机械设计基础课后习题答案全
机械设计基础课后题答案

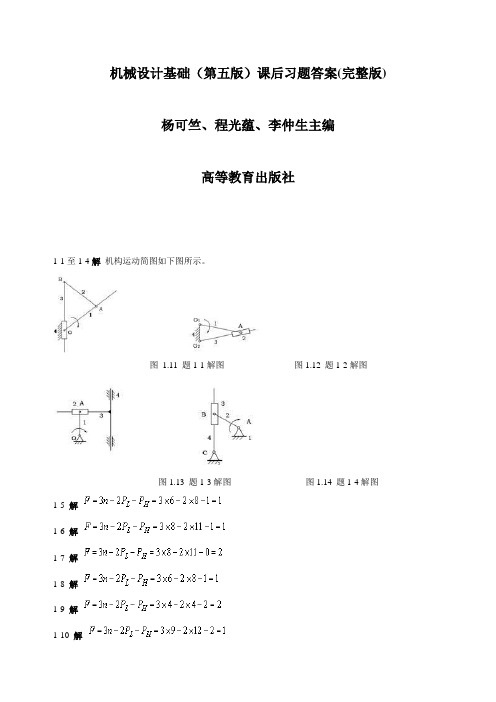
机械设计基础课后题答案1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;(2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础 课后习题答案 第三版 高等教育出版社课后答案(1-18章全)
机械设计基础课后习题答案第三版高等教育出版社课后答案(1-18章全)机械设计基础课后习题答案第三版高等教育出版社目录第 1 章机械设计概述??????????????????????????????????????????????????????????????????? ????????????????????????????????? 1第 2 章摩擦、磨损及润滑概述??????????????????????????????????????????????????????????????????? ????????????????? 3第 3 章平面机构的结构分析??????????????????????????????????????????????????????????????????? ????????????????????? 12第 4 章平面连杆机构??????????????????????????????????????????????????????????????????? ????????????????????????????????? 16第 5 章凸轮机构??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????36第 6 章间歇运动机构??????????????????????????????????????????????????????????????????? ????????????????????????????????? 46第7 章螺纹连接与螺旋传动??????????????????????????????????????????????????????????????????? ????????????????????? 48第8 章带传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????60第9 章链传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????73第10 章齿轮传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????80第11章蜗杆传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????112第12 章齿轮系??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????124第13 章机械传动设计???????????????????????????????????????????????????????????????????????????????????????????????????? 131第14 章轴和轴毂连接??????????????????????????????????????????????????????????????????? ????????????????????????????????? 133第15 章轴承??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????????138第16 章其他常用零、部件??????????????????????????????????????????????????????????????????? ????????????????????????? 152第17 章机械的平衡与调速??????????????????????????????????????????????????????????????????? ????????????????????????? 156第18 章机械设计CAD 简介??????????????????????????????????????????????????????????????????? ???????????????????????163第1章机械设计概述1.1 机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下几个阶段:1.产品规划主要工作是提出设计任务和明确设计要求。
机械设计基础(第五版)课后习题答案(完整版)
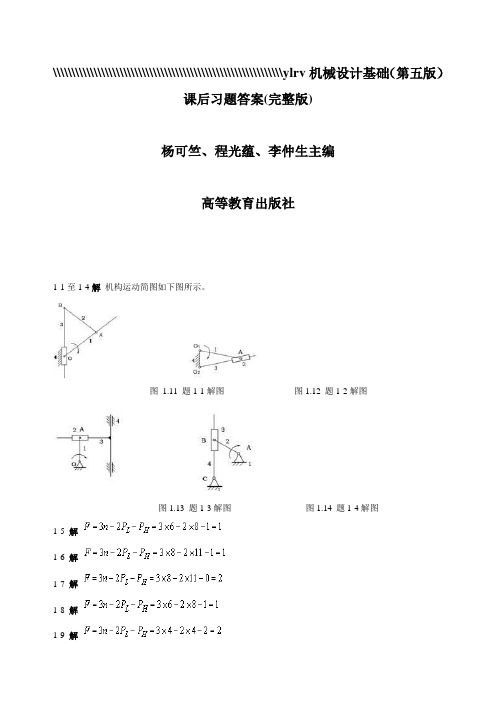
\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ylrv机械设计基础(第五版)课后习题答案(完整版)杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
《机械设计基础》课后习题答案
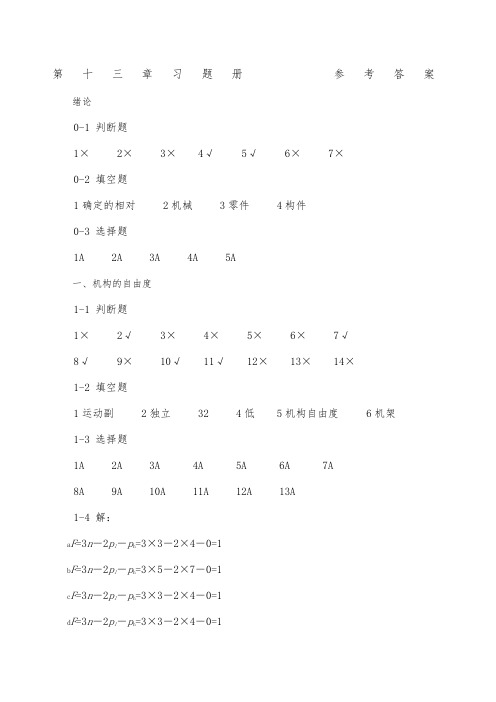
第十三章习题册参考答案绪论0-1 判断题1× 2× 3× 4√ 5√ 6× 7×0-2 填空题1确定的相对 2机械 3零件 4构件0-3 选择题1A 2A 3A 4A 5A一、机构的自由度1-1 判断题1× 2√ 3× 4× 5× 6× 7√8√ 9× 10√ 11√ 12× 13× 14×1-2 填空题1运动副 2独立 32 4低 5机构自由度 6机架1-3 选择题1A 2A 3A 4A 5A 6A 7A8A 9A 10A 11A 12A 13A1-4 解:a F=3n-2p l-p h=3×3-2×4-0=1b F=3n-2p l-p h=3×5-2×7-0=1c F=3n-2p l-p h=3×3-2×4-0=1d F=3n-2p l-p h=3×3-2×4-0=1e F=3n-2p l-p h=3×3-2×4-0=1f F=3n-2p l-p h=3×3-2×4-0=1g F=3n-2p l-p h=3×3-2×4-0=11-5 解:a F=3n-2p l-p h =3×5-2×7-0=1b滚子中心存在局部自由度,F=3n-2p l-p h=3×8-2×11-1=1c E处存在复合铰链,F=3n-2p l-p h=3×5-2×6-1=2d F=3n-2p l-p h=3×6-2×8-1=1e滚子中心存在局部自由度,两移动副处之一为虚约束,三根杆以转动副相连处存在复合铰链F=3n-2p l-p h=3×9-2×12-2=1f齿轮、杆和机架以转动副相连处存在复合铰链,F=3n-2p l-p h=3×4-2×4-2=2g F=3n-2p l-p h=3×3-2×3-0=3h滚子中心存在局部自由度,F=3n-2p l-p h=3×3-2×3-2=1i中间三根杆以转动副相连处存在复合铰链,=3n-2p l-p h=3×7-2×10-0=1 j左边部分全为虚约束,三根杆以转动副相连处存在复合铰链,F=3n-2p l-p h=3×5-2×7-0=11-6 解:a该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×4-2×5-1=1>0 b该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-1=0 c该构件组合不是机构,因为该组合自由度F=3n-2p l-p h=3×4-2×6-0=0d该构件组合为机构,因为该组合自由度F=3n-2p l-p h=3×3-2×4-0=1>0二、平面连杆机构2-1 判断题1× 2× 3√ 4× 5√ 6× 7√8√ 9√ 10× 11× 12√ 13× 14×15√ 16× 17× 18√ 19× 20√ 21×22× 23× 24× 25√2-2 填空题1低 2转动 33 4连杆,连架杆 5曲柄,摇杆6最短 7曲柄摇杆 8摇杆,连杆 92 10>11运动不确定 12非工作时间 13惯性 14大15中的摆动导杆机构有,中的转动导杆机构无 16机架 17曲柄18曲柄滑块 19双摇杆 20双曲柄机构 21无,有2-3 选择题1A 2C 3B 4A 5B 6B 7A8C 9A 10A 11A 12C 13C 14A15A 16A 17A 18A 19A 20A 21A2-4 解:a双曲柄机构,因为40+110<70+90,满足杆长条件,并以最短杆为机架b曲柄摇杆机构,因为30+130<110+120,满足杆长条件,并以最短杆的邻边为机架c双摇杆机构,因为50+100>60+70,不满足杆长条件,无论以哪杆为机架都是双摇杆机构d双摇杆机构,因为50+120=80+90,满足杆长条件,并以最短杆的对边为机架2-5 解:1由该机构各杆长度可得l AB+ l BC<l CD+ l AD,由此可知满足杆长条件,当以AB杆或AB杆的邻边为机架时该机构有曲柄存在2以l BC或l AD杆成为机架即为曲柄摇杆机构,以l AB杆成为机架即为双曲柄机构,以l CD杆成为机架即为双摇杆机构2-6 解:1曲柄摇杆机构由题意知连架杆CD杆不是最短杆,要为曲柄摇杆机构,连架杆AB杆应为最短杆0<l AB≤300 mm且应满足杆长条件l AB+l BC≤l CD+l AD,由此可得0<l AB≤150mm 2双摇杆机构由题意知机架AD杆不是最短杆的对边,要为双摇杆机构应不满足杆长条件①AB杆为最短杆0<l AB≤300mm时,l AB+l BC>l CD+l AD,由此可得150mm<l AB≤300mm②AB杆为中间杆300mm≤l AB≤500mm时,l AD+l BC>l CD+l AB,由此可得300mm≤l AB<450mm③AB杆为最长杆500mm≤l AB<1150mm时,l AB+l AD>l CD+l BC,由此可得550mm<l AB<1150mm由此可知:150mm<l AB<450 mm,550mm<l AB<1150 mm3双曲柄机构要为双曲柄机构,AD杆必须为最短杆且应满足杆长条件①AB杆为中间杆300mm≤l AB≤500mm时,l AD+l BC≤l CD+ l AB,由此可得450mm≤l AB ≤500mm②AB杆为最长杆500mm≤l AB<1150mm时,l AB+l AD≤l CD+l BC,由此可得500mm≤l AB ≤550mm由此可知:450mm≤l AB≤550mm2-7 解:a b c d e 各机构压力角和传动角如图所示,图a 、d 机构无死点位置,图b 、c 、e 机构有死点位置2-8 解:用作图法求解,主要步骤: 1计算极位夹角:︒=+-⨯︒=+-⨯︒=3615.115.118011180K K θ 2取比例尺μ=mm3根据比例尺和已知条件定出A 、D 、C 三点,如图所示4连接AC ,以AC 为边作角的另一角边线,与以D 为圆心、摇杆DC 为半径的圆弧相交于C 1和C 2点,连接DC 1和DC 2得摇杆的另一极限位置两个5从图中量得AC =71mm,AC 1=26mm,AC 2=170mm 6当摇杆的另一极限位置位于DC 1时:5mm .2221=⨯=AC AC l AB -μ,5mm .4821=+⨯=AC AC l BC μ 7当摇杆的另一极限位置位于DC 1时:5mm .4922=⨯=AC AC l AB -μ,5mm .12022=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为、和、; 2-9 解:用作图法求解,主要步骤: 1计算极位夹角:︒=+-⨯︒=+-⨯︒=4.1612.112.118011180K K θ 2取比例尺μ=mm3根据比例尺和已知条件定出滑块的两极限位置C 1、C 2两点,如图所示4连接C 1C 2,以C 1C 2为直角边作直角三角形C 1C 2P ,使∠C 1C 2P =90°-θ=° 5以C 2P 为直径作圆O6将C 1C 2偏移e 值,与圆O 交于A 点,连接AC 1和AC 2, 7从图中量得AC 1=34mm,AC 2=82mm,则:24mm 212=⨯=AC AC l AB -μ,58mm 221=+⨯=AC AC l BC μ 答:曲柄和连杆的长度分别为24mm 和58mm; 2-10 解:用作图法求解,主要步骤: 1计算极位夹角:︒=+-⨯︒=+-⨯︒=3014.114.118011180K K θ 2取比例尺μ=mm3根据比例尺和已知条件定出机架AC ,如图所示 4根据摇杆的摆角等于极为夹角作出摇杆的两极限位置 5过A 点作摇杆两极限位置的垂线,得垂足点B 1、B 2 6从图中量得AB 1=23mm,则26m m 1=⨯=AB l AB μ 答:曲柄的长度为26mm; 2-11 解:用作图法求解,主要步骤: 1计算极位夹角:︒=+-⨯︒=+-⨯︒=0111118011180K K θ 2取比例尺μ=mm3根据比例尺和已知条件定出D 、C 1、C 2三点,如图所示 4过D 点作C 1D 的垂线,并与C 1C 2的连线交于A 点 5从图中量得AD =220mm,AC 1=234mm,AC 2=180mm,则:27mm 212=⨯=AC AC l AB -μ, 207mm 212=+⨯=AC AC l BC μ,220m m =⨯=AD l AD μ答:曲柄的长度为27mm,连杆的长度为207mm,机架的长度为220mm;三、凸轮机构3-1 判断题1√ 2× 3√ 4× 5× 6× 7× 8× 9√ 10√ 11√ 12√ 13√ 14√ 15× 16√ 17√ 18√ 19× 3-2 填空题1使用 2盘形 3凸轮轮廓 4变曲率 5行程 6行程 7轮廓 8凸轮的转角,从动件的位移 9最小 10法线 11大 12等速 13小 14许用压力角 15低 16大 17大 18内凹 19抛物线 20刚性 3-3 选择题1B 2A 3A 4A 5A 6C 7A 8A 9A 10A 11A 12A 13A 14A 15A 16A 17B 18A 19A 20C 21D 22A 23B 24D 25B 26B 27C 3-4 解:1凸轮的基圆和基圆半径的标注如图所示2从动件的位移线图s-t 和升程h 的标注如图所示 3-5 解:凸轮的位移线图如图所示;3-6 解:1凸轮的位移线图如图所示2凸轮的位移线图如图所示3-7 解:所设计对心直动尖顶从动件盘形凸轮机构如图所示3-8 解:所设计偏置直动滚子从动件盘形凸轮机构如图所示3-9 解:各凸轮机构中b、c点的压力角如图所示四、间歇运动机构4-1 判断题1√ 2√ 3× 4√ 5√ 6× 7× 8×4-2 填空题1周期性 2棘轮 3内 42 5锯4-3 选择题1A 2A 3A 4A 5A 6A 7A8A 9A 10A 11A五、联接5-1 判断题1× 2√ 3√ 4× 5√ 6√ 7×8× 9× 10× 11× 12√ 13× 14×15× 16× 17√ 18× 19× 20√ 5-2 填空题1牙型 2大 3越高 4自锁性 54 6螺钉 7拧紧力矩 8防松 9一致 10摩擦 11直线 12梯形 13传力,传导,调整 14右 15轴和毂,挤压 16轴的直径,轴头 17A,B,C,C 18增加键的长度 19B 2080 5-3 选择题1B 2A 3A 4C 5D 6C 7B 8A 9A 10D 11B 12A 13B 14B 15C 16A 17B 18A 19A 20B 21A 22B 23A 24B 25C 26B 27D 28B 29C 30A 31A 32A 33A 34D 35A 36A 37A 38A 39A 40A 41A 42B 43A 44D 45A 5-4 解:该螺栓连接为松螺栓连接,其强度条件为:[]214Fσσπd =≤ 拉杆材料为Q235,其235MPa s σ=,取安全系数S =,则:[]235138.24MPa 1.7s σσS=== 则:114.56mm d ≥== 查教材表5-2可知,选小径d 1=,公称直径d =20mm 的粗牙普通螺纹; 答:拉杆螺纹的直径为M20;5-5 解:该螺栓连接为受横向工作载荷的紧螺栓连接,其强度条件为:[]215.2a e F σσπd =≤ 0Ra CF F F zmf=≥,查教材表5-2可知,M16的螺栓的小径d 1=;取C =,则: 答:该螺栓组能承受的横向载荷应不大于; 5-6 解:该螺栓连接为受轴向工作载荷的紧螺栓连接,其强度条件为:[]215.2a e F σσπd =≤ 各螺栓所受轴向工作载荷220005500N 4Q E F F n=== 各螺栓所受残余预紧力F R =,各螺栓所受总轴向拉力F a =F E +F R = F E =×5500=8800N拉杆材料为Q235,其235MPa s σ=,取安全系数S =,则:[]235156.67MPa 1.5s σσS===则:19.64mm d查教材表5-2可知,选小径d 1=,公称直径d =12mm 的粗牙普通螺纹; 答:所求螺栓直径为M12; 5-7 解:该螺栓连接为受横向工作载荷的紧螺栓连接,其强度条件为:[]215.2ae F σσπd =≤ 材料为35钢,其315MPa s σ=,取安全系数S =,则:[]315210MPa 1.5s σσS===查教材表5-2可知,M16的螺栓的小径d 1=;则:0Ra CF F F zmf=≥,[]221420.15 3.1413.83521024.27kN 5.2 5.2 1.2R zmf πd σF C ⨯⨯⨯⨯⨯≤==⨯答:允许承受的最大载荷不大于;5-8解:1确定螺杆的直径该螺栓连接为受轴向工作载荷的紧螺栓连接,其强度条件为:[]215.2a e F σσπd =≤ F a =W =20kN材料为45钢,其355MPa s σ=,该连接不需严格控制预紧力,取安全系数S =4,则:查教材表5-2可知,选小径d 1=,公称直径d =24mm 的粗牙普通螺纹; 2确定扳手手柄的最小长度查教材表5-2可知公称直径d =24mm 粗牙普通螺纹中径d 2=,则:122.05120221102.55mm 200ad F L F ⨯≥==,取L =1103mm 答:1螺杆直径为M24;2扳手手柄的最小长度为1103mm; 5-9解:1校核螺栓的剪切和挤压强度该螺栓连接为受横向工作载荷的铰制孔螺栓连接:剪切强度条件为:[]204F ττm πd =≤;挤压强度条件为:[]p 0p σδσ≤=d F查教材表5-3可知:级的螺栓的σbp =800Mpa ;σs =640Mpa ;查教材表5-4可知:s τ=,s p =则:[]640256MPa 2.5sτστS ===;bp p p800320MPa 2.5σσS ⎡⎤===⎣⎦ 2204424237.72MPa 256MPa /41 3.1412F τm πd ⨯===<⨯⨯;p 02423 5.27MPa<320MPa 2023F σd δ===⨯ 答:所用螺栓满足剪切和挤压强度要求 2平键的选择及强度校核选A 型平键,根据轴径和轴头长度,从设计手册中查得键的尺寸b =16mm,h = 10mm,L = 70mm;键的标记为:键 16×70 GB/T 1096 —2003;答:所选择的键不满足强度要求; 5-10解:该螺栓连接为受横向工作载荷的普通螺栓连接,其强度条件为:[]215.2a e F σσπd =≤ 级的螺栓的640MPa s σ=,取安全系数S =,则:[]640426.67MPa 1.5s σσS===取C =,则:31.263012.115kN 660.166510a CT F fr -⨯≥==⨯⨯⨯则: 查教材表5-2可知,可选小径d 1=,公称直径d =10mm 的粗牙普通螺纹; 答:螺栓直径为M10; 5-11解:该螺栓连接为受横向工作载荷的紧螺栓连接,其强度条件为:[]215.2ae F σσπd =≤ 受力分析如图所示将外载荷P 向螺栓组中心简化得螺栓组所受的转矩T 和横向载荷P 横向载荷P = 10000N ;转矩T =⨯ = 3000000 N ·mm,方向如图所示由于横向载荷作用每个螺栓受到的横向力1234100002500N 44P P P P P F F F F ======由于转矩作用每个螺栓受到的横向力12347071N 4T T T T T F F F F r ======由图可知,螺栓1、2所受的横向力相等,螺栓3、4所受的横向力相等,且螺栓1、2所受的横向力最大,其值为m =1,取C =,则:1 1.29013.867603.5N 10.16a CF F mf ⨯≥==⨯ 查设计手册可知,可选小径d 1=,公称直径d =36mm 的粗牙普通螺纹;答:该螺栓组螺栓的小径须大于,可选M36的螺栓;5-12 解:略 5-13解:1确定螺柱直径该螺栓连接为受轴向工作载荷的紧螺栓连接,其强度条件为:[]215.2a e F σσπd =≤ 每个螺栓平均承受的轴向工作载荷:223.1431607536N 448E πpDF z ⨯⨯===⨯ 取残余预紧力F R =,则各螺栓所受总轴向拉力F a =F E +F R = F E =×7536=级螺栓的400MPa s σ=,按控制预紧力取安全系数S =,则:[]400266.67MPa 1.5sσσS === 则:111.03mm d ≥查教材表5-2可知,可选小径d 1=,公称直径d =16mm 的粗牙普通螺纹; 2确定螺柱分布直径取螺柱间距为5d ,则055816203.82mm 3.14zd D π⨯⨯===,取D 0=200mm答:连接螺栓直径可选M16的粗牙普通螺纹,分布直径为200mm; 5-14解:1平键类型和尺寸选择安装齿轮处的键:选A 型平键,根据轴径和轴头长度,从设计手册中查得键的尺寸b = 25mm,h = 14mm,L =80mm;键的标记为:键 25×80 GB/T 1096 —2003;安装联轴器处的键:选A 型平键,根据轴径和轴头长度,从设计手册中查得键的尺寸b = 20mm,h = 12mm,L =100mm;键的标记为:键 20×100 GB/T 1096 —2003;2平键连接强度的校核安装齿轮处平键强度校核:()()p 4480046.18MPa 100~120MPa 90148025T σdhl⨯===<⨯⨯-安装联轴器处平键强度校核:()()p 4480047.62MPa 50~60MPa 701210020T σdhl⨯===<⨯⨯-所选择的平键满足强度要求 答:所选择的平键满足强度要求5-15解:1平键类型和尺寸选择选A型平键,根据轴径和轴头长度,从设计手册中查得键的尺寸b = 22mm,h = 14mm,L =100mm;此键的标记为:键 22×100 GB/T 1096 —2003;2传递的最大扭矩查教材表5-7得σp =100 ~ 120Mpa,取σp =120Mpa答:能传递的最大扭矩不大于·m;5-16解:1平键类型和尺寸选择选A型平键,根据轴径和轴头长度,从设计手册中查得键的尺寸b= 25mm,h= 14mm,L = 90mm;此键的标记为:键 25×90 GB/T 1096 —2003;2平键连接强度的校核所选择的平键满足强度要求答:所选择的平键为键 25×90 GB/T 1096 —2003;经验算该键满足强度要求;六、带传动和链传动6-1 判断题1× 2× 3√ 4√ 5× 6× 7×8√ 9× 10× 11√ 12× 13√ 14√15× 16× 17× 18× 19× 20× 21√22× 23× 24√ 25×6-2 填空题1中心角,120° 2两侧,40° 3梯形,7,Y4初拉力,摩擦系数,小轮包角 5越大 65~25 7小8带的基准长度 9平行,对称平面应在同一平面 10小11传动比 12张紧轮 13摩擦力 14可以15弹性滑动,打滑 16打滑 1710 18外19主 20小 214 22型号 23主24绳芯 25平均,瞬时 26链轮的多边效应27不能保持恒定的瞬时传动比;传动平稳性差;工作时有噪音等28偶,奇 29疲劳破坏,胶合 30外链板与销轴31制造精度的影响,致使各排链的载荷分布不均32大,跳齿 33少,冲击,动载荷6-3 选择题1C 2B 3B 4A 5A 6A 7C8A 9B 10B 11A 12A 13C 14A15C 16A 17A 18C 19A 20D 21D22A 23A 24B 25A 26A 27A 28A29D 30B 31B 32A 33B 34A 35B36A 37B 38C6-4解:1小轮包角2带的几何长度查教材表6-3可知,选带的基准长度L d=2800mm3不考虑带传动的弹性滑动时大带轮转速1221d d n d i n d ==,11221460150547.5r /min 400d d n d n d ⨯===4滑动率ε=时大带轮的实际转速()12211d d n d i n d ε==-,()()11221146015010.015539.3r /min 400d d n d εn d -⨯⨯-=== 答:1小轮包角为°;2带的几何长度为,应选带的基准长度2800mm ;3不考虑带传动的弹性滑动时大带轮转速min ;4大带轮的实际转速min;6-5解:1确定带的基准长度L d查教材表6-3可知,选带的基准长度L d =1600mm 2确定实际中心距a 取实际中心距a =530mm 3计算所需带的根数z查教材表6-5得P 0=;查教材表6-6得ΔP 0=;查教材表6-7得K α=;查教材表6-3,K L =,则:取z =3根答:1带的基准长度L d =1600mm ;2实际中心距a =530mm ;3所需带的根数为3根;6-6解:查教材表6-3可知,选带的基准长度L d =1600mm 取实际中心距a =460mm查教材表6-5得P 0=;查教材表6-6得ΔP 0=;查教材表6-7得K α=;查教材表6-3,K L =,查教材表6-8取工作情况系数K A =答:能传递的最大功率为; 6-7解: 1选择V 带型号查教材表6-8取工作情况系数K A =,故:c 1.17.58.25kW A P K P =⨯=⨯= 根据P c 和n 1,由图6-12选用A 型普通V带; 2确定大小带轮基准直径由1选择知小带轮基准直径d d1的取值范围为112~140mm,又由教材表6-5知此范围内d d1只有112mm 、125mm 、140mm 三种取值,现选取d d1=125mm;则:根据教材表6-2选从动轮基准直径d d2=280mm; 3验算带速带速在5~25m/s 范围内,带速合适; 4求V 带的基准长度和中心距初定中心距的取值范围0283.5810a ≤≤,现取初定中心距a 0=500mm 带的初定长度:查教材表6-3可知,选带的基准长度L d =1600mm 带传动的中心距:d d0016001648500476mm 22L L a a --≈+=+=取实际中心距a =476mm中心距变动范围为452~500mm 5验算小轮包角α1=°>120°,合适;6确定带的根数查教材表6-5得P 0=;查教材表6-6得ΔP 0=;查教材表6-7得K α=;查教材表6-3,K L =,则:取z =5根7计算单根V带的预紧力 查教材表6-1得q =m,则: 8计算带轮轴上的压力 9带轮结构设计略 6-8解: 1求链节数由教材表6-9查得链节距p=取链节数L p=1322求链所能传动的最大功率由教材图6-25查得P0=10kW,查表6-11得K A=,查表6-12得K Z=,单排链取K m=1,则:答:1链节数L p=132;2链所能传动的最大功率P=10kW;6-9解:由教材表6-9查得链节距为p=的链号为12A由n1=min、链号12A查教材图6-25可得P0=20kW6-10解:由教材表6-9查得满足极限载荷Q = 50kN的链号为16A,链节距为p=由教材图6-25查得P0=40kW,查表6-12得K Z=,单排链取K m=1,则:答:链能传递的功率为;6-11解:1选择链号由传动比i= 3查教材表6-10 取z1=25,则z2=i z1=3×25=75查表6-11取K A=,查表6-12取K z=,单排链取K m=1,由式6-22b得根据P0=和n l=720r/min查教材图6-25可选链号10A2确定润滑方式由表6-9查得链节距p=答:由链号10A,v=s,查图6-26,可选择油浴或飞溅润滑;6-12解:1两轮的合理转向如图所示2两轮的包角如图所示3V带与带轮接触处的弯曲应力分布如图所示,σb1>σb24载荷过大时,打滑首先出现在小带轮处;由于小带轮上的包角小于大带轮上的包角,因此小带轮上的总摩擦力相应地小于大带轮上的总摩擦力,故打滑首先出现在小带轮处5d11 3.1410014607.64m/s 601000601000πd n v ⨯⨯===⨯⨯,带速在5~25m/s 范围内,带速合适6-13解:图a 、b 、c 所示的链传动布置中链轮均按逆时针旋转七、齿轮传动7-1 判断题1√ 2× 3× 4√ 5× 6× 7× 8√ 9× 10√ 11√ 12√ 13√ 14√ 15× 16× 17× 18√ 19× 20× 21× 22× 23× 24× 25× 26× 27√ 28× 29× 30√ 31× 32√ 33× 34× 35× 7-2 填空题1基圆,基圆 220° 3等于,大于 4恒定,不变 5两轮的模数相等、压力角相等 6≥1,实际啮合线段/基圆齿距 7轴向力,8°~25° 8两轮的模数相等、压力角相等、螺旋角大小相等方向相反9右,14°30′,3mm 10相切,相割,相离11正,弯曲 1217 13少,小 14≤350HBS,齿面点蚀 15轮齿折断 16高20~50HBS,5~10mm 17齿面磨损 18硬度 19相反,相同 20相同,不同 21多 22 2320~40 24少,大,弯曲 25浸油 2610 27直径大小 28500 29铸造30同时参加啮合的齿对数 7-3 选择题1B 2C 3A 4C 5B 6B 7C 8B 9C 10D 11D 12D 13A 14D 15B 16D 17A 18C 19A 20C 21A 7-4解:1啮合线N 1N 2如图所示;2节点P 如图所示;3两轮的节圆如图所示 7-5解:分度圆直径:11 2.52050mm d mz ==⨯=,22 2.540100mm d mz ==⨯= 齿顶圆直径:a11a (2)(2021) 2.555mm d z h m *=+=+⨯⨯=齿根圆直径:f 11a (22)(202120.25) 2.543.75mm d z h c m **=--=-⨯-⨯⨯= 基圆直径:b11cos 50cos 2046.985mm d d α==⨯= 标准中心距:125010075mm 22d d a ++=== 答:两轮的分度圆直径分别为50mm 、100mm,两轮的齿顶圆直径分别为55mm 、105mm,两轮的齿根圆直径分别为、,两轮的基圆直径分别为、,标准中心距为75mm;7-6解: 模数:12221204mm 2040a m z z ⨯===++ 分度圆直径:1142080mm d mz ==⨯=,22440160mm d mz ==⨯= 齿顶圆直径:a11a (2)(2021)488mm d z h m *=+=+⨯⨯=齿根圆直径:f 11a (22)(202120.25)470mm d z h c m **=--=-⨯-⨯⨯=答:两轮的模数为4mm,两轮的分度圆直径分别为80mm 、160mm,两轮的齿顶圆直径分别为88mm 、168mm,两轮的齿根圆直径分别为70mm 、150mm;7-7解:1验算齿面接触疲劳强度查表7-6取载荷系数K =,查表7-7取弹性系数Z E =22175325z u z ===,275mm b b ==,1132575mm d mz ==⨯= []Hlim H H S σσ=,查表7-4取Hlim1580MPa σ=、Hlim2300MPa σ=,Hlim Hlim2300MPa σσ== 查表7-8取H 1.1S =,[]Hlim H H300272.73MPa 1.1S σσ===满足齿面接触强度要求; 2验算齿根弯曲强度查图7-26得Y Fa1=、Y Fa2=,查图7-27得Y Sa1=、Y Sa2=[]FFE F S σσ=,查表7-4取FE1450MPa σ=、FE2230MPa σ=,查表7-8取F 1.25S =[]FE1F1F450360MPa 1.25S σσ===,[]FE2F2F 230184MPa 1.25S σσ=== 满足齿根弯曲强度要求;答:齿面接触强度和齿根弯曲强度均满足 7-8解:开式齿轮传动主要失效形式是齿面磨损和齿根折断, 由[]1Fa SaF F 212KTY Y bm z σσ=≤得齿轮所能传递的最大转矩21F 1max Fa Sa[]2bm z T K Y Y σ=⋅查表7-6取载荷系数K =,b =b 2=40mm查图7-26得Y Fa1=、Y Fa2=,查图7-27得Y Sa1=、Y Sa2=考虑磨损对齿厚的影响[]FE F F0.7S σσ=⨯,查表7-4取FE1FE2120MPa σσ==,查表7-8取F 1.3S =F1Fa1Sa 2[]64.6214.232.91 1.56Y Y σ==⨯,F2Fa2Sa2[]64.6216.362.27 1.74Y Y σ==⨯,F F1F2Fa Sa Fa1Sa1Fa2Sa2[][][]min ,14.23Y Y Y Y Y Y σσσ⎧⎫==⎨⎬⎩⎭齿轮传动传递的最大功率1max 1max 66118583.33500.62kW 9.55109.5510T n P ⋅⨯===⨯⨯ 答:该齿轮传动所能传递的最大功率为; 7-9解:1选择材料、确定许用应力1由表7-4选小齿轮材料用38SiMnMo 调质,硬度为260HBS,σHlim1=720MPa,σFE1=590MPa,大齿轮材料为40Cr 调质,硬度为230HBS,σHlim2=700MPa,σFE2=580MPa;属软齿面传动,二者的硬度差为30HBS;2由表7-8取S H =,S F =,许用应力[]Hlim1H1H720654.55MPa 1.1S σσ===,[]H2700636.36MPa 1.1σ== []FE1F1F590472MPa 1.25S σσ===,[]F2580464MPa 1.25σ== 2按齿面接触强度设计 1设齿轮的精度等级为8级2齿轮齿数取z 1=25,z 2=iz 1=×25=80,实际传动比80 3.225i ==3小齿轮传递的转矩 4计算小齿轮分度圆直径由表7-6取载荷系数K =,由表7-9取齿宽系数d 1φ=,由表7-7取弹性系数Z E =2,则:5模数1153.24 2.13mm 25d m z ===,由表7-1取标准值m = 齿轮分度圆直径:11 2.52562.5mm d mz ==⨯=,22 2.580200mm d mz ==⨯=6齿宽d 1162.562.5mm b d φ==⨯=,取b 2=63mm,b 1=68mm7中心距3验算轮齿的弯曲强度由图7-26得齿形系数Y Fa1=,Y Fa2=,由图7-27得应力修正系数Y Sa1=,Y Sa2= 故所设计齿轮是安全的; 4齿轮的圆周速度查表7-5可知齿轮选用8级精度是合适的; 其他计算从略; 7-10解:1选择材料、确定许用应力1由表7-4大、小齿轮材料均选用40Cr 调质后表面淬火,小齿轮齿面硬度为52HRC,σFE1=720MPa,大齿轮齿面硬度为50HRC,σFE2=700MPa;属硬齿面传动;2由表7-8取S F =,考虑磨损对齿厚的影响,许用应力[]FE F F0.7S σσ=⨯[]FE1F1F7200.70.7403.2MPa 1.25S σσ=⨯=⨯=,[]F27000.7392MPa 1.25σ=⨯= 2按齿轮弯曲强度设计1齿轮齿数取z 1=17,z 2=iz 1=×17=,取z 2=73,实际传动比73 4.2917i ==2小齿轮传递的转矩 3计算齿轮模数由表7-6取载荷系数K =,由表7-9取齿宽系数d 0.6φ=由图7-26得齿形系数Y Fa1=,Y Fa2=,由图7-27得应力修正系数Y Sa1=,Y Sa2=Fa1Sa1F1 3.07 1.530.0116[]403.2Y Y σ⨯==,Fa2Sa2F2 2.26 1.750.0101[]392Y Y σ⨯== 由表7-1取m =3mm 4齿宽d 10.631730.6mm b d φ==⨯⨯=,取b 2=32mm,b 1=37mm其他计算从略; 7-11解: 螺旋角:n 12()4(2150)arccos arccos 184********m z z a β+⨯+'''===⨯ 分度圆直径:n 1142188.73mm cos cos184748m z d β⨯==='''齿顶圆直径:a11n 288.732496.73mm d d m =+=+⨯= 齿根圆直径:f11n 2.588.73 2.5478.73mm d d m =-=-⨯=答:螺旋角为847418'''︒,分度圆直径分别为、,齿顶圆直径分别为、,齿根圆直径分别为、;7-12解:小齿轮传递的转矩:6611109.55109.551079583.33N mm 1200P T n =⨯⨯=⨯⨯=⋅ 小齿轮分度圆直径:n 1132886.96mm cos cos15m z d β⨯=== 圆周力:1t1t 212279583.331830.34N 86.96T F F d ⨯==== 径向力:t1n r1r2tan 1830.34tan 20689.69N cos cos15F F F αβ⨯==== 轴向力:a1a 2t1tan 1830.34tan15490.44N F F F β===⨯= 答:作用在两个齿轮上的圆周力为,径向力为,轴向力为;7-13解:1选择材料、确定许用应力1由表7-4选大、小齿轮材料均用40Cr,并经调质后表面淬火,齿面硬度为50~55HRC,σHlim1=σHlim2=1200MPa,σFE1=σFE2=720MPa,属硬齿面传动;2由表7-8取S H =1,S F =,许用应力[][]Hlim1H1H2H12001200MPa 1S σσσ====,[][]FE1F1F2F 720576MPa 1.25S σσσ==== 2按齿根弯曲强度设计 1设齿轮的精度等级为8级2齿轮齿数取z 1=17,z 2=iz 1=×17=,取z 2=61,实际传动比61 3.5917i ==3小齿轮传递的转矩 4初选螺旋角β=15o 5计算法向模数由表7-6取载荷系数K =,由表7-9取齿宽系数d 0.5φ= 当量齿数:1v1331718.86cos cos 15z z β===,v236167.69cos 15z == 由图7-26得齿形系数Y Fa1=,Y Fa2=,由图7-27得应力修正系数Y Sa1=,Y Sa2=[]Fa1Sa1F1 2.97 1.550.0080576Y Y σ⨯==,[]Fa2Sa2F2 2.29 1.730.0069576Y Y σ⨯== 由表7-1取标准值m n = 6中心距n 12() 2.5(1761)100.94mm 2cos 2cos15m z z a β+⨯+===⨯,取实际中心距a =101mm7修正螺旋角 8齿轮分度圆直径n 11 2.51744.03mm cos cos15739m z d β⨯===''',n 22 2.561157.97mm cos cos15739m z d β⨯==='''9齿宽d 10.544.0322.02mm b d φ==⨯=,取b 2=25mm,b 1=30mm3验算齿面接触强度由表7-7取弹性系数Z E =2 所设计齿轮是安全的; 4齿轮的圆周速度查表7-5可知齿轮选用8级精度是合适的; 其他计算从略; 7-14解:分度圆锥角:11219arctanarctan 26335438z z δ'''===, 分度圆直径:1151995mm d mz ==⨯=,22538190mm d mz ==⨯= 齿顶圆直径:a1112cos 9525cos 263354103.94mm d d m δ'''=+=+⨯⨯= 齿根圆直径:f1112.4cos 95 2.45cos 26335484.27mm d d mδ'''=-=-⨯⨯=锥距:1106.21mm 2R === 齿顶角和齿根角:a f 1.2 1.25arctan arctan 31359106.21m R θθ⨯'''====顶锥角:a11a 26335431359294753δδθ'''''''''=+=+= 根锥角:f 11f 26335431359231955δδθ'''''''''=-=-=答:分度圆锥角分别为453326'''︒、66263'''︒,分度圆直径分别为95mm 、190mm,齿顶圆直径分别为、,齿根圆直径分别为、,锥距为,齿顶角和齿根角为95313'''︒,顶锥角分别为357429'''︒、50466'''︒,根锥角为559123'''︒;7-15解:小锥齿轮传递的转矩:661139.55109.551029843.75N mm 960P T n =⨯⨯=⨯⨯=⋅ 小锥齿轮分度圆直径:11425100mm d mz ==⨯= 小锥齿轮分度圆锥角:11225arctan arctan 22371160z z δ'''=== 小锥齿轮齿宽中点的分度圆直径:m111sin 10050sin 22371180.77mm d d b δ'''=-=-=圆周力:N d T F F m t t 98.78377.8075.29843221121=⨯=== 径向力、轴向力:N F F F t a r 28.248117322cos 20tan 98.738cos tan 1121='''︒⨯︒⨯===δα 答:作用在两个齿轮上的圆周力为,齿轮1的径向力和齿轮2的轴向力为,齿轮1的轴向力和齿轮2的径向力为;7-16解:1两图在K 点的圆周力和轴向力的方向如图所示 2两图各轮的转向如图所示 3斜齿轮的旋向如图所示 7-17解:1齿轮2的轮齿旋向及转动方向如图所示 2两轮在啮合点处各力的方向如图所示 7-18解:1从动轮2的转动方向如图所示 2各轮在啮合点处各力的方向如图所示 7-19解:1其它各轴的转向如图所示2齿轮2、3、4的轮齿旋向如图所示3各轮齿在啮合处的三个分力方向如图所示7-20解:1斜齿轮3和斜齿轮4的轮齿旋向如图所示2圆锥齿轮2和斜齿轮3所受各力的方向如图所示八、蜗杆传动8-1 判断题1× 2√ 3× 4× 5× 6× 7√ 8×9× 10√ 11× 12× 13√ 14× 15√8-2 填空题1斜,齿轮 2低,好,1、2、4、6 3越大 4低5合金钢,渗碳淬火,锡青铜 6m a1=m t2=m,αa1=αt2=α ,γ=β旋向相同7斜齿轮齿条的啮合 8mq 9直径系数 10蜗轮11浸油,压力喷油8-3 选择题1C 2A 3A 4A 5A 6A 7A8A 9A 10A 11A 12D 13B 14A15A 16A 17A 18B8-4解:1各图未注明的蜗杆或蜗轮的转动方向如图所示2a图蜗轮左旋,b图蜗杆左旋,c图蜗轮右旋,d图蜗轮右旋3各图蜗杆和蜗轮在啮合点处的各分力方向如图所示a bc d8-5解:1各轮的转动方向如图所示2斜齿圆柱齿轮3、4和蜗轮2、6的轮齿螺旋线方向如图所示 8-6解:25.1345312===z z i ,()()m m 5.157531055.05.02=+⨯⨯=+=z q m a 答:传动比为,标准中心距为; 8-7解:11轮为左旋,2轮为右旋,4轮为顺时针转动 22轮各分力的方向如图所示 3根据中心距相等2cos 2)(4321d d z z m a n +=+=β,解得9105120'''=β根据γtan 33mz d =,解得6381110'''=γ 34341213434ηηi i T i T T == 解得m N 03.4394⋅=T答:斜齿轮螺旋角为12°50′19″,蜗杆导程角11°18′36″,作用在蜗轮上转矩为·m8-8解:1蜗杆旋向如图所示,蜗轮右旋 2蜗轮啮合点处各力的方向如图所示3轴向力和圆周力方向反向,径向力方向不变 4m m 64881=⨯==mq d ,m m 48060822=⨯==mz d ,mm 272248064221=+=+=d d a 答:蜗杆的分度圆直径为64mm,蜗轮的分度圆直径为480mm,传动的中心距为272mm;九、轮系9-1 判断题1× 2√ 3× 4× 5× 6× 7√ 8√ 9√ 10× 9-2 填空题1固定 2周转 3首轮,末 4行星,差动 5行星,差动 6定轴,差动,行星 7行星轮,中心轮 8行星架 9-n H ,转化轮系 10大,简单 9-3 选择题1A 2B 3B 4C 5A 6B 9-4解:1根据213d r r +=和齿轮1、2、3模数相同得:60202202213=⨯+=+=z z z 2该轮系为定轴轮系,其传动比为: 3min r/45.1773.51001515===i n n 4各轮转向如图所示答:齿轮3的齿数为60,轮系的传动比为,n 5大小为min,各轮的转向如图所示; 9-5解:1该轮系为定轴轮系,其传动比为:2各轮转向如图所示答:n 4的大小为min,各轮的转向如图所示; 9-6解:1该轮系为定轴轮系,其传动比为: 2各轮转向如图所示答:n 8的大小为40r/min,各轮的转向如图所示; 9-7解:1该轮系为周转轮系,其传动比为: 25.128010003113--===n n i 答:n 3=-80 r/min ,i 13=-; 9-8解:1根据2231r r r r ++='和各轮模数相等得:202025652213==='----z z z z 2该轮系为周转轮系,其传动比为:n H 的转向与n 1相同答:齿轮3的齿数为20,n H 的大小为min,n H 的转向与n 1相同; 9-9解:该轮系为周转轮系,其传动比为:n H 的转向与n 1相反答:行星架H 的转速的大小为min,n H 的转向与n 1相反; 9-10解:1该轮系为周转轮系,其自由度F =3n ―2p l ―p h =3×4―2×4―3=1,该轮系为行星轮系2该轮系为周转轮系,其传动比为:208013213231H 13-----====z z z z z z n n n n i H H ,03=n =H i 1 5n 1与n H 转向相同答:图示轮系为行星轮系,轮系的传动比为5,n 1与n H 转向相同;十、轴承10-1 判断题1× 2√ 3× 4√ 5× 6√ 7× 8√ 9√ 10× 11√ 12√ 13× 14× 15√ 10-2 填空题1滑动,滚动 2承受轴向载荷,轴向承载,越大3外圈,内圈,滚动体,保持架 4阻力小,冲击 5向心,推力 660 7深沟球轴承,6312 8轴向承载 9点蚀,磨损,塑性变形 10接触式,非接触式 11外圈,承载 12液体摩擦,非液体摩擦 13向心,推力 14散热,减小接触应力,吸振,防锈 15内表面 16间歇,低,轻 17滑动18形成楔形油楔,相对运动,有一定粘度的润滑油 19低,高 20磨损,胶合10-3 选择题1D 2A 3A 4D 5C 6B 7B 8A 9C 10B 11A 12A 13A 14A 15B 16C 17A 18A 19A 20A 21A22D 23C 24A 25A 26C 27A 28A 29B 30A 10-4解: 1初选轴承型号由于轴径已确定,所以采用验算的方法确定轴承的型号;初选6207轴承,查教材附表3得6207轴承的C =25500N,C 0r =15200N2求当量动载荷F a /C or = 720/15200= ,根据F a /C or 值由教材表10-7线性插值求e 值0.220.260.220.0470.0280.0560.028e --=--,0.247e = F a /F r =720/1770=>e ,由教材表10-7查得X =,根据F a /C or 值由教材表10-7线性插值求Y 值1.99 1.71 1.990.0470.0280.0560.028Y --=--, 1.8Y = P =XF r +YF a =×1770+×720=3求轴承寿命查教材表10-8取f t =1,表10-9取f p = 所选轴承6207不合适改选6307轴承按照上述步骤重新计算,此处不再详细计算,只给出计算结果如下:C =33200N,C 0r =19200N,F a /C or = ,e =,F a /F r =>e ,X =,Y =,P =,L h =12089h>6000h答:所选轴承6307合适 10-5解:P =F r =1500N,查教材表10-8取f t =1,表10-9取f p =,查教材附表3得6309轴承的C =52800N答:该轴承满足使用寿命要求 10-6解: 1选择轴承根据轴承类型为角接触球轴承和轴颈70mm 从表中选择7214C 轴承 2计算轴承寿命P =40600N,查教材表10-8取f t =1,表10-9取f p =,从表中查得7214C 轴承的C =69200N3判断轴承的压紧和放松当A +S 2<S 1时,轴承1被压紧,轴承2被放松答:1选择7214C 轴承;2轴承寿命为13340h ;3当A +S 2<S 1时,轴承1被压紧,轴承2被放松;10-7解:1求轴承所受的径向力80802800933.3N 240240r rC F F ⨯===,2800933.31866.7N rD r rC F F F =-=-= 2确定轴承内部附加轴向力的方向:S C 向左,S D 向右 3求轴承的内部附加轴向力S C ==×=,S D ==×=4求轴承的轴向力A +S D =750+=>>S C ,所以轴承C 被压紧,轴承D 被放松 F aC = A +S D =,F aD = S D =答:F aC =,F aD =10-8解:1确定轴承内部附加轴向力S的方向:S1向左,S2向右2求轴承的内部附加轴向力S1==×1400=952N,S2==×900=612N3求轴承的轴向力A+S2=800+612=1412N>952N>S1,所以轴承1被压紧,轴承2被放松F a1= A+S2=800+612=1412N,F a2= S2=612N4求轴承的当量动载荷查教材表10-7知7210AC轴承的e=F a1/ F r1=1412/1400=>= e,查教材表10-7取X1=,Y1=F a2/ F r2=612/900== e,查教材表10-7取X2=1,Y2=0P1=X1F r1+Y1F a1=×1400+×1412=P2=X2F r2+Y2F a2=1×900+0×612=900NP=max{P1,P2}=5求轴承寿命查教材表10-8取f t=1,查教材附表4得7210AC轴承的C=40800N, 答:该轴承的寿命为;10-9解:1确定轴承内部附加轴向力S的方向:S1向右,S2向左2求轴承的内部附加轴向力查设计手册得30212轴承的e=,Y=S1=F r1 /2Y=4800/3=1600N,S2=F r2 /2Y=2200/3=,3求轴承的轴向力A+S1=650+1600=2250N>>S2,所以轴承2被压紧,轴承1被放松F a1=S1=1600N,F a2= A+S1=2250N4求轴承的当量动载荷F a1/ F r1=1600/4800=<= e,查教材表10-7取X1=1,Y1=0F a2/ F r2=2250/2200=>= e,查教材表10-7取X2=,Y2=P1=X1F r1+Y1F a1=1×4800+0×1600=4800NP2=X2F r2+Y2F a2=×2200+×2250=4255NP=max{P1,P2}=4800N5求轴承寿命查教材表10-8取f t=1,10-9取f p=,查教材附表5得30212轴承的C=102000N, 答:该对轴承合适10-10解:1初选轴承型号由于轴径已确定,所以采用验算的方法确定轴承的型号;初选30207轴承,查设计手册得30207轴承的e=,Y=,C=54200N2求轴承所受的径向力119519527102072.4N 60195255rr FF⨯===+,2127102072.4637.6Nr r rF F F=-=-=3确定轴承内部附加轴向力S的方向:S1向右,S2向左4求轴承的内部附加轴向力S1=F r1 /2Y==,S2=F r2 /2Y==,5求轴承的轴向力A +S 2=960+=>>S 1,所以轴承1被压紧,轴承2被放松 F a1=A +S 2=,F a2= S 2=6求轴承的当量动载荷F a1/ F r1==>= e ,查教材表10-7取X 1=,Y 1= F a2/ F r2==<= e ,查教材表10-7取X 2=1,Y 2=0 P 1=X 1F r1+Y 1F a1=×+×= P 2=X 2F r2+Y 2F a2=1×+0×= P =max{P 1,P 2}=7求轴承寿命查教材表10-8取f t =1,10-9取f p = 答:选用30207轴承合适 10-11解: 1选择轴承材料选择轴承材料为ZCuSn10P1,查教材表10-16得ZCuSn10P1的p =15Mpa,pv =15Mpa ·m/s,v =10m/s2选择轴承宽径比据径向滑动轴承宽径比的选择范围,选取B/d =1,B =1×100 =100mm 3验算轴承工作能力 压强p 的验算:[]r 200002MPa<15MPa=100100F p p Bd ===⨯ pv 的验算:[]r 20000120012.57MPa m/s<15MPa m/s=1910019100100F n pv pv B ⨯===⋅⋅⨯v 的验算:[]3.1410012006.28m/s<10m/s=601000601000πdn v v ⨯⨯===⨯⨯答:从上面的验算可知所选择的轴承材料合理10-12解: 1选择轴承材料选择轴承材料为ZCuSn5Pb5Zn5,查教材表10-16得ZCuSn10P1的p =8Mpa,pv =15Mpa ·m/s,v =3m/s2验算轴承工作能力 压强p 的验算:[]r 50000.16MPa<8MPa=200160F p p Bd ===⨯ pv 的验算:[]r 50003000.39MPa m/s<15MPa m/s=1910019100200F n pv pv B ⨯===⋅⋅⨯v 的验算:[]3.141603002.51m/s<3m/s=601000601000πdn v v ⨯⨯===⨯⨯答:从上面的验算可知所选择的轴承材料合理 10-13解: 1查许用值查教材表10-16得ZCuSn10P1的p =15Mpa,pv =15Mpa ·m/s 2由压强p 确定的径向载荷 3由pv 确定的径向载荷答:轴承的主要承载能力由pv 确定,由2和3可知,该轴承的最大径向载荷为23875N;十一、轴11-1 判断题1× 2× 3× 4× 5√ 6√ 7× 8√ 9√ 10√ 11× 12× 13× 14× 15√ 11-2 填空题1转轴,心轴,传动轴 2心,转 3回转 4轴径5轴向定位,工作 6相对转动,键连接,花键连接 7轴端,轴向 83nPC d ≥ 9[]w 1-3e e 1.0σσ≤=d M 10应力集中 11-3 选择题1A 2A 3A 4A 5B 6A 7B 8A 9A 10C 11A 12A 13A 14A 15A 16A 11-4解:材料为40Cr 的传动轴,C 取小值98,则:07mm .5280129833=⨯=≥n P C d ,圆整为标准值取d =56mm答:轴的直径可取56mm; 11-5解:由[]3T 62.01055.9nP d τ⨯≥得[]631055.92.0⨯≤nd P T τ,则: 答:该轴能传递的最大功率为; 11-6解: 1计算支反力425.5r/min 1212==n z z n ,mm 246886N 1055.9262⋅=⨯=n PT 圆周力F t :N 21667632468862222t =⨯⨯==d T F 合力F n :N 230520cos 2166cos 0t n ===αF F 支反力:N 5.11522n r2r1===FF F2计算弯矩并绘制弯矩图。
新版《机械设计基础》课后习题参考答案
机械设计基础习题参考答案机械设计基础课程组编武汉科技大学机械自动化学院第 2 章平面机构的自由度和速度分析2-1 画运动简图。
435212-2图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的凸轮机构将使冲头 4 上下运动以达到冲压的目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
34215解答:原机构自由度运动产生干涉F=3 3- 2 4-1 = 0 ,不合理,改为以下几种结构均可:2-3试计算图2-42 所示凸轮—连杆组合机构的自由度。
K L FJC DM ED BF A ACIE Ba)b)解答: a)n=7; P l=9; P h=2,F=37-29-2 =1L 处存在局部自由度, D 处存在虚约束b)n=5; P l=6; P h=2, F=35-26-2 =1E、 B 处存在局部自由度,F、C 处存在虚约束2-4 试计算图2-43 所示齿轮—连杆组合机构的自由度。
CACB BDA D(a)(b)解答: a)n=4; P l=5; P h=1,F=34-25-1=1 A 处存在复合铰链b)n=6; P l=7; P h=3, F=36-27-3=1 B 、 C、 D 处存在复合铰链2-5先计算如图所示平面机构的自由度。
并指出图中的复合铰链、局部自由度和虚约束。
BACDE解答: a)n=7; P l h7-210 = 1C 处存在复合铰链。
=10; P =0, F=3b)n=7; P l=10; P h=0, F=37-210=1EBCDAc)n=3; P l=3; P h=2, F=3 3 -23-2 = 1D 处存在局部自由度。
d)n=4; P l=5; P h=1, F=3 4 -25-1=1HE G C DF A IBCHG'EDB AJ FGe) n=6; P l=8; P h=1, F=3 6 -2 8-1 = 1 B 处存在局部自由度,G、 G'处存在虚约束。
机械设计基础课后习题与答案

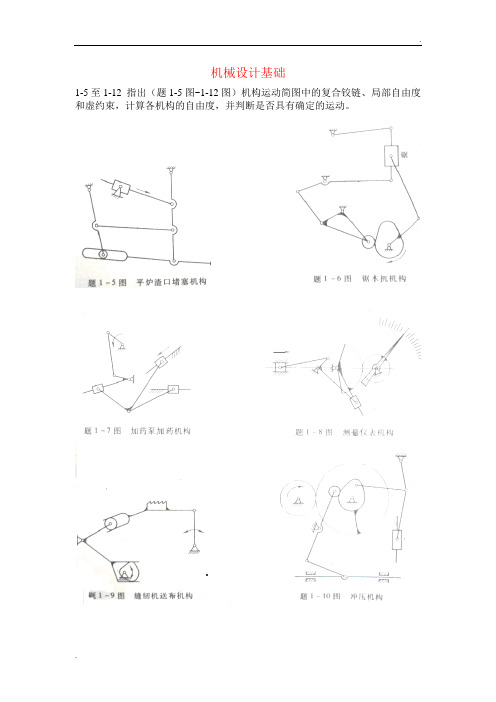
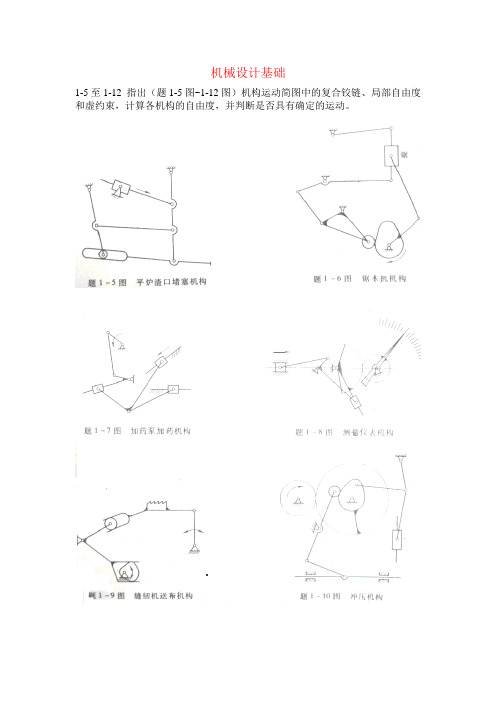
机械设计基础1-5 至 1-12 指出(题 1-5 图~1-12 图)机构运动简图中的复合铰链、局部自由度和虚拘束,计算各机构的自由度,并判断能否拥有确立的运动。
1-5 解F = 3n 2P L P H=3 6 2 8 1=11-6 解F = 3n 2P L P H=3 8 2 11 1 =11-7 解F = 3n 2P L P H=3 8 2 11 0=21-8 解F = 3n 2P L P H=3 6 2 8 1=11-9 解F = 3n 2P L P H=3 4 2 4 2 =21-10 解 F =3n 2P L P H=3 9 2 12 2=11-11 解 F =3n 2P L P H=3 4 2 4 2 =21-12 解 F =3n 2P L P H=3 3 2 3 0 =32-1 试依据题 2-1 图所标明的尺寸判断以下铰链四杆机构是曲柄摇杆机构、双曲柄机构仍是双摇杆机构。
题2-1图答 : a )40 110 150 70 90 160 ,且最短杆为机架,所以是双曲柄机构。
b )45 120 165 100 70 170,且最短杆的邻边为机架,所以是曲柄摇杆机构。
c )60 100 160 70 62 132,不知足杆长条件,所以是双摇杆机构。
d )50 100 150 100 90 190 ,且最短杆的对边为机架,所以是双摇杆机构。
2-3 画出题 2-3 图所示个机构的传动角和压力角。
图中标明箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5 图所示,要求踏板CD 在水平地点上下各摆10 度,且l CD500mm , l AD1000mm 。
(1)试用图解法求曲柄AB 和连杆 BC 的长度;( 2)用式( 2-6)和式( 2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板 CD 在水平地点上下摇动 10 ,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线地点。
机械设计基础(第五版)课后习题答案(完整版)(1)

机械设计基础(第五版)课后习题答案图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解题题2-3 见图 2.16 。
图2.16题2-7图2.19解: 作图步骤如下(见图2.19 ):(1 )求,;并确定比例尺。
(2 )作,顶角,。
(3 )作的外接圆,则圆周上任一点都可能成为曲柄中心。
(4 )作一水平线,于相距,交圆周于点。
(5 )由图量得,。
解得:曲柄长度:连杆长度:题2-9解:见图 2.21 ,作图步骤如下:(1 )求,,由此可知该机构没有急回特性。
( 2 )选定比例尺,作,。
(即摇杆的两极限位置)(3 )做,与交于点。
(4 )在图上量取,和机架长度。
曲柄长度:连杆长度:4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-11解因螺旋角端面模数端面压力角当量齿数分度圆直径齿顶圆直径齿根圆直径4-12解(1)若采用标准直齿圆柱齿轮,则标准中心距应说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不连续、传动精度低,产生振动和噪声。
(2)采用标准斜齿圆柱齿轮传动时,因螺旋角分度圆直径节圆与分度圆重合,5-1解:蜗轮2和蜗轮3的转向如图粗箭头所示,即和。
图 5.5图5.6 5-2解:这是一个定轴轮系,依题意有:齿条 6 的线速度和齿轮 5 ′分度圆上的线速度相等;而齿轮 5 ′的转速和齿轮 5 的转速相等,因此有:通过箭头法判断得到齿轮 5 ′的转向顺时针,齿条 6 方向水平向右。
5-8解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵,∴∴与方向相同5-9解:这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵设齿轮1方向为正,则,∴∴与方向相同图 5.13图5.145-10解:这是一个混合轮系。
机械设计基础(第五版)课后习题答案(整理版)
机械设计基础(第五版)课后习题答案(完整版)杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
机械设计基础课后习题答案

机械设计基础第1章平面机构自由度习题解答1-1至1-4 绘制机构运动简图。
1-11-21-31-41-5至1-12 计算机构自由度局部自由度虚约束局部自由度1-5 有一处局部自由度(滚子),有一处虚约束(槽的一侧),无复合铰链 n=6 P L=8 P H=1 F=3×6-2×8-1=11-6 有一处局部自由度(滚子),无复合铰链、虚约束n=8 P L=11 P H=1 F=3×8-2×11-1=11-7 无复合铰链、局部自由度、虚约束n=8 P L=11 P H=0 F=3×8-2×11-0=21-8 无复合铰链、局部自由度、虚约束n=6 P L=8 P H=1 F=3×6-2×8-1=11-9 有两处虚约束(凸轮、滚子处槽的一侧),局部自由度1处,无复合铰链n=4 P L=4 P H=2F=3×4-2×4-2=21-10 复合铰链、局部自由度、虚约束各有一处凸轮、齿轮为同一构件时,n=9 P L=12 P H=2F=3×9-2×12-2=1凸轮、齿轮为不同构件时n=10 P L=13 P H=2 F=3×10-2×13-2=2 图上应在凸轮上加一个原动件。
1-11 复合铰链一处,无局部自由度、虚约束n=4 P L=4 P H=2 F=3×4-2×4-2=21-12 复合铰链、局部自由度、虚约束各有一处n=8 P L=11 P H=1 F=3×8-2×11-1=1友情提示:本资料代表个人观点,如有帮助请下载,谢谢您的浏览!。
机械设计基础(第五版)课后习题答案(整理版)电子版本
机械设计基础(第五版)课后习题答案(整理版)机械设计基础(第五版)课后习题答案(完整版)杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
机械设计基础课后习题与答案
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=1 1-6 解F =H L P P n --23=111283-⨯-⨯=1 1-7 解F =H L P P n --23=011283-⨯-⨯=2 1-8 解F =H L P P n --23=18263-⨯-⨯=1 1-9 解F =H L P P n --23=24243-⨯-⨯=2 1-10 解F =H L P P n --23=212293-⨯-⨯=1 1-11 解F =H L P P n --23=24243-⨯-⨯=2 1-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动ο10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础课后习题答案(第四版)
机械设计基础课后习题答案(第四版) 第1章总论课后习题答案题1-1试述机械与机构、零件与构件、运动副与约束的涵义。
答:机械是机器与机构的总称。
其中机构是指用来传递与交换运动和力的可动的装置;机器是由若干构件以运动副相联接并具有确定相对运动,用来完成有用的机械功或转换机械能的组合体;机器用来完成有用的机械功或转换机械能,而机构在习惯上主要是指传递运动的机械(如仪表等)以及从运动的观点加以研究而言的。
机器中必包含一个或一个以上的机构。
零件是机器及各种设备的基本组成单元;根据机器功能、结构要求,某些零件需固联成没有相对运动的刚性组合,成为机器中运动的一个基本单元体,通常称为构件;构件与零件的区别在于:构件是运动的基本单元,而零件是制造的基本单元;有时一个单独的零件也是一个最简单的构件。
构件与构件之间通过一定的相互接触与制约,构成保持确定相对运动的“可动联接”,这种可动联接称为“运动副”;当构件之间用运动副联接以后,在其联接处,它们之间的某些相对运动将不能实现,这种对于相对运动的限制称为运动副的约束。
题1-2机械运动简图和装配图有何不同?正确绘制运动简图应抓住哪些关键?请画出图1-1所列机构和机械的运动简图。
陈秀宁机械设计基础教材答案答:把复杂的机械采用一些简单的线条和规定的符号将其传动系统、传动机构间的相互联系、运动特性表示出来,表示这些内容的图称为机械运动简图;装配图是表示机器或部件的图样,它是生产中的主要技术文件之一;从机械运动简图中可以清晰地看出原动机的运动和动力通过哪些机构、采用何种方式,使机器工作部分实现怎样的运动;根据运动简图再配上某些参数便可进行机器传动方案比较、运动分析和受力分析,并为机械系统设计、主要传动件工作能力计算、机件(构件和零件之统称)结构具体化和绘制装配图提供条件。
根据实际机械绘制其运动简图时,首先应分清各种机构,判别固定构件与运动构件,数出运动构件的数目,并根据构件间相对运动性质确定其运动副的类型;测量各个构件上的运动尺寸,然后根据这些尺寸选择适当的长度比例尺和视图平面用规定的或惯用的机构、构件和运动副的代表符号绘制简图;最后仔细检查运动构件的数目、运动副的类型和数目及其相对位置与联接关系等是否正确,否则将不能正确反映实际机械的真实运动。
《机械设计基础》课后习题答案
《机械设计基础》课后习题答案一、填空1、带传动的失效形式有打滑和疲劳破坏。
2、传动带中的的工作应力包括拉应力、离心应力和弯曲应力。
3、单根V带在载荷平稳、包角为180、且为特定带长的条件下所能传递的额定功率P0主要与带型号、小轮直径和小轮转速有关。
4、在设计V带传动时,V带的型号根据传递功率和小轮转速选取。
5、限制小带轮的最小直径是为了保证带中弯曲应力不致过大。
6、V带传动中,限制带的根数Z≤Zmax,是为了保证每根V 带受力均匀(避免受力不均)。
7、V带传动中,带绕过主动轮时发生带滞后于带轮的弹性滑动。
8、带传动常见的张紧装置有定期张紧装置、自动张紧装置和张紧轮等几种。
9、V带两工作面的夹角为40,V带轮的槽形角应小于角。
10、链传动和V带传动相比,在工况相同的条件下,作用在轴上的压轴力较小,其原因是链传动不需要初拉力。
11、链传动张紧的目的是调整松边链条的悬垂量。
采用张紧轮张紧时,张紧轮应布置在松边,靠近小轮,从外向里张紧。
二、选择1、平带、V带传动主要依靠(D)来传递运动和动力。
A.带的紧边拉力;B.带的松边拉力;C.带的预紧力;D.带和带轮接触面间的摩擦力。
2、在初拉力相同的条件下,V带比平带能传递较大的功率,是因为V带(C)。
A.强度高;B.尺寸小;C.有楔形增压作用;D.没有接头。
3、带传动正常工作时不能保证准确的传动比,是因为(D)。
A.带的材料不符合虎克定律;B.带容易变形和磨损;C.带在带轮上打滑;D.带的弹性滑动。
4、带传动在工作时产生弹性滑动,是因为(B)。
A.带的初拉力不够;B.带的紧边和松边拉力不等;C.带绕过带轮时有离心力;D.带和带轮间摩擦力不够。
5、带传动发生打滑总是(A)。
A.在小轮上先开始;B.在大轮上先开始;C.在两轮上同时开始;D不定在哪轮先开始。
6、带传动中,v1为主动轮的圆周速度,v2为从动轮的圆周速度,v为带速,这些速度之间存在的关系是(B)。
A.v1 = v2 = v;B.v1 >v>v2;C.v1<v< v2;D.v1 = v> v2。
机械设计基础课后习题答案--【完整版】

第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a)1010*******=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b)1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
机械设计基础课后习题与答案
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础课后习题答案全
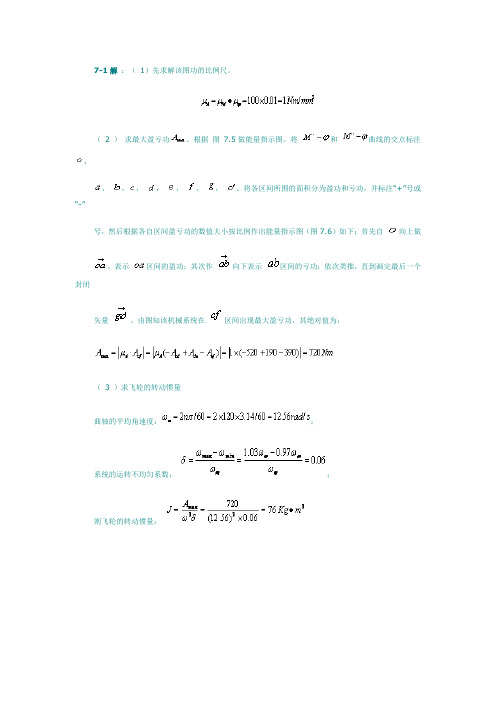
7-1解:(1)先求解该图功的比例尺。
(2 )求最大盈亏功。
根据图7.5做能量指示图。
将和曲线的交点标注,,,,,,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭矢量。
由图知该机械系统在区间出现最大盈亏功,其绝对值为:(3 )求飞轮的转动惯量曲轴的平均角速度:;系统的运转不均匀系数:;则飞轮的转动惯量:图7.5图7.67-2图7.7 图7.8解:(1)驱动力矩。
因为给定为常数,因此为一水平直线。
在一个运动循环中,驱动力矩所作的功为,它相当于一个运动循环所作的功,即:因此求得:(2)求最大盈亏功。
根据图7.7做能量指示图。
将和曲线的交点标注,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。
由图知该机械系统在区间出现最大盈亏功。
欲求,先求图7.7中的长度。
如图将图中线1和线2延长交于点,那么在中,相当于该三角形的中位线,可知。
又在中,,因此有:,则根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则。
(3)求飞轮的转动惯量和质量。
7-3解:原来安装飞轮的轴的转速为,现在电动机的转速为,则若将飞轮安装在电动机轴上,飞轮的转动惯量为:7-4解:(1)求安装在主轴上飞轮的转动惯量。
先求最大盈亏功。
因为是最大动能与最小动能之差,依题意,在通过轧辊前系统动能达到最大,通过轧辊后系统动能达到最小,因此:则飞轮的转动惯量:(2)求飞轮的最大转速和最小转速。
(3)因为一个周期内输入功和和输出功相等,设一个周期时间为,则:,因此有:。
7-5 解:图7.9一个周期驱动力矩所作的功为:一个周期阻力矩所作的功为:又时段内驱动力矩所做的功为:因此最大盈亏功为:机组的平均角速度为:机组运转不均匀系数为:故飞轮的转动惯量为:7-6答:本书介绍的飞轮设计方法,没有考虑飞轮以外其他构件动能的变化,而实际上其他构件都有质量,它们的速度和动能也在不断变化,因而是近似的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7-1解:(1)先求解该图功的比例尺。
(2 )求最大盈亏功。
根据图7.5做能量指示图。
将和曲线的交点标注,
,,,,,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”
号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做
,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭
矢量。
由图知该机械系统在区间出现最大盈亏功,其绝对值为:
(3 )求飞轮的转动惯量
曲轴的平均角速度:;
系统的运转不均匀系数:;
则飞轮的转动惯量:
图7.5图7.6
7-2
图7.7 图7.8
解:(1)驱动力矩。
因为给定为常数,因此为一水平直线。
在一个运动循环中,驱
动力矩所作的功为,它相当于一个运动循环所作的功,即:
因此求得:
(2)求最大盈亏功。
根据图7.7做能量指示图。
将和曲线的交点标注,
,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏
功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功;
其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。
由图知该机械系统在区间出现最大盈亏功。
欲求,先求图7.7中的长度。
如图将图中线1和线2延长交于点,那么在中,
相当于该三角形的中位线,可知。
又在中,,因此有:
,则
根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则。
(3)求飞轮的转动惯量和质量。
7-3解:原来安装飞轮的轴的转速为,现在电动机的转速为,则若将飞轮
安装在电动机轴上,飞轮的转动惯量为:
7-4解:(1)求安装在主轴上飞轮的转动惯量。
先求最大盈亏功。
因为是最大动能与最小
动能之差,依题意,在通过轧辊前系统动能达到最大,通过轧辊后系统动能达到最小,因此:
则飞轮的转动惯量:
(2)求飞轮的最大转速和最小转速。
(3)因为一个周期内输入功和和输出功相等,设一个周期时间为,则:,因此有:。
7-5 解:
图7.9
一个周期驱动力矩所作的功为:
一个周期阻力矩所作的功为:
又时段内驱动力矩所做的功为:
因此最大盈亏功为:
机组的平均角速度为:
机组运转不均匀系数为:
故飞轮的转动惯量为:
7-6答:本书介绍的飞轮设计方法,没有考虑飞轮以外其他构件动能的变化,而实际上其他构件都有质
量,它们的速度和动能也在不断变化,因而是近似的。
7-7 解:
图7.10图7.11
由图见一个运动循环的力矩图有四个重复图示,因此,可以以一个周期只有来计算。
(1)求驱动力矩。
一个周期内驱动力矩功和阻力矩功相等,又依题意驱动力矩为常数,
故有,
(2)求最大盈亏功。
根据图7.10做能量指示图。
将和曲线的交点标注,
,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功
的数值大小按比例作出能量指示图(图7.11)如下:首先自向上做,表示区间的盈功,
;其次作向下表示区间的亏功,
;
然后作向上表示区间的盈功,至此应形成一个封闭区间,。
由图
知该机械系统在区间出现最大盈亏功。
(3)求飞轮的转动惯量。
(4)求飞轮的质量。
由课本公式7-8:得:
7-8 解:
图7.12 图7.13
(1)求驱动力矩。
一个周期内驱动力矩功和阻力矩功相等,又依题意驱动力矩为常数,故
有:
,
(2)求最大盈亏功。
根据图7.12做能量指示图。
将和曲线的交点标注,
,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区
间盈亏功的数值大小按比例作出能量指示图(图7.13)如下:首先自向下做,表示区间
的亏功,;其次作向上表示区间的盈功,
;然后作向下表示区间的亏功,
;
作向上表示区间的盈功,至此应形成一个封闭区间,。
由图知该
机械系统在区间出现最大盈亏功。
(3)求飞轮的转动惯量。
7-9答:机械有规律的,周期性的速度变化称为周期性速度波动。
系统速度波动是随机的、不规则的,
没有一定周期的称为非周期性速度波动。
调节周期性速度波动的常用方法是在机械中加上转动惯量很大的
回转件——飞轮。
非周期性速度波动常用调速器调节。
经过调节后只能使主轴的速度波动得以减小,而不
能彻底根除。
7-10解:
图7.14图7.15
(1)先求阻力矩。
因为阻力矩为常数,故有
,
再求发动机平均功率。
一个周期内输出功为;
一个周期所用的时间为:;
因此发动机的平均功率为:。
(2)首先求最大盈亏功。
根据图7.14做能量指示图。
将和曲线的交点标注
,,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各
自区间盈亏功的数值大小按比例作出能量指示图(图7.15)如下:首先自向下做,表示
区
间的亏功;其次作向上表示区间的盈功;然后向下表示区间的亏功,至此应形成一个封
闭区间。
欲求,先求图7.15中的长度。
由图知,因此有:,则
根据所求数据作出能量指示图,见图7.15,可知最大盈亏功出现在段,则。
则求飞轮的转动惯量为
(3)若将飞轮转动惯量减小,而保持原值,可将飞轮安装在速度较高一点的轴上,设该轴的转
速为,则有:
,∴。