智能交通灯控制系统的设计和仿真
智能交通灯控制系统的设计与实现
智能交通灯控制系统的设计与实现随着城市化进程的加速,城市道路交通越来越拥堵,交通管理成为城市发展的一个重要组成部分。
传统的交通信号灯只具备固定时序控制交通流量的功能,但随着技术的进步和智能化应用的出现,要求交通信号灯具备实时性、自适应性和智能化,因此,智能交通信号灯控制系统应运而生。
本文将从软硬件系统方面,详细介绍智能交通灯控制系统的设计与实现。
一、硬件设计智能交通灯控制系统的硬件部分由四个部分组成:单片机系统、交通灯控制器、传感器及联网模块。
1. 单片机系统单片机是智能交通灯控制系统的核心,该系统选用了8位单片机,主要实现红绿灯状态的自适应和切换。
在设计时,需要根据具体情况选择型号和板子,选择时需要考虑其开发环境、风险和稳定性等因素。
2. 交通灯控制器交通灯控制器是智能交通灯控制系统中的另一个重要部分,主要实现交通信号的灯光控制。
在控制器的设计时,需要考虑网络连接、通信、数据传输等多方面因素,确保系统的稳定性和可靠性。
3. 传感器传感器主要负责采集道路交通信息,包括车辆数量、速度、方向和道路状态等,从而让智能交通灯控制系统更好地运作。
传感器有多种类型,包括磁感应传感器、摄像头、光电传感器等,需要根据实际需求选择。
4. 联网模块联网模块主要负责智能交通灯控制系统的联网和数据传输,包括存储和处理车流数据、上传和下载数据等。
在设计时,需要考虑网络连接的稳定性、数据安全等因素,确保智能交通灯控制系统的连续性和可靠性。
二、软件设计智能交通灯控制系统的软件部分主要由两部分组成:嵌入式系统和上位机系统。
1. 嵌入式系统嵌入式系统是智能交通灯控制系统的主体,主要设计车流量检测、信号灯状态切换等程序。
为了保证系统的自适应性和实时性,需要采用实时操作系统,如FreeRTOS等。
在软件设计阶段,需要注意设计合理的算法和模型,确保系统的准确性和稳定性。
2. 上位机系统上位机系统主要实现智能交通灯控制系统的监控和管理,包括车流量监控、灯光状态监控、信号灯切换和日志记录等。
智能交通灯控制系统的设计与实现
智能交通灯控制系统的设计与实现一、引言随着城市交通的不断拥堵,智能交通灯控制系统的设计与实现成为改善交通流量、减少交通事故的关键。
本文将对智能交通灯控制系统的设计原理和实际应用进行深入探讨。
二、智能交通灯控制系统的设计原理智能交通灯控制系统的设计原理主要包括实时数据收集、交通流量分析和信号灯控制决策三个方面。
2.1 实时数据收集智能交通灯控制系统通过传感器、摄像头等设备实时采集车辆和行人的信息,包括车辆数量、车速、行人密度等。
这些数据可以通过无线通信技术传输到中央服务器进行处理。
2.2 交通流量分析在中央服务器上,通过对实时数据进行分析处理,可以得到不同道路的交通流量情况。
交通流量分析可以包括车辆流量、行人流量、车速和拥堵程度等指标,为后续的信号灯控制提供依据。
2.3 信号灯控制决策基于交通流量分析结果,智能交通灯控制系统可以根据交通状况智能地决定信号灯的开启和关闭时间。
优化的信号灯控制策略可以使车辆和行人的通行效率达到最大化。
三、智能交通灯控制系统的实现智能交通灯控制系统的实现需要使用计算机技术、通信技术和物联网技术等多种技术手段。
3.1 计算机技术的应用智能交通灯控制系统中的中央服务器需要配置高性能的计算机系统,以支持实时数据的处理和交通流量分析。
同时,通过计算机系统可以实现信号灯控制策略的优化算法。
3.2 通信技术的应用智能交通灯控制系统需要使用通信技术实现各个交通灯和中央服务器之间的数据传输。
传统的有线通信和无线通信技术都可以应用于智能交通灯控制系统中,以实现数据的实时传输。
3.3 物联网技术的应用智能交通灯控制系统可以通过物联网技术实现与交通工具和行人之间的连接。
车辆和行人可以通过智能终端设备向交通灯发送信号,交通灯可以实时地根据这些信号做出相应的决策。
四、智能交通灯控制系统的实际应用智能交通灯控制系统已经在一些城市得到了广泛的应用。
4.1 交通拥堵减少智能交通灯控制系统根据实时的交通流量情况,可以合理地分配交通信号灯的开启和关闭时间,从而避免了交通拥堵现象的发生,提高了道路的通行效率。
智能交通灯控制系统的设计和仿真 3

王灿 ,等 :智能交通灯控制系统的设计和仿真
85
量检测工具 。 城市中典型的交叉路口为双向 6车道 ,如图 1所示 ,每个方向第 1、第 2和第 3车道分别为右转 、直行和
左转车道 。在每个车道的远侧和近侧分别埋设一个压力传感器检测车流量数据 ,两个检测器之间为各车道 的检测区 ,设定这一距离为 100 m。远侧检测器执行通行车辆数加操作 ,近侧检测器执行减操作 ,这样任意 时刻检测区获得的数据即为该方向等待放行的车辆数 。当某一相位绿灯亮时 ,系统将该车道收集的数据存 储 ,作为判断交通状态和决定下一周期通行时间的依据 。
参考文献 :
[ 1 ] 徐冬玲. 交通控制的 Fuzzy控制及神经网络的实现 [ J ]. 信息与控制 , 1992, 21 (2) : 74 - 79 [ 2 ] 陈森发 ,徐吉谦 ,陈洪. 城市主干道交通信号灯模糊线控制的探讨 [ J ]. 运筹与管理 , 1998, 4 (1) : 36 - 37 [ 3 ] 陈森发 ,陈洪 ,徐吉谦. 城市单路口交通的两级模糊控制及其仿真 [ J ]. 系统仿真学报 , 1998, 4 (10) : 35 - 40 [ 4 ] GAO J , L I J . M ultiphase fuzzy control under hybrid trafic flow of single intersection[A ]. Intelligent Transportation System s 2003
+ P4
这里 , T是设定的周期 ,取为 120 s。
3 计算机仿真
交通灯方案的优劣以平均车辆延误时间为依据 ,据此 ,使用 MATLAB 软件编制了仿真程序 (图 2) ,对
图 2 仿真程序流程图
智能交通信号灯控制系统设计与实现

智能交通信号灯控制系统设计与实现随着城市化进程的不断加快,交通拥堵问题也日益突出,这也使得人们对交通信号灯的控制以及优化变得越来越关注。
智能交通信号灯作为一种新型的交通控制系统,其最大的优势在于提高了交通效率和管理能力。
本文将介绍如何设计和实现智能交通信号灯控制系统。
1 智能交通信号灯的原理智能交通信号灯是通过网络控制单元,实现对各个交叉口的信号灯的控制。
当交通拥堵时,系统会根据实时交通数据进行优化调整,降低道路的拥堵程度,提高交通的效率。
智能交通信号灯主要由三个部分组成:传感器、控制器和信号灯。
①传感器:可以检测车流量、车速和人行道行人数量等交通信息。
②控制器:是智能交通信号灯的核心部分,用于控制各个交通路口的信号灯,根据从传感器获得的数据来控制信号灯的显示状态。
③信号灯:根据控制器的指示来实时显示交通灯的状态。
2 智能交通信号灯优势智能交通信号灯主要具有以下优势:①提高交通效率:普通交通灯只能按照设定的固定时长来控制交通流量,而智能交通信号灯采用实时数据感知,能够根据交通流量和方向进行自适应控制,提高交通效率。
②缓解交通拥堵:智能交通信号灯在交通拥堵的时候,会自动调整控制方案,从而尽可能地缓解道路拥堵状况。
③降低交通事故发生率:智能交通信号灯通过实时监测交通情况,减少了不必要的交通信号灯的切换,让道路行驶更加稳定,从而减少了交通事故的发生率。
3 智能交通信号灯的设计与实现智能交通信号灯的设计和实现需要以下几个步骤:①设定交通流量检测机制通过使用传感器技术,检测车道上的车辆数量和记录其速度,获得实时交通数据,用于智能交通信号灯的控制。
②设计控制算法算法主要用于根据获得的实时数据,进行信号控制和灯光切换,以提高道路通行效率。
如控制算法包括最短路径控制、动态调整时间控制、压力均衡控制和优先级控制。
③信号灯控制器设计智能交通信号灯控制器是系统中最核心的设备,它主要负责实时运算交通状态和时间的关系,实现最优的信号灯控制策略,确保信号灯显示时的安全性和效率。
基于Proteus的智能交通灯设计与仿真实现

基于Proteus的智能交通灯设计与仿真实现智能交通灯是一种通过传感器和智能控制系统实现交通信号灯的智能化管理,能够根据交通流量和道路状况进行智能调控,以提高交通效率和减少交通堵塞。
本文将基于Proteus软件进行智能交通灯的设计和仿真实现。
首先,我们需要明确智能交通灯的基本功能和设计要求。
智能交通灯主要需要实现以下功能:1.根据交通流量进行智能控制。
通过传感器检测道路上的交通流量,智能交通灯可以根据实时的交通情况智能地调整信号灯的时间,以提高交通效率。
2.考虑不同道路的优先级。
在交叉路口附近,智能交通灯需要根据不同道路的优先级来调整信号灯的时间,以确保交通的顺畅和安全。
3.考虑行人的过马路需求。
智能交通灯需要合理地安排行人的过马路时间,以保证行人的安全和顺畅。
接下来,我们将使用Proteus软件进行智能交通灯的设计和仿真实现。
Proteus是一款电子电路设计和仿真软件,可以用来模拟和验证电子电路的性能和功能。
首先,我们需要设计智能交通灯的硬件电路。
在Proteus中,我们可以使用元器件库中的LED灯和开关等元件来构建交通灯的电路。
同时,我们还需要添加传感器来检测交通流量和行人的需求。
在设计电路的过程中,我们需要考虑不同道路的优先级和行人的过马路需求。
根据道路的优先级,我们可以设置不同道路对应的信号灯的亮灭时间。
同时,我们还可以设置传感器来检测行人的需求,以在需要的时候提供行人过马路的时间。
完成电路设计后,我们可以使用Proteus中的仿真功能来验证电路的性能和功能。
在仿真过程中,可以模拟不同道路的交通流量和行人的过马路需求,以观察交通灯是否能够根据实时情况进行智能调控。
在仿真过程中,我们可以观察交通灯的状态变化和信号灯的亮灭时间,以评估交通灯的性能和效果。
如果发现问题,我们可以对电路进行调整和优化,以提升交通灯的智能化管理能力。
总结起来,基于Proteus的智能交通灯设计和仿真实现是一种高效且可靠的方法。
智能交通灯控制系统设计
智能交通灯控制系统设计
1. 介绍
智能交通灯控制系统是一种基于现代技术的交通管理系统,旨在提高交通效率、减少交通拥堵和事故发生率。
本文将探讨智能交通灯控制系统的设计原理、功能模块和实现方法。
2. 设计原理
智能交通灯控制系统的设计原理主要包括以下几个方面: - 传感器检测:通过各类传感器实时监测路口车辆和行人情况,获取交通流量信息。
- 数据处理:将传感器采集到的数据经过处理分析,确定交通信号灯的相位和时长。
- 控制策略:根据不同情况制定合理的交通信号灯控制策略,优化交通流动。
3. 功能模块
智能交通灯控制系统通常包括以下几个功能模块: - 传感器模块:负责采集交通流量数据,如车辆和行人信息。
- 数据处理模块:对传
感器采集的数据进行处理和分析,生成交通控制方案。
- 控制模块:
实现交通信号灯的控制,根据控制策略调整信号灯状态。
- 通信模块:与其他交通设备或中心平台进行通信,实现数据共享和协调控制。
4. 实现方法
实现智能交通灯控制系统主要有以下几种方法: - 基于传统控制
算法:采用定时控制、车辆感应等方式设计交通灯控制系统。
- 基于
人工智能:利用深度学习等技术处理大量数据,实现智能化交通灯控制。
- 基于物联网技术:通过物联网技术实现交通信号灯与其他设备
的连接和信息共享,提高交通系统的整体效率。
5. 结论
智能交通灯控制系统的设计可以有效优化交通信号灯的控制策略,提高交通效率和安全性。
结合现代技术的发展,智能交通灯控制系统
将在未来得到更广泛的应用和发展。
基于单片机的智能交通信号灯控制系统设计及仿真

基于单片机的智能交通信号灯控制系统设计及仿真一、本文概述随着城市化进程的加快和汽车保有量的不断增加,交通拥堵和交通事故问题日益突出,智能交通信号灯控制系统的研究和应用显得尤为重要。
本文旨在设计并仿真一种基于单片机的智能交通信号灯控制系统,以提高交通流通效率,减少交通事故,并优化城市交通环境。
本文首先介绍了智能交通信号灯控制系统的研究背景和意义,阐述了单片机在交通信号灯控制中的应用优势。
接着,详细阐述了系统的总体设计方案,包括硬件设计和软件设计两大部分。
硬件设计部分主要介绍了单片机选型、外围电路设计以及信号灯的选型与连接方式;软件设计部分则主要介绍了交通信号灯控制算法的设计和实现,包括交通流量的检测、信号灯的调度策略以及控制逻辑的编写。
在完成系统设计后,本文进一步进行了仿真实验,以验证系统的可行性和有效性。
仿真实验采用了交通仿真软件,模拟了不同交通场景下的信号灯控制效果,并对仿真结果进行了详细的分析和讨论。
本文的研究成果对于推动智能交通信号灯控制技术的发展具有一定的理论价值和实际应用价值,对于缓解城市交通问题、提高交通效率具有积极意义。
二、智能交通信号灯控制系统总体设计在智能交通信号灯控制系统的设计中,我们首先需要明确系统的总体架构和功能模块。
基于单片机的设计思路,我们将系统划分为几个关键部分:信号控制模块、传感器数据采集模块、通信模块以及电源管理模块。
信号控制模块:这是整个系统的核心部分,负责根据交通流量和道路状况实时调整交通信号灯的状态。
我们选用高性能的单片机作为控制器,通过编程实现多种交通控制策略,如固定时序控制、感应控制和自适应控制等。
传感器数据采集模块:为了实时感知道路交通状况,我们采用了多种传感器,如红外传感器、车辆检测传感器和摄像头等。
这些传感器负责采集道路上的车辆数量、速度和方向等信息,并将数据传递给信号控制模块进行处理。
通信模块:为了实现智能交通信号灯之间的联动和与交通管理中心的通信,我们设计了通信模块。
交通灯信号控制器仿真设计
交通灯信号控制器仿真设计交通灯信号控制器是城市道路交通管理系统中的重要组成部分,通过控制交通信号灯的变换来指挥车辆和行人的通行,以确保交通有序、安全、高效。
为了提高交通信号控制器的性能和稳定性,通常会进行仿真设计来对其进行优化和测试。
本文将介绍交通灯信号控制器的仿真设计过程,并详细讨论其原理和实现方法。
一、交通灯信号控制器的原理在城市道路交通中,交通灯信号控制器需要根据路口的车流量和行人需求来确定每个方向的绿灯时间,以实现交通的高效通行。
同时,还需要考虑到不同时间段交通流量的变化,灵活地调整交通信号的变换时间,以达到最佳的交通控制效果。
二、交通灯信号控制器的仿真设计方法1.确定仿真目标:首先需要明确交通灯信号控制器的仿真目标,包括优化绿灯时间、减少等待时间、提高交通效率等指标。
根据这些目标,确定仿真模型的概要设计和实现方法。
2.建立仿真模型:根据交通灯信号控制器的原理和实际运行情况,建立相应的仿真模型。
这包括车辆和行人的动态模型、交通信号灯的工作模式、路口的拓扑结构等方面。
3.设定仿真参数:确定仿真所需的参数,包括车辆流量、行人需求、信号灯变换时间、路口长度等。
根据实际情况,设定合理的参数范围,以确保仿真结果的准确性。
4.编写仿真程序:利用仿真软件或编程语言,编写交通灯信号控制器的仿真程序。
根据建立的模型和设定的参数,模拟不同情况下的交通流量和信号控制效果,评估控制器的性能和稳定性。
5.优化设计方案:根据仿真结果,对交通灯信号控制器的设计方案进行优化和改进。
可以调整绿灯时间、增加延时器、改变信号灯的配时等方法,以提高交通控制效果。
6.验证仿真结果:对优化后的设计方案进行验证,检验其效果和可靠性。
通过对比仿真结果和实际数据,评估交通灯信号控制器的性能和稳定性。
三、交通灯信号控制器的仿真设计案例以市中心的交通路口为例,设计一个交通灯信号控制器的仿真方案。
该路口存在车辆和行人的交通需求,需要根据不同时段的交通流量来控制信号灯的变换,以确保交通有序通行。
智能交通灯PLC控制系统的设计
智能交通灯PLC控制系统的设计一、本文概述随着城市化的快速发展,交通拥堵和交通事故的问题日益严重,智能交通系统因此应运而生。
作为智能交通系统的重要组成部分,智能交通灯控制系统在提高道路通行效率、保障交通安全方面发挥着至关重要的作用。
本文将对基于PLC(可编程逻辑控制器)的智能交通灯控制系统设计进行深入探讨,旨在通过技术创新提高交通管理效率,优化城市交通环境。
本文将首先介绍智能交通灯PLC控制系统的基本概念和原理,阐述其相较于传统交通灯控制系统的优势。
接着,将详细论述系统的设计过程,包括硬件选型、软件编程、系统架构搭建等关键环节。
还将探讨该系统的实际应用效果,分析其对交通流量、交通安全等方面的影响。
通过本文的研究,期望能够为智能交通灯PLC控制系统的设计提供有益的参考和借鉴,推动城市交通管理向更加智能化、高效化的方向发展。
也希望本文的研究能够为相关领域的技术创新和应用提供有益的启示和思路。
二、PLC基础知识介绍可编程逻辑控制器(Programmable Logic Controller,简称PLC)是一种专为工业环境设计的数字运算电子系统,用于实现逻辑控制、顺序控制、定时、计数和算术运算等操作的指令,并通过数字或模拟的输入/输出控制各种类型的机械设备或生产过程。
自20世纪60年代诞生以来,PLC以其高可靠性、强大的功能、灵活的配置和易于编程的特点,在工业控制领域得到了广泛应用。
PLC的基本结构主要包括中央处理器(CPU)、存储器、输入/输出(I/O)接口、电源以及通信接口等部分。
其中,CPU是PLC的核心,负责执行用户程序、处理数据、控制I/O接口等任务;存储器用于存储系统程序、用户程序及工作数据;I/O接口用于与外部的输入/输出设备连接,实现与外部世界的交互;电源为PLC提供稳定的工作电压;通信接口则用于PLC与其他设备或系统的数据交换和通信。
PLC的编程语言主要有梯形图(Ladder Diagram)、指令表(Instruction List)、功能块图(Function Block Diagram)等,这些语言直观、易学,方便工程师进行编程和调试。
基于单片机的智能交通灯控制系统设计与实现

基于单片机的智能交通灯控制系统设计与实现智能交通灯控制系统是一个基于单片机技术的交通管理系统,通过智能化的控制算法和传感器设备来实现交通信号的自动控制,提高交通效率和安全性。
下面将详细介绍智能交通灯控制系统的设计与实现。
首先,智能交通灯控制系统需要使用一种合适的单片机进行控制。
在选择单片机时,需要考虑处理性能、输入输出接口的数量和类型,以及对实时性的要求。
一般来说,常用的单片机有STM32、Arduino等。
在本设计中,我们选择了STM32作为控制器。
其次,智能交通灯控制系统需要使用多个传感器设备来感知各个方向上的交通情况。
常用的传感器包括车辆识别感应器、红外线传感器和摄像头等。
这些传感器可以通过GPIO和串口等接口与单片机进行连接,并通过单片机的开发板上电路来提供供电和信号转换。
接下来,智能交通灯控制系统需要设计一个合适的算法来根据传感器的输入数据进行交通灯的控制。
在设计算法时,需要考虑各个方向上的交通情况、优先级和交通流量等因素。
一个常见的算法是基于信号配时的方式,通过设置不同的绿灯时间来实现交通流量的优化。
此外,智能交通灯控制系统还需要具备良好的用户界面,方便交通管理员进行参数设置和监控。
可以使用LCD屏幕显示当前的交通灯状态和交通流量等信息,通过按键和旋钮等输入设备进行操作。
在实现智能交通灯控制系统的过程中,需要进行软件和硬件的开发。
软件开发涵盖了单片机程序的编写,包括传感器数据的采集和处理、交通灯状态的控制和显示等。
硬件开发涵盖了电路的设计和制作,包括传感器的接口电路、电源管理电路和输入输出控制电路等。
最后,在实现智能交通灯控制系统后,需要进行测试和调试。
通过对系统进行功能测试和性能测试,检验系统的稳定性和可靠性。
在实际应用中,还需要考虑交通流量的变化和高峰时段的处理,以及与其他系统的接口和数据交互。
综上所述,基于单片机的智能交通灯控制系统设计与实现需要考虑单片机的选择、传感器设备的使用、控制算法的设计、用户界面的设计、软件和硬件开发等环节。
智能交通信号控制系统的设计与仿真方法
智能交通信号控制系统的设计与仿真方法智能交通信号控制系统(Intelligent Traffic SignalControl System,简称ITSCS)是基于人工智能和计算机技术的创新应用,旨在优化城市道路交通流,减少交通堵塞、减少能源消耗和排放,提升交通效率和行车安全。
本文将介绍智能交通信号控制系统的设计原理和仿真方法。
一、智能交通信号控制系统的设计原理智能交通信号控制系统主要由感知模块、决策与控制模块以及通信与协调模块三部分组成。
感知模块负责采集和处理交通信息,包括车辆数量、车速、行驶轨迹等数据。
决策与控制模块根据感知模块提供的数据进行决策,并生成最优的信号控制策略。
通信与协调模块负责与其他交通系统进行信息交互和协调,例如与交通警察、公交系统、环境监测系统等的协调。
在设计智能交通信号控制系统时,首先需要建立一个交通模型,模拟交通流的动态变化。
这个模型可以基于现实数据进行建模,也可以通过仿真软件进行模拟。
模型的建立将交通系统抽象为一组节点和连接的网络,每个节点代表一个交叉口或路段,连接表示车辆的流动路径。
通过模拟交通流的行为,我们可以在不同的交通状况下评估和优化信号控制策略。
二、智能交通信号控制系统的仿真方法1. 定义仿真场景和变量:仿真系统应根据实际的交通网络和信号灯配置,设置仿真的场景和变量。
需要考虑的因素包括道路的长度、车辆的流量、车辆的速度、以及输入输出的时间间隔等。
2. 定义车辆行为模型:车辆行为模型是指车辆在仿真系统中的行驶规则。
常见的车辆行为模型包括Mobil模型、IDM模型等。
这些模型是根据车辆的加速度、速度、位置等参数来描述车辆行驶的机制,可以准确地模拟车辆之间的交互和行驶行为。
3. 信号灯控制策略设计:设计适应于不同交通状况的信号灯控制策略是智能交通信号控制系统的核心。
在仿真系统中,可以根据交通模型和车辆行为模型,使用优化算法来生成最优的信号控制策略,以实现交通流的最大化。
智能交通灯管理系统的设计和实现
智能交通灯管理系统的设计和实现随着人们生活水平的提高,城市内的机动车数量以及人员流量越来越大,为了保障交通的安全与便捷,智能交通灯管理系统应运而生。
一、设计目的智能交通灯管理系统旨在提供全面的交通管控方案,包括车辆与行人流量的监测、智能绿灯时间的调配及异常情况处理。
其设计目的主要包括以下方面:1.提高交通流量的效率,缓解交通拥堵问题;2.提升交通安全水平,降低交通事故发生率;3.智能化管理,让公共交通更便捷、更经济。
二、设计要点交通灯控制系统是智能交通灯管理系统中最为重要的组成部分之一,其设计要点如下:1.车辆或行人流量监测传感器的安装,以物联网技术进行相互连接;2.建立基于流量检测的交通管理模型,实现对路口互动信息的监测及分析;3.对路口交通信息进行分析,实时计算绿灯时间,并根据交通流量实时调配绿灯时间,以实现绿灯变换更加科学合理;4.针对复杂路口,对智能交通灯控制系统进行优化升级,提高交通流量效率。
三、实现方法智能交通灯管理系统的实现方法大致可以分为以下几个步骤:1.使用传感器捕捉路口的行人和车辆数据,将数据传输到后端系统数据处理系统;2.在后端数据处理系统中,使用大数据分析技术对传感器收集数据进行分析;3.在数据分析阶段,系统会根据路口流量状况设计最优的路口信号时间表;4.通过这样的优化,绿灯时间将会更加合适,不仅缓解了路口拥堵,还提高了交通生产力;5.系统持续进行数据的分析和优化,以逐步优化路口信号的性能和效率。
四、优点及前景智能交通灯管理系统相对于传统的交通灯控制系统,具有以下优点:1.更加科学合理,绿灯时间更加准确、合理而且比较符合实际;2.实时监测路口的交通流量、车辆与行人,及时采取最适宜的灯光变换方案;3.减少路口拥堵情况,提升了交通流量效率,缩短了人们等待的时间。
随着智能技术的迅速发展,智能交通灯管理系统在未来有着广阔的前景和市场。
未来智能交通灯管理系统将会成为人们日常交通中不可或缺的一部分,并成为城市智能化建设的基石之一。
智能交通信号控制系统设计与仿真

智能交通信号控制系统设计与仿真随着城市交通日益拥堵,如何提高道路交通效率,降低交通事故发生率成为了亟待解决的问题。
智能交通信号控制系统是一种基于现代信息技术的交通管理系统,通过对道路的监测和信号控制的智能化,能够实现交通流的优化调度,提高道路利用效率,减少交通拥堵和事故的发生。
智能交通信号控制系统设计与仿真是一种通过计算机模拟交通流量、信号控制的过程,以评估交通信号控制系统性能的方法。
通过仿真,可以模拟不同的交通流量分布情况,研究不同的交通信号配时方案,评估系统的性能,从而为实际的交通信号控制系统的设计提供依据和参考。
首先,智能交通信号控制系统的设计需要对交通流量进行调查和分析。
通过采集交通流量数据,包括车辆数量、速度、车道占用等信息,可以了解交通拥堵的原因和程度,为之后的仿真建模提供准确的输入数据。
此外,还需要对道路的结构和布局进行调查,包括车道数量、交通流量峰值分布、路口形状等,以便进行仿真建模和信号配时方案的设计。
其次,基于收集的数据,开始进行仿真建模与场景设计。
利用专业的仿真软件,如VISSIM、SUMO等,可以模拟不同的交通流量场景,并根据实际情况设置合理的车辆生成、通行规则和交叉口设置等。
通过控制交通信号的配时方案,可以实现交通拥堵状态的缓解和交通流的优化。
设计不同的仿真场景和排队长度、红绿灯时长等参数的变化,可以评估不同方案下的交通流量、延误程度以及车辆通过交叉口的平均时间等指标,为实际的信号控制系统提供参考。
在智能交通信号控制系统的设计中,需要考虑到不同交通参与者的需求。
例如,公共汽车、救护车等特殊车辆需要优先通行,对于步行者和骑行者也需要进行合理的安排和保障。
通过仿真,可以模拟这些不同的交通参与者的行为和需求,优化信号配时方案,提高交通流量的通行能力。
最后,进行仿真实验与评估。
通过比对不同仿真场景下的性能指标,如交通通行能力、延误程度、平均通行时间等,可以评估不同信号控制方案的优劣,并选择最优方案作为实际交通信号控制系统的设计依据。
智能交通灯控制系统的设计与实现

智能交通灯控制系统的设计与实现一、引言作为城市交通中的重要组成部分,交通信号灯的作用是为不同方向的车辆和行人提供交通指引,确保道路交通的有序和安全。
然而,传统的交通信号灯仅基于预设的时间表来控制灯光变化,无法灵活应对实际交通情况,同时也无法最大限度地提高路口的通行效率。
为解决这些问题,智能交通灯控制系统应运而生。
二、智能交通灯控制系统的基本原理智能交通灯控制系统是一种基于网络技术和计算机智能化算法实现的灯光控制方案。
该系统通过安装在路口的传感器和监测设备,实时获取交通流量、车辆类型、行驶速度等交通情况,并通过计算机算法实现对交通灯信号的控制。
系统的核心控制模块包括交通流量探测器、控制器和信号灯。
交通流量探测器可以通过地感、摄像头等设备实现车辆、行人等的流量监测和目标识别。
控制器负责实时监控路口的交通情况,同时通过算法计算出最优的灯光变化方案来控制交通信号灯的变化。
信号灯则根据控制器的指令,通过控制灯光的亮灭,来引导车辆、行人的通行。
三、智能交通灯控制系统的控制策略智能交通灯控制系统的控制策略包括传统的定时控制策略和基于实时交通情况的智能控制策略。
其中,传统的定时控制策略是基于预设时间表的控制方案,简单易行,但是在交通流量变化频繁的路口效果不佳。
智能控制策略的基本原理是通过实时监测路口的交通情况来动态调整交通信号灯的变化策略,以最大限度地提高路口的通行效率。
根据交通流量和实时情况,智能控制策略可分为四种基本类型:1.固定时间间隔算法:该算法是传统的定时控制策略的改进版,通过不断调整定时间隔实现最优化的灯光控制。
2.基于流量监测的算法:该算法通过实时检测车辆和行人的流量,动态调整灯光变化策略,使流量较大的方向获得更多的通行时间。
3.基于车速监测的算法:该算法通过监测车辆行驶速度来预估车辆到达时间,从而使交通信号灯在车辆到达前适时变化。
4.基于优先级的算法:该算法可以根据特定车辆(如公交车,救护车等)的优先级,使其获得更多的通行时间。
智能交通灯控制系统的设计与模拟
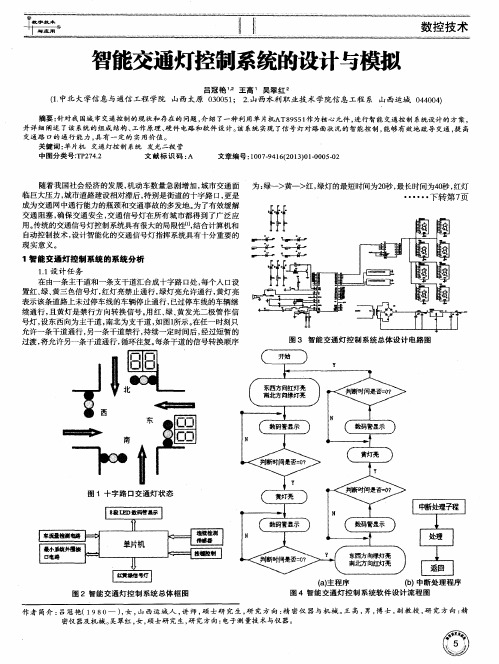
智能交通灯控制系统的设计与模拟摘要:针对我国城市交通控制的现状和存在的问题,介绍了一种利用单片机at89s51作为核心元件,进行智能交通控制系统设计的方案,并详细阐述了该系统的组成结构、工作原理、硬件电路和软件设计。
该系统实现了信号灯对路面状况的智能控制,能够有效地疏导交通,提高交通路口的通行能力,具有一定的实用价值。
关键词:单片机交通灯控制系统发光二极管中图分类号:tp274.2 文献标识码:a 文章编号:1007-9416(2013)01-0005-02随着我国社会经济的发展,机动车数量急剧增加,城市交通面临巨大压力,城市道路建设相对滞后,特别是街道的十字路口,更是成为交通网中通行能力的瓶颈和交通事故的多发地。
为了有效缓解交通阻塞,确保交通安全,交通信号灯在所有城市都得到了广泛应用。
传统的交通信号灯控制系统具有很大的局限性[1],结合计算机和自动控制技术,设计智能化的交通信号灯指挥系统具有十分重要的现实意义。
1 智能交通灯控制系统的系统分析1.1 设计任务在由一条主干道和一条支干道汇合成十字路口处,每个入口设置红、绿、黄三色信号灯,红灯亮禁止通行,绿灯亮允许通行,黄灯亮表示该条道路上未过停车线的车辆停止通行,已过停车线的车辆继续通行,且黄灯是禁行方向转换信号。
用红、绿、黄发光二极管作信号灯,设东西向为主干道,南北为支干道,如图1所示。
在任一时刻只允许一条干道通行,另一条干道禁行,持续一定时间后,经过短暂的过渡,将允许另一条干道通行,循环往复。
每条干道的信号转换顺序为:绿—>黄—>红,绿灯的最短时间为20秒,最长时间为40秒,红灯最短时间为25秒,最长时间为45秒,黄灯时间为5秒。
1.2 系统的体系结构及其功能该系统由单片机、车流量检测模块、违规检测模块、按键设置模块、信号灯状态模块、led倒计时模块组成最小控制系统,如图2所示[2]。
采用单片机作为控制核心,直接控制信号灯的状态变化,可以实现基本的交通指挥功能。
智能交通灯控制系统的设计与模拟
露
苎 ! 黪
。 l与 应 用
数 控 技 术
} v o i d t i me 0 ()i n t e r r u 【 p t 1 { TL 0 = ( 6 5 5 3 6 - 5 0 0 ) %2 5 6 ; TH0 =( 6 5 5 3 6 — 5 0 0 ) / 2 5 6 ;
数 控 技 术
智能交通灯控制系统的设计与模拟
吕冠 艳 王 高 吴 翠 红
( 1 冲 北 大 学信 息与通 信 工程 学 院 山西 太原 0 3 0 0 5 1 ; 2 . 山 西水利 职 业技 术 学 院信 息工程 系 山西运 城 0 4 4 0 0 4 )
摘要: 针 对我 国城 市交通 控制 的现 状 和存 在 的 问题 , 介绍 了一种 利 用单 片机AT 8 9 s 5 1 作 为核 心 元件 , 进 行智 能 交通控 制 系统设计 的 方案 , 并详 细 阐述 了该 系统 的 组成 结 构 、 工 作原 理 、 硬 件 电路 和软 件 设 计 。 该 系统 实现 了信 号 灯 对路 面状 况的 智能 控 制 , 能 够有 效 地疏 导 交通 , 提高 交通 路 口的 通行 能 力 , 具 有 一 定 的 实用 价值 。 关键 词 : 单 片机 交通灯 控制 系统 发光 二板 管
中 图分 类号 : T P 2 7 4 . 2 文献标识码 : A 文章 编号 : 1 0 0 7 - 9 41 6 ( 2 01 3 ) 0 1 . 0 0 0 5 - 0 2
.
▲ A髓
随着 我国社会经济的发展 , 机动车数量急剧增加 , 城市交通面 为 : 绿一 > 黄一>红 , 绿灯的最短 时间为2 0 秒, 最长 时间为4 0 秒, 红灯 临巨大压力 , 城 市道路建设相对滞后 , 特别是街道 的十字路 口, 更是 下转第7 页 成为交通 网中通行能力的瓶颈和交通事故 的多发地 。 为了有效缓解 交通阻塞 , 确保交通安全 , 交通信号灯在所有城市都得到了广泛应 用。 传统的交通信号灯控 制系统具有很大的局限. 眭I “ , 结合计算机和 自动控 制技术 , 设计智能化 的交通信号灯指挥系统具有十分 重要 的 现实意 义。
智能化交通信号控制系统的设计与仿真

智能化交通信号控制系统的设计与仿真随着城市化进程的加快,交通拥堵问题变得越来越突出,成为城市管理面临的重大挑战。
传统的交通信号控制系统已经不能满足城市交通管理的需要,需要使用智能化交通信号控制技术来提高交通管理的效率和减少交通拥堵。
本文将介绍智能化交通信号控制系统的设计与仿真。
一、智能化交通信号控制系统的工作原理智能化交通信号控制系统是利用先进的传感器技术和计算机控制技术,根据交通情况和交通量的变化,自动调整交通信号的周期和时间,以保证交通的畅通和安全。
下面是智能化交通信号控制系统的工作原理:1.数据采集智能化交通信号控制系统通过不同类型的传感器采集交通数据。
这些传感器包括视频监控、地磁检测、红外线检测、车载传感器等。
车载传感器是一种小型化、智能化的传感器,可以实时采集车辆的位置、速度和行驶方向等信息,并将数据传输到控制中心。
2.数据处理智能化交通信号控制系统通过专门的计算机软件对采集到的数据进行处理。
该软件采用复杂的算法和模型,对交通数据进行分析和预测,从而确定交通信号的周期和时间。
3.交通信号控制智能化交通信号控制系统通过控制信号灯,对交通进行控制。
交通信号控制的主要内容包括信号灯的开关、信号灯的颜色和亮度等。
信号灯的开关是根据交通数据中的车辆数量和速度等信息来进行控制,从而确保交通的安全和流畅。
二、智能化交通信号控制系统的设计智能化交通信号控制系统的设计需要考虑到多种因素,包括交通结构、交通流量、路径选择和信号实时控制等。
下面是智能化交通信号控制系统的设计流程:1.交通流量分析和预测智能化交通信号控制系统的设计首先需要进行交通流量分析和预测,了解交通拥堵状况和交通流量的变化规律。
交通流量分析和预测可以采用多种方法,包括道路计数器、道路断面实时流量监测系统、交通探测器等。
2.交通信号控制参数确定智能化交通信号控制系统的设计需要根据交通流量的分析和预测,确定交通信号控制参数。
这些参数包括交通信号灯的周期、绿灯、黄灯和红灯时间等。
智能交通灯控制系统设计与仿真

第29卷第5期重庆交通大学学报(自然科学版)V o.l 29 No .52010年10月J OU RNAL OF CHONGQ I NG JI AOTONG UN IVERS I TY (NATU RAL SC I ENCE)O c.t 2010智能交通灯控制系统设计与仿真收稿时间:2010-02-12;修订时间:2010-05-21作者简介:何 翼(1989-),男,江苏江阴人,本科生,研究方向为通信信号处理。
E-m ai:l 421788464@qq .com 。
何 翼(武汉理工大学信息工程学院,湖北武汉430073)摘要:使用AH DL 语言,目标器件选用FPGA 器件,采用自上向下的设计方法,设计智能交通灯控制系统。
以单片机C8051为控制核心,实现东西、南北的通行时间可调,倒计时显示通行时间,急车强行通过等功能。
该系统具有设计周期短、可靠性很高、维护较方便、使用简单等诸多优点。
关 键 词:交通灯;FPGA;单片机中图分类号:TP368 文献标志码:A 文章编号:1674-0696(2010)05-0763-04Design and Emulation of I ntelligent Traffic L ight Control Syste mH E Y i(Schoo l o f Infor m ati on Eng ineer i ng ,W uhan U niversity of T echnology ,W uhan 430073,H ube,i Ch i na)Abstrac t :AHDL is used and FPGA dev ice is cho sen as targe t dev ice i n design i ng t he i n telli g ent traffi c li ght contro l syste m,i n w hich up t o down des i gni ng m ethod is applied .The contro l kernel o f the syste m is C8051;it can realize lots o f functi ons ,such as adj usti ng t he passi ng ti m e i n east w est and south no rt h d irec tion ,passing ti m e coun t do w n and e m ergency vehic l e compe lling passing .The syste m is advantag eous to have sho rt desi gn per i od ,h i gh re li ability ,easy operation and m a i ntenance ,etc .K ey word s :traffic li ght ;FPGA;m icro computer近年来,随着机动车数量的急剧增加,城市交通面临着巨大压力,城市道路建设相对滞后,特别是街道的十字路口,更是成为交通网中通行能力的瓶颈和交通事故的多发地。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[5]王晓薇,王慧.基于GA的交叉路口自适应模糊控制器设计[J].吉林大学学报:自然科学版, 2004, 22(4): 346-352
[6]王晓薇,王慧.基于GA的交叉路口自适应模糊控制器优化设计[J].公路交通科技, 2004, 21(9): 107-111
第26卷第1期
Vo.l 26 NO. 1 重庆工商大学学报(自然科学版)J ChongqingTechnolBusinessUniv. (NatSciEd) 2009年2月Feb. 2009
文章编号: 1672-058X(2009)01-0084-04
智能交通灯控制系统的设计和仿真*
[7]崔宝侠,杨继平,徐春锋.城市交通灯信号配时控制器优化的一种新策略[J].沈阳工业大学学报:自然科学版, 2007, 29
(5): 554-559
[8]唐权.基于CORBA及多层C/S模式的分布式软件控制系统[J].重庆工学院学报, 2008, 22(1): 150
(下转第92页)
87第1期王灿,等:智能交通灯控制系统的设计和仿真14-16
辆延误时间取平均值,结果见表2。
表2 各种车流量情况下的平均车辆延误时间s/辆
1 2 3 4 5 6平均值
车流量轻18. 77 18. 78 18. 72 18. 75 18. 90 18. 81 18. 79
车流量中40. 54 36. 69 34. 62 44. 51 37. 21 33. 86 37. 91
据此,对两个以上的相出现交通高峰时,采用固定交通灯周期,自动调节时长比例的方案。
两种方案区分的标准是看是否有两个以上的等待通行车辆数占满检测区。如果没有则自动执行第一种
方案,如果有则选择第二种方案。以每辆车平均占用3 m车道长度,则100 m检测区能容纳33辆车。在一
个周期开始,对上一周期中每一相绿灯前的车辆数进行判断,有两个以上方向的等待车辆数超过33,则选择
收稿日期: 2008-11-03;修回日期: 2008-12-25。
*基金项目:重庆工商大学学生科技创新基金资助项目(083010)。
作者简介:王灿(1986-),女,石家庄市辛集人,重庆工商大学2006级应用物理专业,从事系统控制研究。量检测工具。
城市中典型的交叉路口为双向6车道,如图1所示,每个方向第1、第2和第3车道分别为右转、直行和
会使其他各相车辆的等待时间延长,造成平均车辆延误时间增大,这是本方案的不足之处,但同时也是目前
文献中所提各种方案的共同缺点,对这一问题的解决或许可以通过增加相位数的方法实现,这一工作可以在
今后完成。
参考文献:
[1]徐冬玲.交通控制的Fuzzy控制及神经网络的实现[J].信息与控制, 1992, 21(2): 74-79
MATLAB编制了仿真程序,对方案进行了仿真实验,结果显示:平均车辆延误时间比传统的固定配时方案以
及采用模糊算法或改进的模糊算法方案都低;该方案不受时间和地域影响,对所有交通路口均能达到最优化
的交通灯控制。
关键词:交通灯;智能控制;平均延误时间
中图分类号:TP 273 文献标识码:A
交通灯方案的优劣以平均车辆延误时间为依据,据此,使用MATLAB软件编制了仿真程序(图2),对
图2 仿真程序流程图
86重庆工商大学学报(自然科学版)第26卷提出的方案进行了计算机仿真。设定车辆到达速率最大为0. 4辆/s,而离开路口的速率平均为1辆/s[7],在
一个交通灯周期内,各方向到达检测区的速率恒定,该速率使用随机数产生。总车辆延误时间为每辆车在相
固定周期方案。
设P1、P2、P3和P4分别是每一相两个方向等待通行车辆数的最大值,则本周期每一相的绿灯时长为:
t1=TP1P1+P2+P3+P4;t2=TP2P1+P2+P3+P4;t3=TP3P1+P2+P3+P4;t4=TP4P1+P2+P3+P4
这里,T是设定的周期,取为120 s。
3 计算机仿真
平均车辆延误时间62. 50 57. 12 52. 08 48. 67 51. 51 53. 83 53. 79 58. 52
2. 2 固定周期方案
自动绿灯时长方案能够根据需要通行的车辆数和车辆达到的情况自动调节绿灯时长,但存在一个问题,
85第1期王灿,等:智能交通灯控制系统的设计和仿真就是在几个方向同时出现交通高峰时会造成其他方向的车辆连续长时间的等待,从而增加车辆延误时间。
最大时长的设定是为了不让某方向长时间占用通行权,使其他方向的车辆的延误时间增大,对于不太大的单
交叉路口,绿灯时间一般不超过60 s,因此设定tm=60 s。
2. 1 自动绿灯时长方案
一般车辆在距路口100 m左右就会根据行驶方向自动进入相应车道,因此在此假定某时刻每车道的检
测区内的车辆数即为该通行方向等待通行的车辆数。由于远侧检测器执行加操作,即每通过一辆,车辆数加
一,而近侧检测器执行减操作,即每通过一辆,车辆数减一,因此不管交通灯处于红灯期间还是绿灯期间,检
测区都能实时提供等待通行车辆的数据。本系统的方案是在绿灯期间,当等待通行车辆数降低到某一个数
N时,即可自动关闭,下一项开始通行,这个最小车辆数称为留存数。应该注意,每一相通行车辆有两个方
向,设定的留存数N要求两个方向的车辆数都小于这个数。
通灯时长比例方式。两种方式判断的标准是是否出现两
个或更多方向的排队车辆占满计数区,即如果出现两个方
向的车辆排队长度超过100m即使用第二种控制方式,否则使用第一种方式。不管采用哪种方式,系统都要
设定一个最短绿灯时长和最大绿灯时长。设定最短绿灯时长的目的是为了保证每一条道路都不会因为车流
量过小而不给通行时间,设定原则是能让少量车辆能安全通过路口而不影响交通安全,一般取t0=15 s[7]。
流分时通过即可,在这里不予讨论,也不必埋设传感器统
计车流量。
系统采用根据传感器获得的等待放行车辆数适时控
制放行时间的自动周期自动交通灯时长比例的方法和固
定周期自动调节交通灯时长比例两种方法相结合,在各方
向车辆数比较均衡的交通低峰时段采用自动周期,在某方
向或几个方向出现交通高峰时采用固定周期自动调节交
[2]陈森发,徐吉谦,陈洪.城市主干道交通信号灯模糊线控制的探讨[J].运筹与管理, 1998, 4(1): 36-37
[3]陈森发,陈洪,徐吉谦.城市单路口交通的两级模糊控制及其仿真[J].系统仿真学报, 1998, 4(10): 35-40
[4] GAO J,LI J.Multiphase fuzzy controlunderhybrid trafic flow of single intersection[A]. IntelligentTransportation Systems 2003
[6]宋淼,唐青,许真.中国2005年狂犬病流行相关因素分析[J].中华流行病学杂志, 2006, 27(11): 956-959
4 结 论
使用MATLAB对该方案进行了计算机仿真,结果显示,车流量在轻、中、重三种情形下获得的平均车辆
延误时间均比传统的固定配时方案以及采用模糊算法或改进的模糊算法方案低,说明该方案是一种较好的
交通灯智能控制方案。而且,本方案不受地域限制,具有普遍的实用性。本方案中,绿灯时长以某一相两个
车流方向中车流量较大方向的待通行车辆数为判断依据,但在同一相不同方向车流量严重不均衡的情况下,
随着我国经济水平的高速发展,人民的消费水平不断提高,在道路上行驶的各种机动车辆不断增多,这
给城市交通带来了巨大压力。传统的单交叉口交通信号控制一般采用定时控制方案,这种方案最主要的缺
点在于,当车流量变化较大时,时常会因为放行不合理导致交通阻塞。为此,研制一套根据车流量自动控制
交通灯时长的智能交通控制系统是很有意义的。对智能交通控制已进行了多年的研究,早期主要采用模糊
2 控制模式
采用常用的四相位方式放行,在第一相位允许东西方向直行车辆通行,第二相位允许东西方向左转车辆
图1 交叉路口车流示意图
通行,第三相位南北方向直行车辆获通行权,第四相位南
北方向左转车辆通行。四个相位顺序循环切换,交通灯之
间采用短时黄进行缓冲警告。对于右转车流,由于不与其
他车流发生冲突,因此只需要与横穿马路的人流和自行车
中华人民共和国国家体育总局统计成年男性的平均体重为66. 5 kg,成年女性的平均体重为56. 8 kg,因此,
压力传感器的敏感下限为226. 8 kg。压力传感器的另一个特性指标是其承受压力的能力,在特大型正常工作。依据这两个指标选择的压力传感器可以作为本系统的车流
应车道等待时间的总和,而通行的总车辆数为每相两个方向在绿灯时经过路口的车辆数之和,平均车辆延误
时间为总延误时间与通行车辆总数之比。仿真时间为12 000 s,将车流量情况分为轻、中和重三种情形,这
三种情形车辆到达速率分别为小于0. 2辆/s、0. 3辆/s和0. 4辆/s,每种情形共进行6次仿真,获得的平均车
车流量重47. 98 48. 47 52. 38 45. 42 50. 76 46. 40 48. 57
仿真结果与文献[3]以及文献[7]比较可以看出,在此采用的方案与传统固定配时方案以及采用模糊算
法或遗传算法与模糊退火相结合的优化算法相比,车辆的平均延误时间均有较大幅度的减小,这说明该方案
是一种更佳的交通灯配时方案。
对留存数N,可以根据平均车辆延误时间进行优化。使用MATLAB编制了仿真程序,以12 000 s为一个