A8伺服手册
美国AMC伺服驱动器25A8中文产品技术资料

零漂调节/测试。用来调节任何输入信号或者驱动器内部的零漂。也可以作为内
4
负向调整零漂
部信号源,用来实现测试的目的。
注意:电位器近似是线性的,一共 12 圈,头尾各 1 圈是无效的。
电位器调节方法(摘自 instnotes)
n Offet(l 零漂调节) 在调节零漂之前,参考输入(Reference Input)引脚必须接地或者输入的指令电压为零伏。先把测试/
*Approvals may be pending. See “Compliances & Agency Approvals” on page 1 of datasheet for currently held approvals.
上海同普电力技术有限公司 地址:上海市杨浦区赤峰路 65 号 1 号楼
功能结构图
25A8
模式选择表
SW1 SW2 SW3
电流模式
OFF OFF ON
电压模式
ON OFF OFF
IR 补偿模式
ON OFF OFF
测速发电机模式 OFF OFF OFF
大多数应用场合 SW2 都应该是 OFF。
绿色 LED 指示灯:工作正常 红色 LED 指示灯:故障状态 电流模式下的推荐设置:POT1 逆时针最大,POT3 顺时针最大 驱动器出厂时为电流模式且限制电流最大 其他拨码开关的功能请参看拨码开关介绍部分 *由用户选择安装的通孔器件
RoHS (Reduction of Hazardous Substances) is intended to prevent hazardous substances such as lead from beingmanufactured in electrical and electronic equipment.
伺服驱动器用户手册
2.2.2、通风间隔
2.2.3、安装方法 1)、安装方向:伺服驱动器的正常安装方向是垂直直立方向。 2)、安装固定:上紧伺服驱动器上的四颗 M5 固定螺钉。 3)、通风散热:采用自然冷却方式,在电气控制柜内必须安装散热风机。
z 拆装带轮时,不可敲击电机或电机轴,防止损坏编码器。应采用螺旋式压 拔工具拆装
z 驱动器端子 U、V、W 必须与电机 U、V、W 一一对应 z 用户在使用本产品时务必在设计与装配时考虑安全防护措施,以防止
因错误的操作引起意外事故 z 驱动器和电机必须良好接地 z 在拆卸本驱动器前,必须断电 5 分钟以上
3.1、标准接线
本交流伺服驱动器的接线与使用的电机和控制方式等有关。
10
3.1.1、与武汉华大、常州常华、常州新月 4 对极电机控制接线图 3-1,对南 京苏强 110SQMA4IE 系列 4 对极电机只需将 UVW 接电机的 423 脚 对应参数 P34=2360、P35=4
20A
30A
50A
75A
100A 150A
≤1.2KW
25A ≤3.7KW
≤2.3KW ≤3.7KW ≤5.5KW ≤7.5KW
AC380V -15%~+10%
50A
75A
≤7.5KW ≤11KW
≤11KW
工作:45℃
存贮:-40℃~55℃
40%~80%无结露 86-106kpa ①位置控制 ②JOG 控制 ③速度控制 ④转矩控制 ⑤位置和速度控制 ⑥内部脉冲控制 ⑦电动刀架控制 ⑧位置和转矩控制 ①脉冲+方向 ②CW+CCW 脉冲 ③两相 AB 正交脉冲 0.01% ≤200Hz ≥500kHz 1:5000 内置 1/30000~30000/1 ≥300% 2500p/r 电机转速、电机电流、电机转矩、电机位置、位置偏差、指 令脉冲数、脉冲频率、直线速度、输入输出诊断 超速、过流、过压、欠压、过载、超差、编码器故障、温度 过高、内部芯片故障、模块故障
DA98A系列全数字式交流伺服驱动装置说明书

第七章 通电运行 ........................................................................................ 37 7.1 电源连接 ..................................................................................... 37 7.2 试运行 ......................................................................................... 39 7.3 调整............................................................................................. 40
A8说明书[1]
![A8说明书[1]](https://img.taocdn.com/s3/m/a1682cd026fff705cc170a4e.png)
华星 A8 RTK 测量系统使用说明书
作业方案简易操作 ..................................................................................................... 42
静态采集及数据传输............................................................................. 46
基本操作 ................................................................................................. 14
引言 ............................................................................................................................. 15 按键功能 ..................................................................................................................... 16 指示灯说明 ................................................................................................................. 17 启动和停止接收机 ..................................................................................................... 20 静态数据存储 ............................................................................................................. 20 RTK 数据存储 ............................................................................................................. 21 复位接收机 ................................................................................................................. 21 恢复出厂设置 ............................................................................................................. 21 格式化接收机 ............................................................................................................. 21 供电系统 ..................................................................................................................... 23 通信模块 ..................................................................................................................... 27 SIM 卡/USIM 卡 .......................................................................................................... 30 固件 ............................................................................................................................. 33
台达 ASDA-A系列 伺服驱动器 应用技术手册

序言感谢您使用本产品,本使用操作手册提供ASDA-A系列伺服驱动器及ASMT系列伺服电机的相关信息。
内容包括:z伺服驱动器和伺服电机的安装与检查z伺服驱动器的组成说明z试转操作的步骤z伺服驱动器的控制功能介绍及调整方法z所有参数说明z通信协议说明z检测与保养z异常排除z应用例解说明本使用操作手册适合下列使用者参考z伺服系统设计者z安装或配线人员z试转调机人员z维护或检查人员在使用之前,请您仔细详读本手册以确保使用上的正确。
此外,请将它妥善放置在安全的地点以便随时查阅。
在您尚未读完本手册时,请务必遵守下列事项:z安装的环境必须没有水气,腐蚀性气体及可燃性气体z接线时禁止将三相电源接至电机U、V、W的连接器,一旦接错时将损坏伺服电机z必须确保接地良好z在通电时,请勿拆解驱动器、电机或更改配线z在通电运作前,请确定紧急停机装置是否能随时启动z在通电运作时,请勿接触散热片,以免烫伤如果您在使用上仍有问题,请咨询经销商或者本公司客服中心序言|ASDA-A系列安全注意事项ASDA-A系列为一开放型(open type)伺服驱动器,操作时须安装于屏蔽式的控制箱内。
本驱动器利用精密的反馈控制及结合高速运算能力的数字信号处理器(Digital Signal Processor, DSP),控制IGBT产生精确的电流输出,用来驱动三相永磁式同步交流伺服电机(PMSM)达到准确定位。
ASDA-A系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱动器、线材及电机都必须安装于符合UL环境等级1的安装环境最低要求规格)。
在接受检验、安装、配线、操作、维护及检查时,应随时注意以下安全注意事项。
标志「危险」、「警告」及「禁止」代表的涵义:意指可能潜藏危险,若未遵守可能会对人员造成严重或致命的伤害。
意指可能潜藏危险,若未遵守可能会对人员造成中度的伤害,或导致产品严重损坏,或甚至故障。
意指绝对禁止的行动,若未遵守可能会导致产品损坏,或甚至故障而无法使用。
新代控制器伺服连接与设定手册V

SYNTEC伺服连接与设定手册by :苏州新代技术中心date : 2011/11/25ver :2.4版本更新记录项次更改内容纪录更改日期作者更改后版本01 初版定稿2010.01 袁鹏V1.002 修改Estun伺服配图ALARM引脚标定的错误2010.04.28 徐兵V1.103 增加杭州英迈克伺服,国际伺服2010.06.15 许明V1.204 增加东元伺服,三菱MR-E伺服2010.08.04 许明V1.32010.09.12 许明V1.405 修改HSV-160伺服接线图,增加华中HSV-18D伺服06 修改台达B2伺服连接线图及参数2010.10.25 许明V1.507 删除广数伺服2010.11.01 许明V1.608 增加ESTUN-EDB伺服2010.11.09 许明V1.72010.12.02 许明V1.809 修改迈信EP100 CLR引脚,增加EP1,EP2伺服连接图及参数10 修改东元伺服参数设定2010.12.23 许明V1.911 修改松下A4参数修改2011.01.26 许明V2.012 增加松下A5 2011.02.28 许明V2.113 参数仅供参考2011.07.11 许明V2.214 重新排版,伺服顺序重排2011.10.13 许明V2.315 接线图重新校正2011.11.24 许明V2.4*如有修改请恕不另行通知目录一、台达系列连线及参数设置 (4)1 台达A系列: (4)2 台达B系列: (6)3 台达AB系列: (8)4 台达A2系列: (10)5 台达B2系列: (12)二、安川连线及参数设置 (13)1 安川二型系列: (14)2 安川五型系列: (16)三、三菱系列伺服接线与参数设定 (19)1 三菱J2S-A: (19)2 三菱J3-A: (22)3三菱MR-E: (25)四、松下系列连线及参数设置 (30)1 松下A: (30)2 松下A4: (32)3 松下A5: (34)五、华中伺服连线及参数设置 (36)1 华中HSV-160: (36)2 华中HSV-18D: (38)六、ESTUN伺服连线及参数设置 (40)1 ESTUN-PRONET: (40)2ESTUN-EDB: (42)七、SANYO伺服连线及参数设置 (44)1 SANYO-R: (44)2 SANYO-PY2: (46)八、杭州英迈克伺服连线及参数设置 (50)1 杭州英迈克: (50)九、东元伺服连线及参数设置 (52)1 东元伺服(TSDA): (52)2 东元伺服(TSDE): (55)十、迈信连线及参数设置 (57)1 迈信EP1: (57)2 迈信EP2: (59)3 迈信EP100: (62)一、台达系列连线及参数设置1 台达A系列:参数仅供参考伺服驱动器参数参数号设置内容备注P1-00 0 0:AB脉冲 1:CW/CCW 2:脉冲+符号P1-01 100 0:位置模式,扭矩输出方向与指令转速方向相反 100位置模式,扭矩输出方向与指令转速方向相同P1-44 128 电子齿轮比分子(根据实际情况设定)P1-45 1 电子齿轮比分母(根据实际情况设定)P1-46 1 检出器输出脉冲数设定(PG分周比)(根据实际情况设定)P2-00 40 位置回路增益(根据实际情况设定)P2-15 0 逆向运转极限为B接点设置不正确报ALM14P2-16 0 正向运转极限为B接点设置不正确报ALM14P2-17 0 紧急停止为B接点设置不正确报ALM13P2-08 10 参数重置P1-55=3001,最高转速2台达B系列:参数仅供参考伺服驱动器参数号设置内容备注P1-00 0 0:AB脉冲 1:CW/CCW 2:脉冲+符号P1-01 100 0:位置模式,扭矩输出方向与指令转速方向相反 100位置模式,扭矩输出方向与指令转速方向相同P1-44 1 电子齿轮比分子(根据实际情况设定)P1-45 1 电子齿轮比分母(根据实际情况设定)P1-46 2500 检出器输出脉冲数设定(PG分周比)(根据实际情况设定)P2-00 40 位置回路增益(根据实际情况设定)P2-13 0 逆向运转极限为B接点设置不正确报ALM14P2-14 0 正向运转极限为B接点设置不正确报ALM15P2-15 0 紧急停止为B接点设置不正确报ALM13P2-08 10 参数重置3台达AB系列:参数仅供参考伺服驱动器参数号设置内容备注P1-00 0 0:AB脉冲 1:CW/CCW 2:脉冲+符号P1-01 100 0:位置模式,扭矩输出方向与指令转速方向相反 100位置模式,扭矩输出方向与指令转速方向相同P1-44 1 电子齿轮比分子(根据实际情况设定)P1-45 1 电子齿轮比分母(根据实际情况设定)P1-46 2500 检出器输出脉冲数设定(PG分周比)(根据实际情况设定)P2-00 40 位置回路比例增益(根据实际情况设定)P2-15 0 逆向运转极限为B接点设置不正确报ALM14P2-16 0 正向运转极限为B接点设置不正确报ALM14P2-17 0 紧急停止为B接点设置不正确报ALM13P2-08 10 参数重置4台达A2系列:参数仅供参考伺服驱动器参数号设置内容备注P1-00 0 0:AB脉冲 1:CW/CCW 2:脉冲+符号P1-01 100 0:位置模式,扭矩输出方向与指令转速方向相反 100位置模式,扭矩输出方向与指令转速方向相同P1-44 1 电子齿轮比分子(根据实际情况设定)P1-45 1 电子齿轮比分母(根据实际情况设定)P1-46 2500 检出器输出脉冲数设定(PG分周比)(根据实际情况设定)P2-00 40 位置回路增益(根据实际情况设定)P2-15 0 逆向运转极限为B接点设置不正确报ALM14P2-16 0 正向运转极限为B接点设置不正确报ALM14P2-17 0 紧急停止为B接点设置不正确报ALM13P2-08 10 参数重置5台达B2系列:参数仅供参考伺服驱动器参数号设置内容备注P1-00 0 0:AB脉冲 1:CW/CCW 2:脉冲+符号P1-01 100 0:位置模式,扭矩输出方向与指令转速方向相反 100位置模式,扭矩输出方向与指令转速方向相同P1-44 16 电子齿轮比分子(根据实际情况设定)P1-45 1 电子齿轮比分母(根据实际情况设定)P1-46 2500 检出器输出脉冲数设定(PG分周比)(根据实际情况设定)P2-00 40 位置回路增益(根据实际情况设定)P2-15 0 逆向运转极限为B接点设置不正确报ALM14P2-16 0 正向运转极限为B接点设置不正确报ALM14P2-17 0 紧急停止为B接点设置不正确报ALM13P2-08 10 参数重置P2-22 08 CN127·28号脚(27接负(0V),28接正)【备注:1:上接线图默认2-22为7,即DO5取警报输出之意,所以如果按上图焊线,用O 点控制刹车即可;2:DO1-DO5为多功能输出节点,可以通过自定义其他DO的方式通过伺服控制刹车,修改P2-18-P2-22以及P2-37为8即可】二、安川连线及参数设置1安川二型系列:参数仅供参考参数编号说明初始值设定值备注Pn000 控制模式0000 0010 0000→速度模式0010→位置模式Pn100 速度回路增益40 60 (此值先为出厂值)Pn101 积分常数2000 1200 (此值先为出厂值)Pn102 位置回路增益40 50 (此值先为出厂值)Pn200 位置控制指令型态0000 0004 0000→脉波列+方向讯号0001→正转脉波列+反转脉波列Pn201 马达一回转输出脉波数163841 2000 倍频前(此值根据实际情况计算所得)Pn202 电子齿轮比(分子)4 2048 (此值根据实际情况计算所得)Pn203 电子齿轮比(分母)1 125 (此值根据实际情况计算所得)Pn408 共震率波功能0000 0001 Pn409 共震率波频率2000 200Pn50A 正转行程极限2100 8100 2100→打开正转禁止保护功能8100→关闭正转禁止保护功能Pn50B 反转行程极限6543 6548 6543→打开反转禁止保护功能6548→关闭反转禁止保护功能Fn001 自动调谐刚性设定 4 42 安川五型系列:参数仅供参考参数编号说明初始值设定值备注Pn000 控制模式0000 0010 0000→速度模式0010→位置模式Pn00b 电源设定默认三相0101 0100→单相电源0101→伺服选择单相电源,而且可显示所有参数。
FANU ai伺服电机使用知识
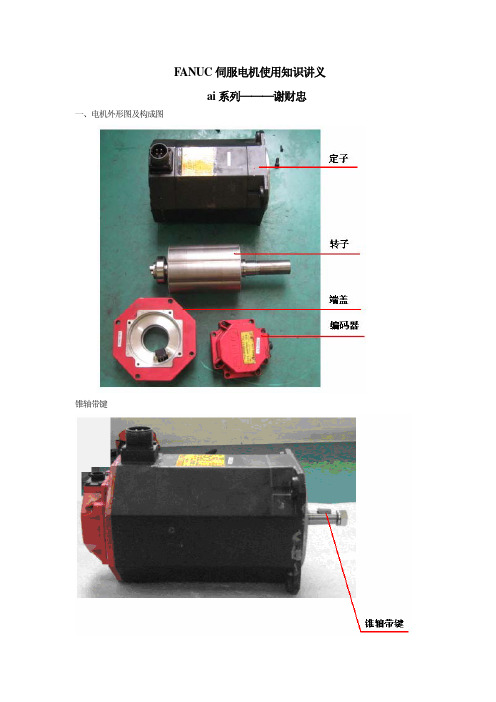
FANUC伺服电机使用知识讲义ai系列———谢财忠一、电机外形图及构成图锥轴带键光直轴直轴带键说明:如用户自已换轴承,并把前法兰拆下过,或发现定子铁芯与前法兰有明显错位痕迹,如要送最好提前告诉用户必须更换定子,因为前法兰定子铁芯与前法兰安装时有同心度要求,出厂时定子铁芯与前法兰是组成一个整体部件的,新电机如电机轴盘不动或运转时有异音,仔细观察一下定子铁芯与前法兰接合部的漆痕变化,有可能用户在安装及搬运时摔伤过电机。
二、电机型号及规格号:伺服电机aiS表示稀土材料伺服电机。
S表示强磁稀土材料Strong ai、aiF表示铁氧体材料伺服电机。
F表示氧化铁 FerrITe ßiS表示稀土材料伺服电机。
LiS表示直线伺服电机。
S表示强磁稀土材料DiS表示内装伺服电机S表示强磁稀土材料ai、aiS电机是由使用AC200-230V的放大器驱动的。
a(HV)i、a(HV)is电机是由使用AC400-460V的放大器驱动的。
三、电机编码器在电机的后端装有编码器,用来检测电机的转速及作为位置检测信号。
S系列电机用编码器信号表电机零位定义:1、电机动力插座U相接+,V、W相接-。
2、C1、C2、C4、C8用示波器测量为高电平。
ai系列电机信号表串行信号RD、*RD包含有A、*A、B、*B、Z、*Z、C1、C2、C4、C8信号。
说明:a6、a8i、β8i以下电机,更换轴承,必须把转子上的金属欧式联轴节拆下来,才能更换后 轴承,因此如用户自行更换轴承,有可能因为电机零位错误出现410、411报警,因此不建议用户自 已更换轴承。
四、制动器制动器特性见表:制动器连接管脚图电机型号a1i-a2i、a2is-a4is电机型号a4i-a40i、a8is-a200is其中4脚需要与电缆的屏蔽相连。
连接制动器(1)、不能与NC和放大器共用一个直流24V电源。
(2)、可以通过变压器全波整流成直流24V为制动器供电,但不能使用半波整流器。
华中8型伺服调整工具使用说明书-1

1.1
采样功能 ..................................................................................................................................... 7
1.2
参数功能 ..................................................................................................................................... 8
1 安装&连接 ................................................................................................................................................ 38
1 概述 ............................................................................................................................................................. 6
I 概述
1
1. 概述
1 概述
华中 8 型伺服调整工具
华中数控伺服调整工具(以下简称 SSTT)是一款用于机床调试的辅 助软件,其主要功能包括:采样功能、伺服参数功能和 G 代码功能。
SSTT 需要安装在 PC 机上使用,要求如下:
环境 操作系统 主板 网络 其他
伺服放大器使用说明书

伺服放大器使用说明书一、概述伺服放大器是自动控制系统中的一个重要组成单元,和电动执行机构配套,组成比例式电动控制机构,可广泛用于电力、冶金、化工、轻工等工业部门的自动控制系统中。
它可与DDZ-S系列电动执行机构配套,也可作为一个通用单元,应用在其它类型的电动执行机构上。
与其它类型的伺服放大器比较,有如下特点:1.电路采用智能控制系统对输入电流与反馈电流进行采样、比较,依据它们的差值大小对电机进行正反转控制。
2.系统对死区和精度进行自动调节,使控制品质最优。
3.也可手动调节死区大小以适应现场实际要求。
4.具有输入信号断路或小于一定值、位置反馈信号断路或小于一定值、反馈信号不跟随或反向变化大于一定值或固态继电器输出短路时,系统自动保护防止执行机构动作错误的功能以及开路报警、断电抱闸等功能。
二、主要技术指标1.输入信号:4~20mA2.阀位反馈输入信号:4~20mA3.输入通道:2个4.输入阻抗:250Ω5.输出功率:220VAC5A6.最大误差:2.5%7.报警输出:无源接点1常开1常闭8.工作电压:220VAC50Hz9.工作条件:环境温度0~50℃相对湿度〈85%三、接线端子图2-b9 电流输入+2-a9 电流输入-2-b11 阀位反馈输入+2-a11 阀位反馈输入-2-b3 故障状态信号输出端常闭点2-b4 常开点2-b5 公共点1-b13 接大地1-a8 火线1-a7.10 零线1-a5 接电机正转线圈1-b3 接电机反转线圈1-b8 接抱闸线圈注意: 电机接线要分清正反,正转时阀门开大,反转时阀门关小,并且阀门开度要与位返电流变化方向一致。
四、仪表的调试仪表功能性测试用两路信号源作输入信号,三个220V灯泡作负载, 2-b9 2-a9 输入一路4~20mA信号2-b11 2-a11 输入另一路4~20mA信号1-a5 1-a7 接一灯泡定义为D11-b3 1-a7 接一灯泡定义为D21-b8 1-a7 接一灯泡定义为D3正确接线后通电1、当输入电流IN大于反馈电流WF时D1灯亮2、当输入电流IN等于反馈电流WF时灯不亮3、当输入电流IN小于反馈电流WF时D2灯亮4、当输入电流IN或反馈电流WF的值小于3.5mA或断路时面板上黄灯亮,同时系统切断总电源并且送出抱闸信号(D3灭)和报警信号(常闭接点断开)。
伺服放大器使用说明书
指 输 入 操作规格
按照 pointtable 编号指定来定位(31 点)
令 point 方 table
输入位置指 令
用 pointtable 来设定,1 点的移动长度设定范围:±1[μm]~ ±999.999[mm]
式 编号 输 入 速 度 指 用 pointtable 来设定,加速/减速时间用 pointtable 来设定,
令
S 字加减速时间常数用参数 No.14 来设定
系统
带符号的绝对值指令方式、增加值指令方式、带符号的绝对值指令、增加值指令指定方式
操作规格
利用 RS-422(232C)通信数据来定位
输 入 输 入 位 置 指 利用 RS-422(232C)通信来设定
位置 令
1 点的移动长度设定范围:±1[μm]~ ±999.999[mm]
伺服放大器使用说明书 -MR-J2S-CP-
三菱通用 AC 伺服
系列
内置定位功能 型号
伺服放大器技术资料集
1、功能和构造 1.2、伺服放大器标准规格
三菱电机株式会社 H
伺服放大器 MR-J2S-□ 10C 20C 40C 60C 70C 100 200 350 500 700 10C 20C 40C
转 运 转 table
按照位置、速度指令,来执行 1 次定位动作
方 方式 式
自 动 连 续 运 速度变更运转(2 速~31 速)、自动连续定位运转(2~31 点) 转
手 动 JOG
按照以参数设定的速度指令,用接点输入或 RS-422(232C)通信来执行点动动作
运 转 手 动 脉 冲 发 通过手动脉冲发生器来进行手动移动
点)
挡 块 式 后 端 以近点挡块后端为基准,进行原点复位
伺服驱动器12A8中文资料说明书

-
外部的
-
电流模式、IR 补偿模式、测速发电机模式、电压模式
-
有刷直流电机、音圈
-
过流、过温、过压、短路(相间和相地)
机械规格
单位
值
mm(in) 129.3×75.8×2280(9.9)
℃(℉) ℃(℉)
-
0-65 (32-149) -40-85(-40-185) 独立式
路、过压和过温,关掉所有功率开关器件并输出高电平。
无连接(保留)
-
无连接(保留)
-
引脚 1 2 3 4 5
名称 -MOT +MOT POWER GND POWER GND HIGH VOLTAGE
负电机输出 正电机输出
功率接口 P2 描述/注意点
功率地(与信号地相连)
直流电源输入
I/O O O GND GND I
限制电流的最大值,但不影响最大峰值限制电流值。
TTL 电平(+5V)禁止或使能输入。悬空时使能驱动器,接地时禁止驱动器。 I
Allen-Bradley F-Series无刷伺服电机手册说明书

F-SeriesBrushless Servo Motor ManualAllen-BradleyUse of MotorsServo motors are intended to drive machinery. As such, they must be part of a controlled system that includes a transistorized electronic amplifier. They are not intended for direct connection to the power supply or for use with thyristor drives. Instructions in the amplifier and control system manuals must be observed; this document does not replace those instructions.Unless specified otherwise, servo motors are intended for use in a normal industrial environment without exposure to excessive or corrosive moisture or abnormal ambient temperatures. The exact operating conditions may be established by referring to the data for the motor. The mating of motors to machinery is a skilled operation; disassembly or repair must not be attempted. In the event that a motor fails to operate correctly, contact the place of purchase for return instructions.Safety NotesThere are some possible hazards associated with the use of motors. The following precautions should be observed. Specific Warnings and Cautions are listed inside the back cover.Installation and Maintenance: Installation and maintenance or replacement must be carried out by suitably qualified service personnel, paying particular attention to possible electrical and mechanical hazards.Weight: Large motors are generally heavy, and the center of gravity may be offset. When handling, take appropriate precautions and use suitable lifting equipment. Beware of sharp edges; use protec-tive gloves when handling such assemblies.Flying leads: Ensure that flying or loose leads are suitably restrained, to prevent snagging or entan-glement, before carrying motors with such leads.Generation: If the motor is driven mechanically, it may generate hazardous voltages at its power input terminals. The power connector must be suitably guarded to prevent a possible shock hazard. Loose motors: When running an unmounted motor, ensure that the rotating shaft is adequately guarded and the motor is physically restrained to prevent it from moving. Remove the key which otherwise could fly out when the motor is running.Damaged cables: Damage to cables or connectors may cause an electrical hazard. Ensure there is no damage before energizing the system.Supply: Servo motors must not be directly connected to a power supply; they require an electronic drive system. Consult the instructions for the drive system before energizing or using the motor. Brakes: The brakes that are included on motors are holding brakes only and are not to be used as a mechanical restraining device for safety purposes.Safety requirements: The safe incorporation of this product into a machine system is the responsi-bility of the machine designer, who should comply with the local safety requirements at the place where the machine is to be used. In Europe this is likely to be the Machinery Directive. Mechanical connection: Motors must be connected to the machine with a torsionally rigid coupler or a reinforced timing belt. Couplers which are not rigid will cause difficulty in achieving an accept-able response from the control system. Couplings and pulleys must be tight as the high dynamic performance of a servo motor can easily cause couplings to slip, and thereby damage the shaft and cause instability. Care must be taken in aligning couplings and tightening belts so that the motor is not subjected to significant bearing loads, or premature bearing wear will occur. Once connected to a load, tuning will be affected. A system tuned without a load will probably require retuning once a load is applied.Connectors: Motor power connectors are for assembly purposes only. They should not be connected or disconnected while power is applied.© 1999 Rockwell International Corporation. All rights reserved.Allen-Bradley is a trademark of Rockwell Automation.Printed in the United States of America.Information contained in this manual is subject to change without notice.Motor DataThermostat Specifications MECHANICAL DATA (1)Rotor Moment of Inertia kg-m2.0010.0021.0032.0064.0107.0162lb-in-s2.009.019.029.057.095.144Rotor Moment of Inertia Brake Motors kg-m2.0011.0022.0033.007.011.017 lb-in-s2.010.020.030.061.098.147Motor Shipping Weight kg10.415.821.425.127.545.8lb2334.847.255.473.8101Motor Shipping Weight Brake Motors kg12.517.823.929.938.351.3 lb27.639.252.66684.4113Damping Nm/krpm.06.10.15.16.24.37lb-in/krpm.5.94 1.3 1.4 2.1 3.3 Friction Torque Nm.063.11.17.17.24.46lb-in.56.94 1.5 1.5 2.1 4.1 Max. Operating Speed rpm400040003000300030003000WINDING DATA (1)Poles888888Sine Wave K T Torque Constant (2)Nm/A.54.54.73.71.70.73 lb-in/A 4.8 4.8 6.5 6.3 6.2 6.5Square Wave K T Torque Constant (3)Nm/A.60.60.80.78.80.81 lb-in/A 5.3 5.37.1 6.9 6.87.1K E Voltage Constant (4)V/krpm666689868589Winding Resistance Phase to Phase at 25±5o C Ohms±15%2.24.89.98.51.26.16Winding InductancePhase to PhasemH 6.8 3.3 3.4 3.3 1.7 1.1 Thermal Resistance o C/Watt.63.48.40.45.37.30 Dielectric Rating Power Leads (R, S, T) to Ground: 1500 VACrms 50/60 Hz for 1 minute.(1) Specifications are at 25o C unless otherwise noted.(3) Peak value of per phase square wave Amperes(2) Peak value of per phase sine wave Amperes (4) Peak value of sinusoidal phase to phase VoltsAmbient Temperature Operating: 0 to 40°C (32 to 104°F)Storage: -30 to 70°C (-25 to 158°F)Relative Humidity5% to 95% non-condensingRated Voltage0 - 250 Volts DC or 50/60 Hz AC*Rated Current************************************************Maximum Switching Current 5 AmpsContact Resistance<0.10 Ohms maximumContacts Normally closedInsulation Dielectric Mylar Nomex capable of withstanding1500 VAC RMS 50/60 Hz for 1 minuteOpening Temperature (±5o C)140o C* The thermostat is normally used as a switch for a 15VDC logic signal.Dimensional DataMotor DimensionsMotor ModelAB AH AJ AK BB BF EP L L withBrakeP S U XDTolerances mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm/in mm inchesF-4030102/4.0250/1.97 (1)145/5.71110/4.33 (2)3/.12 (3)10/.39 (4)22.2/.875 (6)194/7.64257/10.12127/5.006x6/.24x.2419/.75 (8)38/1.49123456789±0.500-0.035-0.013-0.016-0.035-0.100-0.050-0.013-0.016±0.0196-0.0013-0.0005-0.0006-0.0013-0.0039-0.0019-0.0005-0.0006F-4050272/10.71335/13.19F-4075350/13.78413/16.26F-6100131/5.1680/3.15 (1)200/7.87114.3/4.50 (2)4/.16 (3)13.5/53 (5)36.5/1.438 (7)255/10.04326/12.83173/6.8110x8/.39x.3235/1.38 (9)60/2.36F-6200320/12.60390/15.35F-6300420/16.53490/19.29NOTE: Motors are manufactured to millimeter dimensions. Inch dimensions are approximate conversions from millimeters.CONNECTOR F-4030BRAKE F-4050BRAKE F-4075BRAKE F-6100BRAKE F-6200BRAKE F-6300BRAKE BRAKE(mm/in)—56/22.0—56/22.0—56/22.0—59/23.2—59/23.2—59/23.2 ENCODER(mm/in)126/49.6189/74.4204/80.3267/105.1282/111.0345/135.8183/72.0254100.0248/97.6318/125.2348/137.0418/164.6 POWER(mm/in)172/67.7235/92.5250/98.4313/123.2228/89.8301/118.5233/91.7304/119.7298/117.3368/144.9398/156.7468/184.2Connector DataOptions: Connectors and Shaft SealsThe F-Series motor has an IP65 rating, when coupled with environmentally sealed Military Specifi-cation (MS) cable assemblies and when an optional shaft seal is installed. Equipment rated as IP65 provides protection against the ingress of dust and water projected by a nozzle (jet) from any direction. An IP65 rating is roughly equivalent to a NEMA 12 enclosure type rating. The IP65 rating applies for any orientation of motor mounting, but it is recommended to mount the motor so the connectors project down. If cable assemblies are used that are not environmentally sealed, the motor is rated IP40, with or without the optional shaft seal. With environmentally sealed cable assemblies and no optional shaft seal the motor rating is as follows: Motor mounted horizontally; IP51. Motor mounted shaft up; IP50. Motor mounted shaft down; IP53.Shaft Seal KitsShaft seals protect the motor and its bearings against dust or water entering through the shaft opening.MS Connector KitsWire and Contact Sizing RecommendationsThe following connector contact sizes and minimum wiring gages are recommended for cabling to a motor.Factory manufactured power cables and encoder cables are available in standard cable lengths of 10, 25, 50 and 75 feet (3, 7.6, 15 and 23 meters).MOTOR SERIESPART NUMBERSIZE(O Dia x I Dia x Width)F-40000041-5060 1.437” x 0.875” x 0.25” (36mm x 22mm x 6mm)F-60000041-5061 2.125” x 1.438” x 0.31” (54mm x 37mm x 8mm)NOTE: Shaft seals are manufactured to inch dimensions. Millimeter dimensions are conversions from inches. Shaft seals require alubricant to reduce wear.POWER CONNECTORENCODER CONNECTOR MOTORCONTACT AWG(mm 2)WIRE AWG(mm 2)CONTACT AWG(mm 2)WIRE AWG(mm 2)F-403012 (3.0)16 (1.5)All F-Series 16 (1.5)24 (0.25) with ULTRA Plus F-405014 (2.5)22 (0.34) with ULTRA 100-200 DrivesF-4075F-61008 (8.6)12 (4)F-62008 (10)BRAKE CONNECTORF-6300CONTACT AWG(mm 2)WIREAWG(mm 2)Sizes are recommended minimum values for 4 conductors (R, S, T and GND). Wiring should be twisted. Local regulations should always be observed.16 (1.5)18 (0.75)Recommended minimum mechanical size.Local regulations should always be observed.F-4000 Series NEMA 56C MotorsMotorsin/mmin/mmNote:NEMA 56C motors are manufactured to inch dimensions. Millimeter dimensions are approximate conversions from inches.F-4030 NEMA 56C 7.64/19410.12/257F-4050 NEMA 56C 10.71/27213.19/335F-4075 NEMA 56C13.79/35016.26/413BrakePower Encoder Motors(in/mm)(in/mm)(in/mm)F-4030 — 4.97/12.6 6.77/17.2F-4030 BRAKE 2.21/5.67.45/18.99.25/23.5F-4050 —8.04/20.49.84/25.0F-4050 BRAKE 2.21/5.610.52/26.712.32/31.3F-4075 —11.12/28.212.92/32.8F-4075 BRAKE2.21/5.613.59/34.515.39/39.1Encoder DataEncoders are factory aligned and must not be adjusted outside the factory.Encoder OutputsEncoder Phase-to-Neutral and Phase-to-Phase WaveformsLine Count 2000 (1)Supply Voltage 5 VDC Supply Current 250 mA max.Line Driver26LS31Line Driver OutputTTLIndex PulseF-2000 and F-3000 Series when key faces 180o ±10 away from the connectorsF-4000, F-6000 and F-8000 Series when key faces the connectors (0o ±10)(1) Standard line count before quadratureNOTE: Hall and ABS signals are in electrical degrees. For 4 pole commutation, 360° mechanical = 720° electrical. For 6 pole commutation, 360° mechanical = 1080° electrical. For 8 pole commutation, 360° mechanical = 1440° electricalMotor Radial Load Force RatingsMotors are capable of carrying an axial load in most applications. The following table provides guidelines for 20,000 hour bearing life with a specified radial load applied to the center of the shaft. Please consult with Rockwell Automation regarding loads, operating speeds and bearing life in your particular application to ensure the proper selection of motors.Brake Motor Application GuidelinesThe brakes offered as options on these servo motors are holding brakes. They are designed to hold the motor shaft at 0 rpm for up to the rated brake holding torque. The brakes are spring-set type, and release when voltage is applied to the brake coil.The brakes are not designed for stopping rotation of the motor shaft. Servo drive inputs should be used to stop motor shaft rotation. The recommended method of stopping motor shaft rotation is to command the servo drive to decelerate the motor to 0 rpm, and engage the brake after the servo drive has decelerated the motor to 0 rpm.If system main power fails, the brakes can withstand use as stopping brakes. However, use of the brakes as stopping brakes creates rotational mechanical backlash that is potentially damaging to the system, increases brake pad wear and reduces brake life. The brakes are not designed nor are they intended to be used as a safety device.A separate power source is required to disengage the brake. This power source may be controlled by the servo motor controls, in addition to manual operator controls.Brake SpecificationsBRAKE DATAMOTOR MAX. BACKLASH HOLDING TORQUE COIL CURRENTSERIES(Brake Engaged)(lb/in)(Nm)at 24 VDC at 90 VDCF-400044 minutes9010.20.69 ADC0.20 ADCF-600029 minutes27531.1 1.30 ADC0.48 ADCMotor InstallationObserve the following installation guidelines and those in the Product Notice:1.Do not run motors that are not properly mounted. Attach all power and data cables after themotor is mounted.2.Mount motors with connectors pointing downward and use a drip loop in the cable to keep liq-uids flowing away from the connectors.3.Consider motor case temperature if necessary to safeguard operator and maintenance staff.Maximum case temperature is approximately 100°C (212°F) for a motor used at continuous rat-ing in a 40°C ambient temperature.4.The installer must comply with all local regulations and should use equipment and installationpractices that promote electromagnetic compatibility and safety.Preventing Electrical NoiseElectroMagnetic Interference (EMI), commonly called “noise”, may adversely impact motor perfor-mance by inducing stray signals. Effective techniques to counter EMI include filtering the AC power, shielding and separating signal carrying lines, and practicing good grounding techniques. Effective AC power filtering can be achieved through the use of isolated AC power transformers or properly installed AC line filters. Physically separate signal lines from motor cabling and power wiring; do not parallel signal wires with motor or power wires or route signal wires over the vent openings of servo drives. Ground all equipment using a single-point parallel ground system that employs ground bus bars or straps. If necessary, use electrical noise remediation techniques to mitigate EMI in “noisy” environments.Knowledgable cable routing and careful cable construction improves system electromagnetic com-patibility (EMC). General cable build and installation guidelines include:1.Keep wire lengths as short as physically possible.2.Route signal cables (encoder, serial, analog) away from motor and power wiring.3.Separate cables by 1 foot minimum for every 30 feet of parallel run.4.Ground both ends of the encoder cable and twist the signal wire pairs.e shielded motor cables when necessary to prevent electromagnetic interference (EMI) withother equipment.Couplings and PulleysMechanical connections to the motor shaft, such as couplings and pulleys, require a rigid coupling or a reinforced timing belt. The high dynamic performance of servo motors can cause couplings, pulleys or belts to loosen or slip over time. A loose or slipping connection will cause system instability and may damage the motor shaft and keyway. All connections between the system and the servo motor shaft must be rigid to achieve acceptable response from the system. Connections should be periodically inspected to verify the rigidity.When mounting couplings or pulleys to the motor shaft, ensure that the connections are properly aligned and that axial and radial loads are within the specifications of the motor. The section “Load Force Ratings” provides guidelines to achieve 20,000 hours of bearing life. Additional information about load force ratings, including graphical depiction of varied load ratings and bearing life, is available for any motor from the Technical Support groups listed on the back cover.!ATTENTION: Motors and linkages must be securely mounted for a sys-tem to be operational. Disassembled equipment should be appropriately identified (tagged-out) and access to electrical power restricted (locked-out).Failure to observe these safety procedures could result in personal injury and damage to equipment.Publication Number 1398-5.6 - April 1999Part Number 0013-1062-001 Rev ACopyright 1999 Allen-Bradley Company, Inc. Printed in USAProduct InformationMotor Part Number IdentificationDisposal or Warranty Return of MotorsMotors may contain environmentally regulated materials, such as lead solder and circuit boards. When disposing of a motor, please recycle motors per regulations at your location. You may choose to return a motor for disposal by contacting your supplier.Please contact the source that supplied the motor for warranty, non-warranty, or disposal. work. All returned products require a Return Material Authorization (RMA) number for efficient processing and tracking.For more information refer to our web site: /motionFACTORY DESIGNATED SPECIAL OPTIONSAA =STANDARD FLANGEAN =NEMA 56C FLANGEOPTIONS00=STANDARD 01=90 VDC BRAKE 04=24 VDC BRAKEOPTICAL ENCODER LINE COUNTF =1000H =2000 (STANDARD)J =2500K =5000L =F-Series 00M =3000N =2000MOTOR WINDING K E VOLTAGE DESIGNATORNOTE: Special order windings availableFRAME SIZESERIES DESIGNATORF =Medium inertiaF - 4030 - Q H 00 - AA。
A8 系列伺服电机系统 说明书

3.3.配线注意事项
A8 系列伺服电机系统使用手册
序号 1
2 3 4 5
6
7 8
类型 电源电缆
电机电缆 控制线
编码器线 接地线
模拟信号电缆
制动电阻 保持制动器
配线类型
规格
线径合适、环境 同信号电缆间隔 30 厘米以上配线,不要在同一
合适
配线槽
双绞屏蔽线
控制器至驱动器的控制(非常重要)
注:请务必严格遵守以下事项,以免伤害使用者以及相关人员,或造成财产损失。
A8 系列伺服电机系统使用手册
危险 警告 注意
此栏表示“危险事件,如果不避免,可能导致人身严重伤害”。 此栏表示“危险事件,如果不避免,可能导致设备损坏”。 此标志表示“禁止”操作的内容。
注意
此标志表示必须执行的“强制”操作内容。
确保电路接线正确
否则可能导致触电事故,导致人身伤害,火灾。
使用前注意事项
打开包装后,请确认产品是否与所定购的产品 型号相同
如不相同,请立即联系产品供应商。
检查产品是否在运输过程中是否有损坏
如有损坏,请立即联系产品供应商。
保养和检查时的注意事项 u 电源的开启和切换操作应由操作人员进行 u 切断电源后的短时间内,内电路仍保持高压充电状态,检查作业应先切断电源,并在前面板上的 LED 显示消失后,经
尽量使用粗导 线
按接地电阻<100Ω的一点接地方式
屏蔽线
备注 确认电缆的线径是否 与所要求的电流相匹 配 确认电机相序与驱动 器要求一致
如电机与机床之间是 处于绝缘状态,请将 电机接地 请注意模拟量输入信 号电缆的终端连接 (因为模拟量输入信 号非常容易受到高频 干扰的影响) 良好连接,良好通风 需要配浪涌吸收电路
伺服放大器 AS-80-8 15 说明书

伺服放大器用于有刷伺服电机用户指南AS-80-8/15 用户指南第1页重要通知这份文件受下列情况和规定的限制:·这份文件中包含的信息归S.M.T.所有。
这些信息可供伺服驱动器的用户在安装时使用。
·文件中的正文及图表仅供说明和参考。
·文件中的信息变动时不做通知。
AS-80-8/15 用户指南第2页目录1.简介 (4)1.1概述 (4)1.2技术规格 (5)2.安全信息 (6)2.1 电气警告 (6)3.安装 (7)3.1 为电机匹配AS-80-8/15驱动器 (7)3.1.1 电压测量及其对应的电流有效值 (8)3.2 安装尺寸 (9)3.3 连接器信息 (10)3.3.1 J1-控制I/O连接 (10)3.3.2 J2-伺服电机连接 (11)3.3.3 J5- 编码器输入 (11)3.4 配线示意图 (12)3.4.1 连接示意图 (12)3.4.2 编码器-测速发电机转换功能 (13)3.5 电位计-调试 (14)4.控制模式 (15)4.1 转矩模式 (15)4.1.1 转矩模式-厂内电位计设置 (15)4.1.2 转矩模式-启动 (16)4.2 速度模式 (17)4.2.1 速度模式-车间电位计设置 (17)4.2.2 速度模式-启动 (18)4.3 编码器-测速发电机模式(可选择的) (19)5.发现并处理故障 (20)5.1 诊断性LED (20)5.1.1 绿色LED (20)5.1.2 红色LED (20)5.1.2.1 总线过压 (20)5.1.2.2 过电流/过热 (20)5.1.2.3 电流浪涌/接地错误 (20)5.2 其它情况 (21)5.3 检测点 (21)5.4 联系信息 (22)AS-80-8/15 用户指南第3页1.简介这份用户指南提供了有关有刷驱动器AS-80-8/15的产品规格,配线示意图,控制模式(转矩和速度)和发现并处理故障的程序等信息。
AB伺服手册

安装说明Kinetix 3 组件伺服驱动器(目录号 TL-A110、-A120、-A130、-A220、-A230、-A2530、-A2540、A310 和 -A410)本出版物提供了 TL 系列电机的安装说明。
如果您负责安装这些 Allen-Bradley® 电机产品,请阅读本文档。
请在安装电机前阅读所有说明。
主题参见页码收货和存储 2环境防护等级 2工作温度和轴材料 3电机目录号标识 4准备安装电机 5电机安装和维护指南 5 延长电机寿命 6对电机轴进行机械连接7安装电缆8预防电噪声8使用轴密封件9安装 TL 系列电机9电机负载力额定值11连接器数据13安装尺寸15公制框架16NEMA 框架18拆卸和安装轴键20附件21相关文档232 TL 系列伺服电机安装说明收货和存储从货运公司收到货物时,客户负责检查设备。
对照订单检查收到的物品。
如有任何运输损坏或物品丢失,请立即通知承运商。
在满足以下环境条件的清洁干燥处存储电机:环境条件说明存储温度-10°至 85° C (14°至 185° F)相对湿度20% 至 85%,无凝露大气无腐蚀性环境防护等级根据防护标准 (IP 等级) 的相应环境保护等级,TL 系列电机、连接器和散头引线的符合性如下。
TL 系列电机等级说明1带可选轴密封件的电机2IP65防尘,防喷水不带轴密封并且按照以下方向安装的电机:轴朝下轴水平轴朝上IP53IP51IP50防尘,防溅水防尘,防垂直滴落的水滴防尘,无特殊防潮功能散头引线和连接器IP30防止直径大于 12.5 mm (0.5 in.) 的物体进入,无特殊防潮功能1 IP 等级说明仅供参考。
欲了解更完整的等级说明,请参见相关国际标准。
2 要达到 IP65 防护等级,需要使用可选的轴密封套件。
请参见第 21 页的附件。
TL 系列伺服电机安装说明3工作温度和轴材料条件或材料说明工作温度0°至 40° C (32°至 104° F)轴材料碳钢轴键材料碳钢4 TL 系列伺服电机安装说明电机目录号标识工厂指定选项AA = 标准AN = NEMA 安装法兰 / 轴抱闸2 = 无抱闸4 = 24VDC 抱闸连接器3 = 带连接器的散头引线,30cm外壳 / 轴键 / 轴密封J = IP65 外壳 / 轴键 / 无轴密封K = IP65 外壳 / 无轴键 / 无轴密封反馈B = 17位,带备用电池的多圈绝对编码器(无电池时为单圈)额定转速M = 4500 rpmP = 5000 rpm永磁叠片长度标识符法兰尺寸公制电机的安装螺栓圆周直径或 NEMA 尺寸1 = 46 mm 或 NEMA 17 3 = 100 mm2 = 70 mm 或 NEMA 234 = 115 mm25 = 90 mm 或 NEMA 34电压额定值A = 230 VAC系列标识符TL = 低惯量TL 系列伺服电机安装说明5准备安装电机1. 从货运箱中小心取出电机。
A8报警控制箱用户手册

用户使用手册A-8数字监控报警控制箱尊敬的用户:非常感谢您选择使用本公司生产的报警控制箱,在安装使用之前,请您仔细阅读本手册。
本手册包括A8报警控制箱的基本安装及使用说明。
手册准确性:虽对本手册的准确性作了仔细检查,但可能包含技术上不准确的地方或印刷错误。
对由于使用本手册而导致的失误,我公司不承担任何责任。
本手册的内容及报警箱的硬件、软件将做不定期的更新和修改,恕不另行通知。
第一章报警控制箱简介1.1报警控制箱的组成和功能1.1.1 报警控制箱的组成1.1.2 报警控制箱的功能第二章报警控制箱的性能和技术指标 2.1 性能2.2 技术指标第三章报警控制箱的安装3.1 硬件安装3.1.1 安装步骤3.1.2 注意事项3.2 设备面板说明及接线3.2.1 前面板3.2.2 后面板3.3 物理通讯接口引脚定义3.3.1 RS232标准串口D9引脚定义 3.3.2 RS422串口接线定义3.4 探测器连接说明3.4.1 探测器电源连接3.4.2 探测器信号线连接3.4.3 报警喇叭连接3.4.4 联动输出口连接第四章报警控制箱的操作说明 4.1 报警控制箱设置4.2 数字监控软件控制操作 4.3 键盘控制操作第五章常见问题及注意事项附录A 装箱清单附录B 技术服务信息附录C 用户信息卡第一章报警控制箱简介1.1 报警控制箱的组成和功能本报警控制箱是针对数码监控系统而设计的。
采用嵌入式MCU技术,通过计算机串口实现报警通讯和报警控制。
不仅可以与数码监控服务器配套使用,也可选用报警控制键盘独立工作。
1.1.1 报警控制箱的组成基本部分1、控制主板控制主板是产品的核心,完成报警输入、联动输出、报警通讯(RS232/RS422接口)及报警喇叭驱动等基本功能。
2、前面板提供报警控制箱布/撤防状态和报警状态显示。
3、后面板提供报警输入端口、报警输出端口、联动输出端口以及通讯端口。
4、机箱和电源机箱采用标准1U上架安装机箱,内置12V/3A开关电源。
时光科技A系列伺服控制器说明书
使用说明书IMS-A系列伺服控制器简易调试说明时光科技有限公司目录前言 (2)概要 (3)主回路接线图 (4)控制回路接线图 (5)输入接口介绍 (6)输出接口介绍 (7)编码器信号介绍 (8)单项脉冲列信号介绍 (9)模拟量信号介绍 (9)通讯信号介绍 (10)跳线、拨码开关介绍 (10)操作面板的使用 (12)故障报警含义及解决办法 (16)系统参数一览表 (18)参数的调节与初始化 (20)前言请在产品调试之前,详细阅读调试说明书,请妥善保存随机附送的说明书并交由该机器的使用者。
伺服控制器是精密的电子电气产品,为了操作者及机械设备的安全,请交于专业的电气人员安装试车及参数调整,并请仔细阅读该说明书,若有任何疑惑请联系本公司洽谈,我们的专业人员会热诚为您服务。
⏹概要IMS-A系列伺服控制器是时光科技有限公司最新推出的全数字化交流异步电动机伺服控制器,具有结构紧凑、使用方便、可靠性高的优点,适用于各种高精度控制的场合。
产品的技术特点●硬件构成先进可靠⏹专用CPU对电机进行全数字化控制。
⏹智能化功率模块。
⏹优化设计的模块化功能电路。
⏹电流、速度、位置三闭环系统。
⏹内置制动单元。
●软件功能完善灵活⏹实时操作系统,滑差频率矢量控制。
⏹专用、开放、简单易学的QMCL运动控制语言。
●控制功能全面精确⏹稳定的转速控制。
⏹精确的位置控制。
⏹优良的转矩控制。
●集成PLC控制功能,各种可编程I/O、A/D、D/A、脉冲列接口及通信接口齐全。
●配用本公司SM系列电机,可达到最高3倍的过载使用能力。
产品型号词语说明:1、主控板类型:·双PG型,除控制器自身所控电机的PG接口外,另配一个外部轴PG输入接口。
·单PG型,只有控制器自身所控电机的PG接口,无外部轴PG输入接口2、PG(Pulse Generation):在本说明书中特指用于电机控制和外部给定的脉冲发生器或编码器。
本说明书里涉及到的PG,都是线驱动增量型编码器。
A8中文说明书

Head Up Display用户使用手册概述感谢您购买本公司生产的汽车平视显示器HUD本产品是为了汽车的安全行驶而研发,在高速行驶时,特别是夜间高速行车时,为避免驾驶员低头观看仪表显示或观看音响显示,在前方遇有紧急情况就有可能因来不及采取有效措施而造成事故。
HUD正是在关键时刻体现出极为细腻的关怀,该技术把汽车行驶过程中仪表显示的重要信息(如车速)投射到前风挡玻璃上,不仅能够帮助对速度判断缺乏经验的新手控制自己的车速,避免在许多的限速路段中因超速而违章,更重要的是它能够使驾驶员在大视野不转移的条件下瞬间读数,始终头脑清醒地保持最佳观察状态。
HUD提供了很多汽车上用得到的功能,可以使您在体验速度的同时也保证自己的驾驶乐趣与行车安全。
本产品采用了最新的性能稳定的集成电路设计而成,各项指标均符合中国标准,外形独特大方,线条流畅,超薄的机身自然美观,为您的爱车增添一份美感。
在您使用本产品前,请详细阅读说明书,以便于充分发挥产品的所有功能。
HUD主要功能特点1.自动适应车型,符合OBD II 或EUOBD(车载自动诊断系统)的车型即插即用2. 5.5英寸超大屏高清显示3.多色彩屏设计,让画面更丰富,更易读取4.采用纳米技术消除多余反射,画面更清晰。
5.新增行驶里程测量6.显示内容丰富:行驶速度,引擎转速,水箱水温电压瞬间油耗,平均油耗,行驶里程测量,换挡提醒疲劳驾驶提醒,电压过低报警水温过高报警,超速报警,发动机故障报警,消除故障码公里英里自由切换7.自动开关机,随车启动,随车关机,有效保护汽车电瓶;同时保留手动开关机方式,更有益于控制HUD8.自动和手动亮度调节模式,行车不刺眼HUD按键功能1.OBDII 数据接口作为连接汽车的数据接口2.电源开关3. 设置拨轮,分别可以上拨,下拨,直按进行设置HUD屏幕功能1 感光元件: 感应外界光强度,自动调节HUD亮度以适应环境2 转速:显示发动机转速状态,亮到的刻度代表达到的转速3 警示图标:分别为换挡提醒,超速报警发动机故障疲劳驾驶图标蜂鸣器4 速度:数字显示汽车的行驶速度5 转速单位:发动机的转速,每分钟1000转6 单位符号:KM/H-公里单位,MPH-英里,KM/H-时速单位,RPM-转速7 水温显示:显示汽车的水箱温度8 警示图标:分别为水温电压超速图标9 单位符号:℃-摄氏度,℉ -华氏度KM行驶公里V 电压M英里。
2HS2A8型步进电机驱动器说明书

1. 2. 3.
输入信号公共正端 5V ,对应不需加限流电阻; 输入信号公共正端 12V ,对应需加限流电阻1K; 输入信号公共正端 24V/相,通过驱动器侧面的 精密电位器连续设置相电流,顺时针调节电流增大,调节 范围为0.2~2A。 具体调节方法如下: 1. 先将电位器顺时针调到底~回退一小格,电流 2A~1.8A; 2. 回退二格,电流 1A;回退三格,电流 0.7A; 3. 回退四格,电流 0.5A;回退五格,电流 0.4A; 4. 回退六格,电流 0.35A;回退七格,电流 0.3A; 5. 回退八格,电流 0.25A;回退至最低,电流 0.2A;
本驱动器采用直流电源供电,机壳侧面的绿色指示灯指示设备正常工作。 电源电压在12~30VDC之间均可以正常工作。采用较低的电源电压会使电机 高速运行力矩下降,但有助于驱动器降低温升和增加低速时的运行平稳性。 所 加电源的输出能力应不少于电机的额定相电流, 电源电压越低则对电源电流输 出能力的要求越大。接线时务必注意电源正负,切勿反接! 电源质量的好坏直接影响到驱动器的性能,电源的纹波大小影响细分精度。 电 源共模噪声的抑制能力影响系统的抗干扰性,因此对于要求较高的应用场合, 用户一定要注意提高电源的质量。 当电源电压较高,且电流较大时,由于控制功率大,驱动器可能会有发热 现象,请注意做好驱动器的散热。
使用环境和参数
使用环境 冷却方式 环境温度 湿 度 安装尺寸 避免油雾、粉尘及腐蚀性气体 自然冷却或强制风冷 0~+55℃ 5~95%RH(不结露) 85×45×22mm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.3.配线注意事项
A8 系列伺服电机系统使用手册
序号 1
2 3 4 5
6
7 8
类型 电源电缆
电机电缆 控制线 编码器线 接地线
模拟信号电缆
制动电阻 保持制动器
配线类型 线径合适、环境 合适
双绞屏蔽线 尽量使用粗导 线
屏蔽线
规格
同信号电缆间隔 30 厘米以上配线,不要在同一 配线槽
驱动器的接地线必须和真正的大地相连
否则可能导致触电事故。
安装一个外部紧急断电装置,以便在紧急情况 否则可能导致触电事故,导致人身伤害或火灾,设备
下断开电源
损害。
请勿让电缆承受过度的外力、摩擦
否则可能导致触电事故,导致人身伤害或火灾,设备 损害。
按照规定的组合使用电机和驱动器
否则可能导致火灾。
请勿把持电缆或电机轴搬运电机
请勿接触运转中电机的转动部分
否则可能导致人身伤害。
请勿更改、拆卸或自行修理电机或驱动器
否则可能导致触电事故,导致人身伤害。
搬运电机时,请勿提拉电缆或电机轴部
否则可能导致器件损坏。
在电源故障排除后,设备有可能突然重新启 动,所以不要靠近设备
否则可能导致触电事故,导致人身伤害。
请勿堵塞散热孔或插入异物
否则可能导致触电事故,导致人身伤害,火灾。
定义 指令脉冲正极输入。 指令脉冲负极输入。 方向指令正极输入。 方向指令负极输入。
输入 I/O X0。 输入 I/O X1。 输入 I/O X2。 输入 I/O X3。 输入 I/O X4。 输入 I/O X5 (CWL)。 输入 I/O X6 (作为伺服使能输入)。 输入 I/O X7 (CCWL)。 输入 I/O X8 (保留)。 输入 I/O X9 (保留)。 输入 I/O X10(保留)。 输入 I/O X11(保留)。 脉冲禁止输入。 输入端子公共正极。 内部提供用于 I/O 的控制电源+12V。 内部提供用于 I/O 的控制电源 0V。 Y0,定位完成输出,为集电极开路输出。 Y0 输出负极。 Y1,报警输出,为集电极开路输出。 Y1 输出负极。 Y2,伺服准备好输出,为集电极开路输出。 Y2 输出负极。 Y3 输出,为集电极开路输出。 Y3 输出负极。 Y4 输出,为集电极开路输出。 Y5 输出,为集电极开路输出。 Y4,Y5 输出公共端。 编码器 A 相分频输出,为集电极开路输出。 编码器 B 相分频输出,为集电极开路输出。 11
A8 系列伺服电机系统使用手册
图 3.7 驱动器电气总接线图 10
4. 输入/输出端子功能说明
A8 系列伺服电机系统使用手册
4.1 JP2 端子定义
驱动器上的 JP2 接口为各种控制信号输入输出接口,为 50 PIN 高密接口,其管脚定义如下:
名称定义 PP PG DP DG X0 X1 X2 X3 X4 X5 X6 X7 X8 X9 X10 X11 X12
确保电路接线正确
否则可能导致触电事故,导致人身伤害,火灾。
使用前注意事项
打开包装后,请确认产品是否与所定购的产品 型号相同
如不相同,请立即联系产品供应商。
检查产品是否在运输过程中是否有损坏
如有损坏,请立即联系产品供应商。
保养和检查时的注意事项 电源的开启和切换操作应由操作人员进行 切断电源后的短时间内,内电路仍保持高压充电状态,检查作业应先切断电源,并在前面板上的 LED 显示消失后,经
控制器至驱动器的控制线长度<3 米 驱动器至编码器的编码器线长度<20 米 按接地电阻<100Ω的一点接地方式
备注 确认电缆的线径是否 与所要求的电流相匹 配 确认电机相序与驱动 器要求一致
如电机与机床之间是 处于绝缘状态,请将 电机接地 请注意模拟量输入信 号电缆的终端连接 (因为模拟量输入信 号非常容易受到高频 干扰的影响) 良好连接,良好通风 需要配浪涌吸收电路
型号
重量(Kg)
PSDA-0133A6/A8
1
型号
40BL(3)03-xxH 40BL(3)05-xxH 40BL(3)10-xxH
驱动器
型号
重量(Kg)
PSDA-0113A6/A8
0.7
型号
57(40)BL(3)03-xxL1 57(40)BL(3)05-xxL2 57(40)BL(3)10-xxL3
0 安全警告(非常重要)
注:请务必严格遵守以下事项,以免伤害使用者以及相关人员,或造成财产损失。
A8 系列伺服电机系统使用手册
危险 警告 注意
此栏表示“危险事件,如果不避免,可能导致人身严重伤害”。 此栏表示“危险事件,如果不避免,可能导致设备损坏”。 此标志表示“禁止”操作的内容。
注意
此标志表示必须执行的“强制”操作内容。
3.2.驱动器安装注意事项
安装位置:室内,无水、无粉尘、无腐蚀气体,良好通风; 如何安装:垂直安装,通风良好; 安装到金属的底板上; 如可能,请在控制箱内另外安装通风风扇; 驱动器与电焊机、放电加工设备等使用同一路电源,或驱动器附近高频干扰设备,请采用隔离变压器和有源滤波器; 请将驱动器安装在干燥且通风良好的场所; 请尽量避免受到振动或撞击; 尽一切可能防止金属粉尘及铁屑进入驱动器内; 安装时请确认驱动器固定,不易松动脱落; 接线端子必须使用带有绝缘保护; 在断开驱动器电源后,必须间隔 10 秒钟后方能再次给驱动器通电,否则频繁的通断电会导致驱动器损坏; 在断开驱动器电源后 10 分钟内,禁止用手直接接触驱动器的接线端子,否则将会有触电的危险! 当在一个机箱内安装多个驱动器时,为了驱动器的良好散热,避免相互间电磁干扰,请采用如下示意:(图 3.1)
A8 系列伺服电机系统使用手册
否则可能引发火灾。
电机相序、编码器配线应正确布线
否则可能导致受伤、故障、产品损坏。
必须安装过流保护器、漏电保护的断路器、过 热保护器和紧急断电装置
断开电源后,必须等待 10 分钟后才可以进行 机器搬运、接线和检查等操作
否则可能导致触电事故,导致人身伤害或火灾。 否则可能导致触电事故,导致人身伤害或火灾。
重量(Kg) 1.5
2.5
PSDA-4033A6/A8
4.0
型号 40BL(3)03-xxH 60BL(3)40-xxH 60BL(3)60-xxH 92BL(3)75-xxH 92BL(3)100-xxH 92BL(3)120-xxH
型号 123BL(3)150-xxH 123BL(3)200-xxH 123BL(3)300-xxH 123BL(3)400-xxH
否则可能导致灼伤。
请勿在电机、驱动器、再生放电电阻附近放置 易燃物
否则可能会引发火灾。
请勿将控制器设置在电炉或大型线圈电阻器 等发热体附近
否则可能会引发火灾或导致故障发生。
必须设置过电流保护器、漏电断路器、过热保 护器、紧急制动器
否则可能导致触电。
在外部设置紧急制动器,以便在发生紧急情况 否则可能导致受伤、触电、引发火灾、故障或 产品
否则可能导致受伤。
请勿使用设置在主电源上的电磁接触器进行 电机的运转和停止操作
否则可能导致故障发生。
请勿使用爬至机器上或在其顶部放置重物
否则可能导致触电、受伤、故障、产品损坏。
切勿强烈撞击设备
否则可能导致故障发生。
切勿对驱动器进行极端的增益调整和变更 勿使机械的运转发生不稳定的情况
请勿将电机的内部保持制动器用于停止电机 运转负载(制动)
电机和驱动器应在额定使用的温度下使用
否则可能导致故障发生。
请将电机固定,并在切断机械系统的状态下进 行试运转的动作确认,之后再进行连接机械系 统
请使用串联方式连接制动器孔子继电器和紧 急短路继电器
否则因,并确保安全 性后,方可重新启动
立即停止运转并切断电源
损坏。
切断电源,经过机身所示时间以上后,方可进 行驱动器的移动、配线、检查等操作
否则可能导致触电。
请务必牢固设置和安装,以免在发生地震时, 引发火灾或导致人身伤害
否则可能导致触电、受伤、引发火灾。
布线作业应由电气工程专家实施 1
否则可能导致漏电。
电机、驱动器、再生放电电阻应安装在金属等 不燃物上
6
A8 系列伺服电机系统使用手册
3. 安装和配线
3.1.电机安装注意事项
安装位置:室内,无水、无粉尘、无腐蚀气体,良好通风; 如何安装:电机可以水平或垂直安装,当水平安装时,请把电缆出口朝下,以免进油进水;垂直安装时,如果配有机
械装置,必须取保机械装置的油水不得进入电机; 禁止敲打电机后端盖,以免损坏电机的光电编码器; 请尽量使用弹性联轴器; 尽量避免敲打电机的轴端,以免损坏电机的轴承和后端的编码器; 需注意电机轴端的轴向和径向负载不要过大;
DI_COM+ E12V EGND Y0 Y0_E Y1 Y0_E Y2 Y2_E Y3 Y3_E Y4 Y5
DO_COMAout Bout
管脚 30 31 32 33 7 8 9 34 10 11 36 12 37 19 43 42 35 13 46 47 39 38 41 40 22 44 20 21 23 24 25 28 29
排除电源故障后,设备可能重新驱动, 切勿靠近设备, 请对机械进行设置,使其重新启动时也能确保 人身安全
否则可能导致受伤。 否则可能导致受伤或故障发生。 否则可能导致受伤。
切勿进行改造,拆卸或自行修理
否则可能导致触电或引发火灾和受伤。
请勿过度用力拉拽电缆
否则可能导致故障发生。
请使用指定配套型号的电机
否则可能引发火灾。
驱动器
PSDA-1953A6/A8 PSDA-3053A6/A8
… PSDA-22553A6/A8