课程设计电动葫芦设计
综合课程设计,机械手,电动葫芦

一、课程设计的目的(综合训练) 1.巩固、加深和扩大在先修课程学到 的知识 2.掌握机械设计一般方法与过程 3.进行机械设计基本技能的训练 4.培养学生综合运用能力
二、课程设计的背景
2.1 电动葫芦简介 电动葫芦属于起重机械的一种,简称电葫芦 简称电葫芦。 电动葫芦属于起重机械的一种 简称电葫芦。 是一种轻小型起重设备。葫芦具有体积小, 是一种轻小型起重设备。葫芦具有体积小,自重 操作简单,使用方便等特点,用于工矿企业, 轻,操作简单,使用方便等特点,用于工矿企业, 仓储码头等场所。电动葫芦是由电动机、 仓储码头等场所。电动葫芦是由电动机、传动机 构和卷筒或链轮组成, 构和卷筒或链轮组成,分为钢丝绳电动葫芦和环 链电动葫芦两种。 链电动葫芦两种。
2.2 工业机械手简介 1.与单机一起实现自动化 . 生产上出现的许多高效专用加工设备( 生产上出现的许多高效专用加工设备(如各种 专用机床等),如果工件的装卸等辅助作业, 专用机床等),如果工件的装卸等辅助作业, ),如果工件的装卸等辅助作业 继续由人工操作,不仅会增加工人劳动强度, 继续由人工操作,不仅会增加工人劳动强度, 同时亦不能充分发挥专用设备的效能, 同时亦不能充分发挥专用设备的效能,必然会 影响劳动生产率的提高。 影响劳动生产率的提高。若采用机械手代替人 工上、下料,则可改变上述不相适应的情况, 工上、下料,则可改变上述不相适应的情况, 实现单机自动化生产,并为实现多机床看管提 实现单机自动化生产, 供了条件。 自动机床及其上下料机械手、 供了条件。如:自动机床及其上下料机械手、 冲压机械手、注塑机及其取料机械手等。 冲压机械手、注塑机及其取料机械手等。
起重量/工作级别/起升高度/ 性能 起重量/工作级别/起升高度/起 参数:升速度/ 参数:升速度/运行速度
5t电葫芦课程设计

5t电葫芦课程设计一、课程目标知识目标:1. 学生能理解电葫芦的基本概念、结构原理及安全操作规程。
2. 学生能掌握电葫芦的主要部件及其功能,了解其工作原理。
3. 学生能了解电葫芦在日常生活中的应用,认识到其重要性。
技能目标:1. 学生能正确操作电葫芦,完成提升和搬运重物的任务。
2. 学生能进行简单的电葫芦故障排查和维护。
3. 学生能运用电葫芦进行实际工程项目的模拟操作。
情感态度价值观目标:1. 学生培养安全意识,养成在使用电葫芦时严格遵守操作规程的习惯。
2. 学生培养团队协作精神,学会在工程项目中相互配合、共同完成任务。
3. 学生增强对机械设备的兴趣,激发学习相关领域知识的热情。
课程性质:本课程为实践性课程,注重理论联系实际,提高学生的动手操作能力和实际应用能力。
学生特点:五年级学生具备一定的认知能力、动手能力和探究精神,但对电葫芦等专业设备的了解有限。
教学要求:结合学生特点,课程设计要注重启发式教学,引导学生主动参与,确保学生在实践中掌握知识,提高技能,培养正确的情感态度价值观。
通过分解课程目标为具体学习成果,为教学设计和评估提供依据。
二、教学内容1. 电葫芦概述- 了解电葫芦的定义、分类及适用范围。
- 熟悉电葫芦在我国的发展现状及未来趋势。
2. 电葫芦的结构与原理- 学习电葫芦的主要组成部分及其功能。
- 掌握电葫芦的工作原理和操作流程。
3. 电葫芦的安全操作规程- 掌握电葫芦操作前的准备工作及安全检查。
- 学习电葫芦操作过程中应注意的安全事项。
4. 电葫芦的操作与维护- 学习电葫芦的正确操作方法,包括启动、运行、停止等。
- 掌握电葫芦的日常维护保养知识,了解故障排查方法。
5. 电葫芦的应用实例- 分析电葫芦在工程项目、仓储物流等领域的实际应用案例。
- 学习电葫芦在不同场景下的操作技巧和注意事项。
教学内容安排和进度:第1课时:电葫芦概述及发展现状第2课时:电葫芦结构与原理第3课时:电葫芦安全操作规程第4课时:电葫芦操作与维护第5课时:电葫芦应用实例分析与实操练习本教学内容紧密结合课程目标,注重科学性和系统性,结合教材章节内容,旨在帮助学生全面了解电葫芦知识,提高实际操作能力。
课程设计电动葫芦设计

课程设计说明书课程名称:机械综合课程设计设计题目:钢丝绳电动葫芦起升用减速器设计课程设计时间:指导教师:班级:学号:姓名:目录1 题目分析 (3)2 设计计算 (3)1)电动机的确定 (3)2)总体设计计算 (4)3 齿轮的设计计算与校核 (6)1)第一对齿轮的设计与校核 (6)2)第二对齿轮的设计与校核 (11)3)第三对齿轮的设计与校核 (15)4 轴的设计与危险轴的校核 (19)5 课程设计总结 (22)6 参考文献 (22)1 题目分析电动葫芦是一种常用的搬运设备,在工厂中使用十分广泛。
电动葫芦由两部分组成,即行走机构和提升机构。
下面分别介绍各组成部分。
1.行走机构组成:行走电动机、传动机构两部分组成。
2.提升机械组成:提升电动机、卷扬机构、机械制动器(一般为盘式制动器)。
3.制动器介绍:电动葫芦(或起重机)的提升机构一定要有机械制动装置,当物体起吊到一定高度后全靠机械制动器将其制停在空中。
制动器的工作机理有液压驱动、气压驱动和牵引电磁铁驱动。
不同的驱动方式其制动的性能也不相同。
在小型电动葫芦上一般采用电磁驱动制动器。
电动葫芦(或起重机)上提升机构采用的制动器种类繁多,在小型电动葫芦上较多采用的制动器是盘式制动器,盘式制动器又称为碟式制动器。
盘式制动器重量轻、构造简单、调整方便、制动效果稳定。
为了安全起见,在起重设备上一般均采用常闭式制动器。
所谓常闭式是指在电磁机构不得电的情况下,制动器处于制动状态。
制动器安装在电动机的一端,一般情况是封闭的,用眼晴直接是看不到的,但这没有关系,一般会将牵引电磁铁的线圈引出线留在外面。
我们只要将线圈接正确就行。
当电动机得电的同时(接触器吸合时),制动器的牵引电磁铁也同时得电,制动器打开。
这种联接方式的优点是,当发生停电事故时可以立即进行制动以避免事故的发生。
其缺点是制动瞬间设备的机械抖动较大。
2 设计计算1)电动机的确定由公式得:P=FV/1000=GV/1000=10000×(4/60)/1000=0.67kwⅠ与电机Ⅱ与ⅠⅢ与Ⅱ输出轴与Ⅲ筒与输出轴总ηηηηηη==0.96×(0.99×0.99)×(0.99×0.99)×(0.99×0.99)×0.98 =0.8857 电动机功率:d p =w p /总η=0.67/0.8857=0.75266kw由于钢丝绳电葫芦起吊和停止时有一些冲击,根据冲击程度一般使用系数A k =1.4故p ≥1.4d p =1.0537kw电机转速取:n 电=1380r/min由于功能需要,采用锥形转子电机。
电动葫芦基础设计(教材)

机械产品综合设计课程设计指导书之二电动葫芦设计柯尊忠朱龙根主编合肥工业大学机械设计教研室1 电动葫芦总体设计1.1概述电动葫芦是一种小型的起重机械,它由电动机、减速机构、卷筒、吊具及运行小车等部分组成。
1.2电动葫芦主要参数起重量 起升高度 幅度起升速度 工作制度 工作级别 机构利用级别 载荷机构级别 名义载荷谱系数 机构工作级别 自重载荷1.3电动机容量的确定根据IEC-72的规定,电动机的基准性工作方式为S 3-40%,即电动机应为断续周期性工作方式,每一周期的起动电流对电动机的温升无明显影响,每10分钟为一工作周期,接电持续率JC 为40%。
1.3.1计算稳态平均功率,初选电动机型号起升机构的电动机稳态平均功率1000Q n S F v Pη式中 P s -起升机构电动机的稳态平均功率(kw);G -稳态平均负载系数,按表1-13取0.8; F q -起升载荷(N );η-机构总效率,取η=0.8 V q -起升速度(m/min )根据计算得到的S P ,初选一参数接近的电磁制动电动机。
1.3.2电动机发热校验首先要计算电动机所需得接电持续率ε100%ε式中 ε-电动机所需得接电持续率P S -计算得到的稳态平均功率(kw ) P n -基准工作方式下的稳态平均功率(kw ) t -一个工作循环的时间,为10mint w -一个工作循环中电动机实际工作时间(min )1.3.3电动机过载校验对于不同的工作机构,过载校核计算公式也不同,一般是在静功率计算的基础上加以修正。
起升机构的电动机过载校验公式为 1000Q n n mH F v P ≧λη式中 P n -基准工作方式下的稳态平均功率 F Q -起升载荷 V n -起升速度 η-机构总效率mλ-基准接电持续率时,电动机转矩允许的过载倍数,取mλ=2.0~2.2H - 考虑电压降,最大转矩存在误差因素的系数,对于鼠笼式异步电动机 H =2.2 绕线式异步电动机 H =2.1 直流电动机 H =1.41.4起升机构的计算1.4.1计算钢丝绳最大拉力,确定钢丝绳直径作用在钢丝绳上的最大静拉力为 m ax Q Z dF S K m =ηη式中:F q -起升载荷k -单联卷筒,取k =1 ; 双联卷筒,取k =2 ;m -滑轮组倍率(悬挂物品的钢丝绳分支数与绕入卷筒的钢丝绳分支数之比),取m =2ηz ηd -滑轮组及导向滑轮的效率,对于滚动轴承ηz ηd 取为0.97;对于滑动轴承ηz ηd 取为0.92;1.4.2卷筒的构造和尺寸钢丝绳受力后,内部应力难以准确计算,通常可按钢丝绳在工作状态下的最大静拉力来计算钢丝绳的最小直径d =式中: d - 钢丝绳最小直径(mm ) S max -钢丝绳上最大静拉力(N )C -选择系数C =式中: ω-钢丝绳充满系数,为绳断面面积和毛面积之比k -钢丝绳绕制折减系数 ζb -钢丝的公称抗拉强度 n -安全系数 由表1-8查得卷筒槽的尺寸:取标准槽尺寸: R 、t 1 、r 1 、c 11)卷筒的名义直径: D =(h -1)d式中: d -钢丝绳直径, mm ;h -与机构工作级别有关的系数,按表1-9选取。
电动葫芦课程设计设计计算说明书
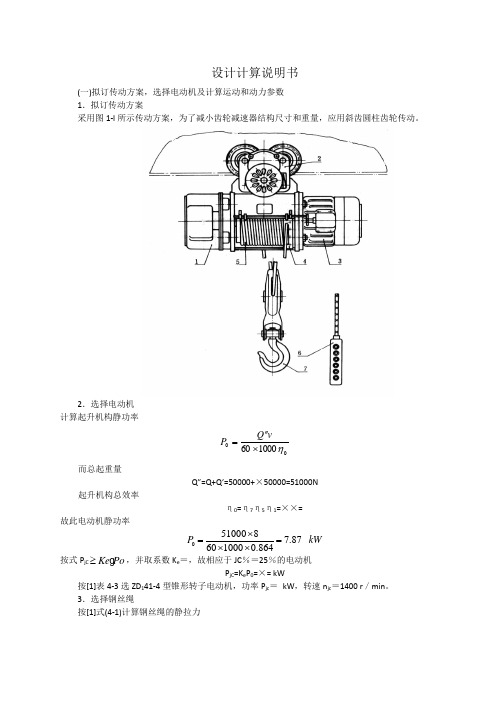
设计计算说明书(一)拟订传动方案,选择电动机及计算运动和动力参数 1.拟订传动方案采用图1-l 所示传动方案,为了减小齿轮减速器结构尺寸和重量,应用斜齿圆柱齿轮传动。
2.选择电动机 计算起升机构静功率0100060η⨯''=vQ P而总起重量Q ”=Q+Q ’=50000+×50000=51000N起升机构总效率η0=η7η5η1=××=故此电动机静功率05100087.876010000.864P kW ⨯==⨯⨯按式P jC Ke Po ≥g ,并取系数K e =,故相应于JC %=25%的电动机P jC =K e P 0=×= kW按[1]表4-3选ZD 141-4型锥形转子电动机,功率P jc = kW ,转速n jc =1400 r /min 。
3.选择钢丝绳按[1]式(4-1)计算钢丝绳的静拉力07510002602020.98Q Q N m η''===⨯ 按[1]式(4-3),钢丝绳的破断拉力[]05.5260201684000.85s n Q Q N ϕ⨯≥==g按[1]的标准[2]选用6×37钢丝绳,其直径d =,断面面积d =,公称抗拉强度σ=2000MPa ,破断拉力Q s =178500N 。
4.计算卷简直径按[1]式(4-4),卷筒计算直径D 0=ed =20×=310 mm按标准取D 0=300mm 。
按[1]式(4-6),卷筒转速50100010008216.98/min 3.14300vm n r D π⨯⨯===⨯5.确定减速器总传动比及分配各级传动比总传动比35140082.4516.98n i n '==≈ 这里n 3为电动机转速,r /min 。
分配各级传动比第一级传动比82 5.12516B AB A z i z === 第二级传动比62 3.87516C CD D z i z === 第三级传动比66 4.12516E EF F z i z === 这里Z A 、Z B 、Z C 、Z D 、Z E 和Z F 分别代表齿轮A 、B 、C 、D 、E 和F 的齿数。
电动葫芦设计

2 钢丝绳的选取(1)钢丝绳最大拉力F max根据设计要求,起重重量为0.5t ,按照构造宜紧凑的原则,选用滑轮组倍率:a=2。
N a F 294022.18.9500mgk max =⨯⨯==………………………(2.1)k :安全系数;取1.2。
(2)钢丝绳直径dm m 8.42940089.0d max =⨯==F C ………………………(2.2) C :选择系数;查[5]P8-10表8.1-8,取C=0.089。
(3)选取钢丝绳由表[1]8.1-11,选用钢丝绳的型号为:6x19+IWS ,右向捻。
图2.1 6x19+IWS 钢丝绳3 卷筒的尺寸确定及强度验算(1)卷筒选取由[5]P8-41表8.1-52,选用C 型卷筒结构 (JB/T9006.2-1999),单层单联卷筒。
图3.1 C 型卷筒结构(2)卷筒直径DD>=d(e-1)=4.8(25-1)=115.2………………………………(3.1) 取160mm(3)卷筒上有螺旋槽部分长L 0p z D aH L )max (100+⋅=π…………………………………………(3.2) mm 3667)68.164212000(=⨯+⨯⨯=πH max :最大起升高度;H max =12m 。
A :滑轮组倍率;a=2。
D 0:钢丝绳中心算起的卷筒直径;m m 8.1648.4160d 0=+=+=D D 。
Z 1:安全圈数; 1.5Z 1≥,取Z 1=6。
P :绳槽槽距;查[5]P8-39表8.1-49,取P=7mm 。
(4)卷筒总长L dm m 433212323662d 210=+⨯+=++=L L L L ……………(3.3)L 1:无绳槽卷筒端部尺寸;L1=23mm 。
L 2:固定钢绳所需长度;21m m 733P L 2=⨯==。
(5)卷筒壁厚δmm12mm 2.13~2.910~616002.0mm1210~602.0,取)()(=+⨯=∴≥+=δδD ………(3.4)(6)单层卷绕卷筒压应力'1σ[]bc MP p F A σδσ≤=⨯⨯=⋅=a 25.26712294075.0max 1'1 ……………(3.5)故安全。
机械产品综合课程设计-电动葫芦设计共50页

71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 7芦设计
31、园日涉以成趣,门虽设而常关。 32、鼓腹无所思。朝起暮归眠。 33、倾壶绝余沥,窥灶不见烟。
34、春秋满四泽,夏云多奇峰,秋月 扬明辉 ,冬岭 秀孤松 。 35、丈夫志四海,我愿不知老。
谢谢你的阅读
电动葫芦轨道课程设计

电动葫芦轨道课程设计一、课程目标知识目标:1. 学生能理解电动葫芦的基本结构、工作原理及轨道安装的相关知识。
2. 学生能掌握电动葫芦轨道安装的步骤、注意事项及安全操作规范。
3. 学生能了解电动葫芦在工业生产中的应用及其重要性。
技能目标:1. 学生能运用所学知识,正确安装和调试电动葫芦轨道。
2. 学生能通过实际操作,掌握电动葫芦轨道的检查和维护方法。
3. 学生能在小组合作中,发挥团队协作能力,共同完成轨道安装任务。
情感态度价值观目标:1. 学生能培养对工业设备操作的兴趣,激发学习热情。
2. 学生能认识到安全操作的重要性,增强安全意识。
3. 学生能在实际操作中,体会工匠精神,培养敬业、专注的品质。
4. 学生能在小组合作中,学会尊重他人,提高沟通与协作能力。
本课程针对初中年级学生,结合电动葫芦轨道的安装与操作,注重理论与实践相结合。
课程旨在帮助学生掌握电动葫芦轨道相关知识,培养实际操作技能,同时注重培养学生的安全意识、团队协作能力和敬业精神。
通过本课程的学习,使学生能够更好地适应未来工业生产领域的需求。
二、教学内容1. 电动葫芦的基本结构:介绍电动葫芦的组成部分,包括电动机、减速器、钢丝绳、吊钩、限位器等。
教材章节:第二章第一节2. 电动葫芦工作原理:讲解电动葫芦如何通过电动机、减速器等部件实现重物的起吊、移动。
教材章节:第二章第二节3. 轨道安装步骤及注意事项:详细讲解电动葫芦轨道的安装流程、安装方法以及安装过程中的注意事项。
教材章节:第三章第一节4. 安全操作规范:强调电动葫芦操作过程中的安全事项,包括操作前的检查、操作中的注意事项以及紧急情况的处理。
教材章节:第三章第二节5. 电动葫芦轨道的检查与维护:介绍轨道的日常检查、维护方法,确保设备正常运行。
教材章节:第四章6. 实践操作:组织学生进行电动葫芦轨道安装、操作练习,巩固所学知识,提高实际操作能力。
教材章节:第五章本教学内容根据课程目标,结合教材章节进行组织,保证教学内容的科学性和系统性。
电动葫芦轨道课程设计

电动葫芦轨道课程设计一、教学目标本课程旨在让学生了解电动葫芦轨道的基本原理和结构,掌握电动葫芦的操作方法和维护技巧,培养学生的动手能力和团队协作精神,提升学生对机械设备的认知和实际操作能力。
知识目标:使学生了解电动葫芦轨道的工作原理、主要部件和性能参数,掌握电动葫芦的操作方法和维护技巧。
技能目标:培养学生具备电动葫芦的基本操作能力,能够独立完成轨道安装、调试和维护任务。
情感态度价值观目标:培养学生对机械设备的兴趣和热情,增强学生的团队协作意识,提高学生面对挑战的勇气和信心。
二、教学内容本课程的教学内容主要包括电动葫芦轨道的基本原理、结构组成、操作方法、维护保养和故障处理等方面。
1.电动葫芦轨道的基本原理:介绍电动葫芦轨道的工作原理,使学生了解其主要部件和性能参数。
2.电动葫芦轨道的结构组成:讲解电动葫芦轨道的各个组成部分,帮助学生熟悉其结构。
3.电动葫芦的操作方法:教授学生电动葫芦的基本操作方法,包括起吊、放下、移动等。
4.电动葫芦的维护保养:传授电动葫芦的日常维护保养知识,指导学生如何确保设备正常运行。
5.电动葫芦故障处理:分析电动葫芦可能出现的故障,引导学生学会故障判断和处理方法。
三、教学方法为了提高教学效果,本课程将采用多种教学方法,如讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过讲解电动葫芦轨道的基本原理、结构组成等理论知识,使学生掌握相关概念。
2.讨论法:学生就电动葫芦操作方法、维护保养等方面的问题进行讨论,培养学生的思考和沟通能力。
3.案例分析法:分析实际案例,使学生了解电动葫芦在实际应用中可能遇到的问题及其解决方法。
4.实验法:安排实验室实践环节,让学生亲自动手操作电动葫芦,提高学生的动手能力和实际操作技能。
四、教学资源为了支持教学内容和教学方法的实施,本课程将采用以下教学资源:1.教材:选用权威、实用的电动葫芦轨道教材,为学生提供系统的理论知识。
2.参考书:提供相关领域的参考书籍,丰富学生的知识视野。
5.5吨电葫芦课程设计

5.5吨电葫芦课程设计一、课程目标知识目标:1. 学生能够理解电葫芦的基本概念、分类及其在工程中的应用。
2. 学生能够掌握5.5吨电葫芦的构造、工作原理及其相关技术参数。
3. 学生能够了解电葫芦操作的安全规程及维护保养方法。
技能目标:1. 学生能够操作5.5吨电葫芦,进行简单的起吊作业。
2. 学生能够根据实际需求,选择合适的电葫芦并进行初步的故障排除。
3. 学生能够运用所学知识,分析并解决电葫芦在工程应用中的问题。
情感态度价值观目标:1. 培养学生对电葫芦操作的兴趣,激发他们学习工程技术的热情。
2. 增强学生的安全意识,培养他们在实际操作中严谨、负责的态度。
3. 培养学生团队合作精神,提高他们在工程实践中的沟通与协作能力。
课程性质:本课程属于工程技术类课程,注重实践操作和理论知识相结合。
学生特点:初三学生,具有一定的物理知识和动手能力,对新技术和新设备充满好奇。
教学要求:结合学生特点,注重实践操作,让学生在实际操作中掌握知识,提高技能。
同时,强调安全意识,培养学生严谨、负责的态度。
在教学过程中,关注学生的情感态度价值观的培养,使他们在学习过程中形成正确的价值观。
通过分解课程目标为具体的学习成果,为后续教学设计和评估提供依据。
二、教学内容1. 电葫芦概述- 电葫芦的定义、分类及应用场景- 电葫芦在我国工程技术领域的发展现状2. 5.5吨电葫芦的构造与工作原理- 电葫芦的主要组成部分及其功能- 5.5吨电葫芦的工作原理及力学原理3. 电葫芦技术参数与选型- 电葫芦的主要技术参数解析- 根据实际需求选择合适的电葫芦4. 电葫芦的操作与安全规程- 电葫芦的操作步骤及注意事项- 电葫芦操作的安全规程及事故预防5. 电葫芦的维护保养与故障排除- 电葫芦的日常维护保养方法- 常见故障现象、原因及排除方法6. 实践操作与案例分析- 实际操作5.5吨电葫芦,进行起吊作业- 分析工程中电葫芦的应用案例,提高学生解决实际问题的能力教学内容安排和进度:第1-2课时:电葫芦概述、构造与工作原理第3-4课时:技术参数与选型、操作与安全规程第5-6课时:维护保养与故障排除、实践操作与案例分析三、教学方法为了提高教学效果,激发学生的学习兴趣和主动性,本课程将采用以下多样化的教学方法:1. 讲授法:教师通过生动的语言、形象的比喻和具体的案例,讲解电葫芦的基本概念、构造、工作原理等理论知识。
plc电动葫芦课程设计

plc电动葫芦课程设计一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本原理及其在电动葫芦中的应用。
2. 学生能够掌握电动葫芦的构造、工作原理和操作流程。
3. 学生能够了解并描述电动葫芦安全操作规程及相关电气知识。
技能目标:1. 学生能够独立完成PLC编程,实现对电动葫芦的基本控制。
2. 学生通过实际操作,能够正确、熟练地使用电动葫芦,并处理简单的故障。
3. 学生能够运用所学知识,设计简单的电动葫芦控制电路。
情感态度价值观目标:1. 培养学生对工业自动化设备的兴趣,激发他们学习先进制造技术的热情。
2. 强化学生的安全意识,树立正确的劳动态度,认识到规范操作的重要性。
3. 培养学生的团队协作能力,通过小组活动,理解合作与交流在解决问题中的价值。
课程性质分析:本课程为高年级工程技术类课程,强调理论联系实际,注重实践操作能力的培养。
学生特点分析:学生具备一定的电学基础和逻辑思维能力,对实际操作有较高的兴趣。
教学要求:结合PLC电动葫芦的实际应用,使学生在掌握专业知识的同时,提升实际操作和问题解决能力,确保教学内容的实用性。
通过具体的学习成果分解,为教学设计和评估提供明确的标准。
二、教学内容1. PLC基本原理与编程:介绍PLC的工作原理、结构组成及其在工业控制中的应用,重点讲解PLC的编程语言和编程方法。
教材章节:第三章“PLC基础”2. 电动葫芦构造与工作原理:详细解析电动葫芦的机械结构、电气控制系统,阐述其工作原理及性能特点。
教材章节:第四章“电动葫芦”3. 电动葫芦操作与维护:教授电动葫芦的正确操作方法、安全操作规程及日常维护保养知识。
教材章节:第五章“电动葫芦的操作与维护”4. PLC在电动葫芦控制中的应用:通过实例分析,讲解PLC在电动葫芦控制电路中的应用,指导学生进行PLC编程实践。
教材章节:第六章“PLC在电动葫芦控制中的应用”5. 实践操作与故障处理:组织学生进行实际操作训练,模拟电动葫芦运行过程中可能出现的故障,教授故障排查和处理方法。
2t电葫芦课程设计

2t电葫芦课程设计一、课程目标知识目标:1. 学生能理解电葫芦的基本概念、结构和原理;2. 学生能掌握电葫芦电路的组成、连接方式及工作原理;3. 学生能了解电葫芦在实际应用中的安全操作规程。
技能目标:1. 学生能够正确使用工具和仪器进行电葫芦的组装和调试;2. 学生能够分析电葫芦电路故障,并提出合理的解决方案;3. 学生能够运用所学知识,设计简单的电葫芦控制系统。
情感态度价值观目标:1. 培养学生对电葫芦技术的兴趣,激发创新意识;2. 培养学生安全意识,使其明白安全操作的重要性;3. 培养学生团队协作精神,提高沟通与交流能力。
课程性质:本课程为实践性较强的课程,结合理论知识,注重培养学生的动手能力和实际操作技能。
学生特点:学生具备一定的物理和电学基础知识,对实际操作有较高的兴趣。
教学要求:教师应充分运用讲授、示范、指导等教学手段,引导学生主动参与,确保课程目标的实现。
同时,将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 电葫芦概述- 电葫芦的定义、分类及用途- 电葫芦的结构组成及工作原理2. 电葫芦电路分析- 电路的组成及连接方式- 控制电路原理及功能- 故障分析与处理方法3. 电葫芦的安装与调试- 安装工具及仪器使用方法- 安装步骤及注意事项- 调试方法及故障排查4. 电葫芦安全操作规程- 安全操作重要性及基本要求- 安全防护装置的作用及使用方法- 应急处理措施及事故预防5. 电葫芦控制系统的设计- 控制系统设计原理及步骤- 常用控制元件的选择与应用- 简单控制电路的设计与实现教学内容安排和进度:第一课时:电葫芦概述第二课时:电葫芦电路分析第三课时:电葫芦的安装与调试第四课时:电葫芦安全操作规程第五课时:电葫芦控制系统的设计教材章节关联:本教学内容与教材中“电动机控制技术与应用”章节相关,涵盖了电葫芦的原理、安装、调试、安全操作及控制系统设计等内容,确保了教学内容的科学性和系统性。
电动葫芦设计课程设计

电动葫芦设计课程设计一、课程目标知识目标:1. 学生能理解电动葫芦的基本结构、工作原理及设计要点。
2. 学生能掌握电动葫芦电路的连接方法及相关电气知识。
3. 学生了解电动葫芦在工程应用中的重要性及适用场景。
技能目标:1. 学生能运用所学知识,设计出符合实际需求的电动葫芦。
2. 学生能通过实际操作,完成电动葫芦的组装和调试。
3. 学生具备分析和解决电动葫芦使用过程中出现问题的能力。
情感态度价值观目标:1. 学生培养对工程设计和科技创新的兴趣,激发探索精神。
2. 学生树立安全意识,关注电动葫芦使用过程中的安全问题。
3. 学生学会团队合作,培养沟通与协作能力。
本课程针对高年级学生,结合电动葫芦设计的相关知识,注重理论联系实际,提高学生的动手操作能力和创新能力。
课程目标具体、可衡量,旨在使学生能够明确学习成果,为后续教学设计和评估提供依据。
二、教学内容1. 电动葫芦基本结构:介绍电动葫芦的主要组成部分,包括电机、减速器、卷筒、钢丝绳、吊钩等,分析各部分的功能和相互关系。
2. 工作原理及设计要点:讲解电动葫芦的工作原理,探讨设计过程中需关注的关键因素,如承载能力、安全系数、运行速度等。
3. 电动葫芦电路连接:学习电动葫芦的电路连接方法,掌握控制电路、主电路的构成及功能。
4. 电动葫芦应用及安全:分析电动葫芦在实际工程中的应用场景,强调使用过程中的安全注意事项,提高学生安全意识。
5. 设计实践:结合所学知识,指导学生进行电动葫芦设计,包括选型、计算、绘图等环节。
6. 组装与调试:教授电动葫芦的组装方法,组织学生进行实际操作,并进行调试,确保电动葫芦正常运行。
教学内容参照教材相关章节,结合课程目标进行科学组织和安排。
教学大纲明确,进度合理,确保学生在掌握理论知识的基础上,提高实践操作能力。
三、教学方法1. 讲授法:在电动葫芦基本结构、工作原理及设计要点等理论知识的教学中,采用讲授法,配合多媒体演示,使抽象知识形象化,便于学生理解。
电动葫芦直尺课程设计

电动葫芦直尺课程设计一、课程目标知识目标:1. 学生能理解电动葫芦直尺的基本结构,掌握其工作原理;2. 学生能够描述电动葫芦直尺在工程测量中的应用;3. 学生能掌握电动葫芦直尺的使用方法,包括安装、调试和操作;4. 学生能够运用电动葫芦直尺进行线性测量,并准确读取数据。
技能目标:1. 学生能够独立操作电动葫芦直尺,进行实际测量;2. 学生能够分析测量数据,解决简单的工程测量问题;3. 学生能够对电动葫芦直尺进行基本的维护和故障排除。
情感态度价值观目标:1. 学生培养对工程测量的兴趣,增强实践操作的自信心;2. 学生树立正确的工程测量观念,认识到测量在工程中的重要性;3. 学生能够遵循测量规范,培养严谨、细致的工作态度;4. 学生在团队合作中,学会相互尊重、沟通与协作。
本课程针对五年级学生设计,结合学科特点和教学要求,注重理论与实践相结合。
通过本课程的学习,学生能够掌握电动葫芦直尺的相关知识和操作技能,提高解决实际问题的能力,培养对工程测量的兴趣和严谨的工作态度。
课程目标具体明确,可衡量,为后续教学设计和评估提供依据。
二、教学内容1. 电动葫芦直尺的结构与原理- 介绍电动葫芦直尺的组成部分;- 解释电动葫芦直尺的工作原理;- 分析电动葫芦直尺在工程测量中的应用优势。
2. 电动葫芦直尺的使用与操作- 讲解电动葫芦直尺的安装与调试方法;- 演示电动葫芦直尺的操作步骤;- 强调操作过程中的注意事项及安全规范。
3. 线性测量与数据处理- 掌握线性测量的基本方法;- 学习使用电动葫芦直尺进行线性测量;- 介绍测量数据的记录、整理和分析方法。
4. 电动葫芦直尺的维护与故障排除- 了解电动葫芦直尺的日常维护保养方法;- 学习简单的故障排除技巧;- 强调维护与故障排除在保证测量精度和设备使用寿命方面的重要性。
教学内容依据课程目标,紧密结合教材,保证科学性和系统性。
教学大纲明确,教学内容安排合理,进度适中。
通过本章节的学习,学生能够全面掌握电动葫芦直尺的相关知识和技能,为实际应用打下坚实基础。
代做电葫芦课程设计

代做电葫芦课程设计一、课程目标知识目标:1. 学生能够理解电葫芦的基本概念、结构原理和工作原理;2. 学生能够掌握电葫芦的主要部件及其功能;3. 学生能够了解电葫芦在工程实践中的应用。
技能目标:1. 学生能够正确操作电葫芦,完成提升和搬运重物的任务;2. 学生能够根据实际需求,选择合适的电葫芦型号并进行安装;3. 学生能够对电葫芦进行简单的故障排除和维护。
情感态度价值观目标:1. 培养学生对电葫芦操作的兴趣,激发学习热情;2. 培养学生的安全意识,使其在操作电葫芦时能够遵循安全规程;3. 培养学生的团队协作精神,使其在实践操作中能够与他人相互配合、共同完成任务。
课程性质:本课程为实践性课程,注重培养学生的动手操作能力和实际应用能力。
学生特点:学生处于初中阶段,具有一定的物理知识基础,好奇心强,喜欢动手操作。
教学要求:结合学生特点,课程设计应注重理论与实践相结合,强调操作安全,提高学生的实践技能和综合素养。
通过具体的学习成果分解,使学生在课程学习中获得实际操作经验,为未来的工程实践打下基础。
二、教学内容1. 电葫芦概述- 电葫芦的定义、分类及用途- 电葫芦的发展历程及现状2. 电葫芦的结构与原理- 电葫芦的主要部件及其功能- 电葫芦的工作原理及电路原理3. 电葫芦的操作与使用- 电葫芦的安装、调试与操作方法- 电葫芦的安全操作规程及注意事项- 电葫芦搬运重物的实际操作演练4. 电葫芦的选型与维护- 电葫芦型号的识别与选择- 电葫芦的日常维护与故障排除5. 电葫芦在工程实践中的应用案例- 电葫芦在不同场合的应用案例介绍- 分析案例中电葫芦的作用及优势教学内容安排和进度:第一课时:电葫芦概述、结构与原理第二课时:电葫芦的操作与使用第三课时:电葫芦的选型与维护第四课时:电葫芦在工程实践中的应用案例教学内容与课本关联性:本章节教学内容与物理课本中有关简单机械、电路原理等知识相关,通过实际操作电葫芦,使学生将理论知识与实际应用相结合,提高学生的实践能力。
机械产品综合课程设计-电动葫芦设计

式中的Rdm和Rdn应代 入相应的正负号。
图4-9 力的坐标变换
下一页
这样,Rdx和Rdy就与齿轮F上的作用力及重物对输出轴Ⅳ的作 用力处在同一坐标系统内。这就可以在xdy坐标系统内进行力 的分析和计算。 轴Ⅱ和轴Ⅲ的作用力分析可按上述方法参照进行。
下一页
三、实例 [例题4-1]根据下列条件设计电动葫芦起升机构的齿轮减速器。 已知:额定起重量Q=5t,起升高度H=6m,起升速度v=8m/ min,工作类型为中级:JC%=25%,电动葫芦用于机械加工 车间,交流电源(380V)。
0.5
1
6,9,12
8
8
20
20
4.8
7.4
0.8
1.5
2
3
6,9,12,18,24, 30
8
8
20
20
11
13
6×37(GB1102-74)
三相交流380V 50Hz
中级JC25%
3.0
4.5
5
10
9,12,18,24,30
8 20 15.5
7 20 15.5
7.5
13
1380
1380
1380
1380
2.按齿根弯曲强度条件设计 ………………
卷筒转速
(4-6)
这里v为起升速度(m/min), 其余符号含义同前。
图4-5卷筒直径下一页
3.选择起重电动机 起重电动机的静功率
式中Q“——总起重量N; v——起升速度,m/min;
η0——起升机构总效率; η7——滑轮组效率,一般η7=0.98~0.99; η5——卷筒效率,η5=0.98; η1——齿轮减速器效率,可取为0.90~0.92。 为保证电动机的使用性能,并满足起重机的工作要求,应选择相应于 电动葫芦工作类型(JC%值)的电动机,其功率的计算公式为:
电动葫芦控制课程设计

电动葫芦控制课程设计一、课程目标知识目标:1. 学生能理解电动葫芦的基本结构及其工作原理,掌握相关术语。
2. 学生能描述电动葫芦控制系统中的主要部件功能及其相互关系。
3. 学生能掌握电动葫芦控制电路的原理图解读,了解电路元件的作用。
技能目标:1. 学生能够运用所学的电动葫芦知识,进行简单的控制程序编写与调试。
2. 学生通过小组合作,能够完成电动葫芦控制电路的搭建,并进行故障排查。
3. 学生能够运用相关工具和设备,进行电动葫芦的安全操作。
情感态度价值观目标:1. 培养学生对电动葫芦控制系统操作的兴趣,激发其探究精神和动手实践欲望。
2. 增强学生的团队合作意识,培养在团队中相互尊重、协作解决问题的能力。
3. 强化学生的安全意识,使其在操作过程中始终遵循安全规程,养成安全操作的习惯。
课程性质:本课程为实践性较强的课程,结合理论知识与实践操作,培养学生的动手能力与问题解决能力。
学生特点:学生处于初中年级,具有较强的求知欲和动手欲望,但需注重引导规范操作,确保安全。
教学要求:教师应结合学生特点,注重理论与实践相结合,以学生为主体,引导学生主动探究,培养其创新精神和实践能力。
在教学过程中,关注学生个体差异,鼓励学生互帮互助,共同提高。
通过课程学习,使学生达到预定的学习成果,为后续学习奠定基础。
二、教学内容1. 电动葫芦基本结构及工作原理:介绍电动葫芦的组成部分,包括电动机、减速器、钢丝绳、吊钩等,并解析其工作原理。
相关教材章节:第一章第一节2. 电动葫芦控制系统部件功能:详细讲解控制系统中的主要部件,如控制器、限位器、过载保护器等,并阐述各部件的作用。
相关教材章节:第一章第二节3. 控制电路原理图解读:教授学生如何阅读电动葫芦控制电路原理图,认识电路中的主要元件及其作用。
相关教材章节:第二章第一节4. 控制程序编写与调试:指导学生根据实际需求,编写电动葫芦控制程序,并进行调试。
相关教材章节:第二章第二节5. 电动葫芦控制电路搭建与故障排查:组织学生分组进行控制电路的搭建,并学会排查常见故障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计说明书课程名称:机械综合课程设计设计题目:钢丝绳电动葫芦起升用减速器设计课程设计时间:指导教师:班级:学号:姓名:目录1 题目分析 (3)2 设计计算 (3)1)电动机的确定 (3)2)总体设计计算 (4)3 齿轮的设计计算及校核 (6)1)第一对齿轮的设计与校核 (6)2)第二对齿轮的设计与校核 (11)3)第三对齿轮的设计与校核 (15)4 轴的设计及危险轴的校核 (19)5 课程设计总结 (22)6 参考文献 (22)1 题目分析电动葫芦是一种常用的搬运设备,在工厂中使用十分广泛。
电动葫芦由两部分组成,即行走机构和提升机构。
下面分别介绍各组成部分。
1.行走机构组成:行走电动机、传动机构两部分组成。
2.提升机械组成:提升电动机、卷扬机构、机械制动器(一般为盘式制动器)。
3.制动器介绍:电动葫芦(或起重机)的提升机构一定要有机械制动装置,当物体起吊到一定高度后全靠机械制动器将其制停在空中。
制动器的工作机理有液压驱动、气压驱动和牵引电磁铁驱动。
不同的驱动方式其制动的性能也不相同。
在小型电动葫芦上一般采用电磁驱动制动器。
电动葫芦(或起重机)上提升机构采用的制动器种类繁多,在小型电动葫芦上较多采用的制动器是盘式制动器,盘式制动器又称为碟式制动器。
盘式制动器重量轻、构造简单、调整方便、制动效果稳定。
为了安全起见,在起重设备上一般均采用常闭式制动器。
所谓常闭式是指在电磁机构不得电的情况下,制动器处于制动状态。
制动器安装在电动机的一端,一般情况是封闭的,用眼晴直接是看不到的,但这没有关系,一般会将牵引电磁铁的线圈引出线留在外面。
我们只要将线圈接正确就行。
当电动机得电的同时(接触器吸合时),制动器的牵引电磁铁也同时得电,制动器打开。
这种联接方式的优点是,当发生停电事故时可以立即进行制动以避免事故的发生。
其缺点是制动瞬间设备的机械抖动较大。
2 设计计算1)电动机的确定由公式得:P=FV/1000=GV/1000=10000×(4/60)/1000=0.67kwⅠ与电机Ⅱ与ⅠⅢ与Ⅱ输出轴与Ⅲ筒与输出轴总ηηηηηη==0.96×(0.99×0.99)×(0.99×0.99)×(0.99×0.99)×0.98 =0.8857 电动机功率:d p =w p /总η=0.67/0.8857=0.75266kw由于钢丝绳电葫芦起吊和停止时有一些冲击,根据冲击程度一般使用系数A k =1.4故p ≥1.4d p =1.0537kw电机转速取:n 电=1380r/min由于功能需要,采用锥形转子电机。
2)总体设计计算(1)总传动比及各级传动比的确定由于电动葫芦吊钩为一动滑轮装置,钢丝绳一段固定,一段被卷筒缠绕,所以卷筒钢丝绳的受载仅为起重量的一半,但钢丝绳的速度为起重速度的两倍。
卷筒转速:卷筒n =2L v /πd (L v 为起升速度)由于起重速度误差不超过百分之五, 即单位时间钢丝上升速度为:2L v ×(1±0.05)=8±0.4m/min (采用一段固定的动滑轮结构)故卷筒转速 卷筒n =2L v ×(1±0.05)/πd=26.526±1.326即25.2r/min ≤卷筒n ≤27.852r/min传动比总u =电机n /卷筒n =1380/(26.526±1.326)即49.55≤总u ≤54.76 取总u =54.76单级传动比u 取3至5故采用三级外啮合定轴齿轮减速设计,每级传动比大概为4,分配各级传动比:u 1=4,u 2 =3.7,u 3=3.7(2) 运动及动力参数的计算计算各轴的转速: 0轴: n 0= n 电机=1380r/minⅠ轴: n Ⅰ=1380r/min Ⅱ轴: n Ⅱ=345 r/min Ⅲ轴: n Ⅲ=93.243 r/min Ⅳ轴: n Ⅳ=25.2 r/min Ⅴ轴: n V =25.2 r/min计算各轴的输入功率: 0轴: P 0=1.0537kwⅠ轴: P Ⅰ= P 0Ⅰ与电机η=1.032626kw Ⅱ轴: P Ⅱ= P ⅠⅡ与Ⅰη=1.012kw Ⅲ轴: P Ⅲ= P ⅡⅢ与Ⅱη=0.99186kw Ⅳ轴: P Ⅳ= P Ⅲ输出轴与Ⅲη=0.972kw Ⅴ轴: P Ⅴ= P Ⅳ筒与输出轴η=0.93312kw计算各轴的输入转矩: 0轴: T 0=9.55×610n p =7291.9 Nmm Ⅰ轴: T 1=9.55×61011n p =7146.07 Nmm Ⅱ轴: T 2=9.55×61022n p =28013.3 Nmm Ⅲ轴: T 3=9.55×61033n p =101586.5887 NmmⅣ轴: T 4=9.55×61044n p =368345.2913 Nmm Ⅴ轴: T 5=9.55×61055n p =353611.4797 Nmm现将各轴的运动和动力参数结果整理于表中,具体见表运动和动力参数表3 齿轮的设计计算及校核1)第一对齿轮的设计与校核1. 选定齿轮类型、精度等级、材料及齿数(1)传动方案可选用斜齿圆柱齿轮传动。
(2)此电葫芦升降机为一般重载工作机器,速度不高,齿轮用7级精度即可。
(3)所设计的齿轮可选用便于制造且价格便宜的材料由[1]P191机械设计表10—1选取:小齿轮材料为40Cr ,1HB =280; 大齿轮材料为45号钢,2HB =240。
1HB —2HB =40,合适。
(4)选取小齿轮齿数z 1=20;大齿轮齿数z 2=uz 1=80(5)选取螺旋角。
初选螺旋角β=14°按齿面接触疲劳强度条件设计,然后校核齿根弯曲疲劳强度,最后作齿轮的结构设计。
2.按齿面接触疲劳强度设计由强度计算公式总表查得设计公式为()[]32H H E d 1t 1t σZ Z u 1u ψT 2K d ⎪⎪⎭⎫⎝⎛±≥αε(1)确定公式内的各计算数值试选Kt =1.6由图10-30选取区域系数H Z =2.433由图10-26差得1αε=0.78,2αε=0.87,则αε=1αε+2αε=1.65T t =95.5×105P1/n1=95.5×105×1.032626/1380 N ·mm =7146.07N ·mm由[1]P205表10—7选取φd =1(两支撑相对于小齿轮做非对称布置) 由[1]P201表10-6查得材料的弹性影响系数为Z E =189.8MPa由[1]P209图10-21按齿面硬度查得小齿轮的接触疲劳强度极限为σlim1=600MPa ,σlim2=550 MPa 。
由公式 N=60njL hN 1=60×1380×1×(3200)=2.6496×108 N 2=N 1/u =2.6496×108/4=0.6624×108图10-19查得接触疲劳强度K HN1=0.90 K HN2=0.95 计算接触疲劳应力取失效概率为1%,安全系数S=1 []1H σ= K HN1·σlim1/S =0.9×600/1=540 MPa. []2H σ= K HN2σlim2/S =0.95×550=522.5 MPa[]H σ=[][]221H H σσ+=25.522540+=531.25 MPa(2)计算1)计算小齿轮分度圆直径d1t 代入[ó]中较小的值()[]32H H E d 1t 1t σZ Z u 1u ψT 2K d ⎪⎪⎭⎫⎝⎛±≥αε=3225.5312.433189.84565.117146.071.62⎪⎭⎫ ⎝⎛⨯⨯⨯⨯⨯⨯=23.567mm2)计算圆周速度11601000t d n πυ==⨯1000601380567.2314.3⨯⨯⨯=1.7m/s3)计算齿宽b 及模数m t1d b d φ==1×23.567mm=23.567mmm t =11t z cos d β=2014cos 23.567︒⨯=1.1433mm 计算齿宽与齿高之比b /h 齿高h=2.25m t =2.57mmb/h =9.174)计算纵向重合度βε=0.318φd 1z tan β=1.5857 5)计算载荷系数根据v =1.7m/s,7级精度,由[1]P194图10-8查得动载荷系数Kv =1.05。
斜齿轮,由[1]P195表10-3查得K Ha1=K Fa2=1.4 由[1]P193表10-2查得使用系数K A =1由[1]P196表10-4查得7级精度,小齿轮相对支承非对称布置时 K HB =1.12+0.18(1+0.6φd 2) φd 2+0.23×10-3b将数据代入得K HB =1.12+0.18×(1+0.6×12)×12+0.23×10-3×23.567=1.4134 由b/h=9.17, K HB =1.4134 ,查图10-13得K FB =1.3 故载荷系数K=K A K v K Ha K HB =1×1.05×1.4×1.4134=2.0786)按实际的载荷系数校正所算得的分度圆直径1d =1t d (K/Kt)1/3= 23.567×(2.078/1.6)1/3=25.713mm7)计算模数m =11z cos d β=2014cos 25.713︒⨯=1.247mm3.按齿根弯曲强度的设计由[1]P216式10-17得弯曲强度的设计公式为m n ≥[]3F 2121z cos 2KT σεβαβSaFa d Y Y Y •Φ(1) 确定计算参数1)由[1]P208图10-20查得小齿轮的弯曲疲劳强度极限σFE1=500Mpa大齿轮的弯曲疲劳强度极限σFE2=380MPa2)由[1]P206图10-18查得弯曲疲劳寿命系数K FN1=0.85 K FN2=0.88 3)计算弯曲疲劳许用应力取弯曲疲劳安全系数S =1.4,由式10-12得[]1F σ= KFN1σFE1/S =303.57MPa []2F σ= K FN2σFE2/S =238.86 MPa4)计算载荷系数KK=K A K v K Fa K FB =1×1.05×1.4×1.3=1.9115)根据纵向重合度βε =1.5857,从图10-28查得螺旋角影响系数βY =0.88 6)计算当量齿数。