切换参数学习
百词斩切换计划学习

百词斩切换计划学习
下载完百词斩后,我第一时间就开始了我的学习计划,我每天早上起床后就打开这个软件,开始学习新的单词和短语,刚开始的时候我觉得这些单词和短语都很新奇,有些甚至让我
觉得挺好玩的,但是随着学习的深入,我发现自己并不能一直保持这样的学习状态,很快
我就开始觉得学习这些单词和短语是一件很枯燥的事情,我甚至开始怀疑这个软件到底能
不能帮我提高我的英语水平。
然而在经过几天的学习后,我渐渐发现自己的英语水平似乎有了一些提高,就在我开始对
这个软件有了些许怀疑的时候,一次偶然的机会,我去面试了一家外企,经过面试官的一
番考察后,我竟然顺利通过了面试,成为了这家公司的一名员工,当时我觉得这一切都有
些不可思议,所以我就向老板询问了一下他为何会录用我,他说是因为我在英语方面的能
力比其他应聘者要强,听到这句话后,我内心突然涌上了一股莫名的喜悦感,我开始坚信
这一切都是因为百词斩的帮助。
从那之后,我便把百词斩当成了我的必备学习工具,每天都花费一些时间在这个软件上,
学习新的单词和短语,而且我还制定了自己的学习计划,每周都去参加一次外语角,和外
国人交流,这对我提高口语能力也是非常有帮助的。
现如今,我已经是百词斩的忠实粉丝了,我已经坚持使用这个软件学习了很长一段时间了,相信我对于我的英语水平不断提高也是非常有帮助的,所以我相信百词斩对于其他英语学
习者也是非常有帮助的,希望大家都能坚持下去,相信一定可以有所成就的。
通信工程师:TDD-LTE认证知识学习三

通信工程师:TDD-LTE认证知识学习三1、问答题简述系统网络架构与接口。
正确答案:(1)整个TD-LTE系统由3部分组成:核心网(EPC,EvolvedPacketCorE.、接入网(eNodeB.、用户(江南博哥)设备(UE.EPC分为三部分:MME(Mobility Management Entity,负责信令处理部分)S-GW(Serving Gateway,负责本地网络用户数据处理部分)P-GW(PDN Gateway,负责用户数据包与其他网络的处理)接入网(也称E-UTRAN)由eNodeB构成(2)网络接口S1接口:eNodeB与EPCX2接口:eNodeB之间Uu接口:eNodeB与UE2、单选?A市药品监督管理部门在日常监督检查中,发现B药店有违法经营行为,对其作出警告,限期整改,并处2万元罚款。
B药店对A药品监督管理部门作出的行政处罚行为不服,提出行政复议的时效一般为()A.15日B.60日C.3个月D.6个月正确答案:B3、多选eNB主要功能()A、无线资源管理相关的功能,包括无线承载控制、接纳控制、连接移动性管理、上/下行动态资源分配/调度等;B、IP头压缩与用户数据流加密;C、UE附着时的MME选择;D、提供到S-GW的用户面数据的路由;E、寻呼消息的调度与传输;F、系统广播信息的调度与传输;G、测量与测量报告的配臵。
正确答案:A, B, C, D, E, F4、单选TD-LTE的上下行分配方式有()种A、5B、6C、7D、8正确答案:C5、问答题简述LTE网络切换的三步曲?正确答案:(1)测量阶段,UE根据eNB下发的测量配臵消息进行相关测量,并将测量结果上报给eNB。
(2)决策阶段,eNB根据UE上报的测量结果进行评估,决定是否触发切换。
(3)执行阶段,eNB根据决策结果,控制UE切换到目标小区,由UE完成切换。
6、单选LTE系统下行多址方式()A、TDMAB、CDMAC、OFDMAD、SC-FDMA正确答案:C7、多选LAI(Location Area Identification--位臵区)是由什么组成的()A、MCCB、MNCC、LACD、CI正确答案:A, B, C8、单选下列选项哪个不是形成导频污染的主要原因()A、基站选址B、小区布局C、天线选型D、天线挂高正确答案:C9、单选以下哪个信道不采用功率控制()A、PBCHB、PDCCHC、PCFICHD、PDSCH正确答案:A10、单选BBU和RRU通过()传输。
数控加工实习报告(最新8篇)

数控加工实习报告(最新8篇)数控加工实习报告篇一一、实习目的和意义数控加工是一种高精度、高效率的加工工艺,具有广泛的应用前景。
通过实习,我旨在了解数控加工的基本原理和技术,掌握数控机床的操作方法,提高自己的实际操作能力和技术水平。
二、实习内容和方法1. 学习数控加工的基本原理和技术:通过阅读相关资料和参观数控加工车间,了解数控加工的基本原理和技术要点,包括数控机床的结构、工作原理、编程方法和加工工艺等。
2. 学习数控机床的操作方法:通过实际操作数控机床,学习数控机床的操作方法,包括开机、关机、切换模式、选择刀具、设置参数等。
3. 编写数控程序并进行加工实验:根据实际加工要求,编写数控程序,并通过数控机床进行加工实验,观察加工过程和结果,分析加工误差和改进措施。
三、实习过程和成果1. 学习数控加工的基本原理和技术:通过阅读相关资料和参观数控加工车间,我对数控加工的基本原理和技术有了初步的了解,包括数控机床的结构、工作原理、编程方法和加工工艺等。
2. 学习数控机床的操作方法:在实习期间,我通过实际操作数控机床,学习了数控机床的操作方法,包括开机、关机、切换模式、选择刀具、设置参数等。
通过反复练习,我逐渐掌握了数控机床的操作技巧。
3. 编写数控程序并进行加工实验:根据实际加工要求,我编写了一段简单的。
数控程序,并通过数控机床进行了加工实验。
在加工过程中,我仔细观察了加工过程和结果,并记录了加工误差。
通过对加工误差的分析,我找出了改进措施,并进行了第二次加工实验。
经过多次试验和改进,我最终取得了满意的加工结果。
四、实习心得和体会通过这次数控加工实习,我深刻认识到数控加工的重要性和广泛应用的前景。
数控加工不仅能够提高加工精度和效率,还能够减少人工操作的错误和劳动强度。
在实习过程中,我不仅学到了专业知识和技能,还培养了团队合作和解决问题的能力。
通过与同学和老师的交流和合作,我解决了许多实际操作中遇到的问题,并取得了良好的实习成果。
《2024年基于机器学习的切换优化研究》范文

《基于机器学习的切换优化研究》篇一一、引言在现代社会,切换优化技术在无线通信网络中发挥着越来越重要的作用。
为了解决传统切换方法中存在的问题,例如高切换率、高时延等,研究人员逐渐开始关注基于机器学习的切换优化方法。
本文将详细介绍基于机器学习的切换优化技术的研究背景、意义、目的和结构安排。
二、研究背景与意义随着无线通信网络的快速发展,切换优化技术已成为提高网络性能的关键技术之一。
传统的切换方法通常依赖于人工设置的阈值和规则,难以适应复杂的网络环境和用户需求。
因此,研究基于机器学习的切换优化技术具有重要的意义。
首先,机器学习技术可以自动学习和调整切换策略,以适应不同的网络环境和用户需求。
其次,通过机器学习技术,可以有效地降低切换过程中的时延和丢包率,提高网络性能。
此外,基于机器学习的切换优化技术还具有以下优点:能够根据网络状况动态调整参数、具备更强的泛化能力等。
因此,本研究具有重要的研究价值和应用前景。
三、研究目的本研究的主要目的是提出一种基于机器学习的切换优化方法,以解决传统切换方法中存在的问题。
具体来说,本研究将研究以下内容:1. 分析现有切换方法的问题和挑战;2. 探讨机器学习技术在切换优化中的应用;3. 设计并实现基于机器学习的切换优化算法;4. 通过实验验证算法的可行性和性能。
四、研究方法与实验结果本研究采用机器学习算法对切换过程进行建模和优化。
首先,收集了大量的切换数据集进行训练和测试;其次,设计了一种基于强化学习的切换优化算法;最后,通过实验验证了算法的可行性和性能。
实验结果表明,基于机器学习的切换优化算法可以有效地降低切换过程中的时延和丢包率,提高网络性能。
与传统的切换方法相比,该算法具有更高的灵活性和适应性。
此外,该算法还具有较低的复杂度和计算成本,适用于实时性要求较高的场景。
五、算法设计与实现本研究设计了一种基于强化学习的切换优化算法。
该算法通过学习历史切换数据来预测未来的网络状态和用户需求,并自动调整切换策略以适应不同的网络环境和用户需求。
VAT阀参数设置、自整定、学习

VAT阀参数设置、蝶阀自整定,学习1.进入VAT软件:VAT通讯线一端接VAT阀的service端口一端接电脑RS232串口,当连接正常后VAT软件会自动识别,点击Enter CPA 进入软件,软件界面如下图所示。
2.Valve选项中的Setup的设置:首先切换至LOCAL模式,点击Valve中的Setup将Valve Speed的参数值设置为500,点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
3.Sensor选项中的Setup的设置:点击Sensor中的Setup将Unit的参数值设置为Pa,Full scale的参数设置为1333。
点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
4.Interface选项中的Setup的设置:点击Interface中的Setup将Interface Settings中的参数Baud Rate设置为38400,Parity设置为odd,Data Length设置为7,Stop Bits设置为1,Duplex Mode设置为Half Duplex,Device Address设置为10。
Communication Settings中的Position Range设置为0~1000,Pressure Range设置为0~10000。
点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
5.CPA选项中的Settings的设置:点击CPA中的Settings将Pressure Indicator的参数值设置为Pa。
点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
6.设置完成后切换至Remote模式,界面入下图所示。
VAT阀自整定、学习方法一、1.将各个气体流量和气体阀门设置为工艺时同样的数值和状态,保持真空泵和主慢抽阀打开状态,VAT自身状态不用设置。
保持该状态直到VAT阀门自整定完成。
2.按照以上的方法连接到VAT,切换到Local模式,在左侧菜单栏的Press Control的子菜单Learn即为自整定界面,各项参数不用设置。
分数阶线性时滞切换系统PDα型迭代学习控制

«*+|(0 = « * ( 0 + ^ * ( 0 + r D^ a)(0
收稿日期:2018-11-29;修 回 日 期 :2019-10-17 基金项目:国家自然科学基金青年项目(61201323);徐州市科技项目(K C 18013) 作 者 简介:张克军(丨9 7 9 - ) , 男,山东临沂人,博士,副 教 授 ,主要从事智能控制、迭代学习控制等方面的教学与科研工
在 实 际 系 统 中 ,具 有 重 复 运 行 属 性 的 切 换 系 统 可 运 用 迭 代 学 习 控 制 进 行 精 确 跟 踪 。例 如 ,交通控 制 系 统 实 际 上 就 是 一 个 切 换 系 统 ,它在运行过程中 具 有 较 强 的 重 复 性 。在 每 一 天 同 时 刻 的 交 通 流 都 是 很 接 近 的 ,这 就 可 以 解 释 在 同 样 时 间 段 经 常 发 生 交 通 堵 塞 现 象 。当前,关于切换系统的迭代学习控 制问题的研宄才刚刚起步。文献[24]将 D 型迭代学 习控制算法应用于一类线性连续切换系统,并分析 了 算 法 的 收 敛 性 。随 后 ,文 献 [25]提出 了 非 线 性 连 续 切 换 系 统 的 D 型迭代学习控制算法,并讨论了 算 法 的 收 敛 条 件 。研 宄 者 对 离 散 切 换 系 统 也 有 一 定 研宄 ,如文献[26]针对一类线性离散切换系统,借 助 A 范数,讨论了 D 型迭代学习控制算法在迭代域 的 收 敛 条 件 。而 文 献 [27]利 用 超 向 量 方 法 ,对线性 离散切换系统P 型迭代学习控制算法的收敛条件 进 行 了 讨 论 。上 述 文 献 仅 仅 对 算 法 的 收 敛 性 进 行 讨 论 ,却对算法的鲁棒性没有进行详细分析。因此, 文 献 [28,29]针 对 一 类 线 性 时 不 变 离 散 切 换 系 统 ,借 助超向量方法,在迭代域内分别分析了 P 型 和 P D 型 迭 代 学 习 控 制 算 法 的 收 敛 性 和 鲁 棒 性 。类似的 文 献还有文献[30,31]。
安川G7变频器参数学习
武汉港迪公司技术中心 2004/1/29
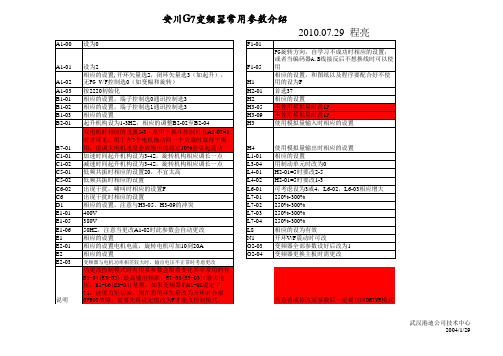
安川G7变频器常用参数介绍 2010.07.29 程亮
A1-00 设为0 F1-01 PG旋转方向,自学习不成功时相应的设置, 或者当编码器A.B线接反后不想换线时可以使 用 相应的设置,和图纸以及程序要配合好不使 用的设为F 首选37 相应的设置 不使用模拟量时改1F 不使用模拟量时改1F 使用模拟量输入时相应的设置 A1-01 A1-02 A1-03 B1-01 B1-02 B1-03 B2-01 设为2 相应的设置,开环矢量选2,闭环矢量选3(如起升), 无PG V/F控制选0(如变幅和旋转) 按2220初始化 相应的设置,端子控制选0通讯控制选3 相应的设置,端子控制选1通讯控制选3 相应的设置 起升机构设为1-3HZ,相应的调整B2-02至B2-04 双电机时相应的设置5-8,常用于抓斗控制只有A1-02=3 时才可见,用于在2个电机拖动同一个负载时取得平衡 用,值调大电机速度会放慢但值超过10%会引起震动 加速时间起升机构设为3-4S,旋转机构相应调长一点 减速时间起升机构设为3-4S,旋转机构相应调长一点 低频共振时相应的设置20,不宜太高 低频共振时相应的设置 出现干扰,啸叫时相应的设置F 出现干扰时相应的设置 相应的设置,注意与H3-05、H3-09的冲突 400V 380V 50HZ,注意当更改A1-02时此参数会自动更改 相应的设置 相应的设置电机电流,旋转电机可加10到20A 相应的设置
武汉港迪公司技术中心2004129a100f101a101f105a102h1a103h201b101h2相应的设置b102h305b103相应的设置h309b201h3使用模拟量输入时相应的设置b701h4使用模拟量输出时相应的设置c101l101相应的设置c102l304c501l401c502低频共振时相应的设置l402c602l601c6出现干扰时相应的设置l701250300d1l702250300e101400vl703250300e105380vl704250300e106l8相应的设为有效e1相应的设置n1e201o203e2相应的设置o204变频器更换主板时需更改e203变频器与电机功率相差较大时输出电压不正常时考虑更改说明安川g7变频器常用参数介绍20100729设为0设为2pg旋转方向自学习不成功时相应的设置或者当编码器ab线接反后不想换线时可以使用相应的设置开环矢量选2闭环矢量选3如起升无pgvf控制选相应的设置和图纸以及程序要配合好不使用的设为f按2220初始化首选37相应的设置端子控制选0通讯控制选3相应的设置端子控制选1通讯控制选3不使用模拟量时改1f不使用模拟量时改1f起升机构设为13hz相应的调整b202至b204双电机时相应的设置58常用于抓斗控制只有a1023时才可见用于在2个电机拖动同一个负载时取得平衡用值调大电机速度会放慢但值超过10会引起震动加速时间起升机构设为34s旋转机构相应调长一点减速时间起升机构设为34s旋转机构相应调长一点用制动单元时改为0低频共振时相应的设置20不宜太高h2015时要改25h2015时要改13出现干扰啸叫时相应的设置f可考虑设为3或4l602l603相应增大相应的设置注意与h305h309的冲突50hz注意当更改a102时此参数会自动更改开环vf震动时可改相应的设置电机电流旋转电机可加10到20a变频器全部参数设好后改为1当更改控制模式时有很多参数会跟着变化其中常用的有e104e302
各种变频器电机自学习操作步骤手册

安川 615G5/676GL5-JJ 变频器电机自学习操作步骤
(1) 用葫芦吊起轿箱,把钢丝绳从曳引轮上取下,使电机完全 脱离负载,确认即使电机转动也无任何危险.
(2) 确认旋转编码器安装完好 (3) 将 A1-02=02 设定到 A1-02=03(将开环转闭环),具体操作如下
(7)自学习可能会不成功,同时编程器会有错误指示,可能的原因
及处理方法如下:解决问题后重新输入参数,再做一编.
故障显
原 因 对策
示
Motor speed
马达速度 检查设定及电机接线,是否接了慢车 绕组
PG Direction
旋转方向 改变 F1-05(设定 0 或 1)
I Dirt 输出开路 压紧运行接触器
DATA/ENTER 键进入该级菜单,然后通过∧键进入 F1-05 菜单 中,改变 F1-05 的值(0 或 1)按 DATA/ENTER 键确认.
(5) 打开抱闸
(6) 进入自学习菜单 Auto-Tunning,然后输入电机数据(按电 机铭牌值): Rated Voltage(额定电压)、Rated Current(额 定电流)、Rated Frequency(额定频率)、Motor Speed(额 定转速)、Number of poles(电机极数)、PG Pulses(编码器 分周比);其他参数不必理会. 当显示
手动按变频器 MENU 键,通过 MENU 键切换到 Program 菜单 中,按 DATA/ENTER,进入该级菜单,按动∧键进入 A1-02 按 DATA/ENTER 键进入该级菜单,然后通过∧键使 A1-02=03, 按 DATA/ENTER 键确认.
(4) 确认旋转编码器旋转方向:开慢车,闭环运行时,如 PG 方向相 反,电机转速会很慢,并可能伴随震动.当旋转编码器方向相 反时,在变成方式(Program 下)改变 F1-05(旋转编码器相序). 具体操作步骤如下:
七参数坐标转换范文
七参数坐标转换范文
以下是七个参数的介绍:
1.三个平移参数:
平移参数用于修正两个坐标系之间的平移差异。
通常,在实际测量中
会发现两个坐标系的原点位置不同,因此需要通过平移参数对其进行修正。
2.三个旋转参数:
旋转参数用于修正两个坐标系之间的旋转差异。
通常,在不同的坐标
系中,坐标轴的方向和角度可能不同,因此通过旋转参数来修正这些差异。
3.一个尺度因子参数:
尺度因子参数用于修正两个坐标系之间的比例差异。
不同的坐标系可
能采用不同的度量单位和比例尺,因此需要通过尺度因子参数来进行转换。
1.收集需要转换的坐标数据:包括大地坐标系和平面投影坐标系的测
量数据。
2.计算坐标差异:通过比较两个坐标系之间的差异,得到需要转换的
平移、旋转和尺度变换参数的初值。
3.求解参数:使用最小二乘法或其他数学方法,求解出误差最小的最
优参数值。
4.修正坐标差异:根据计算得到的参数值,修正坐标差异,实现坐标
的转换。
5.检验转换结果:对转换后的坐标数据进行验证,确保转换结果的准
确性。
七参数坐标转换是一种经典的坐标转换方法,在地理测量和地图制图中得到广泛应用。
它可以实现不同坐标系之间的无畸变、无失真的转换,为地理数据的整合和分析提供了坚实的基础。
不过,需要注意的是,七参数坐标转换仅适用于小范围的坐标转换,对于大范围的转换可能存在较大的误差。
因此,在实际应用中,需要根据具体情况选择合适的坐标转换方法。
ojt在岗培训

ojt在岗培训篇一:OJT培训计划篇一:ojt阶段培训详细计划ojt阶段培训详细计划第一周学习目标(熟练使用鼎立路测软件,能独立完成测试,熟练使用td优化工具)(信令流程每天都要看、都要记)1、路测软件各个窗口熟悉、鼎立路测软件设备连接、各种业务测试、实际操作练习、了解熟悉路测端信令流程(起呼,切换等)2、详细了解路测软件窗口里面的各个无线参数代表的含义3、鼎立基站数据库制作4、熟练使用td优化工具(mapinfor, mapinfor 插件,google earth等)能够独立熟练的完成图层的制作5、熟练使用td优化工具(mapinfor, mapinfor 插件,google earth等)能够独立熟练的完成图层的制作第二周学习目标(精确找出路测log问题点、独立完成单站验证)(信令流程每天都要看、都要记)1、熟练背诵路测端信令流程(起呼,切换等)2、站点状态检查, 配置数据检查, 测试路线的选择3、频率检查, 扰码检查, lac/rac检查, 站点附近pccpch rscp…c/i检查, 业务呼叫功能检查(语音/vp/ps业务),hsdpa功能检查, 覆盖dt检查,天馈线接反检查4、独立进行单站验证测试、撰写单站验证报告5、条件允许进行单站验证实际操作第三、四周学习目标(问题点分析)(信令流程每天都要看、都要记)1. dt覆蓋分析? 弱覆盖? 越区覆盖? 上下行不平衡? 无主导小区? 导频污染问题分析? 天馈线接反问题2. 语音视频接入问题? cn未发paging message? ue 发生小区重选? uppch开环功率设置问题或者uppch干扰问题? 基站故障以及bug引起的无线资源建立失败问题? 准入拒绝系统资源不足? ue 回应 rb 建立失败造成的 rab 建立失败(配置不支持以及协议错误等原因值得失败)? 下行覆盖引起的情况表现为ue无法收到 rb 建立命令3. 语音视频掉话? 覆盖差问题? 邻区漏配? 下行干扰问题? 上行干扰问题? 异常掉话? 跨rnc 切换掉话4. 邻区问题? 邻区漏配? 跨rnc邻区数据配置错误5. 结合信令分析,对路测log找出异常时间点,并描述现象,问题归类;尝试撰写路测分析报告。
CDMA2000-1X&EVDO学习重点摘要

CDMA搜索过程对各种不同导频集,手机采用不同的搜索策略。
对于激活集与候选集,采用的搜索频度很高,相邻集搜索频度次之,对剩余集搜索最慢。
整个导频搜索的时间安排见下图所示:手机搜索速度设搜索窗设置为5,8,9.激活集、侯选集、相邻集中导频分别为3,2,20,Pilot_INC为4时,搜索一遍激活集时间约为0.09秒,搜索一遍相邻集时间约为1.34秒,搜索一遍剩余集时间约为2.4分钟。
另有资料显示,手机搜索器的搜索速度最大为4800chips/s,对于活动/侯选导频和相邻导频集而言,网络设计者应满足如下对搜索速度的要求:1、每秒时间内,手机搜索器应至少搜索活动/侯选导频集4-6次;2、相邻导频集应至少在1.5秒内搜索一次。
R.A应用层引入了CDMA2000系统交叉寻呼和多RIP流等多种新业务应用,使得1xEv-DO 技术从R0片本侧重于提供高速460015*********数据传送平台,向提供多样性业务平台转移,对运营商和用户更具吸引力。
新增多流分组应用(Multiple-flow Packet Application):支持单用户多个业务,每个业务可以有多个RLP流,并对每个RLP流单独进行控制。
新增短信数据突发应用(Data over Signaling):类似于CDMA2000短数据突发机制,利用1xEv-DO接入信道或控制信道来传送短数据分组。
新增交叉寻呼应用(CDMA2000 Circuit Service Notification Application):终端在监听1xEv-DO 系统期间,可以收到1x Ev-DO系统下发的CDMA2000 1x寻呼或短消息等。
不需要终端在两网之间进行频繁切换,有利于降低网络切换所需开销,延长手机待机时间,并实现对CDMA2000 1x语音呼叫的快速响应。
新增多模终端能力查询应用(Multimode Capability Discovery Application):用于终端上电初始化时系统与终端的多模能力协商,可以支持并发公共信道收发、并发专用信道收发、混合终端操作和接收分集等多种工作模式。
华为功控、切换学习总结及优化建议
华为功控、切换学习总结及优化建议一、概述九月初博罗华为置换后,惠州博罗、龙门均属华为设备。
置换后DT指标及用户投诉均受影响,受影响原因是多方面的,这里主要对下行功控及切换进行分析。
华为作为新引进设备,其功控及切换机制跟爱立信有较大区别,对我们来说华为参数设置缺乏经验值。
因此,通过查阅华为相关资料,对华为功控、切换部分功能的疑难点进行学习总结,希望能给刚接触华为设备的同事作为入门参考。
同时学以致用,尝试对现网存在的一些问题进行分析及优化。
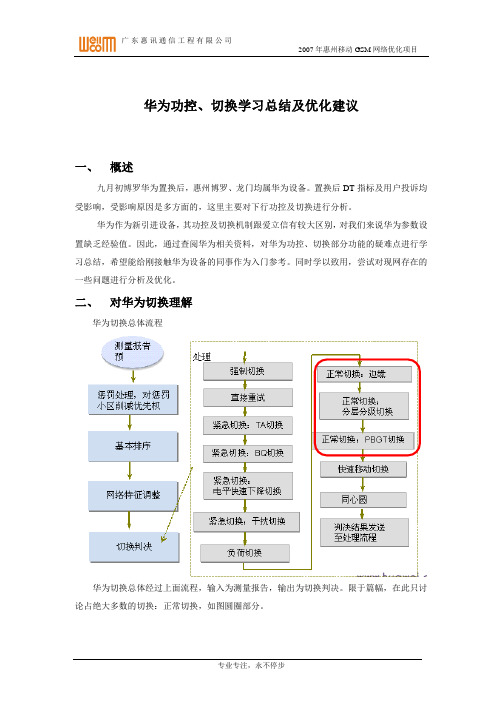
二、对华为切换理解华为切换总体流程华为切换总体经过上面流程,输入为测量报告,输出为切换判决。
限于篇幅,在此只讨论占绝大多数的切换:正常切换,如图圆圈部分。
1) 边缘切换边缘切换涉及参数如下:●边缘切换算法允许●上行链路边缘切换门限(dBm)●下行链路边缘切换门限(dBm)●边缘切换统计时间(秒)●边缘切换持续时间(秒)当手机或基站接收到信号强度超出上、下行链路边缘切换门限时,假如在边缘切换统计时间内有边缘切换持续时间服务小区电平持续低于边缘切换门限,则触发边缘切换。
现网参数设置:上行链路边缘切换门限(dBm)=-95下行链路边缘切换门限(dBm)=-87边缘切换统计时间(秒)=3边缘切换持续时间(秒)=2个人对边缘切换理解:假如在切换统计时间3秒内,有2秒的时间下行信号小于-87 dBm(或者上行信号小于―95 dBm),系统将要求切换到排队最前的邻小区(要求目标小区的电平高于服务小区,并且至少高于一个小区间切换磁滞)。
通过改变边缘切换门限可以控制小区覆盖范围,这个功能可应用于话务均衡。
由于下行链路边缘切换门限(dBm)=-87,按照惠州现网覆盖情况,低于-87dBm的区域较少,触动边缘切换应是上行占多数,且华为的话统中对上行边缘切换的统计是上行和下行都满足了边缘切换触发条件时优先统计为上行边缘切换,所以话务统计上也应该是上行高于下行切换。
边缘切换相关优化铁路切换优化:由于火车的屏蔽作用,车厢内的信号强度应该边缘切换门限徘徊,因此铁路DT测试时应该是边缘切换占多数。
LTE基本信令流程学习之切换信令详解

切换步骤 切换信令 LTE 切换过程中的数据切换
实用文档
切换判决准备 - 测控及测报
➢ 基站根据不同的需要利用移动性管理算法给UE下发不同种类的测量任务,
在RRC重配消息中携带measConfig信元给UE下发测量配置。
➢ UE收到配置后,对测量对象实施测量,并用测量上报标准进行结果评估, 当评估测量结果满足上报标准后向基站发送相应的测量报告
source eNB
HANDOVER CANCEL
MME
HANDOVER CANCEL ACKNOWLEDGE
条件:
➢ 源eNB仍没有触发执行Uu口的切换过程。
➢ 已经触发执行切换后,UE返回源eNB,并通过向eNB传送RRC消息指明UE将
源eNB视为服务eNB。
实用文档
UE
RNC
eNB
MME
SGSN
5、Handover request ACK
7、 Handover command 8、 RRC connection reconfiguration
9、eNB Status Transfer
6、Forward relocation request response
10、PDCP Status Transfer
11. 目标eNB发送UE context release 消息给源实eN用B,文档通知源eNB已经 切换成功,触发源eNB释放资源。
主要IE:
➢ UE-X2AP-ID \ ECGI \ GUMMEI ➢ Cause:原因 ➢ UE-contextInformation:UE上下文信息 ➢ UE-HistoryInformation:UE历史信息 ➢ TraceActivation:
《基于机器学习的切换分类及切换控制参数优化》范文

《基于机器学习的切换分类及切换控制参数优化》篇一一、引言在现代自动化和智能化系统中,切换控制是一项至关重要的技术。
在各种应用场景中,如智能交通系统、智能家居、工业自动化等,都需要对不同状态进行切换控制。
为了实现高效、准确的切换控制,需要采用先进的算法和优化技术。
本文将介绍基于机器学习的切换分类及切换控制参数优化的研究方法。
二、背景及意义在许多实际场景中,系统状态可能随时发生变化,需要根据当前状态进行适当的切换控制。
传统的切换控制方法往往依赖于人工设定阈值或规则,但这种方法往往难以适应复杂多变的实际环境。
因此,需要一种能够自动学习和适应环境变化的切换控制方法。
基于机器学习的切换分类及控制参数优化技术可以有效地解决这一问题。
三、相关工作在机器学习中,许多分类算法可用于实现切换分类,如支持向量机(SVM)、神经网络等。
在切换控制参数优化方面,可以借鉴优化算法的思想,如梯度下降法、遗传算法等。
这些算法可以自动调整控制参数,以实现更好的切换效果。
然而,这些算法在具体应用中往往面临过拟合、实时性等问题。
因此,本文将研究如何将深度学习技术与传统优化算法相结合,以实现更高效、准确的切换分类及控制参数优化。
四、方法本文提出了一种基于深度学习的切换分类及切换控制参数优化方法。
首先,采用深度神经网络(DNN)进行切换分类。
通过训练DNN模型,使其能够根据系统状态自动进行分类。
其次,采用遗传算法对切换控制参数进行优化。
通过调整遗传算法的适应度函数和选择策略,使算法能够根据实际需求自动调整控制参数,以实现更好的切换效果。
五、实验与分析为了验证本文所提方法的有效性,我们在多个实际场景中进行了实验。
实验结果表明,基于深度学习的切换分类方法能够准确地识别系统状态并进行分类。
同时,采用遗传算法对切换控制参数进行优化后,系统的切换效果得到了显著提升。
与传统的切换控制方法相比,本文所提方法具有更高的准确性和鲁棒性。
六、讨论与展望本文所提方法在许多实际应用中都取得了良好的效果。
《基于机器学习的切换分类及切换控制参数优化》范文

《基于机器学习的切换分类及切换控制参数优化》篇一一、引言随着人工智能技术的飞速发展,机器学习算法在各个领域得到了广泛应用。
其中,切换分类和切换控制参数优化是机器学习在控制系统中的重要应用之一。
本文旨在探讨基于机器学习的切换分类方法以及切换控制参数的优化策略,以提高系统的性能和稳定性。
二、切换分类的背景与意义切换分类是一种根据不同条件将系统状态进行分类的方法,广泛应用于各种控制系统中。
传统的切换分类方法往往依赖于人工设定阈值或规则,难以适应复杂多变的实际环境。
而基于机器学习的切换分类方法可以通过学习大量数据,自动识别系统状态的分布和变化规律,提高分类的准确性和适应性。
三、基于机器学习的切换分类方法3.1 数据准备与预处理在进行切换分类之前,需要收集大量系统运行数据,包括传感器数据、控制信号等。
然后对数据进行清洗、去噪和归一化等预处理操作,以提高数据的可靠性和适用性。
3.2 特征提取与表示在数据预处理的基础上,提取出对系统状态分类有重要影响的特征。
这些特征可以包括时域特征、频域特征等,通过合适的表示方法将它们转化为机器学习算法可以处理的输入形式。
3.3 训练与分类模型构建选择合适的机器学习算法(如支持向量机、神经网络等),利用提取的特征训练分类模型。
在训练过程中,通过调整算法参数和模型结构,优化模型的性能。
训练完成后,得到一个能够根据系统状态进行准确分类的模型。
四、切换控制参数的优化策略4.1 参数初始化与评价根据系统要求和经验值,设定一组初始的切换控制参数。
然后通过仿真或实际运行测试,评价参数对系统性能的影响。
这一步的目的是为了了解参数的初步范围和趋势。
4.2 基于机器学习的参数优化方法利用机器学习算法对切换控制参数进行优化。
具体而言,可以将参数作为输入特征,将系统性能指标作为输出目标,构建一个回归或优化模型。
通过调整模型参数和结构,找到一组能够使系统性能达到最优的参数值。
4.3 实时调整与反馈机制在实际运行过程中,根据系统状态和性能指标实时调整切换控制参数。
《基于机器学习的切换分类及切换控制参数优化》范文

《基于机器学习的切换分类及切换控制参数优化》篇一一、引言在现代自动化和智能化系统中,切换控制参数的优化是提高系统性能和效率的关键因素之一。
随着机器学习技术的发展,越来越多的研究开始关注如何将这一技术应用于切换分类及切换控制参数的优化中。
本文旨在探讨基于机器学习的切换分类方法以及如何利用机器学习技术对切换控制参数进行优化,以提高系统的整体性能。
二、背景与相关研究在过去的几十年里,切换系统在许多领域得到了广泛的应用,如通信网络、电力系统、航空航天等。
切换控制参数的优化对于提高系统的稳定性和性能至关重要。
传统的切换控制参数优化方法通常依赖于专家经验和试错法,这些方法往往效率低下且难以应对复杂多变的系统环境。
近年来,随着机器学习技术的发展,越来越多的研究者开始探索如何将这一技术应用于切换控制参数的优化中。
三、基于机器学习的切换分类方法基于机器学习的切换分类方法主要通过训练分类器来实现对系统状态的准确判断,从而为切换控制提供依据。
首先,需要收集大量的系统运行数据,并利用这些数据训练出具有较高准确率的分类器。
在训练过程中,需要选择合适的机器学习算法,如支持向量机、神经网络等。
通过训练出的分类器,可以实现对系统状态的准确判断,从而为切换控制提供可靠的依据。
四、切换控制参数的优化在得到准确的系统状态分类后,可以利用机器学习技术对切换控制参数进行优化。
具体而言,可以通过以下步骤实现:1. 确定优化目标:根据系统的实际需求,确定优化目标,如最大化系统的稳定性能、最小化切换次数等。
2. 选择合适的机器学习算法:根据优化目标和系统特性,选择合适的机器学习算法,如遗传算法、粒子群算法等。
3. 构建优化模型:将切换控制参数作为模型的输入,将优化目标作为模型的输出,构建出优化模型。
4. 训练和测试模型:利用历史数据对模型进行训练和测试,确保模型的准确性和可靠性。
5. 调整控制参数:根据模型的输出结果,调整切换控制参数,以实现优化目标。
《基于机器学习的切换分类及切换控制参数优化》范文
《基于机器学习的切换分类及切换控制参数优化》篇一一、引言随着人工智能和机器学习技术的快速发展,切换分类和切换控制参数优化在许多领域中变得越来越重要。
切换分类是指根据不同的情况和条件,选择最合适的切换策略或模式进行分类处理。
而切换控制参数优化则是通过机器学习算法,对切换过程中的参数进行优化,以提高系统的性能和效率。
本文旨在探讨基于机器学习的切换分类及切换控制参数优化的相关技术和方法,并对其在实际应用中的效果进行评估。
二、切换分类的机器学习技术应用1. 常见算法与技术在切换分类中,常用的机器学习算法包括决策树、支持向量机(SVM)、随机森林等。
这些算法可以根据不同的特征和条件,对切换策略或模式进行分类。
例如,在通信系统中,可以根据信号质量、用户需求等因素,选择不同的切换策略,如宏小区切换、微小区切换等。
通过训练数据集,可以确定每种特征下最优的切换策略,从而提高通信系统的性能。
2. 案例分析以智能家居系统为例,系统中的设备可能需要根据不同的场景和需求进行切换。
例如,在客厅中,灯光、空调等设备需要根据人的活动情况、时间等因素进行智能切换。
通过机器学习算法,我们可以对各种场景和需求进行分类,并确定每种场景下最优的设备切换策略。
这样,系统可以根据实时数据自动调整设备状态,提高家居的舒适度和节能性。
三、切换控制参数的机器学习优化1. 常见算法与技术在切换控制参数的优化中,常用的机器学习算法包括神经网络、遗传算法等。
这些算法可以通过对历史数据的分析,找出最优的参数组合,从而提高系统的性能和效率。
例如,在交通信号灯控制系统中,可以通过神经网络算法对交通流量、车速等因素进行分析,找出最优的红绿灯配时方案。
这样,可以减少交通拥堵和交通事故的发生率,提高道路的通行效率。
2. 案例分析以制造业生产线为例,生产线的运行过程中涉及到许多参数的设置和控制。
传统的做法是通过工程师的经验进行调整,但这种方式效率较低且容易出错。
通过机器学习算法,我们可以对历史生产数据进行分析,找出最优的参数组合。
VAT阀参数设置、自整定、学习
VAT阀参数设置、蝶阀自整定,学习1.进入VAT软件:VAT通讯线一端接VAT阀的service端口一端接电脑RS232串口,当连接正常后VAT软件会自动识别,点击Enter CPA 进入软件,软件界面如下图所示。
2.Valve选项中的Setup的设置:首先切换至LOCAL模式,点击Valve中的Setup将Valve Speed的参数值设置为500,点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
3.Sensor选项中的Setup的设置:点击Sensor中的Setup将Unit的参数值设置为Pa,Full scale的参数设置为1333。
点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
4.Interface选项中的Setup的设置:点击Interface中的Setup将Interface Settings中的参数Baud Rate设置为38400,Parity设置为odd,Data Length设置为7,Stop Bits设置为1,Duplex Mode设置为Half Duplex,Device Address设置为10。
Communication Settings中的Position Range设置为0~1000,Pressure Range设置为0~10000。
点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
5.CPA选项中的Settings的设置:点击CPA中的Settings将Pressure Indicator的参数值设置为Pa。
点击保存按钮(Save)完成操作,退出即可,软件界面如下图所示。
6.设置完成后切换至Remote模式,界面入下图所示。
VAT阀自整定、学习方法一、1.将各个气体流量和气体阀门设置为工艺时同样的数值和状态,保持真空泵和主慢抽阀打开状态,VAT自身状态不用设置。
保持该状态直到VAT阀门自整定完成。
2.按照以上的方法连接到VAT,切换到Local模式,在左侧菜单栏的Press Control的子菜单Learn即为自整定界面,各项参数不用设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
修改同频切换参数组(MOD INTRAFREQHOGROUP) 命令功能
该命令用于修改同频切换参数组。
参数说明
修改EUTRAN同频邻区关系(MOD EUTRANINTRAFREQNCELL) 命令功能
该命令用于修改EUTRAN同频邻区关系的数据记录。
注意事项
无。
参数说明
使用实例
1、修改EUTRAN同频邻区关系,本地小区标识为0,移动国家码为“460”,移动网络码为
“20”,基站标识为255,小区标识为2,小区偏移量为dB-12,小区偏置为dB-24,禁止切换标识为“PERMIT_HO_ENUM”,禁止删除标识为“PERMIT_RMV_ENUM”:
MOD EUTRANINTRAFREQNCELL: LocalCellId=0, Mcc="460", Mnc="20", eNodeBId=255, CellId=2, CellIndividualOffset=dB-12, CellQoffset=dB-24,
NoHoFlag=PERMIT_HO_ENUM, NoRmvFlag=PERMIT_RMV_ENUM;
2、修改EUTRAN同频邻区关系,本地小区标识为0,移动国家码为“460”,移动网络码为
“20”,基站标识为255,小区标识为1,小区偏移量为dB6,小区偏置为dB3,禁止切换标识为“FORBID_HO_ENUM”,禁止删除标识为“FORBID_RMV_ENUM”:
MOD EUTRANINTRAFREQNCELL: LocalCellId=0, Mcc="460", Mnc="20", eNodeBId=255, CellId=1, CellIndividualOffset=dB6, CellQoffset=dB3, NoHoFlag=FORBID_HO_ENUM, NoRmvFlag=FORBID_RMV_ENUM;
父主题:eNodeB MML命令参考
华为专有和保密信息
版权所有© 华为技术有限公司。