三相四桥臂逆变器的工作原理分析与控制
采用三相四桥臂抑制逆变器共模干扰
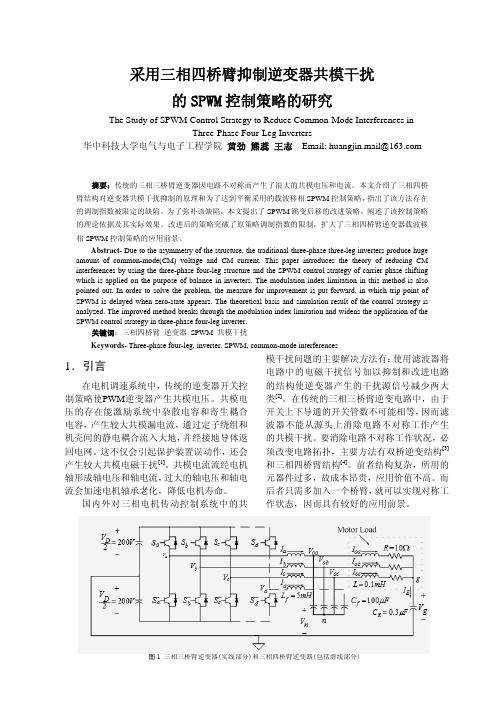
采用三相四桥臂抑制逆变器共模干扰的SPWM 控制策略的研究The Study of SPWM Control Strategy to Reduce Common-Mode Interferences inThree-Phase Four-Leg Inverters华中科技大学电气与电子工程学院 黄劲 熊蕊 王志 Email: huangjin.mail@摘要:传统的三相三桥臂逆变器因电路不对称而产生了很大的共模电压和电流。
本文介绍了三相四桥臂结构对逆变器共模干扰抑制的原理和为了达到平衡采用的载波移相SPWM 控制策略,指出了该方法存在的调制指数被限定的缺陷。
为了弥补该缺陷,本文提出了SPWM 跳变后移的改进策略,阐述了该控制策略的理论依据及其实际效果。
改进后的策略突破了原策略调制指数的限制,扩大了三相四桥臂逆变器载波移相SPWM 控制策略的应用前景。
Abstract- Due to the asymmetry of the structure, the traditional three-phase three-leg inverters produce huge amount of common-mode(CM) voltage and CM current. This paper introduces the theory of reducing CM interferences by using the three-phase four-leg structure and the SPWM control strategy of carrier phase shifting which is applied on the purpose of balance in inverters. The modulation index limitation in this method is also pointed out. In order to solve the problem, the measure for improvement is put forward, in which trip point of SPWM is delayed when zero-state appears. The theoretical basis and simulation result of the control strategy is analyzed. The improved method breaks through the modulation index limitation and widens the application of the SPWM control strategy in three-phase four-leg inverter.关键词:三相四桥臂 逆变器 SPWM 共模干扰Keywords- Three-phase four-leg, inverter, SPWM, common-mode interferences1.引言在电机调速系统中,传统的逆变器开关控制策略使PWM 逆变器产生共模电压。
不平衡负载下三相四桥臂逆变器的控制与实现

一、概述在现代电力系统中,逆变器作为电能转换的重要设备,广泛应用于各种领域,如风电、光伏发电、电动汽车等。
三相四桥臂逆变器作为一种常见的逆变器结构,在实际应用中,由于负载不平衡等因素的影响,会对其控制和性能产生一定的影响。
针对三相四桥臂逆变器在不平衡负载下的控制与实现进行研究,对于提高逆变器的稳定性和性能具有重要意义。
二、三相四桥臂逆变器基本结构和工作原理三相四桥臂逆变器是一种常见的逆变器结构,其基本结构由六个功率器件组成,可以实现对三相交流电源的逆变输出。
在正常工作情况下,三相四桥臂逆变器的工作原理是利用PWM技术对输入的直流电压进行调制,从而实现对输出三相交流电压的控制。
在负载平衡的情况下,逆变器可以实现良好的性能。
三、不平衡负载对三相四桥臂逆变器的影响在实际应用中,由于负载的不平衡性,如负载的不对称、不匹配等因素会对三相四桥臂逆变器的工作产生影响。
主要表现在以下几个方面:1. 输出电压波形失真:负载不平衡会导致逆变器输出的三相电压波形失真,影响其稳定性和性能。
2. 电流不平衡:负载不平衡还会导致逆变器输出的三相电流不平衡,存在功率因数低、损耗大等问题。
3. 逆变器保护失效:负载不平衡会加大逆变器内部元件的损耗,使其保护功能失效,从而影响系统的安全性。
四、不平衡负载下三相四桥臂逆变器的控制策略针对不平衡负载下三相四桥臂逆变器的影响,可以采取以下控制策略进行改进和优化:1. 直接控制策略:通过对逆变器输出电压和电流进行实时检测和调整,实现对不平衡负载的即时响应。
2. 功率均衡控制策略:通过对三相输出功率进行均衡调整,实现对负载不平衡的自适应调节,提高逆变器的整体性能。
3. 容错控制策略:在逆变器输出发生不平衡时,引入容错机制,及时对系统进行保护和修复,确保逆变器的稳定运行。
五、不平衡负载下三相四桥臂逆变器的实现技术在实际工程中,对于不平衡负载下三相四桥臂逆变器的实现,可以采用以下技术手段进行:1. 基于DSP的控制算法:利用数字信号处理器(DSP)实现对逆变器的实时控制和调节,提高控制精度和速度。
三相四桥臂逆变器的工作原理分析与控制

三相四桥臂逆变器的工作原理分析与控制工作原理分析:在逆变器的工作过程中,控制器会周期性地对桥臂上的开关状态进行调整。
每个桥臂由两个开关管组成,可以分为上桥臂和下桥臂。
通过合理地控制这些开关管的导通和断开,可以实现稳定的输出电压。
当上桥臂的开关管导通时,直流电源正极的电流会经过对应的桥臂,流向负极。
而当下桥臂的开关管导通时,负极的电流会经过对应的桥臂,流回到直流电源。
通过不断切换上桥臂和下桥臂的开关管状态,可以使电流在直流电源和负载之间循环流动,从而实现交流电流的输出。
控制:为了实现对输出电压的精确控制,控制器需要根据输入信号,即所需输出电压的幅值、频率和相位来确定桥臂的开关状态。
一种常用的控制方法是基于PWM技术的空间矢量调制(SVPWM)控制。
在这种方法中,控制器根据所需输出电压的大小和方向,通过调整上桥臂和下桥臂开关管的导通时间来控制输出电压的幅值和相位。
具体来说,控制器会将所需输出电压在α-β坐标系上对应的矢量进行分解,然后根据所得到的矢量值来确定开关状态。
实际控制中,控制器会根据输入信号来计算相应的开关状态,并通过控制信号发送给桥臂上的开关管。
控制器可以采用各种算法和控制策略来实现精确的电压控制,例如PID控制、模糊控制等。
总结:三相四桥臂逆变器通过合理控制桥臂上的开关状态,可以将直流电能转换为交流电能。
它采用PWM技术,通过调整开关管的导通和断开时间来控制输出电压的幅值、频率和相位。
控制器根据输入信号计算桥臂的开关状态,并发送给对应的开关管,从而实现对输出电压的精确控制。
三相四桥臂逆变电源的设计毕业设计
浦江学院2015 届毕业设计(论文)题目:三相四桥臂逆变电源的设计专业:电气工程及其自动化班级:浦电气1105姓名:张杨指导老师:梅磊起讫日期:2015-01~2015-062015年6月三相四桥臂逆变电源的设计摘要传统的三相逆变电源采用三桥臂结构,但是在不对称负载情况下,三相输出电压会产生负序分量和零序分量,这些因素会干扰系统的输出效果,造成系统三相电压输出不对称。
为了抑制这种不对称的情况,本文引用了三相四桥臂拓扑结构。
三相四桥臂逆变电源可以在三相负载不对称时保持三相输出电压的对称输出,且具有系统容量小成本较低的优点。
本文通过建立三相四桥臂逆变电源的数学模型,由数学模型可以得到输出电压和电感电流等各个变量之间的关系,从而实现对输出电压的控制。
本文构建了基于瞬时对称分量法下四桥臂逆变器的平均模型,该逆变器在带三相不平衡负载的情况下,可以提供三相对称电压。
三相电压和电流通过瞬时对称分量法可以分解为瞬时的正序、负序和零序分量,并在各自的参考系中转变成直流信号,再分别加以PI控制。
同时本文给出了控制器设计的详细推导和软件实现方法。
关键词:三相四桥臂逆变电源,数学模型,对称分量,三相对称电压The Design of Three-phase Four-leg InverterAbstractConventional three-phase inverter adopts three-leg topology. But when the loads are unsymmetric, undesired components of negative sequence and zero sequence which come from three-phase output voltages will cause unsymmetric output in system. For the sake of suppressing the asymmetry, a three-phase four-leg inverter which is proposed in this paper can ensure the three-phase symmetrical outputs when the loads are unsymmetric, in addition it has the advantage with smaller capacity and lower cost.This paper establish four bridge three-phase inverter arm of the mathematical model, the model can get four bridge three-phase inverter arm of the output voltage and current, inductance of the relationship between the different variables, so it can realize the output voltage control.The thesis have built average models of a four-leg inverter based on the symmetrical components, and proposed a improved control strategy. Symmetrical components of three-phase voltage and current are decomposed into DC quantities which can be controlled by PI in their respective reference systems. This paper describes the detailed derivation of controller design and software implementation.Keywords: four-leg three-phase inverter,mathematical model,symmetrical components,The three-phase symmetrical voltage目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1本课题研究背景以及研究意义 (2)1.2本课题的研究现状 (3)1.2.1 具有带不对称负载能力的三相逆变电源 (4)1.2.2 三相四桥臂逆变电源研究现状 (5)1.3本课题的主要研究内容 (6)第二章三相逆变器的数学模型 (7)2.1在ABC静止坐标系中建立三相三桥逆变器的数学模型 (8)2.2在ABC静止坐标系中建立三相四桥臂逆变器的数学模型 (9)2.3三相四桥逆变器在dqo旋转坐标系中的数学模型 (10)2.4本章小结 (11)第三章三相四桥臂逆变电源的控制策略 (12)3.1 对称分量法的理论与实现方法 (13)3.2 正负零序分量的平均模型 (14)3.3 正序、负序和零序分量的控制策略 (15)3.4 系统仿真实验 (16)3.5 本章小结 (17)第四章三相四桥臂逆变电源系统的硬件设计 (18)4.1 三相四桥臂逆变电源系统的总体设计 (19)4.2 三相四桥臂逆变电源系统的硬件设计 (20)4.2.1 功率主电路设计 (21)4.2.2 LC滤波电路和控制电路设计 (22)4.2.3 实验结果波形及分析 (23)4.3 本章小结 (24)结语 (25)参考文献 (26)致谢 (27)第一章绪论1.1本课题研究背景以及研究意义随着世界经济的快速发展,地球上的石油煤矿等一次性能源已被人类消耗殆尽。
基于PID和重复控制的三相四桥臂逆变器的研究

基于PID和重复控制的三相四桥臂逆变器的研究路颜;高锋阳;张红生【摘要】在三相四桥臂逆变器被解耦成三个单相逆变器的基础上,提出了一种PID与重复控制相结合的控制策略。
首先采用开关周期平均法和旋转坐标变换,建立旋转坐标系下的平均大信号模型,在此模型的基础上设计简单明了的PID控制器。
其次对整个系统进行重复控制器的设计,居于外环的重复控制可以减小周期性扰动产生的畸变,提高系统的稳态性能。
仿真结果表明,在不平衡负载和非线性负载情况下,逆变器都能够保持完好的电压输出特性和良好的动态特性。
%A control strategy with PID and repetitive control was proposed, which was based on the three-phase four-leg inverter being decoupled into three single-phase inverters. Firstly, the switch cycle average method and the rotary coordinate transformation were used to establish average large signal model in rota-ting coordinate system. In addition, a simple PID controller could be designed based on this model. Then , a repetitive controller was applied to the whole system and the repetitive controller in outer loop re-duced the distortion generated by periodic disturbance as well as enhanced steady state performance of the system. The results showed that output voltage characteristics and dynamic state performance of the in-verter were excellent under unbalanced load and nonlinear load conditions.【期刊名称】《郑州大学学报(理学版)》【年(卷),期】2016(048)001【总页数】5页(P91-95)【关键词】三相四桥臂逆变器;单相逆变器;PID控制;重复控制;解耦控制【作者】路颜;高锋阳;张红生【作者单位】兰州交通大学自动化与电气工程学院甘肃兰州730070;兰州交通大学自动化与电气工程学院甘肃兰州730070;兰州交通大学自动化与电气工程学院甘肃兰州730070【正文语种】中文【中图分类】TM464与带分裂电容的三相四线逆变器、组合式三相四线逆变器和工频变压器隔离的三相四线逆变器等拓扑结构相比,三相四桥臂逆变器具有电路形式简单,质量小,体积小以及电压利用率高等优点[1].三相四桥臂逆变器输出电能质量主要取决于调制方法和控制器的设计[2].文献[3—4]采用三维空间PWM调制方法,该方法电压利用率高,开关频率较低,但是计算十分复杂.文献[5—6]采用特定谐波注入法,在一定程度上提高了电压利用率,但它更倾向于在电机驱动方面的应用,不太适合于不间断电源等逆变电源的控制.针对以上问题,本文将PID与重复控制相结合,应用到三相四桥臂逆变器的控制中,得到稳定的三相正弦输出电压,使系统具有良好的鲁棒性和动态特性.三相四桥臂逆变器的拓扑结构如图1所示.可以看出,三相四桥臂逆变器是在普通三相逆变器的基础上增加了一组臂对,该臂对的中点通过电感Ln与负载中性点连接在一起.Udc和ip分别表示直流母线电压与电流,ia、ib、ic和in表示流过各相滤波电感的相电流.Uag、Ubg、Ucg表示A、B、C各相的输出电压.Si(i=a+、a-、b+、b-、c+、c-、f+、f-)表示各个桥臂上开关管的开关函数,当Si=1时,表示此桥臂开通,反之,当Si=0时,表示此桥臂关断.依据开关周期平均法进行运算,得到各相电路的占空比为dag、dbg和dcg,根据电流回路分析可以得到对各个输入变量、输出变量进行相对应的坐标变换:式中:Ud、Uq、U0、id、iq、i0为在旋转坐标系下各相的相电压和相电流;dd、dq、d0为在旋转坐标系下各相的占空比.各个桥臂均已解耦,控制部分设计相对简单.0通道可以完全独立于其他两个通道进行设计,将d、q通道之间的耦合影响部分增添到扰动部分,得到系统在旋转坐标系下的平均大信号模型如图2所示.PID控制具有结构简单、鲁棒性好且易于实现等优点.对三相四桥臂逆变器d轴和q轴的耦合项-ωLiq、ωLid、ωCUq和-ωCUd进行电压前馈解耦,得到旋转坐标系下PID控制的等效模型如图3所示.可以看出,输入参考电压为Ur,负载电流的扰动信号为I0,得到整个系统的闭环传递函数为该系统的闭环特征方程为式中:kd、kp和ki分别表示PID控制中的比例、积分和微分参数;0轴时L=L+3Ln.通过上述分析得知,整个控制系统是一个高阶系统,控制比较复杂.此系统的动态特性主要由主导极点决定,文献[7]详细介绍了极点配置过程,满足系统动态要求的参数为式中:ζ=0.707,n=10,ω=5 000 rad/s,L=Ln=1.8 mH,C=30 μF.可以得到d、q轴的PID控制参数为kd=0.002 3,kp=13.846,ki=47 722.5;0轴的PID控制参数为kd=0.009 2,kp=58.384,ki=190 890.根据内模原理可知,重复控制对死区影响以及其他周期性扰动具有很好的抑制作用,并且能够消除跟踪误差,使系统尽可能地达到无稳态误差形式[8—9],重复控制系统结构框图如图4所示.P(z)是控制对象,死区效应和其他扰动等效为扰动量d(z).1/ZN为周期延迟环节,与Q(z)组合为正反馈延迟环节.固有延迟环节的存在会延缓整个重复控制系统的作用时间,必须添加相位补偿环节Zk,使整个系统提前k拍进行校正.为了提高稳定性,减少稳态误差,加入重复控制增益Kr.S(z)为相位补偿环节,r(z)为输入参考电压,y(z)为输出电压,e(z)为误差值.Q(z)一般为一个低通滤波器[10],也经常取小于1的常数[11],为了设计方便,Q(z)取常数0.95.消除被控对象的谐振峰值,采用陷波器,即零相移滤波器[12],其传递函数为单独的零相移滤波器不具备高频衰减能力,需要与二阶滤波器相互结合.d、q轴传递函数为0轴传递函数为N=200,要求通带内必须要有严格的线性相位,用z9进行补偿.重复控制增益Kr是为了保证系统在中频段和高频段的稳定性,Kr=0.9.系统设计参数如下:直流母线电压为600 V,各相滤波电感为1.8 mH,各相滤波电容为30 μF,开关频率为10 kHz,输出电压频率为50 Hz.1) 当三相四桥臂逆变器接不平衡负载时,令RA=30 Ω,RB=20 Ω,RC=10 Ω时,逆变器的电压、电流输出波形如图5和图6所示.从图6可以看出,由于负载的不同,其电流幅值相差比较大.但是经过闭环控制系统的调整,从图5可以看出,三相输出电压幅值基本一致,调节时间为0.04 s,即在0.04 s以后,整个系统进入基本稳定状态,三相电压的谐波畸变率分别为1.26%、1.31%、1.28%.可以看出,当外界负载因出现干扰发生变化时,电压仍能按照预期的目标输出,具有一定的抗干扰性.2) 当三相四桥臂逆变器接非线性负载时,A相接二极管半波整流阻感负载,令RA=(40+j12) Ω,RB=20 Ω,RC=10 Ω时,逆变器的电压、电流输出波形如图7和图8所示.从图8可以看出,由于接的是非线性负载,电流幅值相差更大.但是经过闭环系统的控制,从图7可以看出,三相输出电压波形较为理想,三相电压的谐波畸变率分别为2.13%、1.43%、1.38%.谐波畸变率比接不平衡负载的情况要大一些,但是依然满足总谐波畸变率低于5%的要求.接不平衡负载的系统是最难实现控制的,也就是说,它的干扰是最大的,但是三相电压仍然以幅值基本相等的形式输出,证明该系统的鲁棒性较强.图9为逆变器接非线性负载时的拓扑结构图,A相负载为单相半波可控整流电路,在仿真中代表非线性负载,其中电阻R=40 Ω,滤波电感L1=12 mH.通过以上两种情况可以看出,随着负载的变化,三相输出电流的幅值也进行相应变化,三相输出电压通过PID和重复控制的闭环控制,在经过短暂的调整之后,很快达到了预期的效果.在三相四桥臂逆变器解耦为三个单相逆变器的基础上进行设计,将重复控制策略引入三相四桥臂逆变器,结合PID控制,构成双环控制,相辅相成,完成对整个系统的控制与实现,使其输出电压波形能够达到预期的效果.然后在三相不平衡负载和非线性负载的情况下进行仿真验证,仿真结果表明,逆变器输出的电能质量高,谐波含量相对较小,抗干扰能力较强.所设计的PID和重复控制双环控制策略,具有良好的有效性和可行性,整个系统具有很好的鲁棒性和动态特性.【相关文献】[1]DXION J W,GARCIA J J,MORAN L.Control system for three-phase active power filter which simultaneously compensates power factor and unbalanced loads[J] .IEEE transactions on industrial electronics,1995,42(6):636—641.[2]孙尧,粟梅,夏立勋,等.基于最优马尔可夫链的双极四脚矩阵变换器随机载波调制策略[J].中国电机工程学报,2009,29(6):8—14.[3]王晓刚,谢运祥,帅定新,等.四桥臂逆变器的快速三维SVPWM算法[J].华南理工大学学报(自然科学版),2009,37(7):94—99.[4]罗国永,曹怀志,曾明高.三维电压空间矢量控制在三相四桥臂逆变器中的应用[J].变流技术与电力牵引,2008(2):21—23.[5]张方华,丁勇,王慧贞,等.四桥臂三相逆变器的特定谐波消除控制[J].中国电机工程学报,2007,27(7):82—87.[6]宦二勇,宋平岗,叶满园.基于三次谐波注入法的三相四桥臂逆变电源[J].电工技术学报,2005,20(12):43—46.[7]王正仕,林金燕,陈辉明,等.不平衡非线性负载下分布式供电逆变器的控制[J].电力系统自动化, 2008,32(1):48—60.[8]王斌,王凤岩.提高重复控制逆变电源的负载瞬态响应特性[J].电源技术应用,2008,13(2):6—9.[9] 武健,何娜,徐殿国.重复控制在并联有源滤波器中的应用[J].中国电机工程学报,2008,28(18):66—72.[10]TOMIZUKA M, KEMPF C.Design of discrete time repetitive controllers with applicati ons to mechanical systems[C]//Proceedings of 11th IFAC Triennial World Congress.Tallinn, 1990:243—248.[11]TZOU Y Y,OU R S,JUNG S L,et al. High-performance programmable AC power source with low harmonic distortion using DSP-based repetitive control technique[J].IEEE transactions on power electronics,1997,12(4):715—725.[12]郭卫农,陈坚.基于状态观测器的逆变器数字双环控制技术研究[J].中国电机工程学报,2002,22(9):64—68.。
离网条件下的三相四桥臂逆变器控制策略研究

基 波正序 、 负序 和零序分量分解 , 研究分别采用正序、 负序和零序旋 转坐标 系下的电压、 电流双 闭环控制 方法 , 搭建了 以英飞凌 X E 1 6 4 F N单 片机为控制核心的硬 件 实验平 台, 并进行 实验研 究, 实验结 果证 明所 用控制方法的正确性。
关键 词 : 离网; 三相 四桥 臂 逆 变 器 ; 对 称 分 量 法
检测与控制
2 0 1 3 年 第5 期( 第2 6 卷, 总 第1 2 7 期 )・ 机械 研究 与应用 ・
离 网条 件 下 的 三 相 四桥 臂 逆 变 器 控 制策 略研 究
李章 清 , 丁 军怀 , 刘成 洋
( 1 . 兰州长城 电X -  ̄4 #有 限公 司, 甘肃 兰州 7 3 0 0 0 0;2 . 天水电气传动研 究所有限责任公司, 甘肃 天水 7 4 1 0 2 0 3 . 天水长城 开关厂有 限公 司, 甘肃 兰州 7 4 1 0 2 0 )
L I Z h a n g — q i n g , D I N G j u n — h u a i ,L I U C h e n g — y a n g
( . L a n z h o u G r e a t w a l l E l e c t r a i c a l C o . , L t d , L a n z h o u G a n s u 7 3 0 0 0 0, C h i n a ;
3 . T i a n g s h u i G r e a t w a l l S w i t c h g e a r o. C , L t d ,T i a n s h u i G a su n 7 4 1 0 2 0, C h i n a )
Ab s t r a c t :A t h r e e - p h a s e f o u r - l e g i n v e r t e r i s d e s i g n e d t o a d a p t t h e u n b a l a n c e l o a d s i n t h e mi c r o g r i d .I t s ma t h e ma t i c a l mo d e l s a r e r e a l i z e d o n t h e a - b -e s t a t i o n a r y f r a me a n d d - q s y n c h r o n o u s r o t a t i o n r e f e r e n c e f r a me r e s p e c t i v e l y,t h e s y mme t r i c a l c o mp o — n e n t me t h o d i s u s e d t o a b s t r a c t t h e f u n d a me n t a l — f r e q u e n c y p o s i t i v e s e q u e n c e, z e r o s e q u e n c e a n d n e g a t i v e s e q u e n c e f o r t h e r e — l a t e d v o l t a g e s a n d c u r r e n t s , t h e o u t e r v o l t a g e l o o p a n d i n n e r c u r r e n t l o o p a r e s t u d i e d b a s e d o n t h e s e q u e n c e c o mp o n e n t s o n t h e d - q s y n c h r o n o u s r o t a t i o n r e f e r e n c e f r a me ,a p r o t o t y p e i n t h e c o r e o f XE1 6 4 F N i s e s t a b l i s h e d .T h e e x p e r i me n t s a r e d o n e a n d
三相四桥臂逆变器的工作原理分析与控制
三相四桥臂逆变器的工作原理分析与控制-CAL-FENGHAL-(YICAI)-Company One 1三相四桥臂逆变器的工作原理分析与控制在传统的三相全桥逆变爲的娠础上埔加•个桥VF 构成的-M 桥轉逆变器町以产生三个砂 立的输出电压。
通过所熠加的第四桥苗产生一个自山度來控制屮件亢电用•可以便逆变JIH 具仃W 不平衡负载的能丿几木改对采用正咳脉宽调制技术OPWM)的三相半桥逆变器和-相四桥轉 逆变器进行了分析比较•重点分析了正弛波调制和三次淸波注入的PVIM 控制的三楣四桥關逆 变盎工作原理•并进行了仿宜比较。
21三相半桥逆变器的工作原理分析2L1三相半桥逆变器输出纹波分析半逆变器的开关频率远犬丁•输出频申时.逆变器输山电尺上喪包含调制频率及典済波、开 关频率及其谐液的边频帶I M Q 心SPWM 逆变器屮TT 咲频率远人丁输山频率.因此打次済波群远离基波-经过滤液JB 谐液須到了抑制.逆变器输出璀木上只剩卜・^5波电压°木节利用平均侑 模羽何•将输出电rR/i :->b 开关周期内的平均值近似为输出电爪堪波分蛍的瞬时値來分析电感 电流和输出电压上的纹泼S用2丄所示为-棚半桥逆变器主电路图「询半桥逆变器毎相的工作方成勺单相半桥祁同. Jfl —+11的电路結构图如国2.2所示,化一个开关周期内订; |.0<f<d(f)7:JF一卒开关周期内输出电压的平均値为:□ 〉-护JL 中• d(b = yP +»JsinSE] • m 为调制比•取 MJ = 1 •则输Hl 电JE 为:c-乙J3■£' s阳2・2甲柑半桥逆变器V,G 心心=n 0 □圏2丄三相丫桥逆变湍主电路 QB图2 3输出电压U,⑦和电感电流g ⑦变化曲线图23示出了输出电压纯(F)和电感电流纹波山丄①的变化曲线•町以frill.输出电爪过零 处电感I:的电流纹波址大.址大电感电流纹波为:B 叽=AfL输出滤溅电容充电的平均电流为:A «-<=T电容在T /2时何间隔内充电M 】・所以输出电爪纹波为:3 (f)«生 L “ C 2 P1L2三相半桥逆变器输入电容电压纹波分析逆变器的间级为DC/DC 变换器时.逆变器的输入端电容的的电流可认为是•氏流Sb逆变器的输入电容承担功率解IS 的功能何,在三相半桥逆变器中・输入电容还具仃抑制中虑电 位偏移的作用。
三相电流型逆变电路工作原理_概述说明以及解释
三相电流型逆变电路工作原理概述说明以及解释1. 引言1.1 概述本文将介绍三相电流型逆变电路的工作原理,以及对其进行概述、说明和解释。
三相电流型逆变电路是一种重要的电能转换装置,广泛应用于各个领域,如工业控制系统、交流驱动电机等。
了解该电路的工作原理对于深入理解和应用该技术具有重要意义。
1.2 文章结构本文按照以下结构展开对三相电流型逆变电路的讨论:第2部分将详细介绍三相电流型逆变器的概述,包括其基本定义、特点和应用领域。
接着在第3部分,我们将深入探讨三相电流型逆变电路的组成,包括硅调制整流桥、滤波器和PWM逆变输出端等重要部分。
然后在第4部分中,我们将详细解析三相电流型逆变电路的工作原理,包括各个元件的功能和协同作用机制。
第5部分将关注实验设计与步骤,并给出实验结果与分析。
同时还会介绍该技术在实际应用中的场景案例及其分析。
接下来,在第6部分我们将对该电路的效能及限制进行评估,包括方法、指标选择以及与其他实验进行的对比和数据分析。
最后,在第7部分中,我们将总结文章并对三相电流型逆变电路未来的优化和扩展方向进行展望。
1.3 目的本文旨在提供一个全面详细的概述,并深入解释三相电流型逆变电路工作原理。
通过阐述其组成部分、功能机制以及实验结果与应用案例,读者可以更好地理解和应用这一技术。
同时,本文还将评估该技术的效能和限制,为未来的研究提供参考。
通过本文的阅读,读者将能够全面了解三相电流型逆变电路,并有助于相关领域工程师和研究人员进一步探索该技术在实际中的创新应用。
2. 三相电流型逆变电路工作原理:2.1 三相电流型逆变器概述:三相电流型逆变器是一种用于将直流电转换为交流电的电路装置。
它通过控制和调节输入直流电压,实现输出交流电压的波形控制和频率调节。
与传统的单相逆变器相比,三相电流型逆变器具有更高的功率输出和更稳定可靠的性能。
2.2 三相电流型逆变电路组成:三相电流型逆变电路由多个组件组成,包括整流单元、滤波单元以及逆变单元。
三相pwm逆变器工作原理

三相pwm逆变器工作原理
三相PWM逆变器是一种将直流电源变换为三相交流电源的电子装置。
它采用了PWM(脉宽调制)技术来控制输出的电压和频率。
工作原理如下:
1. 输入直流电源通过整流电路进行滤波,将直流电源转换为稳定的直流电压。
2. 控制电路根据输入的控制信号,通过三相桥臂中的IGBT (绝缘栅双极型晶体管)或MOSFET(金属氧化物半导体场效应晶体管)开关元件来控制电流的流向和大小。
3. 控制电路根据输入的控制信号生成PWM信号,将其发送给三相桥臂中的开关元件,以控制每个开关元件的导通时间和断开时间。
4. 通过不同的PWM信号控制方式,可以调整输出电压的幅值和频率。
一般情况下,采用空间矢量调制(SVPWM)方式,将三相PWM信号转换成一个类似正弦波的输出电压。
5. 输出的交流电压通过滤波电路平滑处理,得到稳定的三相交流电源。
三相PWM逆变器的工作原理可以通过调节控制信号的幅值和频率,实现对输出电压的精确控制。
它在工业应用中广泛应用于变频调速、电力传输和分布式发电等领域。
三相逆变器工作原理及控制
出电压。
正常工作过程
正常工作
当三相逆变器正常工作时,控制电路根据负载需求和运行模式,实 时调整各桥臂的导通状态,以输出满足要求的交流电压。
负载需求
根据负载的实际需求,控制电路调整各桥臂的导通状态,以输出满 足要求的交流电压。
运行模式
根据不同的运行模式(如电压模式、电流模式等),控制电路调整各 桥臂的导通状态,以实现不同的控制目标。
船舶电力推进
为船舶提供动力,具有 高效、环保和节能的优 点。
列车电力推进
为列车提供动力,具有 加速快、运行平稳和节 能的优点。
无人机电力推进
为无人机提供动力,具 有高效、灵活和环保的 优点。
在电机控制系统中的应用
电机驱动控制
01
通过逆变器来控制电机的启动、停止、调速和方向等。
电机保护控制
02
通过逆变器来监测电机的运行状态,实现过载、短路等保护功
停机过程
停机
当需要停机时,控制电路会按照设定的停机模式,逐一关闭各桥 臂的开关,使三相逆变器逐步退出工作状态。
逐一关闭
控制电路按照设定的停机模式,逐一关闭各桥臂的开关。
逐步退出
在停机过程中,三相逆变器的输出电压逐渐减小至零,最终完全 退 Nhomakorabea工作状态。
04
三相逆变器的控制策略
电压控制策略
总结词
通过控制逆变器的输出电压,实现对输出电压的幅值、频率和相位进行调节。
模块化
模块化设计能够提高三相逆变器的可维护性和可扩展性, 方便实现分布式电源系统和微电网的集成应用。
面临的挑战
可靠性问题
由于三相逆变器在电力系统中承担着重要的角色,其可靠性问题一直是研究的重点和难点 ,如何提高逆变器的可靠性和稳定性是当前面临的重要挑战。
三相四桥臂逆变器的控制策略研究
毕业设计(论文)三相四桥臂逆变器的控制策略研究完成日期2011年12月19日论文题目:三相四桥臂逆变器的控制策略研究专业:电气工程及其自动化本科生:(签名)指导教师:(签名)摘要为了适应平衡或不平衡负载、线性或非线性负载的要求,三相四桥臂逆变器是针对解决三相不平衡负载而提出的一种新型拓扑。
这种拓扑最大的优点是在三相负载不平衡时保持三相输出电压的对称输出,而且和其他三相四线制逆变器相比,系统的体积和重量又比较小。
首先,本文介绍了三相四桥臂逆变器的发展概况和一些比较常见的拓扑构,同时还介绍了几种三相四桥臂逆变器的调制策略。
其次,本文通过建立四桥臂三相逆变器的数学模型,由数学模型可以得到四桥臂三相逆变器中输出电压和电感电流等各个变量之间的关系,从而实现对输出电压的控制。
最后,三相四桥臂的控制策略主要有不对称分量法,滞环电流控制,空间矢量控制,PWM控制。
电流滞环控制的硬件电路设计简单,但存在开关频率不固定,输出滤波器设计困难,输出波形质量差,空间矢量控制(SVM)技术具有较高的电压利用率,且通过对零矢量的合理控制可以降低谐波含量或降低开关损耗,因此是一种较好的控制方法。
为了消除输出相电压的静态误差,本文讨论了一种基于PI调节器改进的电压调节方案。
同时,空间矢量控制也可以应用到三相四桥臂逆变器中。
此方法具有提高电压利用率,降低总谐波失真,减小开关频率的特点,并且实现简单。
通过MATLAB仿真软件对上述的控制系统进行了仿真验证,结果证明了控制方案的有效。
关键词:三相四桥臂逆变器;电流滞环;三维SVM控制Subject: Control Strategy of Three-Phase Four-leg Inverter Specialty: Electrical Engineering and AutomationName: Jia Honghua (Signature)Instructor: Zhang Yufeng (Signature)AbstractIn order to adapt to the balance or not balance the load, linear or nonlinear load demand, three phase four bridge arm inverter is solve the unbalanced three-phase load and put forward a new type of topology. This topology is the biggest advantages in three-phase load balance not keep three-phase output voltage of symmetry output, and and other three-phase four wire inverter, compared the bulk and weight of the system and smaller.First, this paper introduces the three phase four bridge arm inverter the development situation and some of the more common topology structure, and also introduces several three-phase four bridge arm inverter modulation of the strategy.Secondly, this paper establish four bridge three-phase inverter arm of the mathematical model, the model can get four bridge three-phase inverter arm of the output voltage and current, inductance of the relationship between the different variables, so it can realize the output voltage control.Finally, three phase four arms of the bridge to the asymmetric control strategy of main component method, hysteresis current control, the space vector control, PWM control. Current hysteresis control hardware circuit design is simple, but the existing switching frequency is not fixed, output filter design difficulties, poor quality of output waveform, the space vector control (SVM) technology has high voltage utilization, and through to the zero vector can reduce the reasonable control of the harmonic content or reduce switch loss, so is a better control method. In order to eliminate the phase voltage output static error, this paper discusses the PI adjuster based on improved voltage regulation scheme.In the meantime, the space vector control can also be applied to three phase four bridge arm inverter. This method is raising voltage utilization rate, reduce the total harmonic distortion, reducing switch frequency, and the characteristic of implementation is simple. MATLAB simulation software of the above through the control system is simulated, and the results proved effective control scheme.Keyword:four-leg three-phase inverter ;hysteresis current control;three-dimensional SVM control目录第1章绪论 (1)1.1课题背景 (1)1.2 本文的主要研究内容 (2)第2章三相四桥臂逆变器的发展概况 (3)2.1 三相四线逆变器的拓扑 (4)2.2 三相四桥臂逆变器调制策略概况 (7)2.2.1对称分量法 (7)2.2.2 电流滞环控制 (8)2.2.3 PWM控制 (8)2.2.4 二维空间矢量控制 (9)2.2.5 三维空间矢量调制 (9)2.2.6 基于载波的谐波注入调制 (9)2.3本章小结 (10)第3章三相逆变器的数学模型 (11)3.1在ABC静止坐标系中建立三相三桥逆变器的数学模型 (11)3.2 在ABC静止坐标系中建立三相四桥臂逆变器的数学模型[19] (15)3.3 三相四桥逆变器在dqo旋转坐标系中的数学模型 (16)3.4本章小结 (18)第4章三相四桥逆变器的空间矢量调制方案 (19)4.1空间矢量调制概述 (19)4.2空间合成矢量运动轨迹的确定 (20)4.3空间矢量分析 (25)4.4三维空间开关矢量 (26)4.5三维空间矢量调制控制方案 (29)4.5.1 MA TLAB简介 (29)4.5.2 使用滞后比较器的瞬时空间电流相量控制法 (30)4.5.3 简化的双环三态电流滞环电压调节器 (32)4.6仿真试验实现与结果 (34)4.6.1 双环三态电流滞环电压调节仿真 (34)4.6.2 简化双环三态电流滞环电压调节仿真 (42)4.7本章小结 (44)第5章全文总结与展望 (45)5.1全文总结 (45)5.2全文展望 (45)参考文献 (46)致谢 (48)第1章绪论随着社会工业的发展,当今社会对电力供电质量与安全可靠性要求越来约高对交流输入电源的稳压精度也要求越来越高。
三相四桥臂逆变器的设计与解耦控制
分类号密级U D C学 位 论 文三相四桥臂逆变器的设计与解耦控制作者姓名:王狄指导教师:张化光教授副导师:陈宏志讲师申请学位级别:硕士学科类别:工学学科专业名称:电力电子与电力传动论文提交日期:2008年2月22日论文答辩日期:2008年2月26日学位授予日期:答辩委员会主席:评阅人:东北大学2008 年2月A Thesis for the Degree of Master in Power Electronics and Electric DrivesDesign and Decoupling Control Strategy of theThree-phase Four-leg InverterBy Wang DiSupervisor : Professor Zhang HuaguangNortheastern UniversityFebruary 2008独创声明本人声明所呈交的学位论文是在导师的指导下完成的。
论文中取得的研究成果除加以标注和致谢的地方外,不包含其他人已经发表或撰写过的研究成果,也不包括本人为获得其他学位而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示诚挚的谢意。
学位论文作者签名:签字日期:学位论文版权使用授权书本学位论文作者和指导教师完全了解东北大学有关保留、使用学位论文的规定:即学校有权保留并向国家有关部门或机构送交论文的复印件和磁盘,允许论文被查阅和借阅。
本人同意东北大学可以将学位论文的全部或部分内容编入有关数据库进行检索、交流。
(如作者和导师同意网上交流,请在下方签名:否则视为不同意)学位论文作者签名:导师签名:签字日期:签字日期:东北大学硕士学位论文摘要三相四桥臂逆变器的设计与解耦控制摘要分布式能源是世界能源发展的最新方向,也是与信息时代相伴而生的互联网式的能源系统。
以微型燃气轮机为动力的发电机组,同时配以电力变换装置的微型供电系统,成为分布式能源重点。
三相逆变器的工作原理

三相逆变器的工作原理
三相逆变器是一种将直流电能转换为交流电能的装置,它在工
业生产和电力系统中起着非常重要的作用。
那么,三相逆变器的工
作原理是怎样的呢?接下来我们将详细介绍它的工作原理。
首先,三相逆变器由六个功率晶体管和六个二极管组成,这些
器件按照特定的方式连接在一起,形成一个桥式逆变电路。
在工作时,直流电源首先经过滤波电路进行滤波处理,然后输入到逆变电
路中。
逆变电路通过适当的控制方式,可以将直流电能转换为交流
电能,并输出到负载端。
其次,三相逆变器通过控制功率晶体管的导通和关断,实现对
输出电压的调节。
在正半周周期内,三相逆变器通过控制三个功率
晶体管的导通和关断,可以将直流电源转换为交流电源,并输出到
负载端。
在负半周周期内,通过控制另外三个功率晶体管的导通和
关断,同样可以实现交流电源的输出。
通过这种方式,三相逆变器
可以实现对输出电压的调节和控制。
最后,三相逆变器的工作原理还与PWM调制技术密切相关。
PWM
调制技术是一种通过改变脉冲宽度的方式,实现对输出电压的调节。
在三相逆变器中,PWM调制技术可以通过改变功率晶体管的导通时间和关断时间,实现对输出电压的精确调节。
这种调制技术不仅可以提高逆变器的输出电压质量,还可以降低谐波含量,减小对负载的干扰。
综上所述,三相逆变器通过桥式逆变电路、功率晶体管的控制和PWM调制技术,实现了将直流电能转换为交流电能的功能。
它在工业生产和电力系统中具有重要作用,可以满足各种负载对电能的需求。
希望通过本文的介绍,读者对三相逆变器的工作原理有了更深入的了解。
三相四桥臂逆变器的复合控制
三相四桥臂逆变器的复合控制闫风;黄丽华;王辉;澹台潇涵;韩姣;于伟【摘要】In the application of wind,solar and other clean energy in the grid,inverter is indispensable.Harmonic wave and unbalanced load affect the output of the inverter,the performance of the inverter control strategy directly affects the power quality.By combining proportional integral (PI),vector resonance (VR) control and repetitive control (RC),the compound control method is proposed.PI restrain the interference of DC component,the VR controller suppresses the low harmonics.RC suppresses the higher harmonics and reduce the static error,and improve the waveform qualities of converter output voltage and current.The simulation results verify the effectiveness of the proposed control method.%随着风能、太阳能等清洁能源在电网中的应用,逆变器不可或缺.电网中的谐波和不平衡负载影响电网的电能质量,因此逆变器的控制策略及控制方法尤为重要.为提高电能质量,以三相四桥臂逆变器为模型,提出了比例积分PI、矢量谐振(vector resonant,VR)控制和重复(repetitive control,RC)控制相结合的复合控制方法.其中比例积分控制器能够抑制直流分量的干扰;矢量谐振控制器能够抑制特定频率且含量较高的谐波;重复控制器抑制多次且含量较低的谐波并减小稳态误差.仿真结果验证了所提控制方法能有效提高逆变器输出电压电流波形质量.【期刊名称】《河北大学学报(自然科学版)》【年(卷),期】2018(038)001【总页数】8页(P105-112)【关键词】逆变器;矢量谐振;重复控制;谐波【作者】闫风;黄丽华;王辉;澹台潇涵;韩姣;于伟【作者单位】河北农业大学机电工程学院,河北保定071000;河北农业大学机电工程学院,河北保定071000;天津天大求实电力新技术股份有限公司,天津 300384;国网河北省电力公司保定供电分公司营业及电费室,河北保定071000;国网河北省电力公司保定供电分公司营业及电费室,河北保定071000;北京南瑞电研华源电力技术有限公司,北京 102200【正文语种】中文【中图分类】TM464随着电力电子技术的发展,分布式发电系统、不平衡负载及非线性负载并入微电网,造成微电网系统涌入了大量的谐波和不平衡电流,影响电网安全运行.三相四桥臂逆变器具有带不平衡负载[1]的能力,通过合适的控制方法,可以改善电流和电压的波形质量.常用的PI控制方法具有算法简单和可靠性高的优点,但对交流量控制效果较差,PI控制对正弦信号存在稳态误差,会增大逆变电压电流畸变率.谐振控制[2-4]方法可实现对交流量在特定频率处正负序信号的无静差控制.为提高控制精度,在特定频率处引入VR控制器.在充分考虑被控制对象后,比例积分矢量谐振(PIVR)控制方法能很好地跟踪交流分量,具有在特定频率处达到幅值0和相位0的优点.但PIVR 只能作用于单一频率处,当需要消除多次谐波影响时,只能通过增加矢量谐振控制器的数量,出现控制系统复杂不利于闭环控制的响应问题,所以引入重复控制[5-7]方法,但该方法响应速度慢,不适合单独使用.文献[8-10]采用PI控制、谐振控制和重复控制的俩俩组合控制方法,但仍然存在着不能同时控制直流分量和谐波分量的问题.本文提出采用比例积分矢量谐振控制和重复控制相结合的复合控制方法,应用到三相四桥臂逆变器的电流环[11]控制中,能抑制直流分量的干扰,同时对多个交流信号有效调节并抑制周期性干扰,提高逆变器输出波形质量,具有较好的稳定性.通过仿真和实验得到电流和电压波形图,验证控制策略的正确性和有效性.1 数学模型的建立三相逆变器通过增加第四桥臂控制中性点电压,产生三相独立电压,具有带不平衡负载的能力.在不平衡负载及谐波电网下,逆变器采用电压外环和电流内环的双闭环控制方法.逆变器并网电流的质量影响电压质量及电能质量,因此研究电流环的控制方法十分重要.三相四桥臂逆变器的拓扑结构如图1所示,主要由电源、三相逆变电路以及滤波器构成.Ug为直流电源,L为滤波电感,C为滤波电容,Z负载理抗,ia、ib、ic 为输入滤波器的电流,in为中性线补偿电流,uca、ucb、ucc为输出电压.图1 三相四桥臂逆变器的拓扑图Fig.1 Three-phase four-leg inverter topolo 以输出电压矢量uc,电流矢量i,负载电压矢量u,电流矢量i1为状态量,用开关周期平均法对逆变器建模为C(duc/dt)=i-i1,(1)(2)将abc静止坐标系下的量变换到αβ0坐标系下,i1α、i1β,i10为负载电流矢量i1在αβ0坐标系下的各分量,iα、iβ、i0为输出电流矢量i在αβ0坐标系下的各分量,uα、uβ、u0为负载电压矢量u在αβ0坐标系下的各分量,ucα、ucβ、uc0为输出电压uc在αβ0坐标系下的各分量.(3)(4)(5)(6)当三相负载为平衡负载时,输出量不存在零序和负序分量,在三相三线逆变器中电流环采用基于同步旋转坐标系下的PI控制器即可取得良好的控制效果.不平衡负载下的逆变器输出量存在零序和负序分量,经过多次坐标变换后采用PI控制器还不能获得良好的波形质量而且计算复杂.为更好地跟踪交流信号和抑制谐波分量的干扰,对电流控制方法进行改进设计.根据图1的逆变器拓扑图建立电流环控制框图,如图2所示.被控制对象选择结构简单的感性负载在频域下的传递函数为Gp(s)=Ls+R.图2 电流控制框图Fig.2 Block diagram of current control2 包含比例积分的矢量谐振控制器为实现对正弦电流无静差跟踪的同时又能抑制直流分量和谐波的干扰,将电流环控制方法改进为PIVR,其传递函数如式(7)所示.Kp为比例参数;Ki为积分参数;KVR为矢量谐振参数;ωc决定控制器的带宽;hω0为谐振频率;R为负载等效电阻;L为等效电感.(7)为满足零极点相消,令根据传递函数式(7),得到PIVR控制器在谐振频率处的相位响应为(8)(9)图3是PIVR控制方法在matlab下得到的波特图.其Kp=1,Ki=1,ωc=20rad/s,ω0=600 πrad/s,KVR=1,Kir=157.由图3可以看出,采用该控制方法后,在低频处的幅值增益接近0和相位响应接近0即对直流量产生较大的增益,可有效控制直流分量.在特定频率300 Hz处产生接近40 dB增益.图3 PIVR控制器的波特图Fig.3 Bode plot of PIVR controller充分考虑被控制对象Gp,当负载为感性负载时,通过闭环传递函数波特图观察幅频和相频特性.采用PIVR控制器的闭环传递函数及其特性如式(10-11):(10)(11)由于ωc≪ω0,Ki≪ω0,式(11)可化简为(12)由于被控对象本身的电感,电阻取值较小,可认为式(12)中的两项分子、分母分别近似相等,因此采用PIVR控制器的电流闭环传递函数理论上在特定频率处的相位响应接近0.图4为闭环传递函数的幅频和相频特性,PIVR控制器可确保在特定频率点处的幅值增益接近0和相位响应接近0.图4 PIVR控制器电流闭环传递函数的波特图Fig.4 Bode plot of current closed-loop transfer functionPIVR控制对单一谐波跟踪效果良好,当需要同时处理多次谐波时,需要通过增加谐振控制器的数量,导致运算复杂度增加而且不利于系统控制.在实际工程中允许并联的谐振控制器数量有限.为了能够减小运算量和同时处理多次谐波,在谐振控制器的基础上引入重复控制.3 重复控制器的设计基于内膜原理的理想重复控制器如式(13)所示,在实际应用中,由于延时环节的存在很难通过模拟电路实现重复控制,只能通过离散实现数字控制,离散域下数学模型如式(14),其内膜系数为单位增益正反馈.为增加系统的稳态性,引入衰减系数Q如式(15)对重复控制进行改进.(13)(14)(15)根据数学指数函数的性质[12],由式(15)得(16)式(16)中包含了一系列的谐振之和,相当于多个谐振控制器并联,因此理论上可以消除多次谐波分量的影响并且无静差跟踪各个谐波频率点处的正弦信号.引入衰减系数Q后的重复控制器的幅频相频特性如图5所示.图5 重复控制器的波特图Fig.5 Bode plot of repetitive control由图5可知重复控制器可以在多个频率处产生幅值增益,但相位滞后,而且随着频率的增加其幅值降低,因此加入补偿环节C(z)如图6所示,对其相位和幅值进行补偿,减小误差.图6 重复控制Fig.6 Block diagram of repetitive control图6中:N为每个周期的采样次数.添加补偿环节后的重复控制器传递函数为(17)其中补偿环节C(z)是引入重复控制器增益系数krc,相位超前环节zk和低通滤波器或小于1.0的常数环节C1(z)3个环节.C(z)=krzkC1(z).(18)4 复合控制方法为了同时抑制多次谐波并减小稳态误差,本文将电流环采用比例积分矢量谐振控制器与重复控制器并联的复合控制方法,其结构如图7所示.电流环采用复合控制方法的传递函数为图7 电流内环复合控制框图Fig.7 Block diagram of compound controller(19)为实现数字化控制,将其传递函数采用双线性变换法离散化,得到其离散表达式为(20)(21)其中B0=(4KVRL+2KVRRTs)/L,B1=-8KVR,B2=(4KVRL-2KVRRTs)/L,A0=4+2ωcTs+(hω0Ts)2,A1=-8-2(hω0)2Ts,A2=4-2ωcTs+(hω0Ts)2.(22)其中,5 仿真结果在Matlab/Simulation中根据图1所示的拓扑图搭建三相四桥臂逆变器的仿真模型,在电压环采用比例积分控制方法的基础上,验证电流环采用本文的复合控制方法的有效性.逆变器系统参数设定如下:直流母线电压为260 V,电网额定相电压为220 V,额定频率为50 Hz,开关频率为10 kHz,滤波电感为0.637 mH,电阻为0.1 Ω,电容为10-5 F.三相负载不平衡时,a相电阻为14 Ω,电感为20 mH,b相电阻为10 Ω,电感为30 mH,c相电阻为20 Ω,电感为20 mH.电流环复合控制方法各参数为:KP=1,Ki=1,ωc=20 rad/s,ω0=600 πrad/s,KVR=1,Kir=157,Q=0.95,N=256.稳态实验波形如图8所示.矢量谐振控制器能实现对交流参考信号的无静差跟踪,但由于电网扰动使输出电流产生畸变.加入重复控制后,波形质量得到很好改善.比例积分矢量谐振控制和复合控制的电流多次谐波分析如图9所示.由图9可知采用复合控制后,多次谐波含量降低.电压电流波形分析如图10所示,采用比例积分矢量谐振控制方法的三相电压输出不平衡,加入复合控制器的电流波形更光滑质量更高,三相电压对称输出且平衡. 图8 a相电流波形实验结果对比Fig.8 Comparison of experimental wave-forms图9 谐波分析对比Fig.9 Comparison of harmonic analysisa:电压波形b:电流波形图10 电压电流波形仿真结果Fig.10 Simulation results of voltage and current waveform6 结论本文提出比例积分矢量谐振控制和重复控制结合的复合控制方法.结合三者的优点,可以同时对直流分量和各种频率的谐波分量实现快速抑制,能无静差跟踪且减小误差,使系统具有良好的稳态性和动态性.仿真结果证明采用该控制方法可以有效改善电流波形质量,减小电流对电压的影响,保证三相四桥臂逆变器在不平衡负载及谐波影响下输出三相平衡对称分量.参考文献:[1] 韦徵,茹心芹,石伟,等.适用于不平衡负载工况下的微网逆变器控制策略[J].电力系统自动化,2016,40(20):76-82.DOI:10.7500/AEPS20151028004.[2] 贺益康,徐海亮.双馈风电机组电网适应性问题及其谐振控制解决方案[J].中国电机工程学报,2014,34(29):5188-5203.DOI:10.13334/j.0258-8013.seep.2014.29.021.[3] 徐海亮.双馈风电变流器的谐振控制技术研究[D].杭州:浙江大学,2014.XU H L.Investigation on resonant control technologies of dfig-based wind power converters[D].Hangzhou:Zhejiang Unversity,2014.[4] 全相军,窦晓波,龙昌明,等.逆变器电压复变量谐振优化控制[J].中国电机工程学报,2016,36(15):4214-4224.DOI:10.13334/j.0258-8013.seep.160277.QUAN X J,DOU X B,LONG C M,et al.Optimal design for inverts based on complex variable resonant controllers[J].Proceedings of theCSEE,2016,36(15):4214-4224.DOI:10.13334/j.0258-8013.pcsee.160277.[5] S KARYS.Advanced control and design methods of the auxiliary resonant commutated pole inverter[J].Bulletin of the Polish Academy of Sciences Technical Sciences,2015,63(2):489-494.DOI:10.1515/bpasts-2015-0056.[6] 粟梅,王辉,孙尧,等.基于改进重复控制器的三相四线逆变器设计[J].中国电机工程学报,2010,30(24):29-35.DOI:10.13334/j.0258-8013.seep.2010.24.017.SU M,WANG H,SUN Y,et al.Design of three-phase four-leg inverter based on modified repetitive controller[J].Proceedings of theCSEE,2010,30(24):29-35.DOI:10.13334/j.0258-8013.pcsee.2010.24.017. [7] 曹以龙,杨敏杰,江友华,等.基于重复原理的无差拍控制单相逆变器[J].电气传动,2014(09):54-59.[8] 石存玮.逆变器的三相不平衡负载控制方法研究[D].重庆:西南交通大学,2014. SHI C W.Research on the control method of three-phase inverter under unbalanced loads[D].Chongqing:Southwest Jiaotong Unversity,2014. [9] 陈思哲,章云,吴捷.不平衡电网电压下双馈风力发电系统的比例-积分-谐振并网控制[J].电网技术,2012,36(08):62-68.DOI:10.13335/j.1000-3673.pst.2012.08.018.CHEN S Z,ZHANG Y,WU J.Proportional-Integral-Resonant Grid-Connection Control for Doubly-Fed Wind Power Generation System Under Unbalanced Grid Voltage[J].Power System Technology,2012,36(08):62-68.DOI:10.13335/j.1000-3673.pst.2012.08.018.[10] 杨苹,郑远辉,徐志荣,等.基于准比例谐振积分与重复控制的光伏并网逆变器研究[J].可再生能源,2015,33(7):993-998.DOI:10.13941/ki.21-1469/tk.2015.07.006[11] 郝鹏.三相并网逆变器电流控制技术研究[D].天津:天津大学,2014.HAO P .The research of three-phase grid inverter current control technology[D].Tianjin:Tianjin University,2013.[12] 竺明哲,叶永强,赵强松,等.抗电网频率波动的重复控制参数设计方法[J].中国电机工程学报,2016,36(14):3857-3867.DOI:10.13334/j.0258-8013.pcsee.151163.ZHU M Z,YE Y Q,ZHAO Q S,et al.A design method of repetitive controller against variation of grid frequency[J].Proceedings of theCSEE,2016,36(14):3857-3867.DOI:10.13334/j.0258-8013.pcsee.151163.。
不平衡负载条件下三相四桥臂逆变器的控制
不平衡负载条件下三相四桥臂逆变器的控制费兰玲;张凯;蔡院玲【摘要】三相四桥臂逆变器具备外接三相不平衡负载的能力.为改善逆变器系统在严重不平衡负载情况下输出电压的对称性,文中提出一种新颖的控制策略--旋转坐标系下的PIR-P双环控制.当系统接不平衡负栽时,电压外环的PI控制器保证系统的动态性能,谐振控制器保证其稳态精度.最后在旋转坐标系下对系统分别采用PI-P和PIR-P两种双闭环控制器情形作对比仿真.结果表明系统在严重不平衡负载情况下,输出电压负序不平衡度由2.41%减小到0.129%,零序不平衡度由2.25%减小到0.032%.【期刊名称】《通信电源技术》【年(卷),期】2011(028)003【总页数】6页(P4-8,13)【关键词】三相四桥臂逆变器;不平衡负载;谐振控制【作者】费兰玲;张凯;蔡院玲【作者单位】华中科技大学电气与电子工程学院,湖北,武汉,430074;华中科技大学电气与电子工程学院,湖北,武汉,430074;华中科技大学电气与电子工程学院,湖北,武汉,430074【正文语种】中文【中图分类】TM4641 概述基于三相四线制逆变器拓扑结构,提出的三相四桥臂逆变器(four-leg inverter,FLI)广泛应用于功率变换和UPS等场合。
它具有直流母线电压低,开关损耗小,可以接非线性及不平衡负载等优点。
较之于传统的三相三桥臂逆变器,三相四桥臂逆变器通过添加第四条桥臂为非线性及不平衡负载零序电流提供通路,保证逆变器在各种恶劣负载条件下,仍能给负载端提供三相平衡的正弦电压。
其主电路图如图1所示。
在原有三相三桥臂逆变器拓扑结构上发展而来的三相四桥臂逆变器,增加了两个开关管(即:两个开关状态),开关状态由原来的2^3增加为2^4。
与传统逆变器相比较,控制方法更加复杂,这在一定程度上局限了三相四桥臂逆变器的应用。
新增加的第四桥臂与其它三相共用,形成三相电流回路,因此对其它三相桥臂开关的触发和输出电流的激励产生牵制作用。
三相四桥臂逆变器电路设计

三相四桥臂逆变器电路的设计慾本性能耍旬输入电JG 300Vb)输出业交流三相四线制,正相库;c)输出电输入电爪在止常范IB内.常温及正常T压条井下『相电伍1廿其它条件下*柑电压112V〜llSVid)不平禽对梱移;◎ 输出频率:额宦输出回率为400Hz・加!率变化范II- 400±4Hz:f)输出功率】输出功率eonovA:g)输出敷帛:在额定工作狀态及功率冈数PF=1时,效帘不低J -?5%;h)负戎功率因数:滯后o.s至o.g超iij :1)谕出*11电爪汝压:波咋戟技:141£。
仁总谐彼含民>4%:晝流井fih-+0.1V:j) 过我施如1和%过栽・连缨工柞20瞄k) 加粘能力;输:H如路时11备2倍短略电碱.连童工柞5秒产品不损坏;D 保护功施*输出过XJ I、保护、输出过久频惺护和过温保护。
4.1主电路的设计4.1 1功率开关管选取三tHPIWff'I'irj,牛桥W^l.5倍过菠时流过功率泮的电流晟大•假设电感上最人电流脉功竝为20%>则流过功率件的电藏址犬俏为:J沁广和叹)= 43蛊7A (41) 第四牛桥皆在一相出现2倍粗路时流过功率管的电诡坯大.此时电流珞大值约为人“ ■咒A・因此四个桥臂的功率开关管均选抒越只IXFKfi4NJ5(]PC5(](]M/64却井联。
4 12输入电容的选择親据第二计f的分析・输入电容的取值范用为:二-总匚<4 2)取連变器的输入电爪波动指标为绘终选逛输入电容为两只100MF/450V的电甞并联,4 13输出池波器设汁逆变器的输出継波器主要用来潼除开关频率及直边频带处的谐波虑分* —个滤波器性能的好坏撻体现在H对谐液的抑休枳啦城以及引起的附如电流应力上的.对谐波抑制能力越好.系陀输出THD屜仏也流应力越人.植逆变器器件撤相牌几效率睛低.系握林枳耳h渊儿所以絨小THD b减小滤波器引起的附厠电*1曲力及其IW住柱是矛曹的.图4.1沟LC .阶低適能波器.SPWM £优圏4」LC滤波器输川作用示意图熬波鶉输出电压对逆变桥输出咧压的传递碉数为:lift 沟:f! : q 味尅”的低V ;|fx + L(a) - 0 >在心驚®,的扃频段・L(&) = -401g*? /仇.听以LC 低通 池波器的低爾圧晟—条堀蠶为0的水平堆.阳频层楚一茶斜率为-40HR 的F [线.由以t 仆折叫以ilHir 影响滤波熾枭的毎数■要址谐掘锁埠化和阳尼比C ■为了能仆熾地 池除斤启硕率业的瞎波成廿•慣卅低额信弓•込押牌掘顼:半£満足以下条件:r z4比中£为输出电爪堆波脚帘・人为开关豹率.4<^ <10 6满足逮条件启•滝谀器的細频 特性曲线石汕咲频黒处以-40血的速度衰碱,而在基破顼申处增曲为0涯魏电感的谨耽证能芍虑到电感上电流纹液的契求,为了在输出跛形廣畳満足要求的曲棍 下尽童綾小遽变器体积,木文血电感也流纹波为他匸电滋邯值的50%,根据&2.即)町以得到谴 波电感的选JUffiHUjt(4(5)结含式(4.5)KJ(4(5) *以及实际实验过穆中的调试和忧化,本文最终选定I-240/xH ・C = 2D pR »为了績小输川滤波器的怖稅重量,设计输川滤波电感时磁芯选用了北京匕星飞疔有限公训 的非晶铁芯*饱-1 5T*输出海破电橹墓本雛数为;厳定输岀功^'F =2000(7. .;1.^ 功卡此==3口toy ,利曲愉卅电 口“15儿 电播上樹卍电沆仃遼侑力J =17一3珈.电感电 流脉功竝广口 X 凤 =12.4,流过电輯的頊大电流为< ….. =43.S7A.电巒址计握常用的方仏也(血圧嗨枳注〉川矚芯⑵」山I 切」儿5蜒苦仃波桩向机貝 的乘积.经验公式为*这是■个凹型二阶拡詡系统.谐振対硕净为曾1^) = 201g|G(»|=-201g式屮.取憊若最人T.作磁密瓦込=叮兀目“山厂 K 为经鑿系数值.单■电^r-0.03.棍弼式(47}得到肿“1.30(泅9・髯个电島选用苗个圣号为FGXX-4fi20的坏增非品铁芯井川.铁芯尺寸拿數如表4.1所示,片有效趙面积24 - 38W .窗口血积人-471cm 2,"”创」>UJcm 4A4.1FGXX-4^20 tV 弄尺 J内從耳(皿) 外汁 D. (ctn)駁 H (an)峨芯:尺寸2.7 4.6 2外闿尺寸2.434.3323(4S)取N ・27匝.则铁芯气陳为旳电感流过最丸唯沆的人j 吋・要确保铁芯不饱和・此时的工作磴產E 应小」他和磴密「逆变器1』倍过栽时电感电流圮大•此时IL x JV x IxlOi"^B= U2 -------- 产 ----- - 1.03T< 1.5T(4,10)取钱祥为1 5mm X )孚找曲根H 绕,电曙的iUf J 系数为4.1.4中幅电廳设计三村四桥臂逆变器中,第四桥臂的输illfl :为中性点.零序电流通过中性点形成冋HU 英了 僅滤波效果更好. 般①中域1加入建波巫感:•引入中域电賭瓦可以械小三村输出注武屯 感电流和小铁电流的谐波侖最和电流肘动亠崔不影响输出电压平衞度和整休滤波建果的胸提下 选操合适的小线电感町减小前二个桥臂滤波器的怵枳和肛竝.(4.7)円)t” x2x 4 xlO'3= 0.1 45t»j (4 9)'"= _____________________________________A 471If-0 20<4.n)曲了简化分析.把输出电压答效対理想的电压源,梵等效电路图如圏42所 示*三村输出电说分别叽、匚、匚・巾统电流为・"-+匚+. 0 VI, = 1, =!,.=£. L x ~kL.山图4 2可剧(4-12)(4 13)ih.•'■.(4 15).ri-j fiii . k.K-'..<i s 色小.n i%y G i me 品技:好、十巾线£也巒:・。