数控铣床基本编程指令
数控铣床编程指令

数控铣床编程指令Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998数控铣床编程指令4.2.2子程序1、坐标轴运动(插补)功能指令(1)点定位指令G00点定位指令(G00)为刀具以快速移动速度移动到用绝对值指令或增量值指令指定的工件坐标系中的位置。
指令格式:G00X—Y—Z一;式中X—Y—Z一为目标点坐标。
以绝对值指令编程时,刀具移动到终点的坐标值;以增量值指令编程时,指刀具移动的距离,用符号表示方向。
使用G00指令用法如下。
如上图所示,刀具由A点快速定位到B 点其程序为:G00G90X120.Y60.;(绝对坐标编程)(2)直线插补指令G01用G01指定直线进给,其作用是指令两个坐标或三个坐标以联动的方式,按指定的进给速度F,从当前所在位置沿直线移动到指令给出的目标位置,插补加工出任意斜率的平面或空间直线。
指令格式:G0lX—Y—Z—F一;程序段G01X10.Y20.Z20.F80.使刀具从当前位置以80mm/min的进给速度沿直线运动到(10,20,20)的位置。
例3:假设当前刀具所在点为.,则如下程序段N1G;.;将使刀具走出如图所示轨迹。
(3)圆弧插补指令G02和G03G02表示按指定速度进给的顺时针圆弧插补指令,G03表示按指定速度进给的逆时针圆弧插补指令。
顺圆、逆圆的判别方法是:沿着不在圆弧平面内的坐标轴由正方向向负方向看去,顺时针方向为G02,逆时针方向为G03,序格式:XY平面:G17G02X~Y~I~J~(R~)F~G17G03X~Y~I~J~(R~)F~ZX平面:G18G02X~Z~I~K~(R~)F~G18G03X~Z~I~K~(R~)F~G19G02Z~Y~J~K~(R~)F~G19G03Z~Y~J~K~(R~)F~式中X、Y、Z为圆弧终点坐标值,可以用绝对值,也可以用增量值,由G90或G91决定。
由I、J、K方式编圆弧时,I、J、K表示圆心相对于圆弧起点在X、Y、Z轴方向上的增量值。
数控铣床编程指令

数控铣床编程指令 Prepared on 24 November 2020数控铣床编程指令4.2.2子程序1、坐标轴运动(插补)功能指令(1)点定位指令G00点定位指令(G00)为刀具以快速移动速度移动到用绝对值指令或增量值指令指定的工件坐标系中的位置。
指令格式:G00X—Y—Z一;式中X—Y—Z一为目标点坐标。
以绝对值指令编程时,刀具移动到终点的坐标值;以增量值指令编程时,指刀具移动的距离,用符号表示方向。
使用G00指令用法如下。
如上图所示,刀具由A点快速定位到B 点其程序为:G00G90X120.Y60.;(绝对坐标编程)(2)直线插补指令G01用G01指定直线进给,其作用是指令两个坐标或三个坐标以联动的方式,按指定的进给速度F,从当前所在位置沿直线移动到指令给出的目标位置,插补加工出任意斜率的平面或空间直线。
指令格式:G0lX—Y—Z—F一;程序段G01X10.Y20.Z20.F80.使刀具从当前位置以80mm/min的进给速度沿直线运动到(10,20,20)的位置。
例3:假设当前刀具所在点为.,则如下程序段N1G;.;将使刀具走出如图所示轨迹。
(3)圆弧插补指令G02和G03G02表示按指定速度进给的顺时针圆弧插补指令,G03表示按指定速度进给的逆时针圆弧插补指令。
顺圆、逆圆的判别方法是:沿着不在圆弧平面内的坐标轴由正方向向负方向看去,顺时针方向为G02,逆时针方向为G03,序格式:XY平面:G17G02X~Y~I~J~(R~)F~G17G03X~Y~I~J~(R~)F~ZX平面:G18G02X~Z~I~K~(R~)F~G18G03X~Z~I~K~(R~)F~G19G02Z~Y~J~K~(R~)F~G19G03Z~Y~J~K~(R~)F~式中X、Y、Z为圆弧终点坐标值,可以用绝对值,也可以用增量值,由G90或G91决定。
由I、J、K方式编圆弧时,I、J、K表示圆心相对于圆弧起点在X、Y、Z轴方向上的增量值。
数控铣床编程指令

14
4、 暂停G04指令
指令格式 X__ G04 P__ 指令功能 刀具作短暂的无进给光整加工 指令说明 1 地址码X可用小数,单位为S; 2 地址码 P只能用整数,单位为ms。 3 G04程序段必须单独在一段中,该段中不允许有其他指令。
15
第三章 数控机床编程实例
三、刀具补偿指令
1、刀具半径补偿指令(G41、G42、G40)
7
例题
刀具从A点直线插补至B点,使用绝对坐标与增量坐标 方式编程。
G90 G01 X60 Y30 F200 G91 G01 X40 Y20 F200
8
3、圆弧插补指令(G02 G03)
指令格式
G90 G91 G17 G18 G02 G03 X X Y Z I I J K
(R
)F
G19 指令说明
Y
10
XY插补平面
XZ插补平面
YZ插补平面
11
例题
如图所示,设起刀点在坐标原点O,刀具沿A-B-C路 线切削加工,使用绝对坐标与增量坐标方式编程。
12
绝对坐标编程 G92 X0 Y0
增量坐标编程 ห้องสมุดไป่ตู้92 X0 Y0
G90 G17 G00 X200 Y40 M03 S500
G03 X140 Y100 I-60 (或R60) F100 G02 X120 Y60 I-50 (或R50) G00 X0 Y0 M05 M02
G91 G17 G00 X200 Y40 M03 S500
G03 X-60 Y60 I-60 (或R60) F100 G02 X-20 Y-40 I-50 (或R50)
G00 X-120 Y-60 M05 M02
13
数控铣床常用编程指令

数控铣床常用编程指令?一、有关单位的设定1.尺寸单位选择G20,G21,G22格式:G20;G21;G22;本系统采用3种尺寸输入制式:英制由G20指定,公制由G21指定,脉冲当量由G22指定,缺省时采用公制。
3种制式下线性轴、旋转轴的尺寸单位如下表所示。
尺寸输入制式及其单位?线性轴旋转轴英制(G20)英寸度公制(G21)毫米度脉冲当量(G22)移动轴脉冲当量旋转轴脉冲当量这3个代码必须在程序的开头坐标系设定之前用单独的程序段指令。
G20,G21,G22不能在程序的中途切换。
2.进给速度单位的设定G94、G95格式:G94 [ F_ ];G95 [ F_ ];G94为每分钟进给,F的单位依G20/G21/G22的设定而为mm/min,in/min或脉冲当量/min。
此外,G94 F_可以指定旋转轴的速度,旋转轴的速度单位为度/min或脉冲当量/min。
G95为每转进给,在F之后,直接指定刀具在主轴转一转的进给量,单位依G20/G21/G22的设定而为mm/r,in/r或脉冲当量/r。
这个功能必须在主轴装有编码器时才能使用。
G94,G95为模态功能,可相互注销,G94为缺省值。
这两种指令功能的关系为:每分钟进给=每转进给×主轴速度?二、进给控制指令常用G指令动画1.快速定位指定G00格式:G00 X_ Y_ Z_ A_ B_ C_ U_ V_ W_;其中,X,Y,Z,A,B,C,U,V,W为快速定位终点,在G90时为终点在工件坐标系中的坐标;在G91时为终点相对于起点的位移量。
2.线性进给指令G01格式:G01 X_ Y_ Z_ A_ B_ C_ U_ V_ W_ F_;其中,X,Y,Z,A,B,C,U,V,W为终点,在G90时为终点在工件坐标系中的坐标;在G91时为终点相对于起点的位移量。
(1)圆弧进给格式:图2 圆弧插补应用其中,α、β∈{X,Y,Z,U,V,W}为圆弧终点,在G90时为圆弧终点在工件坐标系中的坐标;在G91时为圆弧终点相对于圆弧起点的位移量;γ、δ∈{I,J,K},不论在G90还是在G91时都是以增量方式指定,为圆心相对于起点的偏移值,R为圆弧半径,当圆弧圆心角小于180°时,R为正值,否则R为负值,整圆编程时不可以使用R,只能用γ、δ;F为编程的两个轴的合成进给速度.在G02/G03前必须用G17/G18/G19指定平面,其中用G17代码进行XY平面的指定,省略时就被默认为是G17,但当在ZX(G18)和YZ(G19)平面上编程时,平面指定代码不能省略。
数控铣床基本编程指令
例2 、 整圆编程
要求由A点开始,实现逆时针圆弧插补并返回A点。
Y
R30 O
(2)实际进给速度等于指令速度F与进给速 度修调倍率的乘积。
(3)G01和F都是模态代码,如果后续的程 序段不改变加工的线型和进给速度,可以不 再书写这些代码。
(4)G01可由G00、G02、G03或G33功能注销 。
圆弧插补指令
3、圆弧进给指令 G02 :顺时针圆弧插补
G03 :逆时针圆弧插补
(4)编制圆弧程序段 大圆弧AB
每段圆弧可有四个程序段表示
G17 G90 G03 X0 Y25 R-25 F80 •G17 G90 G03 X0 Y25 I0 J25 F80 •G91 G03 X-25 Y25 R-25 F80 •G91 G03 X-25 Y25 I0 J25 F80
小圆弧AB
选择机床坐标系
(4)、G53 --选择机床坐标系
编程格式:G53 G90 X~ Y~ Z~ ;
G53 指令使刀具快速定位到机床坐标系中的指定位置 上,式中X、Y、Z后的值为机床坐标系中的坐标值。 例:G53 X-100 Y-100 Z-20
G53为非模态指令,只在当前程序段有效.
(5)、G52 –局部坐标系设定
2、该指令执行后,所有坐标值指定的坐标尺寸都 是选定的工件加工坐标系中的位置。1~6号工件 加工坐标系是通过CRT/MDI方式设置的。
3、G54~G59预置建立的工件坐标原点在机床坐标 系中的坐标值可用MDI方式输入,系统自动记忆 。
数控铣床编程指令

数控铣床编程指令与坐标系有关的指令1.设定工件坐标系G92指令指令格式: G92 X__ Y__ Z__指令功能:设定工件坐标系图1 G92设定工件坐标系图2 G54设定工件坐标系指令说明:(1) 在机床上建立工件坐标系:也称编程坐标系:;(2)如图1所示,坐标值X、Y、Z为刀具刀位点在工件坐标系中的坐标值:也称起刀点或换刀点:;(3)操作者必须在工件安装后检查或调整刀具刀位点,以确保机床上设定的工件坐标系与编程时在零件上所规定的工件坐标系在位置上重合一致; (4)对于尺寸较复杂的工件,为了计算简单,在编程中可以任意改变工件坐标系的程序零点。
(5)在数控铣床中有两种设定工件坐标系的方法:如上图1所示,先确定刀具的换刀点位置,然后由G92指令根据换刀点位置设定工件坐标系的原点,1)G92指令中X、Y、Z坐标表示换刀点在工件坐标系XpYpZp中的坐标值; 2)如图2所示,通过与机床坐标系XYZ的相对位置建立工件坐标系XpYpZp,如有的数控系统用G54指令的X、Y、Z坐标表示工件坐标系原点在机床坐标系中的坐标值。
2.绝对坐标输入方式G90指令和增量坐标输入方式G91指令指令格式:G90G91指令功能:设定坐标输入方式指令说明:(1)G90指令建立绝对坐标输入方式,移动指令目标点的坐标值X、Y、Z表示刀具离开工件坐标系原点的距离;(2)G91指令建立增量坐标输入方式,移动指令目标点的坐标值X、Y、Z表示刀具离开当前点的坐标增量。
例题:如图3所示,刀具从A点快速移动至C点,使用绝对坐标与增量坐标方式编程。
图3 使用绝对坐标与增量坐标方式编程增量方式编程:G92 X0 Y0 Z0G91 G00 X15 Y-40G92 X0 Y0G00 X20 Y10X40 Y20绝对坐标编程:G92 X0 Y0 Z0 设工件坐标系原点,换刀点O与机床坐标系原点重合; G90 G00 X15 Y-40 刀具快速移动至Op点;G92 X0 Y0 重新设定工件坐标系,换刀点Op与工件坐标系原点重合; G00 X20 Y10 刀具快速移动至A点定位;X60 Y30 刀具从始点A快移至终点C。
数控铣床编程
三.螺旋线进给指令格式
X Y I_J _Z_;XY平面圆弧,G17可省略
G02 G18 G19 G03 X Z I_K _Y_;ZX平面圆弧 Y_Z_J_K_X_ ;YZ平面圆弧 Z Z_ Y_ X_ :为⊥圆弧面坐标轴的进给量。 例:G90 G17 G03 X30 Y30 I-30 J0 Z30 F100 O
R3=R R2 R1
X
例:见图32所示的刀具半径补偿程序。设加工开始时刀具距离工件表面 50mm,切削深度为10mm。
Y 50
A
b
B
N4 40 a 30 N6 20 d N7 10 与 D01 对应的补偿量 N2 O 10 20 30 40 50 X C N3 N5 c
图 32
刀补动作
按增量方式编程
小结
数控铣床加工范围; 数控铣床常用指令;
2. G00指令刀具相对于工件从当前位置以各轴预先设定的快移进给速度移
动到程序段所指定的下一个定位点。
G00指令中的快进速度由机床参数对各轴分别设定,不能用程序规定。由 于各轴以各自速度移动,不能保证各轴同时到达终点,因而联动直线轴 的合成轨迹并不总是直线。 快移速度可由面板上的进给修调旋钮修正。
数控铣床编程实例:轮廓加工
一、数控铣床常用指令
1 、 快速定位(G00)和直线加工(G01)
(1)快速定位指令格式: G00 X Y Z 。 以机床自身设定的最大移动速度沿直线或折线移动, 移动中不加工。 X Y Z 为终点坐标。 (2)直线加工指令格式: G01 X Y Z F 。 以给定的切削速度F 沿直线进给到X Y Z 指定点。 注:1. G00,G01为模态指令 2. F为模态代码,指定切削速度:在G00或新的F指令出 现以前,一直有效。
数控铣床编程讲解
➢ 格式:
G17
G18
G19
该指令选择一个平面,在此平面中进行圆弧插补和刀
具半径补偿。
G17选择XY平面,G18选择ZX平面,G19选择YZ平面。
移动指令与平面选择无关。例如在规定了G17 Z_时,
Z轴照样会移动。
G17、G18、G19为模态功能,可相互注销,G17为缺省
值。
一、数控铣床常用编程指令
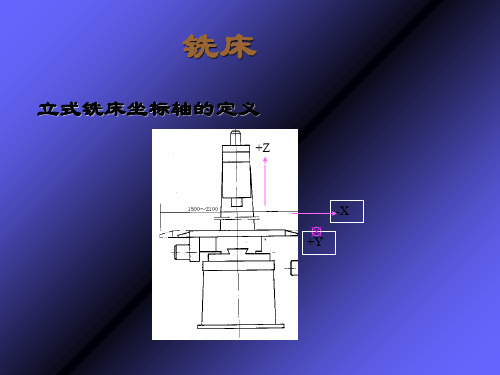
铣床
立式铣床坐标轴的定义
+Z
-X +Y
数控机床编程指令
一、数控铣床编程基本指令 二、数控铣床简化编程指令
一、数控铣床常用编程指令
5-1、M指令(或辅助功能)
表 3-2 指令 M03 M04 M05 M06 M08 M09 M19 M20 M30 M98 M99
功能 主轴正转 主轴反转 主轴停 换刀 切削液开 切削液关
O 20 40 60
N6 M30
%0002 N1 G91G01X20 Y15 N2 X20 Y30 N3 X20 Y-20 N4 X-60 Y-25 N5 M30
图8 两种指令方式
一、数控铣床常用编程指令
2、坐标系设定G92(此坐标最好不要动,要是动 了关机在开机就可消除)
格式:G92 X_ Y_ Z_
二、有关单位的设定
1、尺寸单位选择G20,G21,G22(一般我们会 使用的是G21公制,G20英制是外国人用的单位)
➢格式: G20 G21 G22
本系统采用3种尺寸输入制式:英制由G20指定,公制 由G21指定,脉冲当量由G22指定,缺省时采用公制。 3种制式下线性轴、旋转轴的尺寸单位如表4所示。
➢要取消刀具长度补偿时用指令G49或H00。 ➢G43、G44、G49都是模态代码,可相互注销。
数控铣床常用编程指令及实例

8.3 数 控 铣 床 常 用编程 指令
(a) 左刀补偿
(b) 右刀补偿
图8-11 刀具半径补偿方向
8.3 数 控 铣 床 常 用编程 指令
2.刀具半径补偿编程举例 例8-9 如图8-12所示,按增量方式进行刀具半径补 偿编程。 % O0007; N10 G54 G91 G17 S300 M03; G17指定XOY平 面 N20 G41 G00 X20.0 Y10.0 D01;刀具左补偿 N30 G01 Y40.0 F200; N40 X30.0; N50 Y-30.0; N60 X-40.0; N70 G00 G40 X-10.0 Y-20.0 M05;取消刀补 N80 M02 %
程时可以不考虑刀具在机床主轴上装夹的实际长度,而只需在程序中给出 刀具端刃的Z坐标,具体的刀具长度由Z向对刀来协调,如图8-14所示。当 指令了G43时,用H代码表示的刀具长度偏移值(存储在偏置存储器中)加到 程序中指令的刀具终点位置坐标上。当指令了G44时,同样的值从刀具终 点位置坐标上减去。其计算结果为补偿后的终点位置坐标,而不管是否选
图8-8 小于180度和大于180度的圆弧
8.3 数 控 铣 床 常 用编程 指令
例8-7 如图8-9所示圆弧的绝对值和增 量值编程。
(1)绝对值的情形 G92 X200.0 Y40.0 Z0; G90 G03 X140.0 Y100.0 R60.0 F300. ; G02 X120.0 Y60.0 R50.0; 或者 G92 X200.0 Y 40.0 Z0; G90 G03 X140.0 Y100.0 I-60.0 F300. ; G02 X120.0 Y60.0 I-50.0;
N30 G43 Z-32.0 H01;
在Z方向快进到工件上方3mm处(参考平面)
数控铣床基本编程指令

数控铣床基本编程指令数控铣床基本编程指令是在专门的编程软件上编写出来的程序,通常采用G代码和M 代码编写,主要用于控制机床的移动和加工过程,有效提高生产效率和加工精度。
下面我们来看一下数控铣床基本编程指令的组成和规范。
数控铣床编程是一项重要的技术工作,需要对程序语言、加工工艺以及机床结构有较为深入的了解。
首先要掌握的是G代码和M代码的含义和使用方法;其次要了解加工物的形状、尺寸及加工范围,并结合材料的性质和加工难度制定出切削参数;最后要熟悉机床的运行原理和结构体系,能够有效控制机床进行加工作业。
二、G代码和M代码1. G代码:控制机床的运行路径和加工形状,如G00为快速定位,G01为直线插补,G02和G03为圆弧插补,G28为回原点,G91和G90为相对和绝对坐标等。
2. M代码:控制机床的辅助功能,如M03为主轴正转开启,M08为冷却液开启,M09为冷却液关闭,M30为程序结束等。
三、编程格式1. 文件头:包括程序名称、程序编号、日期、操作者、存储地址、刀具种类、加工物尺寸等信息,方便维护和管理。
2. 准备段:主要是进行机床准备工作,如换刀、调整工件、清洁加工区等。
3. 加工段:根据加工物的特点和要求进行G代码和M代码的编写,实现切削加工。
4. 结束段:完成加工后进行机床的清理和归位操作,并关闭冷却液、主轴等辅助功能。
四、编程规范1. 编码统一:采用较短的英文字母或数字来表示指令,以便记忆和书写。
2. 区分大小写:G代码和M代码必须按照指令大写或小写进行书写。
3. 缩进规范:每层编程语句之间要有适当的缩进,方便代码结构的清楚明了。
4. 换行清晰:每个编程语句必须独立一行,代码清晰明了,易于检查和维护。
5. 注释详细:编写程序时必须加入注释说明,具体解释每个指令的用途及参数设定。
典型的编程指令实例:N100 G90G21G17G94G40N110 T1M06 M03 S500N120 G43H01 Z5.N130 X10.Y10.N180 G00 X0. Y0. Z50.N190 M30以上为典型的数控铣床基本编程指令实例,其中G90表示绝对坐标,G21表示以毫米为单位,G17表示XOY平面加工,G94表示每分钟进给量,G40表示刀具补偿取消,T1表示刀具号,M06表示换刀指令,M03表示主轴正转,S500表示主轴转速500r/min,G43H01表示刀具长度补偿1#,Z5表示从Z轴5mm高度开始加工,X10.Y10表示直线插补起点,Z0表示加工光顺起点,G01Z-5.F200表示Z轴下降5mm,进给速度200mm/min,G01X20.Y20.F500表示X、Y直线插补,进给速度500mm/min,G01Z-15.F300表示Z轴下降15mm,进给速度300mm/min,G00X0.Y0.Z50表示快速移动,M30表示程序结束。
数控铣床基本编程指令
数控铣床基本编程指令1. 简介数控铣床是一种自动化加工设备,通过预先编写的指令控制刀具在工件表面上进行切削加工。
这些指令被称为数控铣床编程指令,是数控铣床能够自动执行加工操作的关键。
本文将介绍数控铣床的基本编程指令,帮助读者了解如何编写和使用这些指令。
2. G代码和M代码在数控铣床编程中,最常用的两种指令是G代码和M代码。
•G代码:用于定义刀具的运动方式和加工路径。
例如,G00表示快速移动,G01表示直线插补,G02表示圆弧插补等。
•M代码:用于定义刀具的辅助功能和机床的控制指令。
例如,M03表示主轴正转,M05表示主轴停止等。
3. 基本编程指令3.1 设置工作坐标系在开始进行数控铣床编程之前,需要先设置工作坐标系。
通过指令G92可以将当前位置设置为工作坐标系的原点。
例:G92 X0 Y0 Z03.2 快速移动快速移动是指刀具在不加工的情况下进行的高速移动。
通过指令G00可以实现快速移动。
例:G00 X100 Y100 Z103.3 直线插补直线插补是指刀具在两个点之间直接移动。
通过指令G01可以实现直线插补。
例:G01 X50 Y50 Z5 F1003.4 圆弧插补圆弧插补是指刀具沿着指定的圆弧路径进行移动。
通过指令G02和G03可以实现圆弧插补。
例:G02 X50 Y50 Z5 I25 J0 F1003.5 停止主轴停止主轴是指停止刀具的旋转。
通过指令M05可以实现停止主轴的功能。
例:M053.6 开始主轴开始主轴是指启动刀具的旋转。
通过指令M03可以实现开始主轴的功能。
例:M03 S10003.7 改变刀具改变刀具是指更换刀具的操作。
通过指令T可以实现改变刀具的功能。
例:T023.8 结束程序结束程序是指终止数控铣床的加工操作。
通过指令M30可以实现结束程序的功能。
例:M304. 示例程序下面是一个简单的示例程序,演示如何使用基本编程指令进行数控铣床的加工。
G92 X0 Y0 Z0G00 X100 Y100 Z10G01 X50 Y50 Z5 F100G02 X50 Y50 Z5 I25 J0 F100M05M03 S1000G01 X0 Y0 Z0 F100M305. 总结本文介绍了数控铣床的基本编程指令,包括设置工作坐标系、快速移动、直线插补、圆弧插补、停止主轴、开始主轴、改变刀具和结束程序等。
数控铣床常用的各种指令
19
3、刀具功能-T 指令 刀具功能格式为: ×× ××( 位数 位数) 格式为:T××(2位数) 一般T代码后的数据为刀具号, 代码后的数据为刀具号 一般 代码后的数据为刀具号,当机床上装配有刀库 该指令使被指令的刀具处在换刀位置。 时,该指令使被指令的刀具处在换刀位置。 例如:指令T05,则刀库旋转,将编号为 的刀具转 例如:指令 ,则刀库旋转,将编号为T5的刀具转 到换刀位。然后须用M06换刀指令将编号为 的刀 换刀指令将编号为T5的刀 到换刀位。然后须用 换刀指令将编号为 具安装到主轴上(主轴上无刀)或交换到主轴上( 具安装到主轴上(主轴上无刀)或交换到主轴上(主 轴上原来有刀)。 轴上原来有刀)。 假设在程序执行中间需要手动换刀, 假设在程序执行中间需要手动换刀,如何 使加工暂停呢? 使加工暂停呢? 指令, 用M00指令,使程序运行停止,由操作者手动换刀。 指令 使程序运行停止,由操作者手动换刀。
18
G30自动返回第 、3、4参考点指令 自动返回第2、 、 参考点指令 自动返回第
G30 P n X_Y_Z_; 自动返回第 、3、4参 自动返回第2、 、 参 考点。 考点。 n=2、3、4,表示选择第 、3、4参考点。若 、 、 ,表示选择第2、 、 参考点 参考点。 省略不写Pn,则表示选择第2参考点 参考点。 省略不写 ,则表示选择第 参考点。 X_Y_Z_为中间点坐标。 为中间点坐标。 为中间点坐标 当自动换刀位置不在G28指令的参考点上时, 指令的参考点上时, 当自动换刀位置不在 指令的参考点上时 通常用G30指令使机床回到自动换刀位置。 通常用 指令使机床回到自动换刀位置。 指令使机床回到自动换刀位置 G30执行过程同 执行过程同G28指令。 指令。 执行过程同 指令
数控铣床常用编程指令

3、圆弧进给指令 G02 :顺时针圆弧插补 G03 :逆时针圆弧插补
指令格式:
G G
17 18
G 19
G 02
G
03
X _Y _
X
_
Z
_
Y_ຫໍສະໝຸດ Z_I _ J _
I
_
K
_
J _ K _
F_
或
G G
数控铣床常用 编程指令
1
1、快速点定位指令G00 格式:G00 X_Y_Z_
说明:1、 其中,X、Y、Z、为快速定位终点,在G90时为终点在 工件坐标系中的坐标;在G91时为终点相对于起点的位移量。
2、G00指定刀具相对于工件以各轴预先设定的速度,从当 前位置快速移动到程序指令的定位目标点。G00指令中的快速移动有 机床参数“快速进给速度”对各轴分别设定,不能由地址F指定。
时针是从垂直于圆弧加工平面的第三轴的正方向看到的回转方向。
数控铣床常用编程指令
Y G03
G02
X G03
G02
Z
G03
G02
OZ
X
OY
Z
OX
Y
平面圆不 弧同 插平 补面的G02与G03选择
数控铣床常用编程指令
5、 I,J,K分别表示X,Y,Z 轴圆心的坐标减去圆弧起点的坐标,如下图所 示。某项为零时可以省略。
17 18
G 19
G 02
G
03
X _Y _
X
_
Z
数控铣常用指令及编程实例

补偿量
刀
具
刀具旋转方向
刀
刀具旋转方向
具
前 进
前
方
进 方 向
在前进方向 右侧补偿
向
补偿量
(a)
(b)
图 31 刀具补偿方向
(a)左刀补 (b)右刀补
2
例. 见图32所示的刀具半径补偿程序。设加工开始时 刀具距离工件表面50mm,切削深度为10mm.
Y 50
A
b
B
N4
40
a
N3
N5
c
30 N6
20
• 用G43、G44指令偏置的方向。H指令设定补偿量在偏置存储器中的 偏置号。
• G43发生前,刀具长度补偿值必须在刀具长度偏置寄存器中设 置完成。执行G43指令时,刀具移动的实际距离等于指令值加 上长度补偿值。而执行G44指令时,刀具移动的实际距离等于 指令值减去长度补偿值。
• G43:其它刀长度-标准刀长度=长度补偿值 • G44:标准刀长度-其它刀长度=长度补偿值
13
• 练习:根据所绘图形读懂程序,写出图中的基点P3、P4、P5、P9的 坐标,在空白括弧中填写对应程序的注释。
• P3(
) P4(
) P5(
) P6(
)
• G92 X0 Y0 Z100(
)
• S800 M03
• G90 G00 X-65.0 Y-95.0 (
)
• G43 G01 Z-15.0 H01(
• 例一:如图所示,加工两个相同的工件,试编写
其加工程序。Z轴开始点为工件上方100mm处,
切深10mm。
18
Y
D
E
50
C
B
数控铣床基本编程指令
Y
终点
X 终点
起点
Z
终点
起点
起点
J I K
圆 心
I
X
圆心
K
圆
心
J
Z
Y
❖当圆弧圆心角小于180°时,R为正值,当 圆弧圆心角大于180°时,R为负值。
如:进刀时,先在安全高度Z上,移动(联动)X、Y 轴,再下移Z轴到工件附近。
退刀时,先抬Z轴,再移动X-Y轴。
直 线 插 补 指 令(G01)
2、直线进给指令G01 ➢格式: G01 X _Y_ Z_ F_
➢ 其中,X、Y、Z为终点, ➢在G90时为终点在工件坐标系中的坐标; ➢在G91时为终点相对于起点的位移量。
值。Biblioteka 三、 参考点控制指令(1)、自动返回参考点 G28 ➢格式: G28 X _ Y _ Z _
➢其中,X、Y、Z 为指定的中间点位置。
说明:
➢执行G28指令时,各轴先以G00的速度快移到程
序指 令的中间点位置,然后自动返回参考点。
➢ 在使用上经常将XY和Z分开来用。先用G28 Z... 提刀并回Z轴参考点位置,然后再用G28 X...Y... 回到XY方向的参考点。
➢
➢说明:
➢(1) G01指令刀具从当前位置以联动的方 式,按程序段中F指令规定的合成进给速度, 按合成的直线轨迹移动到程序段所指定的终点 。
➢(2)实际进给速度等于指令速度F与进给速 度修调倍率的乘积。
➢(3)G01和F都是模态代码,如果后续的程 序段不改变加工的线型和进给速度,可以不再 书写这些代码。
➢ 在G90时为指定点在工件坐标系中的坐标;在 G91时为指令点相对于起点的位移量
➢ G28指令前要求机床在通电后必须 (手动) 返 回过一次参考点。
数控铣床常用编程指令集锦
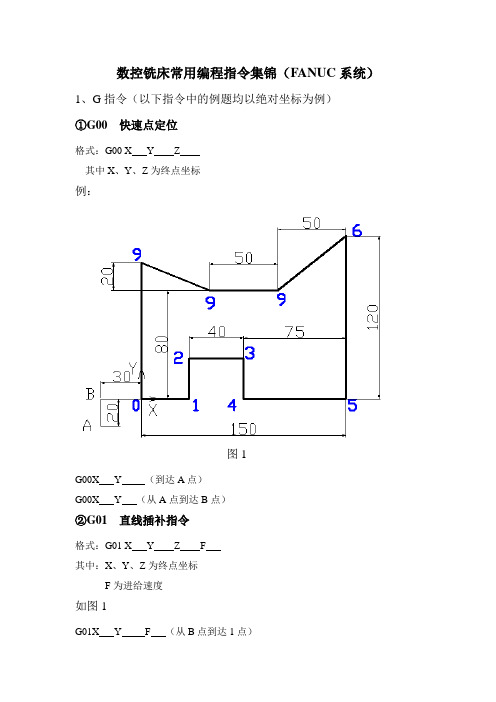
数控铣床常用编程指令集锦(FANUC系统)1、G指令(以下指令中的例题均以绝对坐标为例)①G00 快速点定位格式:G00 X Y Z其中X、Y、Z为终点坐标例:图1G00X Y (到达A点)G00X Y (从A点到达B点)②G01 直线插补指令格式:G01 X Y Z F其中:X、Y、Z为终点坐标F为进给速度如图1G01X Y F (从B点到达1点)G01X Y (从1点到达2点)G01X Y F (从2点到达3点)G01X Y (从3点到达4点)G01X Y F (从4点到达5点)G01X Y (从5点到达6点)G01X Y F (从6点到达7点)G01X Y (从7点到达8点)G01X Y F (从8点到达9点)G01X Y (从9点到达0点)③G02/G03 圆弧插补指令格式:G02/G03 X Y Z R F或G02/G03 X Y Z I J F其中:G02顺时针圆弧G03逆时针圆弧X、Y、Z为终点坐标R为圆弧半径——圆心角小于等于180°,R为正;圆心角大于180°,R 为负;整圆时,不能使用R而改为用I、J来编程I、J为圆弧圆心相对于圆弧起点的X、Y坐标值,即圆弧圆心坐标减去圆弧起点坐标相对应的X、Y值F为进给速度例:如图所示,荷花瓣只加工粗线条,确定所选直径(不要求去除多余材料)O123G X Y R F (到达1点)G X Y R (从1点到达3点)G X Y R (从3点到达5点)G X Y R (从5点到达1点)G X Y R (到达2点)G X Y R (从2点到达6点)G X Y R (从6点到达4点)G X Y R (从4点到达2点)④G41/G42/G40 刀具半径补偿指令格式:G41G00/G01 X Y D ;G42G40 G00/G01 X Y ;其中:G41为刀具半径左补偿;G42为刀具半径右补偿;(沿进给路线的加工方向看去,刀具在工件的左边为左补偿;刀具在工件的右边为右补偿。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Y机
M
D
35
Z2 Z1
机床原点
Z
Y1
M
G92 XY 5X9 2
Y
Y352
Z
X机
Z2
Y
Y 9则2 将Y 54 工135件0 原B 点20 G 5设2 35定C X 到距刀具起
Y
W
X
Y2
工件
原点
X2
始40 点A距离G 59 为30 X45 = -XX 259 ,Y= -Y2 ,
ZG 54=
-Z2
的位置上。 X 54
序 头
G90 G00 X100.0 Y60.0
Z-2.0 S100 M03
G01 X75.0 F100
X35.0
G02 X15.0 R10.0
程 序
G01 Y70.0
主
G03 X-15.0 R15.0
干
G01 Y60.0
G02 X-35.0 R10.0
G01 X-75.0
主程序号 建立工件坐标系,编程零点w 快进到X=100,Y=60 Z轴快移到 Z= -2,主轴 直线插补至 X= 75,Y= 60, 直线插补至 X= 35,Y= 60 顺圆插补至 X=15,Y=60 直线插补至 X=15,Y=70 逆圆插补至 X= -15,Y=70 直线插补至 X= -15,Y=60 顺圆插补至 X= -35,Y=60 直线插补至 X= -75,Y=60
10
G02
G03
G02
G03
G02
30
•G91 G03 X-25 Y25 I-25 J0 F80
X
G18
Z
30
Y
例2 、 整圆编程
要求由A点开始,实现逆时针圆弧插补并返回A点。
Y
R30 O
A X
G90 G03 X30 Y0 I-40 J0 F80 G91 G03 X0 Y0 I-40 J0 F80
G02
F80
30
X
G18
Z
30
Y
r2
(X b,Yb )
B
(X 1,Y 1)
Y R25
➢小圆弧ABO1
O2
(Xa,Ya)
B
(X2 ,Y2 )
r1
A
X
R 25
X
A
G1(7a)G90 G03 X0 Y25 R25 F80
(b)
•G17X G90 G03 X0 YZ25 I-25 J0 F80 Z
•G91 G03 X-25 Y25 R25 F80
线性轴 英寸 毫米 移动轴脉冲当量
旋转轴 度 度
旋转轴脉冲当量
这3个G代码必须在程序的开头坐标系设定之前用单独的程 序段指令或通过系统参数设定。程序运行中途不能切换。
五、 基本编程指令
1、快速定位指令G00
➢格式:G00 X_Y_Z_ 其中,X、Y、Z、为快速定位终点,在G90时为
终点在工件坐标系中的坐标;在G91时为终点相对 于起点的位移量。(空间折线移动)
增量: G91G02 X (xb-xa)Y (yb-ya) R r1 F f ; 或 G91G02 X(xb-xa)Y(yb-ya)I(x1-xa)J(y1-ya)F f ;
r2
(X b,Yb )
(4)B编制圆弧(X1,Y程1) 序段
Y R25
➢大圆弧ABO1
O2
(Xa,Ya)
B
(X2 ,Y2 )
G90 编程
G91 编程
Y
%0001
%0002
45
2
N1 G92 X0 Y0
N1G91G01X20 Y15
N2 G90G01X20 Y15 N2 X20 Y30
25
15
1
3
N3 X40 Y45
N4 X60 Y25
X N5 X0 Y0
O
20 40 60
N6 M30
N3 X20 Y-20 N4 X-60 Y-25 N5 M30
第一篇
项目三 数控铣床基本编程指令 与简单程序编写
一、有关坐标和坐标系的指令
(1)、绝对值编程G90与增量值编程G91 ➢格式: G90 G X— Y — Z — G91 G X— Y— Z—
注意:铣床编程中增量编程不能用U、W. 如果用,就表示为U轴、W轴.
例:刀具由原点按顺序向1、2、3点移动时用G90、G91指 令编程。
(3)G01和F都是模态代码,如果后续的程 序段不改变加工的线型和进给速度,可以不再 书写这些代码。
(4)G01可由G00、G02、G03或G33功能 注销。
圆弧插补指令
3、圆弧进给指令 G02 :顺时针圆弧插补 G03 :逆时针圆弧插补
(1)
指令格式:GG1178
G19
G02 G03
(5)、G52 –局部坐标系设定
编程格式:G52 X~ Y~ Z~ ;
式中X、Y、Z后的值为局部原点相对工件原点的坐标值。
几个坐标系指令应用举例
如图所示从A-B-C-D行走路线
Z
Y
W
X
工件
原点
X2
X1 机床原点
Y机
M
D
35
Z2 Z1
机床原点
Y1
M
X机
Y 59
35 Y
Y 92
Y 54
30 15
B 20
说明:
1、G00 一般用于加工前快速定位或加工后快速退刀。
2、为避免干涉,通常的做法是:不轻易三轴联动。 一般先移动一个轴,再在其它两轴构成的面内联动。
如:进刀时,先在安全高度Z上,移动(联动)X、Y 轴,再下移Z轴到工件附近。
退刀时,先抬Z轴,再移动X-Y轴。
直 线 插 补 指 令(G01)
2、直线进给指令G01 ➢格式: G01 X _Y_ Z_ F_
❖整圆编程时不可以使用R,只能用I、J、K。 起点
❖F为编程的两个轴的合成进给速度。
(3)编程算法
Y r2
(X b,Yb )
B
(Xc,Yc) C
O2
(X2 ,Y2 )
(X 1,Y 1)
O1
(Xa,Ya)
r1
A
X
圆弧AB: 绝对: G17G90 G02 X xb Y yb R r1 F f;
或 G17G90 G02 X xb Y yb I(x1-xa) J (y1-ya) F f ;
其中,X、Y、Z 为指令的定位终点位置。
M
参考点
XY中间点
M
中间点
返回点
Z (X 3 ,Y 3 ,Z 3 )
Z中间点
Z
Z1 Z2
工件
Y
原点
X
W
X1
X2
y
y1
2
W
Y X
四、 有关单位的设定
1、尺寸单位选择G20,G21,G22
➢格式: G20 英制 G21 公制 尺寸输入制式 G22 脉冲当量
英制(G20) 公制(G21) 脉冲当量(G22)
r1
A
每段圆弧可有四个程序段X 表示
R 25
X
G17(Ga)90 G03 X0 Y25 R-25 F80
A (b)
•G17 GX 90 G03 X0 Y2Z5 I0 J25 F80
Z
•G91 G03 X-25 Y25 R-25 F80
10
G02
•G91
G0G303
G02
X-25 Y25
I0
JG023 5
30
G 92
X 92
G92 设置加工坐标系
(3)、工件坐标系选择 G54-G59
G54 G55 G56 G57
G58 G59
Z G54 原点
G54 工件坐标系 Y
Z 。。。
G59 工件坐标系
G59 原点
Y
X 工件零点偏置 X 机床原点
工件坐标系选择(G54~G59)
5、G54~G59为模态指令,可相互注销。
选择机床坐标系
(4)、G53 --选择机床坐标系
编程格式:G53 G90 X~ Y~ Z~ ;
➢ G53 指令使刀具快速定位到机床坐标系中的指定位置 上,式中X、Y、Z后的值为机床坐标系中的坐标值。 例:G53 X-100 Y-100 Z-20
➢ G53为非模态指令,只在当前程序段有效.
N05 G00 G90 X35.0 Y20.0 移到G52中的C点
N06 G53 X35.0 Y35.0
……
移到G53(机械坐标系)中的D点
二、坐标平面选定
坐标平面选择 G17,G18,G19
➢格式: G17
G18
Y
G19
G17
X G19
G18
Z
Y
➢ G17—— XY平面,
G18—— ZX平面,
X _Y _
X
_
Z
_
Y _ Z _
I _ J _
I
_
K
_
J _ K _
F_
或
GG1178 G19
G02 G03
X _Y _ X _ Z _ Y _ Z _
R F_
圆 弧 插 补 指 令(G02/G03)
其中,X、Y、Z为终点, ➢在G90时为终点在工件坐标系中的坐标; ➢在G91时为终点相对于起点的位移量。
说明:
(1) G01指令刀具从当前位置以联动的方式, 按程序段中F指令规定的合成进给速度,按合 成的直线轨迹移动到程序段所指定的终点。
(2)实际进给速度等于指令速度F与进给速 度修调倍率的乘积。
➢ 在G90时为指定点在工件坐标系中的坐标;在 G91时为指令点相对于起点的位移量