DCS在压缩机防喘振控制系统中的应用
浅谈DCS控制系统在化工压缩机中的应用
浅谈DCS控制系统在化工压缩机中的应用摘要:dcs系统在压缩机装置的应用,包括dcs系统特点,自控改造方案,设备仪表选型,报警措施等。
关键词: DCS控制系统压缩机应用一、概述压缩机在化工系统生产中提供稳定气处理的重要设备, 该装置工艺流程复杂,生产过程易燃易爆,同时对生产参数的控制要求严格。
化工中大都利用压缩机作为原料气的装置。
目前压缩机控制主要使用的现场继电器控制柜,虽然所用仪表是电-Ⅲ型仪表,电源由220V AC转换为24V DC供电或者是220V AC,防爆等级低,无数据远传功能;大多数仪表主要是显示不参与参数调节靠人为手动,或者靠简单的仪表进行监测;仪表的故障率较高,控制效率低;生产出现故障时,也不容易查找事故原因,造成了生产、安全等诸多不稳定的因素;同时又不能对生产参数的历史数据进行储存,不便于生产管理,严重限制了压缩机装置自动化技术的进一步提高,成了阻碍该装置自动化改造的瓶颈.为了克服以上毛病,提高压缩机自动运行的能力,达到提前预警的目的,同时确保原油的产量和质量,提高原油的外输率,应用dcs作为新的控制系统对该装置进行改造势在必行。
二、DCS控制系统功能DCS控制系统包括现场控制站、工程师站、操作员站。
系统采用冗余配置,Windows NT操作平台,可靠性强,同时具备良好的开放性和扩展性,便于与其它系统相互通信和系统扩展,同时具有以下功能:(1)显示功能。
按流程画面分组动态显示全站各工段工艺流程和参数。
系统所有人机界面采用中文显示,在线完成无扰切换。
系统可提供标准的静态和动态人机界面显示,画面在屏幕上可动态缩放、画面之间的切换等人机对话功能,方便操作。
(2)控制功能。
对系统中的重要工艺参数进行调节和控制。
系统控制以现场控制单元为中心,实现回路的连续控制,以及顺控和联锁保护、报警功能,并且可进行手操、单回路、串级、比值、前馈和PID等多种常规控制。
控制操作(数字或模拟回路)可通过操作编组画面或动态画面显示。
制氧机空气压缩机组的DCS自控及改进

1引 言 下条 件 , 首先 入 口导 叶应 处在 预备 起动 状态 , 其次 , 防喘振 阀需 彻底 打 空气 压缩机有 非常广 的应用层 面 , 例如 在炼钢 、 炼铁 、 供 水等行 业 , 开, 电控单 元无异 常 , 最后 油温 、 油压 、 冷 却水流量 均需 满足起 动要 求数 作为这些 行业不 可缺少 的氧气供 给来源 , 其 应用量 非常 大。但是 , 低效 值 。此 时 , 在正 常 隋况下机 旁柜 中应 显示起 动信号灯 亮 , 可 以起动 电动 率和高 故障率 的传统空气 压缩机 组并不 能满足 钢铁等行 业迅猛 发展 的 机 , 测振仪 报警 将增至 3 0 s 左右 , 若振动值 成倍增趋势 , 且 空气压缩 机在 要求 。近些年 来 , 随着分布 式控制系统 的发展 , 使得 用 D C S 对空 气压缩 倍增报 警时 间里还处在 联锁停 车状态 , 那么 3 0 s 过后 , 系统将 自 动 解 除 机组进行 控制成为 了可能 , 使用 D C S 对其 进行控制 的普 及 , 起到 了对空 倍增 报 警 。空气 压缩 机 处于 同步 运转 时 ,其 自动 加载 伴 随防 喘振 阀 气压缩 机组 的改造和 完善 的作 用 , 有效 的提升 了空压机 的 自动 化水平 , S v l 0 0 1 的得 电而 动作 。 配合更 为先进 调节器 和传感器 , 还可 以对 控制 回路进行 简化 , 可 以轻松 起 动空压机之 前应将油 箱加热器 、辅油泵 转换开关 等调 至 自动位 实现执彳 亍 逻辑功能 , 提 高了 回路调节 的能力 。 应用 D C S自 控 系统进行控 置 。当管道 油压无异 常时 , D C S 将自 动停 止或起 动油箱加 热器 , 以达 到 制, 除了具有 很好 的控 制效 果外 , 还具 有较 强的抗 干扰 能力 , 对工 作环 调节的作用。当电动机和空压机同步后, 齿轮泵动作, 油压经 D C S 判断 境要 求不 高 , 大大 提升 了空 压机组 运行 的安全 稳定性 , 此外 , 其 经济效 后 , 如若 正常 , 操作人 员方 可停止辅助油 泵。若供油 总管压力过低 , 小 于 益也 非常显著 。 要求 值 O . 1 2 MP a 或停车时 , D C S 会再 次起 动辅助油泵 。 2自 控 内容和原理 2 . 4 . 2空气压缩 机停车逻辑 2 . 1 基 本控制 当发生诸如 空气压 缩机 的轴振 动强烈 、轴位移 过大 、轴 承温度 过 根据空气分压 工艺 的特点要求 ,对空压 机机组 的控制 可采用恒 压 高 、 导叶开度 过小 以及 电动机 轴承温度 异常等情 况时 , 空 气压缩 机应 立 控 制方式 。此外 , 为 了提升空 气压缩机 在运行 时的稳定 性 , 还考 虑加设 即停 车 。 这里 所说 的停 车指将拖动空气 压缩机 的电动机停止转动 , 将 防 防喘振控制 、 事故联 锁停车控制 等安全 保护 控制 。 喘振 阀打开到最 大程度 、 关 闭入 口导叶 ,并起 动辅助油 泵等一 系列 动 2 . 2恒压控制 作。空气压 缩机停车操作 顺序应是先 使空压机轻载 , 再按 动空压机 气路 作为空气 压缩机 常用的一种 控制方法 ,恒压 控制能在 机组容量 改 图上停车按钮 。 变时, 保证 压缩空气 以接 近 叵定压力 输 出。利用恒压 控制空 气压缩 机 , 2 . 4 - 3空压 机的起动 、 恢 复加 载 其 转速在 拖动 电动 机是不 变的 ,主要是通 过控制入 口导 叶的开度来 实 空压机 的起动 有两种方 式 , 一种是 电控柜 中起 动 , 另一 种是 中控室 现的 , 而调 节导 叶则需 要用 到恒压控 制器 , 它 的作用是 在空气 压缩机 的 起动 。值得 注意的是 , 对于后 种方式 , 应该将旋 钮转至“ 自动 ” 起动档位 。 出 口处对 空气压力 进行采 集 , 将采集 到 的数 据作为输 入量 , 再 比较所 设 图1 所 示为人 口导 叶控 制示意 图 , 当电动机 处于加 载状态 时 , 入口 定值 , 最后 利用 P I D调 节器将 输入量 进行调节 , 得 到 的输 出量用来对 入 导叶将 打开至最 小开度 ( 全开度 的 1 O %) , 若在 2 0 s 内, 人 口导 叶 的开度 口导叶 的开度进行调控 。 反馈仍未超过 7 %, 那么空压机便会起动联锁停车动作。若超过 7 %, 那 2 - 3安全保 护控制 么导 叶受爬 坡器控 制 , 其 开度 将逐 渐增 大 , 当增 至最 大开 度 时 , 放 空 电 2 . 3 . I防喘振保护控 制 磁 阀将得 电动作 , 放 空 阀又在爬 坡 器 的控制 下 , 由最 大开 度逐 渐关 闭 。 空气压缩机喘振现象主要包括 : 空气压缩机的动力来源 , 即电动机 如若排气压力接近设定值时, 恒压控制器将 自动起动, 自动控制人 口导 的 电流 表和功 率表有较 大 的波 动量 ; 空气 压缩机 剧烈振动 , 出 口压 力升 叶 ; 当入 口差压很 小而未 能对喘振 造成影 响时 , 防喘振 控制器 便 以串级 高后迅 速下 降 , 气 流伴有 较 大的 噪声 , 且 其 流量大 幅下 降 , 甚 至有 吸气 形式投 入 , 能够 自动控制放 空 阀 V1 0 0 6 。操作人 员通过对压力设 定值 的 管道空气 倒流现象 。 更改 , 能够使空压 机 以额定 压力运 行 。此外 , D C S 控制 中还加 设 了防超 发生 喘振 的原 因与叶 片周 围气体 流量有 关。 当叶道 气体 流量过小 压控 制器 P I C A1 0 0 6和电动机 限流控制 器 I I C A 2 3 0 1 ,在排 气压力 数值 时, 叶 片的物理构 造和气 流发生 冲突 , 致使 叶片 凸面的气流 发生脱 离正 或 电动机 电流值 在设 定值 以上 时 , P I C A1 0 0 6 动作使 放空 阀打开 ,入 口 常流通 轨道 , 造成 气体滞 流 , 压缩机 内部压力 下降 , 引起气 流倒 吸 , 产生 导 叶开 度将变小 , 达到卸压 或降低负 载的 目的 。 振动 , 即喘振 。而 空气压 缩机在运行 过程 中 , 引起 叶片周 围气体 流量异 当空 压机 的排气压力 过高 、 发生 喘振或者 预冷 系统故 障时 , 空压机 常 的因素主要 包括 以下几方 面 :①压缩 机的 流道堵塞 ,例如冷却 器结 将会 发生轻 载。此时 , 放 空阀将会 全部打 开 , 并且入 口导 叶限位也 将 降 垢、 过滤器堵塞。②压缩机空气分压系统故障, 例如换热器阀门无法打 至 O %, 在 消除故 障后 , 操 作 人员便 可利 用 “ 恢 复加 载 ” 按 钮来 对空 压机 开 。③放 空阀 出现故 障 , 其 在需要打 开时不能及 时动作 。 进行 自动恢复 。 防喘振 系统对 于提升空气 压缩机 的安全 有很 大帮助 。为了抑制 3改进方法 喘振 , 需 要对空气 压缩机 的 出 口压力 和流量进行 调控 , 其 中通过 对入 口 为使 设备运 转正常 , 在 勘查并分 析放空 阀的定位 器故 障之 后 , 发 现 阀和放空 阀的开度进 行调节是 较为有 效的一 种方式 。防喘振贯 穿空气 故 障起 因在 于放空 阀振动 幅度 过大 , 长 时间振荡必 然损坏 定位器 , 使 其 压缩 机机组 的工作过 程 , 当压缩 机 出现 喘振 晴况 时 , 系统 自动打 开放空 工作 产生异常 。 在 系统全 面调研 定位器产 品后 , 发现 山武分离 型智能定 阀以降低出 口压力 。 位器 A V P 2 0 0 在 防振方 面性能优 良, 用其作 为替代 产 品 , 使 用效果 非 常 2 . 3 . 2电动机过 载保护 好, 但 是空气压 缩机 的原装定位 器 由于其 传动方式 的 限制 , 使得不 能 直 设 置此保护控 制的 目的是 防止 电动机 过载 ,电动机过载 保护调节 接 替换分离 型智能定 位器 , 需对 传动方 式进行更 改 , 即需对 安装 支架进 器 在流经 电动机 的电流大 于额 定值 时动作 , 并 和 出口压力调节 器相 叠 行再 设计 , 方可满足工 艺要求 。 加 共同作用 对空气 压缩机 的入 口阀开度进行 调节 ,以达到保 护电机 的 4结束 语 作用 。 目前 ,多数空 压机组在 控制方 面仍采用传 统 的过 程控制 方式对 各 2 . 3 . 3 出口压 力过高保护控 制 个 锅炉控 制 回路进行 控制 , 这种 方式 不但 可靠性 差 、 效 率低 下 , 而且 耗 空气压缩机 在恒压控 制下 , 若 调节其 入 口阀开 度仍无法 令 出 口压 能严重 。相 比之 下 , 采用 D C S 对空压机 组进 行控制 , 在 很大程 度上减 少 力 保持 在设计 值 附近 , 此时, 出 口压 了设备 的维 护成本 , 提高 了系统 工作 效率 ��
DCS系统在空分压缩机的防喘振控制系统中的应用
DCS系统在空分压缩机的防喘振控制系统中的应用西林钢铁公司6000m3/h空分设备由杭州制氧机集团公司2001年5月成套,工厂设计由北京钢铁设计总院设计,于2001年9月2日顺利投产出氧,历时半年多的时间运行表明,该机组稳定运行,各项指标均达到设计值或超过设计值。
整个控制系统采用美国霍尼韦尔的TDC3000和两台GUS站构成。
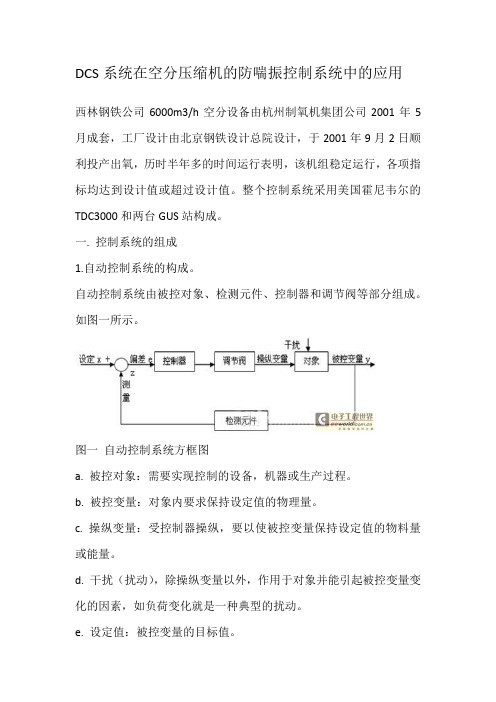
一. 控制系统的组成1.自动控制系统的构成。
自动控制系统由被控对象、检测元件、控制器和调节阀等部分组成。
如图一所示。
图一自动控制系统方框图a. 被控对象:需要实现控制的设备,机器或生产过程。
b. 被控变量:对象内要求保持设定值的物理量。
c. 操纵变量:受控制器操纵,要以使被控变量保持设定值的物料量或能量。
d. 干扰(扰动),除操纵变量以外,作用于对象并能引起被控变量变化的因素,如负荷变化就是一种典型的扰动。
e. 设定值:被控变量的目标值。
f. 偏差:偏差理论上应该是被控变量的设定值与实际值之差。
2.串级调节系统串级调节系统是最早、效果最好、使用最广泛的一种复杂控制系统,它的特点是两个控制器相串接,主控制器的输出作为副控制器的设定,适用于时间常数及纯滞后较大的被控制对象。
二.逻辑点功能逻辑点提供了逻辑能力,它与数字组合点配合,提供了组合逻辑功能逻辑点由逻辑块、FLAG、数字、输入连接和输出连接等组成。
逻辑点最多有12个输入,16个逻辑块,12个输出连接。
三、空分离心式压缩机的防喘振控制空分选用的是离心式压缩机,离心压缩机工作效率高,在正常工况条件下运行平稳,压缩气流无脉动,对其所输送介质的压力、流量、温度变化的敏感性相对较大,容易发生喘振。
发生喘振时流量大幅波动,机组剧烈振动,如不及时采取措施加以控制,会使压缩机转子和静子经受交变应力作用而断裂;使极间压力失常而引起强烈振动,导致密封及推力轴承损坏;使运动元件和静止元件相碰,造成严重事故。
所以应尽力防止压缩机进入喘振工况。
喘振现象是完全可以得到有效控制的,如图二所示,根据离心压缩机在不同工况条件下的性能曲线,只要我们把压缩机的最小流量控制在工作区(控制线内),压缩机即可正常工作。
DCS与压缩机PLC对防喘振的结合应用

DCS与压缩机PLC对防喘振的结合应用一、方案概述在化工行业中压缩机是被广泛应用的一种机械设备,在其使用过程中有一种容易发生并且对设备损伤比较大的现象——喘振。
所以一台压缩机的喘振系统控制的好坏就是一个重要指标。
将DCS与压缩机PLC结合来监视调节来防止喘振的产生。
二、方案设计目的在日常的生产过程中大部分大型的动设备都是在现场启动,所以其控制系统PLC也在现场进行操作,但是在后期的应用中,对防喘振曲线的观察只能靠工作人在现场的巡检过程中,这样一旦工艺状况有变化引起防喘振的变化就不能及时的发现与处理,为了能更好地对压缩机的喘振进行及时的观察与控制,需要将防喘振曲线画面引进控制室。
如果直接增加一个显示器、一根通讯线和一个双头显卡也可以其引导中控,但是这样既增加了生产所需设备又需要有专门工作人员来监视。
若可以将防喘振曲线图在DCS中实现,这样只需要在DCS的流程图多增加一张流程图即可,既省了生产设备又节省了人力劳动。
三、实现在DCS中显示的方案首先在防喘振曲线中需要的两个重要参数是压缩机控制体积流量和压比,横坐标——流量,纵坐标——压比。
这两个参数可以通过PLC与DCS的通讯得到,也可以直接将压缩机的流量和进出口压力采集在DCS中,用计算模块算出即可,其次是喘振与防喘振的两条曲线,这两条曲线是压缩机在出厂前经过试验的出来的,在坐标中是两条固定的曲线,只要用厂家提供的的几个坐标点即可将其画出,这样动态的坐标点与固定的曲线都实现。
四、实现步骤(以YOKOGAWA CS3000和德兰赛兰的压缩机(C-301)为例)1.建立动态点所需数据:一、二段压比和流量1.1 C-301一段、二段压缩比利用已有的一段入口和出口的压力PI-31501、PI-31509,定义一个计算模块C-301-1-P为一段压比,方法如下:在function block中找到PI-31501和PI-31509的PVI模块,分别将其作为C-301-1-P的两个输入值进行连接,第一个PI-31509为IN,第二个PI-31501为Q01,然后在C-301-1-P的Edit Detail中写入计算程序:CPV=(RV+101)/(RV1+101),一段压比C-301-1-P模块已建立。
基于DCS的进口轴流压缩机控制系统
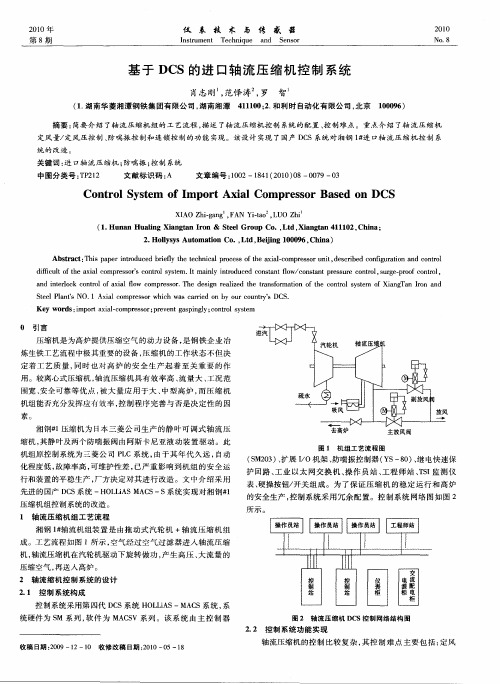
2 Ho yy tmainC . Ld, e ig1 0 9 , hn ) . f ss l Auo t o , t B in O o 6 C a o j i
Ab t a t T i p p r ito u e r f h e h ia r c s ft e a ilc mp e s ru i, e c i e o f u ain a d c n r l sr c : h s a e n r d c d b i l t e tc n c lp o e so xa — o r s o n t d s r d c n g r t n o t ey h b i o o
统 的改 造 。
关 键 词 : 口轴 流 压 缩机 ; 进 防喘 振 ; 制 系 统 控 中 图分 类 号 :P 1 T22 文献标识码 : A 文 章 编 号 :0 2—14 ( 00 0 0 7 0 10 8 1 2 1 ) 8— 0 9— 3
空分空压压缩机防喘振控制系统
空分空压压缩机防喘振控制系统作者:晁龙来源:《中国化工贸易·下旬刊》2020年第05期摘要:空分压缩机的防喘振控制逻辑运用就是控制系统和逻辑点之间相互合作应用。
空分压缩机防喘振体系,是靠Honey11TPS系统DCS本身领先的智能控制方法,还有多重剩余和容错方式来完成的。
单体设施包括空压机、中压压缩机、膨胀透平机、氮压机四种设施。
由增压压缩机与膨胀机两部分组成,它是由美国ACD公司产的新的压缩设备,主要用处是将增压压缩后的空气经过膨胀,消减能量使空气降温。
本文主要讲述膨胀透平机系统的核心控制--防喘振控制。
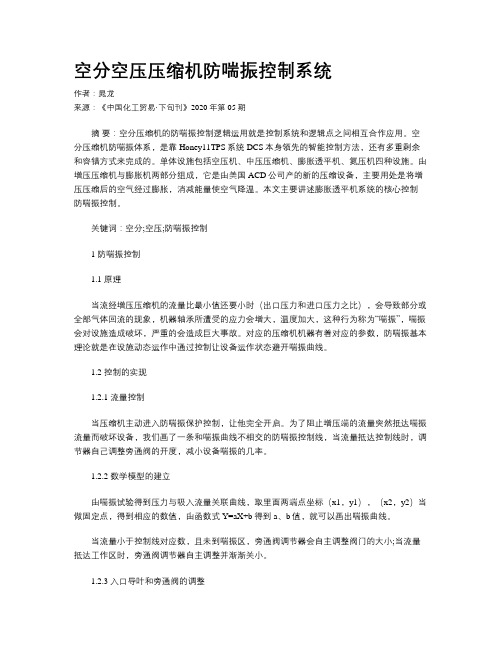
关键词:空分;空压;防喘振控制1 防喘振控制1.1 原理当流经增压压缩机的流量比最小值还要小时(出口压力和进口压力之比),会导致部分或全部气体回流的现象,机器轴承所遭受的应力会增大,温度加大,这种行为称为“喘振”,喘振会对设施造成破坏,严重的会造成巨大事故。
对应的压缩机机器有着对应的参数,防喘振基本理论就是在设施动态运作中通过控制让设备运作状态避开喘振曲线。
1.2 控制的实现1.2.1 流量控制当压缩机主动进入防喘振保护控制,让他完全开启。
为了阻止增压端的流量突然抵达喘振流量而破坏设备,我们画了一条和喘振曲线不相交的防喘振控制线,当流量抵达控制线时,调节器自己调整旁通阀的开度,减小设备喘振的几率。
1.2.2 数学模型的建立由喘振试验得到压力与吸入流量关联曲线,取里面两端点坐标(x1,y1),(x2,y2)当做固定点,得到相应的数值,由函数式Y=aX+b得到a、b值,就可以画出喘振曲线。
当流量小于控制线对应数,且未到喘振区,旁通阀调节器会自主调整阀门的大小;当流量抵达工作区时,旁通阀调节器自主调整并渐渐关小。
1.2.3 入口导叶和旁通阀的调整经由串级回路完成手/自动调节,并实施了阀位定位。
膨胀透平系统的防喘振就是经由控制入口导叶大小、旁通阀开度,从而调整压缩机的进口流量同压比来完成的。
用DCS替代KAM实现氨压缩机防喘振控制
[收稿日期]2013-10-22[作者简介]兰杰(1967—),男,四川泸州人,工程师。
用DCS 替代KAM 实现氨压缩机防喘振控制兰杰(四川泸天化股份公司,四川泸州646300)[摘要]由于核心PID 模块和面板操作用法的不同,导致传统控制器和DCS 用于复杂控制系统组态的差异,本文详细介绍了用DCS 替代KAM 实现防喘振控制以及完善其控制功能的组态方法。
[关键词]DCS ;KAM ;PID 模块;防喘振;选择控制[中图分类号]TP 273[文献标志码]B[文章编号]1004-9932(2014)03-0045-05Ammonia Compressor Anti-surge Control by DCS in Lieu of KAMLAN Jie(Sichuan Lutianhua Co .,Ltd ,Luzhou 646300,China )Abstract :The difference between the operation of core PID module and panel leads to the difference in confi-guration between the conventional controller and DCS used in the intricate control system.This paper details the configuration method of DCS in lieu of KAM to achieve anti-surge control and improve its control function.Key Words :DCS ;KAM ;PID module ;anti-surge ;selective control泸天化硝酸装置的C101氨压缩机的六回一防喘振控制通过随机控制柜里的KAM 实现。
该KAM 是原KMM 的升级产品,运算模块和运算单元进一步扩大,并扩展了某些功能,但是仍采用0 3型的4种PID 控制类型。
运用DCS改进PLC防喘振控制的方案
况出发,在不影响压缩机原有特性的情况下,针对防喘振控制提出了一种用 <4, 加强 634 控制的改进方案。 关键词: <4, ; 634 ;防喘振;控制方案 中图分类号: 5*-" 文献标识码: A
1231, 45675 离心式空气压缩机作为环己烷
氧化装置中的关键设备,在生产中具有特别重要的 作用。原有的 634 控 制 方 案 在 装 置 扩 容 后 暴 露 出 一些不足,因此,有必要设计出一种安全可靠、经 济实用的改进方案。 该 压 缩 机 控 制 系 统 有 出 口 压 力 控 制 634 和 防 喘振控制 634,通过调节入口导叶和放空阀(防喘 振阀)控制出口压力,并通过防喘振阀的迅速开启 达到防喘振的目的。 出口压力采用分程调节,意在使压缩机出口压 力保持在 (#*’68,调节器输出信号的 !9-!: 使 放 空阀关闭, -!:9(!!: 使入口导叶打开。防喘振调 节实际上是流量 ; 压差比值调节, 634 的输出信号 由压力控制和防喘振控制两个输出信号的低值决 定,即哪个信号可使放空阀 (气闭式)开度更大, 哪个信号就起作用。因此,出口流量不太小,进出 口压差不过大时,均为压力控制;只有在异常情况
<4, 的防喘振控制回路投用或切除。
收稿日期: %!!"+(!+!)
0 年多 # 发表论文一篇 #
&’
!"#$% &’%$( )$*#$))+#$*
电子计算机应用研究中心 # 刘稚钧等 # 机械设备综合诊断技术 $’&#())"#(%# $%&佟德纯,
下,防喘振阀才迅速开启放空。 随着生产负荷的不断提高,防喘振控制所留的 安全裕量越来越小。转速不变的情况下压缩机出口 流量越小,发生喘振的危险性越大。最保守的方案 是控制固定极限流量,使压缩机的流量始终大于某 一定值流量,压力自然就达不到喘振的程度。但这 不可避免地会造成放空,能耗增大,不利于高负荷 生产。现在的控制方案是通过放空量的变化调节出 口流量使进出口压力比不至高过控制线,问题在于 控制线与喘振线之间相隔多大为好。相隔过远虽安 全, 但动作太早, 浪费能源,不利于高负荷生产; 相 隔太近, 调节动作赶不上压力变化, 防喘振失败。 实际上,正常情况下的防喘振控制基本能满足 要求,只是在发生突然变化时反应不及。因此,可 以增加一套 <4, 监测系统,以完善 特 殊 情 况 下 的 防喘振任务。 具体做法是用压缩机的出口流量和出口压力控 制一台快速切断阀。通过 <4, 组态 做 两 个 内 部 开 关 : =>,3-")( 和 6>,?-"0( , 分 别 限 制 流 量 和 压 力,开关的具体启动值按经验估算, (!@ 内当流量 变化超过 "!: 或压力变化大于 !#-’68 时,应打开 快速切断阀,使出口流量迅速增大,远离喘振区。 组态时尚需考虑试车、开车、调整过程中的特 殊情况,可另外再设置一个选择开关,以便随时将
国产DCS中富气压缩机防喘振控制方案的实施

P — — 出 口压 力 , a MP ; P — — 人 口压 力 , a MP 。
出 口压力 , 使之在正 常的工作 区内运行 。 。
基 于此 原 理 , 缩机 喘振线 计 算方 法通 常 有 压
两 种 : 种 是 以 压 缩 机 出 口 与 人 口压 力 之 比 , 一 即
中 图 分 类号
T27 P7
文献 标 识 码 B
文 章 编 号 10 — 3 ( 0 1 0 — 2 -3 0 03 2 2 1 ) 50 40 9 6
压 缩 机大 多应 用 于石 化 、 冶金 以及 煤化 工 等 工业 领域 中 , 控 制 器 要 求 安 全 性 高 、 应 速 度 其 反 快, 目前大 型化 工行 业项 目所 涉及 的压缩 机 防 喘 振控 制 , 大都是 由厂 家 配套 的 防喘振 控 制器来 实
根 据 压 缩机 的运行 特 点 , 设计 了 防喘振 控 制 专用 界面 ( 4 , 该 界 而 上 可 以体 现 所 有 与 防 图 )在
喘 振 控 制 相 关 的 参 数 , 可 以 在 该 界 面 上 完 成 各 也
若采用压 比P/ C× ̄ / d 和 p / p作喘振曲线 ,
其 基 本 形 状 为 抛 物 线 ; 采 用 p/ 。和 ( 若 p Cx
/ 作 图 时 得 到 的 喘振 线 则 基 本 呈 直 线 形 p)
状 。
其中
C—— 常数 ( 由孔板 尺寸决定 ) m ; , h—— 孔板 差压 ( 流量 的关 系 式 为 Q = 与
甲醇 项 目 中所 使 用 的 极 具 代 表 性 的 富 气 压 缩 机 为
气压缩 机 防喘振 的 控制 要求 和 技 术特 点 , 浙江 中 控集 团专 门研 究 了压 缩 机 防 喘 振 控制 在 D S上 C 实现 的可行性 方 案 , 开发 了相 应 的防 喘振 控制 模 块, 该控 制方案 可 以实 现对压缩 机 的防喘振控 制 , 首次在某 化工 厂 2 0 t 0 k 甲醇项 目中成 功运 用并 达 到 了 良好 的控制 效果 。
浅析TRIDENT防喘振控制系统在离心压缩机中的应用

工艺 设备 《
Ch i n a Ch e mi c a l T r a d e
中国化工 贸易
_g 第 4凝
2 0 1 3年 4 A
浅析 T R I D E N T防喘振 控 制 系统在 离心压 缩机 中的应 用
姚 龙
7 1 9 3 1 9 ) ( 陕 西 煤 业 化 工 集 团神 木 天 元 化 工 有 限 公 司 ,陕 西 榆 林 摘
要 :本 文 介 绍 了 TRI C ONE X 公司 T RI DE NT 系统 的在 离心 压 缩机 控 制 中如何 实现 防喘 振控 制 。
( 图 3 设 定点浮动线 )
四、T RI DE NT喘 振 控 制 器 特 - 陛
因为 喘振发 生得 很快 ,必 须使 用特殊 的控制 技术 来保证 防 喘阀及
七 、适 应 ・ 陛增 益 和 非 对 称 响 应 喘振 控制 器提供 了 一种适 应性 增益特 性 。当工 作点 在喘振 控制 线
般情 况 下 ,压 缩 机不 会在 喘振 线上 持续 运 行或 过 长时 间运 行 。 当工 作点在控 制线右方 ( 安全 区域 ) ,喘振 控制器 的设定点 ( 线)须 在 当前 h值 的某一可 设百分 比范 围 内以可 设值移 动 。当工作 点越 过设 置
一
点 ( 浮动线) 如图 3 ,以小幅快速 向喘振线 窜动时 , 将 发生如 下情形 : l防喘 阀迅速打开 2 . 设定 点浮动线将 以可设值 移动直至 防喘阀全关 3 . 新工作 点建立 如 果设 定点 浮动线 与喘 振控制 线重 合 ,系统将 保持 回流 以保证 在 喘振 控制 线上运 行 ,此 特性 并非在 所有 条件 下应 用 .在 应 用前 亦需 作
防喘振控制技术在小型离心压缩机上的应用实践研究

机械与设备2017年5期︱317︱防喘振控制技术在小型离心压缩机上的应用实践研究肖东升昆明冶研新材料股份有限公司(曲靖生产区),云南 曲靖 655000摘要:经济飞速发展下,带动机械技术的突飞猛进,在实践工作使用的机器设备上的小型离心压缩机是机械科技研究的重要内容,研究这内容可以为小型离心压缩机的在使用过程中可以更顺畅带来技术上的支持,本文就主要分析了防喘控制技术在小型离心压缩机上的实践工作,本文分析的防喘控制技术是新研究出的控制系统,对实践中用这一系统对小型离心式压缩机进行技术上的改造,分析整个个改造的过程,检验改造结果。
关键词:防喘振控制技术;小型离心压缩机;应用中图分类号:V233.95 文献标识码:B 文章编号:1006-8465(2017)05-0317-02工程机械技术的发展下,带动了各种机械技术的进步。
现今的,一种应用在小型离心压缩机上的控制系统,对推动机械技术进步有着一定的意义,防喘振控制技术在小型离心压缩机上的应用实践工作中,氮气型压缩机工作组在正常的生产阶段,入口中的导流叶片还有防喘控制阀的阀门自始至终都是自动进行控制的方式,这样就有了两方面的优点,保证了机组工作的安全运行,在调节品质方面对生产工艺进行了提高,免于放空形成的浪费。
1 实践应用分析 对一些氮气压缩机进行研究分析,压缩机设备在氮气压缩机运行中的配套系统是比较传统的控制系统,这种控制系统在保证压缩机安全的运行上主要应用的又是入口倒流叶片进行手动的控制和放空阀来进行的手动控制方式。
在避免工作机组出现喘振问题上,要放空阀维持在百分之三十上下度的开度,要维持这一状态主要缘由就是这种控制系统缺少对防喘振这一功能的专门控制工作和算法。
没有进行这种装置的配备就是因为这种控制技术一般都是掌握在国外的机械制造公司的,想要进行引进就必须花费大量的资金。
(1)离心式氮气压缩机在工作过程中的不足之处 第一点就是应用进口生产的导叶阀的手动进行控制,在确保后续工艺压力上是难以得到稳定的。
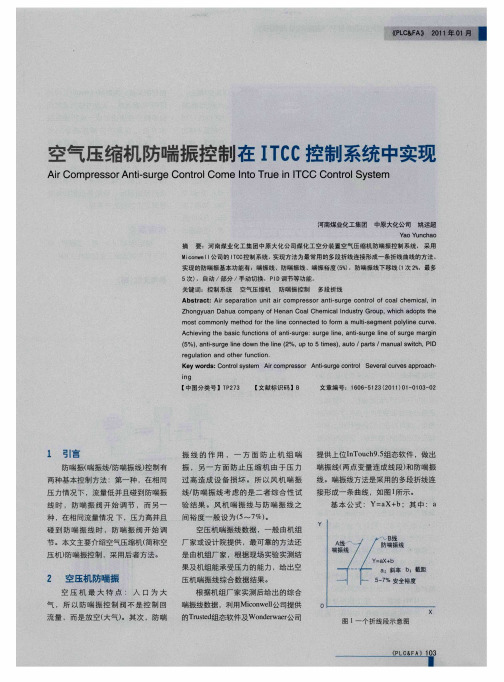
空气压缩机防喘振控制在ITCC控制系统中实现
(%) a ts reled wntele(%, pt i s, uo/ at 5 , ni ug n o h n 2 u o5t - i i me )a t p r s/ma u l wih P D n a s t , I c
r ul i n t e un t eg at on a d o h r f c i on. Ke y wor s: n r l y t m Ai c d Co to s e s r omp es or Ani Ugec nr l Se ea uv sa pra h r s tS r o to - v rl re p o c - c i ng
实现 的防 喘振 基本功 能有 :喘振 线 、防 喘振 线 、喘振 裕度 (% .防喘振 线下 移线 (次 2 ,最 多 5) 1 % 5 , 自动 /部 分 /手动 切换 .P 调 节等 功能 次) l D 关键 词 :控 制系统 空气 压 缩机 防喘 振控 制 多段 折线
Abst a t r c :Ai s ar to u t ai c r ep a i n ni ompr s or a is on r fco emi a ,i r s nt ur c tolo al e — ge ch cl n Zho g a hu o n yu n Da a c mpa y o n al emial n u ty G r p, n fHe an Co Ch c d s r ou whih ad p s t e I c o t h
;南煤 业化 工集 团 中原 大化 公司 姚 运超 - . f
Y oY c o a un ha
摘 要 :河 南煤 业 化工 集 团中原 大 化公 司煤 化 工空 分装 置空 气压 缩机 防 喘振 控制 系统 , 采 用
大型透平式压缩机防喘振控制及应用
大型透平式压缩机防喘振控制及应用大型透平式压缩机是石油、化工、电力、航空航天等行业的重要设备,广泛应用于蒸汽喷气发动机、气轮机、涡轮增压器、天然气压缩与输送等场合。
在大型透平式压缩机运行过程中,容易出现喘振现象,严重影响设备的稳定性和安全性,甚至导致设备的损坏和停机维修。
因此,如何防止和控制大型透平式压缩机喘振问题是一个重要的研究方向。
喘振是指透平式压缩机在一定工况下,出现压气机叶轮或转子不规则摇晃或振动,导致机组振动、噪音和危险,进而影响设备的正常运行。
喘振的产生与压气机自身的刚度、频率、阻尼特性等参数密切相关,此外,气体压力、流量、温度等外部因素也会影响喘振的发生。
在大型透平式压缩机的操作实践中,喘振问题需要通过系统性的防控措施来解决,包括结构改进、控制方法设计、实验研究等。
针对大型透平式压缩机喘振问题的防控措施可以分为结构改进和控制方法两个方面。
结构改进方面,可以从提高压气机的刚度、降低自然频率和增加阻尼等方面入手,使压气机防止高频振动和喘振。
控制方法方面,则通过控制压气机的转速、调节导叶、调整进口流量等方法,来防止或控制喘振现象的发生。
近年来,随着计算机技术和控制理论的不断发展,基于数学模型和控制算法的喘振控制方法逐渐得到广泛应用。
其中,基于自适应控制、智能控制和优化控制等方法的喘振控制技术,可根据实时传感器反馈信息,自动调整控制参数,从而使压气机保持稳定、高效的运行状态,有效避免喘振的发生和发展。
总之,大型透平式压缩机喘振问题是一个非常重要的研究领域,要防止和控制喘振现象,需要从结构改进和控制方法两个方面入手,利用现代科技手段不断完善喘振控制技术,最大限度地提高透平式压缩机的稳定性和安全性。
力控组态软件可变极限防喘振控制系统设计
第1期2018年2月No.1 February,2018应用可变极限防喘振的控制过程,是动态控制过程,使极限流量根据压缩机转速的变化而变化的一种控制方式。
采用了力控组态软件作为防喘振控制系统的控制方式,以合成氨装置压缩机喘振现象,对压缩机可变极限流量法防喘振控制法进行了设计[1]。
传统防喘振控制系统根据压缩机的性能曲线,通过自动控制,把压缩机的最小流量控制在“控制线内”,防止喘振现象发生。
传统的防喘振方法一般采用传统的“固定流量防喘振控制系统”,这种控制方法的缺点是不能充分使输气压缩机工作在其工作区内,频繁启动防喘阀(放空阀)浪费了能源,降低了输气的经济性[2]。
力控组态软件可以在较多的系统软件环境下运行,从Windows98系统直到最新版本的Windows 操作系统都可稳定运行,同时在Windows CE 和DOS 等嵌入式系统中,控制功能软件模块中也可以稳定运行,特别是在监控点数量较少的情况下,只要在监控组态软件中进行一些简单的组态工作,就会完成所需要的控制功能设置。
广泛的应用环境,使得力控组态软件在生产实践中得到广泛使用。
力控组态软件与传统的计算机控制系统相比较而言,不仅具有强大的数据处理功能,而且在连接方式上可采用软连接,显示样式灵活,画面丰富多彩,更改控制方案也更加容易。
针对各种恶劣环境和危险场景,控制比较分散,各种控制功能都比较完善,容易满足工程实际的技术要求,为管理者提供较大方便。
1 硬件设计部分应用可变极限防喘振DCS 控制系统,对合成氨生产装置的喘振状态进行相应的保护,事先对生产装置进行设定,设置安全停车工况后,大大降低了危险发生的可能性,这样就可以最大程度地保证人员、设备以及各种装置的安全性。
DCS 保护装置主要适用于高温、高压、易燃、易爆等连续危险隐患的安全保护系统,为了确保系统的整体性,保证机组控制实施安全可靠,此次设计还采用了双重化的控制系统,提高实际应用的稳定可靠程度。
大型压缩机防喘振控制及喘振保护方案
0引 言
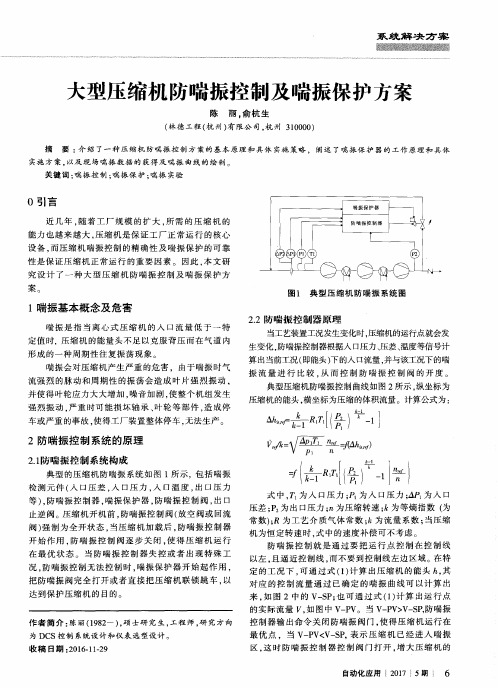
近几年 , 随着 工厂 规模 的扩大 , 所 需 的 压 缩 机 的 能力也越来越大 , 压 缩 机 是 保 证 工 厂 正 常 运 行 的 核 心 设备, 而 压 缩 机 喘 振 控 制 的 精 确 性 及 喘 振 保 护 的 可 靠 性 是保 证 压 缩 机 正 常 运 行 的 重 要 因 素 。 因 此 , 本 文研 究 设 计 了一 种 大 型 压 缩 机 防 喘 振 控 制 及 喘振 保 护 方 案。
: :
\
nI GV p  ̄
S M 1 0  ̄ — — 、
图3 防 喘振 控 制基 本逻 辑 图 防 喘振 控 制 和 H I C手 动 控 制 组 成 。3 个 控 制器 通 过 大 选选择器输出到防喘振控制阀门。 F I C防 喘振 控 制 器 为 一个 闭 环 的 P I 控制器 , 控 制
系 统 解 决 方 案
大型压 缩机 防喘振控 制及喘振保 护方案
陈 丽。 俞杭 生
( 林德 工程 ( 杭州) 有 限公 司 , 杭州 3 1 0 0 0 0 )
摘 要 : 介 绍 了 一 种 压 缩 机 防 喘 振 控 制 方 案 的 基 本 原 理 和 具 体 实施 策 略 , 阐 述 了 喘 振 保 护 器 的 工 作 原 理 和 具 体
控制器输 出命令关 闭防喘振阀 门, 使得压缩 机运行在
最优 点 。当 V — P V < V — S P , 表 示 压 缩 机 已经 进 入 喘 振
区. 这 时 防喘振控制 器控制 阀 门打开 , 增 大 压 缩 机 的
防喘振控制在压缩机改造中的应用

防喘振控制在压缩机改造中的应用随着工业科技的蓬勃发展,排气量大、运转周期长的离心式压缩机逐渐赢得市场信赖。
但不可忽略的是,频发的喘振现象已经成为离心式压缩机在工业应用中的首要桎梏。
文章将从阐述离心式压缩机防喘振控制系统的研究目的入手,结合离心式压缩机工作原理、喘振现象成因以及防喘振控制系统要素等研究基础,提出防喘振控制系统设计方案,旨在为离心式压缩机改良提供有益参考。
标签:防喘振;压缩机;系统设计;应用改造引言离心式压缩机是现代工业生产的重要基础性设备,广泛应用于冶炼、制冷、石油、化工等行业管线,具有重要的经济效益价值。
喘振是压缩机流量和压力迅速减少所导致的非正常状态振动,喘振不仅会降低离心式压缩机的工作效率,而且严重时可能造成风机叶片疲劳损耗。
因此,在压缩机改造过程中探究应用防喘振控制系统,具有重要的理论和实践价值。
1 离心式压缩机防喘振控制系统的研究目的1.1 喘振危害分析一旦压缩机发生喘振后,就导致压缩机难以正常工作。
其出口压力减小,整体压力将低于出口管道系统压力,进而使得气体从管道系统向压缩机倒流,直到管道系统中压力低于压缩机出口压力,此时倒流停止,压缩机恢复工作,但是当出口管道系统的压力恢復到原值时,通过压缩机的气体流量再一次减小,这时又发生喘振,如此反复,使系统呈周期性振荡,在整个过程中,压缩机组强烈振动,伴有异常噪声,严重时压缩机会受到损坏。
1.2 防喘振控制系统研究价值防喘振控制系统利用多样化技术手段,形成系统化的喘振预防和治理方案,可有效防止喘振现象发生;防喘振控制系统作为离心式压缩机控制体系的重要组成部分,便于技术人员及时了解设备状态,稳定控制压缩机器。
2 离心式压缩机防喘振控制系统的研究基础2.1 离心压缩机工作原理离心式压缩机属于透平压缩机的一种。
作为典型的叶片式旋转机械,其基本工作原理是通过气体与叶片的共同作用,赋予气体更强的压力和动能,继而利用流通元件促使气流减速,从而实现气流在压缩机内的径向流动。
DCS在防喘振控制系统中的应用
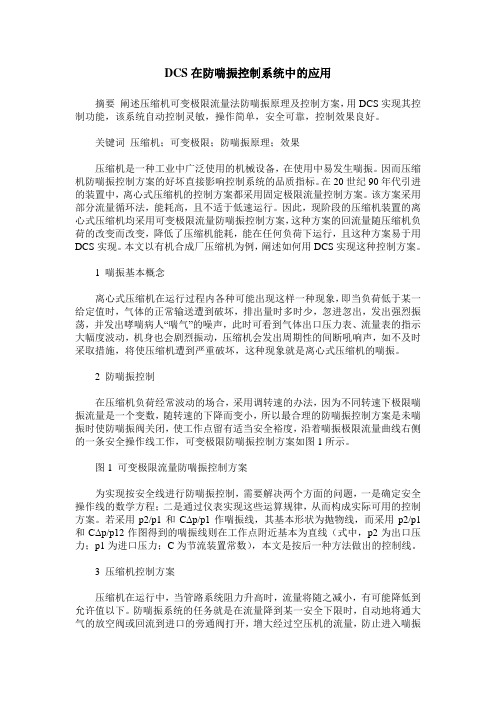
DCS在防喘振控制系统中的应用摘要阐述压缩机可变极限流量法防喘振原理及控制方案,用DCS实现其控制功能,该系统自动控制灵敏,操作简单,安全可靠,控制效果良好。
关键词压缩机;可变极限;防喘振原理;效果压缩机是一种工业中广泛使用的机械设备,在使用中易发生喘振。
因而压缩机防喘振控制方案的好坏直接影响控制系统的品质指标。
在20世纪90年代引进的装置中,离心式压缩机的控制方案都采用固定极限流量控制方案。
该方案采用部分流量循环法,能耗高,且不适于低速运行。
因此,现阶段的压缩机装置的离心式压缩机均采用可变极限流量防喘振控制方案,这种方案的回流量随压缩机负荷的改变而改变,降低了压缩机能耗,能在任何负荷下运行,且这种方案易于用DCS实现。
本文以有机合成厂压缩机为例,阐述如何用DCS实现这种控制方案。
1 喘振基本概念离心式压缩机在运行过程内各种可能出现这样一种现象,即当负荷低于某一给定值时,气体的正常输送遭到破坏,排出量时多时少,忽进忽出,发出强烈振荡,并发出哮喘病人“喘气”的噪声,此时可看到气体出口压力表、流量表的指示大幅度波动,机身也会剧烈振动,压缩机会发出周期性的间断吼响声,如不及时采取措施,将使压缩机遭到严重破坏,这种现象就是离心式压缩机的喘振。
2 防喘振控制在压缩机负荷经常波动的场合,采用调转速的办法,因为不同转速下极限喘振流量是一个变数,随转速的下降而变小,所以最合理的防喘振控制方案是未喘振时使防喘振阀关闭,使工作点留有适当安全裕度,沿着喘振极限流量曲线右侧的一条安全操作线工作,可变极限防喘振控制方案如图1所示。
图1 可变极限流量防喘振控制方案为实现按安全线进行防喘振控制,需要解决两个方面的问题,一是确定安全操作线的数学方程;二是通过仪表实现这些运算规律,从而构成实际可用的控制方案。
若采用p2/p1和CΔp/p1作喘振线,其基本形状为抛物线,而采用p2/p1和CΔp/p12作图得到的喘振线则在工作点附近基本为直线(式中,p2为出口压力;p1为进口压力;C为节流装置常数),本文是按后一种方法做出的控制线。
压缩机防喘振控制描述
通过弯头二选一进入 C. 立即进入上游放空筒的阀门管道布置
防喘振阀的设计要求 防喘振阀的设计标准 设计流速 性能特点 手动操作 最大供压下的允许泄漏量 安全位置 定位器 噪声等级限制 时间要求设定 可控开 快开 关 离心式压缩机 放空阀带气动执行器 ≤3 秒(全行程) <2 秒(全行程) 10~20 秒 压缩机设计流量的 130%(在设计压力下) 线性(最大 2%的线性偏差) 无(机械保护) 单座阀 0.01% 双座阀 0.5% 弹簧开,气/油关 气动/液动 <112Db(A)由于机械原因 轴流式压缩机 放空阀带液动执行器 ≤1.5 秒(全行程) ≤1 秒(全行程) 10~20 秒
体压缩机的防喘振控制。 声明的第一部分完全正确,第二部分是错的 工艺气压缩机是根据工艺要求定制的。他们通常设计成比如所有的操作点都在喘振区以 外。如果工艺按照说明操作,压缩机从不会在喘振危险线下运行。甚至没有自动防喘振 控制提供相同等级的保护。 防喘振控制仅仅是那些规格书或那些工艺没按设计或预期的情况操作而出现的事故的 要求。在压缩机被设计为部分回流的地方仅有非常少的一部分应用。在所有的别的应用 中, 防喘振控制回路充当保险契约。 既然没有事故发生, 以最低成本选择仪表是最好的。 保险契约的效力仅在发生严重事故的情况下起作用。上述情况同样适用于防喘振控制。 在此之前已经发生最严重的波动,防喘振控制可以认为满足要求。 3. 慢速或快速忧动 3.1 压缩机性能图的影响 工艺气压缩机性能曲线在邻近喘振时通常非常平。在防喘振曲线和喘振线之间典型 的坡度是 10%。典型图表请看图 1.。在一些应用中,有的坡度更平。 API 要求到喘振有 6%的最小扬程。意思是压缩机在喘振线的压头必须高于设计压头 6%。但请注意越靠近喘振线性能曲线越趋于水平。 防喘振线最具代表性的就是处于喘振线右 10%。这个距离通常被称为喘振流量。由 于喘振线代表性是满负荷流量的 40%到 80%,所以安全距离也代表性的为满负荷流 量的 4%到 8%。 在下面的注意事项中,处在 60%处的平均喘振线是一假定值。意思是安全距离算出 是满负荷流量的 6%。 依据 10%斜率,6%流量符合 0.6%的压力。 观点 1:0.6%的压力变化将会使压缩机的运行点从控制线进入喘振线。 3.2 什么能导致压缩机压力以 0.6%变化 根据第一种方法,压缩机压头就此压比被认为和转速的平方成正比。 观点 2:1.2%速度降低会带来压缩机运行点从控制线到喘振线。 压缩机转速一般限制在的 70%到 105%既整个量程的三分之一。 如果升速/降速命令被限制为在 60 秒内从最小到最大或相反, 100%速度变化需要 180 秒。1.2%的变化仅需要 2.16 秒。 观点 3:按下降速按钮时间超过 2.2 秒会使压缩机运行点从控制线到喘振线。 上述情况同样适用于多种形状的压缩机。 一个相似的扰动可能是由于串联或并联运行的压缩机引起。 改变串联压缩机性能的 0.6%会导致另一台压缩机进入喘振线。 如果两台压缩机平行操作,一台压缩机排气侧压力轻微下降将导致单向阀关闭。紧 接着在 1.5 秒内整个流量会下降 60%。 4. 防喘振控制器性能 防喘振控制器被用来避免压缩机进入喘振区。为了解他们的工作方式,下面给出了一些 解释。 有代表性的防喘振控制器由闭环控制和开环控制两部分组成。 防喘振控制器的输出作用到回流阀或放空阀上使得出口气体回流到入口端或放空。 防喘振控制阀典型的行程时间,关要 6 秒,开要 2 秒。他们典型的对应 70%到 130%的 设计流量。 开环控制仅适用于一些特殊的波动情况。速度信号以 1.2%改变不能看作这一波动情况。 因此,只有闭环控制才能对付这种现象。
喘振预防控制器数据手册

喘振预防控制器数据手册喘振预防控制器CCS 的喘振预防控制器〔SPC〕能够有效和靠谱地保护压缩机防备喘振。
CCS 能精准地在条件大范围变化状况下界定喘振线并可设置控制线来优化喘振保护,不需要其余不用要的再循环或放气〔装置〕。
目前控制器在使用气体成分恒定的透平压缩机上的应用已经有详尽描绘。
喘振控制策略图 1 为喘振预防控制系统的配置和其与压缩工艺过程中的连结图。
它包含以下丈量装置:转速变送器,导叶地点变送器,进口压力变松器,进口温度变送器。
注意安装丈量压缩机流量和 /或功率的传感器是希望〔理想〕的但不是必需的。
为预防压缩机喘振,该系统打开安装在紧邻压缩机排放输送管旁的防喘振阀门。
尽人皆知,动向压缩是由增添气流的特定机械能量〔用多变压头表示〕来实现的。
这个多变压头的增添〔 H p〕能够这样计算:此中:B是比率常数,是压比 (=Pd/Ps),σ是多变指数 ,是吸入温度,MW 是分子量,是均匀压缩因数。
喘振极限条件的压比的数值,能够依据喘振试验获取的转速和〔或〕导叶地点经验性函数获取。
它也可依据压缩机厂商供给的理论上的压缩机性能图进行计算获取。
确立目前吸入温度〔T s st〕下的喘振极限多变压头为转速和〔或〕导叶地点方程以下:关于恒定气体组分的气体或空气,鼓风机在随意给定的转速和/或导向叶片地点状况下,我们假定压缩效应是能够忽视的。
喘振极限条件压比在不一样吸入温度和随意给定的转速条件下能够计算为:这个包含吸入温度赔偿因数关系的修正参数方程与不变坐标系下的标准版本不一样。
多变指数不可以被丈量。
该变量需要依据目前气体组分和压缩机效率进行确立。
所以多变指数一定被假定。
在其被设置不精准的状况下,将可能致使对喘振极限设定点的错误估量。
温度校订线会出现负斜率,换句话说,增添吸入温度会惹起在IGV 相同速度下喘振线压力比值的减少。
此外,效率和气体组分假定上的变化值也会影响赔偿系数使受影响跨度 1%之内。
在算法中引入吸入温度的主要优势就在于,它能够在不停改变的气体组分和 /或效率假定中保证精准的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
50
石油化工自动化
2003 年
振线, 其 基 本 形 状 为 抛 物 线, 而 采 用 p 2/ p 1 和 C p / p1 2 作图得到的喘振线则在工作点附
近基本为直线( 式中, p 2 为出口压力; p 1 为进口压 力; C 为节流装置常数) , 本文是按 后一种方法做 出的控制线。
根据操作线方程所得合成气压缩机的预期性 能指标如图 3 所示。
该压缩机厂给出
K 1 = M W/ [ 2g 2 2 ZRT 1 A 2 ∀ 36002] =
2 24 ∀ 10- 10
利用表 1 中的参数得控制参数为
S V = 1 12 ∀ 10- 3
2 4 控制参数校验
将该 DCS 用于中海油合成氨装置中, 设定工
况为: p 1= 3. 504 MP a; p 2= 10. 301 M Pa; qV max = 1 7 ∀ 105 m3/ h; p max= - 24 5 kPa。
2) 操作简单。利用 DCS 强大的计算功能, 机 组正常运行期间, 只需要给防喘振控制器一个固定 的控制参数 S V , 系统就能完成温度、压 力自动补 偿及控制。
3) 加入了压缩机出口压力超驰功能。当压缩 机出口压力达到设定的最大值时, 防喘振控制阀由 压力控制器控制, 即控制在控制线的水平线。
压缩机是一种工业中广泛使用的机械设备, 在 使用中易发生喘振。因而压缩机防喘振控制方案 的好坏直接影响控制系统的品质指标。在 20 世纪 70 年代引进的大化肥装置中, 离心式压缩机的控 制方案都采用固定极限流量控制方案。该方案采 用部分流量 循环法, 能耗高, 且不适于低速运行。 因此, 现阶段的大化肥装置的离心式压缩机均采用 可变极限流量防喘振控制方案, 这种方案的回流量 随压缩机负荷的改变而改变, 降低了压缩机能耗, 能在任何负荷下运行, 且这种方案易于用 DCS 实 现。本文以中海石油公司合成氨装置合成气压缩 机为例, 阐述如何用 DCS 实现这种控制方案。 1 压缩机防喘振控制原理 1 1 喘振点的基本概念
1998, 24(1) : 76- 82 [ 2] 刘川来. 数据控制器 PID 参数的闭 环自整定 [ J] . 化 工自动
化及仪表, 1985, 12( 4) : 22- 26 [ 3] 陶永华, 尹怡欣, 葛芦 生. 新型 PID 控 制及 其应 用[ M ] . 北
京: 机械工业出版社, 2000 [ 4] 朱麟 章. 过程控 制系统 设计 [ M ] . 北 京: 机械 工业出 版社,
Application of DCS in Compressor Anti surge Devices Y AN G Fan1, ZHAO Hong qiang 2
( 1. Wuhan Inst. of Chemical T ech. , Wuhan, 430073, China; 2. China Ocean Pet rochemical Lt d. Device Co. in Check, Dongfang, 572600, China)
参考文献: [ 1] 肖绍篙. 离心压缩机的防喘振分析与控制[ J ] . 压缩机技术,
2002, ( 3): 4- 7.
[ 2] 李红. 离心式压缩 机实施防 喘振控制 浅析[ J ] . 石油化 工设 备技术, 1999, ( 2) : 29- 32
[ 3] 罗辉. Freelance 2000 DCS 在轴 流机上的应用 [ J] . 石油化工 自动化, 2002, ( 2) : 30- 32
收稿日期: 2001 07 20; 修改稿收到日期: 2003 04 08 作者简介: 杨 帆( 1966- ) , 女, 湖北公安人, 1988 年毕业于武 汉化工学院自控系, 获学士学位, 2000 年毕业于武汉理工大学机械 电子工程专业, 获硕士学位, 副教授, 主要研 究过程控制、智能化仪 表及分形混沌理论, 已发表论文 21 篇。
程为
p 2/ p 1=
K
q
2 V
+
1
1. 0
( 1)
则有
q2 V=ຫໍສະໝຸດ 1( p2/ p 1-
1
0) / K
其中 K = 2 0 ∀ 10- 7
而 q2V 1正比于节流装置产生的差压 p , 即
qV1 =
F0
2 !1
p
q2V = p / K 1 1
则 S V= p / ( p 2- p 1) = K 1/ C1
由式( 1) 得 qV 1 = [ ( p 2/ p 1 - 1. 0) / K ] 1/ 2 = 3 114 ∀ 103
m3/ h( 标准状况) 由 ( q V 1/ q V max) 2= p 1/ p max 计算得 p 1= 7 627 MP a,
则控制参数: S V = p 1/ ( p 2- p 1) = 7. 627/ ( 10. 301- 3. 504) = 1. 12 ∀ 10- 3
案是未喘振时使防喘振阀关闭, 使工作点留有适当 安全裕度, 沿着喘振极限流量曲线右侧的一条安全 操作线工作, 如图 1 所示, 可变极限防喘振控制方 案如图 2 所示。
图 1 可变极限流量防喘振法 为实现按安全线进行防喘振控制, 需要解决两 个方面的问题, 一是确定安全操作线的数学方程; 二是通过仪表实现这些运算规律, 从而构成实际可 用的控制方案。若采用 p 2/ p 1 和C p / p 1 作喘
摘要: 阐述了压缩机可变极限流量法防喘振原理及控制方案, 将该控制方 案用于合成氨装 置中, 并用 Cent em CS 实现其控
制功能, 操作简单, 控制效果良好。
关键词: 压缩机; 可变极限; 防喘振原理; 效果
中图分类号: TP273; TP271. 4
文献标识码: B
文章编号: 1007 7324( 2003) 04 0049 03
51
07001C 为 S V 。
2 3 控制参数的确定
由图 3 知, 控制线为一变量, 说明调节器( XC
07001) 的 S V 为一变量, 这也是可变极限流量防喘 振控制的特点。但通过 DCS 强大的运算功能, 最
终 S V 却是一常数, 由控制功能图 4 可以看出。下
面从理论上推导 S V 的值。 由合成气压缩机预期性能曲线可得控制线方
在某一转速下, 当压比一定时, 保证气压机入 口流量不低于最小流量值的控制点为喘振点。将 喘振点连成的线称为喘振线。为安全起见一般喘 振线都设有一定的安全裕度( 7% ~ 10% ) , 称为防 喘振线( 工作线或控制线) 。 1 2 防喘振线作图方法
在压缩机负荷经常波动的场合, 采用调转速的 办法, 因为不同转速下极限喘振流量是一个变数, 随转速的下降而变小, 所以最合理的防喘振控制方
控制功能图中每一个功能块就是 DCS 中的一 个软件块。
其中 P C 07002 为压缩机速度控制; PC 07003
图 4 DCS 控制功能框图 为压缩机出口压力超施控 制; SY 07001 为压缩机 进、出口压 差, 作 为压缩机 进口压力 的补偿; HC
第4期
杨 帆等 DCS 在压缩机防喘振控制系统中的应用
由此可见, 在 DCS 实现的该防喘振 控制系统 能实现图 3 中控制线, 且工艺操作人员只需输入一 个定值, 该系统就能自动完成防喘振控制。 3 结束语
该套防喘振控制系统具有通用性, 除可用于合 成氨装置外, 还能用于乙烯装置空分装置和炼油装 置的压缩机防喘振控制。该系统有如下特点。
1) 开停车方便。由于机组远离中央控制室, 开 停车时切至 HC( 压缩机控制室手操器) 控制, 升到 最小转速时再切换到自动控制。
表 1 压缩机厂提供的参数
输送 气体
进气 可压缩 分子量 系数 比热比 温度/
进气 压力/ M Pa
8. 758/
H2+ N 2
1. 022 1. 414 38 3 573
8. 743
图 3 压缩机预期性能曲线 2 2 压缩机防喘振控制功能图
为了实现 上述压缩机预 期性能曲 线, 在设 计 DCS 控制方案时, 设置了两个防喘振调节器, 其中 一个( H C 07001) 始终处于 自动! 状态, 保证压缩 机始终受到自动保护, 避免因处理不当引起喘振时 不能及时打开放空阀; 同时还设置了一个手动控制 器( HC 07001A) , 其输出与自动调节器的输出经过 低选! ( XY 07001C) 后送 到放空阀 ( AAM51) , 这 样便可实现自动与手动控制相结合。
图 2 可变极限防喘振控制方案 2 合成塔压缩机防喘振控制方案
根据压缩机防喘振的原理, 本文以合成氨装置 日立压缩机为例, 设计了一套用 DCS 实现的防喘 振控制方案。 2. 1 确定压缩机防喘振控制线
若不考虑分子量的变化, 合成气压缩机喘振特 性曲线附近可以近似为一条直线:
p / p 1= K p 2/ p 1+ b ( K 为斜率, b 为截距) 合成气压缩机喘振线所需的参数如表 1 所列。
计算机应用
石 油 化 工 自 动 化, 2003, 4: 49 AU T OM A TIO N IN PET RO CHEM ICAL IN DU ST RY
DCS 在压缩机防喘振 控制系统中的应用
杨 帆1, 赵红强2 ( 1 武汉化工学院 自动化系, 湖北 武汉 430073; 2 中海石油检修工程公司 自控部, 海南 东方 572600)
Abstract: T he ant i surge principle and cont rol scheme of vary limit flow of compressor are st udied, it has been used in dev ice of anabolism NH3, t he funct ion is realized in Centem CS, t he operation is simple and ef fect is all r igh t. Keywords: compressor; vary limit; ant i surge principle; ef fect