torque中文教程--AI巡逻
1-Torque1.5中文教程
Torque 1.5 – 介绍教程欢迎来到Torque的世界祝贺你买了我们的Torque 游戏引擎。
这个教程会带领你参观大部分Torque的基本功能,也是你开始自己做游戏的一个起点。
做完这个教程时,我们已经做好了一个简单的3D游戏!在我们进入Torque世界以前,有两点值得注意。
在这个教程中,当你看到诸如“Select File > Open Mission”,它意味着点击File菜单中的“Open Mission”选项。
至于文件的位置,我们假定你把Torque安装在了某个硬盘根目录的/Torque/SDK目录。
第2点,这个教程是写给PC平台用户的,如果你使用的是苹果系统,我们强烈建议你使用两个按键的鼠标,同时用Option键代替Ctrl键的操作。
另外,应用程序文件在Mac中被叫做“二进制文件”的,我们在这里叫“可执行文件”。
开始页在Torque/SDK/example目录下,你会发现名为torqueDemo可执行文件。
当你运行torqueDemo的时候,你会发现如下的开始页面:那顶上的一群图标是到TGE工具和文档的快捷方式。
GUIEditor是制作图形用户界面的工具。
World Editor是创造你的游戏世界并添加物体。
Console是提供通过文字界面访问和控制游戏引擎的脚本。
在这个教程中,我们将要探索GUI和World编辑器,并且我们会快速浏览一下Console。
至于TDN,News,Docs,和Forums图标是关于Torque信息的网页的链接。
Tutorial是本教程的链接。
Options让你能设置普通的图形和声音选项,比如屏幕分辨率或音量等。
最后,Exit 就像你想象中的那样,退出这个引擎。
我们在这个教程中不会深入介绍Torque 的Consol (控制台),只是让你知道它能做什么,点击这个图标,在Consol 窗口你可以看到引擎启动后的一些进程记录。
你不仅仅可以用它来得到文字反馈,你也能直接在文字输入框中输入命令,举个例子,输入“quit();”,当然,这个命令退出了TGE 。
torque中文教程--开场画面

StartupGui.done = false; Canvas.setContent( StartupGui ); schedule(100, 0, checkStartupDone ); // If you want a sound or music to play add a new AudioProfile to client\scripts\audioProfiles.cs
6. 进入游戏引擎,在选项里打开声音了?好,我们继续做下去。 8.仍然在“StartupGui.gui”中,将脚本复制一遍,并做相应的改动,改动后内 容如下:
//--- OBJECT WRITE BEGIN --new GuiFadeinBitmapCtrl(StartupGui) {
// start.ogg 可在素材文件夹中复制
5.存盘,听下声音吧。是不是声音小的可怜?的确如此,我们需要打开
"game\client\defaults.cs"文件,可以看到声音的初始值是“0.8”,,将他们都 修改为“1”:
$pref::Audio::masterVolume = 1; $pref::Audio::channelVolume1 = 1; $pref::Audio::channelVolume2 = 1; $pref::Audio::channelVolume3 = 1; $pref::Audio::channelVolume4 = 1; $pref::Audio::channelVolume5 = 1; $pref::Audio::channelVolume6 = 1; $pref::Audio::channelVolume7 = 1; $pref::Audio::channelVolume8 = 1;
智能巡检管理系统V软件说明书
智能巡检管理系统V3.5.7软件使用说明书服务源于诚信品质源于专业目录第一章软件安装 (2)1.1 软件运行环境要求 (2)1.2 如何安装软件系统 (2)1.3 如何卸载软件 (3)1.4 系统登录 (3)第二章基础信息 (4)2.1 设置巡检线路 (4)2.2 设置巡检地点 (6)2.3 巡检线路与地点绑定 (10)2.4 设置巡检人员 (12)2.5 设置巡检器号码 (12)2.6 巡检计划排班设置 (14)第三章数据处理 (18)3.1 读取巡检器数据 (18)2.2 巡检情况查询 (20)3.3 原始记录查询 (21)3.4 合格率统计 (22)3.5 重新分析数据 (23)第四章系统维护 (24)4.1 巡检器设置 (24)4.2 数据库初始化 (25)4.3 恢复数据 (26)4.4 清理巡检数据 (27)第五章可能遇到的问题和解决方法 (28)5.1 软件安装完成后找不到巡检器,无法上传数据 (28)5.2 USB驱动已正确安装,还是无法上传数据 (31)5.3 原来可以上传数据,软件系统突然读不了数据了 (33)第一章软件安装1.1 软件运行环境要求计算机硬件推荐配置:当前主流兼容机均可满足要求。
建议CPU:P4 1.7G以上,内存:512M,硬盘空间:10G以上。
WINDOWS操作系统平台,推荐采用WINDOWS XP/2000操作系统。
1.2 如何安装软件系统运行软件光盘中的智能巡检管理系统V3.5.7.EXE文件,依据提示完成安装。
应用程序安装结束时请选择Install安装USB 驱动程序,如果省略此安装步骤,系统将无法读取巡检器数据。
1.3 如何卸载软件在系统“开始”—“程序”—“智能巡检管理系统V3.5.7”中选择“卸载智能巡检管理系统V3.5.7”即可。
建议您只使用上述方法卸载本软件,其它方法可能造成系统运行故障。
1.4 系统登录管理员登录密码:9999操作员登录密码:0000第一次启动使用本系统时以管理员身份登录,要进行必要的基本信息设置,并请将计算机的时间校准为北京时间。
人工智能在智能巡逻机器人中的应用研究

人工智能在智能巡逻机器人中的应用研究简介:随着科技的快速发展,人工智能(AI)应用于各个领域,其中之一就是智能巡逻机器人。
智能巡逻机器人结合人工智能技术,能够自主感知环境、规划巡逻路线、执行巡逻任务和与环境进行交互。
本文将探讨人工智能在智能巡逻机器人中的应用研究,包括环境感知、路径规划、任务执行和交互界面等方面的内容。
一、环境感知智能巡逻机器人需要具备对环境的感知能力,以便及时发现异常情况或者潜在的威胁。
人工智能技术在环境感知方面发挥着重要作用。
通过搭载各种传感器,如摄像头、红外线传感器、声音传感器等,机器人可以实时获取环境信息,并利用人工智能算法对这些信息进行处理和分析。
比如,机器人可以通过图像识别技术来判断环境中是否有可疑的人物或者异常的物体;通过声音识别技术来判断环境中是否有异常的噪音或者求救声音等。
这些感知技术有效地提高了智能巡逻机器人的监控能力和对环境感知的准确性。
二、路径规划一旦机器人发现了异常情况,它需要能够智能地规划巡逻路径,以便将相关信息传达给警务人员或者相关部门。
人工智能技术在路径规划方面的应用已经取得了显著的进展。
通过结合机器学习算法和地图数据,机器人可以自动规划最短路径,避开障碍物,并考虑到交通状况和巡逻任务的优先级。
此外,机器人还可以根据环境变化实时调整巡逻路径,以适应不同的场景和任务需求。
这种智能化的路径规划系统大大提高了巡逻机器人的效率和灵活性。
三、任务执行智能巡逻机器人在完成巡逻任务时,需要具备一定的智能决策能力。
人工智能技术的应用为机器人提供了一种智能决策的方法。
基于机器学习的算法,巡逻机器人可以通过学习和分析历史数据,预测可能发生的事件,从而制定最佳的应对策略。
例如,机器人可以在预测到有风险事件发生的地方提前布防或加强巡逻;在发生突发事件时,机器人可以通过即时获取情报信息并与监控中心进行实时通讯,以协助应急响应。
通过智能化的任务执行,巡逻机器人能够更加有效地应对各类情况,提高应急处理的速度和准确性。
安泽 智能巡逻机器人PPT-V1.00

香港超人智能SuperRobotics集团旗下( 港股代码:08176 )
机器人发现公共场所有可疑人物, 并回传监控中心
派遣警务人员到现场处置事件
应用案例 & 权威认可
香港超人智能SuperRobotics集团旗下( 港股代码:08176 )
服务体系
提供一站式定制化系统 解决方案,满足不同应 用场景下客户需求。
时间
充电时间:5 h,自主充电 电池更换:支持,快速更换电池 续航时间:8 h 续航里程:20 km
避障
激光雷达 超声波传感
行车摄像头
4路高清无缝监视
[天巡号Ⅱ] 室外巡逻机器人 | AN-D
尺寸和重量
尺寸:1190 mm x 710 mm x 1610 mm(长×宽×高) 重量:170 kg
导航
导航定位精度:±100 mm 离地间隙:80 mm
移动性能
最大速度:1.5 m/s 巡航速度:0.3-1.1 m/s 底盘:带减振的差速底盘 转弯半径: 无(原地旋转) 最大攀爬角度:10° 最大越障高度:30 mm 最大越沟宽度:50 mm
智能语音
搭载AI智能语音系统 搭载IP对讲系统 搭载远程喊话系统,声压:>80 dB
通讯性能
通讯带宽: Wi-Fi模式传输速率:30 Mb/s 同时接入数量:5台 无线网络传输模式:4G 或 WLAN
智能
安保・巡逻行业
智能机器人产品系列
香港超人智能SuperRobotics集团旗下( 港股代码:08176 )
研发&产业化实力
公司现有一支近百人的研发团队,分别位于加拿大多伦多和中国深圳。 团队中,具有博士以上学历的有25人,各技术学科带头人均有超过20 年的行业经验。专长覆盖机器人总体设计、机器人系统工程、机器人 导航、运动控制、图像与数据链、遥测与遥控、人工智能、控制系统 和软件研发等方向。
智能巡检管理系统Tiger V2.0使用说明书
前言感谢您使用本公司的“智能巡检管理系统”。
本手册适用于:智能巡检管理系统Tiger V2.0版郑重声明如下:1、未经本公司许可,本手册及软件的任何部分不得以任何方式复制或抄袭。
2、因使用不当引起的损失,本公司概不承担任何责任。
为了您能正确地设置和使用本系统并得到最佳性能,保证长期使用,请必须仔细阅《智能巡检管理系统软件使用说明书》3、因技术发展需要,本公司保留未经通告而变更本手册、软件及硬件产品性能指标的权利。
4、使用时请注意爱护产品,这是延长其寿命的最好方法。
巡检软件设置简要说明图示第一章智能巡检管理系统概述1.1简介随着社会的进步与发展,各行业对其管理工作的要求越来越规范化、科学化。
各单位对定期定点进行维护、检测人员的责任心的要求也越来越高。
及时消除隐患、防患于未然是每一位企业领导、管理者的希望。
智能巡检管理系统是由我公司引进最新的技术将信息采集技术与计算机技术紧密结合,适应各类巡检情形的巡检系统。
该系统极大地提高了各类巡检工作的规范化及科学化水平,杜绝了对巡检人员和被巡检对象无法科学、准确考核与监控的现象,有效地保障了被巡检设施经常处于良好状态。
1.2运作过程1、连接硬件设备,并给巡检器校时保持与电脑时间一至;2、将信息钮安装在需要巡检的地点;3、按实际工作需要确定巡检线路,并在软件中作相应的设置;4、确定每条巡检线路中的巡检地点,可规定停留时间;5、确定巡检人员;6、确定每条巡检线路中所使用的巡检器号码;7、按月份确定每条巡检线路的巡检计划时间段及相应的巡检人员;8、如果使用感应式巡检器还要确定状态(事件)代码所代表的信息描述。
9、基础设置备份;1.3工作过程根据要求的时间段、巡检地点,工作人员沿指定的线路行进巡检,每到一处,在巡检的同时,用巡检器识读安装在该地的信息钮(或感应器)。
识读时,巡检器会自动记录当前的地点(钮号或卡号)、日期和时间,如有停留时间要求,则应按规定停留时间再次读取。
智能巡检管理系统软件使用说明书
智能巡检管理系统使用说明书目录一、软件使用说明二、软件安装过程:三、巡更设备与电脑连接四、操作步骤:五、软件操作流程六:数据下载:七、注意事项与系统维护八、常见故障处理九、包装、运输及贮存十、客户服务和技术支持承诺十一、产品保修卡、保修款一、软件使用说明1、功能特点●本系统采用数化设计,使用与设置更灵活;●为能清晰表示巡查线路和巡查人员的上下级隶属关系,线路和人员均采用树型结构;●不同的巡更线路中可含有相同的地点,(一个和多个),解决了不同线路中地点交叉问题;●对每条线路中的地点可以自由排序,并可对每个地点设置停留时间和特殊时间;●巡查计划按月份制定,并设置为具体的时间段,●为更好的适应巡查人员的情况,本系统采用两种方式:一种是每个人员加配感应卡的识别方式,另一种是不配加人员卡的方式,而是在排定巡查计划同时,也将相应的人员进行相应的排定。
●巡查结果查询可以进行多条件任意组合;●可按月份、时间和人员统计巡查结果;●为了使用系统数据更为安全,由系统管理员赋予操作员的管理权限;2、配置要求二、管理软件安装过程1) 点击光盘里Setup.exe,出现以下界面,点击下一步,直到完成即可。
2)点击桌面图标3)软件默认用户名Admin,默认密码为空,可进入软件[设置]菜单下[用户设置]里添加和修改登陆名信息。
4)点击创建Access数据库5)提示创建成功,请重新进入系统6) 软件界面:三、巡更设备与电脑连接1)数据电缆的DB9接口或USB口端连至电脑串口,令一端USB接口连至巡查仪或通讯座。
2)在进行巡查仪和电脑通讯任何操作时,巡查仪都必须处于通电状态,否则操作不成功。
四、操作步骤:1)根据要求的时间段、巡查地点,工作人员沿指定的线路进行巡查,每到一处,在巡查的同时,用巡查仪识读安装在该地点的巡查点。
2)识读时,巡查仪会自动记录当前的地点名称、日期、时间;3)巡查完毕后,把存有采集数据的巡查仪送交管理人员,通过数据电缆与管理电脑连接并将巡查仪中的数据传输到管理电脑中保存,根据工作需要进行查询和生成各种统计管理报表。
torque使用指南
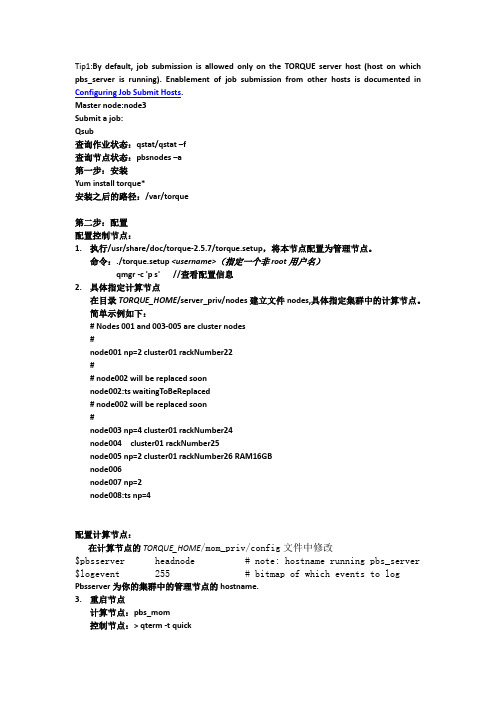
Tip1:By default, job submission is allowed only on the TORQUE server host (host on which pbs_server is running). Enablement of job submission from other hosts is documented in Configuring Job Submit Hosts.Master node:node3Submit a job:Qsub查询作业状态:qstat/qstat –f查询节点状态:pbsnodes –a第一步:安装Yum install torque*安装之后的路径:/var/torque第二步:配置配置控制节点:1.执行/usr/share/doc/torque-2.5.7/torque.setup,将本节点配置为管理节点。
命令:./torque.setup <username>(指定一个非root用户名)qmgr -c 'p s' //查看配置信息2.具体指定计算节点在目录TORQUE_HOME/server_priv/nodes建立文件nodes,具体指定集群中的计算节点。
简单示例如下:# Nodes 001 and 003-005 are cluster nodes#node001 np=2 cluster01 rackNumber22## node002 will be replaced soonnode002:ts waitingToBeReplaced# node002 will be replaced soon#node003 np=4 cluster01 rackNumber24node004 cluster01 rackNumber25node005 np=2 cluster01 rackNumber26 RAM16GBnode006node007 np=2node008:ts np=4配置计算节点:在计算节点的TORQUE_HOME/mom_priv/config文件中修改$pbsserver headnode # note: hostname running pbs_server $logevent 255 # bitmap of which events to log Pbsserver为你的集群中的管理节点的hostname.3.重启节点计算节点:pbs_mom控制节点:> qterm -t quick> pbs_server注意事项:1.在torque中在执行mpi程序时。
智能巡更系统操作手册(电脑端)

中科新智智能巡更巡检系统电脑端操作说明书V1.5烟台中科新智软件技术有限公司目录一、项目建设意义 (4)二、巡检管理系统概述 (5)1、系统设计目的 (5)2、系统设计原则 (6)3、应用技术介绍 (6)4、设计依据 (8)5、系统构成 (9)三、系统组成介绍 (10)1、PDA巡检器 (10)2、感应式巡检点 (13)3、巡检系统软件介绍 (13)3.3.1 软件结构图 (14)3.3.1.1 数据采集层 (14)3.3.1.2数据存储层 (14)3.3.2软件特点 (14)四,操作说明 (15)4.1 系统登录 (15)4.2 主界面说明 (16)4.3 系统管理-系统用户 (16)4.4 系统管理-权限管理 (17)4.5 系统管理-公司部门 (18)4.6 系统管理-员工信息 (19)4.7 巡更基础资料-RFID信息点 (21)4.8 巡更基础资料-巡线信息 (22)4.9 巡更基础资料-巡更计划 (23)4.10 报表查询-巡更扫描记录报表 (24)4.11 报表查询-巡检漏扫比较报表 (26)4.12 报表查询-巡更采集值查询 (27)4.13 报表查询-巡更上传图片查询 (27)4.14 报表查询-地图线路查询 (28)一、项目建设意义随着社会的进步与发展,人民生活水平的日益提高,各行各业对其管理工作的要求越来越规范化、科学化。
对所管辖区域内的重点设备、线路、财产安全的定时定点巡检及突发事件实时上传的要求也越来越高。
安全重在管理,管理重在现场,现场重在落实。
目前各级单位虽然制定了安全制度并加强了日常作业管理,但是仍然无法杜绝漏巡、玩忽职守所造成的损失,如何通过科学有效的技术手段,推进安全科学化管理工作,加强对巡视人员的有效监管,加大巡视检查力度,及时消除安全隐患,有效防止不安全事故的发生,杜绝人的不安全行为,是各级领导所关注和期望的。
利用计算机进行日常管理已经成为各个行业的一项重要手段。
torque中文教程--瞄准器
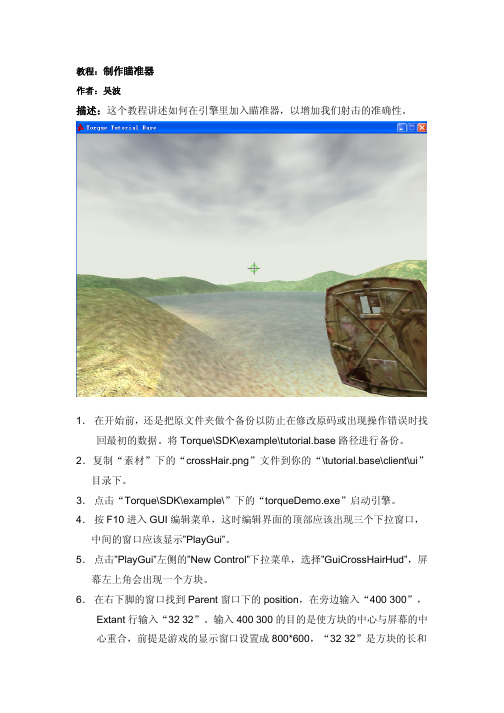
教程:制作瞄准器作者:吴波描述:这个教程讲述如何在引擎里加入瞄准器,以增加我们射击的准确性。
1.在开始前,还是把原文件夹做个备份以防止在修改原码或出现操作错误时找回最初的数据。
将Torque\SDK\example\tutorial.base路径进行备份。
2.复制“素材”下的“crossHair.png”文件到你的“\tutorial.base\client\ui”目录下。
3.点击“Torque\SDK\example\”下的“torqueDemo.exe”启动引擎。
4.按F10进入GUI编辑菜单,这时编辑界面的顶部应该出现三个下拉窗口,中间的窗口应该显示”PlayGui”。
5.点击”PlayGui”左侧的”New Control”下拉菜单,选择”GuiCrossHairHud”,屏幕左上角会出现一个方块。
6.在右下脚的窗口找到Parent窗口下的position,在旁边输入“400 300”,Extant行输入“32 32”。
输入400 300的目的是使方块的中心与屏幕的中心重合,前提是游戏的显示窗口设置成800*600,“32 32”是方块的长和宽,不知道大家注意没有,我们拷贝的“crossHair.png”文件的长宽正是 32*32。
7.拉动窗口的划块,在下面的“Misc”中找到“bitmap”行,点击最右侧的“…”,在“\tutorial.base\client\ui”目录下选择“crossHair.png”文件。
8.点击“Apply”,瞄准器出现了。
按F10进入游戏状态,发射几下看看瞄准器是不是很准确,如果武器的落点有偏差的话,按F10回到编辑状态,记住子弹的落点,把瞄准器的中心与落点重合。
必要忘记点“Apply”来确认。
9.调试好以后,不要忘记存盘,当然是存成Playgui.gui文件。
10.不要忘了!再次启动引擎前,要编辑一下Playgui.gui文件,加入:Nocursor = “1”;以确保进入游戏后,鼠标还能带动视角转动。
智能巡更系统操作手册(PDA) - v2.0
智能巡检巡更管理系统PDA端使用说明书V2.0烟台中科新智软件技术有限公司欢迎您使用中科新智智能巡检管理系统使用巡检器之前,请先仔细阅读全部安全注意事项和说明书,以确保安全和正确使用。
说明书中的说明基于设备的默认设置。
说明书中所用的图像和屏幕截图可能与实际产品不同,以实物为准。
说明书中的内容可能与产品不同,也可能与服务提供商或服务商提供的软件不同。
如有变更,恕不另行通知。
版权版权所有©烟台中科新智软件技术有限公司2015。
保留一切权利。
非经烟台中科新智软件技术有限公司书面同意,任何单位和个人不得擅自摘抄、复制本说明书的部分或全部内容,并不得以任何形式传播。
注意事项请勿使用损坏的电源线、插头或者松动的电源插座。
请勿用湿手接触电源线,或通过拉拽电线的模式拔下充电器。
在可能发生爆炸的环境下始终按照规定、指示和标志进行操作。
避免充电器短路。
禁止拆卸任何部件。
禁止将巡检器用火烘烤。
禁止将巡检器长时间置入水中浸泡或恶意摔砸。
目录系统描述 (7)包装清单 (7)智能巡检管理系统 (8)1启动图标 (8)2登陆系统 (9)3 新增巡更点 (10)4 巡更扫描(在线上传) (16)巡更扫描(离线巡更) (20)售后服务 (25)服务响应时间≤24小时 (26)9.保修条款 (26)参数说明 (28) (29)系统描述中科新智智能巡更巡检管理系统,基于Android 4.x操作平台,配置GSM/WCDMA/3G数据通讯方案,工业级触屏按键操作的物联网智能数据采集器。
外形时尚轻巧,工业级设计,配置3.7寸高分辨率LCD液晶显示屏,功能强大,采用世界领先的GPS全球卫星定位技术和无线射频识别技术。
在GSM 网络平台上,可以实时传送定位数据(经度、纬度、时间)、图片,突发事件等信息。
同时具有语音通话功能,可以及时与管理中心联系。
可广泛适用于石油石化、移动通讯、电力、铁路、热力、水务、公共安全和企事业单位等各行业巡检巡查应用。
GPU集群Torque排队系统使用手册
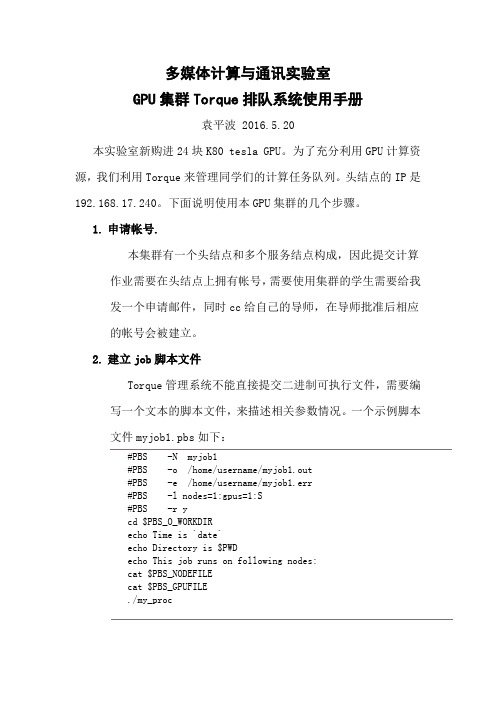
多媒体计算与通讯实验室GPU集群Torque排队系统使用手册袁平波 2016.5.20本实验室新购进24块K80 tesla GPU。
为了充分利用GPU计算资源,我们利用Torque来管理同学们的计算任务队列。
头结点的IP是192.168.17.240。
下面说明使用本GPU集群的几个步骤。
1.申请帐号.本集群有一个头结点和多个服务结点构成,因此提交计算作业需要在头结点上拥有帐号,需要使用集群的学生需要给我发一个申请邮件,同时cc给自己的导师,在导师批准后相应的帐号会被建立。
2.建立job脚本文件Torque管理系统不能直接提交二进制可执行文件,需要编写一个文本的脚本文件,来描述相关参数情况。
一个示例脚本文件myjob1.pbs如下:#PBS -N myjob1#PBS -o /home/username/myjob1.out#PBS -e /home/username/myjob1.err#PBS -l nodes=1:gpus=1:S#PBS -r ycd $PBS_O_WORKDIRecho Time is `date`echo Directory is $PWDecho This job runs on following nodes:cat $PBS_NODEFILEcat $PBS_GPUFILE./my_proc脚本文件中定义的参数默认是以#PBS开头的。
其中:-N 定义的是job名称,可以随意。
-o 定义程序运行的标准输出文件,如程序中printf打印信息,相当于stdout;-e 定义程序运行时的错误输出文件,相当于stderr。
-l 定义了申请的结点数和gpus数量。
nodes=1代表一个结点,一般申请一个结点,除非采用mpi并行作业;gpus=1定义了申请的GPU数量,根据应用实际使用的gpu数量来确定,S表示job类型,后面有详细描述。
队列系统的默认job请求时间是一周,如果运行的job时间估计会超过,则可以使用下面的参数:#PBS -l nodes=1:gpus=1:S,walltime=300:00:00表示请求300小时的job时间。
《第12课 机器人巡逻》作业设计方案-初中信息技术浙教版20九年级全册自编模拟

《机器人巡逻》作业设计方案(第一课时)一、作业目标本次作业旨在帮助学生掌握机器人的基本控制原理,了解机器人巡逻的应用场景,并通过实践操作,掌握机器人巡逻的基本操作方法。
二、作业内容1. 机器人控制原理:学生需要了解并掌握机器人的基本控制原理,包括传感器、程序控制等关键技术。
通过阅读教材、观看教学视频等方式,学生需要能够解释机器人的基本工作原理。
2. 机器人编程:学生需要使用编程软件编写简单的机器人程序,实现巡逻功能。
程序应包括前进、停止、左右移动、检测障碍物等基本操作。
学生需要按照规定的程序编写要求,完成编程任务。
3. 实际操作:学生需要在模拟环境中进行机器人巡逻的实际操作,确保能够正确启动、停止机器人,控制机器人前进、停止、左右移动,检测障碍物等操作。
三、作业要求1. 作业时间:本次作业需要至少两课时完成,第一课时进行理论知识的学习和讨论,第二课时进行实际操作和评价。
2. 作业形式:作业以个人或小组形式完成,建议小组人数不超过3人。
3. 作业内容:学生需按照规定的程序编写要求,独立完成编程任务。
如有实际操作需求,可在小组内协作完成。
4. 注意事项:学生在实际操作过程中,务必确保自身及周边环境的安全。
如发现有安全隐患的操作,应及时向老师报告。
四、作业评价1. 评价方式:本次作业将采用教师评价、小组互评、自我评价相结合的方式进行。
2. 评价标准:根据作业内容,制定详细的评分标准。
评分标准将包括理论知识的掌握程度、程序编写质量、实际操作表现等方面。
3. 评价时间:评价将在完成作业后的一课时内进行,并及时向学生反馈评价结果。
五、作业反馈1. 学生反馈:学生应就作业过程中遇到的问题、收获及改进方向进行反馈。
教师将及时解答学生的疑问,并针对普遍存在的问题进行集中讲解。
2. 教师反馈:教师将根据评分标准对每个学生的作业进行评价,并针对学生的完成情况提出改进意见。
同时,教师也将根据作业完成情况,对教学内容和方法进行反思和调整,以更好地满足学生的学习需求。
区域巡逻智能管理系统教程共35页
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
35
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
2大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
区域巡逻智能管理系统教程
16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更 辉煌。
18、敢于向黑暗宣战的人,心里必须 充满光 明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞的 人只能 引为烧 身,只 有真正 勇敢的 人才能 所向披 靡。
资源管理软件TORQUE 与作业调度软件Maui 的安装、设置及使用
资源管理软件TORQUE与作业调度软件Maui的安装、设置及使用李会民(hmli@)中国科学技术大学网络信息中心2008年1月目录1资源管理软件TORQUE的安装与设置21.1服务节点安装TORQUE (2)1.2服务节点初始化并设置TORQUE (2)1.3计算节点上安装TORQUE (4)1.4计算节点配置TORQUE (4)2安装与配置作业调度软件:Maui52.1服务节点上安装Maui (5)2.2服务节点上配置Maui (5)3作业运行63.1串行作业 (7)3.2并行作业 (8)3.3常用作业管理命令 (8)3.3.1查看队列中的作业状态:qstat (9)3.3.2挂起作业:qhold (10)3.3.3取消挂起:qrls (10)3.3.4终止作业:qdel和canceljob (10)3.3.5查看作业状态:checkjob (11)3.3.6交换两个作业的排队顺序:qorder (12)3.3.7选择符合特定条件的作业的作业号:qselect (12)3.3.8显示队列中作业的信息:showq (13)3.3.9显示节点信息:pbsnodes和qnodes (13)1资源管理软件TORQUE的安装与设置TORQUE和Maui可以从上下载。
以下仅是粗略配置,详细配置请参考相关手册:•TORQUE:/torquedocs21/•Maui:/products/maui/docs/mauiusers.shtml1.1服务节点安装TORQUE这里假设服务节点的机子名为kd50,其中一个计算节点的名字为node0101。
root@kd50#tar zxvf torque-2.2.1.tar.gzroot@kd50#cd torque-2.2.1root@kd50#./configure–prefix=/opt/torque-2.2.1–with-rcp=rcp上面–with-rcp=rcp设置为利用rsh协议在节点间传输文件,也可设置为–with-rcp=scp以利用scp协议进行传输。
机器人巡线教程 PPT

情况1
情况2
程序
采用上述方法时,车子可以简单走一条没有交叉路口的路 线。
但程序中没有直走的情况,车子在循迹过程中抖的比 较厉害。想要车子走的更好,甚至要走交叉路口等情况, 就要对车子进行进一步处理。
处理复杂路况
对于竞赛类的场地,轨迹的图形形式多样化,这样需要 采用多个光电传感器的方式来解决。以三个光电传感器为 例。
走的值为300,设小车每次检测的值为gray,差值 error=gray-300;速度差sp_err=p*error;
PID中的比例控制
其中p为控制小车转动的比例值,p越大,车子转动越灵敏, 实际小车运动的表现中,将会抖动的比较厉害。
循迹小车初级入门教程
要点
循迹基本常识 光电循迹举例
循迹基本常识
循迹的基本过程:通过光电传感器判断出是否遇到黑线, 然后控制马达做出对应的动作。
1、识别黑线 (1)认识光电传感器:光电传感器可以检测其照射到的面 的亮度值。光电照射到白色面时亮度较大,黑色面时亮度 较小。 (2)区分黑白:通过光电检测到的亮度大小便可以区分黑 白。
后面三个或者其他路口都可以以第一个图示的情况来 处理。具体程序处理可查看例子程序。
在实际循迹中,要保ห้องสมุดไป่ตู้车子走的又好又稳定一般方式是通 过增加光电的个数来保证车子的行走质量。
循迹的算法并不单一,下面拓展简述一种较高级的算法, PID的控制方式。
PID中的比例控制
重新认识光电传感器 光电检测的值是一个可变值,离黑线近时值比较小,
三个光电的基本循迹控制方式
三光电循迹的基本处 理如右图所示。
对于复杂图形的循迹, 程序需要分段操作,对 不同的路口进行判断处 理。
三个光电解决复杂路口情况
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
教程: 为机器人设定路径
作者:吴波
描述:这个教程演示如何生成机器人或者AI控制的玩家,使他们可以在任务编辑器中沿着一定的路线活动。
这个功能非常的重要,可以通过这个功能让机器人可以在一定的范围内巡逻或守卫,当发现人类玩家的时候进行攻击。
注意:本教程所用的”bot.cs”文件中的编码是从”starter.fps”示例文件夹”aiPlayer.cs”中节选的,建议你从这个教程开始熟悉机器人(BOT)的一些控制语句。
1.开始之前,还是对"tutorial.base" 目录进行备份, 以防数据出错。
2.从素材路径中复制 "bot.cs" 文件到 "tutorial.base/server" 目录下。
3.打开"tutorial.base/server" 目录下的 "game.cs" 脚本文件并在onServerCreated() function语句下加入:
exec("./bot.cs");
你应该看到几句其他的exec()语句存在于此文件中,把上面的这句放到最后一行就可以了。
除了定义我们的机器人如何沿着给定的路径活动外, "bot.cs"脚本还定义了一个特殊的物体叫做AIManager(AI 管理器),它是用来管理所有的机器人的各种活动的,为了实现这个目的,我们需要在执行onMissionLoaded()(任务开始)和onMissionEnded()(任务结束)功能时,通过增加一些代码来开始和停止它的作用。
填加高亮部分语句到onMissionLoaded() function下:
function onMissionLoaded()
{
// Called by loadMission() once the mission is finished loading.
new ScriptObject(AIManager) {};
MissionCleanup.add(AIManager);
AIManager.think();
}
接下来,我们需要填加以下代码到onMissionEnded()功能下以便在游戏结束时删除AI管理器。
function onMissionEnded()
{
// Called by endMissio n(), right befo re the missio n is destroyed
AIManager.delete();
}
填加好以后,存盘关闭"game.cs" 脚本文件。
4.打开 "bot.cs" 文件仔细阅读所有的语句和功能块,以便你能理解机器人是如果按照任务编辑器中的指定路径活动的。
注意:到此我们还没有在任务编辑器中放置任何的路径,因此AIManager::spawn()功能只能产生一个普通的bot,它不能按照一个路径活动。
稍后,在我们增加并设置了路径后,我们将返回这个功能,来使用我们新设置的路径。
5.运行"example"目录下的"torqueDemo.exe"文件。
引擎报错?!!让我们来看看哪出问题了。
回到"example"目录下,打开"example"下的”console.log”文件,查看最后一行,应该可以看到”Loading compiled script tutorial.base/server/bot.cs.”语句,这说明是"bot.cs"出了问题。
6.再次打开"bot.cs"文件,看下第一行,datablock PlayerData( MyBot : PlayerShape ),发现问题了吗?PlayerShape是我们没有定义过的数据块,把它改成"PlayerBody",存盘。
7.再次执行"example"目录下的"torqueDemo.exe"文件,
8.主菜单出现后,点"开始"(或者"start",这取决于你是否已经汉化了按钮),"F World"任务将被调出。
9.任务开始后,向后移动几步,会看到一个不动的机器人出现了,这是因为我们还没给它设置活动的路径。
10.找到一个相对平坦的地形,这样将比较容易产生一个路径。
按F11进入任务编辑模式,再按F4进入"World Editor Creator"模式。
11.在右侧的编辑窗的下半部中,点击"Mission Object"左侧的"+",再点击"Mission"左侧的"+",实现 "Mission Objects->Mission"的路径展开。
在"Mission"目录下,找到"Path"并点击一次,产生一个新的路径,会调出一个对话框,在对话框"Object Name:"旁键入"myPath"(可键入任何名字,但本教程请按此名字输入,以保证教程能够顺利完成。
)
注意:我们新产生的路径体还没有任何的标记(PathMarkers),因此任务编辑器中不会有任何变化。
12.点击右侧窗口最上面的一行 "MissionGroup"展开树状目录,找到"Path - myPath",可以看到它的前面是一个"∞"符号,按住"Alt"并点击"Path - myPath",可以看到"∞"变成了绿色的文件夹图标,说明"Path - myPath"变成了一个文件夹(这步非常的重要!!),接下来我们要为路径(Path)建立标记点(Pathmarkers)。
13.重复刚才的步骤,在右侧的编辑窗的下半部中,点击"Mission Object"左侧
的"+",再点击"Mission"左侧的"+",实现 "Mission Objects->Mission"的路径展开。
在"Mission"目录下,找到"Pathmarker"并点击一次,产生一个新的标记点,会出现一个对话框,是否起名字都没有关系,点"OK"就可以了。
转动一下视角,再产生两至三个标记,使路径变成一个闭合的环。
调整一下标记点的位置,使相互之间的距离足够远,并位于地面之上。
确认一下所有的"Marker"都在"Path - myPath"下。
14.到此,我们就有了一个新的路径,保存任务并退出引擎。
15.现在我们再次进入"tutorial.base/server"目录下,打开"bot.cs"脚本文件。
找到AIManager::spawn()功能块,去掉屏蔽掉的关于"Bot_2"的语句:%bot = AIPlayer::spawnOnPath( "Bot_2", "MissionGroup/myPath" );
%bot.followPath( "MissionGroup/myPath", -1 );
做完以上步骤后,存盘。
16.再次运行引擎,看看你的任务中是不是有两个机器人了,一个站在原地,一个在沿着刚才设定好的路径快速的跑动。
17.好了,这个教程到此结束了。