世协行星减速机PGL60-10
60系列行星减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
湖北行星

C6
□C7
C4
Z L8
单位:mm
产品型号 级
PL40 123
PL60 12 3
PL80 123
PL120¹
123
PL160²
123
D1 安装孔分布圆 Φ
34
52
70
100
145
D2
安装螺孔
4×
M4↓6
M5↓8
M6↓10
M10↓20
M12↓24
D3
输出轴径
Φh6
10
14
20
25
40
D4
输出轴肩
Φ
12
17
PL 行星减速机技术参数
产品型号 额定输出扭矩
PL40
5
10
9
5
--
6
6
6
12
12
10.5
Nm
12
10.5
6
7.6
15.5
15.5
7.6
15.5
13.5
15.5
13.5
7.5
故障停止扭矩
Nm
PL60 12.5 28 24 15
9 15.5 15.5 15.5 34.5 34.5 29 34.5 29 17 19 44 44 19 44 38 44 38 22
注:带“*”为次选项速比
PL160 3700 3500
19.0 24.0 29.0
单位 N N
% h
Kg
级数
1级 2级 3级
1级 2级 3级
PL 行星减速机技术参数
产品型号 转动惯量
kgcm2
PL 40 0.031 0.022 0.019 0.017
博美德行星减速机选型手册
目录
公司简介
产品介绍 减速机专用名词解释………………………………………………………………………………………………… 减速机选型…………………………………………………………………………………………………………… 产品型号说明………………………………………………………………………………………………………… 减速机输入端联接方式………………………………………………………………………………………………
Tc2=Tr2 * fs≤Tn
侧倾力矩[Nm]:指轴向力和径向力作用于输出端轴承上径向受力点的力矩。其计算公式为:
轴向力F2AMax[N]:是指平行于轴心的一个力,它平行于输出轴,它的作用点与输出轴端有一定的轴向偏(y2)时,会形 成一个额外的弯挠力矩。轴向力超过样本所示的额定值时,须用联轴节来抵消这种弯挠力 。 [如图所示]
加速扭矩T2B[Nm]:指工作周期每小时少于1000次时允许短时间加载到输出端的最大力矩。工作周期每小时大于1000次时, 须考虑冲击因素。T2B是周期工作制选型时的一个最大值,实际使用 中的加速力矩(T2b)必须小于T2B。否则会缩短减 速机的寿命。
紧急制动扭矩T2NOT[Nm]:指减速机输出端所能加载的最大力矩,这个力矩可在减速机寿命期内加载1000次,绝对不能超 过1000次。(T2NOT=2•T2B)。 空载扭矩TO12[Nm]:指加载到减速机上的以克服齿轮箱内的摩擦力的力矩。 最大扭矩T2max[Nm]:指减速机在静态条件或频繁启动条件下所能承受的输出扭矩,通常指峰值负载或启负载。 实际所需扭矩Tr2[Nm]:所需扭矩取决于应用场合的实际工况,拟选减速机的额定扭矩TN必须大于这个扭矩。 计算用扭矩Tc2[Nm]:会在选择减速机时被用到,可以由实际所需扭矩Tr2和系数fs,按以下公式得出
BUSS混捏机G160减速机锥齿轮齿间隙的调整
3 直 齿 锥 齿 轮 副 齿 顶 隙 的 几 何 关 系
3 1 齿 顶隙 的几何 关 系 .
将 图 1中齿顶 隙部 分局 部放 大 ( 图 2 ,B为 如 )C 齿 轮 2齿 根 线 ,E为齿 轮 1齿 顶 线 , 点 B为 齿 根 F 令 线 与齿 背面 的交点 , 过点 B作 直 线 F 的垂线 , 足 E 垂 为 点 E,IE  ̄ B 为大端 原 有齿顶 隙 。 J 再过 B点 作垂直 于齿 轮 2中心线 的直 线 AB 则 , 调 整齿轮 2使 其 沿 中心 线 向上移 动 时 , , B点 移 至 D 点, AB移 至 C D位置 。过 D点作 平 行 于 F E的直 线 交B E于点 N, B 则 N为 顶 隙 调 整 量 , E为调 整 后 的 N
第3 3卷第 1 期
21 0 1年 2月
甘
肃
冶
金
Vo . NO. 133 1
GANSU M ETALLURGY
F b 2 1 e ., 0 1
文 章编 号 :6ຫໍສະໝຸດ 4 6 (0 10 -130 17 -4 1 2 1 ) 1 0 -3 0
BS U S混 捏 机 G 10减 速 机 锥 齿 轮 齿 间 隙 的 调 整 6
锥齿 轮副 啮合模 型 ( 图 1 。 如 )
产 的主要 设备 , 运 转 负 荷 大 , 动精 度 高 , 键 在 其 传 关
于 G10减速 机 内部 的锥 齿 轮传 动 系统 能 否可 靠 运 6
行 。在生 产实 践 中 , 由于齿轮 副齿 面磨 损程度 不 同 、 支撑 轴承 间隙 变大 等 原 因 , 得 锥齿 轮 啮合 特性 发 使 生变 化 , 隙 、 隙及 压 力 角 随之 改 变 , 但 引起 瞬 侧 顶 不 问冲击 、 动平稳 性 差 , 传 而且对 于传 动精 度要求 较高 的该减 速机 来说 , 出轴 输 出运 动 的螺 旋 线轨 迹 无 输 法 保证 。因此 , 时 调 整 锥 齿 轮副 啮 合 问 隙 至关 重 适 要 , 由于该 减速 机 机 体 庞 大 , 构 复杂 , 整 作 业 但 结 调
PLF系列行星减速机手册
_______________________________________________________________________________ PLF系列行星减速机选型手册地址:深圳市宝安区留仙三路鸿威工业区A栋2楼电话:*************26502268传真:*************E-mail:*******************Http: //前言本手册的所有内容,著作财产权归深圳市杰美康机电有限公司所有,未经深圳市杰美康机电有限公司许可,任何单位或个人不得随意仿制、拷贝、撰抄。
本手册无任何形式的担保、立场表达或其它暗示。
如有本手册所提到的产品的信息,所引起的直接或间接的资料流出,导致利益损失后果,深圳市杰美康机电有限公司与所属员工不承担任何责任。
除此以外,本手册提到的产品及其资料仅供参考,内容如有更新,恕不另行通知。
版权所有,不得翻印。
深圳市杰美康机电有限公司PLF系列行星减速机一.PLF系列特点1.型号60-142 传动比3-100;2.精度5-10 arcmin;3.经济、可靠、方法兰输出。
二.PLF系列标记说明三.结构图四.PLF系列行星减速机技术参数PLF系列行星减速机技术参数五. PLF系列行星减速机标准尺寸1.PLF60系列2.PLF80系列5.PLF142系列六. 减速机选型选用减速机应考虑其结构类型、安装形式、承载能力、输出转速、工作条件等因素。
本书中所列出的减速机的承载能力,是在额定转速下,每天工作 10 小时,每小时启动数少于 10 次,平稳无冲击的条件下得出的。
当实际的工况与上述条件不相符时,需要计算实际需要的承载能力,以准确地选出适合自身需求的减速机。
选型的步骤如下:(一)常规选型1) 确定使用系数(s f )请根据负载类型、每小时启停次数和预期工作寿命从下表中选择出正确的使用系数(s f )2) 求计算用扭矩(Tc2)请根据所需扭矩 2T r 求出计算用扭矩2c T ,计算公式为s f ⨯=r2c2T T 。
行星摆线针轮减速机原理图
行星摆线针轮减速机原理图、结构、参数、性能及型号表示法(淄博电动滚筒)文章标签:行星摆线针轮减速机蜗轮蜗杆减速机摆线针轮减速机减速机行星摆线针轮减速机原理图、结构、参数、性能及型号表示法一、行星摆线针轮减速机/摆线减速机是一种比较新型的传动机构,其独特的平稳结构在许多情况下可替代普通圆柱齿轮减速机及蜗轮蜗杆减速机,因为摆线针轮减速机具有:1、传动比大:摆线针轮减速机一级减速时传动比为1:7到1:87;两级减速时转动比为121~7569,用户也可以根据自己的实际需要选用减速比更大的三级减速!2、传动效率高:摆线针轮减速机由于该机啮合部位采用了滚动啮合,一般效率为可达90%以上。
3、保养方便(潤滑方式):#6125以下使用不要保養的専用高級油脂;4、体积小,重量轻:摆线针轮减速机采用行星传动原理,输入轴和输出轴在同一轴线上而且有与电动机直联呈一体的独特之处,因而摆线针轮减速机本身具有结构紧凑,体积小、重量轻的特点。
用它代替两级普通圆柱齿轮减速器,体积可减少1/2~2/3;重量约减轻1/3~1/2。
5、拆装方便,容易维修:由于摆线针轮减速机结构设计合理、拆装简单便于维修,使用零件个数少以及润滑简单。
6、使用可靠、故障少、寿命长:主要传动啮合件使用耐磨耗及耐疲劳性能良好的高炭铬轴承钢制造,经淬火处理(HRC58-62)获得高强度,因此摆线针轮减速机机械性能好,耐磨性能好;运转接触采用滚动磨擦,基本上无磨损,故故障少、寿命长,其寿命较普通齿轮减速器可提高2-3倍。
7、运行平平稳,噪音小:摆线针齿啮合齿数较多,重叠系数大以及具有机件平稳的机理,使振动和噪声限制在最小程度。
8、因此,摆线针轮减速机正因为具有这些其它种类减速机不可替代的优越性和特点,所以摆线针轮减速机在各种机械行业被广泛使用,并深受用户的欢迎和信赖!二、摆线针轮减速机一种采用少齿差行星传动原理的新颖减速装置,可广泛用于石油、环保、化工、水泥、输送、纺织、制药、食品、印刷、起重、矿山、冶金、建筑、发电等行业,做为驱动或减速装置,适用工作温度为正负40度,因此,摆线针轮减速机受到用户的普遍欢迎并在各个行业和领域被广泛的使用。
更新资料:山社PG行星减速(以此为准) (2)

参数:
单出轴
型号
双出轴
保持转矩 额定电流 基本步进角
最大力矩 速度范围 引线数 电机长度 减速箱长度
减速比
N.m
A
度
N.m (r/min) pin (mm)
(mm)
28PG1060-004 28PG1061-004 0.2 0.6 0.486 1:3.7 0.2 0-420 4
51
24.5
28PG1100-005 28PG1101-005 0.2
1
0.36 1:5 0.2 0-240 6
51
24.5
28PG2100-015 28PG2101-015 0.3
1
0.12 1:15 0.3 0-100 4
51
31
28PG2100-035 28PG2101-035 0.4
1
0.051 1:35 0.4 0-43 6
51
31
28PG3140-050 28PG3141-050 0.6 1.4 0.036 1:50 0.6 0-38 4
8
0-120
4
77
53
57PG2450-020 57PG1451-020
10
4.5
0.09
1:20
10 0-60
4
54
70
57PG2400-020 57PG2401-020 12
4
0.09
1:20
12 0-60
4
77
70
注:以上为标准常备库存产品,另还有15.25.30.40.50.100的减速比可选,及加装刹车,编码器等。
28PG系列行星减速箱 SAMSR MOTOR
基本参数:
NEUGART行星减速机---PLS型

x
(1)
M5 x12 3 70 29,5
(1) (2)
(2)
motor flange length (2)
29 L20
L22
(3)
L1 j6/k6
(3)
dimensions refer to the mounted motor-type, see page 29 for longer motor shafts (L20) applies: The measure L22 and L1 will be lengthen by the same amount as the motor shaft for shaft fit j6/k6
ratios (i=nin /nout) number of stages these values refer to a speed of the output shaft of n2 = 100 min-1, on duty cycle KA =1 and S1-mode for electrical machines and T=30 °C half way along the output shaft; calculation see page 32 refering to the middle of the body surface depends on the motor shaft diameter allowed 500 times depends on ratio
D20 L20 D21 D22 G3 L21 Q3 L22
(1) (2)
(1)(3) (2)
pinion bore (1)(3) motor shaft length (2) Ø(1)
(1)
减速机型号大全
减速机是一种相对精密的机械,使用它的目的是降低转速,增加转矩。
它的种类繁多,型号各异,不同种类有不同的用途。
很多刚开始接触减速机行业的朋友,都觉得减速机分类复杂,很难理解,其实减速器的种类虽然繁多,按照传动类型可分为齿轮减速器、蜗杆减速器和行星齿轮减速器;按照传动级数不同可分为单级和多级减速器;按照齿轮形状可分为圆柱齿轮减速器、圆锥齿轮减速器和圆锥-圆柱齿轮减速器;按照传动的布置形式又可分为展开式、分流式和同轴式减速器。
以下给大家介绍下减速机选型知识以及减速机型号问题.A:齿轮减速机1、齿轮减速机,结合国际技术要求制造,具有很高的科技含量。
2、节省空间,可靠耐用,承受过载能力高,功率可达90KW以上。
3、能耗低,性能优越,减速机效率高达95%以上。
4、振动小,噪音低,节能高,选用优质段钢材料,钢性铸铁箱体,齿轮表面经过高频热处理。
5、经过精密加工,确保轴平行度和定位的精度,这一切构成了齿轮传动总成的减速机配置了各类电机,形成了机电一体化,完全保证了产品使用质量特征。
B、摆线减速机行星摆线减速机是一种应用行星传动原理,采用摆线针轮啮合,设计先进、结构新颖的减速机构。
这种减速机在绝大多数情况下已替代两级、三级普通圆柱齿轮减速机及圆柱蜗杆减速机,在军工、航天、冶金、矿山、石油、化工、船舶、轻工、食品、纺织、印染、制药、橡胶、塑料、及起重运输等方面得到日益广泛的应用。
产品特点传动比大。
一级减速时传动比为1/6--1/87。
两级减速时传动比为1/99--1/7569;三级传动时传动比为1/5841--1/658503。
另外根据需要还可以采用多级组合,速比达到指定大。
2.传动效率高。
由于啮合部位采用了滚动啮合,一般一级传动效率为90%--95%。
3.结构紧凑,体积小,重量轻。
体积和普通圆柱齿轮减速机相比可减小2/1--2/3。
4.故障少,寿命长。
主要传动啮合件使用轴承钢磨削制造,因此机械性能与耐磨性能均佳,又因其为滚动摩擦,因而故障少,寿命长。
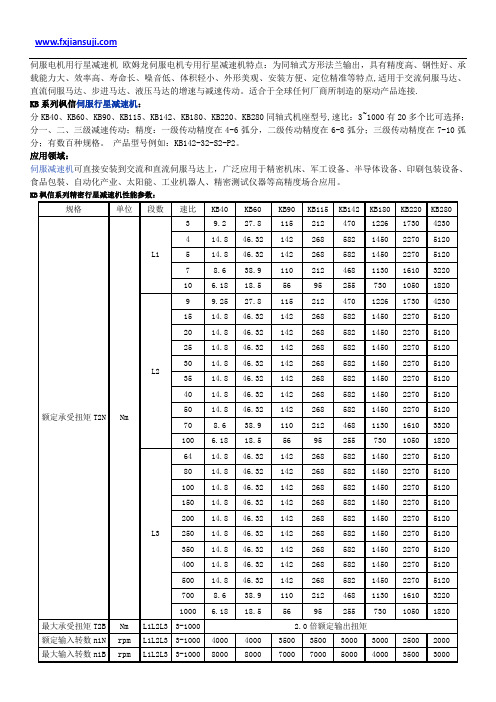
伺服电机用行星减速机
伺服电机用行星减速机欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:精密背隙P1arcmin L1 3-10. ≤4≤4≤4≤4≤4≤4≤4≤4 L2 9-100 ≤6≤6≤6≤6≤6≤6≤6≤6 L3 64-1000 ≤7≤7≤7≤7≤7≤7≤7≤7标准背隙P2 L1 3-10. ≤6≤6≤6≤6≤6≤6≤6≤6 L2 9-100 ≤8≤8≤8≤8≤8≤8≤8≤8 L3 64-1000 ≤10≤10≤10≤10≤10≤10≤10≤10容许径向力F1 N L1L2L3 3-1000 780 850 2250 4700 6400 8500 40000 60000 容许轴向力F2 N L1L2L3 3-1000 390 450 1100 2350 3700 4250 20000 30000 使用寿命h L1L2L3 3-1000 20000效率η%L1 3-10. 97% 97% 97% 97% 97% 97% 97% 97% L2 9-100 94% 94% 94% 94% 94% 94% 94% 94% L3 64-1000 91% 91% 91% 91% 91% 91% 91% 91%重量kg L1 3-10. 0.5 1.4 4.2 9.2 20 34 48 90 L2 9-100 0.8 1.9 5.2 11.3 24.5 42 60 115 L3 64-1000 1.1 2.4 6.2 13.2 28 50 72 140噪音dB L1L2L3 3-1000 ≤58≤58≤65≤65≤70≤70≤75≤75使用温度℃L1L2L3 3-1000KB系列精密行星减速机转动惯量:规格单位段数速比KB40 KB60 KB90 KB115 KB142 KB180 KB220 KB280转动惯量kg.cm²L13/4/5. 0.03 0.18 0.75 2.85 12.4 15.3 34.8 44.9 7-10. 0.018 0.12 0.45 1.95 8.1 14.8 28.6 39.2 L29-50 0.023 0.15 0.52 2.15 7.6 15.2 32.2 41.8 70-100 0.018 0.072 0.38 1.85 6.9 14.6 26.7 32.6 L364-350 0.016 0.07 0.36 2.05 6.3 14.2 18.3 28.1 400-1000 0.016 0.065 0.29 1.65 4.3 12.6 13.7 22.5配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11(F7)35 ф50(H7) 5 64 126 145 164400W 70 4-M4 ф14(F7)35 ф50(H7) 5 64 126 145 164配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211 750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1000W 115 4-M8 19F7 55 95(H7) 5 130 185 208 231配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 203 235 259 1500W 145/130 4-M8 22/24F7 65 110(H7) 10 130 213 245 269 2000W 165 4-M10 32F7 65 130(H7) 10 150 233 265 389配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
减速器样本
YK9550数控锥齿轮滚动检验机
656kg
配件目录
图号
单位
材料
重量(kg) 价格(元)
1ST010214/15
套
HT200
312
1ST010201
套
25.4
1ST010202
套
29.63
1ST010203
套
49.54
1ST010204
套
117.64
1ST010201-1
件 20CrMnTi
9.6
1ST010202-3
件 20CrMnTi
13
安信机械制造有限公司
ANXINJIXIEZHIZAOYOUXIANGONGSI
14
安 信 机 械 ANXIN
减速器级别
齿数 模数 传动比 入轴结构尺寸 出轴结构尺寸
序号 1 2 3 4 5 6 7 8 9 10 11 12
名称 箱体 一轴总成 二轴总成 三轴总成 四轴总成 轴圆弧伞齿轮 圆弧伞齿轮 齿轮轴 齿轮 齿轮轴 正齿轮 从动轴
矿用硬齿面减速器系列
● JS-30I减速器 ● 40T减速器 ● JS-75减速器 ● 6JS(Ⅱ)减速器 ● 2JS-132减速器 ● SGZ-764/264减速器 ● MC3RLSF06F减速器 ● 27-2-108减速器
6
安 信 机 械 ANXIN
减速器级别
齿数 模数 传动比 入轴结构尺寸 出轴结构尺寸
克罗斯比(The Crosby Group)IP10电磁抵抗平衡螺纹栓说明书

Model IP10R (remote control opening and closing via a cable) available on request.
Weight Each (lb)
Dimensions (in)
Jaw A
B
C
D
E
F
G
H
J
K
3.97
0 - 0.63 1.73 5.12 7.99 1.57 4.53 1.65 1.10
IP10
• Lock open, lock closed ability with latch for pretension on material and then release of material.
• Optional IP-5000 Stinger assembly available (see page 428). Allows for easy connection
3.97
0 - 0.63 1.73 5.12 8.15 1.57 4.53 1.65 1.10
-
0.43
4.85
0 - 0.81 1.77 5.47 8.62 1.57 5.12 1.10 1.50
-
0.43
16.8
0 - 1.38 3.07 7.91 12.99 2.76 7.40 2.52 2.17 - 0.63
• All sizes are RFID EQUIPPED.
• Minimum WLL is 5% of maximum WLL for .5t IP10 only.
• Minimum WLL is 10% of maximum WLL for all other IP10, IP10J, IP10S, IP10H clamps.
NGW型行星齿轮减速器

NGW型行星齿轮减速器型式与尺寸(JB1799-76)详细介绍:发布时间:2007-6-26 11:39:23该标准包括单级、两级和三级三个系列的NGW型渐开线直齿圆柱齿轮行星减速器。
主要用于冶金、矿山等机械设备。
其适用条件如下:高速轴最高转数不超过1500r/min。
齿轮圆周速度不超过10m/s;工作环境温度为-40℃到+45℃;1型式与尺寸(1)单级减速器及组成两级和三级减速器的各级行星齿轮传动机械示意图如下:(2)型号与标记减速器的型号,包括减速器的系列代号、机座号、传动级数。
系列代号:NGW如图所示,这种减速器的特点是内啮合和外啮合之间公用着行星齿轮,故取“内、公、外”三字的汉语拼意字头组成“NGW”代表系列代号。
规格;机座号、传动级数及传动比代号用顺序数字表示之。
(3)型式与尺寸见表Ⅱ-44、表Ⅱ-45、表Ⅱ-46。
表Ⅱ-44单级减速器型式、尺寸表1机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量kg L B H H0R d Dl1l2t1b1t2b2L1L2L3LB1d1h1 NGW112.8-4.553282951250-0.5125355558538.515516215165251522M1620535-12.54773533857502 NGW212.8-4.564 353251400-0.5144671543.512 65.5182451853115.5235M225805-12.5535355538.516.5733 NGW312.8-4.5632 353651600-0.516457715491476202623125 27M225105-12.55694743.51262984 NGW412.8-4.573438425.51800-0.5185885 15551687242923315632M2430147 5-12.5634457514721285 NGW512.8-4.5845 42463.52000-0.5255985115616972431253196.536M24352135-12.572958555168.51936 NGW612.8-4.5886 4755242250-0.52256115 12565.518182836293522.545M3402895-12.5731558561667.52647 NGW72.8-4.59335355742500-0.525651115147.518119323753535213465M34035915-12.5 861565.51883018 NGW812.8-4.5142596342800-0.5287512115 1681212932443545219 51M36454495-12.589965157.518863999 NGW912.8-4.51141667213150-0.53158513125 1659224143647538545225.557M36456045-12.5976751158127.55421 0 NGW112.8-4.5126174583550-0.53559515140 21328161405254255251 645M4250815-12.5173851259224787321 1 NGW1112.8-4.51355848914000-0.5415 17160 2113281814058485263 74M425510605-12.511459514132873991 2 NGW1212.8-4.515951134500-0.545511519162412432 22456856628882M486016385-12.51281516113287314756表Ⅱ-45两级减速器型式、尺寸机座号型号规格公称传动比i0外形及中心高轴伸地脚尺寸质量/kg L B H H0R d Dl1l2t1b1t2b2L1L2L3LB1d1h4 NGW4214-22.568738425.51800-0.51835855 1528.518724292337232M243012825-160687355338 1305 NGW5214-22.5767 42463.52000-0.5249711543.5129724312538.536M243524425-160752355538.512416 NGW6214-22.585.54755242250-0.522545171254914182836293567.545M340291 25-18474127960 05.5 0 0 3.527 NGW7214-22.5895355742500-0.52550 1185 145516 1193237535358465M34035025-16087545749143508 NGW8214-22.5976.5596342800-0.52855128516616129324435458651M364548825-160976.558555164609 NGW9214-22.514667213150-0.531561315 16565.5181436475385457.557M364560725-16012558561657710 NGW1214-22.5114474583550-0.5355651515 27.51816140525425578645M425089525-160114461565.51889511 NGW11214-22.51222848914000-0.547517115 281218140584857374M425511225-160121265157.518107512 NGW12214-22.51385951134500-0.54558519125 2492242245685667382M4860173325-1601375751158121539表Ⅱ-46三级减速器型式、尺寸外形及中心高轴伸地脚尺寸质量/kgL B H H0R d D l1l2t1b1t2b2L1L2L3</,DIV>L0B197 3. 5 5355742500-0.5253011551433 81193237530535 8046510 71 596342800-0.5283512551638.51012932443545 865111 37 .5 667213150-0.531540137016543.51214364753854570.557127480353545 1570 2049 14 1640 524250 78 64W1 03 63 5 0 50-0.55 0 0 1 5 5 5 2 211 NGW1131359.5848914000-0.5405017852055 1618140584850 7374M4255116312 NGW12315049510134500-0.54555519852460 1620245685660 7382M48601756NGW型行星齿轮减速器基本参数(一)(JB1799-76)详细介绍:发布时间:2007-6-26 11:53:022.基本参数(1)公称中心距a及公称传动比i0。
一种工业重载机器人用中空型摆线减速机[实用新型专利]
![一种工业重载机器人用中空型摆线减速机[实用新型专利]](https://img.taocdn.com/s3/m/0d38a20511661ed9ad51f01dc281e53a58025118.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 202122545256.9(22)申请日 2021.10.21(73)专利权人 珠海飞马传动机械有限公司地址 519000 广东省珠海市香洲区南屏科技园屏北一路16号之一(72)发明人 黄志辉 耿建伟 郭斌 雷学锋 邓云庆 易锐 (74)专利代理机构 济南鼎信专利商标代理事务所(普通合伙) 37245代理人 梁国海(51)Int.Cl.F16H 1/32(2006.01)F16H 57/023(2012.01)F16H 57/021(2012.01)F16H 57/028(2012.01)F16H 57/08(2006.01)(54)实用新型名称一种工业重载机器人用中空型摆线减速机(57)摘要本实用新型公开了一种工业重载机器人用中空型摆线减速机,包括输入齿轮轴、连体恒星齿、内六角圆柱头螺钉、圆锥销、行星架调整垫片、深沟球轴承、前行星架、角接触球轴承、后行星架、针壳、骨架油封和行星传动机构。
该工业重载机器人用中空型摆线减速机,单差齿啮合更易实现高的传动链误差和回差要求,刚性更好,齿隙更小,可避免减速机使用过程中出现抖动,阻尼震动过大的情况,具有结构合理、体积小、效率高、成本低等特点,拓宽了RV减速机的适用范围。
本实用新型的优点在于简化了结构设计,便于零件加工制造,降低了成本,同时具有效率高、重量轻、运转平稳、耐冲击、噪音低、过载能力强、寿命长等特点。
权利要求书1页 说明书3页 附图2页CN 216045250 U 2022.03.15C N 216045250U1.一种工业重载机器人用中空型摆线减速机,包括输入齿轮轴(1)、连体恒星齿(2)、内六角圆柱头螺钉(5)、圆锥销(6)、行星架调整垫片(13)、深沟球轴承(14)、前行星架(15)、角接触球轴承(18)、后行星架(19)、针壳(20)、骨架油封(21)和行星传动机构,其特征在于:所述输入齿轮轴(1)与连体恒星齿(2)啮合,所述连体恒星齿(2)的左端套接在深沟球轴承(14)的内侧,所述深沟球轴承(14)套接在前行星架(15)的右端内侧,靠右侧角接触球轴承(18)套接在前行星架(15)靠左端外壁,行星架调整垫片(13)垫在前行星架(15)与靠右侧角接触球轴承(18)之间,所述针壳(20)套接在靠右侧角接触球轴承(18)的左侧,靠左侧角接触球轴承(18)套接在针壳(20)左端内侧,所述后行星架(19)套接在靠左侧角接触球轴承(18)内部,后行星架(19)通过内六角圆柱头螺钉(5)与前行星架(15)固定安装,所述圆锥销(6)通过前行星架(15)右侧插入至后行星架(19)的内部,骨架油封(21)卡在后行星架(19)与针壳(20)左侧壁的间隙内部,行星传动机构设置在针壳(20)的内部;所述行星传动机构包括行星齿(3)、轴用挡圈(4)、偏心轴(7)、圆锥滚子轴承(8)、钢保持架滚针轴承(9)、偏心轴垫片(10)、孔用挡圈(11)、滚针(12)、前摆线轮(16)和后摆线轮(17),所述行星齿(3)通过轴用挡圈(4)卡接在偏心轴(7)的右端,所述圆锥滚子轴承(8)通过孔用挡圈(11)卡接在前行星架(15)的内部,偏心轴(7)的右端套接在圆锥滚子轴承(8)的内部,所述钢保持架滚针轴承(9)套接在偏心轴(7)的外部,偏心轴垫片(10)垫在圆锥滚子轴承(8)与钢保持架滚针轴承(9)之间,钢保持架滚针轴承(9)套接在前摆线轮(16)的内部,所述滚针(12)卡在针壳(20)的内部并位于前摆线轮(16)和后摆线轮(17)外侧空腔内部。
NGW行星轮减速器设计
NGW行星减速器的设计之青柳念文创作摘要本文完成了对一级行星齿轮减速器的布局设计.该减速器具有较小的传动比,而且,它具有布局紧凑、传动效率高、外廓尺寸小和重量轻、承载才能大、运动平稳、抗冲击和震动的才能较强、噪声低的特点,适用于化工、轻工业以及机器人等范畴.这些功用对于现代机械传动的发展有着较重要的意义.首先简要先容了课题的布景以及齿轮减速器的研究现状和发展趋势,然后比较了各种传动布局,从而确定了传动的基本类型.论文主体部分是对传动机构主要构件包含太阳轮、行星轮、内齿圈及行星架的设计计算,通过所给的输入功率、传动比、输入转速以及工况系数确定齿轮减速器的大致布局之后,对其停止了整体布局的设计计算和主要零部件的强度校核计算.其中该减速器的设计与其他减速器的布局设计相比有三大特点:其一,为了使三个行星轮的载荷平均分配,采取了齿式浮动机构,即太阳轮与高速轴通过齿式联轴器将二者毗连在一起,从而实现了太阳轮的浮动;其二,该减速器的箱体采取的是法兰式箱体,上下箱体分别铸造而成;其三,内齿圈与箱体采取分离式,通过螺栓和圆锥销将其与上下箱体固定在一起.最后对整个设计过程停止了总结,基本上完成了对该减速器的整体布局设计.关键词:行星齿轮,传动机构,布局设计,校核计算The design of NGW planetary gear reducerABSTRACTThis completed a single-stage planetary gear reducer design. The gear has a smaller transmission ratio, and it has a compact, high transmission efficiency, outline, small size and light weight, carrying capacity, smooth motion, shock and vibration resistant and low noise characteristics, Used in chemical, light industry and robotics fields. The function of the development of modern mechanical transmission has a more important significance.First paper introduces the background and the subject of gear reducer situation and development trend, and then compared various transmission structures, which determine the basic type of transmission. Thesis is the main part of the main components of drive mechanism including the sun wheel, planet gear, ring gear and planet carrier in the design calculation, given by the input power, gear ratio, input speed and the condition factor to determine the approximate structure after the gear reducer And to carry out the design and calculation of the overall structure and main components of the strength check calculation. One of the other gear reducer design and compared the structural design of the three major characteristics: First, the three planetary gear to make the load evenly, using a gear-type floating body, the sun gear and high-speed shaft through the gear together Coupling the two together to achieve a floating sun gear; Second, the box uses a reducer flange box, upper and lower box were cast;Third, the ring gear and Box with separate, through bolts and tapered pins will be fixed together with the upper and lower box. Finally, a summary of the entire design process is basically complete the overall design of the reducer.KEY WORDS:planetary gear,driving machanism,structural design,checking calculation目录前言1第1章传动方案的确定51.1 设计任务51.1.1 齿轮传动的特点51.1.2 齿轮传动的两大类型561.2.1 行星机构的类型及特点61.2.2 确定行星齿轮传动类型8第2章齿轮的设计计算102.1 配齿计算102.1.1 确定各齿轮的齿数102.1.2 初算中心距和模数112.2 几何尺寸计算122.3 装配条件验算152.3.1 邻接条件152.3.2 同心条件152.3.2 装置条件152.4 齿轮强度校核162.4.1 a-c传动强度校核162.4.1 c-b传动强度校核21第3章轴的设计计算263.1 行星轴设计263.2 转轴的设计283.2.1 输入轴设计283.2.2 输出轴设计29第4章行星架和箱体的设计314.1 行星架的设计314.1.1 行星架布局方案314.1.2 行星架制造精度334.2 箱体的设计35结论37谢辞38参考文献38附录40外文资料翻译43主要代号)rad)rad前言本课题通过对行星齿轮减速器的布局设计,初步计算出各零件的设计尺寸和装配尺寸,并对涉及成果停止参数化分析,为行星齿轮减速器产品的开辟和性能评价实现行星齿轮减速器规模化生产提供了参考和实际依据.通过本设计,要能弄懂该减速器的传动原理,达到对所学知识的复习与巩固,从而在以后的工作中能处理近似的问题.齿轮是使用量大面广的传动元件.今朝世器上齿轮最大传递功率已达6500kW,最大线速度达210m/s(在实验室中达300m/s);齿轮最大重量(组合式),最大模数m达50mm.我国自行设达200t,最大直径达m256.计的高速齿轮(增)减速器的功率已达44000kW,齿轮圆周速度达150m/s以上.由齿轮、轴、轴承及箱体组成的齿轮减速器,用于原动机和工作机或执行机构之间,起匹配转速和传递转矩的作用,在现代机械中应用极为广泛.20世纪末的20多年,世界齿轮技术有了很大的发展.产品发展的总趋势是小型化、高速化、低噪声、高靠得住度.技术发展中最引人注目标是硬齿面技术、功率分支技术和模块化设计技术.硬齿面技术到20世纪80年月时在国外日趋成熟.采取优质合金钢锻件渗碳淬火磨齿的硬齿面齿轮,精度不低于IS01328一1975的6级,综合承载才能为中硬齿面调质齿轮的4倍,为软齿而齿轮的5一6倍.一个中等规格的硬齿面齿轮减速器的重量仅为软齿面齿轮减速器的1/3左右.功率分支技术主要指行星及大功率齿轮箱的功率双分及多分支装置,如中心传动的水泥磨主减速器,其核心技术是均载.模块化设计技术对通用和尺度减速器旨在追求高性能和知足用户多样化大覆盖面需求的同时,尽可以减少零部件及毛坯的品种规格,以便于组织生产,使零部件生产形成批量,降低成本,取得规模效益.其他技术的发展还表示在实际研究(如强度计算、修形技术、现代设计方法的应用,新齿形、新布局的应用等)更完善、更接近实际;普遍采取各种优质合金钢锻件;资料和热处理质量节制水平的提高;布局设计更合理;加工精度普遍提高到ISO的4一6级;轴承质量和寿命的提高;润滑油质量的提高;加工装备和检测手段的提高等方面.这些技术的应用和日趋成熟,使齿轮产品的性能价格比大大提.高,产品越来越完美.如非常粗略地估计一下,输出IOONm转矩的齿轮装置,如果在1950年时重10kg,到80年月便可做到仅约lkg.20世纪70年月至90年月初,我国的高速齿轮技术履历了测绘仿制、技术引进(技术攻关)到独立设计制造3个阶段.现在我国的设计制造才能基本上可知足国内生产需要,设计制造的最高参数:最大功率44MW,最高线速度168m/s,最高转速67000r/min.我国的低速重载齿轮技术,特别是硬齿面齿轮技术也履历了测绘仿制等阶段,从无到有逐步发展起来.除了试探掌握制造技术外,在20世纪80年月末至90年月初推广硬齿面技术过程中,我们还作了处理“断轴”、“选用”等一系列有意义的工作.在20世纪70-80年月一直认为是国内重载齿轮两大困难的“水泥磨减速器”和“轧钢机械减速器”,可以说已完全处理.20世纪80年月至90年月初,我国相继制订了一批减速器尺度,如ZBJ19004一88《圆柱齿轮减速器》、ZBJ19026一90《运输机械用减速器》和YB/T050一93《冶金设备用YNK齿轮减速器》等几个硬齿面减速器尺度,我国有自己知识产权的尺度,如YB/T079 - 95《三环减速器》.按这些尺度生产的许多产品的主要技术指标都可达到或接近国外同类产品的水平,其中YNK减速器较完整地吸取了德国FLENDER公司同类产品的特点,并连系国情作了许多改进与创新.(1)渐开线行星齿轮效率的研究行星齿轮传动的效率作为评价器传动性能优劣的重要指标之一,国表里有许多学者对此停止了系统的研究.现在,计算行星齿轮传动效率的方法很多,国表里学者提出了许多有关行星齿轮传动效率的计算方法,在设计计算中,较常常使用的计算方有3种:啮合功率法、力偏移法、和传动比法(克莱依涅斯法),其中以啮合功率法的用途最为广泛,此方法用来计算普通的2K2H和3K型行星齿轮的效率十分方便.(2)渐开线行星齿轮均载分析的研究现状行星齿轮传动具有布局紧凑、质量小、体积小、承载才能大等优点.这些都是由于在其布局上采取了多个行星轮的传动方式,充分操纵了同心轴齿轮之间的空间,使用了多个行星轮来分担载荷,形成功率流,并合理的采取了内啮合传动,从而使其具有了上述的许多优点.但是,这只是最抱负的情况,而在实际应用中,由于加工误差和装配误差的存在,使得在传动过程中各个行星轮上的载荷分配不平均,造成载荷有集中在一个行星轮上的现象,这样,行星齿轮的优越性就得不到发挥,甚至不如普通的外传动布局.所以,为了更好的发挥行星齿轮的优越性,均载的问题就成了一个十分重要的课题.在布局方面,起初人们只尽力地提高齿轮的加工精度,从而使得行星齿轮的制造和装配变得比较坚苦.后来通过时间采纳了对行星齿轮的基本构件径向不加限制的专门措施和其它可自动调位的方法,即采取各种机械式地均载机构,以达到各行星轮间的载荷分布平均的目标.典型的几种均载机构有基本构件浮动的均载机构、杠杆联动均载机构和采取弹性件的均载机构.随着我国市场经济的推进,“九五”期间,齿轮行业的专业化生产水平有了分明提高,如一汽、二汽等大型企业集团的齿轮变速箱厂、车轿厂,通过企业改组、改制,改为相对独立的专业厂,参与市场竞争;随着兵工转平易近用,农机齿轮企业转加工非农用齿轮产品,调整了企业产品布局;私有企业的堀起,中外合资企业的涌现,齿轮行业的整体布局得到优化,行业实力增强,技术前进加快.近十几年来,计算机技术、信息技术、自动化技术在机械制造中的广泛应用,改变了制造业的传统观念和生产组织方式.一些先进的齿轮生产企业已经采取精益生产、火速制造、智能制造等先进技术.形成了高精度、高效率的智能化齿轮生产线和计算机网络化管理.适应市场要求的新产品开辟,关键工艺技术的创新竞争,产品质量竞争以及员工技术素质与创新精力,是2l世纪企业竞争的核心.在2l世纪成套机械装备中,齿轮仍然是机械传动的基本部件.由于计算机技术与数控技术的发展,使得机械加工精度、加工效率太为提高,从而推动了机械传动产品多样化,整机配套的模块化、尺度化,以及造型设计艺术化,使产品更加精美、雅观.CNC机床和工艺技术的发展,推动了机械传动布局的飞速发展.在传动系统设计中的电子节制、液压传动,齿轮、带链的混合传动,将成为变速箱设计中优化传动组合的方向.在传动设计中的学科交叉,将成为新型传动产品发展的重要趋势.工业通用变速箱是指为各行业成套装备及生产线配套的大功率和中小功率变速箱.国内的变速箱将继续淘汰软齿面,向硬齿面(50~60HRC)、高精度(4~5级)、高靠得住度软启动、运行监控、运行状态记录、低噪声、高的功率与体积比和高的功率与重量比的方向发展.中小功率变速箱为适应机电一体化成套装备自动节制、自动调速、多种节制与通讯功能的接口需要,产品的布局与外型在相应改变.矢质变频代替直流伺服驱动,已成为近些年中小功率变速箱产品(如摆轮针轮传动、谐波齿轮传动等)追求的方针.随着我国航天、航空、机械、电子、动力及核工业等方面的疾速发展和工业机器人等在各工业部分的应用,我国在谐波传动技术应用方面已取得显著成绩.同时,随着国家高新技术及信息财产的发展,对谐波传动技术产品的需求将会更加突出.总之,当当代界各国减速器及齿轮技术发展总趋势是向六高、二低、二化方面发展.六高即高承载才能、高齿面硬度、高精度、高速度、高靠得住性和高传动效率;二低即低噪声、低成本;二化即尺度化、多样化.减速器和齿轮的设计与制造技术的发展,在一定程度上标记着一个国家的工业水平,因此,开辟和发展减速器和齿轮技术在我国有广阔的前景.的基本内容:(1)选择传动方案.传动方案的确定包含传动比的确定和传动类型的确定.(2)设计计算及校核.传动布局的设计计算,都大致包含:选择传动方案、传动零件齿轮的设计计算与校核、轴的设计计算与校核、轴承的选型与寿命计算、键的选择与强度计算、箱体的设计、润滑与密封的选择等.在对行星齿轮减速器的布局停止深入分析的基础上,依据给定的减速器设计的主要参数,通过CAD绘图软件建立行星齿轮减速器各零件的二维平面图,绘制出减速器的总装图对其停止分析.第1章传动方案的确定1.1 设计任务设计一个行星齿轮传动减速器.原始条件和数据:传动比i=5.5,功率p=120kw,输入转速N=1000 rpm,中等冲击.使用寿命10年.且要求该齿轮传动布局紧凑、外廓尺寸较小.齿轮传动的特点齿轮传动与其它传动比较,具有瞬时传动比恒定、工作靠得住、寿命长、效率高、可实现平行轴任意两相交轴和交错轴之间的传动,适应的圆周速度和传动功率范围大,但齿轮传动的制造成本高,低精度齿轮传动时噪声和振动较大,不适宜于两轴间间隔较大的传动.齿轮传动是以主动轮的轮齿依次推动从动轮来停止工作的,是是现代机械中应用十分广泛的一种传动形式.齿轮传动可按一对齿轮轴线的相对位置来划分,也可以按工作条件的分歧来划分.随着行星传动技术的迅速发展,今朝,高速渐开线行星齿轮传动装置所传递的功率已达到20000kW,输出转矩已达到4500kN m•.占有关资料先容,人们认为今朝行星齿轮传动技术的发展方向如下.(1)尺度化、多品种今朝世界上已有50多个渐开线行星齿轮传动系列设计;而且还演化出多种型式的行星减速器、差速器和行星变速器等多品种的产品.(2)硬齿面、高精度行星传动机构中的齿轮广泛采取渗碳和氮化等化学热处理.齿轮制造精度一般均在6级以上.显然,采取硬齿面、高精度有利于进一步提高承载才能,使齿轮尺寸变得更小.(3)高转速、大功率行星齿轮传动机构在高速传动中,如在高速汽轮中已获得日益广泛的应用,其传动功率也越来越大.(4)大规格、大转矩在中低速、重载传动中,传递大转矩的大规格的行星齿轮传动已有了较大的发展.齿轮传动的两大类型轮系可由各种类型的齿轮副组成.由锥齿轮、螺旋齿轮和蜗杆涡轮组成的轮系,称为空间轮系;而由圆柱齿轮组成的轮系,称为平面轮系.根据齿轮系运转时各齿轮的几何轴线相对位置是否变动,齿轮传动分为两大类型.(1)普通齿轮传动(定轴轮系)当齿轮系运转时,如果组成该齿轮系的所有齿轮的几何位置都是固定不变的,则称为普通齿轮传动(或称定轴轮系).在普通齿轮传动中,如果各齿轮副的轴线均相互平行,则称为平行轴齿轮传动;如果齿轮系中含有一个相交轴齿轮副或一个相错轴齿轮副,则称为不服行轴齿轮传动(空间齿轮传动).(2)行星齿轮传动(行星轮系)当齿轮系运转时,如果组成该齿轮系的齿轮中至少有一个齿轮的几何轴线位置不固定,而绕着其他齿轮的几何轴线旋转,即在该齿轮系中,至少具有一个作行星运动的齿轮,则称该齿轮传动为行星齿轮传动,即行星轮系.行星机构的类型及特点行星齿轮传动与普通齿轮传动相比较,它具有许多独特的优点.行星齿轮传动的主要特点如下:(1)体积小,质量小,布局紧凑,承载才能大.一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的51~21(即在承受相同的载荷条件下).(2)传动效率高.在传动类型选择恰当、布局安插合理的情况下,其效率值可达0.97~0,99.(3)传动比较大.可以实现运动的合成与分解.只要适当选择行星齿轮传动的类型及配齿方案,即可以用少数几个齿轮而获得很大的传动比.在仅作为传递运动的行星齿轮传动中,其传动比可达到几千.应该指出,行星齿轮传动在其传动比很大时,仍然可坚持布局紧凑、质量小、体积小等许多优点.(4)运动平稳、抗冲击和振动的才能较强.由于采取了数个布局相同的行星轮,平均地分布于中心轮的周围,从而可使行星轮与转臂的惯性力相互平衡.同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的才能较强,工作较靠得住.最罕见的行星齿轮传动机构是NGW 型行星传动机构.行星齿轮传动的型式可按两种方式划分:按齿轮啮合方式分歧分有NGW、NW、NN、WW、NGWN和N等类型.按基本布局的组成情况分歧有2Z-X、3Z、Z-X-V、Z-X等类型.行星齿轮传动最显著的特点是:在传递动力时它可停止功率分流;同时,其输入轴与输出轴具有同轴性,即输入轴与输出轴均设置在同一主轴线上.所以,行星齿轮传动现已被人们用来代替普通齿轮传动,而作为各种机械传动系统的中的减速器、增速器和变速装置.尤其是对于那些要求体积小、质量小、布局紧凑和传动效率高的航空发动机、起重运输、石油化工和刀兵等的齿轮传动装置以及需要变速器的汽车和坦克等车辆的齿轮传动装置,行星齿轮传动已得到了越来越广泛的应用,表1-1列出了常常使用行星齿轮传动的型式及特点:表1-1常常使用行星齿轮传动的传动类型及其特点传动形式简图性能参数特点传动比效率最大功率/kWNGW (2Z-X负号机构)BAXi=1.13~13.7推荐2.8~9不限效率高,体积小,重量轻,布局简单,制造方便,传递公路范围大,轴向尺寸小,可用于各个工作条件,在机械传动中应用最广.单级传动比范围较小,耳机和三级传动均广泛应用NW (2Z-X 负号机构)BAXi=1~50推荐7~21效率高,径向尺寸比NGW型小,传动比范围较NGW型大,可用于各种工作条件.但双联行星齿轮制造、装置较复杂,故|BAXi| 7时不宜采取NN (2Z-X 负号机构)推荐值:BXEi=8~30≤40 传动比打,效率较低,适用于短期工作传动.当行星架X从动时,传动比|i|大于某一值后,机构将发生自锁WW (2Z-X 负号机构)BXAi=1.2~数千|BXAi|=1.2~5时,效率可达0.9~0.7,i>5以后.随|i|增加徒降≤20 传动比范围大,但外形尺寸及重量较大,效率很低,制造坚苦,一般不必与动力传动.运动精度低也不必于分度机构.当行星架X从动时,|i|从某一数值起会发生自锁.常常使用作差速器;其传动比取值为XABiNGW (Ⅰ)型(3Z)小功率传动BAEi≤500;推荐:BAEi=20~100BAEi增加而下降短期工作≤120,长期工作≤10布局紧凑,体积小,传动比范围大,但效率低于NGW型,工艺性差,适用于中小功率功率或短期工作.若中心轮A输出,当|i|大于某一数值时会发生自锁NGWN (Ⅱ)型(3Z)BAEi=60~500推荐:BAEi=64~300bAEi增加而下降短期工作≤120,长期工作≤10布局更紧凑,制造,装置比上列Ⅰ型传动方便.由于采取单齿圈行星轮,需角度变成才干知足同心条件.效率较低,宜用于短期工作.传动自锁情况同上确定行星齿轮传动类型根据设计要求:持续运转、传动比小、布局紧凑和外廓尺寸较小.根据表1-1中传动类型的工作特点可知,2Z-X(A)型效率高,体积小,机构简单,制造方便.适用于任何工况下的大小功率的传动,且广泛地应用于动力及辅助传动中,工作制度不限.本设计选用2Z-X(A)型行星传动较合理,其传动简图如图1-1所示.图1-1减速器设计方案(单级NGW—2Z-X(A)型行星齿轮传动)拟定的设计方案如下图:图2-2 减速器整体装配图第2章 齿轮的设计计算2.1 配齿计算确定各齿轮的齿数据2Z-X(A)型行星传动的传动比p i 值和按其配齿计算(见参考文献[1])公式(3-27)~公式(3-33)可求得内齿轮b 和行星轮c 的齿数b z 和c z .现思索到行星齿轮传动的外廓尺寸较小,故选择中心轮a 的齿数a z =17和行星轮p n =3.根据内齿轮 a p b z i z )1(-=1715.5⨯-=)(b z =76.5对内齿轮齿数停止圆整,同时思索到装置条件,取79=b z ,此时实际的p 值与给定的p 值稍有变更,但是必须节制在其传动比误差的范围内.实际传动比为a b z z i +=1=647.51779= 其传动比误差5.5647.55.5-=-=∆pp i i i i =2.67%由于外啮合采取角度变位的传动,行星轮c 的齿数c z 应按如下公式计算,即c ab c z z z z ∆+-=2'因为62=-a b z z 为偶数,故取齿数修正量为1-=∆c z .此时,通过角变位后,既不增大该行星传动的径向尺寸,又可以改善a-c 啮合齿轮副的传动性能.故c z =301-217-79= 在思索到装置条件为322==+C z z ba (整数)初算中心距和模数1. 齿轮资料、热处理工艺及制造工艺的选定太阳轮和行星轮资料为20GrMnTi ,概况渗碳淬火处理,概况硬度为57~ 61HRC.试验齿轮齿面接触疲劳极限lim H σ=1591Mpa. 试验齿轮齿根弯曲疲劳极限太阳轮lim F σ=485Mpa.行星轮lim F σ=485⨯0.7Mpa=339.5Mpa (对称载荷).齿形为渐开线直齿.最终加工为磨齿,精度为6级.内齿圈资料为38GrMoAlA ,淡化处理,概况硬度为973HV. 试验齿轮的接触疲劳极限lim H σ=1282Mpa 验齿轮的弯曲疲劳极限lim F σ=370MPa 齿形的终加工为插齿,精度为7级. 2. 减速器的名义输出转速2n 由 i =21n n 得 2n =in 1=5.51000min r min r3. 载荷不平衡系数P K采取太阳轮浮动的均载机构,取15.1==P P F H K K . 4. 齿轮模数m 和中心距a 首先计算太阳轮分度圆直径:3lim 21a 1d u u k k k T K H d H HP A td ±=∑σϕ式中:u 一齿数比为76.11730= A K 一使用系数为1.25; td K 一算式系数为768; ∑H K 一综合系数为2;1T 一太阳轮单个齿传递的转矩.ηηpp a n n P n T T 1119549===985.0100031209549⨯⨯⨯m N •=376m N •其中 η—高速级行星齿轮传动效率,取ηd ϕ—齿宽系数暂取a d blim H σ=1450Mpa代入3lim 21a 1d uu k k k T K H d H HP A td ±=∑σϕ32a 76.1)176.1(15915.06.115.125.123.376768d +⨯⨯⨯⨯⨯⨯=mm 模数 m =63.41766.78==a a z d 取 m =5 则 mm z z m a g a )3017(521)(210+⨯⨯=+=mm取 mm a 5.122=齿宽 5.421755.0=⨯⨯=•=d b d ϕ 取 mm b 62=2.2 几何尺寸计算1. 计算变位系数 (1) a-c 传动 啮合角ac α 因 20cos 5.1225.117cos cos 0==ααa a ac所以 ac α=“‘543920变位系数和ααα2tan )(inv inv z z x ac c a -+=∑=(17+30)⨯20tan 220543920"'inv inv -图2-1选择变位系数线图中心距变动系数y y=55.1175.1220-=-m a a =1 齿顶降低系数y ∆141.01141.1=-=-=∆∑y x y 分配边位系数:根据线图法,通过查找线图2-1 中心距变动系数y y=55.1175.1220-=-m a a =1 齿顶降低系数y ∆141.01141.1=-=-=∆∑y x y 分配边位系数:根据线图法,通过查找线图2-1 得到边位系数 549.0=a x则 592.5490.0141.1-=-=∑a c x x x (2) c-b 传动由于内啮合的两个齿轮采取的是高度变位齿轮,所以有0=+=∑b c x x x从而 592.0-=-=c b x x 且 a a ='αα='0=y 0=∆y 2. 几何尺寸计算成果对于单级的2Z-X(A)型的行星齿轮传动按公式停止几何尺寸的计算,各齿轮副的计算成果如下表:表3-1各齿轮副的几何尺寸的计算成果注:齿顶高系数:太阳轮、行星轮—1=*a h ,内齿轮—8.0=*a h ;顶隙系数:内齿轮—25.0=*c2.3 装配条件验算对于所设计的单级2Z-X(A)型的行星齿轮传动应知足如下装配条件 邻接条件按公式验算其邻接条件,即p ac ac n a d πsin 2'<已知行星轮c 的齿顶圆的直径ac d =164.513,5.122'=ac a 和3=p n 代入上式,则得mm 176.2123sin 5.1222=⨯⨯<π知足邻接条件同心条件按公式对于角变位有''cos cos bc c b ac ca z z z z αα-=+已知17=a z 30=c z 79=b z ,"''543925 =ac α 20'=bc α代入上式得20cos 3079543920cos 3017"'-=+ 装置条件按公式验证其装置条件,即得)(整数C n z z pb a =+ 将 17=a z 79=b z 3=p n 代入该式验证得3237917=+ 知足装置条件 啮合要素的验算1. a-c 传动端面重合度a ε(1)顶圆齿形曲率半径a ρ22)2()2(b a a d d -=ρ 太阳轮221)2874.79()20076.99(-=a ρmm 行星轮222)2954.140()2513.164(-=a ρ mm(2)端面啮合长度a g)sin (''21t a a a a g αρρ-±=式中“±”号正号为外啮合,负号为内啮合;'t α端面节圆啮合角.直齿轮't α=ac α="'543925则mm g a )543925sin 5.122416.4231.29("' ⨯-+= mm(3)端面重合度 20cos 567.18)cos /(cos ⨯==παπβεt n a a m g2. b c -端面重合度a ε(1)顶圆齿形曲率半径a ρ 22)2()2(b a a d d -=ρ 行星轮1a ρ由上面计算得,1a ρmm 内齿轮222)218.371()208.391(-=a ρmm mm(2)端面啮合长度a g''21sin t a a a a g αρρ+-== 20sin 5.122597.61146.42⨯+-mmmm(3)端面重合度 )cos /(cos t n a a a m g πβε= =20cos 505.24⨯π 2.4 齿轮强度校核2.4.1 a-c 传动强度校核本节仅列出相啮合的小齿轮(太阳轮)的强度计算过程,大齿轮(行星。