TZ400海洋钻井平台关节式抓管机试验研究
海洋钻机井架技术现状及发展趋势分析
海洋钻机井架技术现状及发展趋势分析1. 引言1.1 海洋钻机井架技术现状及发展趋势分析海洋钻机井架技术是海洋石油勘探和开发中至关重要的一环,它承载着钻井设备、支撑平台结构以及输送井下原油等功能。
随着海洋石油资源的逐渐枯竭和深水勘探开发的加速推进,海洋钻机井架技术的发展日益受到关注。
海洋钻机井架技术历史悠久,经过多年的发展演变,从最初简单的钻机台到现代化高度自动化的钻井平台,技术不断进步。
其主要特点包括结构复杂、操作安全要求高、抗风浪能力强等。
海洋钻机井架技术广泛应用于深水、超深水油气田勘探和开发中,对于提高钻井效率、减少事故风险具有重要意义。
随着石油资源勘探深度和海域条件的不断变化,海洋钻机井架技术也在不断创新和完善。
未来,海洋钻机井架技术将继续向更高效、更智能化、更环保化的方向发展。
面临的挑战也日益凸显,需要不断创新技术、提升管理水平,以适应不断变化的市场需求和环境要求。
海洋钻机井架技术的发展将在未来能持续推动海洋石油行业的发展,为我国能源安全做出贡献。
2. 正文2.1 海洋钻机井架技术的历史演变海洋钻机井架技术的历史演变可以追溯到20世纪初。
最初,海洋油气勘探主要依靠陆地钻探,在海洋领域的探索相对较少。
随着陆地资源逐渐枯竭和海洋技术的进步,人们开始将目光转向海洋深处的石油资源。
1930年代,最早的海洋钻机井架出现在美国湾流海洋平台,起初采用简单的木质结构搭建而成。
随着技术的不断发展,海洋钻机井架逐渐实现了由木结构向钢结构的转变,提高了安全性和稳定性。
20世纪60年代,随着深水钻井技术的推广,海洋钻机井架的设计和建造进入了全新阶段。
从传统的固定式平台到半潜式和全潜式钻井平台,再到风力涡轮机平台和深水浮式生产系统等,海洋钻机井架技术不断创新,逐渐走向多元化和多功能化。
近年来,随着全球石油资源的日益枯竭和环保意识的增强,海洋钻机井架技术也在不断发展。
先进的数字化技术、智能化系统的应用,为海洋钻机井架的运行和管理带来了全新的挑战和机遇。
海洋钻机井架技术现状及发展趋势分析

海洋钻机井架技术现状及发展趋势分析海洋钻机井架技术是海上石油及天然气开发过程中至关重要的装备之一。
其作用是在海上的钻井平台上起到稳定平衡的作用,保证钻井的顺利进行。
随着深海石油开发的不断深入,海洋钻机井架技术正面临着越来越高的技术要求。
本文针对海洋钻机井架技术现状及发展趋势进行分析。
一、现状分析1.1传统的海洋钻机井架传统的海洋钻机井架由柱型构成,主要有腿柱式和桥式两种形式。
腿柱式井架主要由四条直挺支撑腿构成,通常能够满足水深400米以下的海洋钻探需求;桥式井架则是通过桥架连接支撑腿完成整个井架的搭建。
这种井架更为适合水深400-1500米的海上钻探。
这种传统的井架技术具有成熟的现成技术和较为确定的技术方案,但同时也存在一定的不足。
传统的井架结构臃肿、尺寸大,往往需要数万吨重的重型起重设备进行安装调试,建造周期较长,且在海洋环境中经受长年紫外线、海水腐蚀等自然衰减作用。
1.2深海井架为满足深海石油开发的要求,深海井架技术应运而生。
它是针对传统井架的缺陷而推出的新一代井架,具有井架结构轻巧、人员安装配置更加简单、操作更加灵活等优势。
深海井架主要采用夹层式结构,利用薄壳结构和核心筒的排列组合形成稳定的三角柱。
这样的结构相对于传统井架有重量轻、初装成本低、建造周期短等优势。
然而,深海井架所采用的夹层式结构也使其受到很多限制,如难以增加井架尺度、钢材需求量大、燃油需求量多等。
此外,如何解决海洋环境中的材料稳定性和安全性也是未来深海井架技术需要解决的问题之一。
二、发展趋势2.1 硬化风险管理随着深海石油开发的深入,海洋钻机井架所面临的风险也越来越高。
海洋环境下暴风雨和飓风的侵袭,以及海况变化的强烈振动都会对海洋钻机井架的安全构成直接威胁。
这就要求海洋钻机井架技术的发展趋势必须更为注重风险管理,采取一系列措施优化井架结构,提高设备的韧性和抗风险能力,确保安全稳定运行。
2.2 智能化与自动化近年来,随着信息技术的发展,智能化越来越成为井架行业的趋势。
海洋工程石油钻井平台井架资料

海洋钻机井架简介海洋石油平台钻井包Drilling package,钻井设备这一块,在整个海洋平台的费用上占几乎一半的价格,利润非常可观,而井架结构Derrick 是此其中的一部分,国内新的钻井平中,以都是国司给的设计,其中我们熟的两内新造的钻井平台中,有80%以上都是国外公司给的设计,这其中有我们熟悉的两大巨头,NOV 和AKER,国内宏华,宝石,TSC。
钻井设备,它含括了井架、钻具、提升装置、旋转装置、钻杆&套管&隔水管操纵装置、泥浆处理装置、控制监测装置、油井测试装置、固井完井装置、井口装置、补偿装置、安全装置、……等。
井架补偿装置安全装置等井架结构Derrick,井架承担了钻井过程中所有钻杆的提升重量,同时它又给钻井提升装置,Crown block,Traveling block ;旋转装置Top driver ,以及立管装置stand finger board,belly board,提供了安装位置。
提供了安装位置井架的发应钻井包商的求断发期水较浅井架多为井架Derrick的发展是应钻井承包商的要求而不断发展,早期水深较浅井架多为塔型,随着水深提高,为了存放更多的钻具必须加大二层台的宽度,井架由原来的塔式转变为酒瓶式,20世纪末为了减少深水钻井每日巨大的费用,因而提出双联井架钻井系统的概念井系统的概念。
双井架BP thunderhorseBP thunderhorse单井架Eirik_Raude第六代深水半潜式钻井平台用钻机从结构形式分主要有3种:单井架钻机(Single Rigs 深水半潜式钻井平台用钻机介绍第六代深水半潜式钻井平台用钻机从结构形式分主要有3 种: 单井架钻机( Single Rigs or Conventional Rigs) 、离线钻机(Offline Rigs ), 译为离线钻机或并行作业钻机) 和双井架钻机(Dual Derrick Rigs) 。
海洋石油钻井平台钻井井架应用和发展分析
2.4一个半塔
通过在单个井架的基础上使井架的一侧膨胀以形成半井架结构以获得更好的井架空间来形成半塔结构,并且额外的空间可以用作预钻柱。减少海上石油钻井阶段的准备时间,从而有效提高海上石油钻井平台的钻井效率。半井架的形式现在用于自升式平台和半潜式平台。通过试验和比较,相对于传统的井架形式,使用半井架可以将井架操作的效率提高约17%。。随着海上石油钻井平台的钻井平台增加了预钻柱的面积,钻井井架跨度和钻井平台面积相应增加,重量也逐年增加。
2.5双联井架
双联井架主要使用两个单井架之间存在的空间。两套游泳系统充分去对两个井口共同操作给予实现。一个提升系统主要是使用比较低的正常钻井操作,另一个提升系统主要使用一个相对比较慢的提升以及减少提升管以及防喷器。双井架具有极其广泛的应用范围,与传统井架相比其能够家操作的效率提升到大概23%。
3海上石油钻井平台钻井井架的发展趋势
鉴于海上石油钻井井架的重要作用,新技术的引进和应用应该能够开发和应用海上石油钻井井架钻井。在海上石油钻井平台钻井井架的开发中,应积极进行自升式井架的结构加固和优化,以便在深海甚至深海钻井中得到很好的应用。同时,塔架可以预先连接到钻柱上,使其可以获得半塔的功能,这样可以利用小跨度和轻量化,减轻重量,同时改善海上石油钻井平台钻井井架的效率。积极开发新的箱式井架,充分利用其结构特征,引入新技术进行优化。做好自动管道处理系统的开发和应用。
海洋石油钻井平台钻井井架应用和发展分析
海洋石油钻井平台钻井井架应用和发展分析海洋亟待开发的大宝盆,我国有着漫长的海岸线和广阔的领海,做好海洋石油资源的勘探和开发对于确保我国的油气资源的供应有着十分重要的意义。
现今在海洋石油资源的开发中已经从近海资源开发向远海深海领域方向发展。
海洋钻井逐渐由原先的1000-3000m的浅井向着万米以上的深井方向发展。
海洋石油钻井平台是海洋油气资源开采的主要设备,在海洋石油钻井平台上井架是其中最主要也是最重要的设备之一,相较于陆上石油开采中所使用的井架,海洋石油钻井平台上所使用的井架结构复杂程度更高、其对工作的可靠性要求也越高。
随着科技的进步以及海洋石油钻井平台发展需求的增加海洋石油钻井平台上的井架也在不断的发展进步,其在结构形式上通过不断的发展创新使得其能够更好的满足海洋石油钻井的工作需求。
文章在分析海洋石油钻井平台上使用较多的几种钻机井架的基础上对海洋石油钻井平台钻机井架未来的发展趋势进行了分析阐述。
标签:海洋石油钻井平台;井架;应用;发展趋势前言石油资源是“工业的血液”同时也是现代文明发展的重要基石,随着经济的快速发展我国对于石油资源的需求与日俱增,但是可惜的是我国陆上石油资源较为紧缺,相较于国外石油丰富的国家陆上油气资源的开采量远远无法满足需求。
我国海洋面积广阔,据不完全统计,现今已经探明的油气资源中分布于海洋中的油气资源占据探明储量的约34%左右。
因此,做好海洋石油资源的勘探与开采是现今乃至今后一段时间油气资源勘探开采的重点。
在海洋石油资源的勘探开中海洋石油钻井平台是其中必不可少的装备,而钻井井架作为海洋石油钻井平台上的重要设备之一其设计及结构是否合理对于海洋石油钻井平台的开采效率及开采的安全性有着极为重要的意义。
1 钻井井架在海洋石油钻井平台上的重要意义海洋石油钻井平台上的钻井井架主要用来安装天车、钻井井架的附件以及存放立跟等。
在钻井井架工作的过程中其需要悬挂游车、大钩、钻具等,钻井井架会承受相当重的载荷,因此在海洋石油钻井平台钻井井架的设计过程中需要确保其能够承受相当重量的载荷,且具备一定的作业空间。
某自升式钻井平台精就位作业方案探讨
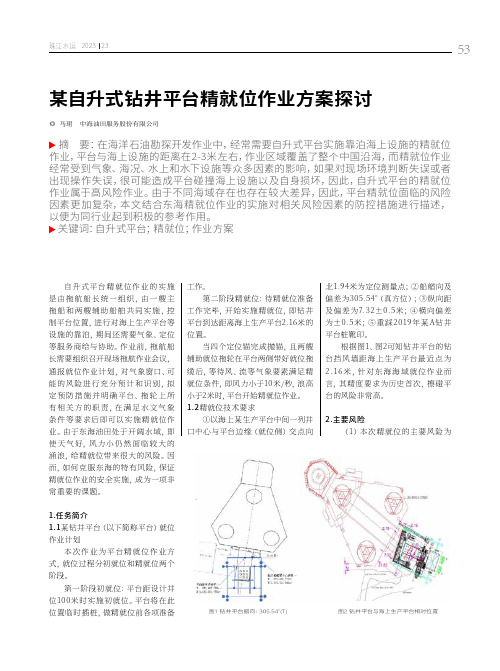
某自升式钻井平台精就位作业方案探讨◎ 马珺 中海油田服务股份有限公司摘 要:在海洋石油勘探开发作业中,经常需要自升式平台实施靠泊海上设施的精就位作业,平台与海上设施的距离在2-3米左右,作业区域覆盖了整个中国沿海,而精就位作业经常受到气象、海况、水上和水下设施等众多因素的影响,如果对现场环境判断失误或者出现操作失误,很可能造成平台碰撞海上设施以及自身损坏,因此,自升式平台的精就位作业属于高风险作业。
由于不同海域存在也存在较大差异,因此,平台精就位面临的风险因素更加复杂,本文结合东海精就位作业的实施对相关风险因素的防控措施进行描述,以便为同行业起到积极的参考作用。
关键词:自升式平台;精就位;作业方案自升式平台精就位作业的实施是由拖航船长统一组织,由一艘主拖船和两艘辅助船舶共同实施,控制平台位置,进行对海上生产平台等设施的靠泊,期间还需要气象、定位等服务商给与协助。
作业前,拖航船长需要组织召开现场拖航作业会议,通报就位作业计划,对气象窗口、可能的风险进行充分预计和识别,拟定预防措施并明确平台、拖轮上所有相关方的职责,在满足水文气象条件等要求后即可以实施精就位作业。
由于东海油田处于开阔水域,即使天气好,风力小仍然面临较大的涌浪,给精就位带来很大的风险。
因而,如何克服东海的特有风险,保证精就位作业的安全实施,成为一项非常重要的课题。
1.任务简介1.1某钻井平台(以下简称平台)就位作业计划本次作业为平台精就位作业方式,就位过程分初就位和精就位两个阶段。
第一阶段初就位:平台距设计井位100米时实施初就位。
平台将在此位置临时插桩,做精就位前各项准备工作。
第二阶段精就位:待精就位准备工作完毕,开始实施精就位,即钻井平台到达距离海上生产平台2.16米的位置。
当四个定位锚完成抛锚,且两艘辅助就位拖轮在平台两侧带好就位拖缆后,等待风、流等气象要素满足精就位条件,即风力小于10米/秒,浪高小于2米时,平台开始精就位作业。
中船“400英尺自升式钻井平台开发研究”通过验收
中船“400英尺自升式钻井平台开发研究”通过验收中船集团的“400英尺自升式钻井平台开发研究”项目近日通过了验收。
这是中国在海洋工程领域取得的重要突破,标志着中国在海洋工程技术上迈出了坚实的一步。
钻井平台是海洋工程关键设备之一,它主要用于在海底进行石油、天然气等资源的勘探和开采工作。
由于海底环境的复杂性,特别是深海环境的恶劣条件,对钻井平台的要求非常高。
自升式钻井平台是一种适用于深海环境的钻井设备,其具有自升降能力,能够适应不同深度的海域。
该项目的研究目标是开发一种能够适应400英尺水深的自升式钻井平台。
研究小组经过多年的努力,克服了水下工程的种种难题,最终成功研制出了符合国际标准、具备自主知识产权的自升式钻井平台。
通过验收,意味着该项目的研究成果达到了预期目标,具备实际应用的能力。
该钻井平台在性能方面具有较高的综合水平,能够满足400英尺水深下钻井的要求。
同时,该平台还具备防风、防浪等安全保障措施,能够应对海洋恶劣环境的挑战。
该项目的通过验收对中国的海洋工程技术发展具有重要意义。
一方面,该平台的研发为我国勘探和开采海洋资源提供了技术支持,为国家能源安全做出了贡献。
另一方面,该项目的研发成功也标志着中国在海洋工程领域的技术实力已经达到了国际先进水平,将有助于提高中国在国际市场上的竞争力。
此外,该项目的推动还起到了技术创新的促进作用。
研制过程中,研究团队克服了许多技术挑战,积累了丰富的经验和专业知识。
这些经验和知识的积累将为我国在海洋工程领域的研发工作提供重要的参考和支持,有助于推动我国海洋工程技术的进一步发展。
总之,“400英尺自升式钻井平台开发研究”项目的通过验收是中国海洋工程技术发展的重要里程碑。
这不仅为我国在深海勘探和开采领域提供了重要支持,还标志着我国在海洋工程领域的技术实力已经达到了国际先进水平。
希望今后能够有更多类似的研究项目取得成功,为中国海洋事业的快速发展贡献更多力量。
海洋钻机井架技术现状及发展趋势分析

海洋钻机井架技术现状及发展趋势分析海洋钻机井架是海洋石油开发中重要的工具和设备,它被用于在海底进行钻井作业,是实现海洋石油开发的关键技术之一。
本文将对海洋钻机井架的技术现状进行分析,并探讨其未来的发展趋势。
一、海洋钻机井架技术现状海洋钻机井架技术是由陆上钻机技术发展而来的,在过去几十年中得到了飞速发展。
目前,海洋钻机井架主要有固定式井架和浮动式井架两种类型。
固定式井架多用于浅海钻井作业,它通过将井架的支柱固定在海床上来保持井架的稳定性,结构简单可靠,适用于海底较浅的地区。
固定式井架的使用受到水深和海床情况的限制,无法适应深水和坚硬海床的钻井作业需求。
浮动式井架采用具有浮力的船体作为钻井平台,通过船体上的起重机将钻机和井架设备放置在海底。
浮动式井架具有较好的适应性,可以适应不同水深和不同海床情况下的钻井作业,它是目前海洋钻机井架的主要发展方向。
二、海洋钻机井架技术发展趋势1. 深水作业能力提升随着海洋石油开发的不断推进,对于深水区的资源开发需求也越来越大。
未来海洋钻机井架的发展将主要集中在提升深水作业能力方面,通过优化井架结构和使用更先进材料,使其满足更深水域的钻井作业需求。
2. 海上风电的应用随着海上风电的快速发展,海洋钻机井架的技术也将应用于海上风电的建设和维护中。
海上风电的基础设施建设需要使用钻井技术进行打桩作业,而海洋钻机井架具有适应海洋环境和钻井需求的优势,可以为海上风电提供技术支持。
3. 自主化和智能化发展未来海洋钻机井架的发展将趋向于自主化和智能化,通过引入自动化控制和机器人技术,实现钻井作业的自动化和智能化,提高作业效率和安全性。
4. 跨区域合作与技术交流海洋钻机井架的生产和使用需要跨国合作和技术交流,未来将加强国际合作,通过共享经验和资源,促进钻井技术的发展,并实现对全球范围内深水油气资源的有效开发。
三、结论海洋钻机井架是海洋石油开发不可或缺的关键技术之一。
目前,海洋钻机井架技术已经取得了重要的进展,但仍面临一些挑战,如深水作业能力不足、自主化和智能化程度较低等。
海洋钻井平台折臂式抓管机设计与试验研究
Abstract: The knuckle boom pipehandler, the key equipment for pipe handling, is an automated, intelli⁃
gent high⁃end equipment product, of which the technology has long been dominated by foreign developed coun⁃
Key words: drilling platform; knuckle boom pipehandler; structural design; performance test; hanging
claw; pipe
业环境恶劣, 需要考虑多种外界环境载荷, 如平台
0 引 言
随波浪运动产生的垂直及水平方向上的加速度载荷
Design and Test of Knuckle Boom Pipehandler
Wang Dingya 1,2 Hu Baomin 1 Hui Xiaoying 1,2 Wang Lu 1 Qiao Xiaofeng 1,2
(1 CNPC Baoji Oilfield Machinery Co , Ltd ; 2 National Engineering Research Center for Oil and Gas Drilling Equipment)
tries In view of this, the knuckle boom pipehandler for offshore drilling platform has been designed and perform⁃
ance tested The knuckle boom pipehandler takes hanging claw as clamp with the function of gripping, pressing,
海洋钻井平台高强钢桩腿齿条双机器人双弧立焊系统

海洋钻井平台高强钢桩腿齿条双机器人双弧立焊系统杨乘东1 陈玉喜1 陈泽斌1 张华军2 陈善本1(1.上海交通大学,上海200240;2.上海振华重工(集团)股份有限公司,200125)摘要:本文建立了海洋钻井平台高强钢桩腿齿条双机器人双弧立焊系统,该系统可以在主机器人打底焊完成后实现双机器人双面双弧同时填充坡口,试验用Q345钢作为焊接试板,结果表明该系统打底焊可以完全焊透,侧壁熔合良好,填充时能得到良好的焊缝成形,为海洋钻井平台高强钢桩腿齿条的焊接提供高效、稳定的焊接方法。
关键词:钻井平台桩腿齿条双机器人双弧立焊焊枪角度0前言能源是国家发展和安全最重要的决定因素,随着陆地上石油资源长期大量的开采,陆上能源面临着日趋枯竭的危机,而近海能源储量却非常丰富,未来能源开发的重心将由陆地向近海转移。
海洋钻井平台作为近海石油和天然气开采的主要设备,桩腿是自升式钻井平台的重要构件之一,钻井平台的升降依靠桩腿上的齿条实现,桩腿齿条的高强钢对接焊是升降式钻井平台制作的重点和关键。
钻井平台齿条钢材料为Q690钢,板厚150~170mm,目前针对桩腿齿条的焊接主要采用手工电弧立焊,焊接时采取先焊接正面坡口、从反面碳弧气刨清根、刨槽、打磨、探伤、再预热、背面焊接等制作工艺。
工序多,产品的质量稳定性差,一次焊接合格率低,返工量大,生产周期长,生产效率低,并且工人劳动强度大,生产环境恶劣[1~2]。
针对目前桩腿齿条焊接生产效率低下,人工焊接难以保证焊接质量等问题,寻找高效的焊接方法以及实现机器人自动化焊接是有效的解决方法。
1双机器人双弧立焊系统的构成建立的双机器人双弧立焊系统如图1所示,系统中主要包含协调控制中心、集中控制器、两台工业机器人(KUKA机器人和ABB机器人)、两台KEMPPI 焊接电源(Pulse 450和ProMIG540R ) 、KUKA机器人控制柜、ABB机器人控制柜以及焊接工装夹具。
两台工业机器人与焊机之间均通过DeviceNet实现通讯,集中控制器可以控制双机器人的起弧和熄弧,在KUKA主机器人完成打底焊之后,实现双机器人双面双弧同时填充。
海洋钻井平台自动抓管吊机机械臂的方案设计及分析
海洋钻井平台自动抓管吊机机械臂的方案设计及分析【摘要】以海洋钻井平台自动抓管吊机为研究对象,根据它的实际受力,建立了其静力学模型,并考虑其抗倾覆稳定性,确定六种机械臂的实际设计方案。
运用有限元分析得到自动抓管吊机在静力学分析中的各项参数,比较得出结果,确定海洋平台钻机自动抓管吊机的机械臂的设计方案。
【关键词】海洋钻井平台自动抓管吊机机械臂有限元分析1 前言不断增加的油气资源需求量,使石油工业将注意力转向海洋,同时也包括海洋钻井平台自动化操作系统。
自动抓管吊机(Automatic Grabbing Crane)是针对钻台以下、平台以上的钻杆进行自动化处理[1],实现钻杆在钻杆盒和动力猫道之间的传送。
2 AGC机构简化模型描述自动抓管吊机如图1所示。
该机构由基座、内臂、中间臂、外臂和末端的机械手组成。
AGC工作时由液压缸将内臂、中间臂和外臂依次撑开,旋转基座将机械手移动到钻杆盒位置,然后由液压缸控制机械手抓取钻杆;再旋转基座,液压缸控制机械臂和机械手将钻杆释放于动力猫道上。
同时也可进行反向操作,将钻杆从动力猫道上抓取,回放于钻杆盒中[3]。
AGC的基座需要考虑其抗倾覆稳定性,即机构整体在自重和外载荷作用下抵抗翻到的能力。
目前共有三种校核方法:力矩法、稳定系数法和按临界倾覆载荷标定额定起重量。
a.力矩法:基本原则是作用于起重机上包括自重在内的各项载荷对危险倾覆边的力矩代数和必须大于或至少等于零,即。
b.稳定系数法:AGC所受的各种外力对倾覆边产生的稳定力矩与倾覆力矩的比值为稳定系数。
稳定系数不小于规定值:工作状态考虑附加载荷的载重稳定系数为1.15;工作状态不考虑附加载荷的载重稳定系数为1.4;自重稳定系数为1.15。
c.按临界倾覆载荷标定额定起重量:临界倾覆载荷即通过实验或计算,得出的抓管机在不同幅度下达到倾覆临界状态时的起升载荷。
将其打一折扣后,作为额定起升载荷。
折扣越大,抗倾覆稳定性裕度越大,英、德、日、美折扣数分别为:66%,75%,78%,85%。
海洋平台折臂抓管机多工况参数化结构分析

海洋平台折臂抓管机多工况参数化结构分析乔晓锋;栾苏;粟京;袁浩;惠晓英;王学义;宋志刚【摘要】在ANSYS WORKBENCH 环境下对海洋平台抓管机进行整体参数化建模,通过改变主臂、折臂的工作角度,获得多工况下折臂抓管机的工作姿态。
在进行结构分析时,对任一工作半径下折臂抓管机垂直起吊路径进行工况抽样,考虑环境载荷、吊臂自重、额定工作载荷,对折臂抓管机整体进行有限元强度分析,获得多工况下关键零件及关键节点的应力应变分析结果。
实现了折臂抓管机整体强度分析的快速高效计算。
%Parameterized-model was established for the whole knuckle boom pipe crane of offshore platform by ANSYS WORKBENCH ,and multi-attitudes was obtained by changing the boom and knuckle boom lifting angle.During the analysis of structure,some attitudes of the knuckle boom pipe crane on any lifting radius were sampled to calculate entire strength by considering environ-mental loads,boom weight,rating load to achieve stress and strain results of all key parts and nodes by finite element analysis.A quick-efficient analysis of entire strength for knuckle boom pipe crane was achieved.【期刊名称】《石油矿场机械》【年(卷),期】2014(000)003【总页数】5页(P52-56)【关键词】海洋平台;折臂抓管机;多工况;参数化;结构分析;整体强度【作者】乔晓锋;栾苏;粟京;袁浩;惠晓英;王学义;宋志刚【作者单位】国家油气钻井装备工程技术研究中心,陕西宝鸡 721002;国家油气钻井装备工程技术研究中心,陕西宝鸡 721002;中国海洋石油总公司,北京100027;宝鸡石油机械有限责任公司,陕西宝鸡 721002;宝鸡石油机械有限责任公司,陕西宝鸡 721002;国家油气钻井装备工程技术研究中心,陕西宝鸡721002;国家油气钻井装备工程技术研究中心,陕西宝鸡 721002【正文语种】中文【中图分类】TE951随着对深水及超深水海域的勘探开发,越来越多的深水钻机管子处理系统逐步应用于半潜式钻井平台及钻井船[1]。
海洋钻井平台检查细则
10
査现场和资
料
变压器及室外配电箱安装正确,标识清楚,外表无损 伤。
有一处不合格扣2分
5
査现场
全船照明良好、无损坏现象。
有一处不合格扣2分
5
査现场
六甲板叢设备(50分)
2.吊机
吊机柴油机(或电机)、液压泵、马达及机械传动系 统等工作正常、保养良好。
有一处不合格扣5分
20
査现场
吊机转向、起放及变幅灵活,液压系统无渗漏。
5
査现场
压井管线和防喷管线原则上要保持平直,由于受条件 限制被迫转弯时其角度不小于120度。
达不到要求扣5分
5
査现场
放喷管线出口应在一类危险区以外。
达不到要求扣5分
5
査现场
全套井控设备按规定进行试压合格。
无试压记录扣10分
10
査现场、资 料
压井管汇和节流管汇每个闸门按规定挂牌编号。
未挂牌编号扣10分,挂 牌内容不正确或标识不
液力变矩器添加符合标准变矩器油,油位油质符合标 准。
一项达不到要求扣2分
5
査现场
固井泵、灌注泵、清水泵保养良好、清洁。
有一处不合格扣2分
5
査现场
操作控制盘仪表齐全,指示正确,固定牢靠。
有一处不合格扣2分
5
査现场
设备清洁,保养良好。
达不到要求扣5分
5
查现场
:■・■ *控设备 一垢一
1.井控设 备
按钻井工程设计要求配备防喷器、控制系统和辅助设 施。
一项达不到要求扣2分
4
査现场
锚链、提环、锚无损伤裂纹。
达不到要求扣2分
2
査现场
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基座焊接固定在悬臂梁的吊机基础上,基座的主要目的 是将抓管机上的所有载荷传递到平台结构件上。基座将抓管 机提高到一个预期的操作高度,同时为原动机提供空间,基 座内部装有电机(带万向轴)、电缆拖链、电缆槽、启停装 置和灯具等。拖链能确保抓管机在 ±180°范围内回转。人
图 2 关节式抓管机功能 图 3 关节式抓管机 和速度试验照片 抓管试验照片
图 4 关节式抓管机 图 5 关节式抓管机 负荷试验照片 负荷试验砝码照片
了机械工程技术持续发展的内在需求。本文对机械可靠性工 程研究体系的设计原则、体系内容做出较详细论述,在此基 础上对其发展趋向做出科学预测。
参考文献: [1] 吕亮凯 . 减速机械的可靠性维修及其维修决策研究 [J]. 南方农
机 ,2019,50(02):158. [2] 周谦 , 王飞 . 机械可靠性设计方式与原理分析 [J]. 山东农业工程
关节式抓管机是海洋钻井平台的主要吊运设备,担负着 钻具在悬臂梁和自动猫道机之间的移运工作。关节式抓管机 为全液压驱动,系统稳定、可靠性高、控制精准、结构紧凑、 覆盖范围广,工作效率极高,配有独立的操作间,极大地改 善操作人员的工作环境,减轻工人劳动强度。同时,关节式 抓管机还可以通过夹持器的吊钩吊取其它装置与设备,作为 吊机使用。 1 关节式抓管机介绍 1.1 关节式抓管机结构介绍
关键词:海洋钻井平台;关节式抓管机;试验 中图分类号:TE951 文献标识码:A 文章编号:1671-0711(2019)06(上)-0203-03
海洋钻井平台在钻井作业过程中,需要将钻具(包括钻 杆、钻铤、套管等)由悬臂梁堆场移运到钻台,再将钻杆单 根连接成立根,已连接好的立根可直接用于钻井,也可直接 排进指梁备用,即钻杆的移运、排放操作。另外在海上钻井 作业,经常遇到风浪,环境极其恶劣,安全问题很难保证。 因此提高钻具的钻进效率、减少钻井的操作人数尤为重要。
内,中间通过一根万向轴连接,控制抓管机的液压阀和其他 一些辅助设备也安装在转台内部油箱上面。
司机室由转台的平台支撑,人员通过一段直梯进入司机 室,直梯与转台一起旋转,保证发生故障后操作者可以在任 意位置离开抓管机。
转台、主臂、副臂之间通过主臂液缸、副臂液缸、销轴 等进行连接,副臂通过其内部的伸缩液缸与伸缩臂连接,通 过主臂液缸、副臂液缸、伸缩液缸的组合运动,可实现抓管 机在前后、俯仰、高度方向上的调整。
机构使抓管机可在基座上实现 ±180°范围内任意旋转,回 转机构主要包括回转支承、液压马达、行星减速机和小齿轮 等。回转支承外圈通过高强度螺栓与转台固定,回转支承的 内圈通过高强度螺栓与基座固定,可承受较大的垂向力和倾 覆力矩。回转支承的内圈是一个大齿圈,加工有内齿,转台 下底面安装有 3 套驱动装置,驱动装置由液压马达、行星减 速机和小齿轮组成,小齿轮提供吊机回转运动时所需的扭矩, 转台可通过驱动装置带动整个关节式抓管机和负载做旋转运 动。通过转台平台上一个合页舱门可以进入转台内部,内部 空间提供给了 HPU 和液压控制阀件,同时液压油箱也集成在 了转台内部。柱塞泵安装在转台底部,驱动电机安装在基座
工程与装备 ,2018,(11):263-264. [4] 蒋东升 . 工程机械购置选型和管理 [J]. 工程机械与维修 ,2018,
(06):110-111. [5] 付亮 . 机械可靠性分析方法概述 [J]. 内蒙古科技与经济 ,2018,
(20):85,161. [6] 关新 , 郭瑞 , 张硕等 . 固热耦合作用下风力机齿轮系机械可靠性
夹持器通过内置称重传感器的销轴与伸缩臂前端连接, 主要负责管具的抓取工作。夹持器通过液缸与马达实现夹持 器 ±180°范围内任意旋转、钳爪夹紧、压紧管具、钳爪水 平移动 4 个动作。同时还可将夹持器替换为吊耳,作为吊车 使用。 1.2 技术参数
回转范围:360°; 回转速度:0 ~ 1.0r/min; 抓管载荷:3.5t; 夹持器回转角度:±180°; 适用管具长度:3.5 ~ 14m; 抓管尺寸(同时夹持):2—7/8″,6 根;5—1/2″,3 根; 6—5/8″,3 根;8″,1 根;9—1/2″,1 根;13—3/8″,1 根; 20″,1 根。 2 关节式抓管机的试验 关节式抓管机完成制造、总装及单个动作测试后,于
灵敏度分析 [J]. 河南科学 ,2018,36(10):1539-1545. [7] 郭泰 . 工程设计中机械可靠性应用方法的研究 [J]. 山东工业技
术 ,2018,(17):220.
中国设备工程 2019.06 (上) 203
Research and Exploration 研究与探索·探讨与创新
China 中国 Plant 设备
Engineering 工程
TZ400 海洋钻井平台 关节式抓管机试验研究
李晓光,张晓军,戴克文,朱兴,任伟 (辽宁陆海石油装备研究院有限公司,辽宁 盘锦 124010)
摘要:关节式抓管机是海洋钻井平台的主要吊运设备,主要用于完成悬臂梁堆场与自动猫道机之间钻具的抓取和吊运 工作。本文介绍了由辽宁陆海石油装备研究院有限公司自主研制的关节式抓管机,该关节式抓管机配套于太重(天津)滨 海重型机械有限公司建造的 TZ400 自升式海洋钻井平台,设计、制造、厂内试验等工作均完成,并成功安装在 TZ400 自升 式海洋钻井平台上。本文主要介绍了关节式抓管机的机械结构、主要技术参数和厂内试验相关情况。
学院学报 ,2018,35(12):17-18. [3] 马园园 . 机械可靠性设计分析中 PDM 技术的具体应用 [J机室 4. 主臂 5. 主臂液缸 6. 副臂 液缸 7. 副臂 8. 伸缩臂 9. 夹持器 图 1 关节式抓管机平面图
可以通过一个合页舱门进入基座内部。 转台主要为整个抓管机提供旋转功能,通过一套回转