Scan1
扫描代码

bool blnNamingOnly = false;string strFullPathFileName = "";bool bl = axImgScan1.ScannerAvailable();gstrWindowsTempDirectory = "D:\\";if (axImgScan1.ScannerAvailable() == true)//判断扫描仪是否可用{sPath = createFolder(); //创建文件夹//检查文件夹是否存在文件,如文件存在,检测最后一个文件名,提取文件数字DirectoryInfo dir = new DirectoryInfo(sPath);FileInfo[] finfo = dir.GetFiles();string fnames = "";for (int i = 0; i < finfo.Length; i++){fnames = finfo[i].Name.Substring(20, 3);//截取文件名中的最后3为字符if (int.Parse(fnames) > intNum)intNum = int.Parse(fnames);}intNum = intNum + 1;tooloptimizeBtn.Text = intNum.ToString();axImgScan1.PageOption =ScanLibCtl.PageOptionConstants.AppendPages;//axImgScan1.PageOption =ScanLibCtl.PageOptionConstants.PromptToCreateNewFile;axImgScan1.OpenScanner();//打开扫描仪axImgScan1.ScanTo = ScanLibCtl.ScanToConstants.DisplayAndFile;//以何种形式扫描,如仅文件、仅显示、或显示加文件axImgScan1.MultiPage = true;//扫描多页axImgScan1.FileType = ScanLibCtl.FileTypeConstants.TIFF;//被扫描后的文件存储格式类型axImgScan1.Page = axImgScan1.PageCount + 1;//新添加axImgScan1.Scroll = true;axImgScan1.SetPageTypeCompressionOpts(pPreferenceConstants.GoodDisplay, ScanLibCtl.ImageTypeConstants.ColorPal4Bit, pTypeConstants.TIFFPackbits, pInfoConstants.TIFFPackbitsInfo);//.G31DFaxRBO)axImgScan1.Image = @sPath + "\\"+ label171.Text + "-"+ intNum.ToString("000") + ".tif";//保存文件 + "*"axImgScan1.StartScan();//axImgScan1.DestImageControl = "axImgEdit1";//axImgThumbnail1.Image = axImgScan1.Image;//axImgThumbnail1.DisplayThumbs();//sum = axImgThumbnail1.ThumbCount;axImgScan1.StopScan();axImgScan1.CloseScanner();}else{MessageBox.Show("扫描仪没有正确连接,请重新设置!", "信息提示", MessageBoxButtons.OK, MessageBoxIcon.Exclamation);}strFullPathFileName = axImgScan1.Image;PerformFileOpen(blnNamingOnly, strFullPathFileName, 1);return;//在扫描结束后,弹出提示对话框sum = axImgThumbnail1.ThumbCount;frmMain.isSavePic = 1;frmMain.strFileDesc = label230.Text;frmFileDescribe frmFileDescribe = new frmFileDescribe();frmFileDescribe.ShowDialog();//saveAllPicture();//存储全部扫描的图片函数: PerformFileOpenpublic void PerformFileOpen(bool blnNamingOnly, string strFullPathFileName,int lngPageNo){axImgAdmin1.Image = strFullPathFileName;axImgEdit1.Image = strFullPathFileName;axImgThumbnail1.Image = strFullPathFileName;gintFileType = axImgAdmin1.FileType.ToString();axImgAdmin1.PageNumber = lngPageNo;axImgEdit1.Page = lngPageNo;axImgThumbnail1.set_ThumbSelected(lngPageNo,true);}。
PCDMIS比武海选考试题1
1、当标准球的位置移动之后,如何对新添加的测头角度进行校验A. 将所有的添加角度全部重新校验B. 只需要将新添加的测头角度校验即可C. 将之前第一个校验的测头角度(无论第一个角度是什么)连同新添加的角度进行校验D. 将A0B0连同新添加的角度在标准球移动后进行校验2、哪个特征不能作为坐标系的第一轴向A.平面B.球C.圆锥D.圆柱3、下列关于测量机测头的说法不正确的是A.测量工件前需要先校验测头B.测头加载测针的重量必须在要求的范围内C.测头加载测针的长度必须在要求的范围内D.测头校验目的只是校验红宝石球的直径4、评价两个面对称度时,下列元素可以作为基准的是A.直线B. 平面C.圆5、下面所述参数设置,哪项不是在F10中设置的A. 尺寸输出格式B. 安全平面C. 小数点位数D. 移动速度6、测量机湿度要求范围是A、10%~20%B、20%~70%C、70%~80%D、无湿度要求7、下面哪一种不属于三坐标测量机A、移动桥式B、固定桥式C、水平臂D、投影仪8、PC-DMIS中图形显示窗口操作描述不正确的是A、鼠标右键:平移B、按住鼠标中键:旋转C、滚动鼠标中键:缩放D、鼠标左键:平移9、如右图所示,如何在圆锥上得到高度为H的圆A、打开构造圆→选中圆锥→套用B、打开构造圆→选中圆锥→圆锥→直径C、打开构造圆→选中圆锥→圆锥→高度D、打开构造圆→选中圆锥→相交10、对于星形针说法错误的是A、星形针使用时必须使用加长杆B、星形针的四根针必须同时使用C、星形针的四根针的长度必须完全一致D、星形针的四根针可以单独使用11、测量机运行时,对话框常报错出现如下提示:①TR_OUTOL,Machine Parameter out of tolerance.A、机械行程超差、测座严重碰撞、在定义的理论位置未接触到工件、测头受到碰撞运动中断B、机械行程超差、在定义的理论位置未接触到工件、测座严重碰撞、测头受到碰撞运动中断C、机械行程超差、测座严重碰撞、测头受到碰撞运动中断、在定义的理论位置未接触到工件D、机械行程超差、在定义的理论位置未接触到工件、测头受到碰撞运动中断、测座严重碰撞12、下列说法哪些是错误的A.手动方式测量圆时,不需要考虑工作平面B.构造2D直线时要选择正确的工作平面C.评价2D距离和夹角时要选择正确的工作平面D.测量二维元素时要考虑正确的工作平面13、下列说法错误的是A.PC-DMIS可以通过设置debug文件来记录出错日志;B.PC-DMIS可以通过“视图-工具栏-窗口布局”来保存和调用窗口布局;C.PC-DMIS可以通过F10快捷键中的“尺寸”选项中设置报告中的尺寸顺序;D.PC-DMIS可以通过F10快捷键中的“尺寸选项”改变小数点的显示位数;14、图形窗口中的特征标示,可以关闭和隐藏,选择正确的操作菜单A.编辑—参数设置—窗口布局B.编辑—图形显示窗口—视图设置C.编辑—图形显示窗口—特征外观D.编辑—参数设置—编辑窗口颜色15、新版本的PC-dmis测头文件怎样设置才可以在旧版本中打开使用?A、测头工具栏——编辑B、测头工具栏——重置测尖C、测头工具栏——文件格式D、测头工具栏——重置测尖16、不可以通过构造得到的特征类型为A.特征组B.多边形C.曲线D.曲面17、需要评价M5,螺距1.25的螺纹孔的位置度,请选择下列最合适的测针:A.柱形测针B.Ø1球形测针C.Ø3球形测针18、下面对盘形针说法错误的是A、需要先校验一根普通测针,标定一下标准球的位置,之后再校验盘形测针;B、盘形测针通常配加长杆一起使用;盘形测针后缀为“DISK”。
AppScan使用入门-1
本人英语能力有限,如有错误请见谅。
——译者这个向导是AppScan用户向导手册和AppScan在线帮助的补充(fairyox)。
主要目的是为这个产品做介绍,如果需要更多的资料和详细的说明书请参阅用户手册和在线帮助1安装1.1AppScan安装将AppScan安装保存在计算机中,双击它,然后根据提示操作。
1.2注册文件安装AppScan安装中包括一个允许扫描指定站点的注册文件(见章节1.4),但是不能扫描其他站点。
扫描其他站点需要得到IBM授予的合法注册文件。
这样就可以扫描其他站点并读取和保存扫描模版,否则不能运行其他站点的扫描。
安装扫描文件:1.打开AppScan2.在帮助菜单选择License3.如果已经有注册文件:点Load License File,找到注册文件,点Open。
或者在网上获得注册文件:确认连接好Internet网,点Obtain License Online,然后根据提示操作4.点ok关闭注册对话框。
1.3升级IBM每天升级AppScan的应用弱点数据库。
每次AppScan会自从从IBM搜索、安装升级补丁。
用户也可以随时手动升级:打开AppScan,点击升级,根据提示操作。
1.4AppScan的试用版如果您在使用AppScan的试用版,注册文件只允许您对IBM Rational AppScan定制的测试站点进行测试:AppScan下载:https:///securearea/appscan.aspx测试站点:/用户名:jsmith 密码:demo12342概述2.1主界面AppScan 主界面包括一个菜单栏、工具栏和视图选择,还有三个数据窗口:应用树、结果列表和细节。
下图是主界面在进行数据扫描(扫描前三个数据窗口和统计图是空白的)。
2.2站点扫描的基本原理AppScan 扫描由两个阶段组成:探测和测试。
探测阶段:AppScan 用模拟人为点击链界和填写表格的方式探测站点(应用或者Web 服务)。
PhotoScan教程v1
PhotoScan-初级教程概述Agisoft PhotoScan 专业版允许从一组具有相应参考信息的重叠图像中生成地理参考密集点云,纹理多边形模型,数字高程模型和正射影像。
本教程描述了DEM / 正射影像生成工作流程的主要处理步骤,用于一组没有地面控制点的图像。
PhotoScan首选项在使用PhotoScan启动项目之前,建议根据需要调整程序设置。
在通过“工具”菜单提供的“首选项”对话框(“常规”选项卡)中,可以设置PhotoScan日志文件的路径,以便在处理过程中遇到任何问题时寻求Agisoft技术支持团队的帮助。
在这里,您还可以将GUI语言更改为最适合您的语言。
选项有:英文,中文,法文,德文,日文,葡萄牙文,俄文,西班牙文。
切换主题,以防您在黑暗或亮程序GUI中有偏好,或将其保留为最简单视图的经典。
快捷方式也可以根据一般选项卡进行调整。
在GPU选项卡上,您需要确保检查程序检测到的所有GPU设备。
PhotoScan利用GPU 处理能力,显着加快了这一过程。
但是,Agisoft不建议使用集成的图形卡适配器,因为它们可能在重负载下工作不稳定。
如果您决定打开GPU来增强使用PhotoScan的数据处理,建议取消选中“执行GPU加速处理时使用CPU”选项,前提是可用的GPU 数量不止一个。
“高级”选项卡允许您打开诸如丰富的Python控制台之类的高级功能。
此外,您可以启用从XMP(摄像机校准,摄像机方位角,摄像机位置精度,GPS / INS偏移)加载额外的摄像机数据。
要测试新的网格生成方法(构建网格,构建平铺模型处理步骤),您还需要检查“高级”选项卡上的相应选项。
建议使用“保留深度贴图”选项来支持此选项(选中“高级”选项卡上的框)。
保留深度图选项在节省处理时间方面也是有利的,以防在可能需要重建密集点云(一旦产生)的情况下用于较小部分的场景。
从版本1.4开始,PhotoScan允许增量式图像对齐,这在初始对齐的项目中缺少一些数据的情况下可能是有用的。
英语阅读SCAN和SKIP的训练方法
英语阅读SCAN和SKIP的训练方法(需自宫版)这两种方法不是我先提出来的,其实是现代社会发展的必备的一项能力,只是咱们的填鸭式或素质教育均不强调这点。
我这个人是被填鸭式教育毒害下来的,不过还好我还知道自己反思。
因为本性上比较叛逆,说白了,就是你让我干这个,我偏不爱干这个。
而你们这帮人是被所谓的素质角度毒害的,这种欺骗性更大,因为换汤不换药,本质上不是为了提高教学质量,而最终是归结到钱。
所以该具备的能力,其实我们都是欠缺的。
所以必须去反省。
而现在这个社会是资讯发达的社会,信息量巨大。
不跳读不扫读,无形中我们就落后于他人。
毕竟我们的知识更多是靠后天学习来获得的。
那SCAN就是扫读,SKIP就是跳读了。
本质上这两种阅读方法,每个人每天都在用。
比如你每天都要看报纸,不可能每个版面每个字都要看到。
那我们首先看一下重点在哪里,比较感兴趣的新闻在哪个版面,我们就会直接翻到那个版面,这就是SKIP. 那我们读这个感兴趣的文章的时候,我们不是每个字都读的,我们是那眼睛快速的扫里面有用的信息的,这就是SCAN。
但为什么我们阅读英语的时候不会SCAN和SKIP呢?一是因为老师没讲过,特别是那些非英语专业的。
二是因为我们不会,或者说不敢。
特别是当考研做到英语的时候,那么重要的卷子,谁敢呢?那么我告诉你,即使老师没讲过,我自己就去自学过。
而且我敢在考研的时候,英语每篇阅读里,至少有3-4句完整的句子我是一点没看过的。
那么首先要解决的是为什么考研英语就特别需要这两个能力呢?解决了这个问题,我们才能谈到训练方法。
因为考研的英语阅读量太大了。
就象特别纪念版的法律晚报,里面还没有任何的不用看的广告。
要在3个小时内做完,还要检查一遍,几乎是不可能的。
因为个人感觉,几乎80%左右的人是没有检查时间的。
很可能这个比例还要高。
所以特别需要能提高阅读速度的方法。
那么快速阅读最管用,也最常用的两种方法就是SCAN和SKIP了。
那么我们如何训练这两个能力呢?方法有二。
Progressive Scan 1 2.8英寸CMOS 2MP摄像头说明书
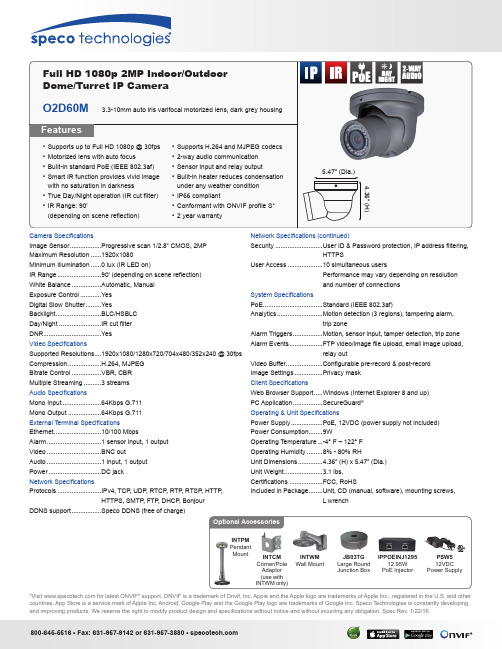
Camera SpecificationsImage Sensor ..................Progressive scan 1/2.8” CMOS, 2MPMaximum Resolution (1920x1080)Minimum Illumination ......0 lux (IR LED on)IR Range .........................90’ (depending on scene reflection)White Balance .................Automatic, ManualExposure Control ............YesDigital Slow Shutter .........YesBacklight ..........................BLC/HSBLCDay/Night ........................IR cut filterDNR .................................YesVideo SpecificationsSupported Resolutions ....1920x1080/1280x720/704x480/352x240 @ 30fpsCompression ...................H.264, MJPEGBitrate Control .................VBR, CBRMultiple Streaming ..........3 streamsAudio SpecificationsMono Input ......................64Kbps G.711Mono Output ...................64Kbps G.711External T erminal SpecificationsEthernet ...........................10/100 MbpsAlarm ...............................1 sensor input, 1 outputVideo ...............................BNC outAudio ...............................1 input, 1 outputPower ..............................DC jackNetwork SpecificationsProtocols .........................IPv4, TCP , UDP , RTCP , RTP , RTSP , HTTP ,HTTPS, SMTP , FTP , DHCP , BonjourDDNS support .................Speco DDNS (free of charge)Network Specifications (continued)Security er ID & Password protection, IP address filtering, HTTPS User Access ....................10 simultaneous users Performance may vary depending on resolution and number of connections System Specifications PoE ..................................Standard (IEEE 802.3af)Analytics ..........................Motion detection (3 regions), tampering alarm, trip zone Alarm Triggers .................Motion, sensor input, tamper detection, trip zone Alarm Events ...................FTP video/image file upload, email image upload, relay out Video Buffer .....................Configurable pre-record & post-record Image Settings ................Privacy mask Client Specifications Web Browser Support .....Windows (Internet Explorer 8 and up)PC Application .................SecureGuard ®Operating & Unit Specifications Power Supply ..................PoE, 12VDC (power supply not included)Power Consumption ........9W Operating T emperature ...-4° F – 122° F Operating Humidity .........8% - 80% RH Unit Dimensions ..............4.36” (H) x 5.47” (Dia.) Unit Weight ......................3.1 lbs.Certifications ...................FCC, RoHS Included in Package ........Unit, CD (manual, software), mounting screws, L wrench*Visit for latest ONVIF ® support. ONVIF is a trademark of Onvif, Inc. Apple and the Apple logo are trademarks of Apple Inc., registered in the U.S. and other countries. App Store is a service mark of Apple Inc. Android, Google Play and the Google Play logo are trademarks of Google Inc. Speco Technologies is constantly developing and improving products. We reserve the right to modify product design and specifications without notice and without incurring any obligation. Spec Rev. 1/22/16IPPOEINJ129512.95W PoE Injector PSW512VDC Power SupplyINTWM Wall Mount Pendant JB03TG Large Round Junction Box INTCM Corner/Pole Adaptor (use with INTWM only)800-645-5516 • Fax: 631-957-9142 or 631-957-3880 • 。
一步步教你如何配置添加删除11gr2 gns,scan,vip

The Grid Interprocess Communication (GIPC) daemon: This daemon is new in
Oracle 11gR2. The daemon process is gipcd, and it supports Grid Infrastructure
• The Grid Naming Service (GNS): This service performs name resolution within the
cluster. It is implemented by the gnsd daemon, and it provides a gateway between the cluster mDNS service and the external DNS servers.
安装结束
[oracle@oel1 ~]$ crsctl stat res -t -------------------------------------------------------------------------------NAME TARGET STATE SERVER -------------------------------------------------------------------------------Local Resources -------------------------------------------------------------------------------ora.DATA.dg ONLINE ONLINE oel1 ONLINE ONLINE oel2 ora.LISTENER.lsnr ONLINE ONLINE oel1 ONLINE ONLINE oel2 ora.asm ONLINE ONLINE oel1 ONLINE ONLINE oel2 ora.eons ONLINE ONLINE oel1 ONLINE ONLINE oel2 ora.gsd OFFLINE OFFLINE oel1 OFFLINE OFFLINE oel2 work ONLINE ONLINE oel1 ONLINE ONLINE oel2 ora.ons ONLINE ONLINE oel1 ONLINE ONLINE oel2 -------------------------------------------------------------------------------Cluster Resources -------------------------------------------------------------------------------ora.LISTENER_SCAN1.lsnr 1 ONLINE ONLINE oel2 ora.LISTENER_SCAN2.lsnr 1 ONLINE ONLINE oel1 ora.LISTENER_SCAN3.lsnr 1 ONLINE ONLINE oel1 ora.gns 1 ONLINE ONLINE oel1 ora.gns.vip 1 ONLINE ONLINE oel1
霍尼韦尔 P1 ScanPal EDA51-1 企业平板说明书

with Android™ 8.1 Operating System免责声明霍尼韦尔公司(简称HII)有权对本手册的规格和其他信息作出更改,并不另行通知。
任何情况下,用户应向HII 确认是否进行了任何更改。
本刊物内容并不代表HII 方的承诺。
DisclaimerHoneywell International Inc. (abbr. HII) reserves the rights to modify the specifications and other information mentioned in this User Guide without prior notification. In any case, users should confirm with HII whether any changes were made. This publication does not represent any commitments of HII.HII 不会对此手册的技术或编辑错误或遗漏承担责任;也不会对因提供、执行或使用此材料所造成的意外或间接损害承担责任。
HII 对为达到产品预期效果而选择或使用的软件或硬件不承担责任。
HII is not responsible for any technical or editing errors or omissions contained in this manual, nor for any incidents or indirect damages caused by providing, implementing or using this material. HII is not responsible for the softwares or hardwares selected or used in order to achieve the desired results.此文档包含受版权保护的专有信息。
LeicaTCSSP5激光共聚焦显微镜系统软件操作手册
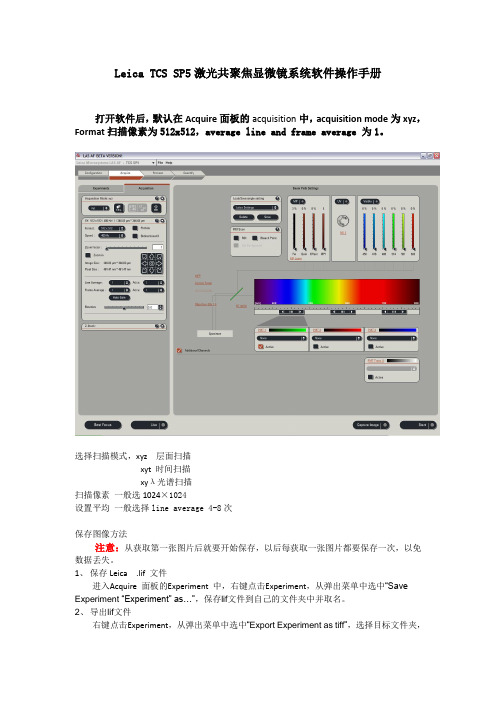
Leica TCS SP5激光共聚焦显微镜系统软件操作手册打开软件后,默认在Acquire面板的acquisition中,acquisition mode为xyz,Format扫描像素为512x512,average line and frame average 为1。
选择扫描模式,xyz 层面扫描xyt 时间扫描xyλ光谱扫描扫描像素一般选1024×1024设置平均一般选择line average 4-8次保存图像方法注意:从获取第一张图片后就要开始保存,以后每获取一张图片都要保存一次,以免数据丢失。
1、保存Leica .lif 文件进入Acquire 面板的Experiment 中,右键点击Experiment,从弹出菜单中选中“Save Experiment “Experiment” as…”,保存lif文件到自己的文件夹中并取名。
2、导出lif文件右键点击Experiment,从弹出菜单中选中“Export Experiment as tiff”,选择目标文件夹,选中rawdata导出单通道图片。
如需导出overlay 图片,则再次右键点击Experiment,从弹出菜单中选中“Export Experiment as tiff”,选择目标文件夹,选中overlay 导出多通道合成图片。
一、获取单一荧光图像1、在beam path setting 中的load/save single setting 中选择所标记荧光的光路设置方法。
2、点击live开始连续扫描,优化图像质量。
调节z position选择需扫描层面,调节gain和offset 使图像亮度和背景到达到合适的状态,Zoom调节电子放大倍率。
点击stop,停止扫描。
3、点击capture image获取图像。
4、保存图像。
二、获取多荧光图像1、点击seq ,出现sequential scan面板。
2、在sequential scan面板中点击scan 1,在beam path setting 中选择所标记的一种荧光的光路设置方法。
OLED显示原理质量培训1
Id=k(Vsg-|Vth|)2=k(PVDD-(Vdata|Vth|)-|Vth|)2=k(PVDD-Vdata)2
面板显示均匀性很差 补偿Vth
10
7T1C (天马5.46 HD CMOS)
Poly
M1
PVDD Vdata MC
M2
POLY ET AEI
Vref SCAN1
SCAN2
EMIT
下一级 SCAN1
Vref=-3V
常用信号设置 PVDD: 4.6V PVEE: -3V VGH: 7V VGL: -8V
T1:节点初始化+阳极复位 N1=Vref,N4=Vref
12
7T1C (天马5.46 HD CMOS)
PVDD Vdata
常用信号设置
PVDD: 4.6V
PVEE: -3V
T2
VGH: 7V
VGL: -8V
由于电容具有电平保持作用,电容的充放电速度很快,因此,Scan只需 要在很短的脉冲时间打开T1管,迅速地把Data线上的电平信号传递给电容。 尔后,即使T1管截止,电容两端电压依然保持不变,并钳制T2管打开的程度, 直至下一个扫描信号的来临。
发光电流:Id=k(Vsg-|Vth|)2=k(PVDD-Vdata-|Vth|)2
不良特征 2T1C可见,不良点位匹配PVD ANN机台
失效模式&原因
失效模式为驱动管Vth Shift,倾向与 三层有机膜ANN相关,相关影响因子 DOE验证中
弱氢化黑团
2T1C反转,与弱氢化条件相关
Stress相关mura 降低VGH,异常变轻微,stress恶化可复现
失效模式为驱动管Vth Shift,排查弱 氢化条件导致局部Vth均一性变差, DOE验证增加Buffer可改善氢化均一 性,其余因子待进一步实验验证。
scan产品在农村和小城镇污水监测中的应用1
导率、吸光度、ORP、温度; -- 水质安全预报警:污染物、碳氢污染物。
度、电
第四页,共42页。
奥地利s::can光谱分析仪器 的技术原理
内部结构
第五页,共42页。
奥地利s::can光谱分析仪器 的技术原理
测量原理
第六页,共42页。
ana::tool – 事件监测方法 ana::larm –在线光谱基础上的报警系统
第七页,共42页。
© s::can Messtechnik GmbH
奥地利s::can光谱分析仪器 的技术特点
1. 即插即测,无需药剂,无二次污染 2. 一机多种参数测量 3. 安装方便,操作简单,最少的维护 4. 稳定运行,正常率高 5. 在线光谱分析:基于指纹图的强大的软件系统,设备运行及纪录
外形
2“ 日光 LCD灯, 字母数字显示, 键盘区, 包括电源 24 V= 或 230 V~, 清洗阀, IP 65
第十九页,共42页。
ammo::lyser –NH4+pH 分析仪
• 通过RS485协议全部整合,没有其他终端 • 钾离子补偿 (4 个电极) • 结合pH 值 (推荐) • 长期稳定,性能卓越的离子选择性传感器 • „离子载体“ (离子选择液膜片) • 自动清洗,结合了压缩空气系统 • 推荐没有检查校准(1分钟)
• 4-6个月简单的膜片更换
• 经过许多国家客户的测试和认可 • 可以选择其他的电极,如氟离子
第二十页,共42页。
溶解氧分析仪 oxi::lyser
测量原理
荧光法
测量范围
0.0 to 25.0 ppm
灵敏度
0.02 ppm
gmp指南第二版与第一版的区别

gmp指南第二版与第一版的区别## Differences between GMP User's Guide, Version 2 and Version 1。
New features in Version 2。
New functions:`mpn_divm_ui` and `mpn_divm_ui_umax`: divide a mpn by a uint and store the remainder in another mpn.`mpn_pdivm_ui` and `mpn_pdivm_ui_umax`: divide a mpn by a uint and store the quotient in another mpn.`mpn_modm_ui` and `mpn_modm_ui_umax`: compute the remainder of dividing a mpn by a uint.`mpn_divm_by3` and `mpn_pdivm_by3`: divide a mpn by 3 and store the remainder or quotient in another mpn.`mpn_modm_by3`: compute the remainder of dividing a mpn by 3。
`mpn_preinv_m_ui`: precompute the modular inverse of a mpn modulo a uint.`mpn_mullo_n` and `mpn_mullo_n_ui`: multiply two mpns and store the result in another mpn.`mpn_muluo_n` and `mpn_muluo_n_ui`: multiply two mpns and store the result modulo a uint.`mpn_div_q'` and `mpn_div_q_ui`: divide two mpns and store the quotient in another mpn.`mpn_lshift_n` and `mpn_lshift_n_ui`: left shift a mpn by a uint.`mpn_rshift_n` and `mpn_rshift_n_ui`: right shift a mpn by a uint.`mpn_lshift_n_1` and `mpn_lshift_n_1_ui`: leftshift a mpn by 1 bit.`mpn_rshift_n_1` and `mpn_rshift_n_1_ui`: right shift a mpn by 1 bit.`mpn_cmp_n` and `mpn_cmp_n_ui`: compare two mpns.`mpn_cmp_zero` and `mpn_cmp_zero_ui`: compare a mpn to zero.`mpn_copyi_n` and `mpn_copyi_n_ui`: copy a uint to a mpn.`mpn_set_n` and `mpn_set_n_ui`: set all bits of a mpn to a uint.`mpn_is_zero` and `mpn_is_zero_ui`: check if a mpn is zero.`mpn_is_odd` and `mpn_is_odd_ui`: check if a mpnis odd.`mpn_is_even` and `mpn_is_even_ui`: check if a mpn is even.`mpn_is_uint` and `mpn_is_uint_ui`: check if a mpn is representable as a uint.`mpn_is_negative` and `mpn_is_negative_ui`: check if a mpn is negative.`mpn_get_ui` and `mpn_get_ui_umax`: get the uint representation of a mpn.`mpn_neg` and `mpn_neg_ui`: negate a mpn.`mpn_abs` and `mpn_abs_ui`: compute the absolute value of a mpn.`mpn_to_binary_n` and `mpn_to_binary_n_ui`: convert a mpn to a binary string.`mpn_to_hex_n` and `mpn_to_hex_n_ui`: convert a mpn to a hexadecimal string.`mpn_from_binary_n` and `mpn_from_binary_n_ui`: convert a binary string to a mpn.`mpn_from_hex_n` and `mpn_from_hex_n_ui`: convert a hexadecimal string to a mpn.`mpz_cdiv_q_ui`: divide two mpzs and store the quotient in another mpz.`mpz_fdiv_q_ui`: divide two mpzs and store the quotient and fractional part in another mpz.`mpz_tdiv_q_ui`: divide two mpzs and store the quotient and remainder in another mpz.`mpz_cmp_d`: compare a mpz to a double-precision floating-point number.`mpz_to_double`: convert a mpz to a double-precision floating-point number.`mpz_from_double`: convert a double-precision floating-point number to a mpz.`mpz_fdiv_r_ui`: compute the remainder of dividing a mpz by a uint.`mpz_fdiv_q_ui`: compute the quotient of dividing a mpz by a uint.`mpz_neg_ui`: negate a mpz.`mpz_mul_2exp`: multiply a mpz by a power of 2。
surface scan设备工作原理

surface scan设备工作原理Surface Scan设备工作原理介绍Surface Scan设备是一种常用的检测设备,用于检测表面缺陷、异物或者不平整性。
它主要通过使用特定的传感器和算法来实现。
工作原理概述Surface Scan设备主要包括以下几个步骤:1.传感器接触表面:首先,传感器部分会与待检测的表面接触,通常通过机械装置实现。
传感器可以是光学传感器、超声波传感器或电磁传感器等。
2.扫描表面:一旦传感器接触到表面,它会开始扫描整个表面区域。
传感器通常具有固定的扫描速度和分辨率,以确保准确的检测结果。
3.数据采集:传感器在扫描表面过程中会收集大量的数据。
这些数据可以是图像、声音、电子信号等形式,具体取决于传感器的类型。
4.数据分析:采集到的数据会经过一系列算法进行分析和处理。
这些算法通常针对具体的表面缺陷或异物进行优化,并能够识别各种形状、尺寸和位置的问题。
5.结果输出:最后,Surface Scan设备会根据数据分析的结果生成一份检测报告。
报告通常包括表面缺陷或异物的位置、尺寸以及其严重程度。
传感器类型Surface Scan设备可以使用不同类型的传感器,下面列举了几种常见的传感器类型:•光学传感器:光学传感器主要通过光的反射和散射来检测表面缺陷。
它可以使用不同类型的光源和相机来采集图像,并通过图像处理算法来分析和识别表面问题。
•超声波传感器:超声波传感器通过发射超声波信号并接收其反射信号来检测表面问题。
它可以检测到更深层次的问题,并且对于非金属材料也非常适用。
•电磁传感器:电磁传感器使用电磁场来检测表面问题。
它适用于金属表面的检测,并且可以提供更精确的测量结果。
数据分析算法Surface Scan设备的数据分析算法主要包括以下几类:•图像处理算法:对于光学传感器采集到的图像数据,图像处理算法可以进行边缘检测、灰度变换、滤波等操作,以识别表面问题。
•声音分析算法:对于超声波传感器采集到的声音信号,声音分析算法可以识别不同类型的声波谱,并通过比较来判断表面问题。
cscan算法磁头移动总数计算

一、概述在磁盘调度算法中,cscan算法是一种常用的算法之一。
它主要用于减少磁头的寻道时间,从而提高磁盘I/O性能。
本文将会介绍cscan 算法的基本原理,并详细解释如何计算磁头的总移动距离。
二、cscan算法介绍1.1 cscan算法是一种循环扫描算法,它沿着磁道的方向进行扫描,当磁头到达磁盘的最后一个磁道时,会立即返回到最开始的磁道进行扫描。
1.2 cscan算法的特点是磁头始终向同一个方向进行移动,这样可以尽量减少磁头的寻道时间,提高磁盘I/O性能。
三、cscan算法磁头移动总数计算2.1 我们需要了解磁盘的结构。
磁盘由多个磁道组成,每个磁道又由多个扇区组成。
磁头在进行读写操作时,需要先定位到指定的磁道,然后找到相应的扇区进行读写。
2.2 在cscan算法中,磁头的移动方向始终是同一个。
当需要进行磁盘I/O操作时,磁头会按照顺时针或逆时针的方向进行移动,直到找到目标磁道进行读写操作。
2.3 磁头的总移动距离可以通过以下公式进行计算:总移动距离 = (最后一次访问的磁道号 - 第一次访问的磁道号) + (磁盘的磁道数 - 1)四、实例分析3.1 假设一个磁盘有100个磁道,磁头需要按照cscan算法进行磁盘I/O操作。
首次访问的磁道号为50,最后一次访问的磁道号为80。
3.2 根据上述公式,可以计算出磁头的总移动距离为:总移动距离 = (80 - 50) + (100 - 1) = 30 + 99 = 129磁头的总移动距离为129。
五、总结cscan算法是一种常用的磁盘调度算法,它通过减少磁头的寻道时间来提高磁盘I/O性能。
在实际应用中,我们可以通过计算磁头的总移动距离来评估cscan算法的性能表现。
希望本文对读者了解cscan算法的磁头移动总数计算有所帮助。
六、参考文献[1] Silberschatz A, Galvin PB, Gagne G. Operating System Concepts. Wiley, 2018.[2] Tanenbaum AS, Bos H. Modern Operating Systems. Pearson Education, 2014.七、 cscan算法在实际应用中的优缺点4.1 cscan算法作为一种常见的磁盘调度算法,其优点主要在于能够有效减少磁头的寻道时间,从而提高了磁盘I/O性能。
PC-DMIS_SCAN扫描

触测/矢量,2742.67,-639.983,630.17,-0.5040664,0.7160254,-0.4829335,2742.67,-639.983,630.17,T=0
触测/矢量,2741.656,-641.778,628.686,-0.5327146,0.6817567,-0.5014209,2741.656,-641.778,628.686,T=0
PC-DMIS SCAN 参数设置
F5
F10
此处勾选数字可调 F10
PC-DMIS SCAN 参数设置
1.注意测针配置,SP25 为M3螺纹
2.选择DCC+DCC 3.标准球直径选择25mm
PC-DMIS SCAN参数设置
扫描类型 方向 1 方法
增量设置
方向 2 方法
高级功能设置区
3D矢量补偿
条件用于在终点处停止
扫描。利用边界条件对
话框,可以从边界类型
下拉列表中选择以下边
界类型:
•平面
•球
•柱体 •锥体
测头运行轨迹 方向点
起始点
•旧格式
pc-dmis会在终止点添加一个所选类型的边界,我们以边界类型面为例,边
界交叉数为1(闭线为2 ),即当测头通过边界面1次就会停止扫描。
PC-DMIS SCAN 开线扫描
最简单的理解是,法线失量为测头退出的方向,角失量为所测特征 的第一个点的方向
PC-DMIS SCAN 开线扫描
剖面矢量: 剖面表示测头运行轨迹所形成的面,具体定义为起始 点的矢量方向(看成第一条线)、起始点和终止点连线看成第二 条线,两条线所形成的面。
PC-DMIS SCAN 开线扫描
NOMINALS设置: 1.主:在扫描结果中将实测值作为理论值 2.查找标称值:扫描完毕后将刺穿CAD模型,以查找CAD模型上与测定点 最接近的位置,然后将标称值设置为CAD特征上的这一位置。 EXECUTE设置: 1.常规模式:当再次执行程序时根据程序中的理论值采集实测数据。 不对理论值重新计算。 2.重新学习:当再次执行程序时类似于初次创建程序,更新实测值 并根据标称值中的选项对理论值重新计算。
r语言scan函数用法

r语言scan函数用法大家好,我是一名大学教授,今天要和大家分享一下R语言scan函数的用法。
scan 函数在R语言中非常重要,它可以让我们从文件或者控制台中读取输入,并将其转换为R 语言中的向量或矩阵等数据结构。
接下来,我将为大家详细介绍scan函数的语法和用法。
scan(file=NULL, what=double(), nmax=-1, n=-1, sep="", quote=NULL, dec=".", skip=0,nlines=0, quiet=FALSE, blank.lines.skip=TRUE, multi.line=TRUE,flush=FALSE,encoding=getOption(“encoding”))其中,每个参数的含义如下:- file:指定要读取的文件名,如果不指定则从stdin读取。
- what:指定要读取的数据类型,包括character、numeric、integer、complex和logical等类型。
- nmax:指定从输入流中最多读取多少数据条目(转化为行数)。
-1表示没有限制。
- n:指定从输入流读取的数据条目的数量。
-1表示没有限制。
- sep:指定从输入流中读取数据项之间的分隔符。
默认是任何空格或者tab字符。
- quote:指定用哪个字符括住数据项。
默认是双引号。
- dec:指定用于小数点的分隔符。
默认是点号。
- skip:指定从输入流的开头跳过多少条数据行。
默认是0。
- nlines:指定要读取的行数。
- quiet:标志是否打印信息。
默认是FALSE,表示打印。
- blank.lines.skip:标志是否跳过输入流中的空行。
默认是TRUE,表示跳过。
- multi.line:标志是否读取多行输入。
默认是TRUE。
- flush:标志是否立即清除输入流的缓冲区。
默认是FALSE。
- encoding:指定文本编码,默认是getOption(“encoding”)。
arp scan原理
arp scan原理ARP扫描原理ARP(Address Resolution Protocol)扫描是一种网络扫描技术,它用于获取局域网中主机的MAC地址和IP地址之间的映射关系。
ARP扫描是一种被动扫描方式,它不会向目标主机发送任何数据包,而是通过监听局域网上的ARP请求和响应包来获取目标主机的信息。
ARP协议是在网络层和数据链路层之间进行通信的协议,它的作用是将IP地址转换为MAC地址。
在局域网中,每个主机都有一个唯一的MAC地址和一个IP地址。
当主机需要与其他主机通信时,它需要知道目标主机的MAC地址。
这时,主机会发送一个ARP请求广播包,询问目标主机的MAC地址。
目标主机接收到ARP请求包后,会向发送方主机回复一个ARP响应包,包含自己的MAC地址。
ARP扫描利用了这个原理,在局域网中主动发送ARP请求包,并监听ARP响应包,从中获取目标主机的MAC地址和IP地址的映射关系。
通过扫描局域网中的所有主机,可以获得整个局域网的主机列表。
ARP扫描工具通常使用ARP协议的原始套接字来发送ARP请求包,并通过网络接口监听ARP响应包。
扫描工具首先会向局域网中的所有主机发送ARP请求包,然后等待一段时间,收集并分析收到的ARP响应包。
根据收到的响应包,扫描工具可以获取目标主机的IP地址和MAC地址,以及其他相关信息。
ARP扫描可以用于多种目的,例如网络管理和安全审计。
在网络管理中,管理员可以使用ARP扫描来获取局域网中的主机列表,以便进行设备管理和性能监控。
在安全审计中,ARP扫描可以用于检测局域网中的潜在安全风险,例如未经授权的设备或恶意主机。
尽管ARP扫描是一种常见的网络扫描技术,但它也有一些局限性。
首先,ARP扫描只适用于局域网,无法跨越路由器进行扫描。
其次,ARP扫描只能获取局域网中的主机列表,无法获取主机之间的网络拓扑关系。
此外,由于ARP响应包是广播发送的,因此ARP扫描会对局域网产生一定的网络负载。