基于运动想象脑电信号分类的上肢康复外骨骼控制方法研究
上肢外骨骼康复机器人控制系统研究
上肢外骨骼康复机器人控制系统研究由于我国60岁以上老年人口增加、人们饮食习惯的改变等诸多原因,脑卒中发病率在我国大大提高,而术后的脑卒中患者存在着偏瘫等后遗症,需要进行运动康复训练恢复其身体机能。
但我国存在着康复治疗医院稀少,正规的康复理疗师数目不足等问题,故短缺的康复治疗资源与患者的运动康复需求这对矛盾日益彰显。
随着机器人技术、检测技术、无线通讯等技术的高速发展与成熟,利用康复机器人牵引患者患肢进行康复运动不仅可以减省人力,使患者得到专业护理,还可以采集运动数据,给出康复效果的客观评价。
本文针对偏瘫患者的上肢运动康复需求,研究设计了人机共融交互性好的上肢外骨骼康复机器人控制系统,其主要包括机器人执行机构、驱动机构、上层主控计算机、底层运动控制器、传感器模块、生理指标检测模块、能源模块等,该康复机器人可感知运动意图,具有良好的人机界面,能完成患者信息采集、方案制定、运动控制等任务,并设置保护措施,满足代替人工方式对偏瘫患者上肢进行锻炼的需要。
本文主要研究与工作内容如下:(1)系统组成设计。
通过对上肢康复机器人的国内外目前先进技术的研究与分析,结合本课题上肢外骨骼康复机器人的需求和指标,完成了机器人的系统组成设计。
参照人体上臂臂长参数和活动关节角度,设计上肢外骨骼康复机器人为主从双臂同型同构各五自由度形式,进一步根据控制系统需求,完成了控制架构和电机等硬件选型的设计。
(2)运动模型分析。
通过齐次坐标变化下的人体上肢模型,利用蒙特卡洛算法,得到人体上肢末端腕部的活动空间;建立康复机器人D-H运动模型,通过计算得到机器人运动学正、逆解析式,并对其进行了仿真得到机械臂模型与康复机器人末端腕部活动空间,验证了所设计的机器人活动范围与人体上肢活动范围基本一致,符合需求;进而对机器人训练臂康复轨迹进行规划,使训练轨迹平滑柔顺,为控制问题打下运动学基础。
(3)主从训练方法设计。
设计多种运动锻炼模式以满足不同偏瘫患者的需求;为提高人机共融性设计了一种基于模糊逼近的主从训练控制方法,使患者患肢可根据健康侧肢体运动意图进行双臂协同训练,主从训练控制器的稳定性通过Lyapunov函数验证,并进行仿真验证方法效果,保证了从臂跟随主臂的康复运动效果。
运动想象脑电信号的分类研究
大脑控制着人类 的思维 、 情感和运 动, 是一切人类 活动 的
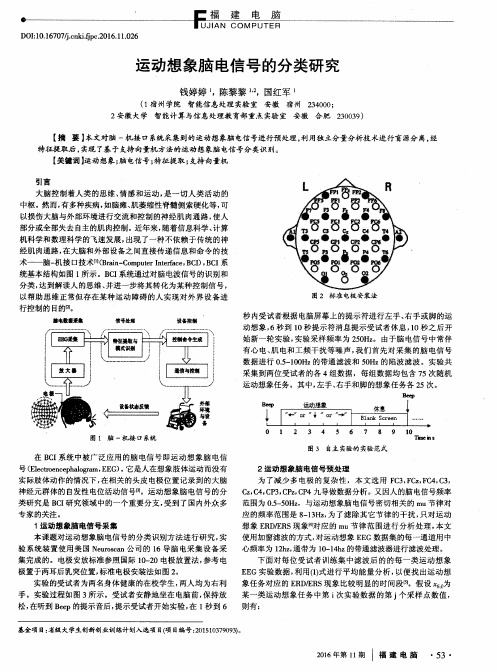
中枢 。然而, 有多种疾病 , 如脑瘫、 肌萎缩性脊髓侧索硬化等 , 可 以损伤大脑与外部环境进行交流和控制 的神经肌 肉通 路 , 使人 部分或全部失去 自主的肌 肉控制 。 近年来, 随着信息科学 、 计算 机科 学和 数理科学 的飞速发展 , 出现 了一种不依赖于传统 的神 经肌 肉通路 , 在大脑和外部设备之间直接 传递信息和命令 的技 术——脑一 机接 口技术f 1 】 ( B r a i n — C o m p u t e r I n t e r f a c e , B C I ) , B C I 系 统基本结构如图 1 所示 。B C I 系统通过对脑 电波信号 的识别和 分类 , 达到解读人的思维、 并进一步将其转化为某种控制信 号, 以帮助思维正常但 存在某种运动 障碍的人实现 对外界 设备进
行 控 制 的 目的1 2 1 。
奠电鞠 采囊 信号处理 设备控镧
图 2 标 准 电极 安 装 法
秒 内受试者根据 电脑屏幕上 的提示符进行左手 、 右手或脚 的运 动想象 , 6秒到 1 0秒提 示符消息提示受试者休息 , 1 0秒之后 开
始新一轮实验 , 实验采样频 率为 2 5 0 H z 。由于 脑 电信号 中常 伴
专家的关注。 2运 动 想 象脑 电信 号预 处 理 为 了减 少 多 电极 的 复 杂 性 , 本 文 选 用 F C 3 , F C z , F C 4 , C 3 ,
C z , C 4 , C P 3 , C P z , C P 4九导做数据分析。又 因人的脑 电信号频率 范 围为 0 . 5 — 5 0 Hz ,与运动想象脑电信 号密切相关 的 mu节律 对 应 的频率范 围是 8 - 1 3 H z , 为 了滤 除其 它节律 的干扰 , 只对运 动 想象 E R D 厄R S现象 对应 的 m u节律 范 围进行 分析处理 , 本 文 使用加 窗滤波的方式, 对运动想象 E E G数据集的每一通道用 中 心频率 为 1 2 h z , 通带为 1 0 — 1 4 h z 的带通滤波器进行滤波处理 。
基于运动想象的脑电信号分类算法的研究与实现

基于运动想象的脑电信号分类算法的研究与实现脑电信号分类算法是指通过对脑电信号进行处理和分析,识别出不同种类的脑电活动模式。
在临床医学和神经科学研究领域中,脑电信号分类算法得到了广泛的应用。
运动想象是指通过想象不同的运动动作来产生相应的脑电信号,从而实现对运动想象的分类。
本文将介绍基于运动想象的脑电信号分类算法的研究与实现。
一、算法原理主要基于脑电信号的特征提取和分类器的设计实现,具体步骤如下所示。
1.数据获取和预处理通过脑电机头带将受试者的脑电信号采集下来,并对采集的信号进行滤波和降噪处理,以提高信号的质量。
2.特征提取运动想象产生的脑电信号具有一定的时域和频域特征,可以通过信号处理技术对其进行提取。
包括时域特征和频域特征两类。
时域特征包括平均值、方差、偏度、峰度等;频域特征包括功率谱密度、自适应滤波器等。
3.分类器设计将提取出的特征作为输入,通过机器学习算法进行分类,主要包括支持向量机、神经网络、朴素贝叶斯等算法。
二、实验设计本文的实验是基于运动想象产生的脑电信号分类实现的。
一共邀请了6名受试者参与实验,其中3名为男性,3名为女性,年龄在20岁到30岁之间。
参与者需要在将左右手和双脚想象成运动状态并保持想象10秒钟,共进行了300次实验。
对于脑电信号的采集,使用了Emotiv公司的EOP-01脑电机头带,采样频率为256Hz。
对采集到的信号进行滤波和降噪处理,取出采集的信号中频率在8Hz到30Hz之间的信号。
对提取出来的特征进行归一化处理,保证所有特征在相同的尺度上进行比较。
使用了神经网络算法进行分类,网络结构为3层,其中输入层为特征层,隐层为5个节点,输出层为4个节点,分别代表左手、右手、左脚和右脚的分类。
实验结果表明,该算法能够实现对运动想象的分类,分类精度达到了90%以上。
三、结论。
外骨骼神经控制技术研究

外骨骼神经控制技术研究自从外骨骼技术的出现以来,对身体残缺者来说是一大福音。
通过外骨骼的助力,曾经无法独立行动的人能够恢复到基本生活自理的能力,甚至可以重新踏入工作岗位。
但是,目前外骨骼的操控还是需要外部的电脑进行控制,对于使用者来说还是有一定的不便之处。
这时,外骨骼神经控制技术的研究就显得尤为重要了。
现在的外骨骼有时需要使用者通过按钮操作才能运作,这样操控起来还是比较复杂的,而且使用者的身体状态必须要达到特定的要求才能操纵外骨骼。
而神经控制的外骨骼就可以通过使用者的大脑信号进行革命性的操控。
但是神经控制外骨骼技术的研究要解决的问题也不少。
首先就是如何获取使用者大脑信号的技术,而这种技术在目前还没有取得突破性进展。
如何精确地解析大脑信号,对外骨骼进行准确的操控,也是一个亟待解决的难题。
此外,神经控制外骨骼还需要克服计算复杂度的问题,比如需要人工智能等高度配合的技术才能够稳定可靠地运行起来。
目前的研究中,早期开展了对使用者大脑信号的研究,利用不同的成像技术,在找到激活大脑的具体区域之后,尝试设计与之对应的操控命令,以此来操纵外骨骼。
除此之外,还有利用肌电信号等方法来进行控制的研究,相比大脑信号等方法,在成本和运行时间等方面都有一定的优势。
随着研究的不断深入,神经控制外骨骼的应用前景也越来越受到人们的关注。
一些领先的科技公司已经开展了相关的研究,比如惠普、微软、康奈尔大学等。
他们都认为,神经控制外骨骼技术对人类社会的发展将具有重要意义,而且这种技术也会对残疾人士的生活产生重要影响。
对于残疾人士而言,神经控制外骨骼技术的研究将为他们带来更大的希望。
通过神经控制,使用者完全可以通过大脑信号来操纵外骨骼,使其更加得心应手、灵活运转。
对于身体残缺者而言,外骨骼的神经控制技术能够使他们重获自主行动的能力,重新融入社会。
同时,这种技术的研究也对医学科技发展带来了重要的启示,为未来的医学科技应用提供了充足的动力。
基于semg信号的外骨骼式机器人上肢康复系统

研究现状与发展趋势
现状
目前,国内外对于基于semg信号的外骨骼式机器人上肢康复系统研究尚处于 初级阶段,相关技术和算法还不够成熟,但已有一些初步的研究成果和实际应 用案例。
发展趋势
随着人工智能、机器学习等技术的不断发展,基于semg信号的外骨骼式机器人 上肢康复系统将会得到更加广泛的应用和研究,技术也将更加成熟和可靠。未 来,该技术有望成为上肢康复治疗的重要发展方向之一。
系统性能评估与优化
01
02
03
评估指标设定
设定系统性能评估指标, 如信号采集时间、信号稳 定性、动作识别准确率等 。
算法优化
优化信号处理算法,提高 信号稳定性,降低噪声干 扰。
动作识别精度提升
改进动作识别算法,提高 上肢动作识别的准确率。
传感器布置与信号质量改进
传感器选型
选择适合的semg传感器,考虑其分辨率、灵敏度和稳定性。
运动协同控制
结合外骨骼式机器人的结构和运动 特性,设计合适的协同控制策略, 实现人机运动协同,提高康复效果 。
系统的人机交互与协同控制
人机交互界面设计
设计简洁、易用的交互界面,提 供自然、直观的运动指令输入方 式,如语音识别、手势识别等。
实时反馈与调整
通过传感器实时监测上肢运动状 态和外骨骼式机器人的运动轨迹 ,提供实时反馈和调整指令,确
应用
在上肢康复领域,外骨骼式机器人可 用于辅助患者进行手臂运动训练,提 高手臂的运动能力和减少疼痛。
系统架构与工作原理
系统架构
基于SEMG信号的外骨骼式上肢康复系统包括SEMG信号采集模块、信号处理模 块、外骨骼式机器人控制模块和人机交互模块。
工作原理
通过采集患者的SEMG信号,信号处理模块提取出肌肉活动的特征信息,并将其 传递给外骨骼式机器人控制模块。控制模块根据接收到的信号指令调整机器人的 运动状态,并与患者的人体交互实现上肢的运动辅助训练。
利用想象运动脑电波产生康复训练器械控制命令的方法[发明专利]
![利用想象运动脑电波产生康复训练器械控制命令的方法[发明专利]](https://img.taocdn.com/s3/m/c63a1668cc22bcd127ff0cb2.png)
专利名称:利用想象运动脑电波产生康复训练器械控制命令的方法
专利类型:发明专利
发明人:高上凯,高小榕,张志广,洪波
申请号:CN200510126359.4
申请日:20051208
公开号:CN1803122A
公开日:
20060719
专利内容由知识产权出版社提供
摘要:本发明属于肢残人康复医疗器械技术领域,其特征在于该方法依次含有以下步骤:将脑电电极放置在头皮上与大脑运动感觉皮层对应的位置;用通用的脑电信号采集与模数转换装置实时地记录受试者的脑电信号并送入计算机;计算受试者在想象运动前后各电极处的脑电能量差值;根据能量差最大的电极位置,判断出受试者想象运动的类别;根据想象运动类别与预先设定好的多套康复训练程序的对应关系,启动通用的康复训练器械的相应控制单元和预设的控制程序,带动受试者肢体或身体其他部位进行康复训练。
本方法通过脑电实时提取患者的主动意愿,按照康复训练的运动再学习理论,在训练效果上与被动训练方法相比具有较大优势。
申请人:清华大学
地址:100084 北京市北京100084-82信箱
国籍:CN
更多信息请下载全文后查看。
运动想象疗法结合运动诱发电位在脑梗死康复中的应用研究

运动想象疗法结合运动诱发电位在脑梗死康复中的应用研究【摘要】目的:探讨运动想象疗法对脑卒中偏瘫患者上肢运动功能和日常生活活动( ADL)能力的影响。
方法:采用随机病例对照方法。
60 例脑卒中患者随机分为治疗组和对照组, 治疗组用运动想象疗法进行干预。
6 周后,用Fugl-Meyer 运动功能评分法和改良巴氏指数评定患者的上肢运动功能和 ADL 能力,运动诱发电位(MEP) 潜伏期及中枢运动传导时间(CMCT)进行动态病情监测。
结果:治疗组与对照组之间的FMA 和 MBI 值比较差异有统计学意义( P<0.01 ),两组运动诱发电位(MEP) 潜伏期及中枢运动传导时间(CMCT)改善有统计学意义。
结论:运动想象疗法可明显地促进脑卒中偏瘫患者上肢运动功能和 ADL 能力。
运动诱发电位(MEP) 潜伏期及中枢运动传导时间(CMCT)可用于动态监测病情变化和评价康复效果。
【关键词】脑梗死;运动想象;运动诱发电位;日常生活活动能力;康复运动想象疗法( motor imagery therapy)是指为提高运动功能而进行的反复运动想象,没有任何运动输出,根据运动记忆在大脑中激活某一活动的特定区域,从而达到提高运动功能的目的[1]。
近年来,该疗法成为脑卒中康复治疗领域的热点。
本研究对运动想象疗法进行病例对照比较分析,探讨运动想象疗法对脑卒中偏瘫患者上肢功能的及日常生活活动能力影响。
并以磁刺激仪测量运动诱发电位(MEP) 潜伏期及中枢运动传导时间(CMCT),以动态监测病情变化,为脑卒中预后判断提供客观依据。
1资料与方法1.1 研究对象2018年1月-2020年3月在海南省人民医院康复医学科住院的脑卒中患者60例。
按随机化原则随机分为对照组(常规康复干预组)与治疗组(常规康复干预加运动想象疗法组),每组30例。
⑴病例入选标准:①诊断符合1995年全国第四次脑血管病学术会议制定的诊断标准;②年龄40~80岁;③初次发病,病程<4周;经脑CT或MRI证实;④生命体征稳定,疾病症状不再进展持续48小时以上;⑤不伴理解困难、痴呆、严重心脑肾功能不全及精神病等。
基于运动想象脑电信号的运动康复训练系统研究

摘要在没有躯体运动的情况下,根据记忆在思维中排练特定动作的动态过程称为运动想象(Motor Imagery,MI)。
运动想象脑-机接口(Brain-Computer Interface,BCI)是指通过在大脑中想象特定运动,来与计算机通讯或控制外部设备,该技术有助于瘫痪、脑卒中患者的肢体康复。
研究显示,随着运动想象任务的增加,分类正确率也会有所降低,针对多类运动想象的研究十分必要。
本文在研究了基于共空间模式(Common Spatial Pattern,CSP)的特征提取算法和基于萤火虫(Firefly Algorithm,FA)的特征选择算法的基础上,提出了相应的改进算法,设计并实现了一个基于运动想象信号的运动康复训练系统。
主要研究工作如下:(1)针对共空间模式未能提取时频域特征的问题,在共空间模式CSP算法的基础上,结合局部特征尺度分解(Local Characteristic-scale Decomposition,LCD),提出了一种新的特征提取算法。
首先,选择部分脑电信号通道进行LCD 分解,得到一系列ISC分量,然后整合该ISC分量和脑电信号,提取并融合其空域和时频域特征,最后对四类运动想象脑电信号进行分类。
实验结果表明,该方法有效提取了时频域和空域信息,提高了运动想象任务的分类正确率。
(2)针对特征提取过程中存在特征冗余、特征维度高的问题,结合萤火虫算法和学习自动机(Learning Automata,LA),提出了一种特征选择算法,该算法能够有效优化特征提取形成的高维向量空间。
实验结果表明,与遗传算法(Genetic Algorithm,GA)、自适应权值粒子群算法(Adaptive Weight Particle Swarm Optimization Algorithm,APSO)相比,该算法有效降低了特征维度,剔除冗余特征,同时提高了脑电信号的分类正确率,验证了该算法的有效性。
《2024年运动想象脑电分析方法研究》范文

《运动想象脑电分析方法研究》篇一一、引言随着神经科学和认知科学的不断发展,运动想象在脑功能研究中的应用越来越受到关注。
运动想象,即个体在大脑中模拟运动过程而不实际执行运动,对于理解人类运动控制、康复医学以及神经工程等领域具有重要意义。
脑电分析方法作为研究运动想象的有效手段,能够提供丰富的神经电生理信息,从而揭示运动想象的神经机制。
本文旨在研究运动想象脑电分析方法,为相关领域的研究提供理论依据和技术支持。
二、研究背景及意义运动想象脑电分析方法的研究,有助于我们了解大脑如何处理运动信息,以及在运动控制中的作用。
在康复医学领域,运动想象训练已被广泛应用于脑损伤、脊髓损伤、帕金森病等患者的康复治疗。
通过对运动想象脑电信号的分析,可以评估训练效果,为个体化康复治疗提供依据。
此外,该研究还有助于揭示人类运动控制的神经机制,为神经工程和仿生机器人等领域提供理论支持。
三、研究方法本研究采用脑电信号分析方法,结合运动想象实验,对参与者的脑电数据进行采集、处理和分析。
具体步骤如下:1. 实验设计:设计运动想象实验,包括想象肢体运动和想象非肢体运动两种类型。
2. 数据采集:使用脑电仪采集参与者的脑电信号。
3. 数据预处理:对采集的脑电数据进行预处理,包括滤波、去噪、基线校正等操作。
4. 特征提取:从预处理后的脑电数据中提取与运动想象相关的特征,如功率谱密度、事件相关电位等。
5. 统计分析:对提取的特征进行统计分析,比较不同类型运动想象的脑电差异。
6. 结果解释:根据统计分析结果,解释运动想象的神经机制。
四、实验结果与分析1. 实验结果通过实验,我们获得了参与者在想象肢体运动和想象非肢体运动时的脑电数据。
通过对数据的预处理和特征提取,我们得到了与运动想象相关的特征参数。
2. 结果分析通过对特征参数的统计分析,我们发现想象肢体运动和非肢体运动的脑电信号在多个脑区存在显著差异。
这表明不同类型的运动想象在大脑中的处理过程有所不同,涉及到不同的脑区和神经机制。
《2024年运动想象脑电分析方法研究》范文
《运动想象脑电分析方法研究》篇一一、引言随着神经科学技术的不断进步,脑电分析技术已经逐渐成为了解大脑功能的一种重要手段。
其中,运动想象脑电分析方法,是一种针对脑部活动中的运动区域进行分析的特殊方法,主要针对人体在进行某种特定动作或动作序列想象时的大脑活动进行分析。
本文将详细介绍运动想象脑电分析方法的研究背景、目的和意义。
二、研究背景及意义运动想象脑电分析方法,是近年来神经科学领域中一个重要的研究方向。
通过这种方法,我们可以了解大脑在运动想象过程中的活动模式,从而更好地理解大脑的运动控制机制。
此外,该方法在康复医学、神经工程、运动科学等领域具有广泛的应用前景,如帮助残疾人恢复运动能力、优化运动员的训练方式等。
三、研究方法本研究采用的运动想象脑电分析方法主要包括以下几个步骤:1. 数据采集:通过脑电图(EEG)设备采集受试者在进行运动想象时的脑电信号。
2. 数据预处理:对采集到的脑电信号进行滤波、去噪等预处理,以提高数据质量。
3. 特征提取:从预处理后的数据中提取出与运动想象相关的特征,如事件相关电位(ERP)等。
4. 统计分析:对提取出的特征进行统计分析,以了解不同运动想象任务下的大脑活动模式。
5. 结果解读:根据统计分析结果,解读大脑在运动想象过程中的活动模式和机制。
四、实验结果与分析通过实验,我们得到了不同受试者在执行不同运动想象任务时的脑电信号数据。
通过对这些数据的分析,我们发现在进行运动想象时,大脑的某些区域会表现出明显的活动变化。
例如,当受试者想象进行某种特定动作时,大脑的运动皮层区域会表现出明显的电位变化。
此外,我们还发现不同受试者在执行相同任务时的大脑活动模式存在差异,这可能与个体的生理特征、经验等因素有关。
五、讨论与展望运动想象脑电分析方法为研究大脑的运动控制机制提供了一种新的手段。
然而,该方法仍存在一些局限性,如数据采集的复杂性、数据分析的难度等。
为了进一步提高该方法的应用效果,我们需要从以下几个方面进行深入研究:1. 提高数据采集的准确性:采用更先进的脑电图设备和技术,以提高数据采集的准确性和可靠性。
康复机器人结合运动想象疗法对脑卒中患者上肢运动功能康复的效果

康复机器人结合运动想象疗法对脑卒中患者上肢运动功能康复的效果目录1. 内容概括 (2)1.1 研究背景 (2)1.2 研究目的 (3)1.3 研究意义 (4)2. 文献综述 (5)2.1 脑卒中概述 (6)2.1.1 脑卒中的定义与分类 (8)2.1.2 脑卒中的发病机制 (8)2.2 上肢运动功能的康复方法 (9)2.2.1 传统康复方法 (11)2.2.2 现代康复方法 (11)2.3 康复机器人与运动想象疗法的结合 (13)3. 研究方法 (14)3.1 研究对象 (15)3.2 康复机器人的选择与配置 (16)3.2.1 康复机器人的类型 (17)3.2.2 康复机器人的功能模块 (18)3.3 运动想象疗法的实施 (19)3.3.1 运动意象训练步骤 (21)3.3.2 意象训练内容 (22)4. 试验设计 (24)4.1 试验分组 (24)4.1.1 对照组 (25)4.1.2 实验组 (26)4.1.3 入选标准 (27)4.1.4 排除标准 (28)4.2 治疗程序 (28)4.2.1 实验前治疗概况 (30)4.2.2 治疗过程中的监控与记录 (31)5. 结果分析 (32)5.1 数据收集与整理 (33)5.1.1 运动功能测试结果数据 (34)5.1.2 意象训练期间的数据记录 (35)5.2 数据分析与评估 (35)5.2.1 实验组与对照组上肢运动功能恢复比较 (37)5.2.2 意象训练前后运动功能评估 (38)1. 内容概括本研究旨在探讨康复机器人结合运动想象疗法对脑卒中患者上肢运动功能康复的效果。
通过对脑卒中患者进行为期8周的运动想象疗法和康复机器人结合治疗,观察患者的上肢运动功能恢复情况。
研究结果表明,康复机器人结合运动想象疗法能够显著提高脑卒中患者上肢运动功能的康复效果,促进神经功能的恢复,为脑卒中患者的康复提供有效的辅助治疗方法。
1.1 研究背景脑卒中,是全球范围内造成残疾的主要原因之一,其发病率、致残率和死亡率均居高不下。
《2024年运动想象脑电分析方法研究》范文

《运动想象脑电分析方法研究》篇一一、引言随着神经科学和认知科学的不断发展,运动想象在脑电研究中的应用日益广泛。
运动想象是脑功能中重要的一环,可以揭示个体在进行某种动作想象时的神经机制,并应用于多种疾病如运动障碍和脑部疾病的康复训练。
近年来,通过对运动想象过程的脑电信号进行分析,我们能够更好地了解人脑如何对运动进行规划、控制和想象。
因此,对运动想象脑电分析方法的研究具有非常重要的理论和实践意义。
二、运动想象与脑电信号运动想象是指个体在大脑中形成某种动作的视觉或运动感觉的图像,而不需要实际的动作执行。
在运动想象过程中,人脑会产生相应的脑电信号,这些信号包含了丰富的关于运动想象的信息。
通过对这些脑电信号的分析,我们可以深入了解运动想象的神经机制。
三、脑电分析方法概述当前的运动想象脑电分析方法主要包括以下几个方面:信号预处理、特征提取、分类分析和结果解释。
首先,通过信号预处理技术去除噪声,提取出有效的脑电信号;其次,利用特征提取技术从预处理后的信号中提取出与运动想象相关的特征;然后,通过分类分析技术对提取的特征进行分类和识别;最后,根据分类结果解释运动想象的神经机制。
四、运动想象脑电分析方法研究进展近年来,随着神经科学和计算机科学的不断发展,运动想象脑电分析方法取得了显著的进展。
一方面,研究人员开发了多种先进的信号预处理和特征提取技术,如独立成分分析、小波变换等,有效地提高了脑电信号的信噪比和特征提取的准确性。
另一方面,机器学习和人工智能技术的发展为运动想象的分类和识别提供了新的思路和方法。
例如,深度学习技术可以自动学习和提取脑电信号中的特征,提高了分类的准确性和稳定性。
此外,研究人员还结合了多种分析方法,如频域分析和时域分析,以更全面地揭示运动想象的神经机制。
五、典型案例分析以某项研究为例,研究人员要求受试者在进行某项运动想象的同时记录其脑电信号。
通过上述的预处理、特征提取和分类分析等方法,研究人员成功地识别出了受试者在不同阶段和不同类型的运动想象时的脑电特征。
《2024年度运动想象脑电分析方法研究》范文

《运动想象脑电分析方法研究》篇一一、引言随着神经科学和认知科学的不断发展,运动想象在脑功能研究中的应用越来越受到关注。
运动想象指的是在心理层面上对运动的思考和想象,虽然这种运动并未在物理层面发生,但却与大脑的运动控制机制密切相关。
运动想象脑电分析方法研究就是基于这一现象,通过分析脑电信号(EEG)来研究大脑在运动想象过程中的活动模式和机制。
本文旨在探讨运动想象脑电分析方法的研究现状、方法及潜在应用。
二、研究现状近年来,运动想象脑电分析方法在神经科学领域得到了广泛的应用。
通过脑电信号的采集和分析,研究者可以了解大脑在运动想象过程中的活动模式,进而探究大脑运动控制机制的相关原理。
然而,目前关于运动想象脑电分析方法的研究还存在诸多不足。
如分析方法的不统一、研究结果的可比性较差等。
因此,进一步探索和发展更为精确的运动想象脑电分析方法具有重要的科学意义和实践价值。
三、方法概述(一)数据采集在进行运动想象脑电分析时,首先需要采集被试者的脑电信号。
通常采用非侵入式脑电技术,如干电极或湿电极技术,将电极放置在头皮上,以记录大脑的电活动。
在采集过程中,需要确保被试者处于安静、放松的状态,并按照要求进行运动想象任务。
(二)数据分析在完成数据采集后,需要进行数据预处理和特征提取。
预处理主要包括去噪、滤波等操作,以消除无关因素的干扰。
特征提取则是从预处理后的数据中提取出与运动想象相关的特征信息,如事件相关电位(ERP)等。
随后,采用统计分析和机器学习方法对提取的特征进行分类和识别。
(三)结果解读通过对运动想象脑电数据的分析,可以了解大脑在运动想象过程中的活动模式和机制。
根据不同的任务类型和难度水平,大脑的激活区域和激活程度也会有所不同。
因此,通过解读和分析这些数据,可以进一步揭示大脑的运动控制机制和相关原理。
四、研究方法及实例分析以一项关于手部运动想象的研究为例,采用干电极技术采集被试者的脑电信号。
在实验过程中,被试者需要按照要求进行手部运动想象的任务,如想象自己正在用手指进行抓握动作等。
基于脑电信号的上肢运动学参数解析及应用研究
基于脑电信号的上肢运动学参数解析及应用探究摘要:随着社会老龄化和科技进步,越来越多的人因为各种疾病或是意外事故导致了上肢肌力、肌张力以及精细运动的障碍。
而上肢功能障碍的患者在生活中的自理能力、工作能力以及生活质量都会受到很大的影响。
因此,本文结合神经科学和运动学,提出了接受脑电信号进行上肢运动学参数解析及应用的方法。
本文的探究重点在于将传统的脑电信号处理方法与运动学参数计算方法相融合,提出了一种基于深度进修的上肢运动学参数解析及应用的新方法。
为了验证该方法的可行性,我们进行了一系列试验,试验结果表明该方法不仅可以有效地检测上肢特定动作的发生,而且可以提取出上肢运动学参数,并且可应用于多种临床场景中,如康复训练、肢体运动控制等。
在将来的探究中,我们将继续深度探讨该方法在多种肢体运动控制方面的应用,力求打造出更加完整和高效的肢体运动控制系统。
关键词:脑电信号;上肢运动学参数;深度进修;运动控制;肢体康。
1. 探究背景及意义随着人口老龄化以及科技进步,上肢功能障碍患者的数量越来越多。
上肢功能障碍包括肌力、肌张力以及精细运动的障碍,这些障碍会对患者的生活产生分外大的影响,例如自理能力、工作能力以及生活质量等等。
因此,如何有效地进行康复训练以提高患者的上肢功能成为了亟待解决的问题。
而传统的康复训练方法大多是基于物理治疗,例如康复训练器等,这些方法无法针对个体差异进行个性化治疗,同时也无法全方位地了解患者的状况。
因此,一些新的康复训练方法和技术逐渐得到了应用。
2. 脑电信号及其应用脑电信号是一种生物电信号,包含了大量关于大脑活动的信息。
在近年来,脑机接口技术越来越受到关注,利用脑电信号进行运动控制等方面的探究也越来越普遍。
利用脑电信号进行运动控制的基本原理是,通过记录人脑在进行特定运动时的电信号,从而控制外部设备实现相应的运动。
这方面的探究有浩繁,例如运用脑电信号控制假肢、控制轮椅等。
而本文的探究重点在于利用脑电信号进行上肢运动学参数的解析及应用。
《2024年运动想象脑电分析方法研究》范文
《运动想象脑电分析方法研究》篇一一、引言运动想象,指的是在没有实际执行的情况下,人们脑海中模拟动作和动作执行的过程。
近年来,随着神经科学和脑电技术的不断发展,运动想象脑电分析方法逐渐成为研究人类运动认知和神经机制的重要手段。
本文旨在探讨运动想象脑电分析方法的研究现状、技术手段及其应用,并尝试从不同的角度解析这一研究领域的深层次问题。
二、运动想象脑电分析方法的理论基础脑电图(EEG)技术是一种通过电极捕捉脑部神经细胞电信号的电生理学技术。
而运动想象时,特定脑区的电信号会产生特定的变化,从而可以被EEG技术捕捉和记录。
在神经生理学上,大脑运动区(包括初级运动皮层和次级运动皮层)是负责动作计划、控制和想象的区域,其电信号的波动在一定程度上可以反映个体对运动的认知和计划。
三、研究现状与技术手段当前,关于运动想象脑电分析的研究主要集中在两个方面:一是脑电信号的预处理与特征提取;二是脑机交互的应用。
1. 脑电信号的预处理与特征提取:对于运动想象的脑电信号,其预处理主要包括数据清洗、噪声去除、独立成分分析等步骤。
特征提取则是通过算法对预处理后的数据进行处理,提取出与运动想象相关的特征信息,如事件相关电位(ERP)等。
2. 脑机交互的应用:随着脑机交互技术的不断发展,运动想象脑电分析在辅助诊断、康复训练等领域有着广泛的应用前景。
例如,通过对脑电信号的监测和分析,可以帮助医生判断患者的运动认知障碍;同时,将患者的意图信息通过计算机或其他设备转换为动作或操作,为患者提供一种新的康复训练方式。
四、研究方法与实验设计在研究方法上,通常采用基于EEG的信号处理技术和机器学习算法进行运动想象脑电信号的分析。
在实验设计上,一般要求受试者在进行特定动作的想象过程中进行脑电信号的记录,随后通过对信号的分析提取出相关特征,进一步利用统计分析等手段进行评估。
同时,需要严格控实验环境和操作步骤的规范程度以确保结果的准确性和可靠性。
五、研究结果与讨论通过对大量实验数据的分析,我们可以发现:在运动想象过程中,大脑特定区域的电信号会呈现出特定的模式和特征。
基于运动想象脑机接口的脑卒中患者康复外骨骼设计与研究

基于运动想象脑机接口的脑卒中患者康复外骨骼设计与研究宋鲁豫;赵一玮
【期刊名称】《鞋类工艺与设计》
【年(卷),期】2024(4)8
【摘要】本文基于神经可塑性理论,旨在设计并实现一款结合MI-BCI的脑卒中上肢外骨骼的康复设备,以提升患者和医护双方的使用体验,提升康复效率。
本文从现有卒中康复产品使用感受入手,运用系统研究和主观评价等方法,对脑卒中上肢康复产品以及康复装备相关理论展开研究。
运用市场分析、用户调研、技术分析等产品设计方法开展对上肢康复脑机设备的设计现状分析,重点聚焦患者和医护在康复全流程的体验分析,对基于MI-BCI的脑卒中上肢康复设备进行分析与设计。
并通过客观生理数据和主观评价证明其效果,最终产出新的设计。
整体而言,这项研究为基于MIBCI的康复外骨骼设备的设计提供了有价值的参考,有助于未来设备的改进和实验发展。
【总页数】3页(P132-134)
【作者】宋鲁豫;赵一玮
【作者单位】中南大学建筑与艺术学院
【正文语种】中文
【中图分类】J524.3
【相关文献】
1.基于运动想象的脑机接口康复训练对脑卒中患者上肢运动功能的影响
2.基于运动想象的脑机接口康复训练对脑卒中患者上肢运动功能改善的认知机制研究
3.头皮针抽提法联合基于脑机接口技术的主动式康复训练系统对脑卒中患者上肢运动功能康复的影响
4.运动想象脑机接口在脑卒中后上肢康复中的研究进展
5.运动想象脑机接口技术在脑卒中后运动功能康复中的应用
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ex o s k e l e t o n Ba s e d o n Cl a s s i ic f a t i o n o f Mo t o r I ma g e r y EEG T A NG Z h i c h u a n ・ S U N S h o u q i a n Z HA NG Ke j u n
了 理 论 依 据 和 实 践基 础 。
关键词 :上肢外骨骼 ;共 同空间模式 ;脑 电信号 ;康 复训练
中 图分 类 号 :T P 2 4 9
Re s e a r c h oБайду номын сангаасn t he Co n t r o l M e t ho d o f a n Up pe r - l i mb Re h a b i l i t a t i o n
摘要 :为解决偏瘫患者在主动康 复训 练中对上肢外骨骼的控制难题 ,提 出一种 基于单次运动想象的脑 电信号分类 方法 ,并将 其应 用于 自主研发上肢外骨骼 的实时控制 中。针对脑 电信号信噪 比低 、个 体差异较 大的 问题,提 出一种改进 的共 同空间模式 ( C o mmo n s p a t i a l p a t t e m,c s P ) 特征提取算法 ,并结合 支持 向量机( S u p p o r t v e c t o r ma c h i n e ,S VM) 分类器 ,实现对 单次运动想 象脑电信号的分类 ;使用此 分类 方法 对两种不同试验范式建立分类模 型,并对 其分类表现进行评估 ;将较好分类表 现的分类 模型应用于上肢外骨骼 的实时控制中,验证方法 的可行性 。所 有被试对上肢外骨骼控制 的平均成功 率达 到 8 7 . 1 2 %±2 . 0 3 %。 试验结果表 明,基 于所提 出的运动想象分类方法 ,可 以实现 上肢外骨骼的准确控制 ,并 为面 向康 复训 练的脑机接 口技术提供
基于运 动想 象脑 电信号分 类的上肢康 复外骨骼 控 制方 法研 究 冰
唐 智川 , 2 孙 守迁 2 张克俊 2
( 1 .浙江 工 业大 学 工业 设计 研 究院 2 .浙江 大 学现 代工 业 设计研 究 所 杭州 3 1 0 0 2 3 ; 杭州 3 1 0 0 2 7
2 . Mo d e m I n d u s t r i a l D e s i g n I n s t i t u t e , Z h e j i a n g U n i v e r s i t y , Ha n g z h o u 3 1 0 0 2 7 )
Ab s t r a c t : Fo r s o l v i n g t h e p r o b l e m h o w t h e h e mi p l e g i c p a t i e n t s c o n t r o l t h e u p p e r - l i mb e x o s k e l e t o n d u r i n g t h e a c t i v e r e h a b i l i t a t i o n
第 5 3卷 第 l 0期
2 0 1 7年 5月
机
械
工
程
学
报
v01 . 53 N o. 1O
Ma v
J OURNAL OF M ECHANI CAL EN GI NEER / NG
2 0 l 7
DoI : 1 O. 39 01 / JM E. 20 17 . 1 O. 06 0
c o n t r o l o f a n u p p e r - l i mb e x o s k e l e t o n d e v e l o p e d i s a p p l i e d . Ai mi n g a t t h e l o w n o i s e — s i g n a l r a t i o a n d l a r g e i n d i v i d u a l d i fe r e n c e s o f E EG, a n a d v a n c e d CS P a l g o r i t h m f o r f e a t u r e e x t r a c t i o n i s p r o p o s e d . Co mb i n i n g t h i s a l g o r i t h m wi t h S VM c l a s s i i f e r , t h e s i n g l e — t r i a l mo t o r i ma g e y r EEG i s c l a s s i ie f d . Th e n ,t h i s me t h o d t o c o n s t r u c t c l a s s i ic f a t i o n mo d e l s i n t wo d i f e r e n t p a r a d i g ms i s u s e d ,a n d e v a l u a t e d t h e c l a s s i ic f a t i o n p e r f o r ma n c e o f t wo mo d e l s . T h e c l a s s i i f c a t i o n mo d e l wh i c h h a d a b e t t e r p e r f o r ma n c e i s a p p l i e d i n t h e
t r a i n i n g , t h i s s t u d y p r o p o s e d a n EE G c l a s s i ic f a t i o n me t h o d b a s e d o n s i n g l e — t r i a l mo t o r i ma g e r y .An d t h i s me t h o d i n t h e r e a l — t i me