纯电动汽车整车控制器硬件在环仿真
新能源汽车动力系统控制器硬件在环测试解决方案

新能源汽车动力系统控制器硬件在环测试解决方案相比较传统汽车,新能源电动汽车(包括纯电动汽车与混合动力电动汽车)动力系统增加了电机驱动系统、电池及其管理系统、整车控制器等关键零部件。
如图1所示,为一种常见的插电式混合动力汽车拓扑结构,与传统汽车相比,动力系统复杂程度增加,控制器数量增多,控制器测试的工作量与难度也相应增加。
图1 一种常见的插电式混合动力汽车拓扑结构新能源电动汽车对动力系统的动力性、经济性、制动性、排放性、可靠性等方面都有很高要求,需要对动力系统进行全面的测试,主要包括:动力性测试:最大输出功率最大扭矩加速时间最大爬坡度最高车速经济性测试:燃油消耗率平均燃油消耗量1 / 6电池能量消耗率平均电池能量消耗量制动性测试制动能量回收功能制动加速度制动距离制动时方向稳定性其它测试相关排放物含量安全防护通信故障诊断在传统的电动汽车动力系统测试中,需要使用大功率直流电源、测功机、功率分析仪、电池检测、数据采集等设备,并需要专门的配套实验室。
即使有了测试环境与测试工具,传统的测试方法还存在以下问题:耗费大量电能并产生废旧电池测试过程繁琐,耗费大量人力物力电机、电池等在极端运行环境下有较大的安全风险测试重现性较差,无法进行自动化测试使用硬件在环(HIL)测试方法,结合传统测试方法,将新能源电动汽车动力系统测试分成两个关键步骤:1.各个控制器的HIL测试,包括电池管理系统的HIL测试,电机控制器的HIL测试、整车控制器的HIL测试以及多个控制器的集成HIL测试,经过这个步骤,可以发现各个控制器存在的大部分问题,大幅降低后续大功率测试的风险与成本;2.整车动力系统的联合测试,利用HIL设备与传统测试台架相结合的联合测试台,对整车动力系统进行联合测试,用于验证动力系统的动力性、经济性、制动性、排放性、可靠性等指标,同时,对动力系统的通信、安全防护、故障诊断等进行全面测试。
相比较传统测试方法,联合测试方法可以更早地发现问题,降低风险与成本,使测试更加全面的同时缩短测试周期。
基于dSPACE硬件在环仿真的纯电动汽车整车控制器开发

能 需 求 及 控 制 策 略 ;未 建 立 良好 的 软 硬 件 平 台 等 。本课 题 期 望 基 于车 辆行 驶 性 、安 全 性 、舒 适 性 、等 多种 性能 的考虑 ,评审 并 制订 V U的控制 C 策略 ,将 VC U各 控 制单 元进 行 模块 化 设计 ,结合 硬件在 环仿 真实 验 ,满 足 电动汽 车基本 性能 指标 。 本 文仅 以某公 司新 上市 某款 纯 电动 轿 车作 为
整 车控 制 的功 能 ,各 分布 式 控 制器 向整 车控 制 网
级 电容控制 器 以实现 车辆各 种工 作模式 。 V U是 电动 汽 车 的核 心 控制 单 元 ,它采集 加 C
络 做 出 回馈 。高 效 性 能 、低 廉 成本 及 高 可靠 性 是
国家 “ 6 ”节能与新能源汽车重大资助项 目 ( 83 编号 :2 0 A 1 3 ) 0 8 A1A19
收 稿 日期 :2 1 0 2—0 2—2 2
自动化
—
—
机械 连接
( )外 嗣芯 片选 用 :多 采川 2
一业 级 ( 4 ℃ ~+ 5 )模 数 转 L 一0 8 换 片选 用 A 5 2 , 实 时 时 钟 D 63 芯 片 选 用 D 19 ,逻 辑 门 芯 片 S30 选 择 N P公 司 的 产 品 ,隔 离 电 X
中 图 分类 号 :U 8 3 42 文 献 标 识 码 :A 文章 编 号 : 10 0 9—9 9 2 1) 8—0 0 一O 4 2(0 2 0 01 6
一一一 一一一 ~一 一一 一 ~一~ 一 ~一 一一~ e 一一 ~ 一 ~~ 一一~ 一
控 制 器硬 件 设计 需 要 考 虑 的几 个重 要 指 标1 目 3J -。 4 前 我 国 电动 汽 车 整 车控 制器 还 无 法全 面 满 足 电动 汽 车 的行 驶 要求 ,主要 表现 在 :未解 决 完 整 的功
新能源整车控制器硬件在环测试研究与应用
新能源整车控制器硬件在环测试研究与应用黄福春(江西万年青水泥股份公司,江西上饶335500)摘要:本文研究了新能源汽车整车控制器硬件在环测试系统搭建的流程。
基于Simulink 搭建了整车控制器模型,结合dSPACE 仿真测试平台应用扭矩管理测试用例进一步说明了硬件在环测试在开发整车控制器的高效实用性。
实验结果表明,搭建的系统符合开发测试的要求,为整车控制器开发测试提供了一条有效的途径。
关键词:硬件在环;整车控制器;新能源汽车中图分类号:U463.6文献标志码:A 文章编号:1003-8639(2019)11-0034-03The Research and Application of Automatic Testing of New Energy Vehicle Based on Hardware-In-The-Loop Simulation TechniqueHUANG Fu-chun(Jiangxi Evergreen Cement Co.,Ltd.,Shangrao 335500,China )Abstract:This paper studies the process of building a hardware -in -the -loop test system for a new energy vehicle.Based on Simulink ,the vehicle controller model is built ,and the torque management test case is applied in combination with the dSpace platform to further illustrate the high efficiency and practicality of the hardware-in-the-loop test in developing the vehicle controller.The experiment results show that the built system meets requirements of development and testing ,and provides an effective way for the development and testing of vehicle controllers.Key words:Hardware-In-The-Loop ;VCU ;new energy vehicle近些年来,随着国家对新能源汽车的重视,在政策和财政的双重支持下,国内各大汽车研究机构纷纷对新能源汽车投入大量人力物力[1]。
汽车控制器硬件在环的概念
汽车控制器硬件在环的概念英文回答:Hardware-in-the-loop (HIL) testing is a type of testing that involves connecting a physical device to a simulated environment. In the context of automotive controllers, HIL testing is used to test the performance of the controllerin a simulated vehicle environment. This allows engineersto test the controller in a safe and controlled environment, without having to risk damaging the actual vehicle.HIL testing is typically performed using a HIL simulator. A HIL simulator is a computer-based system that creates a virtual environment that simulates the behaviorof the vehicle. The physical controller is then connectedto the HIL simulator, and the controller's performance is monitored and evaluated.HIL testing can be used to test a wide range of controller functions, including engine control,transmission control, and braking control. It can also be used to test the controller's response to different driving conditions, such as acceleration, braking, and cornering.HIL testing is a valuable tool for automotive engineers because it allows them to test the performance of the controller in a safe and controlled environment. This helps to ensure that the controller is functioning properly before it is installed in the actual vehicle.中文回答:汽车控制器硬件在环。
硬件在环仿真(HIL):NI领先汽车测试关键之匙
硬件在环仿真(HIL):NI领先汽车测试关键之匙美国国家仪器有限公司(National Instruments, 简称NI)于日前参加了在上海光大会展中心举办的2015年汽车测试及质量监控博览会。
在此次博览会上,NI联合多家业内合作伙伴,集中展示了NI为汽车行业提供的灵活开放式的测试平台与多样化的解决方案。
2015年是汽车测试及质量监控博览会举办的第十个年头,它已确立为向中国汽车工业展示确保质量、可靠性、耐久性和安全性的各种技术与服务的行业内头号展会。
会上逾280家公司展示了自己的新产品,具体领域包括:发动机/排气测试;车辆动力学测试;材料测试以及碰撞测试等。
NI也借助此次盛会向企业及大众展示了NI 在汽车行业的技术优势与优质解决方案。
据了解,现今几乎所有的汽车OEM与一级供应商在各类测试应用中均有使用或集成了NI产品。
通过为控制、设计和测试提供通用平台,NI 帮助用户节省了在汽车研发到生产各个阶段耗费的成本和时间。
凭借业内领先的I/O、灵活现成的硬件、强大高效的LabVIEW开发环境,用户可以创建适合各种应用的解决方案。
目前NI的产品在汽车行业涉及了车载测试和数据记录、硬件在环仿真、台架测试与控制、快速控制原型、生产线测试、车载信息娱乐系统测试等几大应用。
此次博览会上,NI着重展示了其业内权威的硬件在环仿真(HIL)技术方面的应用。
NI通过其创新的低成本模块化硬件和软件平台帮助工程师和科学家设计并建立自己的HIL系统。
硬件在环HIL仿真技术可以使用NI PXI实时控制器运行仿真模型来模拟受控对象的运行状态,配合NI FPGA模块可适应更高动态特性及更高精度的模型应用需求。
NI硬件在环测试平台具有开放的软硬件技术架构,可以减少工程师的开发时间、成本和风险。
在支持第三方硬件和软件建模工具的同时,NI还提供一系列高性能模拟和数字I/O设备,CAN、LIN和FlexRay总线接口,故障注入硬件等硬件,让客户可以高效实现应用。
整车硬件在环(HIL)测试系统软硬件介绍综述
• 准备工作
• 设置ControlDesk与硬件的连接方式
菜单栏
AutoBox为”Network connection”,IP地址为192.168.77.85,主机的IP必须要 在同一个段内 MicroAutoBox为”Bus connection” 若出错,注意检查日志管理器的错误提示
• 准备工作
I/O特性
设置界面的参数描述
• RTI的设置(ADC模块为例)
1 2
6
A B
3组共6个50针接头
17 1
c
50
34
DS1401接头
DS1103接头
• RTW的设置及代码自动生成
RTW设置界面
代码编译
代码编译
时间
选择对应的 编译方法
生成*.sdf文件 数值计算方法 周期
Block reduction 设置为“Off”
整车硬件在环测试系统软硬件介绍
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用
• 实例
• 并行工程问题
• RCP:将设计软件开发的算法方便快捷地在 实时硬件平台上实现,观察其与硬件相连后 的性能,且能进行反复实验和设计。 • HILS:在对象还处于研制阶段或对象硬件很 难得到时,能够在早期完成对控制算法的测 试。
全局总线
2M局部 RAM
2通用 定时器
中断 控制器
16/32位 I/O总线
双端口 RAM CAN接口 80C164
串行接口
32通道 数字I/O
6通道增 量编码器
ADC 16路16位 4路12位
DAC 8路14位
• AutoBox和MicroAutoBox
汽车稳定性控制系统硬件在环仿真

汽车稳定性控制系统硬件在环仿真汽车稳定性控制系统是现代车辆的重要安全装置之一,它能够帮助驾驶员在复杂路况中更好地控制车辆,提高行车安全性能。
本文将介绍汽车稳定性控制系统的原理、硬件在环仿真的概念及其在汽车稳定性控制中的应用前景。
汽车稳定性控制系统通过采集车辆的状态信息,如车速、转向角、横摆角速度等,判断车辆的行驶状态,从而控制车辆的各个执行器,如制动器、发动机等,以保持车辆的稳定性。
该系统通常由传感器、控制器和执行器组成。
传感器负责监测车辆状态信息,控制器根据传感器输入计算控制量,执行器则根据控制量对车辆进行相应的调整。
硬件在环仿真是一种有效的开发手段,它通过模拟汽车控制系统的工作环境,对控制系统进行测试和验证。
在硬件在环仿真中,控制器、传感器和执行器均由模拟器代替,测试人员可以输入各种工况下的模拟信号,观察控制系统的响应和执行情况,从而对控制策略进行调整和优化。
通过硬件在环仿真,我们可以观察到汽车稳定性控制在不同工况下的表现。
例如,在紧急避障情况下,稳定性控制系统应能迅速判断出车辆的行驶状态,并采取相应的控制措施,以保持车辆的稳定性。
通过仿真结果分析,可以验证稳定性控制系统在不同情况下的响应速度和控制效果,从而评估其性能。
汽车稳定性控制系统对于提高车辆的安全性能具有重要意义。
硬件在环仿真作为一种有效的开发手段,能够模拟汽车控制系统的工作环境,对控制策略进行测试和验证。
通过仿真结果分析,可以评估稳定性控制系统的性能,为实际应用提供参考。
随着汽车控制技术的发展,硬件在环仿真在汽车稳定性控制中的应用前景将更加广阔。
随着汽车技术的不断发展,汽车控制系统日益复杂。
为了提高汽车控制系统的开发效率和可靠性,硬件在环仿真(Hardware-in-the-Loop Simulation,简称HILS)被广泛应用于汽车控制系统开发中。
硬件在环仿真能够在原型设计阶段对控制系统进行仿真测试,及早发现并解决潜在问题,从而缩短开发周期、降低开发成本。
智能网联汽车硬件在环虚拟仿真实验平台设计开发

智能网联汽车硬件在环虚拟仿真实验平台设计开发随着智能网联汽车技术的不断发展,越来越多的汽车制造商和科研机构开始将注意力集中在智能网联汽车硬件的设计和开发上。
为了有效地测试和验证这些硬件设备的性能和可靠性,设计和开发一个基于虚拟仿真的实验平台变得尤为重要。
本文将讨论智能网联汽车硬件在环虚拟仿真实验平台的设计和开发。
首先,为了设计和开发一个有效的智能网联汽车硬件在环虚拟仿真实验平台,需要确定仿真系统的整体框架和组成部分。
这些组成部分包括车辆仿真模型、传感器模型、通信模块和控制器模型等。
通过合理的组合和配置这些模型,可以在虚拟环境中完整地模拟智能网联汽车的硬件系统。
其次,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发需要依靠先进的仿真软件和工具。
目前市场上有很多成熟的汽车仿真软件,如CarSim、ADAMS和Vissim等,这些软件具有强大的仿真和建模能力,能够实现真实的汽车行驶环境和各种场景的模拟。
通过使用这些软件,可以方便地进行智能网联汽车硬件在环虚拟仿真实验的设计和开发。
同时,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发还需要考虑到与实际硬件设备的接口和通信。
在虚拟仿真环境中,需要设计和开发模拟传感器和控制器的模型,以模拟真实硬件设备的输入和输出,并与仿真系统进行通信。
这样可以在仿真环境中测试和验证智能网联汽车硬件设备的性能和可靠性。
此外,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发还需要考虑到不同场景下的测试和验证需求。
智能网联汽车在不同的道路条件、环境和交通状况下都需要具备良好的性能和可靠性。
因此,在虚拟仿真实验平台中,需要设计和开发不同场景的仿真模型,以模拟各种不同的道路条件、环境和交通状况,并对智能网联汽车硬件设备进行测试和验证。
最后,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发需要进行充分的测试和验证。
在开发过程中,需要对虚拟仿真实验平台的各个组成部分进行测试和验证,以确保其能够准确地模拟智能网联汽车的硬件系统。
清洁能源汽车整车控制器硬件设计及模拟负载硬件在环仿真系统
供 了代 码优 化模 块包 , 以有 效地 提 高所 生 成代 码 可 的效率 。将 所生 成 的代 码 和 同时 开发完 成 的控制 器
完 成包括 能量管 理 、 障诊 断 、 驶员 接 口及水 冷系 故 驾
l t n p a f r , ih i u l y a t ii l o d a d a i l to m wh c b i b ri ca a n o s d f l
dS PACE i smul t r ao . Ke r s: la e r y ve ce;RCP;VM S; y wo d c e n ne g hil HI a tfca o d L; riiill a
维普资讯
清洁能源汽车整车控制Байду номын сангаас硬件设计及模拟 负载硬 件在环仿真 系统
张 戟 孙泽 昌 金 明 高 峰。 , , ,
(. 1 同济 大 学汽车 学院 , 海 2 1 0 ;. 上 0 8 4 2 新代 车辆技 术有 限公 司 , 海 2 0 5 ) 上 0 0 0
Co Lt . S a g a 0 0 0, h n ) ., d , h n h i 0 5 C i a 2
摘 要 : 绍 了基 于 3 介 2位 MP 5 5处理 器 的 清 C5 洁能 源汽车 的整 车控 制 器 ( VMS 的 V 模 式 开发 流 )
程 , 型 样 机 硬 件 系统 的详 细 设 计 , 利 用 d P E 原 并 S AC
文 献标识 码 : B
1 整 车控 制 器 的 开发 流 程
VMS控 制器 采 用基 于模 型 的设 计 流 程 来 完 成 从 需 求定 义 到最 终 产 品 的全 过 程 , 一过 程分 为 5 这 个 阶 段 : 能设计 图形 化建模 与离 线仿 真 , 速原 型 功 快
基于RTLAB的新能源控制器硬件在环仿真技术

这本书的主题是RTLAB,这是一种实时仿真系统,能够实现硬件在环仿真。 对于从事新能源控制器的研发和优化工作的人来说,RTLAB无疑是一种强大的工 具。在书中,作者详细阐述了如何使用RTLAB进行新能源控制器的硬件在环仿真 的全过程,包括系统的建模、仿真、测试和验证等环节。
书中首先对RTLAB的原理和基本操作进行了详细的介绍,然后通过一个具体 的新能源控制器实例,展示了如何使用RTLAB进行硬件在环仿真。这一部分内容 让我深刻体会到了RTLAB的实用性和灵活性。接着,书中又详细介绍了如何利用 RTLAB进行控制器设计和优化,以及如何解决可能出现的问题。这些内容让我对 新能源控制器的设计和优化有了更深入的理解。
书中详细介绍了RTLAB仿真平台的特点和优势,以及其在新能源控制器硬件 在环仿真中的应用。RTLAB作为一种强大的仿真平台,可以帮助科研人员快速实 现新能源控制器的设计和测试。通过将RTLAB与新能源控制器硬件在环仿真技术 相结合,读者可以更好地理解这一技术的实际应用和效果。
书中还详细介绍了新能源控制器硬件在环仿真的实现过程,包括模型建立、 控制器设计、仿真测试等环节。这一部分的内容非常实用,为读者提供了具体的 操作步骤和方法。通过这些内容,读者可以了解如何将理论转化为实践,实现新 能源控制器的设计和测试。
精彩摘录
在新能源控制器的研发过程中,硬件在环仿真技术(HILS)发挥着重要的作 用。这本《基于RTLAB的新能源控制器硬件在环仿真技术》的书籍,为读者提供 了全面而深入的探讨,对于想要了解新能源控制器硬件在环仿真技术的读者来说, 这本书无疑是一本宝贵的指南。
书中首先对硬件在环仿真技术进行了概述,解释了其基本概念、工作原理和 应用范围。对于初学者来说,这无疑是一个极好的起点。通过了解这些基础知识, 读者可以更好地理解后续的章节和内容。
纯电动汽车整车控制系统设计及其硬件在环仿真
客车技术与研究第2期BUS &COACH TECHNOLOGY AND RESEARCHNo.22019作者简介:郑志敏(1990—),女,硕士;主要从事整车控制开发和软件测试工作。
纯电动汽车整车控制系统设计及其硬件在环仿真郑志敏,谢勇波,王文明,文健峰,杨杰君(湖南中车时代电动汽车股份有限公司,湖南株洲412007)摘要:采用基于模型的方法进行纯电动整车控制系统的设计,建立基于Simulink 环境的各功能模块,并进行基于dSPACE 的硬件在环(HIL )仿真测试。
关键词:纯电动汽车;控制系统;硬件在环仿真中图分类号:U469.72;U463.6文献标志码:B文章编号:1006-3331(2019)02-0012-04Design and Its Hardware -in -the -loop Simulation of Pure Electric Vehicle Control SystemZHENG Zhimin ,XIE Yongbo ,WANG Wenming ,WEN Jianfeng ,YANG Jiejun (Hunan CRRC Times Electric Vehicle Co.,Ltd.,Zhuzhou 412007,China )Abstract :The model -based method is used to design the control system for pure electric vehicles ,the func-tion modules based on Simulink environment is established ,and the hardware -in -the -loop (HIL )simula-tion test based on dSPACE is carried out.Key words :pure electrical vehicle ;control system ;hardware -in -the -loop simulation 纯电动整车控制技术直接决定着车辆运行的稳定和安全[1-2]。
汽车ESP硬件在环仿真试验台搭建毕业论文

汽车ESP硬件在环仿真试验台搭建毕业论文目录第1章绪论11.1选题意义与背景11.1.1汽车电子产品的开发方法与硬件在环仿真11.1.2车身电子控制与汽车主动安全的发展与研究21.1.3本文研究的主要容21.2硬件在环仿真基础理论21.2.1硬件在环仿真的概念31.2.2硬件在环仿真的开发背景与优点31.2.3硬件在环仿真的形式与组成部分31.3汽车防抱死制动系统(ABS)61.3.1 ABS的基本工作原理61.3.2 ABS硬件在环仿真的实现81.4汽车电子稳定性程序(ESP)81.4.1 ESP的基本工作原理81.4.2 ESP硬件在环仿真的实现方法101.5本文研究容14第2章试验台的硬件建设142.1 试验台硬件系统总体方案142.1.1 ABS/ ESP的比较142.2.2 ESP的硬件在环仿真实验台方案142.2 Dspace实时仿真系统152.3 液压控制单元172.4 制动系统与操纵系统182.5 传感器182.6 信号采集电路192.6.1 限幅电路202.6.2 滤波电路202.6.3 隔离电路212.6.4 信号采集电路212.7 实验台架222.8 其他硬件23第3章试验台的软件建设233.1 车身二自由度操纵稳定性数学模型243.2 车辆两轮三自由度直线行驶数学模型283.2.1 车身模型293.2.2 轮胎模型313.2.3 动力传动系模型323.2.4 车辆两轮三自由度数学模型353.3 车辆四轮七自由度数学模型353.3.1 车身模型363.3.2 轮胎模型443.3.3 动力传动系模型463.3.4 制动器模型483.3.5 车辆四轮七自由度数学模型49第4章仿真结果分析504.1 基于Matlab/Simulink的离线仿真504.1.1 模型参数设定504.1.2 油门控制车辆直线加减速工况仿真514.1.3 制动轮缸压力控制车辆直线加减速工况仿真55 4.1.4 转向角控制车辆稳态转向工况仿真564.2 基于Dspace的实时仿真614.2.1 Matlab/Simulink与Dspace的无缝连接614.2.2 无I/O接口的实时仿真624.2.3 有I/O接口的实时仿真654.2.4 仿真结果分析68第5章全文总结与工作展望68致谢69参考文献69附录71第1章绪论1.1选题意义与背景1.1.1汽车电子产品的开发方法与硬件在环仿真近年来,人们对提高汽车的动力性和经济性以与降低排放的呼声越来越强,同时对汽车的安全性和舒适性的要求也越来越高,这种趋势促进了汽车技术,尤其是汽车控制技术的发展。
智能车硬件在环仿真系统的设计与实现

3、故障诊断与恢复
HiL系统在运行过程中可能会遇到各种故障和异常情况,为了保证系统的稳定 性和可靠性,需要实现故障诊断和恢复机制。在实际应用中,可以使用故障诊 断专家系统、自适应滤波等方法进行故障诊断和恢复。
结论:
智能车硬件在环仿真系统是一种有效的智能汽车研发测试方法,它可以提高车 辆的安全性、舒适性和环保性能。通过HiL系统的设计和实现,可以在车辆实 际制造之前对控制算法、决策策略、系统性能等进行全面评估和优化,降低车 辆研发和测试成本,缩短车辆研发周期。
谢谢观看
2、仿真环境设计
仿真环境是HiL系统的核心部分,其精度和真实性直接影响到测试结果的可信 度。因此,需要建立高精度的车辆模型、传感器模型和道路环境模型。在实际 应用中,可以使用现有的仿真软件平台进行二次开发,如MATLAB/Simulink、 Prescan等,以满足特定需求。
3、实时操作系统设计
未来随着智能汽车技术的不断发展,HiL系统也将不断改进和完善,为智能汽 车的研发和应用提供更强大的支持。
参考内容
随着可再生能源在全球能源结构中的地位日益提升,风能作为一种重要的可再 生能源,得到了广泛的应用和发展。风电变流器作为风力发电系统中不可或缺 的部分,其性能和稳定性对整个风电系统的运行有着重要影响。本次演示主要 探讨了风电变流器的RTLAB硬件在环仿真系统设计与实现方法。
智能车硬件在环仿真系统的设 计与实现
目录
01 一、智能车硬件在环 仿真的概念
03
三、智能车硬件在环 仿真系统的实现
02
二、智能车硬件在环 仿真系统的设计
04 参考内容
随着科技的快速发展,智能汽车已经成为现代交通领域的重要组成部分。为了 在激烈的市场竞争中保持领先地位,许多汽车制造商和研发机构都在积极探索 和研究新的技术,以提高汽车的安全性、舒适性和环保性能。其中,智能车硬 件在环仿真系统(Hardware-in-the-Loop Simulation,简称HiL)作为一种 有效的仿真测试方法,被广泛应用于智能汽车的研发过程中。
电动汽车硬件在环仿真系统技术参数

电动汽车硬件在环仿真系统技术参数
基于仿真技术为被测ECU搭建实验室条件下的虚拟测试环境,能模拟实车测试中遇到的所有工况范围,在实车道路试验之前即可对ECU功能进行全面测试,提供的测试范围覆盖了ECU的全部功能,包括正常控制功能测试、故障诊断功能测试以及与其他ECU的通讯和交互功能测试,需由硬件系统、软件系统和仿真模型三部分组成。
1. 硬件系统要求
提供满足车辆模型实时运行的实时仿真环境,模拟控制器正常运行所需的所有输入信号,并采集控制器发出的控制命令,同时可以进行故障仿真。
具体要求如下:
2. 软件系统要求
提供图形化的编程界面,采用图形化的方式配置实时应用程序,能够方便的搭建适合于测试系统本身的监控和测试界面,同时通过软件与实时硬件操作系统的互联,可以实现模型参数的显示、修改标定等,提供虚拟仪表。
支持多核、多处理器应用程序。
支持自动化测试。
3. 仿真模型要求
3.1 基于MATLAB/Simulink平台,包括车辆电气模型库(电池、起动机、发电机、负载、电机、控制器、三电平逆变器、若干辅助模块)、整车模型库(车辆系统动力学模型)和环境模型(道路模型、驾驶员模型等)
3.2 图形化的模型参数化软件,可以方便的对模型参数进行修改,并下载到实时硬件或Simulink里面。
电动汽车直流充电系统硬件在环仿真研究

科学技术创新2020.11电动汽车直流充电系统硬件在环仿真研究李清平夏雨(易特驰汽车技术(上海)有限公司,上海200335)1概述随着全球能源危机的加剧和对环保的日益重视,国家从政策角度大力发展新能源电动汽车产业。
目前制约电动汽车快速发展的一个重要瓶颈是充电速度,电动汽车目前主要有两种充电方式:直流充电和交流充电,也是是常说的快充和慢充。
直流充电桩的最高电压会超过1000V [1],部分最大功率会超过350KW ,这时充电时车辆与充电桩的交互过程及对应的安全方面的问题就显得尤为突出,车辆控制单元在该部分功能设计研发阶段需要做充分的测试,因此对测试的快速性和安全性都提出了要求[2]。
若能采用硬件在环(HIL ,Hardware in the loop )的测试方式,可以在开发阶段的早期就对车辆的充电功能进行测试,能满足开发的快速迭代和测试的功能安全需求[3]。
本文采用ETAS 公司的Labcar 硬件在环设备对直流充电功能进行仿真测试,讲述了BMS 控制器端的控制逻辑和对应的HIL 测试方法,通过搭建硬件在环测试平台,验证了某控制器在不同工况下的功能和安全保护策略。
2直流充电系统工作原理现在绝大多数厂家的直流充电功能都遵循GB/T 18487标准[4],充电桩和车辆之间在完成各种信息交互和检测后再进行充电。
车辆端的充电控制功能一般在VCU (vehicle control unit,整车控制器)中进行,也有部分厂家会把这部分功能集成在BMS (battery management system ,电池管理系统)中。
在本小节的系统工作原理中,为了符合习惯用法,用VCU 来代表包含直流充电功能的控制器。
直流充电的原理图如图1所示。
图中虚线矩形框表示的是充电枪与车辆端充电接口,左侧矩形框表示的是充电桩部分,右侧矩形框表示的是车辆部分。
直流充电过程包括多个电压信号校验和CAN 报文通讯(唤醒、电池参数、充电参数)等动作,在握手通过后充电指示灯亮起后,才可以进行充电。
整车电控系统硬件在环测试技术研究
整车电控系统硬件在环测试技术研究近年来,随着车载电子技术的不断发展,整车电控系统作为汽车智能化的核心部件,也得到了快速的发展并广泛应用。
而在整车电控系统的研发中,环境测试技术是必须要进行的一项工作,用于验证整车电控系统在各种复杂环境下的稳定性和可靠性。
本文将围绕整车电控系统硬件在环测试技术展开讨论。
整车电控系统硬件在环测试技术指的是,通过建立相应的测试环境,对整车电控系统的各个部件和整体进行测试,以验证其在真实的工作环境中的性能和可靠性。
具体来讲,整车电控系统硬件在环测试技术主要包括以下几个方面:1.环境模拟在真实的工作环境中,整车电控系统会受到各种外界因素的影响,如恶劣的天气条件、高温、低温、高海拔等等。
因此,进行整车电控系统的环境模拟测试是非常必要的。
这需要利用一系列专业的测试设备,如环境试验箱、气候试验箱等,来模拟各种极端环境条件,对整车电控系统进行测试。
2.性能测试性能测试是对整车电控系统硬件在环测试的一个重要方面。
通过对整车电控硬件各个部件的性能进行测试,可以评估其在不同工况下的工作状态和表现。
例如,对于ECU(Engine Control Unit)等电机控制器,可以进行电机转速、转矩、加速度等性能参数的测试,以评估其在加速、行驶、制动等工况下的表现。
3.可靠性测试整车电控系统硬件在环测试的另一个重要方面是可靠性测试。
这需要对整车电控系统的各个部件进行长时间的测试,以评估在实际使用中其稳定性和可靠性。
这也包括对电路板、电缆、插头等连接件的耐用性测试,以保证它们在长期的使用中不会出现故障。
总体来看,整车电控系统硬件在环测试技术的开发是非常重要和必须的。
通过进行环境模拟、性能测试和可靠性测试等一系列的测试工作,可以帮助制造商提高整车电控系统的性能稳定性,使其符合更高的品质标准,从而为消费者提供更好的驾驶体验。
未来,我们可以期待整车电控系统硬件在环测试技术的不断发展和完善,进一步推动智能汽车的快速发展。
新能源汽车驱动电机硬件在环仿真技术综述
电气传动2022年第52卷第1期摘要:随着新能源汽车电机驱动系统的发展以及复杂度和集成度的提高,电机驱动系统的测试已成为整车开发的重要组成部分。
但大功率电机驱动测试难度较大且风险较高,尤其对于电机控制系统,传统的台架和实车测试往往不能满足需求。
从信号级硬件在环和功率硬件在环仿真的结构、实时仿真模型、应用领域三个方面进行综述,通过比较硬件在环仿真和传统台架测试的优缺点,明确了电机硬件在环仿真准确性和灵活性的优点,体现出电机硬件在环仿真测试方法的优越性。
关键词:电机模拟;电机驱动;硬件在环测试;功率级电机模拟器中图分类号:TM306文献标识码:ADOI :10.19457/j.1001-2095.dqcd22138Overview of New Energy Vehicle Drive Motor Hardware -in -the -loop Simulation Technology WANG Zhifu 1,SUN Qingle 1,LI Haolong 2,WANG Xu 2,GUO Yifeng 2,LIANG Changchun 3,WANG Rui 3(1.School of Mechanical Engineering ,Beijing Institute of Technology ,Beijing 100081,China ;2.School of Electrical and Information Engineering ,Guangxi University of Science and Technology ,Liuzhou 545026,Guangxi ,China ;3.Beijing Key Laboratory of Intelligent Space Robotic System Technology and Applications ,Beijing Institute of Spacecraft System Engineering ,Beijing 100094,China )Abstract:With the development of motor drive system of new energy vehicle and the increase in complexity and integration ,testing of motor drive system has become an important part of vehicle development.But high-power motor drive testing is more difficult and has higher risks ,especially for motor control system ,traditional bench and real vehicle tests often fail to meet demand.An overview was provided from the three aspects of signal hardware-in-the-loop and power hardware-in-the-loop simulation structures ,real-time simulation models and applications.By comparing the advantages and disadvantages of hardware-in-the-loop simulation and traditional bench testing ,the advantages of accuracy and flexibility of motor hardware-in-the-loop simulation were clarified ,and the superiority of the motor hardware-in-the-loop simulation test method was reflected.Key words:motor emulation ;motor drive ;hardware-in-the-loop test ;power motor emulator基金项目:国家自然科学基金项目(51775042)作者简介:王志福(1977—),男,博士,高级实验师,Email :*****************.cn 通讯作者:李昊龙(1994—),男,硕士生,Email :************************新能源汽车驱动电机硬件在环仿真技术综述王志福1,孙庆乐1,李昊龙2,王旭2,郭毅锋2,梁常春3,王瑞3(1.北京理工大学机械与车辆学院,北京100081;2.广西科技大学电气与信息工程学院,广西柳州545026;3.北京空间飞行器总体设计部空间智能机器人系统技术与应用北京市重点实验室,北京100094)随着新能源汽车普及率的提高,未来十年内电机在新能源汽车的占比仍将增长,为了促进高功率电机的研发和新型电机结构的设计,精准的电机模型和高性能的电机仿真是必不可少的。
硬件在环仿真的基本概念与工作流程

硬件在环仿真的基本概念与工作流程
硬件在环仿真,是指通过模拟硬件电路在特定环境下的运行状态,来进行系统验证和性能评估的过程。
它广泛应用于电子设计自动化(EDA)领域,尤其在集成电路(IC)设计和嵌入式系统开发中发挥着重要作用。
硬件在环仿真的基本概念主要涉及仿真工具、硬件描述语言(HDL)、仿真模型、仿真环境和仿真验证等内容。
其工作流程一般包括建立仿真模型、设定仿真环境、执行仿真任务和分析仿真结果等步骤。
建立仿真模型是硬件在环仿真的第一步。
在这个阶段,设计工程师会选择合适的硬件描述语言,如Verilog HDL或VHDL,来描述电路的结构和功能。
也会编写仿真模型,模拟电路的行为和性能。
设定仿真环境是环仿真过程中的关键一步。
在这个阶段,工程师需要选择合适的仿真工具,并配置仿真环境,包括仿真时钟频率、输入输出信号、仿真时长等参数,以确保仿真任务的准确性和完整性。
随后,执行仿真任务是硬件在环仿真的核心步骤。
在这个阶段,工程师将建立好的仿真模型和设定好的仿真环境输入到仿真工具中,执行仿真任务并监控仿真过程,以获取电路的真实运行状态。
分析仿真结果是硬件在环仿真的最终步骤。
在这个阶段,工程师会对仿真结果进行分析和验证,以评估电路的性能和功能是否符合预期,并对设计进行优化和改进。
硬件在环仿真是一项复杂而又重要的工作,它可以帮助设计工程师在电路设计的早期发现和解决问题,节约时间和成本。
随着科技的不断进步,硬件在环仿真技术也在不断发展和完善,为电子行业的发展起到了积极的促进作用。
HiL系统简介
HiL系统简介HiL(Hardware-in-the-Loop)硬件在环仿真测试系统是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的ECU连接,对被测ECU进行全方面的、系统的测试。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,减少了实车路试的次数,缩短开发时间和降低成本的同时提高ECU的软件质量,降低汽车厂的风险。
在新能源汽车这个全新的领域中,HiL硬件在环仿真测试对于三大核心电控系统:整车控制系统、BMS电池管理系统、MCU电机控制器是非常重要的。
但其高精度的实时性要求、大电压大电流的安全性、信号接口的特殊属性、以及系统的可扩展性都使得传统汽车电控系统的HiL硬件在环仿真测试系统无法解决。
意昂科技与欧美业内专业公司建立了合作伙伴关系,为国内汽车行业客户提供新能源的HiL硬件在环仿真测试解决方案。
意昂科技负责整套HiL系统的设计、制造、集成、初验收、安装调试、终验收和售后服务等,实施交钥匙工程。
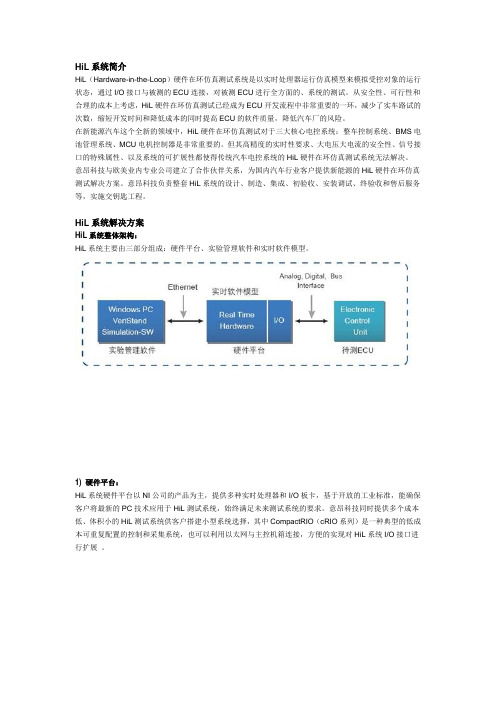
HiL系统解决方案HiL系统整体架构:HiL系统主要由三部分组成:硬件平台、实验管理软件和实时软件模型。
1) 硬件平台:HiL系统硬件平台以NI公司的产品为主,提供多种实时处理器和I/O板卡,基于开放的工业标准,能确保客户将最新的PC技术应用于HiL测试系统,始终满足未来测试系统的要求。
意昂科技同时提供多个成本低、体积小的HiL测试系统供客户搭建小型系统选择,其中CompactRIO(cRIO系列)是一种典型的低成本可重复配置的控制和采集系统,也可以利用以太网与主控机箱连接,方便的实现对HiL系统I/O接口进行扩展。
硬件平台主要组成部分:实时处理器、I/O 接口、故障注入单元(FIU), 通信接口、FPGA模块、负载模拟单元、信号调理单元、可编程电源、机柜和分线箱等。
2) 实验管理软件:HiL系统实验管理软件平台以NI VeriStand 2010 为核心组建,与实时处理器通过以太网连接,配合LabVIEW, FPGA Module,Real Time Module及其他丰富的功能扩展包,用户可进行:硬件配置管理自主更新硬件资源升级系统功能从Simulink等第三方建模环境中导入控制算法或系统模型提供测试命令创建可视化交互界面灵活修改用户界面配置激励生成事件警报完成测试自动化记录数据自动分析数据和生成报告等3) 实时软件模型:HiL系统实时软件模型主要包括:HiL系统采用开放的硬件平台,支持多种仿真模拟软件:发动机模型 Matlab/Simulink/Stateflow/RTW电池模型 LabVIEW Control Design and Simulation电机模型 Tesis enDYNA/veDYNA传动系统模型 CarSim/TruckSim驾驶员模型 GT-POWER车辆动力学模型 AMESim路面及环境模型等HiL系统主要特点:真正开放式的软硬件平台,支持第三方硬件,系统升级与扩展方便支持C, C++, Matlab/Simulink, LabVIEW, DLL等多语言环境实时高精度数据采集和数据多速率采样全球服务、支持与专业的合作伙伴方便集成第三方HiL产品- 电池模拟(DMC)- 电机仿真(OPAL-RT, SET)- 发动机仿真(MicroNova)交钥匙服务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
纯电动汽车整车控制器的硬件在环仿真研究
北京理工大学
研究成果声明
本人郑重声明: 所提交的学位论文是我本人在指导教师的指导下进行 的研究工作获得的研究成果。 尽我所知, 文中除特别标注和致谢的地方外, 学位论文中不包含其他人已经发表或撰写过的研究成果, 也不包含为获得 北京理工大学或其它教育机构的学位或证书所使用过的材料。 与我一同工 作的合作者对此研究工作所做的任何贡献均已在学位论文中作了明确的 说明并表示了谢意。 特此申明。 签 名: 日期:
关键词:纯电动汽车;离线仿真模型;实时仿真平台;整车控制器;硬件在环仿真
I
北京理工大学硕士学位论文
Abstract
The biggest advantage of Electric vehicles is that it do no harm to our environment,besides it can solve the problem of oil shortage. As a result of these advantages,electric vehical has become a hotspot in the field of vehical.Vehical control unit ,which is the core of vehical control system,is able to calculate the running parameters such as the driving power and torque according to the state variables such as the position of the accelerator pedal,the gears and the SOC of the batteries .Then it can coordinate the operation of all parts and ensure proper operation. In this paper,a distributed electric vehicle hardware in loop simulation system are built up in order to realize the fast and efficient development of vehicle control unit. The 16-bit chips of Freescale are chosen as the micro controllers of vehical control unit and simulation controller.The components can contact with each other to transfer the energy data and information data through CAN bus.All these constitute the whole vehical control system,which can realize the hardware in loop simulation of vehical control unit.The following jobs have been finished in this paper. 1.Build up the off-line simulation model of electric vehical based on MATLAB simulink environment.The off-line model is consist of motor model,battery model,gearbox model,final drive model,wheel model,and the velocity model.Finish the off-line simulation and get simulation system data under the condition of UDDS. 2.Build up the real time simulation model of electric vehical through desighing the simulation controller,writing the real time simulation code and establishing transferring protocol. Finish the real time simulation and get simulation system data under the condition of pare the result of the two kinds simulation to prove the validity of the real time simulation system. 3.Finish the hardware in the loop simulation of vehical control unit and test the function of vehical control unit. The result of the experiment shows that the vehical control system can finish the hardware in the loop simulation of vehical control unit in an efficient ,fast and low cost way. Key Words: Electric vehicle; Offline simulation model;Real time simulation system; vehical control unit;Hardware in the loop simulation
II
北京理工大学硕士学位论文
目录
第 1 章 绪论............................................................................................................. 1 1.1 电动汽车及其发展 ................................................. 1 1.2 整车控制系统的发展与应用 ......................................... 3 1.2.1 整车控制系统及其作用 ........................................ 3 1.2.2 整车控制系统的发展趋势 ...................................... 5 1.3 整车控制器的开发及应用 ........................................... 5 1.3.1 整车控制器及其作用 .......................................... 5 1.3.2 整车控制器的开发 ............................................ 5 1.4 硬件在环仿真的发展与应用 ......................................... 7 1.4.1 硬件在环仿真及其优点 ........................................ 7 1.4.2 国内外硬件在环仿真的发展状况 ................................ 7 1.5 本文的研究内容及文章的结构安排 ................................... 9 第 2 章 纯电动汽车动力学模型离线仿真................................................................ 10 2.1 锂离子电池建模 .................................................. 10 2.1.1 锂离子电池等效电路模型 ..................................... 10 2.1.2 锂离子电池离线仿真模型 ..................................... 12 2.2 电机建模 ....................................................... 16 2.2.1 电机模型的建立方法 ......................................... 16 2.2.2 电机离线仿真模型 ........................................... 16 2.3 变速箱建模 ...................................................... 19 2.4 主减速器建模 .................................................... 20 2.5 车轮模块建模 .................................................... 21 2.6 车速模块建模 .................................................... 23 2.7 驾驶员操控及监控显示模块 ........................................ 25 2.7.1 驾驶员操纵模块 ............................................. 25 2.7.2 仪表显示界面 ............................................... 25 2.8 整车离线仿真 .................................................... 26