SAE J1939使用说明3
J1939中文资料3

(SAE1939-15:2003 MOD )国家标准化管理委员会ICSGB/T XXXX.3-XXXX商用车控制系统局域网络(CAN )通信协议第3分:物理层—非屏蔽双绞线(250K 比特/秒)(征求意见稿)20xx-xx-xx 发布20xx-xx-xx 实施GB/T XXXX.3-XXXX前言GB/T××××《商用车控制系统局域网络(CAN 总线)通信协议》包括10个部分:—第1部分:物理层—屏蔽双绞线(250K比特/秒)—第2部分:物理层—非车载诊断连接器—第3部分:物理层—非屏蔽双绞线(250K比特/秒)—第4部分:数据链路层—第5部分:应用层—车辆—第6部分:应用层—诊断—第7部分:网络管理—第8部分:参数组分配—第9部分:地址和标识分配—第10部分:可疑参数编号(SPN)—第11部分:网络层本部分为GB/T××××的第3部分,对应于SAE 1939-15:2003《物理层,非屏蔽双绞线》,本部分与SAE1939-15的一致性程度为修改采用(技术内容完全等同),主要差异如下:—按1.1规定增加了”前言”、“范围”。
—进行了编辑性修改。
本部分由全国汽车标准化技术委员会提出。
本部分由全国汽车标准化技术委员会归口。
本部分由负责起草。
本部分主要起草人:GB/T XXXX.3-XXXX 汽车控制系统局域网络(CAN 总线)通信协议第3部分:物理层—非屏蔽双绞线(250千比特/秒)1 范围本部分规定了CAN 总线的物理层—非屏蔽双绞线(250K比特/秒)的电气性能参数等。
本部分适用于M2、M3、N及L类车辆,其他车辆可参考。
2 规范性引用文件下列文件中的条款通过本部分的引用而成为本部分的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本部分,然而鼓励根据本部分达成协议的各方研究是否可使用这些文件的最新版本。
saej1939协议(中文)
竭诚为您提供优质文档/双击可除saej1939协议(中文)篇一:saej1939协议saej1939协议_综述(转载)发表于20xx/10/2611:16:06saej1939协议是由美国汽车工程师协会——卡车和公共汽车电气电子委员会下的卡车和公共汽车控制和通讯网络分委员会制定的高层can网络通讯协议。
它主要用于为重型道路车辆上电子部件间的通讯提供标准的体系结构[1]。
1saej1939协议构成文件saej1939协议包括如下几部分内容:saej1939-11物理层,250kbits/s,屏蔽双绞线saej1939-13物理层,离线诊断连接器saej1939-15简化的物理层,250kbits/s,非屏蔽双绞线saej1939-21数据链路层saej1939-31网络层saej1939-71车辆应用层saej1939-73应用层-诊断saej1939-81j1939网络管理协议-----------------------------------------------------------------------------------2各层协议的功能2.1物理层saej1939的物理层规范包含saej1939-11(物理层,250kbits/s,屏蔽双绞线)、saej1939-15(简化的物理层,250kbits/s,非屏蔽双绞线)和saej1939-13(物理层,离线诊断连接器)三部分。
其中saej1939-11和saej1939-15给出了物理层为屏蔽双绞线和非屏蔽双绞线时的网络物理描述、功能描述、电气规范、兼容性测试、总线错误讨论。
而saej1939-13(物理层,离线诊断连接器)则定义了离线诊断连接器的通用需求、性能需求和物理需求。
2.2数据链路层saej1939的数据链路层在物理层之上提供了可靠的数据传输功能。
通过数据链路层的组织,发送的can 数据帧具有必需的同步、顺序控制、错误控制和流控制等功能。
J1939协议应用设计编程说明

J1939协议应用设计编程说明一、J1939协议简介J1939协议是目前在大型汽车中应用最广泛的应用层协议,可达到250Kbit/s的通讯速率。
J1939协议由美国SAE( Society of Automotive Engineer)组织维护和推广。
J1939协议具有如下特点:(1)以CAN2.0B协议为基础,物理层标准与ISO11898规范兼容并采用符合该规范的CAN 控制器及收发器。
通讯速率最高可达到250Kbit/s。
(2)采用PDU( Protocol Data Unit协议数据单元)传送信息,每个PDU相当于CAN协议中的一帧。
由于每个CAN帧最多可传输8个字节数据,因此PDU的传输具有很高的实时性。
(3)利用CAN2.0B扩展帧格式的29位标志符定义每一个PDU的含义及该PDU的优先级。
(4)J1939协议主要作为汽车中应用的通讯协议,对汽车中应用到的各类参数都进行了规定。
参数的规定符合ISO11992标准。
二、J1939协议通讯报文内容解析J1939协议实质是将CAN扩展帧格式中未明确定义的11位ID,18位扩展ID进行了明确定义,紧随ID的是8个字节的数据。
为了实现J1939协议报文的正确接收,必须首先明确其仲裁场(如上所示)是如何确定的。
下面将逐一介绍:优先级:29位标志符的前3位用于在仲裁过程中决定报文的优先级P。
值000是最高的优先级。
高的优先级用于高速要求的报文。
低的优先级用于时间要求不紧迫的数据。
标志符位(R):保留位。
在传输报文时此位置为0。
此位留作将来SAF委员会定义其它目的使用。
数据页( DP)位:DP位用于选择两页参数组中的其中一页。
0页包含现在被定义的所有报文。
1页预备将来额外的扩展能力。
在0页用完后才被分配。
PDU格式(PF):PDU代表协议数据单元。
PF场识别能被传送的两个PDU格式。
SRR和IDE位:在CAN 2. 0B己被详细定义。
它们被置为隐性位。
标准范本-SAEJ1939教学文档
13
物理层-电气特性
与总线断开的 ECU 的交流参数
参数 位时间
符号 最小值 额定值 最大值 单位 tB 3.998 4.000 4.002 μs
条件 250kbit∕s
内部延迟时间 tECU 0.0
0.9
μs
内部电容值
Cin
0
50
100
pF
250kbit/s , CAN _ H和 CAN_L 相对于地
OSI模型:即开放式通信系统互联参考模型(Open System Interconnection),是国际标 准化组织(ISO) 1984年提出的一个网络互连模型,分七层 功用:提供一个标准的规范,对应各层功能来制定协议
7
大纲
SAE J1939概述 物理层(SAE J1939-11) 数据链路层(SAE J1939-21) 网络层(SAE J1939-31) 应用层(SAE J1939-71) 故障诊断(SAE J1939-73) 网络管理层(SAE J1939-81) 应用实例
总线电平:隐性(1)和显性(0)
VCAN _H VCAN_L
Vdiff
11
物理层的几个概念
内部电阻 内部电容 差动内部电阻 差动内部电容
12
物理层的几个概念
位时间tB:一比特的持续时间,本标准对应于 250kbit/s 位时间是 4μs
标准位时间
同步段
传播段 相位缓冲段1 相位缓冲段2
采样点
同步段:同步总线上的不同 ECU 传播段:补偿网络中由于总线传播时间和 ECU 内部延迟 时间造成的物理延迟时间 相位缓冲段:补偿边沿的相位误差 采样点:指读取并解释总线上各位值的一个时间点
实现方式:由半导体厂家以及其他元器件生产厂家提供器件 来实现。
SAE_J1939介绍

2、格式简述 消息格式遵循CAN 规范。本标准参考的 CAN 规范是1991 年9 月的“CAN2.0B”。 但本标准与CAN 规范有一定的差别。 “CAN 2.0B”包括两种消息格式:标准帧 (11位)和扩展帧(29位)。采用本标准的设备 必须使用扩展帧格式。
3、格式
3.1、消息/帧格式
3.2参数组编号(PGN)
3.3协议数据单元(PDU)
定义:P 是优先级,R 是保留位,DP 是数据页,PF 是 PDU 格式,PS 是特定PDU,SA 是源地址。
注:当PF<240时(PDU1) :PS为目标地址(DA) 当PF≥240时(PDU2) :PS为组扩展域(GE)
PDU就是帧的仲裁段,见下图:
3.4诊断故障代码(DTC)
在识别CAN 数据帧的数据域属于哪个参数组时, 需要一个24 位的值。包括:高6位固定为0(6 位)、保留位R(1位)、数据页位DP(1位)、 PDU 格式域PF(8 位)和组扩展域PS(8位)。 名称:固定为0 位: 23-18 R 17 DP PF 16 15-8 PS 7-0
注:当PF<240时:PS为0 当PF≥240时:PS为组扩展域
二、数据链路层 1、符号缩写的含义
ACK BAM CAN CRC CTS DA DLC DP EOF ID IDE LLC LSB MAC MF MSB NA 确认 广播公告消息 控制器局域网 循环冗余码校验 清除发送 目标地址 数据长度码 数据页 帧结束 标识符 标识符扩展位 逻辑链路控制 最低有效字节或位 介质访问控制 制造商 最高有效字节或位 禁用 NACK P PDU PF PGN PS GE DA R RTR SA SOF SRR TP Th Tr un 否定 优先级 协议数据单元 PDU 格式 参数组编号 特定PDU 组扩展 目标地址 保留 远程传输请求 源地址 帧起始 代用远程请求 传输协议 保持时间 响应时间 未定义
CAN SAE J1939用户指南:NOVOtechnik SIEDLE GRUPPE 旋转磁敏感器

Content1CAN SAE J1939 11.1J1939 Interface Description 11.2Address Claiming (ACL) 11.3Device Name / Name Field 21.4PGN Default Definitions 21.4.1Process Data - Message Content PGN 65450 21.4.2Definition of the Signals (SLOT) 21.5Configuration Data - Parameter Mode PGN 61184 + Source Address 31.6Response PGN 65452 41.7Request Commands 41.7.1Name Identification PGN 60928 0x00EE00 51.7.2Process Data Message PGN 65450 0x00FFAA 51.7.3Software Identification PGN 65242 0x00FEDA 51.7.4Component Identification PGN 65259 0xFEEB00 51.8Diagnosis 61.8.1Process Data in Error Case 61.8.2Sensor Status 61.9Network Termination 61.10Abbreviations 61.11Document Changes 6 1 CAN SAE J19391.1 J1939 Interface DescriptionThe J1939 interface uses the 29 bits CAN-ID according ISO 11898. The identifier contains the following generalinformation:The entire frame format PDU contains the identifier (29 bits) and the data section (8 byte):1.2 Address Claiming (ACL)Dynamic address claiming is supported. The sensor starts the claiming with the default source address128.If an address conflict with a higher prior source address occurs, the network management will increase thesource address automatically by 1 until 247 is reached. If no free source address is available, the sensorwill use address 255 and does not actively send data onto the bus, it can only be addressed using broad-cast messages.The new claimed address is used temporary only. After power on, the default source address is 128 again.For use in networks with fixed address assignment, the dynamic address claiming can be deactivated and thestart address can be changed by the user with the command "set start address" to the desired source address(128 ... 247, see chapter 1.5 Configuration Data).The new start address remains even after power off if using the command "Store PGN Configuration".1.3 Device Name / Name FieldData in the Name field is not changeable by the user.1.4 PGN Default Definitions1.4.1 Process Data - Message Content PGN 65450After the sensor has claimed a source address, the measured position values will be sent automaticallywith a "Proprietary B" PGN message.It is also possible to request the process data message (Configuration PGN and Reponse PGN see chap-ter 1.5 and 1.6) .The process data message PGN 65450 contains the process data Rotary Position (P), Velocity (V), Revo-lution Counter (U) and Status.1.4.2 Definition of the Signals (SLOT)Position values:Data length 16 bits (unsigned value)Resolution Configurable: Range/Resolution (e.g. 360°/14 bits = 0,022° / bit)Range 0 … 360°Offset 0 °Transfer Function Position [°] = (Data * Resolution) - OffsetVelocity values:Data length 12 bits (signed value)Resolution Configurable: Range/Resolution/ms / bitMin. 1 LSB = 0,055°/s up to 1 LSB = 2,2°/sRange Min. -18,75 ... 18,75 rpm up to -750 ... 750 rpmTransfer Function Velocity [°/ms] = (Data * Resolution)Revolution counter values:Data length PVU: 32 bits (signed value), PPU: 24 bits (signed value)Resolution 1 turn/bitRange PVU: -2.147.483.648 ... 2.147.483.648 turns, PPU: -8.388.608 ... 8.388.608 turns Transfer Function Number of turns = (Data * Resolution)1.5 Configuration Data - Parameter Mode PGN 61184 + Source AddressThe reading and writing of parameters and the triggering of defined actions is done by Configuration PGN 61184. The PGN includes the sensor source address in the last byte for a peer-to-peer communication.Each configuration operation is answered with a ACK response.To write parameters, the 8 data bytes must contain the complete configuration (Byte 0 to Byte 7).2. Index 0: Trigger flagsTo trigger a defined action, the 8 data bytes have to contain the following trigger flags in index 1 byte 1:Important Note:∙Only one trigger flag can be set in each operation! If more than one trigger flag is set, there is no action executed. ∙If the trigger flag “Read Configuration PGN” is set, it is answered by the PGN Response “Configuration”1.6 Response PGN 65452Each configuration operation is answered with a ACK response or with the requested data (actual used configuration) by Response PGN 65452 (8 bytes).1.7 Request CommandsIn the sensor, requests are implemented for Name Identification, Process Data Message, Software Identification (firmware version) and Component Identification (serial number).SA: Sensor Source Address MA: Master Source Address1.7.1 Name Identification PGN 60928 0x00EE001.7.2 Process Data Message PGN 65450 0x00FFAA1.7.3 Software Identification PGN 65242 0x00FEDASensor process data configuration in byte 3 (see chapter 1.4.1): 0x00: PVU (1x position, 1x speed, 1x counter)0x01: PPVV (2x position, 2x speed)0x02: PPU (2x position, 1x counter)Product code:0x0C44: RFC-4800 series,0x0C57: RSA-3200 series0x0C21: RFE-3200 series1.7.4 Component Identification PGN 65259 0xFEEB001.8 Diagnosis1.8.1 Process Data in Error CasePosition value: HEX 0x7FF0Velocity value: 0Revolution counter: last value1.8.2 Sensor StatusA flag is set if an error or warning has occurred since the last reboot or flag reset.Caution: please be aware that the error flags are once set, they are not being reset automatically ! ∙Single output (see 1.4.1: PVU): the sensor status is flagged in last 4 bits of Byte 3.∙Redundant output (see 1.4.1: PPVV, PPU): the sensor status is flagged in 8 bits of Byte 4.1.9 Network TerminationOptionally, models with internal 120 Ω network termination resistor inside the sensor are available.1.10 AbbreviationsACL Address ClaimingCAN Controller Area NetworkCh ChannelMA Master AddressP PositionPD Process DataPDU Process Data UnitPG Parameter GroupPGN Parameter Group Numberrw Read Writero Read onlySLOT S caling, L imit, O ffset and T ransfer FunctionSA Source addressV Velocity1.11 Document Changes。
SAEJ1939标准整理

SAE J1939协议整理目录1.背景介绍 (3)2.SAE J1939标准明细 (3)3.与OSI模型关系 (3)4.SAE J1939标准分层 (4)4.1.物理层 (4)4.2.数据链路层 (6)4.3.网络层 (12)4.4.应用层 (13)4.5.故障诊断 (16)4.6.网络管理 (23)4.7.SAE J1939应用实例 (28)1.背景介绍of Automotive Engineers)制SAE J1939协议是由美国汽车工程师协会(SAE:Society定的主要针对商用车的CAN总线通信协议。
1)基于CAN2.0B协议制定(CAN2.0B是德国Bosch制定的通信协议,采用扩展帧)2)主要应用对象为客车、载重货车、船舶农业机械等非路面设备3)J1939的通信速率可达250Kpbs2.SAE J1939标准明细标准号标准名称修改日期SAE J1939车辆网络串行通信的控制总标准Revised2007-10-9SAE J1939/01卡车及客车等路面控制及信息网络Issued2000-09-1SAE J1939/02农业设备等非路面控制及信息网络Issued2006-08-23SAE J1939/05发动机故障诊断方面的应用Issued2008-2-21SAE J1939/11物理层,250K比特/秒,屏蔽双绞线Revised2006-9-18SAE J1939/13物理层,非车载诊断连接器Revised2004-3-11SAE J1939/15物理层,250K比特/秒,非屏蔽双绞线Revised2008-8-21SAE J1939/21数据链路层Revised2006-12-22SAE J1939/31网络层Revised2004-4-2SAE J1939/71车辆应用层Revised2008-1-28SAE J1939/73诊断应用层Revised2006-9-8SAE J1939/74应用层信息配置Revised2006-11-21SAE J1939/75应用层设置及工业化Revised2007-06-21SAE J1939/81网络管理层Revised2003-5-8SAE J1939/82相容性-卡车和客车Issued2008-8-113.与OSI模型关系System Interconnection)。
SAEJ1939
SAEJ1939协议更大程度地发挥了CAN优异的性能。
(二)SAEJ1939报文帧格式
J1939的信息是以PDU(Protocol Data Unit协议数据单元)的形式进行传输的,PDU的封装在应用层中完成。PDU提供了组织信息的框架,这一点对于每一个要发送的CAN数据帧来说是至关重要的。
车速、发动机转速、冷却水温度、燃油油量采用步进电机(VID29-02)驱动指针指示,里程信息采用里程表专用段式LCD模块LCM1010显示,各开关和报警信号则采用LED指示灯。
二、CAN总线及SAEJ1939协议分析
(一)CAN总线及SAEJ1939协议介绍
CAN(Controller Area Network)总线是德国Bosch公司在80年代初为解决数据可靠交换而开发的一种串行数据通信总线,它强调了实时性,又具有极高的可靠性和独特的设计,在现代汽车中已经成为必备装置。为进一步减少车身线束,方便故障诊断,满足主要电控单元和系统间大量数据信息实时交换的需要,使汽车各方面性能趋于最佳状态,基于CAN总线的C类网络被应用于车内数据通讯。CAN总线有效地将发动机电控系统、驱动防滑系统、自动巡航系统等连接成为一个综合控制系统,使整车性能得以大幅提高。
对于现代汽车而言,汽车仪表是汽车信息的中心,集中、直观、迅速地反映了汽车在行驶过程中的各种动态指标,如行驶速度、里程、电系状况、制动、压力、发动机转速、冷却液温度、油量、及各种危险报警。
汽车仪表已成为体现汽车高精尖技术的主要部分。
本文所述的总线式汽车仪表一方面具有传统仪表的数据采集功能,另一方面利用CAN总线技术,使该仪表成为车身网络的一部分,集中处理来自其他电控单元的数据,且其通讯符合SAEJ1939协议,可以与汽车上其他按照此协议工作的电控单元进行通讯。
SAE J1939使用说明3
2.1.1.1.1PTO调速器模式如果PTO调速器在运行,那么这种模式会有效。
2.1.1.1.2公路速度调速模式这种模式表示公路速度调速正在运行,并且在限制速度。
2.1.1.1.3ASR控制模式这种模式表示ASR命令有效(速度,转矩或速度/转矩限制控制)。
2.1.1.1.4传动系统控制模式这种模式表示传动命令有效(速度,转矩或速度/转矩限制控制)。
2.1.1.1.5ABS控制模式这种模式表示ABS系统在控制转矩输出。
2.1.1.1.6转矩限制模式如果所要求或命令的发动机转矩输出受到内部因素的限制,例如满负载,尾气排放控制,发动机保护和/或其他因素,这种模式会有效。
例如,如果发动机的温度过高或传感器失灵(速度,时间或升压调节),需要有限制来减少转矩,以保护发动机。
2.1.1.1.7高速调速器模式如果在正常操作下,发动机由高速调速器控制,那么这种模式有效。
2.1.1.1.8刹车系统(电子)模式这种模式表示刹车踏板在控制转矩输出。
需要注意,当刹车踏板在压下(被碰到)时,减速器也被开启了。
需要注意的是,如果对减速器有输出要求,但运行环境不允许刹车,这种情况会在广播时通过使减速器转矩百分比=0来反映。
如果遥控加速器在控制发动机的转速,那么这种模式有效。
2.1.1.1.10其他模式某类设备的转矩控制方式,但不同于5.2.2.1.1节到5.2.2.1.11节中所定义的。
2.1.1.2减速器类型(4位)车辆的减速器是为了让驾驶者更好地控制汽车的一种车轮制动辅助设备。
车辆中使用的刹车并不是为连续减速运行而设计的。
如果刹车的时间延长,刹车闸会由于摩擦发热过大,引起刹车效果减弱,甚至导致整个刹车系统失灵。
车辆的减速器就是为了在减速运行过程中的连续刹车操作而设计的,它也用于制动车辆,以适应速度限制和交通状况。
见表8。
这个参数表示了减速器的一些动力特性。
它在减速器状态设置消息(见5.3.15)中使用。
这个参数的数据类型是测量值。
SAE-J1939学习笔记(转)
转自h t t p://b l o g.c s d n.n e t/H u g o h u t/a r t i c l e/c a t e g o r y/2223943 SAE J1939学习笔记(一)1.总线布局2.差分信号线J1939 通讯传输的是一系列的“1”或“0”。
1 代表在J1939(+)与J1939(-)之间是高电压差。
0 代表在J1939(+)与J1939(-)之间是低电压差250K波特率时,在J1939高、低导线间的电压从0到1每秒变化250K次是可能的。
用一个高频示波器可以看到此电压变化。
3.ISO标准对应–Layer1– J1939/11: 物理层,物理介质,总线的设计, 长度,节点,等等.–Layer2– J1939/21: 数据层,定义分类PGN信息/传输协议.–Layer3– J1939/31: 网络层,定义不同网络互连之间的转换技术。
–Layer7– J1939/71: 应用层,信息分享、解析。
J1939/73: 应用层,故障信息。
4.术语SPN–特定参数–特定参数对应的号码,例如:SPN 190 = 发动机转速SPN 513 = % 扭矩PGN –参数组号码–总线上的信息被以“组”的形式广播,例如:PGN 61444 =发动机控制器#1 (EEC1)PGN 61444 = SPN 190, SPN 513,等等.发动机转速和扭矩百分比都属于PGN 61444参数组。
优先级–告诉ECM接收的信息的重要性:0 = 最重要6 = 最不重要例如:如果变速箱用优先级3请求发动机升速,而牵引控制器用优先级0请求发动机降速,最终发动机会选择降速。
源地址和目的地址–指示信息是从哪一个控制器发出,或发送到哪一个控制器。
00h–发动机控制器--主机01h–发动机控制器--辅机03h–变速箱5.CAN标准帧和扩展帧标准帧只有11位的标识符(ID)扩展帧有11+18=29位标识符(ID)以后均以扩展帧作介绍。
第五章 SAE J1939

备注
地址即源地址,唯一标识网络上的一个设备 地址功能 • 保证报文ID的唯一 • 确定报文的来源 两个特殊的地址 • 254——空地址
– 仅用于源地址域(SA),仅用于网络管理
• 255——全局地址
– 仅用于目标地址(DA)
报文格式
D
P RP
PF
3 11
8
J1939 PDU
PS
SA
8
8
... J1939简介
SAE J1939是一种支持闭环控制的在 多个ECU间高速通信的网络协议;主 要应用于货车和客车,及农、林业 运输机械上;以CAN2.0B为网络核心, 是其应用层的具体实现。
备注:CAN2.0B和1939的关系, 1939是CAN2.0B的具体应用。 乘用 车不用,各自有标准
CRC 界定
符
应答 间歇
应答 界定 符
7位帧结束
报文格式
PDU
J1939通过PDU定义了一个框架,用来组织数 据帧中J1939协议相关的信息
PDU由数据帧中的ID 和数据场组成
Arbitration Field
Control Field
Data Field:0-64
S O F
11 bit IDENTIFIER
PF
PS
SA
数据场
PDU 3 1 1
8
8
8
0~64
PF-PDU格式
用来确定PDU的2种格式
8位
0-239(00-EF)表示PDU1
240-255(F0-FF)表示PDU2
PGN的一部分
PDU1格式报文——向特定或全局地址发送
PDU2格式报文——向全局地址发送
报文格式
J1939数字发动机说明书v2.3

J1939数字发动机说明书手册版本: v2.3修订日期:2008年10月北京英贝多嵌入式网络有限公司J1939数字发动机说明书2联系方式:北京英贝多嵌入式网络技术有限公司 地址:北京海淀区知春路27 号,北京集成电路设计园10 层 邮编:100083电话:(010)82357579,82357580 传真:(010)82357574电子邮件:embedor@版权所有北京英贝多嵌入式网络技术有限公司BEIJING EMBEDOR EMBEDDED INTERNET TECH. CO.LTD 修订纪录V1.0 2007 年8 月1日 V1.1 2008 年9 月30日 V2.0 2008 年10月24日 V2.1 2008年10月27日 V2.2 2008年10月28日目录一、介绍 (4)二、J1939数字发动机说明 (5)1、功能介绍: (5)2、使用说明 (6)2.1 正面功能键说明: (6)2.2 液晶屏功能键说明 (7)3、接口定义: (9)4、接口使用说明 (10)4.1 Sensor 接口连接线定义(特别定制) (10)4.2 CANopen接口连接线定义(特别定制) (10)4.2 J1939接口连接线定义 (11)4.3 3~36V DC接口连接线定义 (12)三、定制产品 (12)四、随机附件: (13)设备附件 (13)附录 A: 触摸式J1939数字发动机故障模拟器简介 (14)设备规格 (14)设备功能简介 (14)3J1939数字发动机说明书4J1939数字发动机说明书一、介绍J1939数字发动机是英贝多公司通过国际合作开发的仿真测试系统,用于基于J1939汽车网络平台上的相关汽车电子产品的匹配试验和生产测试。
对J1939总线式汽车仪表、电子油门、自动变速箱的生产和检测是必不可少的设备。
多次用于国内企业产品标准测试。
对进入中国的超过30种车型进行过现场标定。
可联接成为J1939计算平台模拟整车的各部分,如发动机、变速箱、底盘、电子油门、仪表等的运行状况,通过试车运行和电子模拟方法建立仿真数据流模型来产生车辆运行过程中在CAN 总线上传输的各类型数据。
SAEJ1939标准整理
SAE J1939协议整理目录1.背景介绍 (3)2.SAE J1939标准明细 (3)3.与OSI模型关系 (3)4.SAE J1939标准分层 (4)4.1.物理层 (4)4.2.数据链路层 (6)4.3.网络层 (12)4.4.应用层 (13)4.5.故障诊断 (16)4.6.网络管理 (23)4.7.SAE J1939应用实例 (28)1.背景介绍SAE J1939协议是由美国汽车工程师协会(SAE:Society of Automotive Engineers)制定的主要针对商用车的CAN总线通信协议。
1)基于CAN2.0B协议制定(CAN2.0B是德国Bosch制定的通信协议,采用扩展帧)2)主要应用对象为客车、载重货车、船舶农业机械等非路面设备3)J1939的通信速率可达250Kpbs2.SAE J1939标准明细3.与OSI模型关系OSI模型,即开放式通信系统互联参考模型(Open System Interconnection)。
是国际标准化组织提出的网络互联模型,分为7层。
作用是提供一个标准规范,对应各层功能来制定协议。
4.SAE J1939标准分层4.1.物理层1)定义和相关说明:物理层定义电气接口和物理介质,实现通信网络中电控单元之间的电气连接。
机械特性,是指接口所使用连接器的形状和尺寸、引线数目和排列、固定和锁定装置等等;电气特性,是指接口电缆的各条线上出现的电压范围;功能特性,是指某条线上出现的某一电平的电压表示何种意义。
物理层的实现是由半导体厂家以及其他元器件生产厂家提供器件来实现的。
2)SAE J1939物理层要求项目规格物理介质特征阻抗为120Ω的屏蔽双绞线终端电阻120Ω,最远端的两个ECU各匹配一个最大传输线距离40M(1000Kbps)同网络节点数量考虑到总线电气负担,同一网络最多允许的ECU为30个信号传输方式差动电压传输方式(Vdiff=VcanH–VcanL)总线电平显性(逻辑0,CANH3.5V,CANL1.5V)隐性(逻辑1,CANH2.5V,CANL2.5V)3)几个概念Rin:内部电阻Rsh:内部差动电阻Cin:内部电容Csh:内部差动电容位时间tB:一比特的持续时间,本标准对应于250kbit/s位时间是4μs。
SAEJ1939标准整理

SAEJ1939标准整理SAE J1939标准整理SAE J1939是一个广泛应用于商用车辆、农业和建筑机械等领域的控制和通信协议标准。
该标准由美国汽车工程师协会(SAE)制定,旨在实现电子控制单元(ECU)之间的可靠通信和数据交换。
1. 引言SAE J1939标准是为了满足商用车辆和相关领域的要求而制定的。
它允许不同厂家的设备之间进行互操作,从而实现更好的系统集成和协作。
2. 概述SAE J1939标准基于控制区域网络(CAN)总线通信协议,具备高可靠性和高性能的特点。
它定义了ECU之间的消息格式和通信过程,确保数据的准确传输和解析。
3. 网络拓扑SAE J1939网络通常采用总线结构,需要至少两个节点之间的连接。
每个节点都有唯一的地址,以便进行消息的定位和路由。
4. 数据链路层SAE J1939标准采用帧的形式进行数据通信。
它定义了消息的ID、优先级和数据长度等重要的数据链路层细节。
5. 物理层SAE J1939标准支持多种物理层实现,包括双绞线、光纤和无线等。
这使得该标准能够适应不同应用环境和通信需求。
6. 数据格式和识别SAE J1939定义了一套统一的数据格式和识别机制。
它使用参数组(PGN)和参数组数量(PGN)来标识和传输数据。
7. 故障诊断SAE J1939标准包含了一套完善的故障诊断机制,能够帮助用户及时发现和排除系统中的问题。
它支持自诊断和远程诊断的功能。
8. 应用领域SAE J1939广泛应用于商用车辆、农业和建筑机械等领域。
通过使用该标准,不同设备之间可以实现数据的交互和协调,提高整体系统的性能和效率。
9. 未来发展随着技术的不断进步,SAE J1939标准仍在不断发展和演进。
新的功能和扩展模块的引入将进一步促进其应用范围的扩大和改进。
10. 结论SAE J1939标准是商用车辆和相关领域的重要通信协议。
它通过定义消息格式、优先级和数据传输机制,实现了设备之间的可靠通信和数据交换。
深海电子J1939引擎管理系统说明书
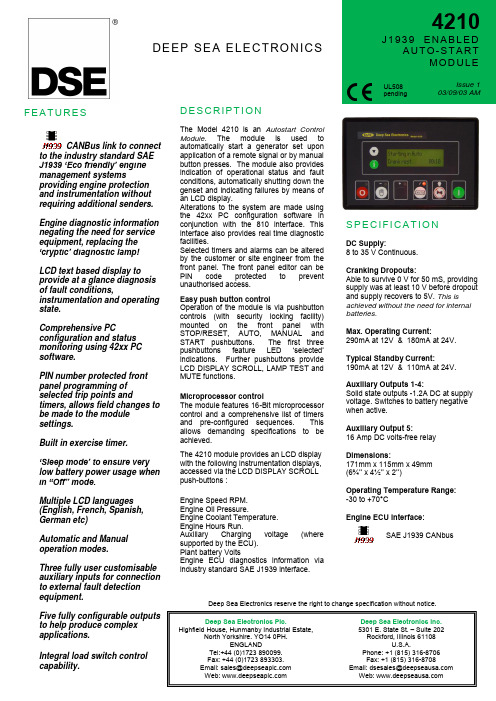
DEEP SEA ELECTRONI CS4210 J1939E N A B L E DA U T O-S T A R TM O D U L EF E A T U R E SCANBus link to connect to the industry standard SAEJ1939 …Eco friendly‟ engi nemanagement systemsproviding engine protectionand instrumentation withoutrequiring additional senders.Engine diagnostic informationnegating the need for serviceequipment, replacing the…cryptic‟ diagnostic lamp!LCD text based display toprovide at a glance diagnosisof fault conditions,instrumentation and operatingstate.Comprehensive PCconfiguration and statusmonitoring using 42xx PCsoftware.PIN number protected frontpanel programming ofselected trip points andtimers, allows field changes tobe made to the modulesettings.Built in exercise timer.…Sleep mode‟ to ensure verylow battery power usage whenin “Off” mode.Multiple LCD languages(English, French, Spanish,German etc)Automatic and Manualoperation modes.Three fully user customisableauxiliary inputs for connectionto external fault detectionequipment.Five fully configurable outputsto help produce complexapplications.Integral load switch controlcapability. D E S C R I P T I O NThe Model 4210 is an Autostart ControlModule. The module is used toautomatically start a generator set uponapplication of a remote signal or by manualbutton presses. The module also providesindication of operational status and faultconditions, automatically shutting down thegenset and indicating failures by means ofan LCD display.Alterations to the system are made usingthe 42xx PC configuration software inconjunction with the 810 interface. Thisinterface also provides real time diagnosticfacilities.Selected timers and alarms can be alteredby the customer or site engineer from thefront panel. The front panel editor can bePIN code protected to preventunauthorised access.Easy push button controlOperation of the module is via pushbuttoncontrols (with security locking facility)mounted on the front panel withSTOP/RESET, AUTO, MANUAL andSTART pushbuttons. The first threepushbuttons feature LED ‘selected’indications. Further pushbuttons provideLCD DISPLAY SCROLL, LAMP TEST andMUTE functions.Microprocessor controlThe module features 16-Bit microprocessorcontrol and a comprehensive list of timersand pre-configured sequences. Thisallows demanding specifications to beachieved.The 4210 module provides an LCD displaywith the following instrumentation displays,accessed via the LCD DISPLAY SCROLLpush-buttons :Engine Speed RPM.Engine Oil Pressure.Engine Coolant Temperature.Engine Hours Run.Auxiliary Charging voltage (wheresupported by the ECU).Plant battery VoltsEngine ECU diagnostics information viaindustry standard SAE J1939 interface.Issue 103/09/03 AMS P E C I F I C A T I O NDC Supply:8 to 35 V Continuous.Cranking Dropouts:Able to survive 0 V for 50 mS, providingsupply was at least 10 V before dropoutand supply recovers to 5V.This isachieved without the need for internalbatteries.Max. Operating Current:290mA at 12V & 180mA at 24V.Typical Standby Current:190mA at 12V & 110mA at 24V.Auxiliary Outputs 1-4:Solid state outputs -1.2A DC at supplyvoltage. Switches to battery negativewhen active.Auxiliary Output 5:16 Amp DC volts-free relayDimensions:171mm x 115mm x 49mm(6¾’’ x 4½’’ x 2’’)Operating Temperature Range:-30 to +70°CEngine ECU interface:SAE J1939 CANbusDeep Sea Electronics Plc.Highfield House, Hunmanby Industrial Estate,North Yorkshire. YO14 0PH.ENGLANDTel:+44 (0)1723 890099.Fax: +44 (0)1723 893303.Email:********************Web: Deep Sea Electronics inc.5301 E. State St. – Suite 202Rockford, Illinois 61108U.S.A.Phone: +1 (815) 316-8706Fax: +1 (815) 316-8708Email:***********************Web: Deep Sea Electronics reserve the right to change specification without notice.UL508pendingD I ME N S I O N ST Y P I C A L C O N N E C T I O N S。
SAEJ1939: 串行控制通信汽车网络的推荐操作规程

路面车辆推荐操作规程(被采纳为美国国家标准)SAEJ1939:串行控制通信汽车网络的推荐操作规程前言本系列SAE推荐操作规程是由卡车及客车电子电气委员会所属的卡车及客车控制及通信小组委员会制定的。
该小组委员会的目标是针对电控单元的需求、设计和使用,提交信息报告、制定推荐操作规程。
这些电控单元在汽车部件之间传递着电子信号和控制信息。
本规程的使用不限于卡车和客车应用,其对于其他的应用也可以提供直接的支持,正如已在建筑及农业设备和固定式的动力系统。
本推荐操作规程的最终目标是形成工业标准,因此可能为适应实际应用和技术进步作出经常性的调整。
本推荐操作规程中描述的控制局域网(Controller Area Network,CAN)协议是博世公司(Robert Bosch GmbH,Bosch)的知识产权。
博世将给予所有要生产或设计控制局域网电控单元的企业一个证书。
只有包含了控制局域网协议的集成芯片或软件的制造商需要办理版权证书的手续,对控制局域网协议的使用并不需要申请证书。
有关证书授权的信息和典型应用可以在下述地址获得:GmbHRobertBoschAttn: Licensing Department106050BoxPOStuttgartD-70049Federal Republic of Germany本推荐操作规程的制定是作为在J1708、J1587和J1922推荐操作规程中所完成工作的延续。
但J1939系列的推荐操作规程相比上述早期文件提供了更高的性能。
目录前言 (1)1 目标 (3)1.1 开放程度 (3)1.2 执行验证 (3)2 参考 (3)2.1 出版物 (3)2.2 定义及缩写 (4)2.2.1 定义 (4)2.2.2 缩写 (6)2.3 开放系统互连模型参考: (7)2.4 文档结构指南 (8)3 技术规定 (9)3.1 J1939教程 (9)3.1.1 简介 (10)3.1.2 消息格式和使用方法 (10)3.1.3 地址和名称(J1939/81及附录B) (11)3.1.4 通信方式 (13)3.1.5 传送消息(使用J1939/21和J1939/7X) (13)3.1.6 接收消息(使用J1939/21和J1939/7X) (13)3.1.7 电控单元设计(使用J1939/11、J1939/21和J1939/7X) (14)3.1.8 网络拓扑——J1939/01使用物理层J1939/11和网络层J1939/31 (14)3.2 预分配值 (14)3.2.1 参数群编号 (15)3.2.2 数据域分组 (15)3.2.3 名称系统和功能 (16)3.2.4 产业类群.........................................................................错误!未定义书签。
SAEJ1939协议解析
SAEJ1939协议解析[SAE J1939]
使
⽤
指
南
硬件版本:V2.00
软件版本:V1.41
固件版本:V2.10
⼴东中⼭四海电⼦科技
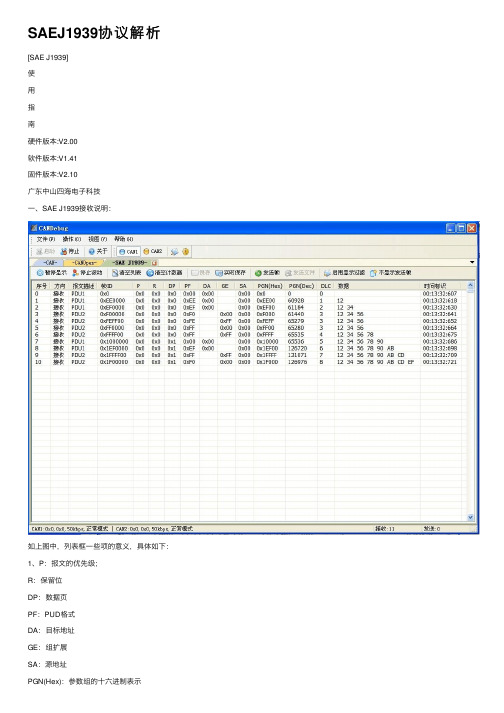
⼀、SAE J1939接收说明:
如上图中,列表框⼀些项的意义,具体如下:1、P:报⽂的优先级;
R:保留位
DP:数据页
PF:PUD格式
DA:⽬标地址
GE:组扩展
SA:源地址
PGN(Hex):参数组的⼗六进制表⽰
PGN(Dec):参数组的⼗进制表⽰
PDU1:当PF<240 时,为PDU1格式
PDU2:当PF=240~255时,为PDU2格式
其中GE只对PDU2有效,DA只对PDU1有效
⼆、SAE J1939发送说明:
1、帧ID:
填⼊⼗六进制的帧ID,软件会⾃动为它解析出P、R、DP、PF、PS、SA、PGN各项的数值2、DLC:
数据长度:范围是0~8
3、数据:从左到右分别是DA TA0、DATA1、DATA2、DA TA3、DATA
4、DATA
5、DATA
6、DATA7
4、超时ms:
表⽰发送SAE J1939帧时的超时时间。
5、帧发送间隔ms:
只在<按列表发送>时有效
6、循环次数
只在<按列表发送>时有效,表⽰列表框中数据发送的次数
7、<保存列表数据>:将列表中的数据保存下来,以便下次使⽤
8、<载⼊列表数据>:将配置⽂件读⼊,避免重复的⼯作
9、<更新>:选择列表框中的数据,修改后,再点击<更新>就可以更改当前列表框选择中的数据。
第五章 SAE J1939

报文格式
参数组与PGN
PGN与PDU的对应关系
J1939 PDU . . . P 3 D RP 11 PF 8 PS 8 SA 8 数据场 0~64
0
R
DP 1
PF 字节2 PGN
PDU1:0x00 PDU2:GE
PS=DA PS=GE
2 位8-3 字节1
字节3
查阅应用层对PGN的描述——获得PDU的内容—— 将PDU相应内容填充至CAN数据帧中
PDU
数据场
数据场包含了参数组中的数据内容 通常控制类参数组数据长度=8,其中未定义的字 节以0xFF填充,以备将来分配 如果参数组长度超过8,要使用传输协议
备注:传输协议参考1939-21
报文格式
参数组与PGN
参数组
应用层中定义的与某个ECU相关的具有相同控制功 能的若干个参数的组合
PGN
用于唯一标识参数组的号码 24位数字,应用层定义 与PDU中的某些域场存在对应关系
报文格式
J1939 PDU . . . D RP 11
ห้องสมุดไป่ตู้
PDU
P 3
PF 8
PS 8
SA 8
数据场 0~64
PF-PDU格式
用来确定PDU的2种格式 8位 0-239(00-EF)表示PDU1 240-255(F0-FF)表示PDU2 PGN的一部分 PDU1格式报文——向特定或全局地址发送 PDU2格式报文——向全局地址发送
参数组名称,传输更新速率,数据长度,数据页, PDU格式,PDU细节,默认优先级,参数组号,数据 列表以及其他相关注释
SAE分配的参数组列表——《SAEJ1939》附录A 《Parameter Group Assignments》
SAEJ1939标准整理

SAEJ1939标准整理SAE J1939协议整理目录1.背景介绍 (3)2.SAE J1939标准明细 (3)3.与OSI模型关系 (3)4.SAE J1939标准分层 (4)4.1.物理层 (4)4.2.数据链路层 (6)4.3.网络层 (12)4.4.应用层 (13)4.5.故障诊断 (16)4.6.网络管理 (23)4.7.SAE J1939应用实例 (28)1.背景介绍SAE J1939协议是由美国汽车工程师协会(SAE:Society of Automotive Engineers)制定的主要针对商用车的CAN总线通信协议。
1)基于CAN2.0B协议制定(CAN2.0B是德国Bosch制定的通信协议,采用扩展帧)2)主要应用对象为客车、载重货车、船舶农业机械等非路面设备3)J1939的通信速率可达250Kpbs2.SAE J1939标准明细3.与OSI模型关系OSI模型,即开放式通信系统互联参考模型(Open System Interconnection)。
是国际标准化组织提出的网络互联模型,分为7层。
作用是提供一个标准规范,对应各层功能来制定协议。
4.SAE J1939标准分层4.1.物理层1)定义和相关说明:物理层定义电气接口和物理介质,实现通信网络中电控单元之间的电气连接。
机械特性,是指接口所使用连接器的形状和尺寸、引线数目和排列、固定和锁定装置等等;电气特性,是指接口电缆的各条线上出现的电压范围;功能特性,是指某条线上出现的某一电平的电压表示何种意义。
物理层的实现是由半导体厂家以及其他元器件生产厂家提供器件来实现的。
2)SAE J1939物理层要求项目规格物理介质特征阻抗为120Ω的屏蔽双绞线终端电阻120Ω,最远端的两个ECU各匹配一个最大传输线距离40M(1000Kbps)同网络节点数量考虑到总线电气负担,同一网络最多允许的ECU 为30个信号传输方式差动电压传输方式(Vdiff=VcanH–VcanL)总线电平显性(逻辑0,CANH3.5V,CANL1.5V)隐性(逻辑1,CANH2.5V,CANL2.5V)3)几个概念Rin:内部电阻Rsh:内部差动电阻Cin:内部电容Csh:内部差动电容位时间tB:一比特的持续时间,本标准对应于250kbit/s位时间是4μs。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1.1.1.1PTO调速器模式如果PTO调速器在运行,那么这种模式会有效。
2.1.1.1.2公路速度调速模式这种模式表示公路速度调速正在运行,并且在限制速度。
2.1.1.1.3ASR控制模式这种模式表示ASR命令有效(速度,转矩或速度/转矩限制控制)。
2.1.1.1.4传动系统控制模式这种模式表示传动命令有效(速度,转矩或速度/转矩限制控制)。
2.1.1.1.5ABS控制模式这种模式表示ABS系统在控制转矩输出。
2.1.1.1.6转矩限制模式如果所要求或命令的发动机转矩输出受到内部因素的限制,例如满负载,尾气排放控制,发动机保护和/或其他因素,这种模式会有效。
例如,如果发动机的温度过高或传感器失灵(速度,时间或升压调节),需要有限制来减少转矩,以保护发动机。
2.1.1.1.7高速调速器模式如果在正常操作下,发动机由高速调速器控制,那么这种模式有效。
2.1.1.1.8刹车系统(电子)模式这种模式表示刹车踏板在控制转矩输出。
需要注意,当刹车踏板在压下(被碰到)时,减速器也被开启了。
需要注意的是,如果对减速器有输出要求,但运行环境不允许刹车,这种情况会在广播时通过使减速器转矩百分比=0来反映。
如果遥控加速器在控制发动机的转速,那么这种模式有效。
2.1.1.1.10其他模式某类设备的转矩控制方式,但不同于5.2.2.1.1节到5.2.2.1.11节中所定义的。
2.1.1.2减速器类型(4位)车辆的减速器是为了让驾驶者更好地控制汽车的一种车轮制动辅助设备。
车辆中使用的刹车并不是为连续减速运行而设计的。
如果刹车的时间延长,刹车闸会由于摩擦发热过大,引起刹车效果减弱,甚至导致整个刹车系统失灵。
车辆的减速器就是为了在减速运行过程中的连续刹车操作而设计的,它也用于制动车辆,以适应速度限制和交通状况。
见表8。
这个参数表示了减速器的一些动力特性。
它在减速器状态设置消息(见5.3.15)中使用。
这个参数的数据类型是测量值。
可疑参数编号:901表8—减速器类型状态位减速器类型0000电子/磁铁式0001液压式0010冷却式摩擦0011减压式(发动机减速器)0100排气式0101-1101未定义1110其他1111不可用2.1.1.2.1电子/磁铁式减速器电子/磁铁式减速器是通过把电枢转子放在可变磁场中产生闭合电流而起作用的。
目前,电子式减速器的励磁线圈装在定子上。
转子装在驱动轴的两端,有助于散热。
把电压加在励磁线圈上形成电磁场,当转子通过磁场时会产生感应电流,这样使车辆减速。
磁铁式减速器是用永久磁铁来产生闭合电流。
制动转矩是靠定子励磁和定转子之间的气隙形成的。
液压式减速器是一种液压耦合设备。
在两个相对的叶轮之间,也就是定子和转子之间充满了液压油。
当与车辆驱动轴连接的转子旋转时,它会把油箱旋转的方向推进。
转子的机械能转换为液体的动能。
定子和转子间的液压耦合把液体动能转换为热能,这样转子被制动了。
这个制动效果被传送到驱动轴,使得车辆制动。
2.1.1.2.3冷却式摩擦刹车冷却式摩擦刹车用空气或冷却液来散发脚踏刹车闸摩擦表面的热量。
通过控制摩擦表面的温度,可以改善减速转矩,减少磨损。
2.1.1.2.4减压式发动机减速器减压式发动机减速器在发动机运行到压力循环的高位死点附近时,把排气阀打开,使输出功率的发动机转换成吸收功率的减速机构。
在压缩气团被释放以后,将不会有正功率输出。
因为汽车必须要提供能量使气缸的充气压缩,以及使活塞回复到底部位置,所以汽车就会减速了。
2.1.1.2.5排气式刹车排气式刹车限制了排气歧管的排气释放。
每次完成排气冲程时,都会在歧管内产生一个反冲力,这样在排气冲程中会对活塞产生制动效果。
发动机利用这种反冲力对车辆形成刹车效果。
2.1.1.2.6辅助减速器在车辆种,风扇、空调或者任何消耗功率的设备也可以通过加强它们对发动机或车辆的负载来实现减速功能。
2.1.1.3减速器定位(4位)这个参数定义了“转矩/速度曲线”的定义方式,也就是说这条曲线在减速器状态设置消息(见5.3.15)中是由发动机转速,输出轴转速或者还是其他参数决定。
这个参数的数据类型是测量值。
见表9。
可疑参数编号:902表9—减速器定位状态位减速器类型0000(初级)发动机减压式制动(发动机转速)0001(初级)发动机排气式制动(排气压力)0010(初级)传动系统输入(发动机转速)0011(二级)传动系统输出(输出轴转速)0100(二级)动力传动系统(输出轴转速)0101拖车(车辆速度)0110-1101未定义1110其他1111不可用2.1.1.4加速踏板低速空转开关这个开关信号表示加速踏板低速空转开关是否打开。
低速空转开关的定义在SAE J1843。
00-加速踏板不在低速空转位置01-加速踏板在低速空转位置类型:测量值可疑参数编号:558参考:5.3.62.1.1.5加速踏板换低档开关这个开关信号表示加速踏板换低档开关是否打开。
换低档开关的定义在SAE J1843。
00-被动式换低档01-主动式换低档类型:测量值可疑参数编号:559参考:5.3.62.1.1.6动力传动系统工作中这个参数表示,动力传动系统中被控制的传动部分正在充分运行,使转矩能通过传动系统传递出去。
只要正在进行齿轮传动,或者离合器工作(由传动控制器控制)打滑程度少于100%(离合器能够传输转矩),动力传动系统使用中这个参数会有效。
这个参数应该与参数“换档进行中”(5.2.2.14)联合使用。
当换档在进行中,接收者应该确定动力传动系统是在完全工作状态还是在非工作状态(例如,巡航控制系统)00-动力传动系统非工作中01-动力传动系统工作中类型:测量值可疑参数编号:560参考:5.3.52.1.1.7ASR发动机控制运行(状态)这个状态信号表示ASR发动机控制已经被命令打开。
正在运行表示ASR在尝试控制发动机。
这个状态信号与其他有较高优先级的发动机控制命令无关(例如,来自传动系统的命令)。
00-ASR发动机控制已安装但没有运行01-ASR发动机控制在运行类型:状态可疑参数编号:561参考:5.3.42.1.1.8ASR制动控制运行(状态)这个状态信号表示ASR制动控制在运行。
正在运行是指ASR在控制驱动轴上一个或多个车轮的制动压力。
00-ASR制动控制已安装但没有运行01-ASR制动控制在运行类型:状态可疑参数编号:562参考:5.3.42.1.1.9防抱死刹车系统(ABS)运行(状态)这个状态信号表示ABS系统正在运行。
当车轮制动压力已经开始由ABS系统调节时,该信号被设置为在运行(状态);当所有车轮都停下来的时候,该信号被复位为非运行状态。
如果驱动轮在高速滑动(例如,由于减速器引起的),这时该信号也会被设置为运行状态。
如果ABS系统没有完全运作起来(由于某个过失或者在越野的ABS运行过程中),该信号只能在工作系统中部分有效。
如果ABS被完全关闭,那么不管目前车轮是否在滑动,这个状态标志都会被设为非运行状态。
00-ABS已安装但没有运行01-ABS正在运行类型:状态可疑参数编号:563参考:5.3.42.1.1.10差速锁状态这个状态用于表示不同差速锁的工作状态。
差速锁的定位见图7中的定义。
00-差速锁非工作中01-差速锁工作中类型:状态可疑参数编号:564(中部)565(中前部)566(中后部)567(前轮轴1)568(前轮轴2)569(后轮轴1)570(后轮轴2)参考:5.3.9图7—差速锁位置2.1.1.11减速器启动-刹车辅助开关这个开关信号表示驾驶者是否希望打开减速器来辅助刹车。
减速器自己不会检查这个开关信号,这个开关信号有效也不会使减速器工作。
当这个信号为“有效”时,对减速器发出TSC1消息的设备可以命令减速器输出制动转矩。
例如,如果这个开关不是“有效”,那么巡航控制系统就不能要求减速器输出转矩。
这个开关信号可以防止发动机减速器在噪声敏感的区域内接收TSC1消息的工作请求。
见5.2.2.12。
00-减速器—刹车辅助关闭01-减速器—刹车辅助打开类型:测量值可疑参数编号:571参考:5.3.32.1.1.12减速器启动-换档辅助开关这个开关信号表示驾驶者是否希望打开减速器来辅助传动系统的换档。
减速器自己不会检查这个开关信号,这个开关信号有效也不会使减速器工作。
当这个信号为“有效”时,传动系统可以激活减速器(通过TSC1消息)来增加发动机的减速速度,以帮助换档控制。
这个开关信号可以防止发动机减速器在噪声敏感的区域内接收TSC1消息的工作请求。
见5.2.2.11。
00-减速器—换档辅助关闭01-减速器—换档辅助打开类型:测量值可疑参数编号:572参考:5.3.32.1.1.13转矩变换器锁定工作这个状态信号表示转矩变换器的锁定装置是否在工作。
00-转矩变换器锁定不工作01-转矩变换器锁定工作类型:状态可疑参数编号:573参考:5.3.52.1.1.14换档进行中这是指传动系统正处于从当前工作齿轮切换到所选定齿轮的换档过程中。
一般在传动系统控制车辆的整段时间内,这个状态都是有效的。
它包括任何的离合器控制传动,所有的发动机控制步骤,切换到传动齿轮空档,以及让指定齿轮工作(例如,直到它不再发送命令和/或限制给发动机)。
见5.2.2.6。
(见图8)图8—换档进行中00-换档没有在进行01-换档在进行中类型:测量值可疑参数编号:574参考:5.3.52.1.1.15ABS越野运行开关这个开关信号表示ABS越野运行开关的位置。
00-ABS越野运行开关关闭01-ABS越野运行开关打开类型:测量值可疑参数编号:574参考:5.3.42.1.1.16ASR越野运行开关这个开关信号表示ASR越野运行开关的位置。
00-ASR越野运行开关关闭01-ASR越野运行开关打开类型:测量值可疑参数编号:576参考:5.3.42.1.1.17ASR“上坡防退器”开关这个开关信号表示ASR“上坡防退器”开关的位置。
00-ASR“上坡防退器”开关关闭01-ASR“上坡防退器”开关打开类型:测量值可疑参数编号:577参考:5.3.42.1.1.18巡航控制系统状态(3位)这个参数用于表示巡航控制设备的当前状态或者操作模式。
见表10。
这是一个状态型参数。
(参考:5.3.31)可疑参数编号:527表10—巡航控制系统状态状态位巡航控制系统状态000关闭/禁止001保持010加速011减速/滑行100继续101设置110加速器代理111不可用2.1.1.18.1关闭/无效000用于表示巡航控制设备在关闭或待机状态。
需要注意,在这种模式下,巡航控制系统开关不必设为关闭。
2.1.1.18.2保持001用于表示巡航控制设备已经打开,并且目前在维持一个已获取的车辆运行速度。