复时间(ms)D1038 PLC主机RS-485通讯当从站时,数据响应延迟时间设定,设定范围0~10,000,时间定义(0.1ms)D1039 固定扫描时间(ms)D1040 步进点S On状态编号1D1041 步进点S On状态编号2D1042 步进点S On状态编号3D1043 步进点S On状态编号4D1044 步进点S On状态编号5D1045 步进点S On状态编号6D1046 步进点S On状态编号7D1047 步进点S On状态编号8D1048D1049 警报点ON的编号D1050 Modbus通讯指令数据处理,PLC系统会自动将D1070~D1085的ASCII字符数据转换为HEX,16进位数值D1051 Modbus通讯指令数据处理,PLC系统会自动将D1070~D1085的ASCII字符数据转换为HEX,16进位数值D1052 Modbus通讯指令数据处理,PLC系统会自动将D1070~D1085的ASCII字符数据转换为HEX,16进位数值D1053 Modbus通讯指令数据处理,PLC系统会自动将D1070~D1085的ASCII字符数据转换为HEX,16进位数值D1054 Modbus通讯指令数据处理,PLC系统会自动将D1070~D1085的ASCII字符数据转换为HEX,16进位数值D1055 Modbus通讯指令数据处理,PLC系统会自动将D1070~D1085的ASCII字符数据转换为HEX,16进位数值D1056 SX/EX模拟输入信道CH0及EH AD卡CH0当前值D1057 SX/EX模拟输入信道CH1及EH AD卡CH1当前值D1058 EX模拟输入信道CH2当前值D1059 EX模拟输入信道CH3当前值D1060D1061 系统错误讯息:停电保持区错误次数纪录D1062 设定SX机种AD0,AD1的平均次数(2~4次)D1063D1064D1065D1066D1067 演算错误之侦错号码D1068 演算错误地址锁定D1069 M1065~M1067发生错误之地址D1070 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1071 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1072 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1073 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1074 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1075 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1076 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1077 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1078 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1079 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1080 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1081 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1082 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1083 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1084 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1085 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出指令,当受信端接收后会回传信息,该信息会储存于D1070~D1085,使用者可利用该寄存器的内容,查看回传数据D1086 DVP-PCC01密码设定值Low word (以ASCII字符对应之HEX值表示)D1087 DVP-PCC01密码设定值Low word (以ASCII字符对应之HEX值表示)D1088D1089 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1090 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1091 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1092 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1093 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1094 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1095 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1096 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1097 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1098 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1099 Modbus通讯指令数据处理,PLC内建RS-485通讯便利指令,该指令执行时所送出的指令字符储存于D1089~D1099,使用者可根据该寄存器的内容,查看指令是否正确D1100 LV讯号动作后对应状态D1101 文件寄存器开始地址D1102 文件寄存器复制笔数D1103 设成文件寄存器存入之开始D编号(须大于2000)D1104 加减速脉冲输出使用控制寄存器(D)起始编号D1105D1106D1107D1108D1109 COM3 通讯格式设定D1110 SX/EX模拟输入信道CH0及EH AD卡CH0平均值D1111 SX/EX模拟输入信道CH1及EH AD卡CH1平均值D1112 EX模拟输入信道CH 2 平均值D1113 EX模拟输入信道CH 3 平均值D1114D1115D1116 SX/EX模拟输出CH 0,EH DA卡CH 0D1117 SX/EX模拟输出CH 1,EH DA卡CH 1D1118 SX/EX/EH模拟/数字转换取样时间(ms)D1119D1120 RS-485通讯协议D1121 PLC通讯地址(储存PLC通讯地址,具停电保持功能)D1122 发送数据剩余字数D1123 接收数据剩余字数D1124 起始字符定义(STX)D1125 第一结束字符定义D1126 第二结束字符定义D1127 RS指令特定字符通讯接收中断请求(I150)D1128D1129 通讯逾时异常,时间定义(ms)D1130 MODBUS回传错误码记录D1131D1132D1133 SA/SX:特殊高速脉波Y0 (50KHz)输出控制寄存器(D)起始编号SCV1.4以上:两轴同动控制,Y10输出控制寄存器(D)起始编号D1134 两轴同动控制,设定Y10输出之区段数(SC机种专用)D1135 两轴同动控制,Y11输出控制缓存器(D)起始编号(SCV1.4以上机种专用)D1136 两轴同动控制,设定Y11输出之区段数(SCV1.4以上机种专用)D1137 操作数使用错误发生时的地址D1138D1139 BCD模块扩充机连接台数指示(最多两台)D1140 特殊扩充模块台数,最多8台D1141D1142 扩充机X 点数D1143 扩充机Y 点数D1144 可调斜率之加减速脉冲输出Y0控制寄存器(D)起始编号D1145 左侧高速特殊扩充模块台数,最多8台(仅支持SV机种)D1146 DISP扩充机连接台数D1147 记忆卡形式MEMORY CARD TYPEb0=0:表示没有插卡(H0000)b0=1:表示有FLASH CARDb8=0:表示FLASH CARD开关为Off (H0001)b8=1:表示FLASH CARD开关为On (H0101) D1148 系统使用标志信号D1149 功能扩充卡种类:0:没有插卡,1:RS-232、DU-01,2:RS-422,3:COM3,4:模拟式旋钮开关,5:数字式开关,6:晶体输出卡,7:高速脉冲输出卡,8:2AD卡,9:2DA卡D1150 DHSZ指令多组设定值比较模式表格计数寄存器D1151 DHSZ指令频率控制模式表格计数寄存器D1152 DHSZ D值改变的High wordD1153 DHSZ D值改变的Low wordD1154 可调斜率之加减速脉冲Y0输出功能减速间隔时间(10~32,767 ms)建议使用值D1155 可调斜率之加减速脉冲Y0输出功能减速间隔频率( -1~ - 32700 Hz) 建议使用值D1156 RTMU指令指定之特D(编号K0~K9)D1157 RTMU指令指定之特D(编号K0~K9)D1158 RTMU指令指定之特D(编号K0~K9)D1159 RTMU指令指定之特D(编号K0~K9)D1160 RTMU指令指定之特D(编号K0~K9)D1161 RTMU指令指定之特D(编号K0~K9)D1162 RTMU指令指定之特D(编号K0~K9)D1163 RTMU指令指定之特D(编号K0~K9)D1164 RTMU指令指定之特D(编号K0~K9)D1165 RTMU指令指定之特D(编号K0~K9)D1166 X10上下缘计数模式切换(SC机种专用)D1167 X11上下缘计数模式切换(SC机种专用)D1168 特定字符通讯接收中断请求(I150)D1169 RS指令特定长度通讯接收中断请求(I160) D1170 单步执行(Single step) 执行时的PC值D1171D1172 两相脉冲输出频率(12Hz~20KHz)D1173 两相脉冲输出模式选择(K1及K2)D1174 两相输出脉冲目标个数低16位D1175 两相输出脉冲目标个数高16位D1176 两相脉冲目前输出个数低16位D1177 两相脉冲目前输出个数高16位D1178 VR0值D1179 VR1值D1180 中断I401抓取高速计数值之低16字节D1181 中断I401抓取高速计数值之高16字节D1182 指针寄存器E1D1183 指针寄存器F1D1184 指针寄存器E2D1185 指针寄存器F2D1186 指针寄存器E3D1187 指针寄存器F3D1188 指针寄存器E4D1189 指针寄存器F4D1190 指针寄存器E5D1191 指针寄存器F5D1192 指针寄存器E6D1193 指针寄存器F6D1194 指针寄存器E7D1195 指针寄存器F7D1196 显示器内容设定(SX机种使用)D1197 系统使用标志信号D1198 中断I501抓取高速计数值之低16字节D1199 中断I501抓取高速计数值之高16字节D1200 M0~M999辅助继电器停电保持开始地址D1201 M0~M999辅助继电器停电保持结束地址D1202 M2000~M4095辅助继电器停电保持开始地址D1203 M2000~M4095辅助继电器停电保持开始地址D1204 T0~T199,100ms 定时器停电保持开始地址D1205 T0~T199,100ms 定时器停电保持结束地址D1206 T200~T239,10ms 定时器停电保持开始地址D1207 T200~T239,10ms 定时器停电保持结束地址D1208 C0~C199,16位计数器停电保持开始地址D1209 C0~C199,16位计数器停电保持结束地址D1210 C200~C234,32位计数器停电保持开始地址D1211 C200~C234,32位计数器停电保持结束地址D1212 C235~C255,32位高速计数器停电保持开始地址D1213 C235~C255,32位高速计数器停电保持结束地址D1214 S0~S899步进点停电保持开始地址D1215 S0~S899步进点停电保持结束地址D1216 D0~D999寄存器停电保持开始地址D1217 D0~D999寄存器停电保持结束地址D1218 D2000~D9999寄存器停电保持开始地址D1219 D2000~D9999寄存器停电保持结束地址D1220 第一组脉冲输出相位D1221 第二组脉冲输出相位D1222 设定DRVI, DDRVI, DRV A, DDRV A, PLSV, DPLSV第一组脉波CH0(Y0,Y1)之方向讯号与脉冲输出点之间送出的时间差D1223 设定DRVI, DDRVI, DRV A, DDRV A, PLSV, DPLSV第二组脉波CH1(Y2,Y3)之方向讯号与脉冲输出点之间送出的时间差D1224D1225 第一组计数器(HHSC0)计数方式设定D1226 第二组计数器(HHSC1)计数方式设定D1227 第三组计数器(HHSC2)计数方式设定D1228 第四组计数器(HHSC3)计数方式设定D1229D1230D1231D1232D1233D1234D1235D1236D1237D1238D1239D1240D1241D1242D1243D1244D1245D1246D1247D1248D1249D1250D1251D1252D1253D1254D1255D1256 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1257 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1258 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1260 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1261 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1262 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1263 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1264 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1265 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1266 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1267 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1268 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1270 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1271 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1272 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1273 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1274 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1275 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1276 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1277 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1278 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1280 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1281 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1282 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1283 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1284 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1285 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1286 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1287 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1288 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1290 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1291 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1292 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1293 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1294 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1295 PLC内建RS-485通讯便利指令MODRW,该指令执行时所送出的指令字符储存于D1256~D1295,使用者可根据该寄存器的内容,查看指令是否正确D1296 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1297 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1298 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1300 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1301 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1302 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1303 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1304 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1305 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1306 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1307 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1308 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1310 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311D1311 PLC内建RS-485通讯便利指令MODRW ,系统会自动将使用者指定接收之寄存器内容的ASCII字符数据转换为HEX 数据值储存于D1296~D1311。
台达变频器参数手册
DPD-T参数表手册50126199002013-08D P P0DPD-T_1参数一览表使用者可快速搜寻各参数的设定范围及出厂设定值,方便自行设定参数。
可以藉由操作面板设定参数、变更设定值及重置参数。
2)「备注」字段,提供使用者在自行设定后,可记录下自行设定值。
3)详尽的参数说明,请参阅使用手册。
00驱动器参数参数码参数名称设定范围初始值备注00-00驱动器机种代码识别5: 460V, 1HP7: 460V, 2HP9: 460V, 3HP11: 460V, 5HP (3.7kW)13: 460V, 7.5HP15: 460V, 10HP17: 460V, 15HP19: 460V, 20HP21: 460V, 25HP23: 460V, 30HP25: 460V, 40HP27: 460V, 50 HP29: 460V, 60HP31: 460V, 75HP33: 460V, 100HP35: 460V, 125HP37: 460V, 150HP39: 460V, 175HP41: 460V, 215HP43: 460V, 250HP45: 460V, 300HP47: 460V, 375HP49: 460V, 425HP51: 460V, 475HP55:460V, 600HP93: 460V, 5HP (4kW)只读00-01 驱动器额定电流显示依机种显示只读00-02 参数重置设定0: 无功能1:参数写保护5:KWH显示内容值归零6:重置PLC (包含CANopen主站相关设定)7:重置CANopen从站相关设定8:面板操作无效9:参数重置(基底频率为50Hz)10:参数重置(基底频率为60Hz)00-03开机显示画面选择0:F(频率指令)1:H(输出频率)2:U(使用者定义)参数00-043:A (输出电流)00-04 多功能显示选择0:示驱动器至电机之输出电流(A)1:计数值(c)2:示驱动器实际输出频率(H.)3:示驱动器内直流侧之电压值DC-BUS电压(v)4:示驱动器之U, V, W输出电压值(E)5:驱动器输出之功因角度(n)6:示驱动器输出之功率kW(P)7:示电机实际速度,以rpm为单位(r)8:示驱动器估算之输出转矩%,3DPD-T_2电机额定转矩为100%(t)9:示PG回授(G)(参考参数10-00及10-01)10:示PID回授值%(b)11:示AVI模拟输入端子之讯号值%(1.)12:示ACI模拟输入端子之讯号值%(2.)13:示AUI模拟输入端子之讯号值%(3.)14:示驱动器功率模块IGBT的温度℃(i.)15:示驱动器电源电容的温度℃(c.)16: 输入 ON/OFF 状态(i)17:字输出 ON/OFF 状态(o)18:示正在执行多段速的段速(S)19:输入对应之CPU 脚位状态(d)20:字输出对应之CPU 脚位状态(0.)21:机实际位置(PG卡PG 1)(P.)22:波输入频率(PG卡PG 2)(S.)23:波输入位置(PG卡PG 2)(q.)24:示全程位置控制下的追踪误差(E.)25:载计数(0.00~100.00%)(o.) 26:GFF对地短路电流(单位:%)(G.)27:母线电压Dcbus 链波(单位:Vdc) (r.)28:显示PLC缓存器D1043之值(C)29:同步电机磁极区段显示(EMC-PG01U应用)(4.)30:使用者定义输出显示(U)31:参数00-05使用者增益显示(K)32:驱动器运转时,电机的运转数(PG卡应用,且有Z相讯号输入) (Z.)33:驱动器运转时,电机的运转位置(PG卡应用)(q)34:风扇运转速度(%) (F.)35: 控制模式显示 0: 速度控制模式(SPD); 1: 转矩控制模式(TQR) (t.)36:驱动器当前运转载波频率(Hz) (J.)37:保留38:驱动器状态(6.)39:显示交流电机驱动器估算之输出正负转矩,以Nt-m为单位(t 0.0:正转矩;- 0.0:负转矩)(C.)40: 轉矩命令,單位%(L)41: KWH顯示, 單位KWH(J) 42: PID參考目標, 單位%(h.) 43: PID偏移量, 單位%(o.)44: PID輸出頻率, 單位Hz(b.) DPD-T_300-05 实际输出频率比例增益系数0~160.00 100-06 软件版本仅供读取 #.#00-07 参数保护解碼输入0~655350~3:记录密码错误次数00-08 参数保护密码输入0~655350:未设定密码锁或00-07密码输入成功1:参数已被锁定00-09 保留00-10 控制模式0:速度模式1:点对点位置控制2:转矩模式3:归原点模式00-11 速度模式控制选择0: VF(感应电机 V/F控制)1: VFPG(感应电机 V/F控制+编码器)2: SVC(感应电机无感测向量控制)3: FOCPG(感应电机磁场导向向量控制+编码器)4: FOCPG(同步电机磁场导向向量控制+编码器)5: FOC Sensorless(感应电机磁场导向无感测向量控制)6: PM Sensorless (同步电机磁场导向无感测向量控制)00-12 点对点位置模式0:相对位置1:绝对位置00-13 转矩模式控制选择0: TQCPG(感应电机转矩控制+编码器)1: TQCPG (同步电机转矩控制+编码器)2: TQC Sensorless (感应电机无感测转矩控制)00-14 保留00-15 保留00-16 负载选择0:一般负载1:重载00-17 载波频率一般負載 [460V]1-15HP [1-20HP] 2~15KHz20-50HP [25-75HP] 2~10KHz60-125HP [100-475HP] 2~09KHz重載[460V]1-15HP [1-20HP] 2~15KHz20-50HP [25-75HP] 2~10KHz60-125HP [100-475HP] 2~09KHz864200-18 保留00-19 PLC命令屏蔽Bit 0: 控制命令强制由PLC控制Bit 1: 频率命令强制由PLC控制Bit 2: 位置命令由PLC强制控制Bit 3: 扭力命令强制由PLC控制只读00-20 频率指令来源设定(AUTO)0:由键盘输入1:由通讯RS485输入2:由外部模拟输入(参数03-00)3:由外部up/down端子4:脉波(Pulse)输入不带转向命令(参考参数10-16,不考虑方向)5:脉波(Pulse)输入带转向命令DPD-T_4(参考参数10-16)6:由CANopen通讯卡7:保留8:由通讯卡(不含CANopen卡)00-21 运转指令来源设定(AUTO)0:数字操作器操作1:外部端子操作2:通讯RS-4853:由CANopen通讯卡4:保留5:由通讯卡(不含CANopen卡)00-22 停车方式0:以减速煞车方式停止1:以自由运转方式停止00-23 运转方向选择0:可正反转1:禁止反转2:禁止正转00-24 通讯频率命令记忆仅供读取只读00-25 使用者定义属性Bit 0~3: 控制使用者定义的小数点数0000b: 无小数点0001b: 小数点1位0010b: 小数点2位0011b: 小数点3位Bit 4~15: 控制使用者定义的单位显示000xh: Hz001xh: rpm002xh: %003xh: kg004xh: M/S005xh: kW006xh: HP007xh: PPM008xh: l / m009xh: kg/s00Axh: kg/m00Bxh: kg/h00Cxh: lb/s00Dxh: lb/m00Exh: lb/h00Fxh: ft/s010xh: ft/m011xh: M012xh: ft013xh: degC014xh: degF015xh: mbar016xh: bar017xh: Pa018xh: kPa019xh: mWG01Axh: inWG01Bxh: ftWG01Cxh: Psi01Dxh: Atm01Exh: L/s01Fxh: L/m020xh: L/h021xh: m3/s022xh: m3/h023xh: GPM024xh: CFM00-26 使用者定义的最大值0:无功能0~65535 (当参数00-25设定无小数点)DPD-T_5DPD-T_6归原点 4:正转直接寻找Z 脉波作为7: 反转方向原点复归,ORG : ON→OFF 作为复归原点8: 直接定义当前位置作为原点Y 需搭配X 选项为0, 1, 2, 3, 6, 70: 返回找Z脉波1: 不返回找Z脉波, 继续往前找Z脉波2: 一律不找Z脉波Z 当遭遇极限时,需搭配X 选项为2, 3, 4, 5, 6, 70: 显示错误1: 方向反转00-41 归原点第一频率 0.00~600.00Hz 8.00 00-42 归原点第二频率 0.00~600.00Hz 2.00 00-43~00-47保留00-48 电流显示滤波时间 0.001~65.535秒 0.10000-49 数字操作器显示滤波时间0.001~65.535秒0.10000-50 软件版本日期码仅供读取 ##### 00-51~00-61保留DPD-T_701 基本参数参数码参数名称设定范围初始值备注01-00最高操作频率50.00~600.00Hz 60.00/ 50.0001-01 电机1输出频率设定0.00~600.00Hz 60.00/ 50.0001-02 电机1输出电压设定460V机种:0.0V~510.0V 400.001-03 电机1输出中间1频率设定0.00~600.00Hz 3.0001-04 电机1输出中间1电压设定460V机种:0.0V~480.0V 22.001-05 电机1输出中间2频率设定0.00~600.00Hz 0.5001-06 电机1输出中间2电压设定460V机种:0.0V~480.0V 4.001-07 电机1输出最低频率设定0.00~600.00Hz 0.0001-08 电机1输出最小电压设定460V机种:0.0V~480.0V 0.001-09 启动频率 0.00~600.00Hz 0.5001-10 上限频率 0.00~600.00Hz 600.0001-11 下限频率 0.00~600.00Hz 001-12 第一加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-13 第一减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-14 第二加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-15 第二减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-16 第三加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-17 第三减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-18 第四加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-19 第四减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-20 寸动(JOG)加速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-21 寸动(JOG)减速时间设定参数01-45=0:0.00~600.00秒参数01-45=1:0.00~6000.0秒30HP以上机种:60.00/60.010.0010.001-22 寸动(JOG)频率设定0.00~600.00Hz 6.0001-23 第一段/第四段加减速切换频率0.00~600.00Hz 0.0001-24 S加速起始时间设定1参数01-45=0:0.00~25.00秒参数01-45=1:0.0~250.0秒0.200.201-25 S加速到达时间设定2参数01-45=0:0.00~25.00秒参数01-45=1:0.0~250.0秒0.200.201-26 S减速起始时间设定1参数01-45=0:0.00~25.00秒参数01-45=1:0.0~250.0秒0.200.2DPD-T_8参数码参数名称设定范围初始值备注01-27 S减速到达时间设定2参数01-45=0:0.00~25.00秒参数01-45=1:0.0~250.0秒0.200.201-28 禁止设定频率1上限0.00~600.00Hz 0.00 01-29 禁止设定频率1下限0.00~600.00Hz 0.00 01-30 禁止设定频率2上限0.00~600.00Hz 0.00 01-31 禁止设定频率2下限0.00~600.00Hz 0.00 01-32 禁止设定频率3上限0.00~600.00Hz 0.00 01-33 禁止设定频率3下限0.00~600.00Hz 0.0001-34 零速模式选择0:输出等待1:零速运转2:Fmin (依据参数01-07、01-41)01-35 电机2输出频率设定0.00~600.00Hz 60.00/ 50.0001-36 电机2输出电压设定460V机种:0.0V~510.0V 400.001-37 电机2输出中间1频率设定0.00~600.00Hz 3.0001-38 电机2输出中间1电压设定460V机种:0.0V~480.0V 22.001-39 电机2输出中间2频率设定0.00~600.00Hz 0.5001-40 电机2输出中间2电压设定460V机种:0.0V~480.0V 4.001-41 电机2输出最低频率设定0.00~600.00Hz 0.0001-42 电机2输出最小电压设定460V机种:0.0V~480.0V 0.001-43 V/F曲线选择0:依照参数01-00~01-08设定1:1.5次方曲线2:2次方曲线01-44 自动加减速设定0:直线加减速1:自动加速,直线减速2:直线加速,自动减速3:自动加减速4:直线,以自动加减速作为失速防止(受限参数01-12~01-21)01-45 加减速及S曲线时间单位0:单位0.01杪1:单位0.1秒01-46 CANopen快速停止时间参数01-45=0: 0.00~600.00秒参数01-45=1: 0.0~6000.0秒1.00DPD-T_902 数字输入/输出参数参数码参数名称设定范围初始值备注02-00二线/三线式运转控制0: 2 线式模式1,电源启动运转控制动作1: 2 线式模式2,电源启动运转控制动作2: 3线式, 电源启动运转控制动作02-01 多功能输入指令一(MI1)0:无功能 102-02 多功能输入指令二(MI2)1:多段速指令1/多段位置指令1 202-03 多功能输入指令三(MI3)2:多段速指令2/多段位置指令2 302-04 多功能输入指令四(MI4)3:多段速指令3/多段位置指令3 402-05 多功能输入指令五(MI5)4:多段速指令4/多段位置指令4002-06 多功能输入指令六(MI6)5:异常复归指令Reset 002-07 多功能输入指令七(MI7)6:JOG指令(依KPC-CC01或外部控制)02-08 多功能输入指令八(MI8)7:加减速禁止指令 002-26 加装扩充卡之输入端子(MI10)8:第一、二加减速时间切换002-27 加装扩充卡之输入端子(MI11)9:第三、四加减速时间切换002-28 加装扩充卡之输入端子(MI12)10:EF输入(参数07-20) 002-29 加装扩充卡之输入端子(MI13)11:外部中断B.B.输入(BaseBlock)02-30 加装扩充卡之输入端子(MI14)12:电压输出禁能002-31 加装扩充卡之输入端子(MI15)13:取消加减速设定014:电机1、2切换15:转速命令来自AVI16:转速命令来自ACI17:转速命令来自AUI18:强制停机(参数07-20)19: 频率上升外部命令20: 频率下降外部命令21:PID 功能取消22:计数器清除23:计数输入(MI6)24:FWD JOG指令25:REV JOG指令26:TQC/FOC 模式切换27:ASR1/ASR2切换28:紧急停止(EF1)29:电机线圈Y接确认讯号30:电机线圈△接确认讯号31:高转矩补偿量(参数11-30)32:中转矩补偿量(参数11-31)33:低转矩补偿量(参数11-32)34:多段速/多段位置端子功能设定切换35:内部定位致能36:多段位置教导致能(停机时有效)DPD-T_1037:全程位置控制脉波输入命令致能38:写入EEPROM禁止39:转矩命令方向40:强制自由运转停止41:HAND切换42:AUTO切换43:分辨率切换致能(参考参数02-48)44:反转NL复归原点45:正转PL复归原点46:ORG复归原点47:复归原点动作致能48:机械齿轮比切换49:驱动器致能50:从站dEb动作输入51:PLC 模式切换的选择bit 0 52:PLC 模式切换的选择bit 1 53:CANopen 快速停车的触发54~55:保留56: Local/Remote 切换57~70: 保留02-09 UP/DOWN键模式0:up/down依加减速时间1:up/down定速(参数02-10)02-10 定速UP/DOWN键加减速速率0.01~1.00Hz/ms 0.0102-11 多功能输入响应时间0.000~30.000秒 0.00502-12 多功能输入模式选择0000h~FFFFh(0:N.O.;1:N.C.)000002-13 多功能输出1 RY1 0:无功能 11 02-14 多功能输出2 RY2 1:运转中指示 102-16 多功能输出3 (MO1)2:运转速度到达 002-17 多功能输出4 (MO2)3:任意频率到达 1 (参数02-22)002-36 加装扩充卡之输出端子(MO10)4:任意频率到达 2 (参数02-24)002-37 加装扩充卡之输出端子(MO11)5:零速(频率命令) 002-38 加装扩充卡之输出端子(MO12)6:零速含STOP(频率命令) 002-39 加装扩充卡之输出端子(MO13)7:过转矩1(参数06-06~06-08)002-40 加装扩充卡之输出端子(MO14)8:过转矩2(参数06-09~06-11)002-41 加装扩充卡之输出端子(MO15)9:驱动器准备完成002-42 加装扩充卡之输出端子(MO16)10:低电压警报(LV)(参数06-00)002-43 加装扩充卡之输出端子(MO17)11:故障指示002-44 加装扩充卡之输出端子(MO18)12:机械煞车释放(参数02-32)002-45 加装扩充卡之输出端子(MO19)13:过热警告(参数06-15) 002-46 加装扩充卡之输出端子(MO20)14:软件煞车动作指示(参数07-00)0 15:PID 偏差警告16:滑差异常(oSL)17:计数值到达不归0(参数02-20)DPD-T_1118:计数值到达归0(参数02-19)19:外部中断B. B. 输入(BaseBlock)20:警告输出21:过电压警告22:过电流失速防止警告23:过电压失速防止警告24:驱动器操作模式25:正转命令26:反转命令27:高于参数02-33设定电流准位时输出 (>= 02-33)28:低于参数02-33,设定电流准位时输出(<=02-33)29:高于参数02-34的设定频率时输出 (>= 02-34)30:低于参数02-34的设定频率时输出 (<= 02-34)31:电机线圈切换Y接命令32:电机线圈切换△接命令33:零速(实际输出频率)34:零速含Stop (实际输出频率)35:错误输出选择 1 (参数06-23)36:错误输出选择 2 (参数06-24)37:错误输出选择 3 (参数06-25)38:错误输出选择 4 (参数06-26)39:位置到达(参数10-19)40:运转速度(频率)到达含停止41:多点定位到达42:天车动作43:电机实际速度输出高于参数02-4744:低电流输出(搭配06-71~06-73)45:UVW 输出电磁阀开关动作46:主站dEb动作发生输出47:煞车闭合输出48:保留49:归原点动作完成输出50:提供给CANopen当做控制输出51:提供给RS485当做控制输出52:提供给通讯卡当做控制输出53~64:保留65: CANopen & RS485输出02-18 多功能输出方向 0000h~FFFFh(0:N.O.;1:N.C.)000002-19 最后计数值到达设定(归0)0~65500 002-20 计数值到达设定(不归0)0~65500 002-21 数字输出增益(DFM)1~166 102-22 任意到达频率 1 0.00~600.00Hz 60.00/ 50.0002-23 任意到达频率1 宽度0.00~600.00Hz 2.0002-24 任意到达频率 2 0.00~600.00Hz 60.00/ 50.0002-25 任意到达频率2 宽度0.00~600.00Hz 2.00 02-32 煞车动作延迟时间 0.000~65.000秒 0.000DPD-T_1202-33 多功能输出端子动作之输出电流准位设定0~150% 002-34 多功能输出端子动作之输出频率设定0.00~600.00Hz(使用PG时,为电机速度)3.0002-35 重置、电源启动后外部控制运转选择0:无效1:重置后,若运转命令存在驱动器执行运转02-47 电机零速速度准位 0~65535rpm 002-48 分辨率切换的最大频率0.00~600.00Hz 60.0002-49 切换最高输出频率之延迟时间0.000~65.000秒0.00002-50 多机能输入端子动作状态监控多机能输入端子动作状态只读02-51 多机能输出端子动作状态监控多机能输出端子动作状态只读02-52 显示被PLC所使用的外部多功能输入端子监控PLC功能输入端子动作状态只读02-53 显示被PLC所使用的模拟输入端子监控PLC功能输出端子动作状态只读02-54 显示外部端子使用频率命令记忆仅供读取只读02-55 保留02-56 保留02-57 多功能输出端子动作42之抱闸电流检出准位0~150%002-58 多功能输出端子动作42之抱闸输出频率检出0.00~600.00Hz0.00DPD-T_1303 模拟输入/输出参数参数码参数名称设定范围初始值备注03-00 AVI模拟输入功能选择0:无功能 103-01 ACI模拟输入功能选择1:频率命令(转矩控制模式下的转速限制)03-02 AUI模拟输入功能选择2:转矩命令(速度模式下的转矩限制)3:转矩补偿命令4:PID 目标值5:PID 回授讯号6:正温度系数热敏电阻(PTC)输入值7:正向转矩限制8:负向转矩限制9:回生转矩限制10:正/负向转矩限制11:PT100 热敏电阻输入值12:保留13:PID偏移量14~17:保留03-03AVI 模拟输入偏压-100.0~100.0% 0 03-04 ACI 模拟输入偏压 -100.0~100.0% 003-05 AUI 模拟正电压输入偏压-100.0~100.0% 003-06 保留03-07 AVI正负偏压模式 03-08 ACI正负偏压模式 03-09 AUI正负偏压模式0:无偏压1:低于偏压=偏压2:高于偏压=偏压3:以偏压为中心取绝对值4:以偏压为中心03-10 模拟信号输入为负频率的反转设定0:不允许负频率输入,正反转动作由数字操作器或外部端子控制1:允许负频率输入,正频率正转,负频率反转,数字操作器或外部端子控制无法控制正反转03-11 AVI 模拟输入增益 -500.0~500.0% 100.0 03-12 ACI 模拟输入增益 -500.0~500.0% 100.003-13 AUI 模拟输入正向增益-500.0~500.0% 100.003-14 AUI 模拟输入负向增益-500.0~500.0% 100.003-15 AVI模拟输入滤波时间0.00~20.00秒0.0103-16 ACI模拟输入滤波时间0.00~20.00秒0.0103-17 AUI模拟输入滤波时间0.00~20.00秒0.0103-18 模拟输入相加功能0:不可相加(AVI、ACI、AUI)1:可相加03-19 ACI断线选择0:无断线选择1:以断线前的频率命令持续运转2:减速到0H z3:立即停车并显示ACE03-20 多功能输出1 (AFM1)0:输出频率 (Hz) 0 03-23 多功能输出2 1:频率命令 (Hz) 0 (AFM2)2:马达转速 (Hz)3:输出电流 (rms)4:输出电压DPD-T_145:DC Bus 电压6:功率因子7:功率8:输出转矩9:AVI10:ACI11:AUI12:Iq电流命令13:Iq回授值14:Id电流命令15:Id回授值16:无功能17:无功能18:转矩命令19:PG2频率命令20:CANopen模拟输出21:RS485模拟输出22:通讯卡模拟输出23:固定电压输出03-21 模拟输出一增益(AFM 1)0~500.0% 100.003-22 模拟输出一反向致能(AFM 1)0:输出电压绝对值1:反向输出0V;正向输出0-10V2:反向输出5-0V;正向输出5-10V03-24 模拟输出二增益(AFM 2)0~500.0% 100.003-25 模拟输出二反向致能(AFM 2)0:输出电压绝对值1:反向输出0V;正向输出0-10V2:反向输出5-0V;正向输出5-10V03-26 保留03-27 AFM2 輸出偏壓-100.00~100.00% 0.0003-28 AVI端子输入选择0: 0-10V1: 0-20mA2: 4-20mA03-29 ACI端子输入选择0: 4-20mA1: 0-10V2: 0-20mA03-30 显示被PLC所使用的模拟输出端子监控PLC功能模拟输出端子动作状态只读03-31 AFM2 输出选择0: 0-20mA输出1: 4-20mA输出03-32 AFM1 直流输出设定准位0.00~100.00% 0.0003-33 AFM2 直流输出设定准位0.00~100.00% 0.0003-34 保留03-35 AFM1輸出率波時間0.00 ~ 20.00 秒0.01 03-36 AFM2輸出率波時間0.00 ~ 20.00 秒0,01 03-37~03-49保留03-50 模拟输入曲线选择0: 一般曲线1: AVI 三点曲线2: ACI 三点曲线3: AVI & ACI三点曲线4: AUI 三点曲线5: AVI & AUI 三点曲线6: ACI & AUI 三点曲线7: AVI & ACI & AUI 三点曲线DPD-T_1503-51 AVI最低点03-28=0, 0.00~10.00V03-28≠0, 0.00~20.00mA0.0003-52 AVI最低点对应百分比0.00~100.00% 0.0003-53 AVI中间点03-28=0, 0.00~10.00V03-28≠0, 0.00~20.00mA5.0003-54 AVI中间点对应百分比0.00~100.00% 50.0003-55 AVI最高点03-28=0, 0.00~10.00V03-28≠0, 0.00~20.00mA10.0003-56 AVI最高点对应百分比0.00~100.00% 100.0003-57 ACI 最低点03-29=1, 0.00~10.00V03-29≠1, 0.00~20.00mA4.0003-58 ACI 最低点对应百分比0.00~100.00% 0.0003-59 ACI中间点03-29=1, 0.00~10.00V03-29≠1, 0.00~20.00mA12.0003-60 ACI中间点对应百分比0.00~100.00% 50.0003-61 ACI最高点03-29=1, 0.00~10.00V03-29≠1, 0.00~20.00mA20.0003-62 ACI最高点对应百分比0.00~100.00% 100.0003-63 正电压AUI最低点 0.00~10.00V 0.0003-64 正电压AUI最低点对应百分比-100.00~ +100.00% 0.0003-65 正电压AUI中间点 0.00~10.00V 5.0003-66 正电压AUI中间点对应百分比-100.00~ +100.00% 50.0003-67 正电压AUI最高点 0.00~10.00V 10.0003-68 正电压AUI最高点对应百分比-100.00~ +100.00% 100.0003-69 负电压AUI最低点 -10.00~0.00V 0.0003-70 负电压AUI最低点对应百分比-100.00~ +100.00% 0.0003-71 负电压AUI中间点 -10.00~0.00V -5.0003-72 负电压AUI中间点对应百分比-100.00~ +100.00% -50.0003-73 负电压AUI最高点 -10.00~0.00V -10.0003-74 负电压AUI最高点对应百分比-100.00 ~ +100.00% -100.00DPD-T_1604 多段速参数参数码参数名称设定范围初始值备注 04-00第一段速0.00~600.00Hz 0.0004-01第二段速0.00~600.00Hz 0.0004-02第三段速0.00~600.00Hz 0.0004-03第四段速0.00~600.00Hz 0.0004-04第五段速0.00~600.00Hz 0.0004-05第六段速0.00~600.00Hz 0.0004-06第七段速0.00~600.00Hz 0.0004-07第八段速0.00~600.00Hz 0.0004-08第九段速0.00~600.00Hz 0.0004-09第十段速0.00~600.00Hz 0.0004-10第十一段速0.00~600.00Hz 0.0004-11第十二段速0.00~600.00Hz 0.0004-12第十三段速0.00~600.00Hz 0.0004-13第十四段速0.00~600.00Hz 0.0004-14第十五段速0.00~600.00Hz 0.0004-15位置指令1 转数-30000~30000 004-16位置指令1 脉波数-32767~32767 004-17位置指令2 转数-30000~30000 004-18位置指令2 脉波数-32767~32767 004-19位置指令3 转数-30000~30000 004-20位置指令3 脉波数-32767~32767 004-21位置指令4 转数-30000~30000 004-22位置指令4 脉波数-32767~32767 004-23位置指令5 转数-30000~30000 004-24位置指令5 脉波数-32767~32767 004-25位置指令6 转数-30000~30000 004-26位置指令6 脉波数-32767~32767 004-27位置指令7 转数-30000~30000 004-28位置指令7 脉波数-32767~32767 004-29位置指令8 转数-30000~30000 004-30 位置指令8 脉波数-32767~32767 004-31 位置指令9 转数-30000~30000 004-32 位置指令9 脉波数-32767~32767 004-33 位置指令10 转数-30000~30000 004-34 位置指令10 脉波数-32767~3276704-35 位置指令11 转数-30000~30000 0 04-36 位置指令11 脉波数-32767~32767 0 04-37 位置指令12 转数-30000~30000 004-38 位置指令12 脉波数-32767~3276704-39 位置指令13 转数-30000~30000 004-40 位置指令13 脉波数-32767~3276704-41 位置指令14 转数-30000~30000 004-42 位置指令14 脉波数-32767~3276704-43 位置指令15 转数-30000~30000 004-44 位置指令15 脉波数-32767~3276704-45~04-49保留04-50 PLC暂存位置1 0~65535 0 04-51 PLC暂存位置2 0~65535 004-52 PLC暂存位置3 0~65535 004-53 PLC暂存位置4 0~65535 0DPD-T_17参数码参数名称设定范围初始值备注04-54 PLC暂存位置5 0~65535 004-55 PLC暂存位置6 0~65535 004-56 PLC暂存位置7 0~65535 004-57 PLC暂存位置8 0~65535 004-58 PLC暂存位置9 0~65535 004-59 PLC暂存位置10 0~65535 0DPD-T_1805 电机参数参数码参数名称设定范围初始值备注05-00电机参数自动量测0:无功能1:感应电机之动态测试2:感应电机之静态测试4:永磁电机磁极原点动态测试5:永磁电机磁参数动态测试6:感应电机磁通动态曲线测试12: FOC Sensorless惯量估测13:同步电机参数高频堵转测试05-01IM电机1满载电流(A)驱动器额定电流的10~120%#.##05-02 IM电机1额定功率(kW)0~655.35kW#.##05-03 IM电机1额定转速(rpm)0~ 17991710(60Hz 4极);1410(50Hz 4极)171005-04 IM电机1极数2~ 4 405-05 IM电机1无载电流(A)0.00~ 参数05-01出厂设定值#.##05-06 IM电机1参数Rs(定子电阻)0.000~ 65.535Ω#.###05-07 IM电机1参数Rr(转子电阻)0.000~ 65.535Ω#.###05-08 IM电机1参数Lm(磁通互感量)0.0~ 6553.5mH#.#05-09 IM电机1 参数Lx(总漏感抗)0.0~ 6553.5mH#.#05-10~05-12保留05-13 感应电机2满载电流(A)驱动器额定电流的10~120%#.##05-14 感应电机2 额定功率(kW)0.00~ 655.35kW#.##05-15 感应电机2 额定转速(rpm)0~655351710(60Hz 4极);1410(50Hz 4极)171005-16 感应电机2 极数2~ 4 405-17 感应电机2 无载电流(A)0~参数05-01出厂设定值#.##05-18 感应电机2 参数Rs(定子电阻)0~65.535Ω#.###05-19 感应电机2 参数Rr(转子电阻)0~65.535Ω#.###05-20 感应电机 2 参数Lm(磁通互感量)0~6553.5mH#.#05-21 感应电机2 参数Lx(总漏感抗)0~6553.5mH#.#05-22 感应电机1/电机 2选择1:电机12:电机2105-23 感应电机Y-△切换频率设定0.00~600.00Hz60.0005-24 感应电机Y-△切换致能0:无功能1:致能05-25 感应电机Y-△切换延迟时间0.000~60.000秒0.20005-26 累计电机运转瓦时低字符(W-sec)只读#.#05-27 累计电机运转瓦时高字符(W-sec)只读#.#05-28 累计电机运转瓦时只读 #.#DPD-T_19参数码参数名称设定范围初始值备注(W-Hour)05-29 累计电机运转瓦时低字符(KW-Hour)只读#.#05-30 累计电机运转瓦时高字符(KW-Hour)只读#.#05-31 累计电机运转时间(分钟)00~143905-32 累计电机运转时间(天数)00~6553505-33 选择感应电机或同步电机0: 感应电机1: 同步电机05-34 同步电机满载电流0.00~ 6.00 Amps 0.0005-35 同步电机额定功率0.00~655.35kW 0.0005-36 同步电机额定转速0~65535rpm 200005-37 同步电机极数0~65535 1005-38 同步电机惯量0.0~6553.5kg.m20.005-39 同步电机定子电阻0.000~65.535 0.00005-40 同步电机Ld 0.00~655.35mH 0.00005-41 同步电机Lq 0.00~655.35mH 0.00005-42 同步电机磁极偏移角0.0~360.0度 0.0 05-43 同步电机Ke参数 0~65535(单位: V/1000rpm) 0DPD-T_2006 保护参数参数码参数名称设定范围初始值备注06-00低电压位准460V:Frame A-D机种:300.0~440.0VdcFrame E以上机种(包含):380.0~440.0V360.0400.006-01 过电压失速防止0:无功能460V: 0.0~ 900.0Vdc 760.006-02 过电压失速防止动作选择0:使用传统过电压失速防止1:使用智能型过电压失速防止06-03 加速中过电流失速防止位准一般负载:0~160%(100%对应驱动器的额定电流)重载:0~180%(100%对应驱动器的额定电流)12015006-04 运转中过电流失速防止位准一般负载:0~160%(100%对应驱动器的额定电流)重载:0~180%(100%对应驱动器的额定电流)12015006-05 定速运转中过电流失速防止之加减速选择0:依照目前之加减速时间1:依照第一加减速时间2:依照第二加减速时间3:依照第三加减速时间4:依照第四加减速时间5:依照自动加减速06-06 过转矩检出动作选择OT10:不动作1:定速运转中过转矩侦测,继续运转2:定速运转中过转矩侦测,停止运转3:运转中过转矩侦测,继续运转4:运转中过转矩侦测,停止运转06-07 过转矩检出位准OT110~250%(100%对应驱动器的额定电流)12006-08 过转矩检出时间OT10.1~60.0秒 0.106-09 过转矩检出动作选择OT20:不动作1:定速运转中过转矩侦测,继续运转2:定速运转中过转矩侦测,停止运转3:运转中过转矩侦测,继续运转4:运转中过转矩侦测,停止运转06-10 过转矩检出位准OT210~250%(100%对应驱动器的额定电流)15006-11 过转矩检出时间OT20.1~60.0秒 0.106-12 电流限制0~250%(100%对应驱动器的额定电流)17006-13 电子热电驿 1 选择(电机 1)0:变频专用电机1:标准电机2:无电子热电驿206-14 热电驿 1 作用时间(电机 1)30.0~600.0秒60.006-15 OH过热警告温度准位0.0~110.0℃85.006-16 失速防止限制准位0~100% (参考参数06-03,06-04)5006-17 最近第一异常记录0:无异常记录 0DPD-T_2106-18 最近第二异常记录1:ocA 加速中过电流 0 06-19 最近第三异常记录2:ocd 减速中过电流 0 06-20 最近第四异常记录3:ocn 恒速中过电流 0 06-21 最近第五异常记录4:GFF 接地过电流 0 06-22 最近第六异常记录5:occ IGBT短路保护 06:ocS 停止中过电流7:ovA 加速中过电压8:ovd 减速中过电压9:ovn 恒速中过电压10:ovS 停止中过电压11:LvA 加速中低电压12:Lvd 减速中低电压13:Lvn 恒速中低电压14:LvS 停止中低电压15:OrP 欠相保护16:oH1 (IGBT过热)17:oH2 (散热器过热40HP以上)18:tH1o (TH1 open:IGBT过热保护线路异常)19:tH2o (TH2 open:散热器保护线路异常)20:保留21:oL (超过150%额定电流一分钟后,驱动器过载)22:EoL1 (电子热动电驿1保护动作)23:EoL2 (电子热动电驿2保护动作)24:oH3 (PTC) 马达过热25:保留26:ot1 过转矩 127:ot2 过转矩 228:uC 低电流29:LMIT 归原点遭遇极限错误30:cF1 内存写入异常31:cF2 内存读出异常32:保留33:cd1 U相电流侦测异常34:cd2 V相电流侦测异常35:cd3 W相电流侦测异常36:Hd0 cc电流侦测异常37:Hd1 oc电流侦测异常38:Hd2 ov流侦测异常39:Hd3 occ IGBT短路侦测异常40:AUE 电机参数自动调适失败41:AFE PID反馈断线42:PGF1 PG 回授异常43:PGF2 PG 回授断线44:PGF3 PG 回授失速45:PGF4 PG 转差异常46:PGr1 PG ref输入错误47:PGr2 PG ref断线48:ACE 模拟电流输入断线49:EF 外部错误讯号输入50:EF1 紧急停止DPD-T_2251:bb 外部中断52:Pcod 密码错误53:保留54:CE1 通讯异常55:CE2 通讯异常56:CE3 通讯异常57:CE4 通讯异常58:CE10 通讯 Time Out59:CP10 PU面板 Time out60:bF 煞车晶体异常61:ydc电机线圈Y-△切换错误62:dEb错误63:oSL转差异常64:ryF 电源板电磁开关错误65: PGF5 PG Card错误66~67:保留68:Sensorless 估測轉速方向與命令方向不同69:Sensorless 估测转速超速70:Sensorless 估测转速与命令误差过大71~72: 保留73:S1 外部安全关闸74~78: 保留79: Uoc U相过电流80: Voc V相过电流81: Woc W相过电流82: OPHL U相输出欠相83: OPHL V相输出欠相84: OPHL W相输出欠相85: PG-02U ABZ 硬件断线86: PG-02U UVW 硬件断线87~89: 保留90:内部PLC动作被强制停止100: 保留101:CGdE CANopen软件断线1102:CHbE CANopen软件断线2103:CSYE CANopen同步错误104:CbFE CANopen硬件断线105:CIdE CANopen106:CAdE CANopen107:CFrE CANopen111:InrCOM内部通讯超时错误06-23 异常输出选择 1 0~65535(参考异常讯息bit表)0 06-24 异常输出选择 2 0~65535(参考异常讯息bit表)0 06-25 异常输出选择 3 0~65535(参考异常讯息bit表)0 06-26 异常输出选择 4 0~65535(参考异常讯息bit表)006-27 电子热电驿 2 选择(电机 2)0:变频专用电机1:标准电机2:无电子热电驿206-28 热电驿 2 作用时间(电机 2)30.0~600.0秒60.0DPD-T_2306-29 PTC动作选择0:警告并继续运转1:警告且减速停车2:警告且自由停车3:不警告06-30 PTC 准位 0.0~100.0% 50.0 06-31 故障时频率命令 0.00~655.35Hz 只读06-32 故障时输出频率 0.00~655.35Hz 只读06-33 故障时输出电压值0.0~6553.5 V 只读06-34 故障时直流侧电压值0.0~6553.5 V只读06-35 故障时输出电流值0.00~655.35 Amp 只读06-36 故障时IGBT温度 0.0~6553.5 ℃只读06-37 故障时Heat Sink温度0.0~6553.5 ℃只读06-38 故障时马达的rpm0~65535 只读06-39 故障时转矩命令 0~65535 只读06-40 故障时多功能输入端子状态0000h~FFFFh只读06-41 故障时多功能输出端子状态0000h~FFFFh只读06-42 故障时驱动器状态0000h~FFFFh 只读06-43 保留06-44 保留06-45 侦测输出欠相处置方式(OPL)0:警告并继续运转1:警告且减速停车2:警告且自由停车3:不警告06-46 输出欠相的侦测时间0.000~65.535秒0.50006-47 侦测电流频带 0.00~655.35% 1.0006-48 侦测输出欠相的直流制动时间0.000~65.535秒0.10006-49 保留06-50 输入欠相时间 0.00~600.00秒 0.20 06-51 保留06-52 保留06-53 侦测输入欠相保护之处置方式(OrP)0:警告且减速停车1:警告且自由停车06-54 保留06-55 降载波保护设定0:定额定电流,并依照负载电流及温度限制载波1:定载波频率,并依照设定载波限制负载电流2:定额定电流(同设定0),但关闭电流限制06-56 PT100电压准位10.000~10.000V 5.000 06-57 PT100电压准位20.000~10.000V 7.00006-58 PT100准位1保护频率0.00~600.00Hz0.0006-59 PT處置延遲時間 0~6000秒6006-60 软件侦测GFF电流准位0.0~6553.5 %60.006-61 软件侦测GFF滤波时间0.0~6553.5 %0.1006-62 dEb禁能准位 460V机种: 0.0~440.0 Vdc 360.006-63 故障1发生时的运转时间(天数)0~65535 天数只读DPD-T_2406-64 故障1发生时的运转时间(分钟)0~1439 分钟只读06-65 故障2发生时的运转时间(天数)0~65535 天数只读06-66 故障2发生时的运转时间(分钟)0~1439 分钟只读06-67 故障3发生时的运转时间(天数)0~65535 天数只读06-68 故障3发生时的运转时间(分钟)0~1439 分钟只读06-69 故障4发生时的运转时间(天数)0~65535 天数只读06-70 故障4发生时的运转时间(分钟)0~1439 分钟只读06-71 低电流设定准位0.0 ~ 6553.5 % 0.006-72 低电流侦测时间0.00 ~ 655.35秒 0.0006-73 低电流发生的处置方式0 : 无功能1 : 报警且自由停车2 : 报警依第二减速时间停车3 : 报警且继续运转DPD-T_25DPD-T_2607 特殊参数 参数码 参数名称 设定范围 初始值备注07-00 软件煞车晶体动作准位设定460V 系列:700.0~900.0Vdc760.0 07-01 直流制动电流准位 0~100% 0 07-02 启动时直流制动时间0.0~60.0秒 0.0 07-03 停止时直流制动时间0.0~60.0秒 0.0 07-04 直流制动起始频率 0.00~600.00Hz 0.0007-05 电压上升增益 1~200% 100 07-06 瞬时停电再启动 0:停止运转1:由停电前速度作速度追踪 2:从最小输出频率作速度追踪07-07 允许停电时间 0.1~20.0秒 2.0 07-08 B.B.中断时间 0.1~5.0秒 0.507-09 速度追踪最大电流 20~200% 5007-10 异常再启动动作选择0:停止运转1:当前的速度作速度追踪 2:从最小输出频率作速度追踪07-11 异常再启动次数 0~10 007-12 启动时速度追踪 0:不动作1:从最大输出频率作速度追踪2:由启动时的电机频率作速度追踪3:从最小输出频率作速度追踪07-13 瞬时停电时减速时间选择0:不动作1:第一减速时间 2:第二减速时间3:第三减速时间 4:第四减速时间 5:目前之减速时间 6:自动减速07-14 DEB 回复时间 0.0~25.0秒 0.0 07-15 齿隙加速停顿时间 0.00~600.00秒 0.0007-16 齿隙加速停顿频率 0.00~600.00Hz 0.0007-17 齿隙减速停顿时间 0.00~600.00秒 0.0007-18 齿隙减速停顿频率 0.00~600.00Hz 0.0007-19冷却散热风扇控制方式 0:风扇持续运转1:停机运转一分钟后停止2:随驱动器运转/停止动作3:侦测温度到达约60℃后再启动4:风扇不运转0 07-20 紧急或强制停机的减速方式0:以自由运转方式停止1:依照第一减速时间 2:依照第二减速时间3:依照第三减速时间4:依照第四减速时间 5:系统减速 6:自动减速0 07-21 自动节能设定0:关闭1:开启0 07-22 节能增益 10~1000% 100 07-23 自动调节电压(AVR )0:开启AVR 功能1:关闭AVR 功能 2:减速时,关闭AVR 功能07-24 转矩命令滤波时间(V/F 及SVC 控制模式)0.001~10.000秒 0.05007-25 滑差补偿的滤波时间(V/F 及SVC 控制模0.001~10.000秒0.100。
Schneider VFD(变频电机驱动器)说明书

atv312 manual pdf. Schneider vfd atv320 manual pdf.
Clear Round Flush Button Case - 22 - 3D CAD Date: 2022 February 11 | Written by: Cad Sprog: Udefineret | ) McAdid0002827_2d -Simetric oke (18.7 kb) McAdid0002827_2d -right.dxf Action_download_stroke (13.1 kb) Action_downLoad_stroke_stroke (18.6 kb) Action_download_stroke (12.7 kb) action_side_sidnoad_stroke (12.7 kb) McAdid0002827_2d-Front. noci dxf action_download_stroke (13.1kb) McAdid0002827_2d-ISometric.dwg-down_down-_down -_down -_down -_down -_down -_down-down-down-down-_down -down-down -down -_down -_down -_down -_down- ( 28.7kb)) kb) kb) kb) action_download_stroke (41.2 action_download_stroke (18.6kb) Action_download_stroke (12.7kb) McAdid000 McAdid000 2827_3d instrument .STP Action_downloCircular Flush Knob Boot B'Clear\xc3\x9822-3D-CAD-DATE: February 11. in February 2022. | Schreibt: CAD Explodiert: Udefineret | Version: 1.0 DokumentVerweise: McAdid0002827_3d-CAD Download Action_download_streicheln (18.7 KB) McAdid0002827_2d-Back.dwg Action_download_streicheln (18.7 KB) McAdid0002827_2d-back.dxf affact_strecheln _2d-back.dxf affact_ str echeln _2d-back.dxf affact_strecheln_2d Straße (13 .1 kb) oke (18.5 kb) McAdid0002 827_2d -Bas. dxf Action_download_Stroke (12.5 KB) McAdid0002827_2d-front.dwg action_download_Stroke (18.7 KB) McAdid0002827_2d-front.dxf Action_download_Stroke (13.1 KB) McAdididdddddddding Load_Stroke (28.7 KB) _Download_Stroke (41.2 KB) McAdid000 2827_2d- change .dwg action_download_stroke (18.7 KB) McAdid0002827_2d-changes .dxf action_download_Stroke (13.1 KB) McAdididididididididididididid. dazudufobozumi Oke (18.7 KB) McAdid0002827_2d -right.dxf Action_download_streich (13.1 KB) Action_download_streich (18.6 KB) Action_download_streich (12.7 KB) McAdid0002827_3d -simplified.Stp Action_side_streich (51.8 KB) \ Xc3 \ x982 222 - 3- 3- 3 -3-3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 -3 - 3 -3 -3 -3 -3- 3- 3- 3- 3- 3- 3- 3 - 3D CAD. Action_download_Stroke (18.7 KB) McAdid0002827_2d-back.dwg action_download_Stroke (18.7 KB) McAdid0002827_2d-back.dxf Action_download_Stroke_Stroke (13.1 KB) McAdid0002827_2dbottom.dwg_Stroke_Stroke (18.1 KB) McAdid00028 27_2d-bottom.dwg_Stroke_Stroke 5 kb ) McAdid00028 27_2d -front.dwg action_download_strich (18.7 KB) McAdid0002827_2d-front.dxf action_download_Stroke (13.1 KB) McAdid0002827_2d-ISometrika.dwg Afaction_download_Stroke (28.7 KB) mcadidric.f action_downo.d wload(41,20) 2D to the left. DWG ACTION_DOWNLOAD_STROKE (18.7 KB) McAdid0002827_2d -alternate 6 KB)) action_download_streich (12.7 KB) McAdid0002827_3d-Simplified.StpIn your country or region. pijihohemociza Select a document, white document, article, customized rules and many other downloads. Availability mode Schneider Electric is created contact Schneider Create an electric account Schneider by opening a personal account, creating programs and tools and creating documents. Present our partners reserved for documents and tools. You can search and download 100 products at the same time. Near our world view trailf
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DE-1000™ VFD™Smart CentrifugePart of the Derrick DE-1000™ Centrifuge SeriesDE-1000™ VFD™ SMART CENTRIFUGE P A R T O F T H E D E-1000™S E R I E SThe Derrick DE-1000™VFD™(Variable Frequency Drive) brings a totally new concept in centrifuge operation and control to the market place. The centrifuge offers the ultimate flexibility in system control enabling it to handle a wide range of feed slurries. Automatic load sensing and feed pump control enable automated performance optimization. The bowl assembly can be operated between 0 and 4000 RPM, which can result in an internal centrifugal acceleration of more than 3000 G’s. To accommodate low levels of agitation and rapid solids removal, the conveyor is capable of differential speeds from 1 to 100 RPM. The DE-1000 VFD is mounted on a rugged, portable skid that includes a two point effluent discharge for easy setup. All rotating assembly components are manufactured from corrosion resistant 316 grade and high strength stainless steel alloy materials. Liquid and solid bowl heads are machined from forgings while the bowl and conveyor hubs are constructed from centrifugally cast stock. The drive system consists of two explosion-proof inverter duty motors. The first is a 50 HP motor which is directly connected to the bowl through a 1.4:1 pulley ratio. The second consists of a 10 HP motor which is connected to the conveyor gearbox input pinion shaft.Each motor is powered by a high performance Pulse Width Modulated (PWM) AC drive with Insulated Gate Bipolar Transistor (IGBT) outputs. In turn, each of the motor drives and other peripheral devices are controlled by an environmentally hardened IBM compatible Pentium PC. The PC and all devices communicate through a high-speed, machine level control network.PC control offers unlimited operating flexibility while allowing long term data storage so that critical parameters can be logged into historical trends. In addition, remote monitoring and control of the centrifuge can be accomplished from an adjacent control room or from thousands of miles away. Various configurations are possible, regarding security and read/write capability, and a simple telephone line connection to the onboard high-speed modem or Ethernet connection to a Local Area Network (LAN) can provide multiple users "real-time" machine status information. Remote connection capability has proven to be a powerful tool for troubleshooting and correcting suspected malfunctions without going on-site.The operational methodology of the VFD requires the PC to have complete control over the feed pump through a third AC drive. This enables multiple modes of operation, some being predefined and some being user configurable. Predefined modes consist of typical settings for Solids Removal and Barite Recovery. If these pre-defined settings are not sufficient, custom setups can be saved by the operator and recalled by clicking a single button. Additionally, feed pump control can be automatic or manual. Automatic control, primarily designed for Barite Recovery, maximizes centrifuge throughput by employing a Proportional-Integral-Derivative (PID) loop. This increases feed pump output to the centrifuge until the operator input torque setpoint is reached on either the bowl or the conveyor drive motors. If properties of the feed slurry change, the PID loop will dynamically adjust pump output to maintain the torque setpoint. This enables even less experienced users to safely and effectively operate and monitor this machine.The PC continuously runs a complete diagnostics program which provides the operator with machine critical status information. Real-time trends of main bearing temperature and vibration levels as well as base vibration and enclosure temperature can be viewed on demand. Messages inform the operator when minimum and maximum bowl, conveyor and pump speeds have been reached. In the event alarms or faults do occur, detailed descriptions pinpoint the cause of the malfunction and enable rapid recovery. Coupled with automatic startup and shutdown routines, the DE-1000 VFD Centrifuge is essentially a machine designed for safe, consistent, unattended operation.SYSTEM CHARACTERISTICSCENTRIFUGEBowl size:14” (356 mm) DiameterBowl type:Contour cylinderConveyor:Helical (Radial/Axial)Effluent ports:Variable – EccentricDifferential conveyor speed:1-100 RPMBowl Speed:0-4000 RPM Maximum G’s: 3180Sigma (∑) maximum: 4.34 x 106in2(2800 m2)Electrical:Bowl Drive:50 Horsepower (37 kw) 480VConveyor Drive:10 Horsepower (7.5 kw) 480VPump Drive:15 Horsepower (11 kw) 480V Scroll:System:Counter-currentLead direction:LeftRelated movement to bowl:LaggingPUMPType:Positive displacement progressing cavityCapacity:14 - 200 GPMADV ANT AGES•Suitable for use in Class 1, Division 1, Group “D” areas.•Control system capable of both local and remote control.•Critical temperature and vibration points continuously monitored –allowing for planned maintenance.•Bowl/scroll drive and control systems built onto skid.•Higher throughput/efficiency with direct feed pump control.•Automatic cleaning cycle initiated during routine shutdown.•Higher operating torque capacity.•Direct RPM and torque readouts for bowl and conveyor drive motors.•Direct GPM readout for positive displacement feed pump.•Troubleshooting and maintenance time significantly reduced with online help screens.•Integrated pump, complete with a fixed ratio gearbox and variable speed motor.•Investment cast stellite #12 wear inserts, case plows and feed accelerator•Reversible conveyor feed nozzles with replaceable tungsten carbide liners•Conveyor tiles with 93.3 “A” Rockwell scale average hardness installed over the full length of the conveyorOPTIONS LISTS•Conveyor Type: Radial flow or Axial flow.•Conveyor Wear Surfaces: Tungsten carbide tiles or hard surface alloy.•Automatic control of fresh water into feed line for slurry dilution or cleanout during shutdown.•Available without enclosure purge system for use in non-hazardous areas.•Electrical Configurations: 380/460 VAC – 50/60 Hz.The individual components of the DE-1000 are dynamically balanced to exceed the ISO 1940balance quality grade of G-1.0. The total assembly easily exceeds the G-2.5 quality standard.Rugged PC can be operated locally orremotely via Local Area Network (LAN)or analog phone line.Stainless steel bowl and cover are extremelydurable and easy to clean and maintain.Replaceable wear inserts and case plows,designed to protect your investment,are matched for simple field replacement.The adjustable effluent ports provide forfast precise pond depth configuration.Axial flow conveyor (top) andRadial flow conveyor (bottom)provide different levels ofagitation in removing solids.Height:71 13/16” (1824 mm)Width:80” (2032 mm) – Lid closed 87 11/16” (2227 mm) – Lid openFeed Height:40 1/4” (1022 mm)Length:129 7/16” (3287 mm)Weight:9,800 lbs (4449 kg)DEC/VFD- 10/01©2001 Derrick Corporation. All rights reserved. All products indicated by trademark symbols are trademarked and/or registered by Derrick Corporation.IBM is a trademark of IBM Corporation. Pentium is a trademark of Intel Corporation. DIMENSIONS15630 Export Plaza Drive • Houston, Texas 77032Toll Free: (866) DERRICK • Phone: (281) 590-3003Fax: (281) 442-6948 • E-mail:derrick@®Serving our customers worldwide: G-Force as a Function of Bowl Speed on a 14” Diameter BowlS PEED (RPM)A CCELERATION(G ’S )DE-1000™ VFD™ SMART CENTRIFUGE。