lecture 2机械振动英文课件
《机械类专业英语》课件
This skill allows readers to quickly scan through the text to get a general understanding of the content It is often used to identify key information or main ideas
Learning significance and purpose
Learning significance and purpose
Learning significance: Mastering mechanical English is of great significance for enhancing personal competitiveness, broadening international perspectives, and promoting academic exchanges.
PPT courseware for Mechanical Professional English
• Introduction to Mechanical Professional English
• Mechanical English Vocabulary • Mechanical English Reading and
Outline
Skimming through the text to identify key information or ideas and creating an outline to organize them This helps readers understand the structure of the article and how different ideas are connected
oscillations振动英文PPT课件

12.4.3 Superposition of SHM
1) 1-d superposition with same angular frequency
A) x1 A1 cos(t 1 )
x2 A2 cos(t 2 )
x x1 x2 Acos(t )
A
A2 1
A2 2
2 A1
A2
if t=0, x=x0, v=v0 ,
then, x0 Acos , v0 A sin
A
x02
(
v0
)2
tg0
v0
x0
Caution: 0 Is decided by initial condition
Example: An object of mass 4kg is attached to a spring of k=100N.m-1. The object is given an initial velocity of v0=-5m.s-1 and an initial displacement of x0=1. Find the kinematics equation
Fg
GmM r2
'
r R,
M'
M 4 R3
4 r 3 3
r3 R3
M
3
Fg
GmM R3
r
GmM r m d 2r
R3
dt2
d 2r GM r2 0 dt 2 R3
Quiz: A tunnel through earth,the periods of particle have no relation with the length of tunnel
P 305
机械振动讲课ppt课件
t
xA co t s) (
1) t (x ,v )存在一一对应的关系;
物理意义:可据以描述物体在任一时刻的运动状态.
2)相位在 0~2π内变化,质点无相同的运动状态; 相差 2nπ(n为整数)质点运动状态全同.(周期性)
4 初相位 (t0)描述质点初始时刻的运动状态.
( 取 [ π π或][0 2 π) ]
1 振幅
A xmax
2 周期、频率
xAcots()
x xt图
A
o
Tt
T
A
2
A co (ts T [) ]
周期 T 2π
频率 1
弹簧振子周期
T 2π m k
单摆周期
T 2 l g
T 2π
角频率 2π2π
周期和频率仅与振动系 统 本身的物理性质有关
T
一是作为领导干部一定要树立正确的 权力观 和科学 的发展 观,权 力必须 为职工 群众谋 利益, 绝不能 为个人 或少数 人谋取 私利
F
o
m
x
x
Fk xma
令 2 k
m
a2x
xA co t s) (
积分常数,根据初始条件确定
d2x 2x 0 二阶常系数微分方程
dt2
2
一是作为领导干部一定要树立正确的 权力观 和科学 的发展 观,权 力必须 为职工 群众谋 利益, 绝不能 为个人 或少数 人谋取 私利
单摆
msginmt a
mlmdl2m••l
t t 时
o
A
t
xAcots()
以 o为 原点的 旋转
矢量A在 x
x 轴上的投影 点的运动为
简谐运动.
《机械类专业英语》课件
Summary
Mastering common sentence patterns and grammar is the key to accurately expressing concepts in the field of machinery.
Detailed description
There are some specific sentence patterns and grammatical structures in Mechanical English, such as passive voice and complex sentence patterns. Learners need to be familiar with these sentence patterns and grammar to ensure that they can accurately and fluently express their meaning in writing and speaking.
Course objectives and learning significanceCourse objective: By studying mechanical engineering English, students will be able to master professional English vocabulary, terminology, and expressions in the field of mechanical engineering, and improve their reading, writing, translation, and communication skills.Learning significance: Students with mechanical English proficiency can better adapt to international demands, enhance their competitiveness in the field of mechanical engineering, and also contribute to promoting technical exchange and cooperation in the field of mechanical engineering.
最新机械振动的PPT幻灯片

Last modified: August 8, 2004
本课程开设学校、院系、教师
复旦大学新闻学院广告学系(专业基础课)
主讲教师: 程士安 教 授 广告系主任
部分章节讲授教师:
谢 静 博 士 副教授 (媒介策略) 李华强 硕 士 助 教 (创意策略)
响应由两部分组成:①指数衰减因子;②正弦函数 亚临界阻尼系统自由运动具有振动特征,且振幅逐渐衰减
三种阻尼情况的比较:
欠阻尼是一种振幅逐渐衰减的振动 过阻尼是一种按指数规律衰减的非周期蠕动,没有振动发生 临界也是按指数规律衰减的非周期运动,但比过阻尼衰减快
些 x(t)
1.4
1
0.2
t
《广告策划与创意》
对应该初始条件的解为
xent x0cosdtx0 d nx0sindt
解还可写成如下形式
x A e n ts in d t
(16) (17) (18)
其中,
A x0 2 x0 nx0 2, d
arctan dx0 x0 nx0
亚临界阻尼( 1 )
响应: x A e n ts in d t
的影响和制约 第三部分:广告策划与营销计划、品牌建设的关系 第四部分:广告策划的运作过程 第五部分:广告策划与广告创意 第六部分:整合营销传播 —— 现代广告新概念
每一部分具体内容安排
第一部分:策划在广告活动中的地位
1、策划是广告活动科学化、规范化的标志 2、广告策划的定义、特性和基本原则 3、广告策划方案产生的基础
机械振动的PPT
机械振动的含义和分类
1.机械振动的含义?
机械振动是指在其稳定的平衡位置附近所作的往复运动. 机械振动是一种常见的物理现象,如桥梁、机床的振动. 飞机机翼的颤动,汽车运行时发动机和车体的振动等等。 2.机械振动的分类? 我们都知道,结合我们学的机械振动的有关知识,机械振 动的分类:
《机械振动教学》课件
质量块。质量块的质量大小和分布对系统的动态特性有 重要影响。
阻尼器
阻尼器是机械振动系统中的阻尼元件,它能够吸收和消耗 振动的能量,从而减小振动的幅值。常见的阻尼器有油阻 尼器、橡胶阻尼器等。
02
机械振动的数学模型
建立振动方程
确定振动系统的自由度
振动应用领域的拓展
航空航天领域
随着航空航天技术的不断发展,振动控制在航空航天领域的应用将得到进一步拓展,涉及结构健康监测、减振降噪等 方面的应用。
新能源领域
新能源领域如风能、太阳能等涉及到大量机械振动问题,未来振动控制将在新能源领域发挥重要作用,涉及风力发电 机组振动控制、太阳能电池板减振等领域。
混合控制法
总结词
结合主动和被动控制方法的优点,以提高振 动控制的效率和效果。
详细描述
混合控制法综合了主动和被动控制法的优点 ,既通过主动施加控制力来抵消原始振动, 又通过改变系统结构或增加阻尼来降低系统 的振动响应。这种方法可以实现更好的振动 控制效果,但同时也需要更高的成本和更复 杂的控制系统。
描述机械振动的物理量
描述机械振动的物理量包括位移、速度、加速度、角频率、周期等。这些物理 量在振动分析中具有重要意义,可以帮助我们了解振动的特性和规律。
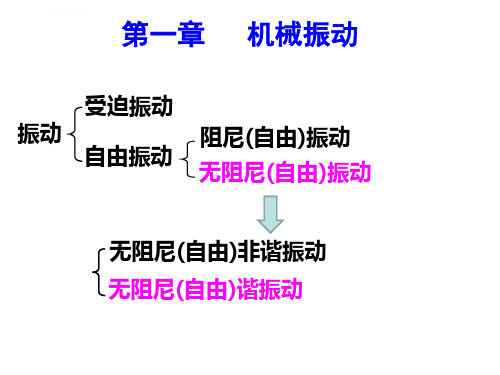
机械振动的分类
自由振动和受迫振动
根据外界对振动系统的影响,机械振动 可分为自由振动和受迫振动。自由振动 是指系统在没有外界干扰力作用下的振 动,其振动的频率和振幅只取决于系统 本身的物理性质;受迫振动则是在外界 周期性力的作用下产生的振动,其频率 和振幅取决于外界力和系统本身的物理 性质。
振型
描述系统在不同频率下的振动形态。
模态分析
通过分析系统的模态参数,了解系统的动态特性。
机械振动Part05 83页PPT文档

5.1 单自由度系统阻尼比和固有频率的确定
在振动测量中,常用 增益Lx表示振幅与基准 振幅相比增大(或减 少)的量。若以最大 振幅为基准,则在半 功率点处的增益为:
Lx1l0gX X 0 20 2 (m1a)x 1l0gX X 0 20 2 (m1a)x (d)B
5.1 单自由度系统阻尼比和固有频率的确定
当t1为 n 倍准周期时, /n就是对数衰减率。
4 2n2 2
5.1 单自由度系统阻尼比和固有频率的确定
固有频率的确定
测量第一个和第n+1个极大值出现的时间间隔 nτd ,
n
d
2 n 1
2
例1 某系统自由振动衰减曲线中相邻的四个极大值分别为:x1=11.8mm, x2=10mm, x3=8.475mm, x4=7.182mm, t4 - t1=0.6s。求系统的阻尼比和固有
X0X0max 2为曲线上的点1、2
半功率带宽
与1、2点对应的频率为 和1 , 2频率差
幅频响应曲线
21
5.1 单自由度系统阻尼比和固有频率的确定
固有频率的确定
1.
对具有粘性阻尼的系统
n
X0 n
F0 k
1
2
X0max
由半功率点的定义
X1X22F 20kk
1.334 1.594 1.885 2.232 2.657 3.197
nt1
A 1e A
Rt1
0.761 0.70 3.756
0.934 0.65 4.965
1.26 0.60 5.235
A 0.55 0.50 0.45 0.40 0.35 0.30 0.25 0.20 0.19
机械专业专业英语讲义PPT课件

9. tension/compression 10.strain/microstrain 11.cross-section 12.engineering materials 13.ferrous alloy/non-ferrous alloy 14. elastic limit 15. modulus of elasticity
一、课程性质与学习任务
1 、课程性质:是一门专业特色选修课。 2 、学习任务:掌握机制专业有关的专业术 语,能够阅读、理解、并准确翻译科技
文献。
二、课程特点及重点、难点
1 、课程特点:本课程是在大学英语及所学专业 课的基础上开设的,文章的专业术语多,句子长,且 多用被动语态,理解需与专业知识相结合。
第23页/共192页
8.static/dynamic force 9.approximate/approximation Language Points: 1.It is clear that 2.It is preferable to do 3.applicable/tractable
第24页/共192页
第14页/共192页
6.A particular form of elasticity which applies to a large range of engineering materials , at least over part of their load range , produces deformation which are proportional to the loads producing them.
eg. Pistons that are moving up are moving at different speeds than pistons that are moving down. 2)注意固定搭配。如:convert … into,consist of等。
机械英语第二课

LESSON2 GEARSGears are direct-contact bodies, operating in pairs, that transmit motion and force from one rotating shaft to another, or from a shaft to a slide( rack ), by means of successively (连续的)engaging(啮合)projections (突出的部分)called teeth.A gear having tooth elements that are straight and parallel to its axis is known as a spur gear. A spur pair can be used to connect parallel shafts only. Parallel shafts, however, can also be connected by gears of another type, and a spur gear can be mated with a gear of a different type.Since the pitch circles roll on one another, the spacing of the teeth(齿的间隙)on these circles on a mating pair(互配齿轮)must be equal. This spacing, which is known as the circular pitch(周节)and is a measure of tooth size, is the distance between corresponding(相应的)points on adjacent(邻近的)teeth, measured on the pitch circle(节圆).To prevent jamming(卡住)as a result of thermal expansion(热膨胀) to aid(有助于)lubrication(润滑), and to compensate(补偿)for unavoidable inaccuracies in manufacture(制造误差), all power-transmitting gears must have backlash. This means that on the pitch circles of a mating pair(互配), the space width(宽度)on the pinion must be slightly(稍微)greater than the tooth thickness(厚度)on the gear, and vice versa(反之亦然). On instrument gears(仪器齿轮), backlash can be eliminated(清除)by using a gear split down its middle,one half being rotated relative to(相对于)the other. A spring forces the split gear(拼合齿轮)teeth to occupy(占用)the full width of the pinion space.If an involute spur pinion were made of rubber(橡皮)and twisted uniformly(均匀地)so that the ends(端面)rotated about the axis relative to one another, the elements of the teeth, initially straight and parallel to the axis, would become helices. The pinion then in effect(实际上)would become a helical gear.Helical gears have certain advantage; for example when connecting parallel shafts they have a higher load-carrying capacity(承载能力)than spur gears with the same tooth numbers and cut with the same cutter. Because of the overlapping action(重叠作用)of the teeth, they are smoother in action(运转)and can operate(运转)at higher pitch-line velocities(速度)than spur gears. The pitch-line velocity(节线速度)is the velocity of the pitch circle. Since the teeth are inclined to(倾斜) the axis of rotation, helical gears create an axial thrust(轴向推力). If used singly(单个), this thrust must be absorbed(承受)in the shaft bearings. The thrust problem can be overcome by cutting two sets of opposed helical teeth on the same blank(毛坯件).depending on the method of manufacture, the gear may be of the continuous-tooth herringbone(连续人字形)variety (种类)or a double-helical gear with a space between the two halves(half的复数形式,半块)to permit the cutting tool to run out(通过).Helical gears can also be used to connect nonparallel, non-intersecting(不相交的)shafts at any angle to one another. Ninety degrees is the commonest angle at which such gears are used. When the shafts are parallel, the connect between the teeth on mating gears is "line contact" regardless of whether the teeth are straight or helical. When the shafts are inclined, the contact becomes "point contact". For this reason, crossed-axis(交叉轴)helical gears do not have as much load-carrying capacity as parallel-shaft helices. They are relatively(比较地)insensitive(不敏感)to misalignment(不同轴度), however, and are frequently employed in instruments(仪表)and positioning mechanisms (定位机构)where friction is the only force opposing(阻碍)their motion.As stated above, the rolling-pitch-circle concept, which applies to gears on parallel shafts, does not apply to gears on nonparallel, non-intersecting shafts. This means that a large speed ratio on one pair of gears, 100 for example, is more easily obtained when the axes are crossed than when they are parallel. With parallel shafts, the pinion pitch diameter would have to be 1/100 of the gear pitch diameter, an impractical proportion. With crossed axes, the pinion could have only one helical tooth, or thread, and be as large as necessary for adequate strength. The pinion would look like a screw, and the gear would have100 teeth.In order to achieve line contact and improve the load-carrying capacity of the crossed-axis helical gears, the gear can be made to curve partially around the pinion, in somewhat the same way that a nut envelops a screw. The result would be a cylindrical worm and gear. This results in a further increase in load-carrying capacity.Worm gears provide the simplest means of obtaining large ratios in a single pair. They are usually less efficient than parallel-shaft gears, however,because of an additional slidig movement along the teeth. Because of their similarity, the efficiency of a worm and gear depends on the same factors as the efficiency of a screw. Single-thread worms of large diameter have small lead angles and low efficiencies. For lead angles of about 15 degrees and a coefficient of friction less than 0.15, the efficiency ranges from about 55 percent to 95 percent, and the gear can drive the worm. Such units make compact speed increasers, they have been used for driving supercharges on aircraft engines. In self-locking worms, the gear cannot drive the worm, and the efficiency is less than 50 percent.For transmitting rotary motion and torque around corners, bevel gears are commonly used. The connected shafts, whose axes would intersect if extended are usually but not necessarily at right angles to one another. The pitch surfaces of bevel gears are rolling, truncated cones, and the teeth, which must be tapered in both thickness and height, are eitherstraight or curved, although curved tooth bevel gears are called spiral bevel gears, the curve of the teeth is usually a circular arc. The curvature of the teeth results in overlapping than with straight teeth. For high speeds and torques, spiral bevel gears are superior to straight bevel gears in much the same way that helical gears are superior to spur gears for connecting parallel shafts.When adapted for shafts that do not intersect, spiral bevel gear are called hypoid gears. The pitch surfaces of these gears are not rolling cones, and the ratio of their mean diameters is not equal to the speed ratio. Consequently, the pinion may have few teeth and be made as large as necessary to carry the load. This permits higher speed ratios than with intersecting axes, just as crossed-axis helices. The absence of the proportional rolling-pitch surface requirement is a benefit.Hypoid gears are used on automobiles to connect the drive shaft to the rear axles. The axis of the pinion on the drive shaft is below the gear axis, which permits lowering on the engine and the center of gravity of the vehicle. Since the shafts do not intersect, several gear shafts may be driven from pinions mounted on a single pinion shaft, as in tandem axles for trucks.In some cases, the desired reduction in angular velocity is too great to achieve using only two gears. When this occurs, several gears must be connected together to give what is known as a gear train. In many geartrains, it is necessary to be able to shift gears in and out of mesh so as to obtain different combinations of speeds. A good example of this is the automobile transmission.A change-speed gearbox usually comprises the driving shaft end, the layshaft, and the driven shaft, which are installed in the gearcase. A gear is rigidly mounted on the driving shaft end which protrudes into the gearcase. This gear is driven directly by the engine, through the clutch, and therefore rotates at the speed of the engine. It drives a second, somewhat larger gear which is mounted on the layshaft, so that this shaft rotates at a lower speed. The driven shaft is mounted in line with driving shaft and carries the longitudinally movable driven gears corresponding to the various speeds.。
《机械工程专业英语》PPT课件
•
•
Mechanical Engineering English
Dialogue Two
译文
• Mr. King: How about the activities in your school? • Lily: It blooms in every corner of campus.
Associations of different varieties organized by students with the same interest develop various popular activities such as Foreign Languages Festival and Computer Science Festival.
Mechanical Engineering English
• • • • • •
interrelate [ .intə(:)ri'leit ] v. 互相关连,相关 ecology [ i(:)'kɔlədʒi ] n. 生态学 reinstate [ 'ri:in'steit ] v. 恢复; vt. 使恢复原有的职位 assurance [ ə'ʃuərəns ] n. 保证,确信,保险 thrust [ θrʌst ] n. 推力,刺,力推; v. 插入,推挤,刺 incorporate [ in'kɔ:pəreit ] a. 合并的,公司组织的,具 体化的; v. 合并,组成公司,具体表现
Mechanical Engineering English
Lesson 3
机械工程 专业英语
Mechanical Engineering Design
探索机械振动在小学英语教育中的应用ppt课件教案

No significant improvement
Conclusion
A small number of students have not significantly improved their English grades, which may be related to personal learning habits, weak foundations, and other factors. It is necessary to provide guidance and reinforcement based on individual differences.
Summary: The causes of mechanical vibration can be divided into two categories: internal excitation and external excitation, and the propagation mode of vibration can be carried out in the form of waves.
Case 2
Another elementary school English teacher used mechanical vibrations to simulate animal sounds while teaching animal words, helping students better remember and understand the meanings of words, and also achieved significant teaching results.
Detailed description
机械振动

Fundamentals of VibrationLecture 1Ji Lin Section of Mechanical Design and Theory School of Mechanical Engineering Shandong UniversityVibration Problems1. Vibrations are usually small, oscillatory motionabout a static equilibrium position.2. Most engineering structures vibrate. (←Rotating machinery)Practical Examples Effects3. Becoming lighter, faster, quieter, and more flexibleare often more prone to vibrations.4. Engineers need to be equipped with the knowledgerequired to tackle vibration problems encountered in industry→to understand, model, analysis, design and treatGeneral AimTo introduce studentswith little or noprevious experience of mechanical vibrations, and with quite different backgrounds, to the basic concepts of vibrational behavior, to provide a general introduction to vibration modeling, analysis and control.Course Overview1. Course Content →9 Sections2. Resources1) Lecture notes (including examples and problems,mainly written by Prof. Mace, ISVR, Univ. of Soton)2) Mechanical Vibrations by S.S. Rao, Addison WesleyPublishing. (Core text)3)机械振动基础, 胡海岩, 航空工业出版社(Secondary text)3. Credit Value: 2 points4. Formal Contact Hours: 325. Assessment Assignments(80%) + Attendance(10%) + Others(10%)Introduction1. TerminologyFree/forced vibration; Damped/undamped system;Linear/non-linear system; Deterministic/random Vibration; Discrete/continuous system.2. Basic Principles (→to find system equations) Newton Laws; Work-energy; Impulse momentum; Lagrange’s equation3. Basic ConceptsDegree of freedom; Simple harmonic motion; Complexexponential notation (C.E.N); Frequency response function (FRF)Fundamentals • For vibration to occur we need ? mass? stiffness k? Theother vibration quantity is dampin gcSystem vibrate s aboutits equilibr ium positionIngredients of VibrationMass→store of kinetic energyStiffness→ store of potential (strain) energy Damping: → dissipates energyForce→ provide energyVibro-acoustic Problems Interior NoiseEffects of Vibration1. Large displacements and stresses (esp. resonance)2. Fatigue3. Noise, sound4. Breakage, wear, improper operation5. Physical discomfort, physiological effects6. Instabilities (flutter, galloping)no external forces ac t Free Vibration ←• System vibrates at its natural frequencyFundamentals -dampingMechanical Systems?Systems maybe linear or nonlinear ? Linear Systems ← (idealization)1Output frequency = Input frequency 2If the magnitude of the excitation is changed, theresponse will change by the same amount3 Superposition applies(Non-linear systems are not considered in this course.)Mechanical Systems • Linear system Mechanical Systems ? Linear systemy =M a+M b=M(a + b)Mechanical Systems• Nonlinear systemContain nonlinear springs and dampers; Do not follow the principle of superposition• output comprises frequencies other than the inputfrequency • output not proportional to inputNewton LawsForce = mass ×acceleration Moment = rotation inertia ×angular accelerationWork-energy= kinetic energy + potential strain ) energyEnergy ( Work of external forces = change in energyImpulse-momentum theoremImpulse = change in momentum Lagrange’s equationSystematic method (see the last sec tion )Degrees of Freedom (DOFs) -ModellingNumber of DOFs = number of independentcoordinates we use to describe themotionCoordinates may be displacements of some points, rotation, relative displacement, other (modal amplitudes).Number depends on 1) how complex the system is; 2) how we choose to model it; 3) modelling simplifications and assumptions; 4) what we want from the model. (←FEA? SEA?)Harmonic motio n2π radiansSolutioncan bewritten as any of=A sin( ωt ) +B cos( ωt ) t +)xt() =C sin( ωφ (←sinusoidal ortime harmonic)t +)xt() =D cos( ωθωfrequency :(rad /) f = (cycle / secω s ond ) 2π period :T (, )s time per cycle ( ): ==amplitude magnitude CD +B mean value : x =021 2Cmeansquare value : x=C →..rmsr m s value : x =2dxvelocity xdtA 2222dx acceleration xdt2Complex Exponential Notatio nbx = A cos φ+ iA sin φ x = A(c osφ+ i sin φ) + real+ imaginaryiphasEuler’s Equation±iφe = cos φ± i sin φ magnitude)22 −magnitudex= A=Complex Exponential Notation (C.E.N)Time harmonic quantity written as xt() =In the “real” world we see Re{X(t)}itωxiX=ωeTime derivativesx 2 eωiω X itdifferential equation→algebraic equation Make life easy butintroduce complex numbers.it+(ω φ)xt()=Xemagnitude phaseDeterministic vibrationForce and response known + predictable(e.g. rotating machinery, impulse, ect.)Random vibration Force and response unknown/unp redictablee.g. uneven road, wind, turbulenceboundary layers (TBL)Discrete Systemsfinite number of rigidmasses+massless stiffness elements Multi-degree-of-freedom (lumped parameter systems)(N modes, N natural frequencies)x3x1x2x4Continuous systemsSystems having distributed mass and stiffness (Infinitenumber ofdegrees-of-freedom)e.g. beams, plates etc.Example -beamFrequency Response Functions (FRFs) Define the system in terms of response to sinusoidal inputs (e.g. harmonic force excitations). FRF: The ratio output/input of a system in steady-state when time harmonic.ite.g. force (input)f =Fe ωitdisplacement (output)x =Xe ωit ratio of (complex)FRF →amplitude, does not Array Fe Fdepend on timeComplex, (usually) frequency dependent;=itωmagnitude phase ∠H ()ωH (ω)Harmonic Forces Weoften deal with time harmonic behaviour.Main Reasons1. often have harmonic forces, e.g. rotating machine;2. often have periodic forces comprising harmonic components, e.g. Fourier series;3. general forces transformed as a sum of harmonics by Fourier Transform.Harmonic ResponseFrequency Response Function (FRF) The ratio output/inputof a system insteady-state when time harmonic. Note that V =iX; A =ωω iVFrequencyResponseFunctions (FRFs)Acceleration ForceAccelerance = Apparent Mass =Force AccelerationDisplacement ForceReceptance = Dynamic Stiffness =Force DisplacementIn vibrations, FRFs depend on what we are interestedin.。
高中物理 主题2 机械振动与机械波 2 简谐运动的描述课件 高二第一册物理课件
12/9/2021
第十页,共三十九页。
栏目导航
2.对全振动的理解 (1)全振动的定义:振动物体以相同的速度相继通过同一位置所 经历的过程,叫作一次全振动.
(2)正确理解全振动的概念,还应注意把握全振动的四个特征. ①物理量特征:位移(x)、加速度(a)、速度(v)三者第一次同时与 初始状态相同.
12/9/2021
第十四页,共三十九页。
栏目导航
解析:物体做简谐运动,是变加速直线运动,在任意T4内通过的 路程不一定等于 A,故 A 错误;物体做简谐运动,在任意T2内通过的 路程一定等于 2A,故 B 正确;物体做简谐运动,在任意34T内通过的 路程不一定等于 3A,故 C 错误;物体做简谐运动,在一个周期内完 成一次全振动,位移为零,路程为 4A,故 D、E 正确.
(√ )
3.简谐运动的表达式 x=Asin(ωt+φ)中,ωt+φ 的单位是弧度.
(√ )
12/9/2021
第二十三页,共三十九页。
栏目导航
[后思考] 1.有两个简谐运动:x1=3asin4πbt+π4和 x2=9asin 8πbt+π2, 它们的振幅之比是多少?频率各是多少?
【提示】 它们的振幅分别为 3a 和 9a,比值为 1∶3;频率分 别为 2b 和 4b.
主题 2 (zhǔtí) 机械振动与机械波
2 简谐运动 的描述 (jiǎn xié yùn dònɡ)
12/9/2021
第一页,共三十九页。
学习目标 1.理解振幅、周期和频率的物理 意义,了解相位、初相、相位差 的概念.(重点) 2.理解周期和频率的关系. 3.掌握用公式描述简谐运动的方 法.(难点)
Lesson 2 force and their effects
If this workpiece is held between the centers of the lathe, the centers exert a compressive force against the work.[3]
3. centers of the lathe 意为“车床的两个顶尖”。全句可译为: 如果一个工件被安装在车床的两个顶尖之间,顶尖对工件施加 一个压力。
2012-4-23 《机械工程专业英语教程》 14
The lathe dog which drives the work tends to produce a shearing force. The pressure of the cutting tool against the work produces tension and compression, as well as a shearing action.
• The shaping of metal or wood on a lathe • 车削:用车床将金属或木材加工成型的过程
• Lathe 车床
2012-4-23
《机械工程专业英语教程》
5
Rectilinear Moving in, consisting of, bounded by, or characterized by a straight line or lines: 直线的:以直线运动的,由直线组成的,以直线为边的,具有直 线之特点的 micrometer 千分尺
第三种力因为它有使扭转物体的趋向,称为扭转力或是扭 矩 。还有另外一种使材料截面层发生滑移的力,称为剪切力。