激光雷达测风技术(4)
风力发电机组 测风激光雷达 技术要求与试验方法

风力发电机组测风激光雷达技术要求与试验方法1. 引言1.1 概述风力发电是一种利用风能转换为电能的可再生能源的技术。
随着全球对清洁能源需求的增加,风力发电机组逐渐成为主要的电力供应方式之一。
测风激光雷达是一种用于准确测量大气中风速和方向的先进技术。
本文将围绕着风力发电机组与测风激光雷达之间的关系,探讨其技术要求和试验方法。
1.2 文章结构本文共分为五个部分,分别是引言、风力发电机组技术要求、测风激光雷达技术要求、技术要求与试验方法比较分析以及结论与展望。
在引言部分,我们将对文章进行一个整体的介绍和概述。
随后,在各个章节中,我们将详细讨论风力发电机组和测风激光雷达的相关技术要求,并通过比较分析它们之间相互影响和依赖关系来探讨它们在实际应用中可能出现的问题。
最后,在结论与展望部分,我们将对本文所阐述的内容进行总结评价,并提出未来研究的方向。
1.3 目的本文的主要目的是对风力发电机组和测风激光雷达技术要求与试验方法进行详细研究和比较分析。
通过探讨它们的原理、功能需求、设计要素、安全考虑以及技术参数等方面,可以更好地了解它们之间的关联性,为相关领域的研究和应用提供参考依据。
同时,通过对比分析不同技术标准和试验方法,可以揭示出可能存在的差异和问题,并为进一步改进和优化这些技术提供指导意见。
最终,本文旨在促进风力发电领域与测风激光雷达领域之间的交流与合作,推动能源行业向更加清洁、高效和可持续发展迈进。
2. 风力发电机组技术要求:2.1 功能需求:风力发电机组作为一种可再生能源装置,其功能需求主要包括以下几个方面:1)高效转化:能够将风能高效转化为电能,实现最大化的能量利用;2)稳定输出:具备稳定的电力输出特性,能够适应不同风速和气候条件下的工作环境;3)自适应调节:具备自动调节机制,可以根据实时的风速变化进行叶片转速的控制,以更好地匹配风能资源;4)系统监测:配备完善的监测系统,对设备运行状态、功率输出等进行实时监测和数据记录;5)安全保护:具备多重安全保护功能,防止因恶劣天气或异常情况导致设备损坏或人身伤害。
激光雷达测风技术(4)

航天学院
NOAA HRDL (A SOPA Lidar)
航天学院
直接探测激光测风雷达结构
发射机:必须是单频激光器(稳频窄线宽) ,如倍频532nm、三倍 频355nm或四倍频266nm ; 接收机:如果测量精度为1m/s,则频率分辨率=2v/=5.6MHz (对于532nm)
航天学院
激光雷达的后向散射信号
航天学院
VAD 扫描矢量风场反演
径向速度vR可以由v、u和w组成,纬度风速分量usincos,子午线速 度分量vcos cos,垂直速度分量wsin, -方位角,向北顺时针, 仰角。
对于VAD扫描:仰角是常量,方位角是变量,径向速度vR是测 量量,(u, v, w)满足下式:
上式还可表示为:
对流层
2-16 0.5
平流层
16-30 2.0
低对流层
0-5 5
高对流层
5-16 10
平流层
16-20 10
风分布数
风分布间距 时间采样 测量精度 水平积分区域
/hour
km hour m/s km 1.5
30,000
50 3 1.5 50 2 5
100
>500 12 5 50 5
航天学院
激光雷达测风技术发展趋势
aerosol signal molecular signal transmitted signal
sunlight
L
Wavelength
航天学院
双F-P标准具多普勒检测
I I IL T() Backscattered signal
Laser
I IL 1 d L I 0 T ' ( L )
Nd:YAG
Molas B300测风激光雷达使用说明书

Molas B300测风激光雷达使用说明书V2.0南京牧镭激光科技有限公司NANJING MOVELASER CO.,LTD目录1安全信息 (3)1.1用户须知 (3)1.2安全标识 (3)1.3激光器安全等级 (4)2产品介绍 (4)2.1测风激光雷达工作原理 (4)2.2产品特点 (5)2.3应用领域 (5)2.4装箱清单 (6)2.5开箱及检查 (6)2.6运行环境 (7)2.7产品性能 (7)2.8整机尺寸图 (9)2.9系统结构 (9)2.10通信方案 (10)3供货安装(调试)方案 (11)3.1接到安装任务 (11)3.2现场勘查地点 (12)3.3雷达与安装材料运输到指定地点 (18)3.4系统安装 (19)3.5其他事项 (25)3.6采集数据归档 (25)4产品的使用 (26)4.1对外接口 (26)4.2设备安装 (28)2.12远程通信安装 (28)4.4温湿压传感器安装(选装) (30)4.5设备工作及客户端操作 (30)4.5设备防护 (36)4.7包装与运输 (36)4.8耗材说明 (37)4.9注意事项 (38)5常见故障排除及解决 (38)附录数据说明 (40)1概述 (40)2数据文件组成 (40)图1Molas B300数据文件组成 (40)2.1数据文件名 (40)2.2文件格式 (40)2.3数据格式 (41)图3数据文件头 (41)表1十分钟平均数据文件表格头 (42)表2秒级平均数据文件表格头 (43)3数据处理方法 (44)3.1秒级风速文件 (44)表3秒级数据文件摘要表 (44)表410min数据文件摘要表 (44)1安全信息感谢您选择牧镭激光公司Molas B300测风激光雷达产品,本用户手册为您提供了重要的安全、维护、操作及其他方面的信息。
故在使用该产品之前,请务必先仔细阅读本用户手册。
为了确保操作安全及设备的正常运行,请遵守以下注意和警告事项以及该手册中的其他信息。
复杂地形下激光雷达测风误差的修正

复杂地形下激光雷达测风误差的修正随着激光雷达在风能行业的广泛应用,如何准确地测量复杂地形下风场成为了一个重要的研究方向。
然而,受到物理环境的限制,各种误差对于激光雷达测风的影响不能被忽视,对于这些误差的修正是提高风场测量精度的重要方法之一。
本文将针对复杂地形下激光雷达测风误差进行探讨,并介绍一些常用的误差修正方法。
一、复杂地形下风场测量中的误差来源1. 大气折射误差大气条件的变化会导致信号的折射,改变从地面反射回来的光路。
这种折射现象可能产生大量的误差,特别是在高低温差异较大及湍流明显的气象条件下更加严重。
这一点影响因子比较复杂,包括大气中水汽、颗粒物等折射系数,空气稳定性、湍流强度等因素。
2. 仪器误差激光雷达的内部误差是指由设备本身产生的偏差,例如激光发射的能量波动、接收器的噪声、时钟漂移等。
这些误差难以避免,只能通过精确的校准和调试工作,减小其对测量精度的影响。
3. 地形扰动误差地形对流场运动产生了宏观和微观扰动,这些扰动导致了流场的非均匀性和非线性特性,进而影响了激光雷达信号的反射和接收。
此外,在激光雷达所在的地面上,地形的现象也会对激光雷达的测量产生影响。
4. 系统偏差系统偏差是当仪器放在不同的位置或角度时,在旋转的平面内出现的偏差。
这种偏差又分为系统偏差和随机偏差两种类型。
系统偏差是指在相同方位上的多次测量中,实际风向和读数风向之间的偏差。
随机偏差则是指在不同方位上的多次测量中风速读数的离散度。
二、误差修正方法1. 大气折射校正在大气折射方面,除非在风场测量中使用精密的气象观测系统,否则大气扰动只能通过数值模拟进行补偿。
目前,研究人员主要使用计算流体力学(CFD)模拟等方法解决大气折射问题。
其他方法包括在采样平面上插值,以及采用声学回波2. 地形扰动校正地形扰动校正是目前研究的重点和难点,主要有两个方向:扰动测量和算法校正。
在扰动测量方面,通过对地形的识别和特征提取,可以对扰动进行测量和重构,从而对风场测量产生的误差进行校正。
船载测风激光雷达校正算法

船载测风激光雷达校正算法全文共四篇示例,供读者参考第一篇示例:船载测风激光雷达是一种常用于气象、海洋等领域的测风技术,它通过利用激光束与空气中的颗粒相互作用并测量散射信号的时间延迟和频率偏移来获取风速和风向数据。
由于船载测风激光雷达在使用过程中受到船舶运动、震动等外部环境因素的影响,容易导致测风数据的不准确性和偏差。
校正算法的研究和应用对于保证测风数据的准确性至关重要。
一、激光雷达测风校正的背景和意义激光雷达测风校正的主要目的是消除外部环境因素对测风数据的干扰和影响,提高测风数据的准确性和可靠性。
通过校正算法,可以有效地消除船舶运动、震动等因素对测风数据的影响,使得测风数据更加准确、可靠,为气象、海洋等领域的研究和应用提供了可靠的数据支持。
目前,针对船载测风激光雷达数据校正的方法和技术有很多种,主要包括以下几种:1.船舶运动补偿算法:船舶在海上的运动会对激光雷达的测风数据产生干扰,通过运动补偿算法可以消除船舶运动对测风数据的影响,提高数据的准确性。
2.激光雷达自身误差校正:激光雷达自身存在一定的误差,需要通过校正算法对其进行校正,提高数据的精度和可靠性。
3.气象条件校正:气象条件如温度、湿度等也会对测风数据产生影响,通过气象条件校正算法可以消除气象因素对测风数据的影响,提高数据的准确性。
4.数据融合校正:将不同来源的数据进行融合,可以有效地提高数据的准确性和可靠性,降低数据误差。
三、船载测风激光雷达校正算法的发展趋势随着船载激光雷达技术的不断发展和完善,校正算法也在不断更新和改进。
未来,船载测风激光雷达校正算法的发展趋势主要包括以下几个方面:1.智能化校正算法:利用人工智能、机器学习等技术,开发智能化校正算法,实现对测风数据的自动校正和处理,提高校正效率和准确性。
2.多元素数据融合技术:将多种数据源进行融合,结合多元素数据融合技术,提高数据的准确性和可靠性,为气象、海洋等领域的研究和应用提供更为丰富的数据支持。
激光雷达测风技术4
VR > 0, w > 0, u > 0, v > 0
航天学院
相干激光测风雷达结构
Master oscillator (MO)是稳定单频连续激光器。移频器(AO-M)使发射 光束产生固定频偏。后向散射信号与MO混频产生差频信号,其中包 含散射体多普勒效应的径向速度。
光强变化量频移径向速度; 光强空间分布频移径向速度;
航天学院
原子吸收线:频率分析器
光强变化率与风速和温度变化曲线
航天学院
单边缘滤波器:频率分析器
航天学院
双边缘滤波器:频率分析器
航天学院
条纹图像:频率分析器
高分辨率光干涉仪产生空间辐照度分布,亦即代表接收面信号光谱 平均频率利用其中一个图样估计,即锁定峰值照度,计算照度分布 的一阶统计量,类似于被动干涉仪,利用同心环直径确定频移
2. 相干式(直接频率检测FFT) ➢ 外差技术 本振光与信号光 ➢ 自差技术 多频率发射光本身 ➢ 超外差技术 本振光与多频率信号光
航天学院
大气分子或气溶胶散射产生的多普勒频移
根据动量守恒和能量守恒定理:
大气分子或气溶胶散射产生的多普勒频移:
对于前向散射 对于后向散射
航天学院
原子吸收产生的多普勒频移
激光雷达测风技术(3)
航天学院
大气风场数据获得的手段
1. 地球表面观测系统 ➢ 地面、海面、风散射仪等,只能提供表面大气层的数据
2. 高空单层大气观测系统 ➢ 机载和星载的云图变化的风场推算数据,该方式覆盖范围受限
3. 高空多层大气观测系统 ➢ 无线电探空仪和卫星探测器,无线电探空仪能够提供风场的垂 直分布情况,但是它主要是在北半球的陆地,很难给出大覆盖 范围的观测数据
天基相干测风激光雷达技术分析

达 利 用 光 外 差 探 测 技 术 获 得 激 光 多普 勒 频 移 信 息 , 求取被测对 象的径向速度分量 , 较 之 传 统 的非 相 干 激 光 测 风 雷 达 ,
wi nd ie f l d pr of il e r di r ec t l y.The pr opos ed s pa ce—ba s ed co he r e nt Do ppl e r wi nd Li DAR ac ce s s e s t he t ar ge t D oppl er f r e que ncy s hi f t a nd c al cul at e s i t s l i ne—of —s i g ht ve l oc i t y us i ng l a s er he t e r od yne t e c hno l og y.Com par i ng wi t h t he t r a di t i onal Li D AR,i t ha s t he pr o mi ne nt f e a t ur es of hi gh s pa ce—t i me r e s ol ut i on a nd hi gh s ens i t i v i t y i n di me ns i on,
o f l a r g e — s c a l e wi n d ie f l d. L i g h t d e t e c t i o n a n d r a n g i n g( L i DAR)i s t h e s o l e i n s t r u me n t t o a c c e s s t h e t h r e e — d i me n s i o n
风电场机组激光雷达测风仪技术要求、测量场地地形评估、测风塔安装规范、湍流规格化功率曲线方法
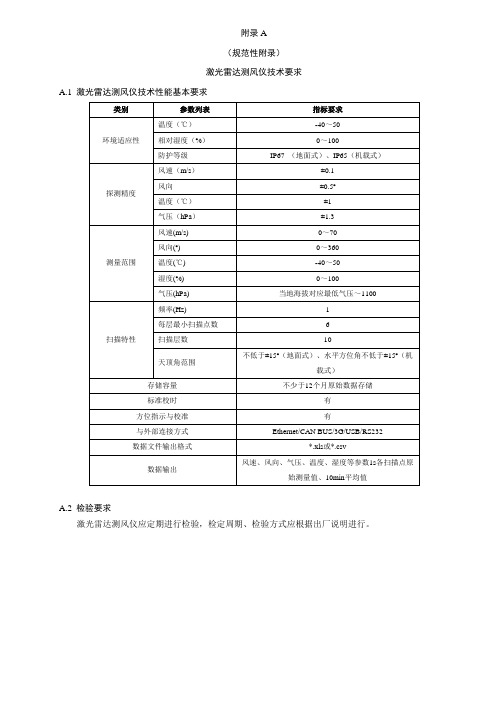
激光雷达测风仪技术要求A.1 激光雷达测风仪技术性能基本要求A.2 检验要求激光雷达测风仪应定期进行检验,检定周期、检验方式应根据出厂说明进行。
测量场地地形评估不进行标定的测量场地,应满足表B.1所列的条件。
表B.1 无需标定场地条件注释:1.定义的扇区如图B.1所示2.选择与扇区地形最吻合,并通过塔架基础的平面,该平面与实际地形之间的最大倾角,以及偏离平面的最大偏差,定义和计算方法如图B.2所示,倾角计算公式为:最大倾角0max()iiZ Z d -=(B.1) 地形偏离平面最大偏差0max()i Z Z =-(B.2)3.塔架基础与扇区内任一点连接线的最大倾角,倾角计算见公式(B.1),定义和计算方法如图B.3所示。
图B.1 测量扇区分布示意AB图B.2 与扇区地形最吻合的连接线的最大倾角和地形最大偏差AB8L 到16L 之间2L 到2L 量区域图B.3 通过塔架与扇区地形任一点连接平面与水平面之间的最大倾角附录C(规范性附录)测风塔安装规范C.1 一般规定C 1.1 选用的测风装置应经过标定,且在有效期内。
C 1.2 测风装置的安装应牢固、稳定。
C.2 顶部风速计的安装C 2.1 应将风速计安装在测风塔顶端1.5m以上,应通过一个垂直圆管固定风速计,圆管顶端以下1.5m段的直径应不大于风速计,圆管垂直度不大于2º。
C 2.2 风速计以下1.5m内不能存在其他气流干扰物,其他测量仪器应至少在风速计4m以下。
测风塔的任何部分都不能超过以风速计为顶端、以11倍测风塔侧边长度为底部直径的锥面外。
顶部风速计安装示意见图C.1。
图C.1 顶部风速计安装示意C.3 侧边风速计的安装C 3.1 侧边风速计应成使用,若横杆直径为d,测风仪应安装在横杆20d以上,推荐25d;两风速计应等高,相互间隙不小于2.5m且不大于4.0m。
C 3.2 应通过一个垂直圆管将风速计固定在横杆上,风速计以下1.5m内不能存在其他测量装置且风速计4m以下不能存在其他测量仪器。
激光雷达海上测风方案

WINDCUBE激光雷达海上测风方案北京莱维塞尔科技有限公司二零一二年目录引言 (2)第一部分海上单桩平台介绍 (3)一、桩体结构形式: (3)二、桩体俯视图 (4)三、桩体加工与运输 (4)四、施工介绍 (5)1、组织结构 (5)2、施工流程 (5)第二部分海上激光雷达介绍 (9)一、WINDCUBE激光雷达基本介绍 (9)1、主要特点: (9)2、应用领域: (11)3、评估认证: (11)4、Windcube 发展演变: (13)二、系统技术及性能指标 (14)2.1WINDCUBE技术原理 (14)2.2WINDCUBE系统组成 (14)2.3数据处理软件描述1、软件界面 (16)2.4系统技术指标 (20)四、可选模块说明 (20)1、WINDCUBE双供电系统-M50VP(甲醇燃料+太阳能板) (20)2、3G/SAT无线传输 (20)3、WINDCUBE CFD软件工程 (21)4、GPS安全跟踪系统 (23)5、PTU 传感器 (23)五、系统维护 (23)第三部分、成功应用案例及安装现场 (24)一、经典应用案例 (24)二、安装现场 (25)1、在孤岛上——悬崖边 (25)2、在灯塔上——Nass&Wind - Lighthouse (25)3、在大的海上平台上: RES ltd – platform (Race bank round 2) (26)4、在小的海上平台上-中国国电集团项目 (26)引言Windcbue海上激光雷达测风系统采用特殊设计的单桩独柱平台,加上轻巧便携的Windcube 激光雷达测风装置,配套供电系统、防雷系统、航标装置及辅助测风系统,形成一套完备的新型式海上测风体系。
与传统式海上测风塔相比,激光雷达海上测风系统特点如下:结构简单、安装方便施工周期短:传统式海上测风塔制作及施工复杂,时间基本上需要6个月左右;而单桩基础设计、制作及施工简单,施工面积小,只需要1个月就可以完成,激光雷达安装只需2天,因此,使工期大大缩短。
利用激光雷达对风的测量与分析在风力发电中的应用
利用激光雷达对风的测量与分析在风力发电中的应用摘要:风力发电是一种清洁、可再生的能源,激光雷达作为一种高精度、高可靠性的测量工具,在风力发电中得到了广泛的应用。
本文首先介绍了激光雷达的基本原理和风测量中的应用方法,然后详细讨论了激光雷达测量风速和风向的精度和可靠性。
接着,探讨了激光雷达在风能资源评估、风力发电机组的控制和风力发电场的运维管理等方面的应用。
通过本文的研究,能够为今后激光雷达对风的测量与分析在风力发电中的应用提供一定的参考与借鉴。
关键词:激光雷达;风力发电;风测量;风能资源评估随着环境保护意识的增强和对可再生能源的需求不断增加,风力发电作为一种清洁、可再生的能源得到了广泛的关注和应用。
风力发电的效率和稳定性对于其经济性和可持续性至关重要。
而激光雷达作为一种高精度、高可靠性的测量工具,可以提供准确的风速和风向数据,对于风力发电的运行和管理起到至关重要的作用。
一、激光雷达对风的测量原理和方法1.1 激光雷达的基本原理激光雷达是一种利用激光束进行测量的仪器,它可以通过测量光的传播时间来计算目标物体的距离。
激光雷达的基本原理是发射一束激光束,当激光束遇到目标物体时,会被目标物体反射回来,激光雷达接收到反射回来的激光束后,通过测量激光束的传播时间来计算目标物体的距离。
1.2 激光雷达在风测量中的应用方法激光雷达在风测量中的应用方法主要有两种:一种是通过测量激光束的传播时间来计算风速;另一种是通过测量激光束的偏转角度来计算风向。
1.3 激光雷达测量风速和风向的精度和可靠性激光雷达测量风速和风向的精度和可靠性主要受到以下几个因素的影响:激光雷达的精度、目标物体的反射特性、大气条件和测量距离。
二、激光雷达在风力发电中的应用2.1 激光雷达用于风能资源评估风能资源评估是确定风力发电场的可行性和优化布局的重要步骤。
激光雷达作为一种高精度、高可靠性的测量工具,在风能资源评估中发挥着关键的作用。
首先,激光雷达可以提供准确的风速和风向数据。
相干多普勒测风激光雷达的工作原理
相干多普勒测风激光雷达的工作原理
相干多普勒测风激光雷达是一种利用激光测量风速和风向的先
进技术。
它通过发射一束激光束,并接收被散射回来的激光信号来测量风速和风向。
激光束发射出去之后,会与空气中的颗粒发生散射,其中散射回来的信号会被接收并进行处理。
根据多普勒效应,当激光束与运动物体相遇时,激光波长会发生变化。
通过测量这种变化,可以确定物体的速度。
同样地,相干多普勒测风激光雷达也可以通过测量激光信号的多普勒频移来计算出空气中的流速。
通过不同的算法处理,可以将测量到的信号转换成实际的风速和风向数据。
这种激光雷达技术已经被广泛应用于气象、航空、海洋等领域,为人们提供了重要的气象信息和飞行导航支持。
- 1 -。
激光测风雷达介绍

激光测风雷达缺点:
1、产品成熟度不及测风塔,测风精确度有待进一步认证; 2、设备较为昂贵(国产60万左右,进口150万左右); 3、后期使用成本较高(每年调教一次约1~2万); 4、户外测风时存在被盗风险;
激光测风雷达使用场景:
1、测风塔代表性验证 在复杂地形区域,测风塔代表性难以满足风资源评估
注意:
需要注意的是,考虑到雷达测风大小风月和 时间一般不足一年的情况,及不同型号设备的环 境适应性问题,复杂山地雷达设备的应用现在仍 处于辅助测风阶段,雷达测风在复杂地形情况下 的不确定度有待进一步细化研究。
THANKS
要求,仅通过测风塔数据模拟得到的结果存在很大差异。 而通过激光雷达在风险区域实地测量,结合现有测量结果 和软件模拟对比,将有效识别风险区域的真实性,规避潜 在风险。
激光测风雷达使用场景:
2、功率曲线验证
激光雷达的灵活性、便携性,可更快速、有效对风机 的功率曲线进行确定或验证,对在实际运行环境下风机的 运行表现分析有重要意义。
激光测风雷达供应商:
1、北京
型号:Windcube V2 制造商:法国 价格:150万左右 产品参数:测量精度(0.1m/s)、采样频率(1s),测量 范围为40-300m; 产品尺寸:685*745*685mm,产品重量约66KG
激光测风雷达供应商:
型号:WindPrint V300 制造商:青岛 价格:80万左右 产品参数:产品测量精度(0.1m/s)、采样频率(1s), 测量范围为40-300m; 产品尺寸:产品重量约50KG
激光测风雷达简介
激光测风雷达简介:
激光测风雷达是用来测量高空风向、风速的雷 达。激光雷达测风作为新型的移动测风技术,利 用激光的多普勒频移原理,通过测量光波反射在 空气中遇到风运动的气溶胶粒子所产生的频率变 化得到风速、风向信息,从而计算出相应高度的 矢测量性能强大,满足40m~300m,12个高度层风参数据 测量 2、激光雷达数据获取方便灵活,可满足各种地形项目 数据测试(体积约560*570*550mm,重量约50kg); 2、激光雷达数据更丰富,可同时测得不同高度的水平、 垂直风速、风向数据,入流角等;
激光测风雷达
(9)
图 2.激光多普勒测风原理
多普勒测风激光雷达是利用光的多普勒效应, 测量激光光束在大气中传输其 回波信号的多普勒频移来反演不同高度处的风速分布。激光具有单色性、相干性 强的特点,而且波长较短,因此利用气溶胶的后向散射光,就能够获得足够强的 多普勒测风信息,有利于探测微风速,具有较高的测风精度。若大气气溶胶散射 粒子相对于光源运动, 则所接收气溶胶辐射的散射光频率不仅取决于照射光的频 率,而且还与气溶胶散射粒子相对于光源的运动速度、运动方向有关。根据公式 (9)可以表示为
ks
2 s λ
(15)
ki
2 i λ
(16)
如图 2 所示,利用散射光的频移ΔνD,即可根据式(14)求得沿 ks ki 方向上 的风速分量, 通常采用多普勒测风激光雷达测风,这是激光雷达接收的是大气和 气溶胶粒子的后向散射光,因此有 ki ks ,于是式(14)可以简化为:
ΔVD
根据时间相对性
' t2 t1' t2 t1 1 v / c
(5)
(6)
观测者接收的频率为
VD
而 Vs=
N N N 1 v / c ' ' (t2 t1 )(1 v cos / c) (t2 t1 )(1 v cos / c)
(7)
N t 2 '- t1' 故
(1)光的多普勒效应 当光源和观测者相对运动时,观测者接收到的光波频率不等于光源频率,这 就是光的多普勒效应。 光多普勒效应与声音多普勒效应本质上是不同的,声波依 赖于介质传播,而光波不依赖于任何介质传播。对于任何惯性系,光在真空中传 播速度都相同,所以,光源和观测者谁相对于谁运动是等价的,只取决于相对运 动的速度,下面按照狭义相对论的观点对光学多普勒效应进行分析。
雷达测风

大气物理学术语
目录
01 描述03Fra bibliotek测风雷达的分类及优 缺点
02 方法
通过雷达追踪装有主动或被动探测器的自由气球的移动,从而获得高空风的估计值的过程。
描述
用雷达定位技术测定高空风的方法,分为一次雷达测风和二次雷达测风两种。前者跟踪气球下面的反射靶定 位,后者跟踪探空仪的发射回答器定位。但是两者测定的都是目标的仰角、方位角和斜距。通过这三个参数,目 标的空间位置即可确定,因而可以独立计算出高空风 。
谢谢观看
图1风廓线雷达
二次雷达配备“无线电回答器”,接收雷达发射的“询问”脉冲后回以“回答”脉冲,这样的问答方式解决 了一次雷达耗能大、测距短的缺点,因此在目前业务中主要使用的是二次雷达。二次雷达追踪的目标是有源的, 即指目标物具有发射无线电波的能力,其测风就是通过追踪气象气球携带的回答器来实现的。二次雷达具有探测 精度高、采样速率快、使用方便等特点,实现高空气象探测仪器的数字化和自动化。
方法
雷达对高空风的测量,需要气象气球的配合。通过释放气象气球,追踪其空中运行轨迹,可以计算出高空风 的风向、风速。雷达的定位是根据仰角、方位角和斜距,相对于经纬仪通过仰角、方位角和高度对气球定位的方 法,雷达测风要简单得多。雷达天线发射出电磁波,电磁波在空中传播,遇到障碍物被反射回来,后被雷达天线 接收。因为电磁波在空中的传播速度是一定的,乘以雷达发射和接收电磁波的时间差,则可计算出雷达至目标物 的斜距。再借助雷达自身的测角系统,测定雷达与目标物之间的仰角和方位角,即可计算出风速和风向。
测风雷达的分类及优缺点
一次雷达
二次雷达
一次雷达追踪目标是一个无源反射体,如飞机、舰船等,目标物反射电磁波,雷达将其吸收作为回波信号。 但是一次雷达要求雷达发射机具有足够大的发射频率,耗电量大;探测距离较近;距离远时回波信号弱,无法满 足工作需求,因此在此基础上发展出了二次雷达。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矢量风速反演方法
1. 矢量风速V (u, v, w) 是少需要三个独立的径向速度估计 2. 理想情况下:矢量风速应该在空间某一点同时测量出它的三个方 向的速度值,即至少需要三部激光雷达系统 3. 实际情况下:确定风场的水平方向,利用激光雷达的扫描技术确 定风速的矢量。常用以下两种扫描技术: – 速度方位显示扫描技术(Velocity-azimuth-display, VAD),即激 光雷达光束以固定倾角进行圆锥形扫描 – 多普勒光束定向摆动扫描技术(Doppler-Beam-Swinging, DBS),即点激光雷达光束垂直指向并向东倾斜和向北倾斜
Laser
I − IL 1 ν d = ν −ν L = I 0 T ' (ν L )
ν
ν0 ν νL
T2(ν)
T1(ν) I01 Intensity
Backscattered signal IL I02 Laser
νd =
ν
1 I0
I 01 − I L I 02 − I L 1 I 01 − I 02 − & = T1 ' (ν L ) T2 ' (ν L ) I 0 T ' (ν L )
ν 中心 20
Etalon 1
Etalon 2
双通道F -P 标准具
Frequency
航天学院
NASA/Goddard车载测风激光雷达 车载测风激光雷达
参 数 激光器:波长 脉冲能量 重复频率 望远镜:口径 FOV 扫描方式 测量范围 距离分辨率
指 标 355nm 70mJ 50Hz 45cm 0.2mrad XY双轴半空间 1.8~35km 0.25km@<3km 1km@>3km
ν01 ν νL
ν02
航天学院
Mie散射和分子散射速度测量 散射和分子散射速度测量
Etalon 1 Etalon 2 Mie signal
ν 中心 10 ν 中心 20
双通道F-P 标准具
Rayleigh signal
Frequency
Mie signal
ν 中心 10
Rayleigh signal
f LO ± f sig
散射信号在窄带滤波时变得很强 精度:原则上没有偏差 测量准确性:不决定于风速
航天学院
直接探测测风技术
原理:不使用本振光进行解调,直接使用光频鉴频器或光谱分析仪, 将多普勒频移转变成光强/光功率的变化,或转化成光强/光功率的空 间分布;光频谱分辨仪器主要采用以下三种类型: (1)原子吸收线,例如Na、K和Fe,使用全部共振吸收谱线 (2)边缘滤波器,利用分子吸收线边缘发射(如I2吸收线),或光 干涉仪(如F-P标准具)边缘发射 (3)光干涉仪条纹图像(Fringe pattern imaging) (4)主要思路:光强变化率→频移→径向速度; 光强变化量→频移→径向速度; 光强空间分布→频移→径向速度;
激光雷达测风技术( ) 激光雷达测风技术(3)
航天学院
大气风场数据获得的手段
1. 地球表面观测系统 地面、海面、风散射仪等,只能提供表面大气层的数据 2. 高空单层大气观测系统 机载和星载的云图变化的风场推算数据,该方式覆盖范围受限 3. 高空多层大气观测系统 无线电探空仪和卫星探测器,无线电探空仪能够提供风场的垂 直分布情况,但是它主要是在北半球的陆地,很难给出大覆盖 范围的观测数据
1 µm
X3
0.355 µm 0.30-0.32 µm
OPO
泵浦
非相干 DIAL O3
高功率激光测高仪
航天学院
全球激光雷达探测战略( ) 全球激光雷达探测战略(2)
航天学院
WMO的全球风测量技术指标 的全球风测量技术指标
理想要求 单位 边界层 垂直范围 垂直分辨率 风分布数 风分布间距 时间采样 测量精度 水平积分区域 km km /hour km hour m/s km 1.5 0-2 0.1 对流层 2-16 0.5 30,000 50 3 1.5 50 2 5 平流层 16-30 2.0 低对流层 0-5 5 高对流层 5-16 10 100 >500 12 5 50 5 平流层 16-20 10 最低要求
航天学院
激光雷达的后向散射信号
大气粒子பைடு நூலகம்
信号 多普勒频移 发射激光 接收信号
风矢量
频率
接收信号 卷云
谱分析仪
发射激光 光子探测器
时间
航天学院
时间- 时间-空间的对应关系
c∆t ct ∆r = , r= 2 2 ∆t - - - 脉冲宽度或采样宽度 t - - - 测量周期
信号 多普勒频移 接收信号
航天学院
MOPA 与 SOPA 发射机比较
1. 种子注入再生放大和功率放大激光器 – “ SOPA is injection-seeded slave oscillator and power amplifier” – 种子激光是低功率的单频连续激光器 – 再生放大器是高功率调Q脉冲激光器 2. 主振荡和功率放大激光器 – MOPA is master oscillator and power amplifier. 3. 对于相干探测,发射机必须有非常窄的带宽(如1MHz) 4. 对于脉冲发射,必须有比较长的脉冲宽度,以便改善非常有限的 频谱宽度。
航天学院
欧洲航天局的ALADIN计划
航天学院
激光雷达测风技术发展趋势
工作波段趋向短波长 ⇐ 探测方式 ⇐ 工作波长 10µm µ 2µm µ 非 1.5µm µ Raman激光器 激光器 OPO-Nd:YAG Er激光器 激光器 相干 优点 宽带探测 可调谐本振 非相干 激光技术 Mie Rayleigh Mie Rayleigh 相 干 直 接 探 测 ⇒ 355nm ⇒
大气分子或气溶胶散射产生的多普勒频移
根据动量守恒和能量守恒定理:
大气分子或气溶胶散射产生的多普勒频移:
对于前向散射 对于后向散射
航天学院
原子吸收产生的多普勒频移
原子共振吸收频率为: 根据动量守恒和能量守恒定理:
多普勒频移为: 原子吸收截面由于多普勒频移而展宽:
航天学院
对于原子自发辐射有: 根据动量守恒和能量守恒定理:
Signal Intensity
aerosol signal molecular signal transmitted signal
sunlight
νL
Wavelength
航天学院
双F-P标准具多普勒检测 标准具多普勒检测
I I IL T(ν) Backscattered signal
Intensity
VR > 0, w > 0, u > 0, v > 0
航天学院
相干激光测风雷达结构
Master oscillator (MO)是稳定单频连续激光器。移频器(AO-M)使发射 光束产生固定频偏。后向散射信号与MO混频产生差频信号,其中包 含散射体多普勒效应的径向速度。
航天学院
相干激光测风雷达波长选择
航天学院
原子吸收线:频率分析器
光强变化率与风速和温度变化曲线
航天学院
单边缘滤波器: 单边缘滤波器:频率分析器
航天学院
双边缘滤波器: 双边缘滤波器:频率分析器
航天学院
条纹图像:频率分析器
高分辨率光干涉仪产生空间辐照度分布,亦即代表接收面信号光谱 平均频率利用其中一个图样估计,即锁定峰值照度,计算照度分布 的一阶统计量,类似于被动干涉仪,利用同心环直径确定频移
航天学院
多普勒激光雷达扫描技术:在底部,VAD扫描;在上部,DRS扫描
航天学院
VAD 扫描矢量风场反演
径向速度vR可以由v、u和w组成,纬度风速分量usinθcosϕ,子午线速 度分量vcos θcosϕ,垂直速度分量wsinϕ, θ-方位角,向北顺时针, ϕ 仰角。 对于VAD扫描:仰角ϕ是常量,方位角θ是变量,径向速度vR是测 量量,(u, v, w)满足下式:
上式还可表示为:
a:补偿量,b:振幅,θmax 周相位移动
航天学院
航天学院
DBS 扫描矢量风场反演
VRZ, VRE, VRN 分别是径向速度垂直、东向倾斜和北向倾斜分量
γ-天顶角 天顶角
航天学院
改进型DBS扫描矢量风场反演 扫描矢量风场反演 改进型
激光雷达波束分别是垂直向、向北、向东、向南和向西
航天学院
MAC地基测风激光雷达 地基测风激光雷达
参 数 激光器:波长 脉冲能量 重复频率 望远镜:口径 扫描方式 测量范围 距离分辨率
指 标 355nm, 532nm 400mJ 10Hz 50cm 经纬仪平台 0.5~20km 0.25km
航天学院
法国OHP观测站 观测站 法国
参 数 激光器:波长 脉冲能量 重复频率 望远镜:口径 FOV 扫描方式 测量范围 距离分辨率
发射激光
∆νd
频率
接收信号 强度
∆t ∆r
卷云
∆vd λ, v= 2 ∆vd - - - 多普勒频率
时间 t 距离r
发射激光 脉冲
λ - - - 激光波长
航天学院
后向散射信号的频谱
• 分子散射谱宽度~3.0GHz
• 气溶胶散射谱宽度~发射激光谱宽度(约90MHz)
Zero Doppler shift Doppler shift
指 标 532nm 330mJ 30Hz 4×50cm 0.1mrad 固定(3+1)方位 8~55km 0.15km
航天学院
ESA/ADM— Aeolus全球激光测风雷达 全球激光测风雷达
参 数 卫星轨道高度 轨道类型 俯角 有效天线口径 工作波长 发射机功率 高度范围(米+瑞 利) 垂直分辨率 水平积分长度 信号处理距离 指 标 平均400 km 极间太阳同步 35° 1.1 m 355 nm 13 W@100 Hz -1~26.5km (可扩 展) 1 km (可调) 3.5km (可调) 50 km