基于atmega8的跑马灯
atmega8原理及应用手册

atmega8原理及应用手册摘要:1.ATmega8 概述2.ATmega8 的原理3.ATmega8 的应用4.ATmega8 的发展历程5.总结正文:1.ATmega8 概述ATmega8 是一款由atmel 公司推出的高档单片机,它属于AVR 家族中的一员。
在2002 年第一季度问世,ATmega8 以其较高的性能和丰富的硬件接口电路,在市场上取得了较好的反响。
其芯片内部集成了较大的存储器和强大的硬件接口电路,具备了AVR 高档单片机mege 系列的全部性能和特点。
2.ATmega8 的原理ATmega8 采用了先进的RISC 架构,具有较高的执行效率。
其内部集成了较大的Flash 存储器和SRAM 存储器,能够满足各种复杂应用的需求。
同时,ATmega8 还具备丰富的硬件接口,如UART、I2C、SPI、定时器等,方便用户进行各种外设的扩展。
3.ATmega8 的应用由于ATmega8 具备较高的性能和丰富的硬件接口,因此在各种领域都有广泛的应用。
常见的应用领域包括工业自动化、智能家居、消费电子、医疗设备等。
例如,在工业自动化领域,ATmega8 可以用于控制机器人、机床等设备;在智能家居领域,ATmega8 可以用于控制灯光、家电等设备;在消费电子领域,ATmega8 可以用于制作智能手机、平板电脑等设备。
4.ATmega8 的发展历程自2002 年推出以来,ATmega8 一直在不断升级和改进。
随着工艺技术的不断提高,ATmega8 的性能和功耗得到了进一步的优化。
同时,atmel 公司还推出了基于ATmega8 的众多衍生产品,如ATmega8L、ATmega8A 等,以满足不同市场的需求。
5.总结作为一款高档单片机,ATmega8 凭借其强大的性能和丰富的硬件接口,在各种领域都得到了广泛的应用。
任务9 用自制的跑马灯电路实现8只LED循环点亮

任务9 用自制的跑马灯电路实现8只 任务 用自制的跑马灯电路实现 只LED循环点亮 循环点亮
• (2)短调用指令ACALL addr11 ;;PC←PC+2 • ;SP←SP+1 • ;(SP)←PC7-0 • ;SP←SP+1 • ;(SP)←PC15-8 • ; PC10-0←addr10-0
9.1.2 跟我想 1. 编写跑马灯程序思路 该任务要求通过编写程序,使连接P0口的8个LED灯循环点亮(跑马灯), 每个灯点亮的时间为0.5秒。怎样来编写程序呢?我们用一个寄存器R1存储 用于点亮P0口的LED灯的数据,R1首先存储点亮与P0.0相连的LED灯D0 (数据为:0000001H),可以通过指令MOV P0,R1将与P0.0相连的 LED0点亮,然后调用延时0.5秒的程序,延时时间到后,可以带进位位左移 指令RR A,将R1中的数据左移一位(数据为:00000010),再送给P0口, 点亮与P0.1相连的LED灯D1,依次类推;用寄存器R2存储LED灯从D0移动 到D7的移动次数为8次,每移一次减1,R2的值为0时,表示第1次循环结束, 接下来又从点亮D0开始下一个循环,就这样反复循环点亮,达到跑马灯的效 果。 在编写程序之前,让我们学一学相关指令的功能和用法。
任务9 用自制的跑马灯电路实现8只 任务 用自制的跑马灯电路实现 只LED循环点亮 循环点亮
• • 2)移位指令 ) 移位指令的功能是对累加器A的内容进行循环移位,除了带进位标 志位CY的移位指令会影响CY外,其它指令都不影响CY、AC、OV等标志 位。 RL A ;循环左移指令;
图6-1 RL A指令示意图
• • • • • • • • • • • • • • • • • • • • • • ORG 0000H AJMP START ;转移至标号START ORG 0030H ;以下程序下载到单片机的ROM时,从ROM的0030地址开始存储 START: MOV R1, #00000001B ;将立即数01H送R1 MOV R2, #08 ;将立即数8送R2,循环8次(8个灯) LOOP: MOV A, R1 ;将R1中的数送A MOV P0, A ;将A中的数送P0口,点亮LED灯 CALL DEL1S ;调用延时子程序,控制亮灯时间 RL A ;A中的数据左移一位,为下一次亮灯作准备 MOV R1, A ;左移后的数据存放在R1 DJNZ R2, LOOP ;循环了8次吗?没有则继续 AJMP START ;完成8次循环,转移至START重新开始 ;***************1秒钟延时子程序************************************* DEL1S: MOV R3, #5 DEL: MOV R4, #100 DEL1: MOV R5, #250 DEL2: NOP DJNZ R5, DEL2 DJNZ R4, DEL1 DJNZ R3, DEL RET END
iar编写stm8跑马灯

iar编写stm8跑马灯一、介绍STM8跑马灯的背景和意义STM8是一款高性能、低成本的微控制器,广泛应用于各种嵌入式系统中。
跑马灯是一种常见的显示效果,通过STM8实现跑马灯不仅可以展示微控制器的性能,还能为各种应用场景增添趣味性。
本文将详细介绍如何使用STM8编写跑马灯程序,并分享一些实用技巧。
二、硬件电路设计要点1.选择合适的LED灯珠:根据需求选择合适的LED灯珠,如颜色、亮度、间距等。
2.驱动电路:选用合适的驱动电路,如MOSFET、驱动IC等,以满足LED灯珠的电流需求。
3.连接方式:将LED灯珠正确连接到STM8的GPIO端口。
4.电阻配置:根据LED灯珠的电压和电流要求,合理配置限流电阻。
三、软件编程思路与实现1.初始化GPIO:配置GPIO端口为输出模式,设置初始状态。
2.编写主循环:在主循环中,通过移位或循环移位的方式,切换GPIO端口的输出状态。
3.定时器配置:根据需求设置定时器,实现跑马灯的的速度控制。
4.循环次数与速度调整:根据实际效果调整循环次数和速度,以达到最佳效果。
5.优化:根据实际情况,优化程序,提高运行效率和稳定性。
四、调试与优化1.硬件调试:通过观察LED灯珠的显示效果,检查硬件连接和驱动电路是否正确。
2.软件调试:使用串口或其他调试工具,观察程序运行状态,查找问题。
3.优化:根据实际需求和性能指标,对程序进行优化,提高运行效率和稳定性。
五、总结与展望本文详细介绍了如何使用STM8编写跑马灯程序,通过硬件电路设计和软件编程实现了一款趣味性十足的跑马灯。
在实际应用中,可以根据需求调整LED灯珠、驱动电路和程序,实现更多种跑马灯效果。
51单片机8个跑马灯程序设计思路
51单片机8个跑马灯程序设计思路单片机是一种集成电路,内部包含了计算机的主要组件,如中央处理单元(CPU)、存储器等。
通过编程,可以实现各种不同的功能。
在这里,我将以设计一个8个跑马灯的程序为例,来讲解单片机程序的设计思路。
1.硬件准备首先,我们需要准备一个适用于单片机的开发板,例如STC89C52,以及8个LED灯。
将LED灯连接到开发板的GPIO引脚上,并通过电阻进行限流。
使用跳线将GPIO引脚与LED灯的正极连接。
2.程序结构设计在单片机程序中,我们通常会使用循环结构。
因此,在设计跑马灯程序时,我们可以使用一个无限循环,来实现LED灯的闪烁效果。
具体的程序结构如下所示:```c#include <reg52.h>sbit led0 = P0 ^ 0; //第1个LED灯sbit led1 = P0 ^ 1; //第2个LED灯sbit led2 = P0 ^ 2; //第3个LED灯//...sbit led7 = P0 ^ 7; //第8个LED灯void mainwhile (1)//跑马灯代码}}```在这段代码中,我们首先引入头文件`reg52.h`,它包含了STC89C52的寄存器定义和常用函数的声明。
然后,我们定义了8个宏,用于表示8个LED灯所连接的引脚号。
接下来,在`main(`函数中,我们使用一个无限循环`while(1)`,来实现LED灯的闪烁效果。
3.跑马灯实现思路在无限循环中,我们需要通过对GPIO的控制来实现8个LED灯的闪烁。
具体的实现思路如下:- 首先,我们可以定义一个变量`index`,用于表示当前亮起的LED灯的索引值。
初始时,`index`的值为0,表示第一个LED灯亮起。
- 然后,我们可以使用`switch...case`语句来判断当前的`index`值,从而控制不同的LED灯亮起。
- 在每次循环中,我们可以通过对`index`的递增来实现灯的滚动效果。
基于ATmega8的PWM双闭环直流调速设计论文

本论文主要是对双闭环PWM直流调速系统的研究,实现对电动机的数字化控制。
在设计中,对PWM直流调速的原理、双闭环直流调速原理和特点进行了全面阐述。
为实现系统的微机数字化控制,采用了ATmega8作为整个控制系统的核心部分,配以显示、驱动、测量等模块,实现对电动机转速参数的显示和测量。
硬件组成包括ATmega8单片微机、电流检测模块、转速检测模块、保护模块、键盘模块、显示模块、直流电机驱动模块等组成。
在设计中,采用PWM调速方式,通过改变PWM的占空比从而改变电动机的电枢电压,为了提高控制系统的性能和可靠性,设计中,对电流环和转速环采用PID调节器。
在软件实现中,本系统采用增量式PID控制算法来改变PWM的占空比,在硬件结构上采用了集成电路模块,简化了硬件电路,提高了系统的稳定性和可靠性,使整个系统的性能得到提高。
实现了直流电动机的实时数字PWM控制,具有控制方便、组态简单和灵活性大等优点。
关键词:ATmega8单片机;直流电机;PWM调速; 双闭环; PIDThis paper is mainly to the double loop DC speed control system of study PWM, to achieve the digital control of DC motor. In the design, the principle of the PWM DC Motor Speed Control, the principle and characteristics of Double Closed Loop DC Speed Control are analyzed comprehensively expounded. For the realization of digital control computer system, using the ATmega8, as the core of the whole control system, together with the display, drive, measurement modules, to achieve the motor speed parameter display and measurement. Hardware includes the ATmega8 single chip microprocessor, the current detection module, speed detection module, protect module, keyboard module, the display module, the driver module of DC motor and other components. In the design, using PWM control mode, through changing the PWM duty cycle to change the motor armature improve the control performance and reliability of the system, the design of current loop and rotational speed, using PID regulator. In this system, the software realization of incremental PID control algorithm is adopted to realize PID parameters of the system and the software programming realize speed current digital PID adjuster operations and generate digital PWM waves.In the software implementation, the system uses the incremental PID control algorithm to change the PWM duty cycle. In the hardwarestructure of integrated circuits using modules, greatly simplified the hardware circuit, improve the stability and reliability of the system, the system's performance improved. It realizes the real-time digital PWM motor control, with convenient control, simple and flexible configuration advantages.Key words: ATmega8 microcontroller; DC motor: PWM Speed Regulator; Double closed loop; PID目录1 绪论 (6)1.1 课题的背景和意义 (6)1.2 课题研究的主要内容 (7)2 直流电机PWM调速原理和总体方案确定 (7)2.1直流电机PWM调速原理 (7)2.2 PWM脉冲产生方式 (9)2.3 双闭环直流调速系统的介绍 (10)2.3.1 双闭环直流调速系统的工作原理 (10)2.3.2 双闭环调速系统的作用 (12)2.3.3 数字双闭环直流调速系统 (12)3 系统总体方案分析与设计 (13)3.1系统总体方案的分析 (13)3.2 系统总体方案的设计 (13)4 系统硬件电路设计 (14)4.1 ATmega8单片机最小系统 (14)4.1.1 ATmega8的简介及特点 (14)4.1.2 ATmega8单片机的最小系统的其他电路设计 (16)4.2 电源模块电路设计 (17)4.3 直流电机驱动模块设计 (18)4.3.1 H桥驱动电路原理 (18)4.3.2 直流电机驱动电路设计 (18)4.4 隔离模块电路设计 (21)4.5 键盘电路设计 (22)4.6 速度和电流检测模块电路设计 (24)4.6.1 速度检测电路设计 (24)4.6.2 电流检测电路设计 (26)4.7 转速显示电路模块设计 (26)4.8 串行通信模块电路设计 (27)5电机控制策略的研究 (28)5.1 PID算法 (28)5.2 数字滤波算法 (32)6 系统软件设计 (33)6.1 主程序设计 (33)6.2 初始化程序设计 (34)6.3 中断服务子程序设计 (34)7 总结与展望 (38)参考文献 (39)附录..................................................... 错误!未定义书签。
iar编写stm8跑马灯
iar编写stm8跑马灯一、概述跑马灯是一种常见的LED灯效,通过依次点亮和熄灭LED灯,形成像跑马一样的效果。
本文将介绍如何使用IAR编写STM8跑马灯程序。
二、硬件准备在开始编写跑马灯程序之前,需要准备以下硬件: 1. STM8开发板:用于运行程序的主控板。
2. LED灯:用于显示跑马灯效果的灯珠。
三、软件准备在开始编写跑马灯程序之前,需要准备以下软件: 1. IAR Embedded Workbench:用于编写和调试STM8程序的集成开发环境。
四、编写跑马灯程序以下是使用IAR编写STM8跑马灯程序的详细步骤:1. 创建新工程在IAR Embedded Workbench中,选择”File” -> “New” -> “Project”,然后选择STM8作为目标平台,输入工程名称并选择保存路径。
点击”OK”创建新工程。
2. 配置工程在工程中,选择”Project” -> “Options”,在弹出的对话框中选择正确的芯片型号和调试器。
点击”OK”保存配置。
3. 编写主程序在IAR Embedded Workbench的工程窗口中,选择”Project” -> “Add New File”,然后输入文件名和保存路径。
点击”OK”创建新文件,并在文件中编写主程序。
以下是一个简单的跑马灯程序示例:#include <iostm8s103f3.h>#define LED_PORT GPIOC#define LED_PIN GPIO_PIN_3void delay(unsigned int n){unsigned int i, j;for (i = 0; i < n; i++)for (j = 0; j < 1000; j++);}int main(void){GPIO_Init(LED_PORT, LED_PIN, GPIO_MODE_OUT_PP_LOW_FAST);while (1){GPIO_WriteLow(LED_PORT, LED_PIN);delay(1000);GPIO_WriteHigh(LED_PORT, LED_PIN);delay(1000);}}4. 编译和下载程序点击IAR Embedded Workbench的工具栏中的”Make”按钮编译程序。
最简单的八路跑马灯
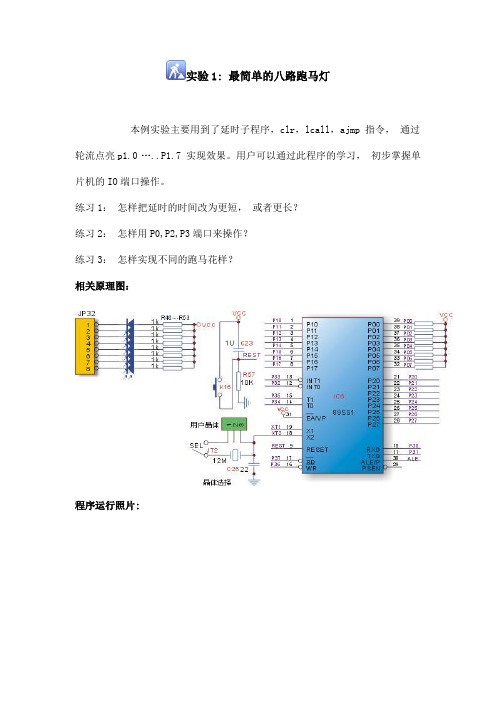
实验1: 最简单的八路跑马灯本例实验主要用到了延时子程序,clr,lcall,ajmp 指令,通过轮流点亮p1.0 …..P1.7 实现效果。
用户可以通过此程序的学习,初步掌握单片机的IO端口操作。
练习1:怎样把延时的时间改为更短,或者更长?练习2:怎样用P0,P2,P3端口来操作?练习3:怎样实现不同的跑马花样?相关原理图:程序运行照片:接线方法:用一条8PIN的数据排线把CPU部份的P1口(JP44)连接到八路指示灯部份的JP32接线图以及运行瞬间的照片(可以看到8路指示灯轮流点亮)程序流程图:汇编语言参考程序:org 0000h ;开始ajmp looporg 0080h ;到0030h处避开00-30的敏感地址loop:mov p1,#0ffh ;关闭所有灯clr p1.0 ;点亮灯p1.0lcall delay ;延时一段时间?clr p1.1 ;点亮灯p1.1lcall delayclr p1.2 ;点亮灯p1.2lcall delayclr p1.3 ;点亮灯p1.3lcall delayclr p1.4 ;点亮灯p1.4lcall delayclr p1.5 ;点亮灯p1.5lcall delayclr p1.6 ;点亮灯p1.6lcall delayclr p1.7 ;点亮灯p1.7lcall delayAJMP LOOP ;到最开始loop处重新运行delay: mov r5,#20 ;延时。
d1: mov r6,#40d2: mov r7,#248djnz r7,$djnz r6,d2djnz r5,d1retendc语言参考程序:#include<reg51.h> //头文件#define uchar unsigned char //宏定义,为方便编程#define uint unsigned int#define LED P1 //宏定义,将P1口定义为LEDuchar led_value[]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0x00}; //定义一数组,内存放跑马灯数据uchar *p=led_value; //定义指针,指向跑马灯数组首地址void delay() //延迟函数,与跑马灯跳动频率有关{uchar ii,jj;for(ii=0;ii<200;ii++)for(jj=0;jj<200;jj++);}void run_led() //跑马灯运行函数{while(*p!=0x00){LED=*p; //将数组中数据取出赋给P1口p++; //预取下一数据delay(); //延迟}p=led_value;}char code SST516[3] _at_ 0x003b; //仿真器保留main() //主函数{while(1)run_led(); //上电即运行跑马灯程序}。
用PLC和触摸屏设计八位跑马灯

用P L C和触摸屏设计八位跑马灯(总19页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--毕业设计(论文)2013– 2014 学年度机电工程系电气自动化技术专业班级11电气班学号课题名称用PLC和触摸屏设计八位跑马灯学生姓名指导教师2013 年月日目录前言 (3)第一章关于PLC介绍 (3)结构 (3)2.工作原理 (4)的指令系统 (6)第二章毕业设计任务及要求 (6)一.跑马灯设计方案 (6)1.跑马灯电路的设计 (6)2.开关电路的设计 (7)3.本设计的系统配置及输入/输出继电器地址分配 (8)二.控制系统的梯形图 (9)第三章触摸屏设计 (14)第四章电路的组装与调试 (19)1.安装与调试的方法 (19)2.调试过程 (19)3.预计会出现的问题 (19)第五章总结 (20)用PLC和触摸屏设计一个模拟跑马灯[摘要]本次毕业设计是应用S7-200 PLC跑马灯设计的硬件电路,并利用OB1的梯形图控制程序设计。
通过控制S7-200 PLC的定时继电器的功能来实现各灯按一定的规律点亮和熄灭。
接通延迟定时器SD的特点(如果RLO有正跳沿,则接通延迟定时器启动指令,以设定的时间值启动指令的定时器)。
这种控制电路结构简单,可靠性高,应用性强;软件程序适应范围广,对各灯按一定的规律点亮和熄灭的控制,只需要改变相应的定时器的时间接通即可。
[关键词] PLC 梯形图;前言本次毕业设计是应用S7-200 PLC跑马灯设计的硬件电路,并利用OB1的梯形图控制程序设计。
通过控制S7-200 PLC的定时继电器的功能来实现各彩灯按一定的规律点亮和熄灭。
接通延迟定时器SD的特点(如果RLO有正跳沿,则接通延迟定时器启动指令,以设定的时间值启动指令的定时器)。
这种控制电路结构简单,可靠性高,应用性强;软件程序适应范围广,对各彩灯按一定的规律点亮和熄灭的控制,只需要改变相应的定时器的时间接通即可。
iar编写stm8跑马灯
iar编写stm8跑马灯STM8是意法半导体(STMicroelectronics)推出的一款8位微控制器,被广泛应用于各种嵌入式系统中。
本文将以STM8为基础,编写一个简单的跑马灯程序。
跑马灯是一种常见的灯光效果,通过控制多个LED灯的亮灭来模拟跑马灯的效果。
通过编写STM8跑马灯程序,我们可以学习到如何使用STM8的GPIO功能以及控制LED 的原理。
我们需要准备一块STM8开发板、若干个LED灯和适配器等硬件设备。
接下来,我们将通过iar集成开发环境来编写STM8跑马灯程序。
1. 初始化引脚:首先,我们需要将LED连接到STM8开发板上的相应引脚。
在STM8中,每个引脚都有一个对应的寄存器用于控制它的状态。
我们需要设置这些寄存器来初始化引脚,并使其工作在输出模式。
2. 编写跑马灯程序:在STM8中,我们可以通过修改引脚寄存器来控制LED的亮灭。
为了实现跑马灯效果,我们可以通过循环遍历每个LED,并依次点亮或熄灭它们。
具体实现的代码如下:```#include <stm8s.h>#define LED_PORT GPIOA#define LED_PIN_1 GPIO_PIN_1#define LED_PIN_2 GPIO_PIN_2#define LED_PIN_3 GPIO_PIN_3#define LED_PIN_4 GPIO_PIN_4void delay(uint32_t n){while(n--);}void main(){GPIO_Init(LED_PORT, LED_PIN_1 | LED_PIN_2 | LED_PIN_3 | LED_PIN_4, GPIO_MODE_OUT_PP_LOW_FAST);while(1){GPIO_WriteHigh(LED_PORT, LED_PIN_1);delay(100000);GPIO_WriteLow(LED_PORT, LED_PIN_1);GPIO_WriteHigh(LED_PORT, LED_PIN_2);delay(100000);GPIO_WriteLow(LED_PORT, LED_PIN_2);GPIO_WriteHigh(LED_PORT, LED_PIN_3);delay(100000);GPIO_WriteLow(LED_PORT, LED_PIN_3);GPIO_WriteHigh(LED_PORT, LED_PIN_4);delay(100000);GPIO_WriteLow(LED_PORT, LED_PIN_4);}}```在这段代码中,我们首先定义了LED连接到的引脚,然后在主函数中初始化这些引脚,并通过循环遍历的方式控制LED的亮灭。
单片机跑马灯的实现原理

单片机跑马灯的实现原理单片机跑马灯是一种常见的电子实验,通过控制单片机的输出引脚来使多个LED 灯按照一定的模式闪烁。
实现原理主要包括硬件和软件两个方面。
硬件方面,需要用到的元器件主要包括单片机、LED灯以及合适的电阻等。
首先,通过电阻将每个LED灯与单片机的输出引脚连接,以限制电流大小,防止LED 灯过电流损坏。
然后,通过单片机的输出引脚控制LED灯的亮灭状态。
在跑马灯的实现中,通常使用一个端口的多个输出引脚来控制多个LED灯,使它们按照一定的顺序依次亮起、熄灭,形成灯的移动效果。
软件方面,通过单片机的编程实现跑马灯的控制。
首先,需要对单片机进行初始化,设置相应的引脚为输出模式。
然后,在主程序中使用循环结构控制LED的亮灭。
通常,会使用一个计数变量来记录当前亮灯的位置,然后根据该位置控制相应的输出引脚控制LED灯的亮灭。
每次循环结束后,将计数变量+1,使下一个LED灯亮起,直至所有LED灯都亮起。
具体实现中,还可以加入延时函数来控制LED灯的亮灭时间,从而调整跑马灯的速度。
延时函数的实现通常通过单片机的定时器来实现,定时器中断发生时,可以触发相应的代码来改变LED灯的状态。
通过调整定时器的定时周期,可以控制跑马灯的亮灭速度。
总结起来,单片机跑马灯的实现原理主要包括硬件和软件两个方面。
在硬件方面,通过电阻将LED灯与单片机的输出引脚连接,使用单片机的输出引脚控制LED 灯的亮灭。
在软件方面,通过单片机的编程实现跑马灯的控制,使用循环结构和计数变量控制LED的亮灭,并可以加入延时函数来控制跑马灯的速度。
通过硬件和软件的协同工作,单片机跑马灯可以实现不同的灯光效果,丰富电子实验的实现。
八路跑马灯程序

八路跑马灯一、实验目的与要求(1)熟悉单片机实验开发装置实验台上的资源,学会选用其功能电路,连接组成实验需要的系统;(2)学习并了解MCS-51单片机P1口的应用及使用方法;(3)学习编写接口应用程序及延时子程序;(4)编写实验程序,实现从P0口输出信号驱动发光二极管L1~L8动态点亮的功能;二、二、实验程序功能延时实现LED流水灯效果,p1端口的八个灯作跑马灯。
在本实验中,P1作为输出口,接8只发光二极管,编写程序,使发光二极管循环点亮。
本例实验主要用到了延时子程序,CLR、AJMP、RRC、RLC、CALL等指令,通过轮流点亮P0.0…..P0.7实现效果。
程序功能:(1)使8个跑马灯从右至左依次点亮点亮;(2)再使跑马灯从左至右依次点亮;(3)一个循环结束后接着按上面的一二步骤循环;三、实验电路原理图及硬件接线图1.1 电路原理图硬件接线:把“单片机系统”区域中的P1.0-P1.7用8芯排线连接到“八路发光二极管指示模块”区域中的L1-L8端口上,要求:P1.0对应着L1,P1.1对应着L2,……,P1.7对应着L8。
四、实验程序○1程序内容ORG 0000HAJMP STARTORG 0030hSTART:MOV A,#0FFHCLR CMOV R1,#08H ;循环八次。
LOOP: RLC A ;带进位左移。
MOV P1,A ;输出到P1口。
CALL DELAY ;延时一段时间DJNZ R2,LOOP ;反复循环MOV R2,#07H ;再往回循环。
LOOP1: RRC A ;带进位右移MOV P1,A ;输出到P1口。
CALL DELAY ;延时一段时间DJNZ R2,LOOP1 ;反复循环JMP START ;重新开始DELAY: MOV R3,#20 ;延时子程序D1: MOV R4, #20D2: MOV R5, #248DJNZ R5, $DJNZ R4, D2DJNZ R3, D1RET○2基本工作原理:我们可以运用输出端口指令MOV P1,A或MOV P1,#DATA,只要给累加器值或常数值,然后执行上述的指令,即可达到输出控制的动作。
atmega48学习教程之1.项目一跑马灯
广州大学自动化系 肖忠
1
一、设计目标
任务一:跑马灯 (LED循环显示)
2
二、典型硬件电路
典型 外围电路 单片机 最小系统
3
二、典型硬件电路
下 载 口
单片机 系统
外围电路
4
三、知识点 1-ATmega48及引脚
正常工作需要: 电源、时钟、复位;
另:23个IO B口:0~7 C口:0~6 D口:0~7
10
三、知识点 6-LED驱动电路
共 阳 极 共 阴 极
11
三、知识点 7-ATmega48IO端口
<1>、端口寄存器及配置
作为通用数字I/O口使用时,每个引脚都具有 3 个寄 存器位: DDRxn PORTxn PINxn
DDRxn PORTxn I/O 输出 输出 输入 输入 上拉电阻 无 无 无 有 说明 输出低电平 输出高电平 高阻态 带上拉的输入
5
三、知识点 2-电源电路
(1)线性电源 降压-整流-滤波-稳压(输出5V直流) (2)开关电源 ----电力电子技术的知识
(3)现成的电源模块—(暂不研究)
6
三、知识点 3-时钟电路
(1)外部晶振电路 XTAL2、XTAL1为10、9 引脚;C1、C2约为22pF; 晶体振荡器为最大为16MHz (2)内部RC,即这部分电路不需要任何外 围器件
1、端口初始化(D为输出); 2、i = 0; 3、若 i < 8 (1) PORTD = ~(1<<i); (2) 延时; (3) i++; 4、goto 2
16
四、软件设计 2-代码1
#include "iom48v.h" /*软件延时函数*/ void delay_ms(unsigned char i) { unsigned char a, b; for (a = 0; a < i; a++) for (b = 1; b; b++ ); }
基于单片机AT89C51的花样跑马灯设计报告
基于AT89C51的花样跑马灯一.课设简介1-1.课设目的为了进一步巩固学习的理论知识,增强学生对所学知识的实际应用能力和运用所学的知识解决实际问题的能力,开始为期两周的课程设计。
通过设计使学生在巩固所学知识的基础之上具有初步的单片机系统设计与应用能力。
1、通过本设计,使学生综合运用《单片机技术原理与应用》、《DSP原理与应用》《C语言程序设计》以及《数字电路》、《模拟电路》等课程的内容,为以后从事电子产品设计、软件编程、系统控制等工作奠定一定的基础。
2、学会使用KEIL C和PROTEUS等软件,用C语言或汇编语言编写一个较完整的实用程序,并仿真运行,保证设计的正确性。
3、了解单片机接口应用开发的全过程:分析需求、设计原理图、选用元器件、布线、编程、调试、撰写报告等。
1-2.课设内容利用单片机的自动控制功能,设计出相应不同的电路,可以实现IED灯不同模式的显示效果。
本课程是利用AT80C51单片机的自动控制功能,并结合其它电子元器件以及软件实现的跑马灯,实现不同种类的LED灯显示效果。
二.硬件电路设计2.1AT89C51简介及接口说明AT89C51是一种带4K字节FLASH存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微处理器,俗称单片机。
AT89C2051是一种带2K字节闪存可编程可擦除只读存储器的单片机。
单片机的可擦除只读存储器可以反复擦除1000次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,AT89C2051是它的一种精简版本。
AT89C51单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
AT89C51引脚排列图由于工艺及标准化等原因,芯片的引脚数量是有限的,但单片机为实现控制所需要的信号数目却远远超过其引脚数目。
八路跑马灯设计报告

西南石油大学课程设计报告书课程名称题目名称专业年级学生姓名指导老师2012年6月28日目录:摘要 (1)课程题目意义 (1)硬件设计及电路图 (2)相关芯片 (4)软件设计 (6)流程图 (8)设计总结 (9)参考文献 (9)八路跑马灯的设计专业年级:应电10 学生姓名:杨江维指导老师:蒲老师摘要:对于51单片机系统来说,实现八路跑马灯是最简单不过的事情了。
对于我们来说跑马灯的实验设计应该是初学者必须掌握的技能,跑马灯由八个并排放置的二极管组成,八路跑马灯由单片机的p1管脚驱动,并由内部程序控制。
课程题目的意义:对于实验本身来说是对我们的动手能力及综合能力的锻炼,从课堂的理论知识迁移到实际操作中来,让我们达到实际操作的要求,为以后步入社会打下一点基础。
对于此课题,是很基础的一个实验。
它可以使我们充分体会单片机的输出管脚的使用方法,加深对它的认识起到了决定性的作用。
同时通过本课程的研究进一步对于单片机编程有一个更深入的认识,懂得什么是软件控制,什么是软件控制。
熟悉单片机的工作原理。
硬件设计及电路图:1、本电路,是利用单片机的中断定时来实现LED灯的闪烁。
控制器STC89C52与我们所学的ATML的单片机AT89C52的内部结构和资源是一样的,内部有8位的CPU处理器包含(运算部件和控制部件),片内有256B的数据存储器和8KB的程序存储器,3个定时器/计数器;六个中断源(两个外部中断源INTO和INT1,两个定时/计数器T0和T1,一个串行口中断)。
四个输出口P0口、P1口、P2口、P3口,LED 的八个灯的控制口由P0口来控制,而采用P3口第二功能且可以在线下载程序,硬件复位端9脚在高电平是单片机复位。
由于本次设计未用到其他内部资源所以就不过多的去分析。
(下附STC89C52单片机引脚图)相关芯片:D 0--D 7VCC 40P0.0/AD039P1.0/T11P0.1/AD138S T C 89C 52P0.2/AD237P3.0/RXD 10P0.3/AD336P3.1/TXD 11P0.4/AD435P3.2/INT012P0.5/AD534P3.3/INT113P0.6/AD633P3.4/T014P0.7/AD732P3.5/T115P1.1/T2EX 2P3.6/WR 16P1.23P3.7/RD 17P1.34VSS20P1.45ALE 30P1.56PSEN 29P1.67EA/VPP 31P1.78R ST/Vp d 9P2.0/A821XTAL218P2.1/A922XTAL119P2.2/A1023P2.7/A1528P2.3/A1124P2.6/A1427P2.4/A1225P2.5/A13263、Max232产品是由德州仪器公司(TI )推出的一款兼容RS232标准的芯片。
iar编写stm8跑马灯
iar编写stm8跑马灯
【原创版】
目录
1.IAR 编写 STM8 跑马灯简介
2.STM8 跑马灯的工作原理
3.IAR 编写 STM8 跑马灯的步骤
4.IAR 编写 STM8 跑马灯的注意事项
5.总结
正文
1.IAR 编写 STM8 跑马灯简介
IAR 是瑞典的一家公司,专注于嵌入式系统开发,提供软件、硬件和在线服务。
STM8 跑马灯是一款基于 IAR 嵌入式系统的跑马灯应用,通过编写代码实现跑马灯的各种功能。
2.STM8 跑马灯的工作原理
STM8 跑马灯的工作原理是通过编写 IAR 代码,控制单片机的输出,使跑马灯的各个 LED 灯珠按照预定的顺序和速度进行闪烁。
通过调节IAR 代码中的参数,可以实现跑马灯的不同效果。
3.IAR 编写 STM8 跑马灯的步骤
(1)准备硬件:STM8 单片机、跑马灯、杜邦线、电源等。
(2)编写代码:使用 IAR 嵌入式开发环境,编写代码实现跑马灯的功能。
(3)烧录程序:将编写好的代码烧录到 STM8 单片机中。
(4)测试运行:连接电路,给单片机供电,观察跑马灯效果。
4.IAR 编写 STM8 跑马灯的注意事项
(1)在编写代码时,需要注意代码的规范性,遵循 IAR 编程规范。
(2)在烧录程序时,要确保单片机的引脚连接正确,避免引脚接错导致跑马灯效果异常。
(3)在测试运行时,要注意观察跑马灯的效果,如发现问题,需要及时调整代码。
5.总结
IAR 编写 STM8 跑马灯是一项有趣的嵌入式应用开发任务,需要掌握基本的 IAR 编程知识和硬件连接技巧。
单片机多模式带乐跑马灯研发设计方案文档
高等教育自学考试毕业论文学生姓名:黎政昌考籍号:911411101567专业年级:二年级题目:基于单片机的多模式带音乐跑马灯设计指导教师:向诚评阅教师:2012年4月目录1设计的作用、目的 (3)2设计的具体实现 (3)2.1系统概述 (3)2.2单元电路设计与分析 (3)2.3电路的安装与调试 (8)3建议 (9)结论 (10)致谢 (11)参考文献 (12)4附录 (13)摘要跑马灯,顾名思义,就是“会像马儿一样跑动”的小灯,故取名“跑马灯”。
跑马灯在单片机系统中一般是用来指示和显示单片机的运行状态,一般情况下,单片机的跑马灯由多个LED发光二极管组成。
在单片机运行时,可以在不同状态下让跑马灯显示不同的组合,作为单片机系统正常的指示。
当单片机系统出现故障时,可以利用跑马灯显示当前的故障码,对故障做出诊断。
此外,跑马灯在单片机的调试过程中也非常有用,可以在不同时候将需要的寄存器或关键变量的值显示在跑马灯上,提供需要的调试信息。
关键词跑马灯;单片机;LED发光二极管1设计的作用、目的(1)使用32个彩色LED灯,用这32个发光二极管以不同的模式循环点亮;(2)三个功能键,K1模式键,通过按键调整显示结果,总共有十种模式;K2加速键;K3减速键;(3)当撤换最后一个功能模式时,蜂鸣器将会播放音乐,此时LED将当作音频灯使用;(4)十种模式通过一个共阳数码管显示出来,十个模式分别显示为0~9。
通过发光二极管的动态闪亮,显示非常炫目的效果,应用于各种建筑物,大楼,酒吧,KTV,夜总会等娱乐场所,拖尾灯,以及各种休闲娱乐场所用的动态灯光显示,通过此次设计,可以加深对51单片机的应用、C51编程和protues 软件操作的能力。
了解51单片机的外围引脚,以及各个端口的功能,还可以通过对走马灯的程序编写让我们对程序的执行方式和特点有一个初步的认识,同时掌握C51软件与protues 联机调试程序,对进一步学习单片机打下坚实基础。
ATmega8-Protues仿真之二 LED 数码管
第二讲 LED数码管的学习提要:主要学习Atmega8通用数字I/O接口控制LED数码管的应用。
2.1 I/O口的结构及特点:Atmega8有23个I/O引脚,分成3个8位的端口B、C和D,其中C口只有7位。
I/O端口作为通用数字输入/输出口使用时,都具备真正的读-修改-写(R-M-W)特性。
每个I/O引脚采用推挽式驱动,不仅能提供大电流的输出驱动,而且也可以吸收20mA的电流,因而能直接驱动LED显示器。
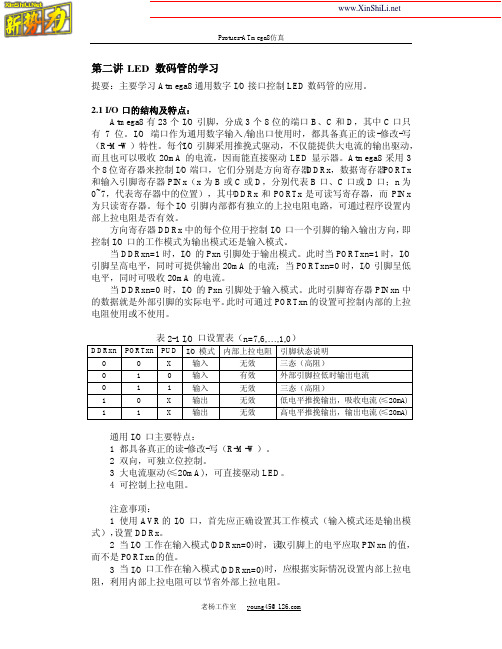
Atmega8采用3个8位寄存器来控制I/O端口,它们分别是方向寄存器DDRx,数据寄存器PORTx 和输入引脚寄存器PINx(x为B或C或D,分别代表B口、C口或D口;n为0~7,代表寄存器中的位置),其中DDRx和PORTx是可读写寄存器,而PINx 为只读寄存器。
每个I/O引脚内部都有独立的上拉电阻电路,可通过程序设置内部上拉电阻是否有效。
方向寄存器DDRx中的每个位用于控制I/O口一个引脚的输入输出方向,即控制I/O口的工作模式为输出模式还是输入模式。
当DDRxn=1时,I/O的Pxn引脚处于输出模式。
此时当PORTxn=1时,I/O 引脚呈高电平,同时可提供输出20mA的电流;当PORTxn=0时,I/O引脚呈低电平,同时可吸收20mA的电流。
当DDRxn=0时,I/O的Pxn引脚处于输入模式。
此时引脚寄存器PINxn中的数据就是外部引脚的实际电平。
此时可通过PORTxn的设置可控制内部的上拉电阻使用或不使用。
表2-1 I/O口设置表(n=7,6,…,1,0)DDRxn PORTxn PUD I/O模式内部上拉电阻引脚状态说明0 0 X 输入无效三态(高阻)0 1 0 输入有效外部引脚拉低时输出电流0 1 1 输入无效三态(高阻)1 0 X 输出无效低电平推挽输出,吸收电流(≤20mA)1 1 X 输出无效高电平推挽输出,输出电流(≤20mA)通用I/O口主要特点:1 都具备真正的读-修改-写(R-M-W)。
跑马灯效果的实现
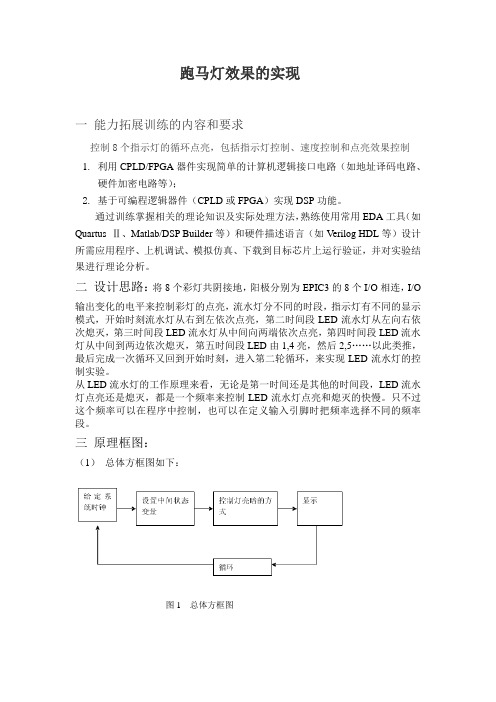
跑马灯效果的实现一能力拓展训练的内容和要求控制8个指示灯的循环点亮,包括指示灯控制、速度控制和点亮效果控制1.利用CPLD/FPGA器件实现简单的计算机逻辑接口电路(如地址译码电路、硬件加密电路等);2.基于可编程逻辑器件(CPLD或FPGA)实现DSP功能。
通过训练掌握相关的理论知识及实际处理方法,熟练使用常用EDA工具(如Quartus Ⅱ、Matlab/DSP Builder等)和硬件描述语言(如Verilog HDL等)设计所需应用程序、上机调试、模拟仿真、下载到目标芯片上运行验证,并对实验结果进行理论分析。
二设计思路:将8个彩灯共阴接地,阳极分别为EPIC3的8个I/O相连,I/O输出变化的电平来控制彩灯的点亮,流水灯分不同的时段,指示灯有不同的显示模式,开始时刻流水灯从右到左依次点亮,第二时间段LED流水灯从左向右依次熄灭,第三时间段LED流水灯从中间向两端依次点亮,第四时间段LED流水灯从中间到两边依次熄灭,第五时间段LED由1,4亮,然后2,5……以此类推,最后完成一次循环又回到开始时刻,进入第二轮循环,来实现LED流水灯的控制实验。
从LED流水灯的工作原理来看,无论是第一时间还是其他的时间段,LED流水灯点亮还是熄灭,都是一个频率来控制LED流水灯点亮和熄灭的快慢。
只不过这个频率可以在程序中控制,也可以在定义输入引脚时把频率选择不同的频率段。
三原理框图:(1)总体方框图如下:图1 总体方框图(2)细化框图:此次实验主要分两个大模块:控制模块以及功能模块,其中功能模块还有3个子模块,如下所示:图2 细化框图控制模块:主要是通过控制给定系统的时钟频率,可以改变灯亮暗的快慢。
功能模块:即为灯亮暗方式的选择。
四编写程序并仿真第一种方式波形图如下:图3第一个灯开始亮由上述仿真波形可知,仿真后所得的结果与希望的相同,进行下一步:对引脚的锁定。
图4 从左到右依次亮图5 从右向左依次熄灭第二种方式波形图:图6中间两个灯亮图7向两边扩散开来直至全亮图8从两边向中间熄灭第三种方式波形图:图91、4灯亮图101、4;2、5;3、6亮图11全亮后进入下一轮循环五引脚锁定以及功能预测各引脚锁定如下所示:图4 各引脚锁定图功能预测:当引脚锁定完成之后,再编译一次,然后进行下载,当下载完毕后可以发现试验箱上的灯会从左到右依次被点亮,然后又从右向左依次熄灭,之后灯从中间两个开始亮,向两边开始扩散,直至全亮后再从两边向中间逐次熄灭,然后就是灯会以1,4亮,2,5亮,3,6亮,4,7亮此种方式进行,当此次全亮之后,灯开始进入下一轮循环,从左到右依次点亮……如此反复。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
跑马灯
atmega8有三种定时方式,其中方式0和方式2为8位定时器,方式1为16位定时器。
本程序采用定时器1,外部晶振作为时钟驱动,使T/C1工作在普通模式,在此模式下计数器不停的累加,计数到最大值(TOP=0xffff)由于数值溢出计数器简单地返回到最小值0x0000重新开始。
在TCNT1为零的同一个定时器时钟里T/C溢出标志TOV1置位,进入中断程序,定时器终端服务程序能够自动清零TOV1。
为了观察方便设定1S进行一次中断,故要对TCNT1进行初始化。
初值的计算:
因为使用的是16位定时计数器,晶体振荡器的频率位1MHZ,
1,分频数为1024定时为1S,所以单片机机器周期为T=
/f
1024
f=1MHZ,令初值为X,则(216-X)T=1S,得初值X为FC2F。
跑马灯工作过程:
首先T/C1初始化并确定计时初值,开启中断即分频数的设置,然后允许T/C1中断,开启全局中断使能SREG,T/C1从初值0XFC2F 开始计数,一直到0XFFFF,再到0,溢出,进入中断服务程序D8点亮,然后回到循环重新从初值开始计数直到溢出点亮D1,这样D8到D1依次点亮,i>7时回到D8,一直循环点亮,形成跑马灯。
如下为跑马灯程序流程图
具体程序如下:
#include <mega8.h>
// 16位定时计数器,晶体振荡器的频率位1MHZ
unsigned char i=0x00;
void timer(void)//定时器初始化1
{
TCCR1B=0x00;//P92,TCCR1B的低3位设置分频数,000表示停止
TCCR1B=0x05;//P92,TCCR1B的低3位设置分频数,101表示1024分频
//(65536-M)(N/f_sys)=t,t=1s, N=1024, f_sys=1M, M=64559=0xfc2f
TCNT1H=0xFC;//为led灯设置为1秒亮,初始地址为FC2F TCNT1L=0x2F;
}
interrupt[9] void timer_ovf_isr(void)
{
TCNT1H=0xFC; //为led灯设置为1秒亮,初始地址为FC2F TCNT1L=0x2F;
PORTD=0x01<<i; //每次进入中断就点亮一盏灯
DDRD=0xFF;
i++;
if(i>7)
{i=0x00;} //最多能移动7位
}
void main(void)
{
timer();
TIMSK=0x04; //P94,允许T1溢出中断
SREG=0x80; //全局中断使能,也可使用#asm("sei")
while (1)
{
};
}
如下为Proteus跑马灯仿真电路图。