首届广州低空无人机大赛(2016年)
航拍策划方案
航拍策划方案篇一:航拍工作室成立策划书(初稿)航拍工作室成立策划书(初稿)一、工作室人员职责定位工作室固定人员配备4人,包括工作室主任(主要负责人)1名,外宣1名,后台运维1名,内容编辑1名。
工作室主任:主持公司的日常经营管理工作,对公司负责,组织实施总的经营计划发展方向,拟定基本的管理制度以及奖励机制。
外宣:负责总体对外工作,包括具体的会员招募、企业洽谈等。
后台运维:负责平台的设计和第三方技术开发公司对接维护。
内容编辑:负责平台资源地统计、审核、整理。
(工作室初始建立时期,各职能人员可根据实际需要,给予最需要帮助的部分一起努力。
)二、工作室经营目标定位考虑到平台的搭建和推广需要一定的时间投入渗透,资源整合和业务探索都是一个全新的过程。
现在到年底无经营目标20XX年经营目标30万(包括宣传片的拍摄费用)三、网站政策支持1、人员分配a.按照第一部分规划需要配备4人全职维护运营平台的搭建。
B.在此期间,除承接原视频中心专题制作增值业务外,不参与网站及中心其他的附加工作。
c.可灵活聘用本网兼职拍摄手,进行相关项目的拍摄。
2、启动资金a.人员工资维持中心部门工资现有的“绩效+好稿+经营”考核方案,其中绩效工资部门按照中心的整体平均值(注:中心绩效总额/中心考核人数=绩效平均值)下发到工作室进行内部二次结算。
工作室承接宣传片拍摄制作相关费用提成上调至50%(其中除去拍摄成本,设备租赁和合作相关费用。
)B.平台搭建域名10万(预估)虚拟空间、网站搭建、维护200万(预估,后期根据调研情况具体制定)c.会员招募工作室拟采用多种奖励政策用于前期平台会员的招募工作,拟需要10万元的资金投入。
1)首次注册会员并上传5条满足条件的高质量航拍视频,奖励1000元。
2)注册会员除初次上传的5条视频之外,每上传1条视频,奖励100元,500元封顶。
3)注册会员上传总数大于10条以后,按每条50元对会员进行奖励。
4)注册会员上传的视频在平台被售出之后,会员将得到每条20元的分成。
低空(无人机)一体化综合服务管理体系 研究目标

低空(无人机)一体化综合服务管理体系研究目标【低空(无人机)一体化综合服务管理体系研究目标】一、研究背景无人机技术的快速发展已经深刻地改变了许多领域,对于低空一体化综合服务管理体系的研究也成为当前的热点。
而在这一背景下,我们有必要对低空一体化综合服务管理体系的研究目标进行深入的思考和探讨。
二、研究目标的意义作为研究的出发点,我们首先应当考虑低空一体化综合服务管理体系研究目标的意义。
低空一体化综合服务管理体系的建立将会对于无人机在商业、军事、环保等领域的应用起到关键作用。
本文将从不同角度探讨低空一体化综合服务管理体系的研究目标,从而为推动无人机行业的发展提供有力支撑。
三、研究方法在详细探讨低空一体化综合服务管理体系研究目标的基础上,我们还需要认真思考研究方法。
研究方法应当结合从简到繁、由浅入深的原则,既要考虑理论研究,也要注重实践应用。
我们也将共享对于低空一体化综合服务管理体系研究方法的个人观点和理解。
四、研究目标的具体内容在对低空一体化综合服务管理体系的研究目标进行探讨后,我们将逐一详细介绍研究目标的具体内容,包括但不限于提高巡航效率、提高施工作业效率、提高航拍监测效率等方面。
通过全面深入的分析,我们将揭示低空一体化综合服务管理体系的研究目标,为读者提供深刻的理解和洞察。
五、总结与展望本文将对研究目标进行总结和回顾性的内容,以全面、深刻和灵活地理解低空一体化综合服务管理体系的研究目标。
我们也将展望未来的研究方向,并对研究目标的实现提出建设性的建议。
在漫长的研究历程中,低空一体化综合服务管理体系研究目标是非常重要的一环。
它不仅是对无人机技术发展的有力支撑,更是对于未来无人机应用前景的深刻展望。
希望通过本文的探讨,能够为读者带来新的启发和思考,也希望能够为低空一体化综合服务管理体系的研究目标提供有价值的参考。
随着无人机技术的不断发展,低空一体化综合服务管理体系的研究目标也逐渐变得更加具体和深入。
本文将进一步探讨低空一体化综合服务管理体系的研究目标,着重分析其在商业、军事、环保等领域的应用,并提出具体的研究方法和内容。
第一届川渝青少年低空飞行(航空模型、无人机)系列赛竞赛规程
.遥控四轴飞行器(无人机)穿越赛项目报到时间:2023年11月25日16:00至18:00,26日07:30至08:30; .报到地点:重庆巴南区安澜镇五通村一组昊宇航空产业园 .各参赛队报到时组委会将核验以下材料: (1)参赛承诺书; (2)身份证原件; (3)保险证明; (4)审核模型。 6.以上资料不齐全、不合格者不得参赛。 十、交通、食宿 参赛运动员比赛期间午餐、晚餐由组委会提供,并提供11月25日重庆巴南区鱼胡路三号线轻轨站(龙洲湾枢纽站 旁)至比赛场地(巴南区安澜镇五通村一组昊宇航空产业园)免费车辆、比赛场地周边酒店接驳车辆及比赛结束后返程 到接送点车辆。其他费用自理。 十一、裁判员 由市体育局统一选派。 十二、相关要求
(三)安全工作
各参加单位应加强对运动员及监护人的安全教育,安排好行程,注意路途和人身、财产安全。要做好比赛期间 出现人身意夕M为害事故的应急预案,如发生人身意夕M为害事故的,应按照应急预案积极主动处理,并向所投保 的保险公司索赔。
十三、因特殊突发情况,视情实施空场比赛、延期或取消比赛
十四、本规程解释、修改权属重庆市体育局,未尽事宜另行通知
我队详细阅读和了解本活动承诺书内容,并自愿签署本活动承诺书,承诺遵守本活动承诺书的内容。若我队有 任何I违反本活动承诺书内容行为,我队愿负法律责任并承担全部经济责任。
参赛单位:(盖章)
领队(签字):
年月日
附件:L报名表
2.参赛承诺书
附件1
第一届川渝低空飞行
青少年(航空模型、无人机)比赛报名表
参赛单位:(盖章)
姓名
领队:
教练:
性别
附件2
低空(无人机)一体化综合服务管理体系 研究目标
低空(无人机)一体化综合服务管理体系研究目标(原创实用版)目录一、研究背景二、研究目标三、研究内容四、研究方法五、预期成果正文一、研究背景随着无人机技术的快速发展和广泛应用,我国低空空域资源日益紧张,对无人机的管理和监管提出了更高的要求。
为了解决这一问题,我国正在积极推进低空一体化综合服务管理体系的建设。
在这样的背景下,本研究旨在探讨低空一体化综合服务管理体系的构建方法,以提高无人机的安全性、合规性和效率。
二、研究目标本研究旨在实现以下目标:1.分析当前我国低空空域管理现状和存在的问题,为构建低空一体化综合服务管理体系提供理论依据。
2.研究低空一体化综合服务管理体系的构建方法和实施策略,提出具有可行性的解决方案。
3.设计一套完善的无人机监管技术体系,提高无人机的安全性和合规性。
4.探索无人机一体化综合服务管理体系在各领域的应用,提升无人机行业的整体水平。
三、研究内容本研究将围绕以下几个方面展开:1.低空空域管理现状及问题分析:深入研究我国低空空域管理的现状,分析存在的问题,为后续研究提供理论基础。
2.低空一体化综合服务管理体系构建:研究低空一体化综合服务管理体系的构建方法和实施策略,包括政策法规、技术手段、管理模式等方面。
3.无人机监管技术体系设计:设计一套完善的无人机监管技术体系,包括无人机身份识别、飞行轨迹监控、实时数据分析等功能。
4.无人机一体化综合服务管理体系应用研究:探索无人机一体化综合服务管理体系在各领域的应用,如物流配送、农业植保、公共安全等。
四、研究方法本研究将采用文献分析法、案例分析法、比较分析法、系统分析法等方法,结合实际情况,对低空一体化综合服务管理体系进行深入研究。
五、预期成果通过本研究,预期将取得以下成果:1.提出我国低空一体化综合服务管理体系的构建方法和实施策略。
2.设计一套完善的无人机监管技术体系,提高无人机的安全性和合规性。
无人机培训考试

无人机考试试题姓名: 分数:时间:1。
无人机的英文缩写是()(A)。
UVS(B).UA.S(C).UA.V【答案】C2。
超轻型无人机(Ⅲ类)是指空机质量A。
大于1.5kg 小于等于4kgB。
大于15kg 小于等于116kgC。
大于4kg 小于等于15kg【答案】:C3。
超近程无人机活动半径在______以内。
A.15kmB。
15~50kmC。
50~200km【答案】:A。
4.超低空无人机任务高度一般在______之间A。
0~100mB.100~1000mC。
0~50m【答案】:A。
5不属于无人机机型的是()(A).塞纳斯(B)侦察兵(C).捕食者【答案】A6不属于无人机系统的是P6A. 飞行器平台B。
飞行员C。
导航飞控系统【答案】B7常规固定翼/旋翼平台是大气层内飞行的空气的航空器P6A. 重于B。
轻于C。
等于【答案】A。
8不属于抵消旋翼机反转力矩的方法有P11A。
尾桨B。
共轴旋翼C。
增大旋翼半径(提高升力面积)【答案】C9多轴旋翼飞行器通过改变控制飞行轨迹.P12A. 总距杆(直升机)B。
转速C. 尾桨【答案】B10目前主流的民用无人机所采用的动力系统通常为活塞式发动机和两种.P16 A。
涡喷发动机B。
涡扇发动机C. 电动机【答案】C11活塞发动机系统常采用的增压技术主要是用来。
P17A. 提高功率B. 减少废气量C。
增加转速【答案】A12电动动力系统主要由动力电机.动力电源和组成。
P20A. 电池B. 调速系统C. 无刷电机【答案】B13从应用上说,涡桨发动机适用于。
23A。
中低空。
低速短距/垂直起降无人机B。
高空长航时无人机/无人战斗机C。
中高空长航时无人机【答案】C14必须属于无人机飞控子系统的是27A. 无人机姿态稳定与控制B。
无人机任务设备管理与控制C。
信息收集与传递【答案】A15不属于无人机飞控子系统所需信息的是27A。
经/纬度(导航子系统)B。
姿态角C。
空速【答案】A16不应属于无人机飞控计算机任务范畴的是29A. 数据中继B. 姿态稳定与控制C. 自主飞行控制【答案】A17无人机通过()控制舵面和发动机节风门来实现无人机控制。
2016年-2019年无人机反制行业大数据(年中)
2016年-2019年无人机反制行业大数据(年中)摘要:近年来,随着无人飞行器飞控和导航技术的快速发展,以及集成电路等相关元器件成本不断降低,无人机行业进入了高速发展阶段。
从微小型的航拍娱乐机,到大载荷、长航时、低空高速的行业机,无人机的型号和数量不断增加,应用领域和范围不断扩大。
但与此同时,由于目前国内在低空无人飞行器管控方面还没有明确的主责部门,相关法律法规还不健全,导致无人飞行器从生产、销售到飞行使用的各个环节都处于失控状态。
社会上大量的“黑飞”现象层出不穷,给公共安全和重要敏感目标安全防护造成严重威胁。
无人机反制市场呈现爆发式增长,本文收集了国内2016年-2019年无人机反制相关项目的数据进行分析。
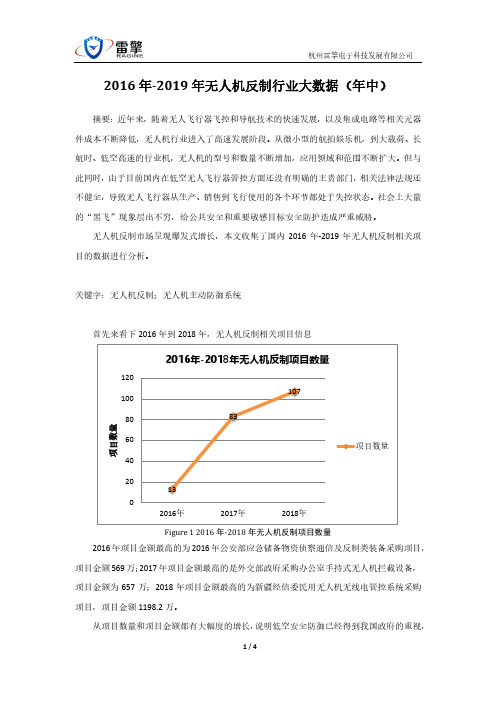
关键字:无人机反制;无人机主动防御系统首先来看下2016年到2018年,无人机反制相关项目信息Figure 1 2016年-2018年无人机反制项目数量 2016年项目金额最高的为2016年公安部应急储备物资侦察通信及反制类装备采购项目,项目金额569万;2017年项目金额最高的是外交部政府采购办公室手持式无人机拦截设备,项目金额为657万;2018年项目金额最高的为新疆经信委民用无人机无线电管控系统采购项目,项目金额1198.2万。
从项目数量和项目金额都有大幅度的增长,说明低空安全防御已经得到我国政府的重视,1383107204060801001202016年2017年2018年项目数量2016年-2018年无人机反制项目数量项目数量公安、武警、监狱等单位为主要采购单位。
2019年该行业愈加火爆,单8月份项目数量74个,单个项目金额最高超3000万,我们再来看下2019年的数据。
Figure 2 2019年3-4-5月当月招标数量Figure 3 三月份全国各省份无人机反制项目统计Figure 4 八月份全国各省份无人机反制项目统计Figure 5 8月份各地区项目占比2019年8月份数据进行细致分析,我们查看项目最多的湖北省,都是为了保障军运会的项目(军运会:第七届世界军人运动会,英文名称:7th CISM Military World Games,中文简称称“武汉军运会”或“第七届军运会”,将于2019年10月18日至27日在中国武汉举行,赛期10天,共设置射击、游泳、田径、篮球等27个大项、329个小项。
低空(无人机)一体化综合服务管理体系 研究目标
低空(无人机)一体化综合服务管理体系研究目标(最新版2篇)目录(篇1)一、研究背景和意义二、研究目标和内容三、研究方法和步骤四、预期成果和应用价值正文(篇1)一、研究背景和意义随着无人机技术的迅速发展,无人机在各个领域的应用越来越广泛。
然而,由于无人机的普及和使用,也带来了许多问题,如安全隐患、隐私保护、空域管理等。
为了更好地解决这些问题,我国需要建立一套完善的低空 (无人机) 一体化综合服务管理体系。
二、研究目标和内容本研究旨在建立一个低空 (无人机) 一体化综合服务管理体系,以提高无人机的安全性、可靠性和效率。
具体研究内容包括:1.研究无人机的法律法规、管理规定和技术标准,以了解无人机的合规性要求。
2.研究无人机的空域规划、空域管理和飞行计划,以提高无人机的飞行安全性。
3.研究无人机的监控与指挥、运行维护和应急处理,以提高无人机的运行效率。
4.研究无人机的数据管理、数据分析和数据应用,以提高无人机的数据价值。
三、研究方法和步骤本研究采用文献研究、案例分析、实地调查和专家访谈等方法,具体研究步骤如下:1.收集国内外关于无人机管理、空域管理、数据管理等方面的文献和资料,进行深入研究。
2.分析国内外典型的无人机管理案例,总结其成功经验和存在问题。
3.通过实地调查和专家访谈,了解我国无人机管理现状和问题,为研究提供实证依据。
4.结合研究成果,构建低空 (无人机) 一体化综合服务管理体系。
四、预期成果和应用价值本研究预期将建立一个较为完善的低空 (无人机) 一体化综合服务管理体系,为我国无人机管理提供理论指导和实践参考。
具体成果包括:1.提出无人机管理的法律法规、管理规定和技术标准,为政策制定提供依据。
2.制定无人机的空域规划、空域管理和飞行计划,为无人机运行提供保障。
3.建立无人机的监控与指挥、运行维护和应急处理机制,为无人机管理提供支持。
4.探索无人机的数据管理、数据分析和数据应用方法,为无人机数据价值挖掘提供途径。
首届无人机大赛

序号奖项获奖单位队名作品作品照片奖金(万元)1竞技大奖南京天一无人飞行器有限公司天一队“飞狐”号502南昌航空大学昌航竞技队昌盛通用无人机303西北工业大学、国防科技大学西工大-国防科大联队“大力士”飞机304北京理工大学、中科院大气所北理工-中科院联队远征5号10 2011年首届“中航工业杯——国际无人飞行器创新大奖赛”获奖名单竞技一等奖一、竞技赛获奖名单5北京航空航天大学北航巡天队P300010 6南京理工大学无人飞行器代表队“海星”号10 7北京航空航天大学北航X飞行队X Aviators58中航工业沈阳飞机设计研究所、沈阳航空航天大学601所-沈航联队“天弩”5竞技二等奖9厦门大学白鹭队“南强号”5 10上海交通大学上海交通大学3队YY035 11南京航空航天大学无“鱼鹰号”舰载机512创意大奖西北工业大学灵龙代表队“灵龙”(SmartLoong)30竞技三等奖二、创意赛获奖名单13西北工业大学“信鸽”侦察系统队“信鸽”侦察系统2014中航工业沈阳飞机设计研究所、沈阳航空航天大学601所-沈航联队四舵面飞翼2015“未来之星”创意奖南京航空航天大学无“金鹰”差动式仿鸟扑翼飞行器1016“使命之星”创意奖中航工业成都飞机设计研究所中航工业成都所一队垂直起降变体飞行器1017“希望之星”创意奖中国航空博物馆新概念飞行器研究室“遥控老鹰”10优秀创意奖18西北工业大学“风火轮”滚翼机队“风火轮”滚翼机2 19南京航空航天大学无“X”飞行器2 20中航工业成都飞机设计研究所中航工业成都所二队“狂战士”无人机2 21北京理工大学无流金摇摆Golden Swing222北京理工大学北理工猎鹰队Falcon“猎鹰”大角度矢量推力技术验证机2创意奖23西安飞机工业(集团)有限责任公司西飞无人机代表队SA-100“海蟒”特种无人攻击机224天津大学&阿宾哥无人机联合“北洋之星”研究室无复合式共轴反桨直升机225南昌航空大学昌航创意队“都市精灵”固定涵道无人机226南京航空航天大学无“幻翼”无舵面无人机227南京航空航天大学无“Dream Morpher”变体无人飞行器2创意奖三、其它奖项获奖名单28特别贡献奖北京航空航天大学共有6支参赛队报名“DF-30”等证书29空军工程大学共有4支参赛队报名“漫步者号”等证书优秀组织奖30中航工业沈阳飞机设计研究所共有2支参赛队报名“四舵面飞翼”等证书31山西太原12中无“乌贼号”潜艇无人机证书32福建福州18中无人飞行器队“双飞翼”证书33韩国的Aero-1队KAIST, KOREA“AeroK”证书34彭春林无“巡天戟”无人机证书35窦大宾无“大宾一号”仿蜻蜓扑翼机证书特别鼓励奖。
国内外无人机系统的研究现状
中国军转民42国内外无人机系统的研究现状■ 刘宇凡 王瀚岳摘要:随着国内无人机系统应用不断蔓延和推进各种新技术领域,无人机系统的潜在应用市场也在快速扩大,这或许也是中国无人机产业市场的巨大商机,也是吸引众多国内创业者和公司投资目光的根本缘由。
目前现在我国智能无人机产业发展迅猛,已发展成为一个备受世界关注的新兴科技行业。
以下对国内外无人机系统的技术发展趋势现状进行分析。
关键词:国内外;无人机;研究;现状一、国内无人机系统(一)国内无人机研制系统研究发展史我国自主研究无人机系统起步相对较晚,20世纪70年代,我国才正式开始进行自主开发研制无人机和侦察机,80年代初开始装备空军部队。
我国专业从事无人机研发行业的技术单位总数有300多家,形成了配套齐全的研发、制造、销售和售后服务体系的企业有160家左右。
2017-2022年中国多轴无人机装备行业发展前景研究分析及未来发展前景策略趋势研究分析报告成果表明,研制出并投入使用的无人化飞机型号已多达百余种,小型多轴无人机生产技术已逐步得到完善,战略小型无人机已成功进行试飞,攻击小型无人机也已成功试射,而空地弹道导弹多次发射成功。
我国在2014年拥有无人机市场销售量万架左右。
50%以上的高速增长在未来几年将还会持续保持,在2014年期间我国民用智能无人机产品销售市场规模已经累计达40亿元。
2002年-2015年7月,国内与智能无人机应用相关的技术专利申请1545件。
(二)国内无人机系统目前发展存在的重大问题经过中国无人机研究人员的不懈努力,无人机应用技术已经取得长足进步,性能不断稳步提高,已初步形成较为完善的现代无人机技术体系,但是在无人机发展中仍存在一些问题。
(1)行业发展规划与市场规范关系问题。
我国无人机仍然存在功能重复设备投资、低技术水平功能重复、高端三类无人机技术发展依然较落后的突出现实问题。
(2)解决发动机技术瓶颈突出问题。
我国民用无人机的技术发展在较大程度上主要受制于无人发动机,一方面由于我国无人发动机自主研制技术基础薄弱;另一方面在我国无人机特定的高空低雷诺、大幅度过载等特殊飞行能力条件下,对这种发动机也提出了特殊的技术要求。
2016年度广东省科学技术奖获奖目录(特等奖、一等奖、二等奖项目)
( 特等 奖、一等奖 、二等奖项 目 )
特 等 奖
序 号 项 目名 称 承 担单 位 东莞 市横 沥镇 人 民政府 f 海 交通 大学 东莞碑 工 学院 东 莞市 横沥 模具 利 技产 业发展 有 限公 司 上 海市 教育 委 员会科 技 发展 中, 广 东华 中科 技大 学工 业技 术研 究 院
无限极 (中国 )有 限公 司 中草药 活性 多糖 快速 筛选 、制备 关键 技术 及产 化 府 华南 工 大学 1 3 用 中国利 学 院上 海药物 研 究所 广州 中医 药大 学
西 北 大 学
新 型小型 化 多系统共 用 基站 电调 天线 系统产 品及 关键 京信 通信 按 术 (广州 )有 限公 司 1 4 技术 两 安 电子 禾 斗 技大学 北京 邮 电大 学
1 1 S S F 超快 过挥 分幅 扫描 同时成 像 记录 仪
中 国科学 院 两安光 学精 密机 械研 究所 中 国工程 物理 研究 院流 体 物理研 究所
{ 团
获 奖 榜 单
序号 项 目名称
1 2 高 白度 日用玻 璃陶 瓷制 品的 关键 技术 及产业 化
承 担单 位 广 东健诚 高 科玻 璃制 品股份 有 限公 司 华 南珲 工大 学 潮卅 l 市 陶瓷 行 、 t 办 会
4 抗 抑 郁新 靶点 和新 手段 的研 究 南 方医科 大学
5 脑 信 号分 析算 法与 非侵入 式脑 机 接 口研 究 6 会属 有机 骨架 材料 f = j ‘ ] 改性 及 其催 化府 用堪 础研 究
华南珲 工 大学 清 华 大学 华南 工 大学
7 早 中 晚兼 用犁 广适性 优质 稻新 品 种黄 华 占的选 有及其 广 东省 农 业科 学院水 稻研 究所 府 用 广 东省 农业 科 学院植 物保 护研 究 所 8 水 稻 生物 育种技 术体 系创 新 与新 品种创 制 府用 华 南农 业 大学 中国科 学院 华南植 物 嘲 深 圳市 铁汉 生态 环境 股份 有 限公司 棕 榈生 态城 镇发 展股 份有 限公 司 华 南农 大 学 湛 江市神 州 木兰 园林 有 限公司 中 国医 学科 学院 药用 植物 研究 所海 南 分所
一种无人战斗机飞行轨迹的跟踪方法

一种无人战斗机飞行轨迹的跟踪方法徐圣良【摘要】为解决无人战斗机在受到较大气流扰动干扰时,轨迹跟踪出现航向偏离,控制精度不好的问题,提出一种基于Lyapunov稳定性渐进泛函的无人战斗机飞行轨迹跟踪控制算法.构建无人战斗机飞行运动数学模型,建立无人战斗机飞行轨迹坐标系,进行控制约束参量分析和飞行轨迹跟踪控制目标函数构建.采用自适应律进行航向轨迹的姿态角跟踪,根据Lyapunov稳定性渐进泛函,实现无人战斗机俯仰角度跟踪,实现跟踪误差反馈补偿控制.仿真结果表明,采用该算法进行无人战斗机飞行轨迹跟踪控制,能提高飞行稳定性和控制鲁棒性,误差收敛到零.【期刊名称】《西安工程大学学报》【年(卷),期】2016(030)004【总页数】7页(P464-470)【关键词】无人战斗机;飞行轨迹;跟踪控制;Lyapunov泛函【作者】徐圣良【作者单位】海军陆战学院陆战队系,广东广州510430【正文语种】中文【中图分类】TP273无人驾驶飞机简称“无人机”(Unmanned Aerial Vehicle,UAV),无人机广泛应用在军事侦察、野外勘探和危险环境监测等领域.从技术角度定义,无人机包括无人直升机、无人固定翼机、无人多旋翼飞行器、无人伞翼机等.随着机械自动化制造技术和人工智能技术的发展,无人机制造工艺和飞行惯导控制方法得到较大发展和改进,在军事和民用等领域具有广阔的发展前景.无人机具有隐蔽性好、机动性强、全天候发射和回收性好的特点,被广泛应用在军事领域.军用无人机主要有无人侦察机、无人战斗机等,无人战斗机在遂行飞行作战中具有较好的高空突防性和低空机动性.无人战斗机飞行作战的技术难点在于飞行轨迹的跟踪控制,通过对无人战斗机飞行轨迹的跟踪控制,保障无人战斗机飞行的稳定性和安全性,相关控制算法研究受到人们的重视.无人战斗机的飞行轨迹分布在整个纵向和横向的三维飞行平面中,由于大气密度等飞行条件的不断变化以及无人机的隐身性和机身流线性特点,导致对无人战斗机飞行轨迹跟踪控制的难度较大.传统方法中,对无人战斗机飞行轨迹跟踪方法主要有基于Terminal滑模面控制的轨迹跟踪算法、基于最陡下滑轨迹跟踪的飞行控制算法、基于模糊神经网络控制的飞行轨迹跟踪控制算法等[1-4].上述算法设计建立在无人机为一个刚体模型结构基础上,无人机飞行轨迹为一个标准能量梯度下降模型,通过飞行动力学模型构建和控制算法设计,实现轨迹跟踪,取得一定的研究成果.其中,文献[5]提出一种基于固定攻角下滑的无人战斗机航向校正算法,实现对飞行轨迹跟踪控制,采用积分滑模面自适应重构,进行飞机稳定性动力学模型构建,采用固定攻角下滑控制,实现轨迹跟踪及航向修正,提高飞行稳定性,但是该控制算法的计算开销较大,对轨迹跟踪的实时性不好;文献[6]提出一种基于积分滑模控制的最陡下滑轨迹中无人战斗机的轨迹跟踪方法,采用无人战斗机纵向平面的Terminal滑模面标准能量梯度修正,实现惯导积分,提高飞行控制的抗干扰能力,但是随着气流扰动的增大控制稳定性降低;文献[7]采用反演积分控制方法,当受到较大的气流扰动时,轨迹跟踪出现航向偏离,控制精度不好.因此,本文提出一种基于Lyapunov稳定性渐进泛函的无人战斗机飞行轨迹跟踪控制算法,构建无人战斗机的飞行运动数学模型,进行控制约束参量分析并构建飞行轨迹跟踪控制的目标函数,实现飞行轨迹跟踪控制算法优化设计和控制稳定性分析,最后通过仿真实验进行无人战斗机的飞行控制性能测试.1.1 模型设计及参量分析为实现对无人战斗机的飞行轨迹跟踪控制,提高飞行稳定性,构建无人战斗机飞行轨迹跟踪控制模型.首先对无人战斗机飞行运动参量信息进行原始数据及运动特征信息采集和分析.利用陀螺仪、加速度计和姿态基准采集器等传感器进行原始数据采集,结合信息融合滤波器和航向控制器,进行姿态校正和航向跟踪,采集参数主要有角速度、飞行加速度、横滚角等[8-13].在姿态基准一致的情况下,通过伺服机构进行飞行轨迹的误差跟踪补偿和融合滤波,结合Lyapunove稳定性控制进行姿态调整,最后指导舵机操舵.根据上述控制原理,得到本文设计的无人战斗机飞行轨迹跟踪控制模型总体结构框图,如图1所示.根据图1进行飞行稳定性控制和轨迹跟踪.根据上述控制原理,进行无人战斗机飞行轨迹跟踪约束参量分析,无人战斗机飞行轨迹跟踪模型建立在如下几个坐标系上: (1) 无人战斗机飞行速度坐标系Ox3y3z3 无人战斗机的质心为坐标系原点O,选取无人战斗机质心加速度矢量V为Ox3轴;Oy3轴与Ox3轴垂直,且位于无人战斗机加速度矢量的纵轴内,向上为正,Oz3轴通过法相投影与Ox3y3平面保持非线性映射关系.(2) 无人机刚体坐标系Ox1y1z1 体坐标系与无人战斗机的惯导控制系统连接,无人战斗机的质心为坐标原点O,Ox1指向无人机的加速度方向,固定攻角下滑平面内与无人战斗机的纵轴重合,Oy1向上为正,Oz1按右手定则确定.(3) 地球坐标系Ox2y2z2 无人战斗机在不确定气流扰动下的质心为坐标系原点,选取无人战斗机非线性自适应反演横滚矢量V为Ox2轴,Oy2轴在一个铅垂平面内,且无人战斗机的动压方向向上为正,Oz2轴按照右手定则确定.(4) 横滚坐标系Axyz 横滚坐标系Axyz是一种与飞行控制横滚特征向量匹配的坐标系.无人战斗机质心在地面上的投影作为坐标系的原点,Ay轴与飞行稳定性控制的铅垂面垂直,向上为正.根据上述坐标系构建模型,假设无人机机身为一个刚体模型[14-16],得到无人战斗机飞行轨迹跟踪控制的约束参量模型,用下面四元微分方程组表示为其中:V表示无人战斗机的航向动量;m和h分别是无人战斗机的空间运动的横滚及滑翔变量;n表示最大升阻比下滑轨迹的门控变量;Cm是飞行控制的滑模横舵角;Iext表示角速度;gNa、gk和gL是无人战斗机的飞行弹道偏角、迎角、升阻比,通过加入角速度反馈信号进行飞行系统的根轨迹模拟.VNa、Vk和VL分别表示无人战斗机质心的速度、超调误差和纵向倾角.1.2 模型构建通过上述构建的无人战斗机飞行轨迹跟踪的坐标系模型和约束参量分析,进行无人战斗机的飞行运动数学模型构建,得到运动方程描述为其中:θ为无人战斗机弹道倾角,表示飞行跟踪法相向量与速度矢量(Ox2轴)的夹角;ϑ为无人机左偏舵角,即无人战斗机的纵轴(Ox1轴)与水平面(Oxy平面)间的夹角;α为无人战斗机极限摆舵的战位角,即无人战斗机质心的速度矢量(Ox3轴)在纵向对称面Ox1y1上的投影与Ox1轴之间的夹角;ωx、ωy为无人战斗机分别绕体坐标系Ox1、Oy1轴的旋转角速度;δz为弹道轨迹跟踪误差;e1为右舵角跟踪误差;m为无人战斗机刚体的质量;X,Y为作用在无人战斗机的总空气动力沿速度坐标系分解得到的动量矩、横滚力矩和侧向力;Mz为俯仰力矩;为无人战斗机质心加速度在俯仰跟踪曲面中的法相影,又称法向加速度;为无人战斗机侧向运动在纵向坐标平面Ox1y1z1轴上的分量.根据上述模型可得到无人机轨迹跟踪控制的运动状态特征系数满足根据飞行流体动力和力矩的稳定性误差补偿原理,得到无人战斗机在飞行轨迹跟踪的闭环增益具有H∞性能,选取Lyapunov函数作为无人战斗机飞行轨迹跟踪的标准方程,在无横滚侧向水平作用力下,无人机飞行轨迹的跟踪判别统计量为其中,P、R为侧向运动的线性化增益力矩.则Vk沿运动回归方向的蛇形搜索弹道模型为当w(k)=0时,无人机失衡条件下的单独侧向飞行轨迹运动特征函数满足其中传统飞行轨迹跟踪控制采用反演积分控制方法,当受到较大气流扰动时,轨迹跟踪出现航向偏离,控制精度不好.因此,本文提出一种基于Lyapunov稳定性渐进泛函的无人战斗机飞行轨迹跟踪控制算法.通过上述构建的无人战斗机飞行运动数学模型,进行控制约束参量分析和飞行轨迹跟踪控制的目标函数构建.在未知气流扰动下,无人战斗机飞行轨迹控制跟踪参量模型满足当式(16)成立时,无人战斗机的航向需要进行校正,以保证飞行稳定性.无人战斗机在整个飞行过程中飞行惯导控制为一个非线性确定性的离散二元方程,控制目标函数为其中:x(k)∈Rp,表示无人战斗机滑翔段的加速度状态;u(k)∈Rq,表示横滚侧向水平应力特征值;z(k)∈Rm,表示无人战斗机飞行的动静力平衡系数矩阵;A,B,C为模型参数矩阵.考虑系统在初始条件一定时战斗机航向校正的李雅普洛夫函数为u(k)=Kx(k),在干扰和模型参数不确定时,通过适当的稳定性反馈控制,进行俯仰角误差跟踪,实现反馈补偿,过程可描述为采用自适应律进行航向轨迹的姿态角跟踪,考虑存在不确定时延下无人战斗机的横滚侧向应力,得到无人机线性化轨迹跟踪控制的输出状态方程为引入横舵纵倾振荡等干扰问题,在一定飞行高度、离地心距离下,无人战斗机的纵向运动控制率状态方程描述为其中:w(k)∈Rn,表示无人机在失衡下飞行的连续扰动向量,即w(k)∈L2(0,∞);A,B,C,D,F1,F2为实际弹道的参量矩阵;ΔA1、ΔB1为无人机飞行控制的正回旋稳定解,在不确定变量输入下,得到无人机飞行控制的Lyapunov稳定性增益为ΔA1=GFA1,ΔB1=GFB1.其中:G∈Rr×l、A1∈Rl×p、B1∈Rl×q为侧向传递函数;F∈Rl×l为未知扰动成分参量的矩阵,当满足流体动力学的稳定性特征条件FTF≤I,变量r、l为正整数.此时输出的水平等速回旋弹道轨迹为通过上述描述,基于Lyapunov稳定性渐进泛函,依据Barbalat定理,得到飞行轨迹的误差修正过程等价于可见无人战斗机在位置扰动下通过流体力学控制,在限定的干扰状态下,轨迹跟踪的弹道可靠性条件为其中,γ>0为常数,w(k)≠0,而当w(k)∈L2[0,∞),无人战斗机飞行轨迹跟踪的回旋弹道控制误差满足根据Lyapunove稳定性原理,可得其中,无人战斗机飞行轨迹信息特征采样的陀螺仪稳定度为根据Lyapunov稳定性渐进泛函实现无人战斗机的俯仰角度跟踪,得到侧向俯仰角度跟踪误差为对式(28)进行求导,得引入积分项ζ1进行无人战斗机的水平面纵向控制,定义e1(τ)d(τ).定义Lyapunov函数为对无人战斗机飞行控制器的Lyapunov函数求导,可知其小于零.根据Lyapunove 稳定性原理可得,采用本文算法进行无人战斗机的飞行轨迹跟踪控制,是渐进收敛和稳定的.为测试本文设计算法在实现无人机飞行轨迹跟踪和稳定性控制中的性能,进行仿真实验.采用Matlab 7作为仿真工具进行算法设计,系统软件的开发平台是VisualDSP++4.5,开发环境IDDE,还包括VDK、专家连接器VCSE.设无人战斗机飞行初始速度为256m/s,在水平飞行下的初始高度为10 000m,初始俯仰角度为0°,进入横滚飞行阶段的前1.4s,打极限上舵,进行校正以保证飞行稳定性,俯仰角在最陡下滑控制下,角度从0°增加到32°,在经历一定的单独侧向飞行后平飞角稳定在22°,进行纵向平面飞行.首先进行飞行姿态数据采集,对各个通道数据进行8通道均匀线列阵A/D采样,采样时间间隔0.02s,得到初始的飞行姿态数据结果如图2所示.以上述采样的飞行姿态数据为输入,采用陀螺仪、加速度及和姿态基准采集器等传感器进行无人战斗机飞行原始数据采集,结合信息融合滤波器和航向控制器进行姿态校正和航向跟踪,采用本文设计的控制模型进行飞行稳定性控制,得到在加入干扰后的飞行轨迹跟踪航向角和飞行轨迹跟踪控制误差,如图3所示.从图3可知,采用本文算法进行无人战斗机飞行轨迹跟踪,航向角跟踪性能较好,飞行轨迹跟踪控制误差能线性收敛到零,说明采用本文方法在进行无人机飞行控制时具有较好的稳定性和鲁棒性.无人战斗机飞行作战的技术关键在于飞行轨迹的跟踪控制,通过对无人战斗机飞行轨迹跟踪控制,保障无人战斗机飞行的稳定性和安全性,提出一种基于Lyapunov 稳定性渐进泛函的无人战斗机飞行轨迹跟踪控制算法,构建无人战斗机飞行运动数学模型,进行控制约束参量分析和飞行轨迹跟踪控制目标函数构建,进行飞行轨迹跟踪控制算法优化设计和控制稳定性分析,最后通过仿真实验进行无人战斗机飞行控制性能测试.实验分析表明,采用本文方法进行无人战斗机飞行轨迹跟踪和航向控制,性能较好,稳定性和鲁棒性较优.[2] 邸斌,周锐,董卓宁. 考虑信息成功传递概率的多无人机协同目标最优观测与跟踪[J]. 控制与决策,2016,31(4):616-622.[3] WEISS S,ACHTELIKk M W,LYEN S,et al. Monocular vision for long-term micro aerial vehicle state estimation:A compendium[J]. Journal of Field Robotics,2013,30(5):803-830.[4] 王勋,张代兵,沈林成. 一种基于虚拟力的无人机路径跟踪控制方法[J]. 机器人,2016,38(3):329-336.[5] 贾立双,李家军,冯志涛,等. 深海高可靠声学应答释放器设计与实现[J]. 电子设计工程,2015,23(12):1-3.[6] TAN C P,EDWARDS C. Robust fault reconstruction in uncertain linear systems using multiple sliding mode observers in cascade[J]. IEEE Transactions on Automatic Control,2013,55(4):855-867.[7] TONG Shaocheng,HUO Baoyu,LI Yongming. Observer based adaptive decentralized fuzzy fault-tolerant control of nonlinear large scale systems with actuator failures[J]. IEEE Transactions on Fuzzy Systems,2014,22(1):1-15.[8] HAN S I,LEE J M. Fuzzy echo state neural networks and funnel dynamic surface control for prescribed performance of a nonlinear dynamic system[J]. IEEE Transactions on Industrial Electronics,2014,11(2):1099-1112.[9] XU Yinyin,TONG Shaocheng,LI Yongming. Prescribed performance fuzzy adaptive fault-tolerant control of non linear systems with actuator faults[J]. IET Control Theory and Applications,2014,8(6):420-431.[10] 邹胜宇,刘振,高海波,等. 基于干扰力时间积分的悬吊漂浮物随动控制方法[J]. 机器人,2015,37(1):1-8.[11] HUANG Xia,WANG Zhen,LI Yuxia,et al. Design of fuzzy statefeedback controller for robust stabilization of uncertain fractional order chaotic systems[J]. Journal of the Franklin Institute,2015,35(12):5480-5493.[12] ZHONG Fulin,LI Hui,ZHONG Shouming,et al. An SOC estimation approach based on adaptive sliding mode observer and fractional order equivalent circuit model for lithium ion batteries[J]. Communications in Nonlinear Science and Numerical Simulation,2015,24(1):127-144 [13] AGUILA CAMACHO N,DUARTE MERMOUD M A,GALLEGOS J A. Lyapunov functions for fractional order systems[J]. Communications in Nonlinear Science and numerical Simulation,2014,19(9):2951-2957.[14] 刘恒,李生刚,孙业国,等. 带有未知非对称控制增益的不确定分数阶混沌系统自适应模糊同步控制[J]. 物理学报,2015,64(7):070503.[15] 余淮,杨文. 一种无人机航拍影像快速特征提取与匹配算法[J]. 电子与信息学报,2016,38(3):509-516.[16] 孙克辉,贺少波,董燕青. 简化洛伦兹混沌系统的追踪同步控制[J]. 信息与控制,2015,44(4):393-397.XU Shengliang.A flight path tracking method for unmanned combat aircraft[J].Journal of Xi′an Polytechnic University,2016,30(4):464-470.【相关文献】[1] 葛立志. 基于全弹道控制分析的水下航行器攻击模型视景仿真[J]. 舰船电子工程,2015,35(3):137-141.。
探讨无人机在低空航摄遥感测绘技术

探讨无人机在低空航摄遥感测绘技术摘要:低空无人机航拍遥感测绘技术是国家测绘新技术,是提高国家测绘领域的重要创新,在测绘领域得到了广泛好评。
低空无人机航拍遥感测绘技术具有高效、灵活、高分辨率、低成本等优点,能够有效提高国家测绘质量,对测绘领域的发展起到积极的推动作用。
阐述了低空无人机航空遥感测绘技术的优缺点,详细介绍了低空无人机航空遥感测绘技术的应用。
关键词:低空无人机;航空遥感;测绘技术;工程测量一、低空无人机航拍遥感测绘技术的优势1、高效快捷、灵活无人机是近年来出现的一种新型无人机。
无人机具有生产成本低、结构简单的特点,而利用无人机进行低空航拍灵活快捷。
低空无人机航空遥感测绘技术是一项安全性高、效率高、使用灵活的新技术。
具体来说:一是低空无人机航空遥感测绘技术,依托无人机的存在,消除了人类驾驶的限制,受自然条件影响较小。
可拍摄突发事件或进入人员无法到达的恶劣环境。
其次,在需要即时获取测绘成果的应急测绘中,低空无人机航空遥感测绘技术可以起到在短时间内获取高清影像数据的作用,为应对紧急突发事件提供有效依据。
再次,面对自然灾害,使用低空无人机航拍遥感测绘技术比人员直接测绘更高效快捷,有助于救援。
第四,低空无人机航空遥感测绘技术对场地使用要求低,无人机机身比较轻便,启动灵活,大大提高了测绘效率。
2、通过在低空工作,可以获得高分辨率的图像该无人机机构简单,操作快捷,可低空飞行。
这就大大避免了高空云层对飞行和航拍的影响。
具体表现为:一是忽略云层的影响,可以随时进行航拍。
低空无人机航拍遥感测绘技术可以忽略高空云层的影响,低空飞行可以避开云层的影响。
第二,无人机可以在离地表非常近的距离进行航拍,可以从多个角度进行航拍,获得高分辨率的影像数据。
再次,无人机低空飞行时,飞行高度可从50米到100米,测绘精度可达1: 1000,精度范围可达0.1米到0.5米。
这是低空无人机航拍遥感测绘技术的主要优势之一。
第四,低空无人机航空遥感测绘技术是由无人机实施的实时测绘技术,通过相关技术设备将航空数据同步传输到地面,通过地面人员的操作快速得到结果。
无人机低空摄影测量在城市测绘保障中的应用前景

045GLOBAL CITY GEOGRAPHY 无人机低空摄影测量在城市测绘保障中的应用前景孙林军(乌鲁木齐市城市勘察测绘院,新疆 乌鲁木齐 830000)摘要:近几年来城乡开发区段在快速拓展,亟待增设搭配测绘的新途径。
传统流程内的航空摄影设定了繁琐的流程,浪费资金;但是在较短时段内还不能完成预设的测量任务。
所以无人机低空摄影测量目前已广泛应用于定点监控、高压线路监察、影视航拍、空中监测、地理勘察等领域。
也逐步成为小范围、高精度、实时城市测量的重要平台。
因此,本文解析了无人机测量现有的技术,摸索无人机测量进展中的应用前景。
关键词:无人机低空摄影测量;城市测绘发展;信息获取城市测量的方式主要包括传统测绘、卫星遥感、大型飞机航拍、定点摄像、手持或车载式信息采集和小型无人机等。
与其他方式相比,除了花费成本低以外,无人机低空摄影测量系统还具有高清晰、大比例尺、小面积、高现势性的优点,是卫星遥感(如表1)与普通航空摄影不可缺少的补充。
可为大比例尺影像地图生产、重点地区正射影像制作、高精度 DEM 格网和 DLG 产品提供高分辨率清晰影像数据源,满足城市信息化建设对大比例尺基础地理空间数据的需求,为城市建设提供有效的测绘保障。
而且在重点区域或小范围区域航测上更有得天独厚的优势,能够快速获取高质量高分辨率的遥感影像。
表1 卫星遥感系统示意图1.无人机摄影测量1.1无人机低空摄影的作业流程无人机摄影测量一般一个小组配备3-5 人左右即可, 在航拍结束以后必须对数据进行检查, 检查合格后可进行后续影像处理工作。
1.2解析技术内涵地形测量选取的无人机有着灵活优势,自身成本较少。
借助这样的装置,拍摄可得较大范畴的某区段景物。
无人机便捷获取低空的、高精度的明晰影像,增添了拍摄实效(如图1)。
图1从现存技术看,无人机测量涵盖了如下:选取野外区段内的拍摄点、测得精准的数值、内业特有的加密、测量流程内的数字测图。
这样的步骤内,关键点被设定成内业加密,它输出对完善的城市水循环系统。
低空(无人机)一体化综合服务管理体系 研究目标

低空(无人机)一体化综合服务管理体系研究目标
摘要:
一、引言
二、低空(无人机) 一体化综合服务管理体系的定义和重要性
三、研究目标与任务
四、研究方法与技术路线
五、预期成果与展望
正文:
一、引言
随着无人机技术的飞速发展,其在农业、物流、环保、公共安全等领域的应用越来越广泛,低空无人机一体化综合服务管理体系的研究成为了我国无人机产业发展的关键。
二、低空(无人机) 一体化综合服务管理体系的定义和重要性
低空无人机一体化综合服务管理体系,是指在无人机飞行活动全过程中,通过建立和完善相关的政策法规、技术标准、安全管理、服务保障等机制,实现无人机飞行活动的安全、高效、有序进行。
这一体系对于推动我国无人机产业发展,提高社会生产效率,保障国家安全具有重要意义。
三、研究目标与任务
本研究旨在建立低空无人机一体化综合服务管理体系,具体目标包括:
1.梳理现有低空无人机相关政策法规和技术标准,分析存在的问题和不足;
2.分析低空无人机飞行活动中的安全风险,提出针对性的安全管理措施;
3.研究低空无人机飞行活动中的服务保障需求,探索有效的服务保障模式;
4.提出完善低空无人机一体化综合服务管理体系的政策建议。
四、研究方法与技术路线
本研究将采用文献分析、案例分析、实地调研等方法,结合无人机产业发展现状,系统分析低空无人机一体化综合服务管理体系的构建。
五、预期成果与展望
本研究预期能形成一套完善的低空无人机一体化综合服务管理体系,为我国无人机产业的健康、有序发展提供有力支持。
低空(无人机)一体化综合服务管理体系 研究目标

低空(无人机)一体化综合服务管理体系研究目标摘要:一、引言二、低空(无人机) 一体化综合服务管理体系的背景与意义三、研究目标与任务四、低空(无人机) 一体化综合服务管理体系的构建五、实施策略与措施六、总结与展望正文:一、引言随着科技的不断发展,无人机技术在我国已得到广泛应用,如航拍、物流、农业、环保等多个领域。
为了推动无人机产业的持续发展,提高无人机应用的规范化、安全化水平,我国正在积极研究构建低空(无人机) 一体化综合服务管理体系。
本文将对此进行详细探讨。
二、低空(无人机) 一体化综合服务管理体系的背景与意义低空(无人机) 一体化综合服务管理体系旨在整合各方资源,优化管理流程,为无人机行业提供全面、高效、便捷的服务。
通过建立这一体系,可以降低无人机运营成本,提高行业整体竞争力,为我国无人机产业的长远发展奠定基础。
三、研究目标与任务研究目标为构建低空(无人机) 一体化综合服务管理体系,包括完善相关政策法规、建立高效的管理平台、实现数据共享与信息互联互通、加强安全监管等。
研究任务主要包括:1) 梳理国内外无人机管理经验与教训;2) 分析我国无人机产业发展现状及面临的问题;3) 提出低空(无人机) 一体化综合服务管理体系的构建方案。
四、低空(无人机) 一体化综合服务管理体系的构建1.完善政策法规:制定无人机飞行规定、无人机驾驶员资格认证、无人机保险等方面的法规,为无人机产业发展提供法律保障。
2.建立高效的管理平台:整合各方资源,建立信息共享、协同管理的平台,提高无人机行业管理效率。
3.实现数据共享与信息互联互通:通过构建统一的数据标准和接口规范,实现各部门之间的数据共享,提高无人机行业整体运行效率。
4.加强安全监管:建立无人机飞行监控系统,对无人机飞行进行实时监控,确保无人机飞行的安全性。
五、实施策略与措施1.强化顶层设计:从国家战略层面制定无人机产业发展规划,明确低空(无人机) 一体化综合服务管理体系的构建目标与路径。
低空无人机遥感技术及应用
低空无人机遥感技术及应用
03 1.研Par究t 背景 典型应用案例
44
3.1典型应用案例
无人机在遥感中的应用广泛,如重大突发事件和自然灾害的 应急响应、国土资源的数据采集与监测、各种地形信息的调 查与测绘、农业植保、农业保险、环境保护、交通、能源、 互联网和移动通讯等。
45
3.1农林业中的应用
51
3.2国土资源环境调查与测绘
目前全国已有超过300家测绘单位拥有甲乙级航摄资质,使 用无人机数量超过千架。 测绘无人机已常态化应用在土地确权、基础测绘、土地资源 调查监测、土地利用动态监测、数字城市建设等领域。 生态环境方面:水污染、土壤污染等。
52
3.2国土资源环境调查与测绘
测绘无人机已常态化应用在土地确权、基础测绘、土地资源 调查监测、土地利用动态监测、数字城市建设、应急救灾测 绘等领域。 生态环境方面:水污染、土壤污染等 目前全国已有超过300家测绘单位拥有甲乙级航摄资质,使 用无人机数量超过千架。
21
2.低空无人机遥感的工作流程
⑤确定摄影基线
22
2.低空无人机遥感的工作流程
(2)飞行前检查 ① 地面监控站 ② 飞行平台 ③ 载荷传感器检查 ④ 发动机检查 ⑤ 电池、燃油检查 ⑥ 通电检查
23
2.低空无人机遥感的工作流程
图 航线设计示意图
24
2.低空无人机遥感的工作流程
(3)地面控制点布设与测量(不是必须的) 像控点的布设:以实验区地形特点及制作影像图的精度来布设像 控点,以能够满足空中三角测量精度要求为原则。 像控点的测量:主要采用单基准站RTK卫星快速定位方法测量。
2. 数据处理 (1)航测数据预处理 ① POS数据与航带整理 ② 像片畸变改正 ③ 像片匀光匀色
AOPA试题-无人机概述与空域法规.

AOPA试题-⽆⼈机概述与空域法规.概述1.近程⽆⼈机活动半径在。
A.⼩于15kmB.15-50kmC.50-200km(解析:书本定义P3)2.超近程⽆⼈机活动半径在以内。
A.⼩于15kmB.15-50kmC.50-200km(解析:书本定义P3)3.中程⽆⼈机活动半径为。
A.50-200kmB.200-800kmC.>800km(解析:书本定义P3)4.超低空⽆⼈机任务⾼度⼀般在之间。
A.0-100mB.100-1000mC.0-50m(解析:书本定义P3)5.⽆⼈机系统飞⾏器平台主要使⽤的是空⽓的动⼒驱动的航空器。
A.轻于B.重于C.轻于(解析:书本定义P6)6. 航空器平台结构通常包括机翼、机⾝、尾翼和起落架等。
A.单旋翼B.多旋翼C.固定翼(解析:书本定义P8)7.微型⽆⼈机是指。
A.空机质量⼩于等于7千克的⽆⼈机B.质量⼩于7千克的⽆⼈机C.质量⼩于等于7千克的⽆⼈机(解析:书本定义P2)8.轻型⽆⼈机是指。
A.质量⼤于等于7千克,但⼩于116千克的⽆⼈机,且全鸟为平飞中,校正空速⼩于 100千⽶/⼩时<55海⾥/⼩时),开限⼩于3000⽶B.质量⼤于7千克,但⼩于等于116千克的⽆⼈机,且全马⼒平飞中,校正空速⼤于 >100千⽶/⼩时(55海⾥/⼩时),升限⼤于3000⽶C.空机质量⼤于7千克,但⼩于等于116千克的⽆⼈机,且全马⼒平飞中,校正空速⼩于100千⽶/⼩时(55海⾥/⼩时),升限⼩于3000⽶(解析:书本定义P3)9.⼤型⽆⼈机是指。
A.空机质置⼤于5, 700千克的⽆⼈机B.质量⼤于5,700千克的⽆⼈机C.空机质量⼤于等于5, 700千克的⽆⼈机10.⽆⼈机的英⽂缩写是:A. UVSB. UA.SC. UA.V(解析:UAS的简称是⽆⼈机系统,UVS是紫外光谱仪)11.不属于⽆⼈机机型的是:A.塞纳斯B.侦察兵C.捕⾷者(解析:侦察兵是美国U-2有⼈机)12.不属于⽆⼈机系统的是:A.飞⾏器平台B,飞⾏员C.导航飞控系统(解析:常识)13. II级别⽆⼈机指:A. 1公⽄≤空机质量≤7kg,2公⽄≤起飞全重≤15kgB. 0.5公⽄≤空机质量≤7kg,1.5公⽄≤起飞全重≤15kgC. 1公⽄≤空机质量≤7kg,1.5公⽄≤起飞全重≤15kg14. I级别⽆⼈机指:A.空机质量≤1kg,起飞全重≤1.5kgB.空机质量≤0.5kg,起飞全重≤1.5kgC.空机质量≤1kg,起飞全重≤2kg系统组成及介绍1.⽬前圭流的民⽤⽆⼈机所罕⽤的动⼒系统通常为活塞式发动机和。
(完整版)无人机相关准则
(完整版)无人机相关准则引言无人机近年来得到广泛应用,但其使用也带来了许多安全和隐私等方面的问题。
为了规范无人机的使用,保障公众的安全和个人的权益,我们制定了以下无人机相关准则。
无人机的注册和许可1.所有无人机用户都必须完成相关的注册和许可程序。
这包括对无人机本身进行登记,并且必须持有合法的飞行执照。
2.相关部门和机构应设立专门的注册平台,方便用户进行登记和许可申请。
飞行限制和安全措施1.无人机在使用过程中必须遵守相关飞行限制和安全措施,包括但不限于:- 飞行高度限制:在人口密集地区和特定的非飞行区域内,无人机的飞行高度应受到限制。
- 飞行速度限制:无人机在低空飞行过程中必须控制飞行速度,以确保安全。
- 飞行距离限制:无人机的飞行距离应受到限制,禁止进入敏感区域和重要设施附近。
2.无人机必须配备必要的安全设备,包括但不限于:- 防撞装置:无人机应配备防撞装置,以减少与其他飞行物体的碰撞可能性。
- 无线电通信装置:无人机应配备无线电通信装置,确保与其他空中交通参与者的沟通。
隐私保护1.无人机不得侵犯他人的隐私权和个人信息保护。
在飞行过程中,无人机用户应遵守以下规定:- 无人机不允许携带或使用任何侵犯他人隐私的设备,如摄像头或无线监听设备。
- 无人机不得用于非法监视、偷窥或录像行为。
2.无人机用户应尊重他人的隐私权,不得在未经许可的情况下,通过无人机拍摄、发布、传播或使用他人的个人信息。
灾害和紧急情况下的应急措施1.在灾害和紧急情况下,无人机可以被使用来进行救援和监测等任务。
在这种情况下,无人机用户应遵守以下规定:- 需要与相关救援机构和地方政府协调,确保无人机使用的合法性和安全性。
- 无人机用户应尽量避免对其他救援工作造成干扰。
2.相关部门和机构应建立相关的应急机制和合作机制,确保无人机在灾害和紧急情况下的有效使用和协调。
结论本准则为无人机的使用提供了一套规范和指导,旨在确保无人机的安全和合法使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首届广州低空无人机大赛(2016年)竞赛规则(初稿)第一章总则(一)各参赛队领队负责本队的训练和参赛过程中的组织工作,教导本队自觉遵守竞赛规程、规则,服从竞赛组委会和裁判的安排,同时做好本队的纪律、安全、文明行为、环境卫生等教育工作。
(二)领队应按要求参加竞赛工作会议,可以对规程、规则等事项提出咨询。
遇争议或异议时,按组委会的决议执行。
(三)在各项比赛中只允许裁判员、有关工作人员、当场比赛的参赛选手及其助手进入比赛场地。
(四)比赛开始前 30 分钟静场、静空,关闭遥控设备,并切断无人机电路,防止因干扰造成误开机的现象。
(五)比赛时,经当值裁判3次检录点名不到者,视作该轮比赛弃权。
参赛队不论何种原因耽误比赛责任自负。
(六)参赛选手放飞时,可以助跑或跳跃,但不得在台、架、建筑物或 0.5 米以上的高物上放飞。
(七)比赛根据需要可设助手,比赛只计团队成绩。
(八)比赛所用及电池均由参赛者自行准备。
允许对飞机进行必要的加强和改动,并对飞机的安全性负责。
(九)参赛飞行机的审核采用自审,赛前将组织飞机性能的测试,并根据悬翼机类型、尺寸进行分组,不符合所参加比赛项目要求的飞机不得参加该项比赛(十)凡是危及安全、妨碍比赛的飞机装置,大赛组委员有权禁止参赛队使用。
(十一)参赛选手须在参赛上标注自己的单位名称或者姓名。
参赛选手的飞机不能互相调用。
每轮比赛结束时,参赛选手须在成绩单上签名,否则本轮比赛成绩无效。
(十二)遇能见度差、气象条件改变或其它不适合比赛的原因,由组委会研究权决定更改竞赛日程、赛场、比赛轮次。
(十三)各参赛队在比赛过程中,如发生下列行为,将视为严重犯规,组委会有权视其情节轻重给予警告、取消该轮成绩直至取消全部比赛资格的处罚:a.比赛中故意妨碍、影响他人竞赛,故意损坏他人飞机。
b.比赛过程中,参赛队及相关人员违反无线电遥控发射机管理规定或在场外擅自使用无线电遥控发射机。
c.比赛过程中,弄虚作假,破坏赛场纪律,不听从裁判员劝导,妨碍竞赛正常进行。
(十五)以下情况该轮成绩判为零分: 声明弃权;起飞点名三次未到;在比赛规定时间内未能起飞。
(十六)比赛中遇争议时,各参赛队须由领队向裁判委员会提出。
现场急待解决的问题可由领队向当值裁判口头提出,但不得妨碍竞赛的进行。
凡是与竞赛成绩有关的意见应在竞赛成绩公布后30分钟内向组委会提出,过时不予受理。
(十七)比赛号位和分组由抽签随机确定比赛排序。
(十八)起飞前参赛选手必须向裁判员申请,经允许后方起飞。
(十九)遇下列情况时,总裁员有权决定竞赛中断或延迟进行:a)起飞时顺风或正侧风平均风速大于9m/s;b)气象条件恶劣,阻碍竞赛正常进行;c)出现可能导致严重后果的不安全因素或状况。
(二十)安全措施a)禁止一切可能有危害公共安全的飞行;b)竞赛场地设飞行区和安全区,禁止非工作人员和非上场参赛队员进入飞行区,禁止参赛作品飞入安全区;c)参赛者必须对飞行器的安全做好处置预案,制定应急操作程序和特情处置办法;d)参赛者需在比赛上场前熟悉比赛规则,确保飞行器在规定空域飞行,不得飞入安全区。
当出现危及安全的状况时,应能及时切入安全遥控应急模式;e)参赛者应服从比赛现场管理和指挥。
(二十一)使用频率使用频率应符合中国国家无线电管理委员会的频率分配规定。
应在报到时申明使用频率,一经申明不得更改。
第二章赛风赛纪为弘扬优良赛风、严肃赛纪,杜绝不良行为和违纪现象的发生,确保赛事的顺利进行,特制定本规定。
一、各代表队和人员要树立正确的参赛观,牢固树立遵纪守法、公平竞赛的观念,共同维护竞赛秩序,保证赛事顺利进行。
二、各代表队和人员要自觉维护竞赛规程、规则的严肃性和权威性;遵守赛场纪律;尊重裁判、服从裁判;不得扰乱赛场秩序、干扰裁判员正常执法;不得弄虚作假,违反规则规定。
三、各代表队必须保证教练员、队员和工作人员切实做到文明礼貌、遵纪守法、顽强拼搏、公平竞赛、相互促进、赛出风格。
不得发生以下行为:(一) 在竞赛飞机上弄虚作假。
(二) 以行贿、引诱、胁迫、干扰等手段对裁判员施加影响,使其不能公正执行比赛规程、规则以谋取成绩。
(三) 有意伤害对手,打架斗殴,停赛、罢赛、闹事、损坏公物等。
(四) 不服从裁判,不听从指挥,不尊重或辱骂、追打裁判员、工作人员。
四、裁判员和其他工作人切实做到遵纪守法、公正廉洁、坚持原则、不徇私情,做到严肃、认真、公正、准确。
不得发生以下行为:(一) 接受参赛队以奖励、酬谢等各种名义所送的钱、物。
(二) 以权谋私、徇私舞弊、弄虚作假、执裁不公、失职渎职。
(三) 仪容不整、言行不端、作风不正、对待工作马马虎虎、敷衍了事。
(四) 执法不严、工作不力,对不良行为和违纪现象姑息迁就、听之任之甚至袒护包庇。
五、实行赛风赛纪责任制,责任人应承担的责任为:(一) 各代表队领队,对本参赛队的赛风赛纪工作负总责。
对教练员、队员的赛风赛纪工作负主要领导责任。
(二) 各代表队领队,对本参赛队队员的赛风赛纪工作负主要领导责任。
(三) 组委会对本次比赛的的赛风赛纪工作负有主要领导责任。
(四)个人对自己的行为负直接责任。
六、如违反以上规定,将追究相关人员的责任,根据其违规的情节和造成的后果,进行相应的处罚:(一) 对队员弄虚作假的,取消该队员参赛资格和比赛成绩,追究有关人员责任,并通报批评,视情节可赛后追加处罚。
(二) 对代表队弄虚作假的,取消该代表队参赛资格,取消该代表队所有比赛成绩, 追究有关人员责任,并通报批评。
(三) 对违规裁判员视情节给予警告等通报批评。
(四) 对违规工作人员视情节给予警告并通报联盟。
(五) 对于触及法律的交有关部门处理。
第三章比赛细则一、专业级无人机竞赛比赛项目一:抗风性能-轻舞飞扬1.比赛内容比赛过程中使用轴流式排烟机模拟风场环境,并使用测风仪测出5级风(风速9米/秒),由选手使用无线电遥控器控制参赛无人机,挂载物体(65轴距2kg、110轴距2kg、150以上轴距5kg)进入模拟的风场环境,在距离地面2米的高度悬停1分钟,然后在风场环境下降落并停机,随后用遥控控制飞机起飞,并再次在距离地面2米的高度悬停1分钟,然后脱离风场环境着陆。
2. 参赛要求参赛无人机必须为电动多悬翼无人机,按照65轴距、110轴距、150以上轴距3种进行区分,不限定悬翼数量,所有参加该项目的无人机均应具有防水功能。
3.比赛方法A、每架参赛无人机只进行一轮比赛,按照最终成绩进行排名。
B、参赛选手在做好起飞准备后,向裁判示意,经裁判员同意后起飞,飞机起飞开始计时,飞机着陆计时结束。
C、每架参赛飞机必须按规定完成比赛动作。
D、本项目比赛采用各级别参赛组同时进行,同组级别逐人逐架飞机比试的方式。
4.时间该项目完成整套动作,标准用时3分钟。
5.裁判本比赛项目设裁判6名:主裁3名,负责整个各轴距组别比赛计时和最后分数统计;助理裁判3名,负责监视飞机高度、悬停,同时负责中间悬停计时。
6.评分评分满分为100分,规定时间内按照规定要求完成预定动作的可计满分,有下列情况按照评分要求进行扣分。
A、参赛飞机中途坠机、着陆后不能起飞等不能完成规定比赛动作的不计成绩。
B、参赛飞机进入风场环境后,动作未完成中途脱离风场环境的每次扣5分。
C、飞机完成悬停动作时,悬停不稳,位置、高度离移超过1米扣3分,每增加1米加扣3分,脱离风场环境超过10秒,悬停计时重新开始。
D、中途悬停时间不够即开始下一个动作的,按规定动作未完成处理。
E、整套动作完成,且不超过标准用时不加分,超过标准时间的,每30秒扣5分,不足30秒按30秒计算。
F、参赛飞机完成任务期间,载重物体不能掉落,出现物体掉落的扣10分。
E、飞机在完成规定动作前提下:测试飞机仍能正常起降,且部件完好的不扣分;不能正常起降的扣20分;能正常起降,但有非关键部件损坏的扣10分。
7.场地设置器材①轴流式排烟机3台辆。
用于风场模拟风场环境。
②2kg重物体,用于参赛飞机搭载。
如铁块等受雨淋后不吸水,不增加额重量的材质,重物体积小于30cm*30cm*30cm的正方体或长方体。
③魔术贴绑带。
用于固定配重物,该器材由参赛选手根据自己参赛飞机性能准备,组委会将不备相关材料。
④半径0.5米圆形不干胶或地贴,起飞点3个、降落点3个。
⑤秒表6块,比赛计时。
⑥警戒线、雪糕筒,用于区域隔离。
⑦位置标识杆12根(长2米),用于标识风场范围⑧文件夹、签字笔、指挥旗各3套。
场地布设比赛现场临时设制,根据风机模拟风场的大小、范围,布置裁判、参赛选手准备位置和飞机降落位置,并用位置标识杆标出测试风场区域,同时用警戒线将裁判位置、准备位置和风场隔离。
比赛项目二:负载性能-力拔千钧1.比赛内容本项目通过对参赛飞机负重能力的比较,选出负重性能较优秀的机型。
比赛时由选手使用无线电遥控器控制参赛无人机,挂载重物,重量由参赛选手根据参赛飞机进行租合(重量有1kg、2kg、5kg、10kg物体)。
飞手操控飞机完成起飞、按路径飞行、降落,且按路径飞行高度不得低于3米,飞机起飞和降落平稳。
2. 参赛要求参赛无人机必须为电动多悬翼无人机,按照65轴距、110轴距、150以上轴距3种进行区分,不限定悬翼数量和电池。
3.比赛方法A、比赛采用直接评选制,无初赛、复赛,按照最终成绩进行排名。
B、每参赛选手有3次试飞机会,以成功负载最重的试飞计最终成绩。
C、每架参赛飞机必须按规定完成起飞、按路径飞行、降落3个动作,且按路径飞行不得小于1圈。
D、本项比赛3个不同轴距同时进行。
E、3次试飞更换飞机,但3次必须使用同一型号飞机。
4.时间每次试飞时间不超过3分钟。
5.裁判本比赛项目设裁判6名,每2名负责一个轴距组别。
6.评判本项目不采用评分制,以参赛飞机负载重量为首要评判依据,有下列情况时按如下评判规定执行。
A、参赛飞机负裁重量相同时,参赛飞机所使用电池容量小者获胜。
B、参赛飞机负裁重量相同,且使用电池容量相机时,参赛飞机完成规定动作所用时间短者获胜。
C、参赛飞机负重起飞后,不能够按照规定路径完成飞行的,该次试飞不计成绩。
D、参赛飞机中途坠机,或不能完成规定比赛动作的不计成绩。
E、参赛飞机负重起飞和降落不平稳,有弹跳,降落超过起降点范围1米以上的,该次试飞不计成绩。
F、参赛飞机完成任务期间,载重物体不能掉落,出现物体掉落的该次试飞不计成绩。
7.场地设置器材①1kg、2kg标准重物各15个(每组各5个),5kg、10kg标准重物各6个(每组各2个)。
②配重物体,用于参赛飞机负载。
可以是铁块、砖块、水泥块等重量固定,且不容易分散、不吸水的物体,重物体积最大体各不得大小30cm*30cm*30cm的正方体或长方体。
③魔术贴绑带。
用于固定配重物,该器材由参赛选手根据自己参赛飞机性能准备,组委会将不备相关材料。