IRC5 Basic Training
ABB机器人IRC5C控制器电路图
1
2
3
4
5
6
7
8
Table of contents
Plant Location Page 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 Page description COPYRIGHT TITLE PAGE Table of contents: Table of contents: REVISION INFORMATION Front View Top View Side View BLOCK DIAGRAM MAIN POWER INPUT POWER SUPPLY DSQC 661 AND 662 EMERGENCY STOP RUN CHAIN OPERATING SAFETY STOP POWER UNIT RUN CHAIN EXT OPERATING MODE SELECTOR, 2MODES FPU, FLEXPENDANT Main Computer/AnybusCC/RS232 Exp./Interface Board/ MAIN COMPUTER A31 DSQC1000 MAIN COMPUTER A31 DSQC1000 ; A32 DSQC1003 FIELDBUS ADAPTER A32: DEVICENET A31.2 m/s DSQC1006 DIGITAL I/O UNIT INPUT DIGITAL I/O UNIT OUTPUT DIGITAL PART OF COMBI I/O AND DIGITAL I/O UNIT DSQC652 COMBI I/O UNIT DSQC651 RELAY I/O UNIT DSQC653 RELAY I/O UNIT DSQC653 REMOTE I/O UNIT DSQC350A Page supplementary field Date 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014 10/8/2014
BASIC_exercise

1Categor y:ApprovedIRC5机器人教育训练练习题 初阶:安全事项设定示教器语言为中文。
为机器人设定一个正确的时间的操作。
查看机器人的信息提示。
机器人备份与恢复的操作。
移动机器人:熟悉手动操作画面(JOGGING ) 使用增量模式移动机器人 慢慢地移动机器人的轴1――6 慢慢地移动机器人的X Y Z 慢慢地在线性动作模式下移动机器人 慢慢地在重定位动作模式下移动机器人笔 记:………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………2熟悉机器人各个轴的原点标记位置 6-5-4-1-2-3 进行转数计数器的更新操作 学习一下快捷菜单各按键的作用。
IO 信号:调出需查看的IO 单元画面 对DO 信号进行置位操作 对DI 信号进行仿真的操作RAPID 程序:程序结构的认识新建一个程序模块(module ),名字为“TESTMOD ”在刚才新建的程序模块里,新建一个例行程序(Main ) 建一个例行程序“MOVING ”用MoveJ 指令,编写机器人从p1点到p2点的程序。
MoveJ p1,v100,fine,tool0;MoveJ p2,v100,fine,tool0;在上述两条移动指令中增加等待3秒的指令。
ABB IRC5和RobotStudio使用入门
版本号 -
A B C D E
说明
用文档号 3HAC 021564-001 替换手册。 与 RobotWare 5.08 版配套发布。
已添加波兰语翻译。
RobotStudio Online 集成在 RobotStudio 中。标题已调整。
有关 RobotStudio 安装和许可授权的更新信息。
以有关安装 RobotStudio 的信息更新了所有系统的常用步骤 第 13 页 一节。
手册使用
本手册包含在完成物理安装后首次启动 IRC5 机器人控制器时的指示说明。
本手册的阅读对象
本手册面向: • 调试人员
操作前提
读者应该熟悉的内容: • 机器人硬件的机械安装。 • 受过机器人操作方面的培训。
本手册内容假定所有硬件 (操纵器、控制器等)均已正确安装并互相连接妥当。
各章结构
本手册由以下各章组成:
此步骤详细介绍如何使用单一机器人系统。
操作
参考信息 / 图示
1. 机械安装机器人和控制器,并连接其间的电气电源 电缆和信号电缆。 同时连接电气电源。
2. 确保已正确进行所有安全相关连接。
3. 将 FlexPendant 连接至控制器。
这些操作步骤分别在机器人和控 制器的产品手册中详述。
请参阅工作站接线图。
RobotStudio 分为以下两种功能级别:
• 基本 - 提供用于配置、编程和运行虚拟控制器的选定 RobotStudio 功能。它 还包括多项联机功能,用于对通过以太网连接的真实控制器进行编程、配置和 监控。
3. 在连接安全信号电缆之前,请根据要连接 的 Drive Module 数目从连接器 X7、X8、 X14 和 X17 移除跳线。 如图所示,将各 Drive Module 的安全信号 电缆连接到 Control Module 配电板。
ABB说明书

基本操作及编程培训IRC5 机器人系统IRC5 Basic Operation and Programming Training上海ABB工程有限公司 ABB Engineering (Shanghai) Ltd. 教材编号:S5-100 2006年03月IRC5 Basic Operation And Programming Training 基本操作及编程培训2IRC5 Basic Operation And Programming Training 基本操作及编程培训Content 目录1 2 3 Overview 介绍 ...................................................................................................................................5 Safety and environment protection 系统安全及环境保护 ............................................................6 General 系统概述 ..............................................................................................................................73.1 3.2 IRC5 System IRC5系统 ............................................................................................................................. 7 Consist of the system 系统组成................................................................................................................. 8 Buttons on the Control module 控制单元柜按键.................................................................................. 10 Buttons on the Drive module 驱动单元柜按钮 ...................................................................................... 12 Start the controller 启动 ........................................................................................................................... 134Start the controller 启动 .................................................................................................................104.1 4.2 4.35 6Shut down the controller 关机 .......................................................................................................14 FlexPendant 示教器 ........................................................................................................................156.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 Buttons on the FlexPendant 示教器按键 ................................................................................................. 16 The ABB Menu ABB菜单 ..................................................................................................................... 18 Close Button 关闭键 .............................................................................................................................. 19 Task Bar 任务栏 .................................................................................................................................... 19 Status Bar 状态栏 .................................................................................................................................... 20 The Quickset menu 快捷菜单.................................................................................................................. 20 Soft keyboard 软键盘 ............................................................................................................................. 21 Scrolling and Zooming 磙动与缩放 ...................................................................................................... 217 8 9Jogging the robot using the Joystick 使用操纵摇杆移动机器人 ................................................23 Precise positioning 精确定点..........................................................................................................298.1 9.1 9.2 Incremental movement 步进运动 ............................................................................................................ 29 Load an existing program 加载一个已存在的程序 ................................................................................ 31 Start and test a program in Manual mode手动测试程序 ......................................................................... 33Load a program 加载程序 .............................................................................................................3110 Stopping the program 停止程序 ....................................................................................................38 11 Running a program in Automatic mode自动运行程序 ...............................................................39 12 Rapid Programming Rapid编程 ....................................................................................................4112.1 12.2 12.3 12.4 12.5 12.6 13.1 13.2 13.3 13.4 Consist of the program 程序的组成 ........................................................................................................ 41 Basic Movement Instructions 基本运动指令 .......................................................................................... 42 Input/Output Instructions 输入/输出指令 ............................................................................................... 45 Communication Instructions 通讯指令 ................................................................................................... 46 Program Fflow Control Instructions 程序流程指令 ................................................................................ 46 Other Common Instructions 其他常用指令 ............................................................................................ 47 Modify positions (tune with motions) 修改位置点 ................................................................................. 48 Editing instruction arguments 编辑指令变量.......................................................................................... 49 Adding instructions 增加指令 ................................................................................................................. 52 Programming a delay 编辑延迟 .............................................................................................................. 5413 Editing a program 编辑程序 ..........................................................................................................483IRC5 Basic Operation And Programming Training 基本操作及编程培训14 I/O Signals 输入/输出信号..............................................................................................................5714.1 15.1 15.2 15.3 15.4 15.5 15.6 15.7 15.8 15.9 Programming an I/O instruction 编辑一条输入/输出指令 ..................................................................... 57 What is a log? 什么是纪录? .................................................................................................................. 60 What is an event? 什么是事件? ............................................................................................................ 60 What is an event message? 什么是事件信息? ...................................................................................... 60 What is an information message? 什么是通知信息? ............................................................................ 61 What is a warning? 什么是警告? .......................................................................................................... 61 What is an error? 什么是错误? ............................................................................................................. 61 What is "acknowledge"? 什么是确认 ?................................................................................................. 61 Open and close the event log 打开关闭事件纪录 ................................................................................... 61 View a message 查看信息 ....................................................................................................................... 6215 Event log 事件纪录..........................................................................................................................6016 Emergency stop 紧急停止 ..............................................................................................................64 17 Operational modes 运行模式 .........................................................................................................6517.1 17.2 17.3 18.1 18.2 18.3 What is the manual mode? 什么是手动模式? ...................................................................................... 65 Manual mode 100% (Option, testing mode)手动全速(选项,测试模式) ......................................... 65 Automatic mode (production mode) 自动模式(生产模式) ................................................................ 66 Manipulator 机器人本体 ......................................................................................................................... 69 Controller 机器人控制柜 ........................................................................................................................ 69 Other 其它................................................................................................................................................ 6918 Maintenance 机器人保养检查表 ...................................................................................................69 在没有声明的情况下,文件中的信息会发生变化。
ABB卓越的机器人控制器IRC5介绍

▪ Flush sides for reduced floor space 平齐侧面,节约空间
▪ All modules stackable on top of each other 所有模块位置任意组合
•Process module on
•Single cabinet •单柜式+过程柜
PPT文档演模板
ABB卓越的机器人控制器IRC5介绍
Distributability 可扩展
§ Place modules where they fit best 将模块放置在最合适的地方 § save floor space 节约空间 § optimize cost 降低成本
Up to 75 m (std 10 or 30)
唯一可用的自动负载识别 (德国客户)
PPT文档演模板
•Y•w
•Z•w •Y•t •Y’
•Z•t
•X•w
•Z’
•X•t •X’
•Back
ABB卓越的机器人控制器IRC5介绍
•Modular cabinet 模块化
PPT文档演模板
• Cabinet
ABB卓越的机器人控制器IRC5介绍
Module Family Concept 模块化
▪ Robust 非常稳定
ABB机械手说明书
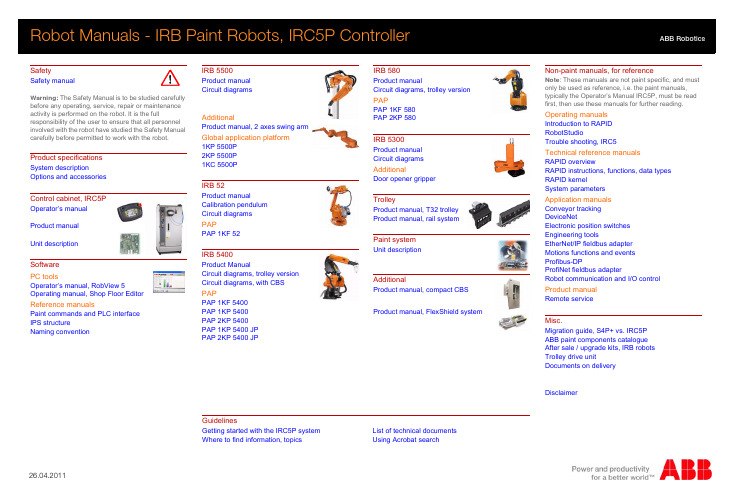
ABB RoboticsRobot Manuals - IRB Paint Robots, IRC5P ControllerSafety Safety manualWarning: The Safety Manual is to be studied carefully before any operating, service, repair or maintenance activity is performed on the robot. It is the fullresponsibility of the user to ensure that all personnel involved with the robot have studied the Safety Manual carefully before permitted to work with the robot.Product specifications System descriptionOptions and accessoriesControl cabinet, IRC5P Operator’s manual Product manual Unit descriptionSoftware PC toolsOperator’s manual, RobView 5Operating manual, Shop Floor EditorReference manualsPaint commands and PLC interface IPS structureNaming conventionIRB 5500Product manual Circuit diagramsAdditionalProduct manual, 2 axes swing armGlobal application platform 1KP 5500P2KP 5500P 1KC 5500PIRB 52Product manualCalibration pendulum Circuit diagramsPAP PAP 1KF 52IRB 5400Product ManualCircuit diagrams, trolley version Circuit diagrams, with CBSPAPPAP 1KF 5400PAP 1KP 5400PAP 2KP 5400PAP 1KP 5400 JPPAP 2KP 5400 JPIRB 580Product manualCircuit diagrams, trolley versionPAPPAP 1KF 580PAP 2KP 580IRB 5300Product manual Circuit diagramsAdditionalDoor opener gripperTrolleyProduct manual, T32 trolleyProduct manual, rail systemPaint system Unit descriptionAdditionalProduct manual, compact CBS Product manual, FlexShield systemNon-paint manuals, for referenceNote : These manuals are not paint specific, and must only be used as reference, i.e. the paint manuals, typically the Operator’s Manual IRC5P, must be read first, then use these manuals for further reading.Operating manuals Introduction to RAPID RobotStudioTrouble shooting, IRC5Technical reference manualsRAPID overviewRAPID instructions, functions, data types RAPID kernelSystem parametersApplication manualsConveyor tracking DeviceNetElectronic position switches Engineering toolsEtherNet/IP fieldbus adapter Motions functions and events Profibus-DPProfiNet fieldbus adapterRobot communication and I/O controlProduct manual Remote serviceMisc.Migration guide, S4P+ vs. IRC5P ABB paint components catalogue After sale / upgrade kits, IRB robots Trolley drive unitDocuments on deliveryDisclaimer26.04.2011GuidelinesGetting started with the IRC5P system Where to find information, topicsList of technical documents Using Acrobat search。
DLRB-120B工业机器人基础实训系统
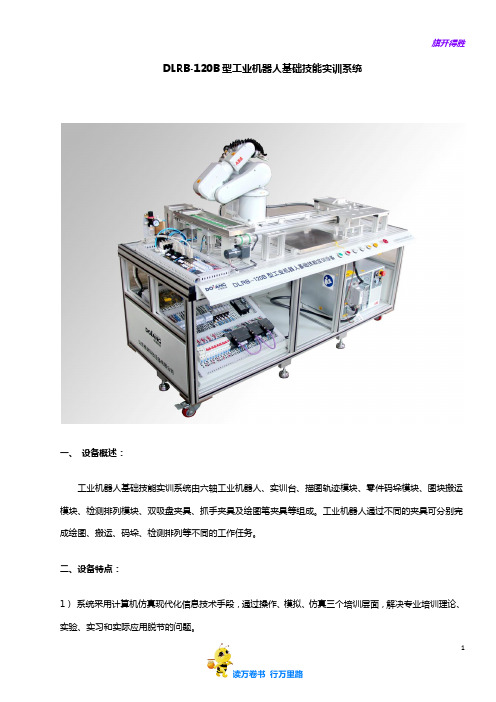
DLRB-120B型工业机器人基础技能实训系统一、设备概述:工业机器人基础技能实训系统由六轴工业机器人、实训台、描图轨迹模块、零件码垛模块、图块搬运模块、检测排列模块、双吸盘夹具、抓手夹具及绘图笔夹具等组成。
工业机器人通过不同的夹具可分别完成绘图、搬运、码垛、检测排列等不同的工作任务。
二、设备特点:1)系统采用计算机仿真现代化信息技术手段,通过操作、模拟、仿真三个培训层面,解决专业培训理论、实验、实习和实际应用脱节的问题。
2)系统操作安全(多重人身、设备安全保护)、规范,使用灵活,富有现代感。
3)模块化结构,各任务模块可与机器人组合完成相应任务4)开放式设计:可根据实训内容选择机器人夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
5)模具化运用:所有模型及夹具全部装入一次开模制作的物料存储箱内,使用保存方便快捷,节约空间,便于管理。
三、技术参数1).输入电源:单相三线制AC220V±10%50HZ,2).工作环境:温度-10℃-+40℃,相对湿度<85%(25℃),无水珠凝结海拔<4000m3).电源控制:自动空气开关通断电源,有过压保护、欠压保护、过流保护、漏电保护系统。
4).输出电源:(1)单相交流220V±10%50HZ ;由启动开关控制输出,并设有保险丝保护。
(2)直流稳压电源:24V/1A5).外形尺寸:1500mm×800mm×1500mm四、各模块简介1)实训台实训台体采用优质钢板(板厚1.2mm)制作,表面喷涂处理;实训台面采用型材结构搭建,可任意安装机器人或其它执行机构;并有不锈钢网孔电气安装板(板厚1.5mm),用于安装控制器件与电源电路;实训台上配有相应的操作面板和指示灯,分别为“启动”、“停止”、“复位”、“上电”,并且具备急停功能;可编程逻辑控制器安装于电气网孔板上,实现机器人与各任务模块的组合;实训台底脚上安装有脚轮,能够方便移动与定位。
ABB卓越的机器人控制器IRC5介绍-PPT课件

Benchmark, Path Accuracy 运动路径精度
Several path variants and velocities tested by a customer 不同状况下的客户测试结果
Test result
Path deviation
路径偏移
ABB
Competitor X
Less than 1 mm
The #1 Robot Controller 卓越的机器人控制器IRC5 Overview 简介
© ABB Group March 9, 2019 | Slide 1
From the first microcomputer robot controller… 从世界上第一台微电脑机器人控制器
© ABB Group March 9, 2019 | Slide 2
Remote panel 远程面板
202 cm
137 cm
Dual cabinet 双柜式
162 cm
97cm
Process module on Dual cabinet 双柜式+过程柜
Miscellaneous 特色功能
15 new patents 15项专利
© ABB Group March 9, 2019 | Slide 3
Motion Control 运动控制
© ABB Group March 9, 2019 | Slide 4
World best Motion Control 世界最佳的运动控制技术
speed
QuickMoveTM
Traditional
t Cycle time gain
© ABB Group March 9, 2019 | Slide 5
佳能中国技术人员认定制度Ver100528中文版
● ACE认证(Asia Certified Engineer)
以提高产品维修领域、网络解决的技术能力为目的的资格认定。 ● 现场操作测试(Onsite Test) 以提升工程师实际现场维修能力为目的动手能力测试 分为保养测试和维修技能考试(其中维修技能考试作为 ACE 复印机 3 级认证取得的必要条件之一)。 ● 佳能全球认证工程师——CCE俱乐部 以培养“网络技术”、“产品技术”和“现场故障解决技能”三方面都优秀,具有佳能全球认证工 程师水平的 CE 为目的的资格认定。
CE注册认定 ACE 1-2级
11
Classroom Training E-Learning + Classroom Training
ACE BIS SOHO Track – MFP Level3
Fundamenta 必要知识 Basic Engineering 工程师基础 Basic Technology 基础技术知识 Advanced Development&Produc 能力提高和产品
F F C
Basic 色彩基础 Color
B B
Basic 工程师基 Engineer 础
MS 办 MS 公软 Office 件
D AA AA
A A
Basic 网络基础 Network
扫描基础
ACE BIS copier Track
客户 CD 感动
E E
Basic 传真基 Fax 础 Start Start
ABB第五代机器人控制器IRC5手册

02
03
Modbus TCP/IP
PC SDK
一种通讯协议,允许IRC5控制器 与其他设备或系统进行数据交换 。
软件开发工具包,支持C和.NET 编程语言,可用于开发自定义的 机器人应用程序。
编程环境搭建步骤
1. 安装IRC5软件
从ABB官方网站下载并安装最新 版本的RobotStudio软件,该软 件包含了IRC5控制器的编程环境
排除方法
根据故障提示和诊断结果,采取相应的措施进行故障排除,如更换故障部件、 调整参数设置等。同时,建议定期对控制器进行维护和保养,以降低故障发生 的概率。
03
软件安装与配置教程
软件版本选择及兼容性
版本选择
根据机器人型号和应用需求,选择合适的IRC5软件版本,确保与机器人硬件兼容 。
兼容性检查
在安装前,检查计算机操作系统、硬件配置等是否满足IRC5软件的最低要求。
安装步骤详解
安装文件获取
从ABB官方网站或授权渠道下载IRC5软件的安装 文件。
安装过程
按照安装向导的提示,逐步完成软件的安装,包 括选择安装路径、接受许可协议等。
授权激活
在安装完成后,根据提示进行软件授权激活操作 ,确保软件能够正常运行。
配置参数设置指导
1 2
网络配置
根据机器人控制系统的网络拓扑结构,配置IRC5 软件的网络参数,包括IP地址、子网掩码、默认 网关等。
配置问题
若配置参数出现错误或无法 保存,应检查网络连接是否 正常、配置文件是否正确等 ,并尝试重新启动软件或计
算机。
运行问题
当软件运行过程中出现崩溃 、卡顿等问题时,可尝试更 新软件版本、优化计算机性 能或联系ABB技术支持获取 帮助。
ABB机器人操作手册-校准
本修订版包含下列新增内容和 / 或更改: • 淘汰了 S4Cplus/M2000。 • 淘汰了 IRB?4450S、IRB?6600/6650 和 IRB?940。 • 新增了 IRB?2600、IRB?4600、IRB?6620、IRB?6620LX、IRB?6640、 IRB?6660.
参考
文档名称
Product manual - IRB 140 Product manual - IRB 260 Product manual - IRB 460 Product manual - IRB 660 Product manual - IRB 760 产品手册 - IRB 1410 Product manual - IRB 1600/1600ID Product manual - IRB 2400 Product manual - IRB 2600 Product manual - IRB 4400/4450S Product manual - IRB 4600 Product manual - IRB 6620 Product manual - IRB 6620LX
本修订版包含下列增添和 / 或修改内容: • 增添 IRB 760 和 IRB 460。 • 将手册中全部 “ 后退弯曲的机器人 ” 命名更改为 “ 串联机器人 ”。 • 添加章节轴 4 和轴 6 的正确校准位置 第 45 页 。 • 在设备列表中添加 IRB 1600ID,有关转动盘适配器的信息,请参见校 准摆锤设备 第 29 页 。 • 添加关于水平仪 2000 机柜内连接点的信息,请参见启动 Levelmeter 2000 第 34 页 .
进行了少量的编辑性更改。 新增了校准悬摆工具的方法。 有关 IRB 7600-2.3/500 信息的变更。
ABB_IRC5机器人培训教材
D
点击消失
E
-3
点击可查看Hot Plug选项应用
C
C D E
自动模式 手动减速模式 手动全速模式
IRC5 Controller Basic Operation
Hot Plug 选项的使用
Hot Plug 按钮选项的使用。 附注: 系统在没有 FlexPendant 的情况下运行时切勿切换至手动模式(或者手动全速模式)。 当 您从非自动模式切换至自动模式时必须要连接 FlexPendant,否则您不能确认模式转换。
要重启机器人才能使用新值。重启以后 需要重新更新转数计数器
IRC5 Controller Basic Operation
IRB6600 和 IRB6640 六轴机器人机械零点位置
点此关闭
点击圆形内部 查看三维视图 -15
A B C D E F-H
轴 1 校准标志位 轴 2 校准标志位 轴 3 校准标志位 轴 4 校准标志位 轴 5 校准标志位 轴 6 校准标志位
STEP 1 2 操作 确保系统处于自动模式。 按住 Hot Plug 按钮。 按下按钮时,该按钮里面的红灯会亮起。 A: Hot Plug 按钮 B: FlexPendant 连接器 参考信息
A
按住Hot Plug按钮, 在按钮里面的红灯亮 起的同时在跳线插与 FlexPendant 连接器之 间切换。
运行链状 态指示灯
-5
IRC5 Controller Basic Operation
机器人急停信号输入/输出
急停信号输入 ES1
输出机器人 急停信号
X1
11
10
9
8
7
6
5
4
3
ABB机器人IRC5控制系统基础资料

ABB 机器人IRC5控制系统基础资料1、安全自动模式中,任何人不得进入机器人工作区域长时间待机时,夹具上不宜放置任何工件。
机器人动作中发生紧急情况或工作不正常时,均可使用E-stop键,停止运行(但这将直接使程序终止不可继续)进行编程、测试及维修等工作时,必须将机器人置于手动模式。
调试机器人过程中,不需要移动机器人时,必须释放使能器。
调试人员进入工作区域时,必须随携带使能器,以防他人操作。
突然停电时,必须立即关闭机器人主电源开头,并取下夹具上的工件。
严禁非授权人员操作机器人。
2、简介1974 ABB第一台机器人诞生,IRC5为目前最新推出的控制系统。
所属机器人大部分用于焊接、喷涂及搬运用。
当前使用的机器人型号为IRB1410,其承重能力为5KG,上臂可承受18KG的附加载荷,这在同类机器人中绝无仅有。
最大工作半径1444mm,常用于焊接与范围搬运,具可再扩展一个外部轴的能力。
3、机器人系统简介机械手为六轴组成的空间六杆开链机构,理论上可达到运动范围内任何一点。
每个转轴均带一个齿轮箱,机械手运动精度(综合)达正负0.05mm至正负0.2mm。
六轴均带AC伺服电机驱动,每个电机后均有编码器与刹车。
机械手带有串口测量板(SMB),测量板上带有六节可充电的镍铬电池,起到保存数据的作用。
机械手带有手动松闸按钮,维修时使用,非正常使用会造成设备或人员被伤害。
机械手带有平衡气缸或弹簧。
4、伺服驱动系统5、IRC5 系统介绍主电源、计算机供电单元、计算机控制模块(计算机主体)、输入/输出板、Customer connections(用户连接端口)、FlexPendant接口(示教盒接线端)、轴计算机板、驱动单元(机器人本体、外部轴)。
Transformer (变压器) Driver Unit (驱动板) Serial Measurement Unit (串口测量板) Axis Computer (轴计算机) Main Computer (主计算机) Gear 齿轮箱Motor 电机Resolve 编码器系统构成A 机器人本体(所示为普通型号)B1 IRC5 Control Module,包含机器人系统的控制电子装置。
ABB技术参考手册-RAPID语言概览
1 基本RAPID编程
11
1.1 程序结构 .......................................................................................................... 11 1.1.1 简介 ...................................................................................................... 11 1.1.2 基本元素 ................................................................................................ 13 1.1.3 模块 ...................................................................................................... 17 1.1.4 系统模块User .......................................................................................... 20 1.1.5 程序 ...................................................................................................... 21
EPSON机器人视觉培训

控制器及系统构成
PV1系统组成
单个相机 多个相机
PV1
Ethernet (支持USB)
PC*(1)
Ethernet
Giga Ethernet
GigE Camera
PoE Injector
*(1): RC+ needed to be running.
PV1
Ethernet (支持USB)
PC*(1)
▫ 校准:需要复杂的校准步骤
EPSON的解决方案——Vision Guide 7.0
• EPSON Vision Guide,有效解决您的困扰!
其他视觉
需要复杂的 视觉知识
通讯控制复杂
校准麻烦 步骤复杂
EPSON Vision Guide
简便易用 快速上手
无需通讯程序
向导指示 自动校准
Vision Guide 7.0——便捷易用
Fend
编程实例
——经典运用
Jump P0
‘运动到拍照位置
Wait 0.1
‘稳定位置
VRun test
‘执行图像序列
VGet test.Geom01.RobotXYU, found, x, y, u ‘获取结果
If found = True Then
‘如果找到结果
Jump XY(x, y, -50, u) /R
EPSON视觉 培训资料
内容
1、参考资料:(用户指南手册) 2、相机基本知识 3、爱普生视觉组件 4、相机安装和校准 5、视觉序列建立 6、第三方相机兼容
参考资料
RC软件帮助文档: 爱普生视觉指南软件参考 爱普生视觉指南硬件参考 爱普生视觉指南属性和结果参考
相机基本知识
最新ABB卓越的机器人控制器IRC5_介绍汇总
…to the 5th generation Robot Controller: IRC5 到第5代机器人控制器:IRC5
▪ Built on established ABB controller strengths ▪ Motion control 运动控制 ▪ Modular cabinet 模块化 ▪ Software 软件 ▪ Teach pendant 示教器 ▪ Miscellaneous 特色功能
▪ Available for IRB 140, 340, 260, 1600, 2400 以上型号机 器人适用
▪ Compact and fully integrated solution, e.g. for machine builders 高度集成化的解决方 案,如可集成在机床内
© ABB Group August 13, 2020 | Slide 14
=
© ABB Group August 13, 2020 | Slide 13
&
Panel Mounted Controller 面板式控制器
▪ Controller modules without enclosure, to be mounted in any suitable enclosure by customer 没有外壳的控制模块,可放置 在客户的任何控制柜内
Competitor
© ABB Group August 13, 2020 | Slide 5
ABB
Benchmark, Path Accuracy 运动路径精度
Several path variants and velocities tested by a customer 不同状况下的客户测试结果
abb 安全操作手册(中文)

2 工业操纵器
23
2.1 安全风险 .......................................................................................................... 23 2.1.1 操纵器安装和检修工作期间的安全风险 .......................................................... 23 2.1.2 工具/工件相关的安全风险 ........................................................................... 25 2.1.3 气压/液压系统相关的安全风险 ..................................................................... 26 2.1.4 操作干扰期间的安全风险 ........................................................................... 27
1.4 安全风险 .......................................................................................................... 20 1.4.1 与带电部件相关的风险 .............................................................................. 20
4 FlexPendant
55
4.1 工作中的安全事项 .............................................................................................. 55 4.1.1 自身安全 ................................................................................................ 55 4.1.2 安全使用 FlexPendant .............................................................................. 56 4.1.3 操作 FlexPendant .................................................................................... 57 4.1.4 手动模式的安全事项 ................................................................................. 59 4.1.5 自动模式下的安全性 ................................................................................. 60
A300-600南航飞行乘务员训练手册(中文)
9-2
2003/05/18
9-3
2003/05/18
9-4
2003/05/18
9-5
2003/05/18
9-6
2003/05/18
9-7
2003/05/18
9-8
2003/05/18
9-9
2003/05/18 9-10 2003/05/18 9-11
2003/05/18 9-12
2003/05/18 9-13
2. 控制面板.......................................................................................................................2-1 2.1. 概述 .......................................................................................................................2-1 2.2. 前乘务员控制面板(FAP) .................................................................................2-1 2.2.1 前乘务员控制面板的综合测试面板................................................2-1
4-2
2003/05/18
4-3
2003/05/18
4-4
2003/05/18
4-5
2003/05/18
4-6
2003/05/18
4-7
ABB_RSO

© ABB University -31
IRC5 Programming Basic
R.S.O功能二:系统配置与维护--恢复
选择Controller菜单 选择Restore Backup…
© ABB University -32
IRC5 Programming Basic
R.S.O功能二:系统配置与维护--恢复
给备份文件命名,并选择正确的存储路径 选择 Backup…
© ABB University -30
IRC5 Programming Basic
R.S.O功能二:系统配置与维护--恢复
获得 Write access权限后, 才能通过R.S.O对系统进行恢复 选择Controller菜单 选择Request Write Access
© ABB University -22
IRC5 Programming Basic
R.S.O功能二:系统配置与维护--I/O 配置
信号连接 Cross connections-有逻辑运算的 cross connections
© ABB University -23
IRC5 Programming Basic
R.S.O功能二:系统配置与维护--I/O 配置
获得 Write access权限后, 才能通过Add添加新的I/O实例 选择Controller菜单 选择Request Write Access
© ABB University -13
IRC5 Programming Basic
R.S.O功能二:系统配置与维护--I/O 配置
© ABB University -9
IRC5系统机器人培训

机器人将与人工智能、物联网等技术深度融合,形成更加智能、高效 的机器人系统。
04
随着机器人技术的普及和应用,对相关人才的需求也将不断增加,机 器人培训和教育市场将迎来更大的发展空间。
THANKS.
调试技巧
分享在编程过程中常用的调试技 巧,如断点设置、单步执行、变 量监视等,帮助提高编程效率。
典型应用案例分析
搬运应用案例
分析机器人在搬运场景中的应 用,包括搬运路径规划、抓取 工具选择、搬运策略制定等。
焊接应用案例
介绍机器人在焊接场景中的应 用,包括焊接工艺参数设置、 焊接路径规划、焊接质量检测 等。
在排除故障过程中,注意安全操作, 避免造成二次故障或损坏。
IRC5系统机器人扩
05
展功能及应用
视觉系统集成与应用
1 2 3
视觉系统硬件集成
将相机、镜头、光源等视觉硬件与IRC5系统机器 人集成,实现视觉引导、定位、检测等功能。
图像处理与算法开发
运用图像处理技术和算法,对采集的图像进行处 理、分析和识别,提取关键信息用于机器人作业 。
仿真技术与碰撞检测
03
运用仿真技术对机器人作业过程进行模拟和验证,检测潜在的
碰撞和干涉,确保机器人作业的安全性和可靠性。
协同作业与智能物流解决方案
协同作业模式介绍
介绍IRC5系统机器人与其他设备 、人员协同作业的模式和方法,
实现高效、灵活的协同作业。
智能物流系统构建
将IRC5系统机器人与上位管理系 统、物流设备等集成,构建智能 物流系统,实现自动化、智能化
组成和作用。
学习并实践了多种机器人应用 场景的解决方案,如自动化生 产线、物流仓储、医疗服务等 领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基本操作及编程培训IRC5 机器人系统IRC5 Basic Operation and Programming Training上海ABB 工程有限公司 ABB Engineering (Shanghai) Ltd. 教材编号:S5-100 2006年03月12 4013Rapid Programming Rapid编程 (41)13.1Consist of the program 程序的组成 (41)13.2Basic Movement Instructions 基本运动指令 (42)13.3 (45)13.4Input/Output Instructions 输入/输出指令 (45)13.5Communication Instructions 通讯指令 (46)13.6Program Fflow Control Instructions 程序流程指令 (46)13.7 (47)13.8Other Common Instructions 其他常用指令 (47)14Editing a program 编辑程序 (48)14.1Modify positions (tune with motions) 修改位置点 (48)14.2Editing instruction arguments 编辑指令变量 (49)14.3Adding instructions 增加指令 (53)14.4Programming a delay 编辑延迟 (55)15I/O Signals 输入/输出信号 (58)15.1Programming an I/O instruction 编辑一条输入/输出指令 (58)16Event log 事件纪录 (61)16.1What is a log? 什么是纪录? (61)16.2What is an event? 什么是事件? (61)16.3What is an event message? 什么是事件信息? (61)16.4What is an information message? 什么是通知信息? (62)16.5What is a warning? 什么是警告? (62)16.6What is an error? 什么是错误? (62)16.7What is "acknowledge"? 什么是确认? (62)16.8Open and close the event log 打开关闭事件纪录 (62)16.9View a message 查看信息 (64)17Emergency stop 紧急停止 (66)18Operational modes 运行模式 (67)18.1What is the manual mode? 什么是手动模式? (67)18.2Manual mode 100% (Option, testing mode)手动全速(选项,测试模式) (67)18.3Automatic mode (production mode) 自动模式(生产模式) (68)19创建工具 (71)Maintenance 机器人保养检查表 (78)19.1Manipulator 机器人本体 (78)19.2Controller 机器人控制柜 (78)19.3Other 其它 (78)在没有声明的情况下,文件中的信息会发生变化。
上海ABB工程有限公司不对此承担责任。
对文件中可能出现的错误,上海ABB工程有限公司不对此承担责任。
对于使用此文件或者此文件提及的软硬件所导致的部分或者严重性错误, 上海ABB工程有限公司不对此承担责任。
没有上海ABB工程有限公司书面允许,此文件的任何部分不得拷印或复制,并且其中内容也不能转于第三方和用作非法目的。
此文件中如有不详尽处,请参阅<<User Guide>>、<<Product Manual >>、<< RAPID Reference Manual >>等。
2Safety and environment protection 系统安全及环境保护机器人系统复杂而且危险性大,在训练期间里,或者任何别的操作过程都必须注意安全。
无论任何时间进入机器人周围的保护的空间都可能导致严重的伤害。
只有经过培训认证的人员才可以进入该区域,请严格注意。
以下的安全守则必须遵守:万一发生火灾,请使用二氧化炭灭火器。
急停开关(E-Stop)不允许被短接。
机器人处于自动模式时,不允许进入其运动所及的区域。
意外或不正常情况下,均可使用E-Stop键,停止运行。
在编程,测试及维修时必须注意既使在低速时,机器人仍然是非常有力的,其动量很大,必须将机器人置于手动模式。
气路系统中的压力可达0.7MP,任何相关检修都要切断气源。
在不用移动机器人及运行程序时,须及时释放使能器(Enable Device)。
调试人员进入机器人工作区时,须随身携带示教器,以防他人无意误操作。
在得到停电通知时,要预先关断机器人的主电源及气源。
突然停电后,要赶在来电之前预先关闭机器人的主电源开关。
维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。
安全事项在《用户指南》安全一章中有详细说明。
如何处理现场作业产生的废弃物现场服务产生的危险固体废弃物有:废工业电池、废电路板、废润滑油和废油脂、粘油回丝或抹布、废油桶。
普通固体废弃物有:损坏零件和包装材料。
现场服务产生的损坏零件由我公司现场服务人员或客户修复后再使用;废包装材料,我方现场服务人员建议客户交回收公司回收再利用。
现场服务产生的废工业电池和废电路板,由我公司现场服务人员带回后交还供应商;或由客户保管,在购买新电池时作为交换物。
废润滑油及废油脂、废油桶、粘油废棉丝和抹布,由我方现场服务人员建议客户分类收集后交给专业公司处理。
3.2 Consist of the system 系统组成Part DescriptionA Manipulator (a generic model shown) 机器人本体B1 Control Module, IRC5, containing the control electronics of the robot system.IRC5控制模块,包含机器人系统的控制元器件B2 Drive Module, IRC5, containing the power electronics of the robot system.IRC5驱动模块,包含机器人系统的功率元器件C RobotWare CD containing all robot softwareRobotWare光盘,包含所有的机器人系统软件D Documentation CD (option)手册光盘(选项)E Robot system software being run by the robot controller. The system has beenloaded into the controller from the server on the local area network.4Start the controller 启动4.1 Buttons on the Control module 控制单元柜按键A Main power ON/OFF 主电源开/关B Emergency stop 紧急停止按钮C Motor Enable/Disable 马达上电/失电按钮D Mode switch 模式选择旋钮Emergency stop: 紧急停止The robot stops – regardless of which state or mode the system is in – immediately when the emergency stop button is pressed. The button remains pressed in and, to turn to MOTORS ON again, must be returned to its original position机器人停止-不管在任何模式下,当急停按键被按下,机器人立即停止。
按键必须恢复至原来位置,并且马达需重新上电。
Motor Enable/Disable: 马达上电/失电In the MOTORS ON state, the motors of the robot are activated and the Motors On button is continuously lit.在马达上电状态,机器人的马达被激活,按键灯常亮。
Continuous light常亮 Ready for program execution 准备好执行程序。
Fast flashing light快闪The robot is not calibrated or the revolution counters are not updated. The motors have been switched on机器人未同步(未标定或计数器未更新),但马达已激活。
Slow flashing light慢闪One of the safeguarded space stops is active. The motors have been switched off. 至少一种安全停止有效,马达未激活。
A BFunction 功能 Info/Illustration 信息/图例A Two position mode switch 两位选择开关B Three position mode switch 三位选择开关C Automatic mode 自动模式Used when running ready-made programs inproduction. It is not possible to move the robotwith the joystick in this mode.生产运行时使用,在此状态下,操纵摇杆不能使用。
D Manual reduced speed mode 手动减速模式In manual mode the robot can only move in areduced and safe speed, and only under manualcontrol.You need to press the enabling switch to activatethe robot’s motors. The manual mode is mostoften used when creating programs and whencommissioning a robot system.手动状态下,机器人只能以低速,手动控制运行。