测井电缆绞车深度校正系统的设计与实现
测井液压绞车智能控制系统
测井液压绞车智能控制系统摘要:液压绞车是测井施工中必备的装置,液压绞车能够为测井提供垂直升降动力,辅助施工。
但在实际施工过程中,液压绞车操作人员需要随时对绞车的速度进行调整,所以绞车的稳定性难以保证,给施工带来了一定的安全隐患。
测井液压绞车智能控制系统,能够实现测井绞车的匀速升降,不仅提高了绞车升降的稳定性,同时也确保了施工的安全。
关键词:测井;液压绞车;智能控制系统前言液压绞车在现代工矿企业施工中被广泛使用,液压绞车在测井施工中,为升降井提供动力,测井施工的安全和效率多半是由液压绞车的性能决定的。
由于升降井时,深度会随着时间而变化,而绞车的滚筒半径也会受到深度变化的影响,电缆的线速度要通过人工调整才能达到相对的稳定性,而这种人工操作的误差又是不可避免的,所以电缆线速度难以恒定下来。
以往的测井施工中,绞车的操作人员成为了保证绞车稳定性的关键因素。
井筒的情况难以预测,运行随时可能受到阻碍,在这种情况下,考验的就是绞车操作人员的操控能力,如果精神不够集中,没有及时发现井筒情况,极易导致操作失误,使电缆无法正常运行,造成施工事故。
基于以上的不稳定因素,绞车的智能控制系统问世了。
绞车智能控制系统能够使绞车的各个构成部件全部实现智能化控制,它的工作原理是在将传感器安装在绞车的各个构成部件上,控制系统将传感器采集的信息进行处理和分析,计算出液压绞车的运行速率和电缆的线速度,真正实现智能化控制,保证绞车速度的稳定性,最终达到确保施工安全的目的。
1.液压传动的工作原理1.1液压系统的组成动力装置能够将机械能转化为压力能,从而为液压系统提供压力,推动整个液压系统进行工作[1]。
执行装置能够将压力能转化为机械能,并通过液压缸和液压马达,驱动工作部件运动;控制调节装置主要用来控制液压系统的液流的方向、液体压力和流量,通过压力阀、流量阀和方向阀等来实现.从而保证执行装置能够按计划工作。
辅助装置的辅助作用通过各种管接头、油管.油箱、过摅器和压力计等来实现.,从而确保液压系统运行的稳定性。
测井电缆深度记号标定新方法实现的研究与应用
测井电缆深度记号标定新方法实现的研究与应用一、研究背景测井电缆深度记号标定是油田勘探中非常重要的一项工作,其准确性直接影响到测井数据的可靠性和精度。
目前,传统的测井电缆深度记号标定方法存在着标定时间长、标定精度低等问题,因此需要寻找新的方法来提高标定效率和精度。
二、文献综述1.传统方法传统的测井电缆深度记号标定方法主要是通过在钻杆上安装深度计,并用手动或自动方式记录下电缆在不同深度处所对应的记号。
这种方法需要较长时间进行标定,并且存在着人为误差和机械误差等问题。
2.新方法近年来,随着计算机技术和信号处理技术的不断发展,新型测井电缆深度记号标定方法也得到了广泛关注。
例如,有学者提出了一种基于声波信号处理的测井电缆深度记号标定方法,该方法通过对声波信号进行分析处理,可以实现快速准确地进行电缆深度记号标定。
三、研究目的本研究旨在探究一种新的测井电缆深度记号标定方法,通过实验验证其在提高标定效率和精度方面的优势,并进一步应用于实际油田勘探中。
四、研究方法1.实验材料本次实验所采用的测井电缆为普通电缆,深度记号为每0.5m一个记号。
声波发射器采用50W功率的发射器。
2.实验步骤(1)将声波发射器固定在钻杆上,并将电缆固定在发射器下方;(2)通过计算机软件控制声波发射器发送声波信号,记录下信号传输时间;(3)根据信号传输时间计算出电缆所处深度,并记录下对应的记号;(4)重复以上步骤,直至完成所有深度记号标定。
3.实验结果分析经过多次实验测试,本研究所提出的测井电缆深度记号标定方法具有较高的准确性和稳定性。
与传统方法相比,该方法可以显著提高标定效率和精度。
五、应用前景本研究所提出的测井电缆深度记号标定方法具有广泛的应用前景。
该方法可以应用于各种类型的测井电缆,并且可以实现快速准确地进行深度记号标定。
此外,该方法还可以结合其他信号处理技术,进一步提高标定精度和效率。
六、结论本研究通过实验验证了一种新的测井电缆深度记号标定方法,该方法具有较高的准确性和稳定性,并且可以显著提高标定效率和精度。
测井绞车控制器电缆深度测量电路的改进
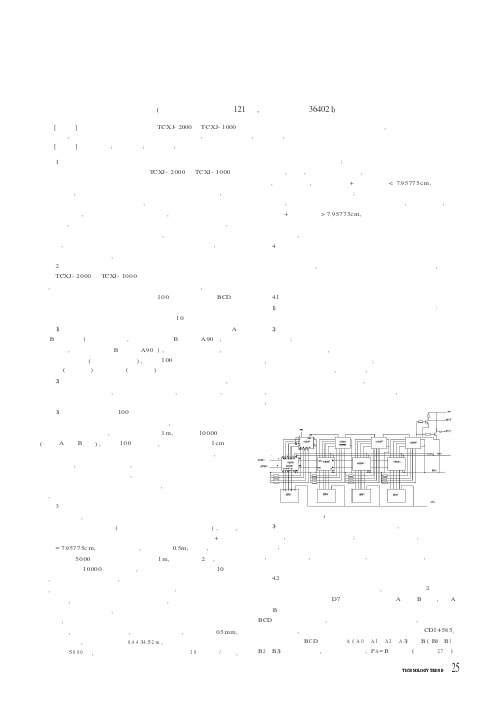
1 问题的提出 目前煤田数字测 井使 用的绞车有 TCXJ- 2 00 0 和 TCXJ- 1 0 00 型 两种绞车。绞车由机械部分、电缆、测井速度控制电路、深度测量电路 等部分组成, 实现了绞车恒速、自动控制测井。但在测井过程中, 由于 电缆、传动导向滑轮的长期使用磨损, 或者电缆受过较大拉力后电缆缆 径 发生 变化 等, 都使深度测 量产 生系 统误 差, 测量的深度 大于实际深 度。目前, 一般的解决办法是使用测井资料处理软件进行深度平差, 这 是以牺牲野外作业效率为代价的。笔者提出, 可以对原绞车深度测量电 路改进, 使用电路硬件实现在测井的同时边测井边平差的目的, 这样既 可以获得准确的测井深度, 又可以提高测井效率。 2 原绞车电缆深度测量电路 TCXJ- 2 0 00 和 TCXJ- 10 0 0 型绞 车的电缆深 度测量电路 是一样 的, 主要任务是完成电缆深度测量、显示、寄存三大任务, 并产生采样 间隔脉冲。它由电缆运行方向判别电路、1 0 0 分频电路、六位 BCD 码 计数器、六位拨码开关、六位井深寄存器、六位显示器、高四位预置停 车比较器、深度采样间隔电路、震荡器及电源等 1 0 部分电路组成。 1) 电缆运行方向判别电路的作用是将来自光电脉冲发生器的光 A、 光 B 脉冲信号 ( 当上提电缆时, 脉冲相位上光 B 超前光 A 90°, 当下 放电缆时, 脉冲相位上光 B 落后光 A9 0°) , 送到方向判别电路, 判断 出电缆运行方向 ( 电缆上提或下降) , 控制 1 00 分频器和计数电路进行 加计数 ( 下放电缆) 或减计数 ( 上提电缆) 。 2) 振荡器的作用是当不采用距离间隔采样而使用时间采样时, 由 振荡器送出时间采样脉冲, 供给分频和计数电路, 用以校验仪器, 它一 般不用于正常测井。 3) 井深测量电路。由 10 0 分频器、六位计数器、显示器、深度寄 存器等构成。电缆运行时要通过电缆导向轮后, 进入绞车滚筒。电缆导 向轮上安装 有光 电码盘, 使得电 缆每 运行 1 m, 要产生 10 0 00 个脉冲 ( 即光 A、光 B 脉冲) , 经过 1 0 0 分频器后, 对应电缆每运行 1 cm 有一 个脉冲信号。六位计数器的功能是对电缆的运行长度进行计数, 它使用 可逆计数器, 可以进行加减计数, 以对应电缆的上下运行。显示器由锁 存器、译码驱动器和数显管组成, 用以显示电缆的深度。深度寄存器的 作 用是 将所记录的电缆深度放在寄存器中, 将串行信号转化为并行信 号, 送到采集计算机进行数据采集。 3 测井深度误差产生的原因 我们知道, 测井绞车的机械部分由传动滑轮、排缆装置、卷筒等构 成。传动滑轮是一组滑轮 ( 一个主传 动轮、三个辅助传动轮) , 其中, 主轮通过齿带带动光电脉冲发生器产生深度脉冲。主轮的半径 + 电缆的 半径 = 7.9 57 7 5c m, 主轮每转一周, 电缆运行 0.5m, 同时, 光电脉冲 发生器发出 5 0 00 个深度脉冲。电缆运行 1 m, 主动轮转 2 周, 光电脉 冲发生器发出 1 0 00 0 个深度脉冲, 其对应关系是每毫 米产生 10 个深 度, 这对深度计数十分方便, 又有足够的精度。但同时也带来了新的问 题, 这些问题就是测井深度产生系统误差的原因: 第一, 轮通过齿带带动光电脉冲发生器, 齿带的松紧或每一个齿 的尺寸只要有微小的误差, 则光电脉冲发生器发出的脉冲就要产生较大 的误差; 第二, 轮的轮径 发生变化, 如主轮长期磨 损, 半径减小 0.5 mm, 主轮每转一周, 电缆运行只有 0 .4 4 34 5 2 m , 但光电脉冲发生器发出的 脉冲还是 5 0 0 0 个, 深度脉冲与深度的对应关系不是 1 0 个脉冲 / 毫米,
分析测井深度误差原因及自动化校深方法
分析测井深度误差原因及自动化校深方法在油气田的勘探和开发过程中,测井技术发挥着重要的作用,为油气资源的开发利用提供重要的指导和保障。
但在实际的操作中,因外界条件的限制,各种主客观因素的影响,在进行测井时常会出现或大或小的误差,严重的影响了油气资源的正常开发和利用。
找出误差出现的原因并探寻改正的方法,对油气井的正常工作会有很大的帮助。
标签:测井深度;误差原因;自动化校检油气的测井技术是随着油气井勘探开发而不断更新发展的,套前套后的、不同次的测井深度都会不同,产生误差。
这些误差会直接影响到射孔的质量,这一点在开发薄油气层时显得尤为重要。
对造成射孔深度误差的原因进行分析研究,并科学的制定并采取相应的措施将误差降到最小限度,就可以在此基础上更好地进行油气井开发和利用,确保油田正常生产。
1 测井深度误差产生的常见因素在测井时,不同次测井深度结果不相同,会出现不同的误差,引起误差出现的原因主要是以下几方面。
1.1 因测井电缆型号不完全相同及使用造成的疲劳程度不同而引起的误差。
不同厂家生产的不同批次的测井电缆因型号、粗细、材质等方面都有不同,在具体使用时使用频率也不一样,加之开始使用时间的不同,造成电缆的都有各自不同的疲劳度,测井电缆的伸缩变化也各不相同。
在使用这些电缆进行测井时,标准不统一,结果也会有差别。
这些测井电缆上的不同的原因就致使测井深度的结果出现了不同的误差。
1.2 测井电缆所受到张力的不同变化也会影响测井深度结果出现不同程度的误差。
在不同的时间段进行测井时,井眼内的地质状况、浓粘程度及下钻测深区域都有所变化,随着这些客观条件的变化,就是使用相同的电缆进行测井,这些测井电缆在不同时间、不同地质条件下受到的摩擦阻力和浮力都会出现不同的變化,这就让测井电缆进行测量时所受到的张力有了不一样的变化。
电缆所受张力的不同,测井结果自然就会出现不同了,误差也就随之产生了。
还可能因为对测井结果的不同需求,需要对测井电缆加装不同质量的检测仪器,加装了检测仪器的电缆的悬重就会出现变化,电缆所受张力也因此而改变,测井结果误差也就随之出现了。
测井仪绞车的工作原理及结构特点
测井仪绞车的工作原理及结构特点1、前言测井仪绞车是装载测井仪器和电缆绞车的专用石油工程车,可满足7000m以内的油、水、气井的测试工作,其结构高度集成化,抗干扰能力强,测井精度高,是油田找油、水、气井的理想设备。
随着测井技术的不断提高,常规组合测井、成像测井、随钻测井和工程测井、核磁共振测井等不同测井作业都对常规测井车的操作控制提出了更高的要求。
新开发的智能化测井仪绞车,可以通过智能化控制进行测试作业,使仪器的下放、调速、定位、测试、提升等一系列原来必须人为控制的操作,现在均可由仪器自动完成,不仅提高了测试数据的准确率,同时也提高了生产作业的效率。
2、工作原理智能化测井车是用于油田测井工艺的专用工程车。
它通过取力器从底盘变速箱/分动箱取力后,经传动轴传递给绞车的液压泵。
动力通过液压泵、液压马达及控制元件等组成的液压系统传递,再由液压马达带动绞车减速机进而驱动防磁滚筒转动,从而实现井下仪器的测试和回收。
测井施工时,PLC控制器的输入和输出端口与测井车上的电控泵、电控马达、手柄控制阀和电磁阀以及编码器、张力计等元件进行连接实现模拟信号和数字信号的输入输出信息反馈,通过智能操作系统对测井的速度、深度、张力等各项指标进行实时跟踪和自动控制。
3、结构特点智能化测井车主要由底盘、车厢(包括操作室和绞车室)、绞车总成、传动系统、电器系统、智能化操作系统、井下仪器舱及其他辅助部分构成。
3.1底盘该车选用梅赛德斯-奔驰MB ACTROS3331/6×4二类汽车底盘,发动机功率230kW。
3.2车厢车厢分为操作室和绞车室,整体采用钢骨架结构,后部为大圆弧状,卷帘覆盖,卷帘为双面涂聚胺脂胶的维纶布。
车厢整体外蒙皮为3mm铝合金板,操作室内装饰采用1.2mm不锈钢拉丝板,舱体六面壁聚胺脂发泡保温。
3.3绞车总成绞车总成主要包括滚筒、滚筒支架、滚筒制动装置等。
滚筒可缠绕7500m直径为11.8mm的电缆。
绞车最大提升力65kN,电缆起升速度30~8000m/h。
测井绞车深度与速度测量系统设计
Ke y wo r d s : L o g g i n g ; Op t i c a l e n c o d e r ;MC U
1 引 言
随着测井装备走向国际化 ,对测井绞车装备 的
化、 技 术 引进 、 设计 成熟 4个 阶段嘲 。 因此 , 如何 研 究
了提高控制精度 , 准确测量控制对象的位置是十分
重 要 的 。 目前 , 检测 位 置 的方法 有两 种 。一 种方 法
是使用位置传感器 ,将测量到的位移量 由变送器经
A / D转换 成数 字量 , 送 至 系统进 行 进一 步处 理 。 此 方 法 虽然 检测 精 度高 , 但在 多 路 、 长 距离 位 置监 控 系统 中, 由于 其 成本 昂贵 、 安装困难 , 因此并 不 适 用 。另
mi c r o c o n t r o l l e r c o u n t mo d u l e , s e i r a l o u t p u t mo d u l e , k e y b o a r d i n p u t mo d u l e a n d L ED d i s p l a y mo d u l e . T h i s p a p e r i n t r o d u c e s t h e c i r c u i t s c h e ma t i c s o f e a c h mo d u l e , nd a wr i t e s t h e s o f t wa r e p r o g r a m, d o e s s y s t e m d e b u g g i n g , a n d t h e n g a i n s a l o g g i n g w i n c h d e p t h a n d s p e e d me a s u r e me n t s y s t e m. Di s p l a y e d d e p t h r a n g e i s 9 9 9 . 9 9 me t e r s . Me a s u in r g d e p t h r e s o l u t i o n i s 1 mi l l i me t e r .T h e v e l o c i t y d i s p l a y r a n g e i s 9 9 . 9 9 me t e r s p e r s e c o n d .T h e v e l o c i t y r e s o l u t i o n i s 1
煤田测井绞车系统控制原理及使用探讨
煤田测井绞车系统控制原理及使用探讨发表时间:2018-09-10T09:45:54.063Z 来源:《基层建设》2018年第21期作者:吕琪[导读] 摘要:测井绞车是煤田测井工作中使用的重要设备,PSCJ-3绞车设计合理,性能稳定,完全能够满足测井工作需要。
广西煤炭地质局(广西煤炭地质一五0勘探队测井中心)广西柳州 545005摘要:测井绞车是煤田测井工作中使用的重要设备,PSCJ-3绞车设计合理,性能稳定,完全能够满足测井工作需要。
关键词:绞车系统,绞车控制器,反馈电路,触发电路,过载保护电路,井深测量显示电路,预置报警停车一、概述在煤田测井过程中,绞车系统主要负责井下仪器的提升和下放,井下仪器的供电及信号的传输都要通过该系统来完成,该系统工作的性能稳定性直接影响到测井工作能否顺利完成。
测井绞车系统由:绞车控制器、绞车、变速箱、电机、电缆和滑轮等几部分组成。
绞车控制器控制绞车作提升和下放运动,控制仪器提升或下放入井。
绞车控制器以数字显示测井速度、电机电压、电机电流、测井深度参数,绞车控制器主要作用是对绞车实行调速运行,其主要作用有如下几点:①控制直流电机转向,调节直流电机转速,并且稳定其转速。
②测量并显示电缆运行速度,控制电缆以恒定速度运行。
③数字显示电缆速度、电机电压、电机电流参数。
④如果探管在井中受阻,控制器拾取电机电流信号,控制绞车自动报警停车。
⑤预置深度报警停车功能。
⑥通过传动滑轮带动光电码盘产生的脉冲,准确显示测井深度。
二、绞车控制器的控制原理绞车控制器由电机控制电路、井深测量显示电路、报警控制电路等几部分组成。
绞车控制核心为电机控制电路,电机控制电路控制电机正反转、对电机实施调速控制和恒速控制。
它由无级调速电路、触发电路、反馈电路、电缆运行速度回路和电机负载等几部分组成。
现主要分析北京中地英捷仪器厂生产的PSJC-3型绞车,其工作原理介绍如下:1.电机控制电路电机控制电路控制电机正反转、对电机实施调速控制和电缆恒速控制。
基于STM32的井深测量和校正系统

基于STM32的井深测量和校正系统作者:张娇谢雁来源:《信息记录材料》2019年第01期【摘要】石油勘探时需要测量不同井位地层特性,其测量精度关系到能否在储层所在深度作业,因此深度的测量精确有很大的意义。
但精确的测量需要考虑井下仪器重量引起的电缆拉伸、马丁代克计量轮的打滑、磨损等引起的误差。
本技术结合马丁代克和光电编码器的特性,采用了高性能STM32F103作为CPU,并再加入了校正算法,有效地提高了测量精度。
经试验验证,该系统达到了较好的效果。
【关键词】STM32F103;光电编码器;数据校正;井深【中图分类号】TB921 【文献标识码】A 【文章编号】1009-5624(2019)01-0081-021 引言深度测量是测井作业中一项非常重要的部分,测量数据的准确度对于油气井的开采有着十分重要的意义[1]。
在实际测量中一般会将电缆的长度作为油井的深度,但我们很难获得比较准确的深度信息,造成误差的原因很多,主要是下面两方面:其一,电缆本身有一定的伸缩性,在井筒内会受到力和温度等因素的影响而被拉伸,而且井越深,伸张量越大;其二,光电编码器的抖动,传动轮的打滑、磨损都会对测量精度带来影响[2]。
为了减少误差,本技术仅使用了具有丰富硬件资源的STM32F103给出了深度测量和校正的系统设计原理和实现流程。
2 系统的总体设计本系统组成如图1所示。
在数据测量时,只需将测井电缆绕在传动轴上,使得光电编码器与传动轴同轴转动,运行的测井电缆带动光电编码器的测量轮旋转,产生A、B两相深度脉冲信号。
将深度脉冲信号输入到STM32F103通过I/O口配置的定时器X的TI1和TI2通道中,STM32F103对脉冲进行方向判断、计数,校正等操作,并通过串口传送产生的深度数据至计算机,实现深度实时显示。
3 系统硬件设计3.1 光电编码器光电编码器又称为手动脉冲发生器,是通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器。
随钻测井深度跟踪、标定、校正
技术报告关于深度跟踪标定过程一、引言所谓深度跟踪.就是仪器井深数据采集始终要与现场钻进或划眼状态下钻头位置保持一致。
井深跟踪的原理即利用绞车传感器感应滚筒转动、钻机参数参与推算、校正系数参与微调的处理方式来实现深度跟踪。
深度跟踪标定过程的目的就是为了建立BPI (绞车信号)与大钩位置的线性关系,然而由于BPI记录的是滚筒转过的角度对应的脉冲数,即:滚筒每转一圈大绳走过的长度,这一影响是由于大绳的直径与所引起的。
因此,为了建立BPI与大钩位置的线性关系。
这篇技术报告就是本人在工程服务部和科研项目部实习期间,通过学习、操作老版地面软件,并参与新版地面系统软件的分析和调试后,对这一个过程逐渐感兴趣,进而有了更深一步的认识,因此就这一过程提出些认识和分析,并提出一些疑问和改进意见。
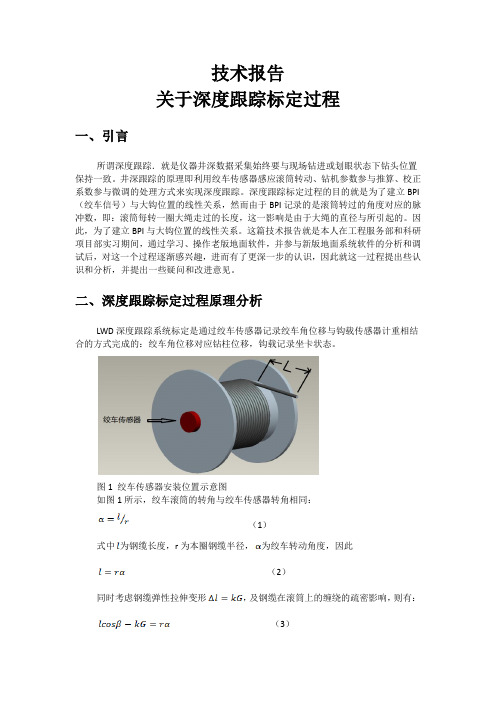
二、深度跟踪标定过程原理分析LWD深度跟踪系统标定是通过绞车传感器记录绞车角位移与钩载传感器计重相结合的方式完成的:绞车角位移对应钻柱位移,钩载记录坐卡状态。
图1 绞车传感器安装位置示意图如图1所示,绞车滚筒的转角与绞车传感器转角相同:(1)式中为钢缆长度,r为本圈钢缆半径,为绞车转动角度,因此(2)同时考虑钢缆弹性拉伸变形,及钢缆在滚筒上的缠绕的疏密影响,则有:(3)式中为钢缆在滚筒径向上的投影角,描述其缠绕疏密程度。
(4)可以看出,影响深度跟踪精确度的主要影响有两个方面:缠绕疏密缠绕疏密程度为一随机变量,与绞车制造工艺相关,为减少该误差影响,标定过程中应尽量缩短标定间距,此时可认为为固定值;拉伸变形拉伸变形虽然有规律可循,但由于变形量较小,并且如要消除该影响,需要对钩载传感器准确标定,在目前实际应用中难以满足该要求。
因此深度标定方程可表示为:(5)根据上述分析及绞车滚筒结构特点可得出以下结论:因每层钢缆半径不同,故在标定间距足够短的情况下,可认为绞车标定曲线由分段直线组成,见图2。
图2 绞车标定分段直线示意图三、深度跟踪标定和深度处理方法A.深度跟踪标定在下钻结束,划眼循环时进行标定。
电缆绞车设计及其应用
电缆绞车设计及其应用摘要:电缆绞车是为配套潜水射流喷冲式挖沟机的配套设备,潜水射流喷冲式挖沟机为海底作业设备,电缆绞车安装在船舶甲板为其提供动力,由挖沟机完成海底挖沟等业,因今年我国国内海上油气平台已向深海发展,原作业设备已不能满足作业需求,为适应深海油气作业的需要,设计了新型潜水射流喷冲式挖沟机,为满足配套挖沟机作业的需要,完成了电缆绞车的设计、生产、海上试验。
关键词:电缆绞车;挖沟机;电滑环1概述我国已探明的海洋石油资源量约246亿吨,占石油资源总量的22.9%;海洋天然气资源量为15.79万亿立方米,占天然气资源总量的29.0%,海洋石油在国内石油产量的增量中,已占有越来越重要的地位。
以上开采的油、气大多通过海底铺设管道输送到岸终端。
目前,我国海域已铺设的海底管道超过3000km,海底油气管道是投资高风险大的海洋工程设施,它对海上油气田的开发、生产与产品外输起着至关重要的作用。
管道一旦出现损伤和泄漏,将导致油田停产,污染海洋环境,甚至引起爆炸,给企业和国家造成巨大经济损失。
故海底海管铺设后需要对海管加以保护(一般是设备通过挖沟埋深),特别是浅水海域(甚至水深超过100米或200米海域)。
我所在公司为专业从事海管铺设、海底海缆铺设、海上结构物安装及海管挖沟(预挖沟及后挖沟)业务,我公司成立10年来已经在渤海、黄海、北海、南海及泰国湾完成海底挖沟近700公里,我公司所有海上施工设备基本为公司自主研发设计制造,并申请了国家专利。
海上挖沟设备主要为潜水射流喷冲式挖沟机(T型挖沟机和H型挖沟机),为挖沟机配套的设备包过胶管绞车、液压站、中压水站、声纳设备等,但根据国内开发油田向深海发展的目标,其挖沟设备和配套设备已不能满足作业水深作业需要,例如荔湾项目。
荔湾3-1气田位于南中国海东部,北偏西距离香港约300km,东北方向距离东沙群岛约170km,项目工程开发按照区域开发思路,新建一座中心平台,带动荔湾及周边气田开发。
测井电缆深度自动标记装置的研制及应用
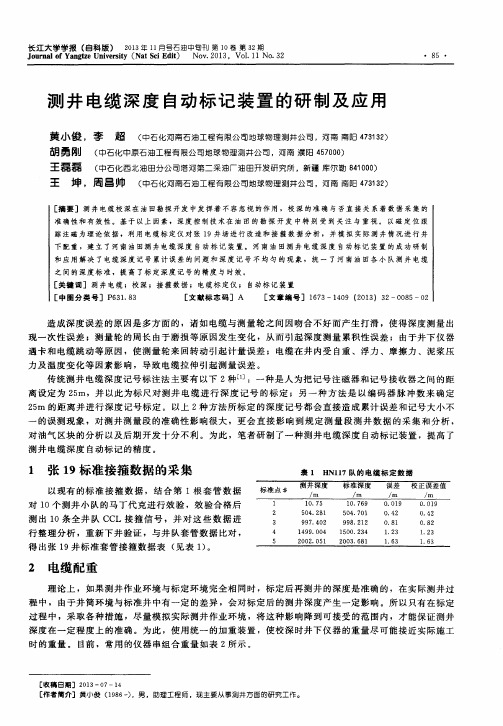
5 应 用 效 果
( 1 )磁 定位 跟踪 接箍 进行 电缆 深度 记号标 定 方法 ,使 各 小 队之 间测 井 深度 得 到 了统 一 ,规 范 了各 电缆之 间 的深度 标准 。利 用井下 套管 作 为深度 依据 ,排 除 了以往各 小 队因做 记号 时拉 尺子松 紧 ,配重不
合 适 导致 的累积 误差 ,新 旧电缆 不 同导致 的深 度误 差 。合理 的消 除 了滑 轮磨 损 、电缆磨 损 、电缆 拉伸量
力 及 温度变 化 等 因素影 响 ,导致 电缆 拉伸 引起 测量 误差 。
传 统测 井 电缆深 度记 号标 注法 主要有 以下 2种 [ 1 ] :一 种 是人 为把记 号 注磁 器和记 号接 收器 之 间的距
离 设定 为 2 5 m,并 以此为 标尺对 测 井 电缆 进 行 深 度 记号 的标 定 ;另 一种 方 法 是 以编 码 器脉 冲数 来 确定 2 5 m 的距 离并 进行 深度 记 号标定 。以上 2种方 法所 标定 的深 度记 号都 会直 接造 成 累计误 差 和记号 大小不
干扰 ,接箍 信 号峰清 晰可 辨 ,接箍信 号 峰幅度 大 于 3 c m,且 不 出现
畸形 峰 ;否则 ,测 速太 低 ,达不 到规 定 时效 ,而 且 所 测 磁 定 位 信 号小 ,注 磁系 统 不 易 辨 别 ,从 而 影 响 磁 定 位 的 跟踪 注磁 ,当 磁 定 位有 漏测 或无 辨 别情 况 ,则 需 要 重新 下放 至无 效 不 可 识 别 接 箍 信
造 成深 度误 差 的原 因是 多方 面 的 ,诸 如 电缆与 测量 轮之 间 因吻合 不好 而产 生打 滑 ,使得 深度测 量 出
现 一 次性误 差 ;测 量轮 的周 长 由于磨 损等 原 因发生 变化 ,从 而 引起深 度测 量 累积性 误差 ;由于井下 仪器 遇 卡 和 电缆 跳 动等原 因 ,使 测量 轮来 回转 动 引起计 量误 差 ;电缆 在井 内受 自重 、浮力 、摩擦 力 、泥浆压
测井数据深度校正方法综述

然后进行受力分析 , 传统 的算法是将 电缆假设为一 个链 状模 型 。但是 当考 虑井 中泥 浆对仪 器 的静压 力 时 ,这 种 模 型 就 不 适 用 了 。 19 93年 R b ̄ oe D s rn et 出 了杆 状 模 型 。把 电缆 在井 下 流体 eba d s 提 中的状态 假设 为一个 杆状 , 然后 进 行受力 分析 , 推导 出 了拉伸 校正公 式 。这 种模 型 克服 了之前 链状 模型
定拉 力产 生 的 电缆 伸长 。这个 校 正公 式 包含 了温 度 对 电 缆 的影 响 。 以此 为 基础 , 他用 c 言编 写 了 一 语 个测 井 电缆拉 伸校 正系 统 。该 系统 能对 测井 深度 数
要 进 行速度 校 正 。对 于 同一 口井 的多条测 井 曲线还 要 进 行 深度 对 齐 , 即作 相对 深 度校 正 。下 面将 从这
动做 的校正 。相 对深度 校 正则是 同一 口井的 多条测 井 曲线之 间的 深度 对 齐。
关键字: 深度 校 正 ; 拉伸 校 正 ; 速度 校 正 ; 井 测
O 引 言
深 度是 测 井资 料 中的一 项 重 要 的数 据 , 有 测 所 井 数 据均 要与深 度建 立一 一对 应 的关 系才能 准确 掌 握 测井 数 据 的真实 深度 , 准确 定位储 集层 深 度 , 为石 油 的 探 测 提 供 可 靠 的 依 据 。但 是 在 实 际 测 井 过 程 中, 由于各 种 因 素 的影 响 , 深度 值 是不 准 确 的 , 以 所
式 中 , 是 实 际深 度 , Hr H为测 井深度 , 为 附加 ah
深度 校正量 。
测井车绞车系统调整回路的优化设计

作者简介:马梓晋,男,1972年生,助理工程师,现从事测井绞车等产品的设计工作。
及元件特性的限制,导致绞车系统在低于3 m/min的低速工况下会图1 测井车结构示意图1. 电控系统2.汽车发动机3.汽车变速器4.分动箱取力器5.汽车传动轴6.液压油泵7.绞车滚筒8.液压马达+减速机图2 动力传输示意图图3 绞车系统容积调速回路液压原理图图6 多功能流控阀的液压原理图汽车发动机主要为车的行驶或绞车系统工作提供原动力,但不能同时为车辆行驶与绞车工作提供动力。
底盘接收发动机的动力并承载绞车系统及其电控系统。
绞车系统采用液压传动,其作用是通过取力器将发动机的动力柔性传递给减速机和绞车滚筒,以提升和下放测井电缆,满足测井作业的需要。
其主要为容积调速回路及其控制回路,其中容积调速回路通过双向变量泵、双向变[2]量马达分段调速的方法实现测井绞车的转速调节(见图)。
但是,该回路不能实现精细流量控制,无法满足测井作业的低速要求。
3电气系统主要用于为绞车电控系统及测井系统提供电源。
绞车电控系统用于控制绞车的运行速度,通过电比例控制手柄(控制电位器)和模拟控制器两部分实现。
电控手柄输出电压信号分别给模拟控制器1和模拟控制器2,控制器1将电压信号转换为控制双向变量泵比例电磁阀的电流信号,从而控制油泵的排量和供油方向;控制器2将电压信号转换为控制液压马达比例电磁阀的电流信号,从而控制马达的排量( 见图4),马达的旋转方向由双向变量泵的供油方向控制。
优化后的系统组成及应用为了满足测井工况的需要,使绞车的电缆传输速度可达到m/min ,在对液压容积调速回路兼容的基础上进行设计优化,扩展图4 原绞车电控系统流程图当绞车液压系统实现容积调速功能时,多功能流控阀的控制油口X 没有先导油,压力油由P 至P 或由P 至P 流动时通过插装1221阀,形成自由流量,实现容积调速的自适应。
为了满足容积调速回路最大流量225 L/min (发动机转速为1 800 r/min 时)的要求,选用的插装阀在压差为0.8 MPa 下的最大流量可达400 L/min 。
测井数据深度校正方法探析
53在测井工作中,测井数据作为重要的测井资料,其准确性对测井作业的开展非常关键,甚至直接关系着测井作业的效能,而深度校正作为提升测井数据准确性的有效方法之一。
当前常用的深度校正方法中,它们的基本原理类似,都是先计算相关变量的系数,然后相加测量所得深度和系数,接着对相加得到的误差值进行计算,最后筛选出误差较小、准确性较高的深度数据。
在开展测井数据深度校正的过程中,因为井内存在如电缆自身重量、浮力、泥浆压力等诸多不确定因素,这些因素均会导致测井数据或校正结果存在一定的不准确性,所以为了避免这些因素对深度校正的结果产生一定的影响,在探析测井数据深度校正方法的过程中,主要选择从以下三个方面展开分析。
1 电缆的拉伸与校正方法分析在测量井深度的过程中,因为各种因素的存在,比如温度、浮力、泥浆压力,再比如摩擦力、电缆自身重量等等,都会对电缆的拉伸产生一定的影响,从而造成测量数据与实际之间存在一定的误差,故需要对电缆拉伸产生的误差进行校正[1]。
目前在电缆拉伸方面,存在的校正方法较多,本文主要从以下两个方面展开分析:1.1 软件方面的拉伸校正方法在分析电缆受力情况的基础上,借助软件建立电缆受力链状模型,然后对电缆在井下泥浆中受到的静压力、摩擦力、自身重力等进行计算,以此准确计算出误差并校正。
通过软件建模计算电缆受力的方法最早提出于1993年,提出者为罗伯特(国外学者),他表示电缆拉伸校正和误差值的计算可以借助计算机软件建立杆状受力模型和拉伸校正公式完成。
相较于链状模型,杆状模型一般用于较深井测量电缆拉伸的校正,且得到的误差值更准确,校正后的数据也更准确,但此模型也存在一定的缺点,即会忽略井下温度对电缆产生的影响。
故为了考虑到温度对电缆产生的影响,建议对杆状模型进行完善,将电缆受热时的伸长量作为一种变量,添加到校正公式中,以此提升模型的准确性,从而得到更准确的校正数据。
然而,由于目前此种方法无法对井下的各种因素实现全面了解,依旧会导致较大误差的存测井数据深度校正方法探析钱志军 中海油田服务股份有限公司 天津 300459摘要:测井数据对测井作业的开展至关重要,故中选择测井数据为研究样本,从三个方面入手,浅析了其深度校正方法,首先对电缆的拉伸与校正方法进行了分析,其次对速度的校正方法进行了分析;最后对相对深度的校正方法进行了分析。
一种电缆测井深度测量校正方法
通过分析马丁代克测量系统误差产生原因,以及由于深度 轮在一周上的磨损具有不均匀性、拆卸复杂且需专业人员与专 业设备等因素,在实际测量过程中不能简单的只考虑以深度轮 的周长作为误差校正依据而通过测量其磨损后的周长来进行误
差校正。因此针对以上情况,提出了采用精确测量深度轮的周
长来校正因磨损而引起的误差方法。其思路是采用深度轮周长
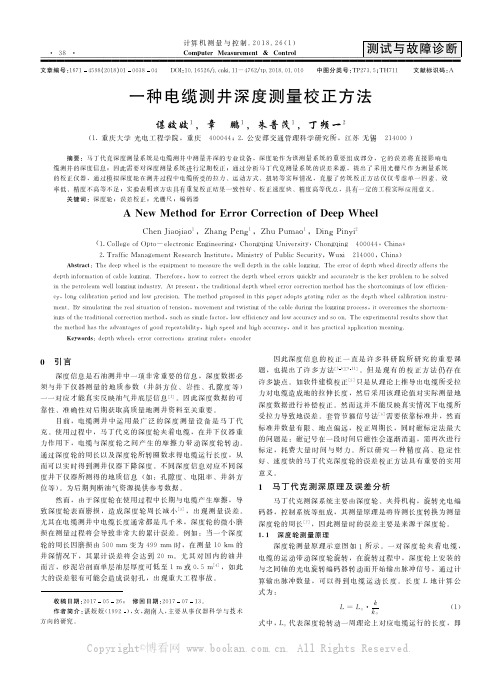
图 2 光 电 编 码 脉 冲 信 号
整卷电缆而是采用固定电缆,让测深系统沿着固定的一段电缆 做相对运动。同 时 通 过 调 节 张 拉 力 来 模 拟 真 实 电 缆 的 受 力 情
12 深 度 轮 测 量 误 差 因 素 分 析 1.2.1 深 度 轮 磨 损 影 响 因 素
通常深度轮使用一段时间后,由于深度轮与电缆之间的摩 擦而导致深度轮表面出现磨损。如图3所示为深度轮表面磨损 后的情况,通过肉眼就能明显观察到深度轮的磨损痕迹。
化 是 深 度 轮 测 量 误 差 的 主 要 原 因[1011]。 假 设 深 度 轮 磨 损 后 的
实际周长为 犔′0,由式 (1) 可知其测量误差为:
Δ犔=(犔′0 Nhomakorabea-犔0)· 犽 犽0
测量过程中深度轮转动圈数 犖 为:
(2)
犖
=
犽 犽0
(3)
式中,犽 为电缆运 动 过 程 中 光 电 旋 转 编 码 器 输 出 的 总 脉 冲 数,
· 38 ·
计算 机 测 量 与 控 制 .2018.26(1) 犆狅犿狆狌狋犲狉 犕犲犪狊狌狉犲犿犲狀狋 牔 犆狅狀狋狉狅犾
测试与故障诊断
文章编号:1671 4598(2018)01 0038 04 DOI:10.16526/j.cnki.11-4762/tp.2018.01.010 中图分类号:TP273.5;TH711 文献标识码:A
8000米测井绞车的设计和开发
