编码器5
编码器种类
编码器种类
(一)高精度编码器
1绝对式轴角编码器型号—E1032-14
2绝对式轴角编码器型号—E3032-14
3绝对式轴角编码器型号—E1035-14
4绝对式轴角编码器型号—E1050-14
5绝对式轴角编码器型号—E1065-14
6绝对式轴角编码器型号—E1065-16
7绝对式轴角编码器型号—E3080A(1:16) 8绝对式轴角编码器型号—E3080A(1:16) 9绝对式轴角编码器型号—E1130K-16
10绝对式轴角编码器型号—E1130K-14
11绝对式轴角编码器型号—E1210-21
12绝对式轴角编码器型号—E1300-22
13增量式编码器型号—E2120
14增量式编码器型号—E2180
(二)普通编码器
1普通编码器—— PIE系列
2普通编码器—— PIE3系列
3普通编码器—— PIF系列
4普通编码器—— PID系列
5普通编码器—— PIB系列
6普通编码器—— PIG系列
7普通编码器—— PKT170系列
8普通编码器—— PKT130系列
9普通编码器—— PKT120系列
10普通编码器—— PKT100系列
11普通编码器—— PKT75系列
12普通编码器—— PKT50系列
13普通编码器—— PAL系列。
编码器的分类

、编码器的分类根据检测原理,编码器可分为光学式、磁式、感应式和电容式,根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1 增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90。
,从而可方便的判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2 绝对式编码器绝对式编码器是直接输出数字的传感器,在它的圆形码盘上沿径向有若干同心码盘,每条道上有透光和不透光的扇形区相间组成,相邻码道的扇区树木是双倍关系,码盘上的码道数是它的二进制数码的位数,在吗盘的一侧是光源,另一侧对应每一码道有一光敏元件,当吗盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读书一个固定的与位置相对应的数字码。
显然,吗道必须N条吗道。
目前国内已有16位的绝对编码器产品。
1.3 混合式绝对编码器混合式绝对编码器,它输出两组信息,一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
二、光电编码器的应用增量型编码器与绝对型编码器区别1、角度测量汽车驾驶模拟器,对方向盘旋转角度的测量选用光电编码器作为传感器。
重力测量仪,采用光电编码器,把他的转轴与重力测量仪中补偿旋钮轴相连,扭转角度仪,利用编码器测量扭转角度变化,如扭转实验机、渔竿扭转钓性测试等。
摆锤冲击实验机,利用编码器计算冲击是摆角变化。
2、长度测量计米器,利用滚轮周长来测量物体的长度和距离。
拉线位移传感器,利用收卷轮周长计量物体长度距离。
联轴直测,与驱动直线位移的动力装置的主轴联轴,通过输出脉冲数计量。
介质检测,在直齿条、转动链条的链轮、同步带轮等来传递直线位移信息。
3、速度测量线速度,通过跟仪表连接,测量生产线的线速度角速度,通过编码器测量电机、转轴等的速度测量4、位置测量机床方面,记忆机床各个坐标点的坐标位置,如钻床等自动化控制方面,控制在牧歌位置进行指定动作。
5线编码器接线方法
5线编码器接线方法
首先,要了解5线编码器的工作原理。
5线编码器是一种多路复用器,可以将5条输入线上的模拟信号转换为二进制编码输出。
其中,通常有4
条输入线用于接收模拟信号,另外1条输入线用于选择输出编码。
输出编
码的位数与输入信号的数量相关,一般情况下,有2^N个输出。
接线方法如下:
1.首先,确定输入信号的数量。
假设有N条输入信号,我们需要选择
N+1条输出编码线。
2.将N条输入信号分别接到编码器的N条输入线上。
这些输入信号通
常是模拟信号,可以是电压、电流、温度等。
3.将1条选择信号接到编码器的选择输入线上。
选择信号用于确定输
出编码线的状态。
当选择信号为低电平时,输出编码线与输入信号无关;
当选择信号为高电平时,输出编码线将根据输入信号进行编码。
4.将N+1条输出编码线连接到其他设备或接口上。
这些输出编码线可
用于输入信号的传输、存储或显示。
总结:。
绝对型编码器的使用方法

绝对型编码器是一种用于测量旋转或线性运动的装置,可以准确地确定位置信息。
它与增量型编码器相比,不仅可以提供位置变化的信息,还可以直接读取或确定实际位置。
下面是使用绝对型编码器的一般步骤:
1.安装:将绝对型编码器正确安装在要测量的旋转轴或线性运动部件上,根据设备的要求进行固定和连接。
确保编码器与被测对象之间的运动连接稳固且无误差。
2.电源连接:将编码器的电源线连接到适当的电源源头,确保编码器可以正常工作。
3.信号线连接:将编码器的输出信号线连接到接收设备上。
绝对型编码器通常有多个输出信号线,其中包括用于位置数据和其他辅助功能的不同类型输出。
根据需要,连接适当的输出信号线到相应的接收设备。
4.校准:在初次使用绝对型编码器之前,可能需要进行校准或设置初始位置值。
这通常涉及到按厂家提供的说明进行操作,以确保编码器的零点或初始位置正确对应到被测位置。
5.数据读取与解码:使用接收设备(例如计算机、PLC控制器等)读取和解码绝对型编码器的输出信号。
根据编码器的型号和接口类型,可以采用不同的方法进行读取和解码。
通常,厂商会提供相应的文档和软件工具来辅助数据读取和解码操作。
6.数据处理与应用:根据实际需求,对编码器输出的位置数据进行处理和应用。
例如,可以将位置数据用于精确控制运动系统、位置定位、运动轨迹规划等应用。
请注意,在使用绝对型编码器之前,应仔细阅读厂商提供的操作手册和相关文档,并严格按照说明进行操作和连接。
如有需要,建议在必要时咨询专业人士的指导。
编码器修正说明书(第5-4-3)

5.4.3编码器复位因某种故障导致编码器数据成为异常值或更换马达时,需要使机器人返回原位置(修正编码器)。
在这种情况下,需要首先重新进行编码器复位,请按下列步骤执行编码器复位操作。
如果进行编码器复位,则编码器数据将被初始化,使机器人无法正常动作。
在复位后,必须使用零点栓进行编码器修正。
如果未正确进行编码器的修正,则在再生作业程序时,会因机器人误动作使作业人员被机器人夹伤,而导致人员死亡或受重伤。
连接马达后,因编码器内部超级电容器放电,可能出现下列错误。
(例:连接了超级电容器与未充电的新马达时)E 0050……编码器计数器溢流/下溢。
E 0052……编码器电池异常。
编码器数据也可能出现异常。
此时,请在接通控制装置电源10分钟后再进行编码器复位。
然后,先使控制装置电源OFF后,再次使电源O N ,则设备会恢复正常状态。
必需的工器具编码器复位无需使用特别的工器具。
编码器复位步骤****-**处显示的是机器人型号。
****-**处显示的是机器人型号。
将光标对准对象轴(执行编码器复位的轴),同时按下[功能转换]键键。
≫ 在勾选框内选择对象轴。
补充****-**处显示的是机器人型号。
至此已经完成编码器复位。
接下来,请参照下一节执行编码器修正。
5.4.4编码器修正 实施编码器复位操作后,再实施编码器修正作业。
这是使机器人(修正的对象轴)对齐规定的位置(称为基准位置,即插入零点栓的位置),在该位置登录“编码器修正值”,使编码器数据显示规定值的操作。
各轴的基准位置(插入零点栓的位置)和当时的编码器数据如下图所示。
此编码器数据是在确认正确实施了修正时需要用到的非常重要的数字。
[ST133F-01][ST166F-01][ST210F-01]图5.4.4-1 地面安装型 J1,J2,J3轴的基准位置(零点栓插入部位)基准位置处的 编码器数据 J1轴 80,000[Hex] J2轴 80,000[Hex] J3轴 80,000[Hex]图5.4.4-2 棚架安装型J1,J2,J3轴的基准位置(零点栓插入部位) [ST133F-01][ST166F-01][ST133TF-01][ST166TF-01]图5.4.4-3 手腕轴的基准位置(零点栓插入部位)[ST210F-01][ST210TF-01]图5.4.4-4 手腕轴的基准位置(零点栓插入部位)在机器人动作过程中发生马达损坏等情况时,有时须在不能插入零点栓的位置上更换马达及执行编码器复位。
利达华信编码器说明书
利达华信编码器说明书摘要:1.利达华信编码器简介2.编码器的功能与特点3.编码器的应用领域4.编码器的安装与操作5.编码器的维护与故障排除6.编码器的技术参数与型号选择正文:利达华信编码器说明书一、利达华信编码器简介利达华信编码器是一款高精度、高可靠性的编码器产品,广泛应用于自动化控制、工业机器人、数控机床等领域。
本说明书将详细介绍利达华信编码器的功能、特点、应用、安装与操作、维护与故障排除以及技术参数与型号选择等内容。
二、编码器的功能与特点1.高精度:采用先进的编码技术,实现高精度的位置检测和速度测量。
2.高可靠性:采用优质材料和精密制造工艺,确保产品在恶劣环境下稳定工作。
3.抗干扰能力强:具有良好的抗电磁干扰和抗振动性能。
4.多种输出信号:提供多种输出信号,如增量式、绝对式、串行接口等,满足不同应用需求。
5.易于安装与维护:采用模块化设计,便于安装与维修。
三、编码器的应用领域1.自动化控制:用于自动化生产线、物流系统等自动化控制领域。
2.工业机器人:用于工业机器人的位置控制、姿态控制等。
3.数控机床:用于数控机床的刀具补偿、位置控制等。
4.电梯及起重设备:用于电梯、起重设备等的安全控制与监测。
5.其他:还包括石油、化工、冶金、电力等行业。
四、编码器的安装与操作1.安装环境:避免阳光直射、潮湿、高温、有腐蚀性气体等恶劣环境。
2.安装步骤:根据产品安装说明书进行安装,注意接线正确。
3.操作方法:根据具体应用场合选择合适的输出信号,正确连接到控制器或PLC。
五、编码器的维护与故障排除1.定期检查:定期检查编码器的运行状况,注意接线端子是否松动、损坏等。
2.故障排除:如发现故障,请先检查接线、电源等基本问题,如无法解决,请联系售后服务。
六、编码器的技术参数与型号选择1.技术参数:包括分辨率、信号输出、工作电压、防护等级等。
2.型号选择:根据实际应用需求,选择合适的型号和规格。
快速门变频器使用说明书(中文)

9、全部输入信号均可参数实时监控。
10、变频器、PLC合二为一,高度集成。
2安全使用注意事项
1、实施配线前,请务必关闭电源。
2、切断交流电源后,指示灯未熄灭前,表示变频器内部仍有高压,十 分危险,请勿触摸内部电路及零部件。
3、运转时,请勿检查电路板上零部件及信号。
4、报警复位:
断电后,再上电按
OFF复位。
4、快速调试
4.1、使用机械限位开关:
变频器出厂值为机械限位开关模式(C31.05=1),安装后即可使用。
根据需要调整以下参数:
序 号
参数
号
功能说明
备注
1
C31.0
5
选择控制模式
C31.05=1
2
C31.0
0
下降延时时间设定
出厂值5(5S)
3
C31.0
1
上升低速运行时间
3.6移除G和X4短接线,可以进行正常的开门/关门操作
可能要调整的参数如下:
序号
参数号
功能说明
备注
1
C31.05
选择控制模式
:C31.05=3
2
C31.08
X6端子功能
出厂值0
3
C31.18
半开/全开延时选择
出厂值:1
4
C31.00
下降延时时间设定
:出厂值5(5S)
5
C31.02
上升高速频率设定
出厂值:50HZ
6
C31.06
下降高速频率设定
出厂值:35HZ
注:门关闭时光电开关无效的接线----X5、G
4.3使用增量式编码器
Eltra系列编码器-5
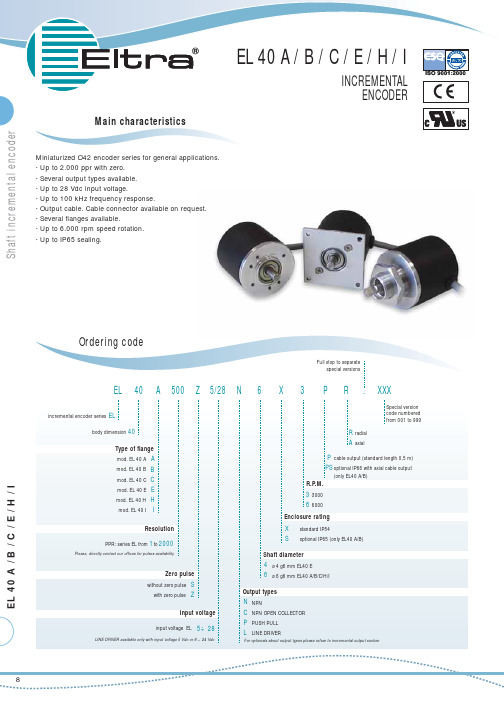
Shock 50 G per 11 msec
Vibrations 10G 10 ÷ 2000 Hz
Bearings life 109 revolutionss
Bearings n° 2 Ball bearings
Shaft material Stainless steel AISI303
Body material Aluminium D11S - UNI 9002/5
Via Monticello di Fara, 32 bis - 36040 Sarego (VI) - ITALY - Tel. +39 0444 436489 R.A. - Fax. +39 0444 835335
© Copyright 2006 Eltra S.p.a. - All right rederved: All information in this catalog is subject to change without notice - Eltra takes no responsability for typographical errors. For the terms of sales please check the website www.eltra.it.
Special version code numbered from 001 to 999
P cable output (standard length 0,5 m) PS optional IP66 with axial cable output
(only EL40 A/B)
R.P.M.
3 3000 6 6000
Zero pulse
S without zero pulse Z with zero pulse
编码器使用说明书
1.※有网友问:增量旋转编码器选型有哪些注意事项?应注意三方面的参数:1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。
2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。
3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。
其输出方式应和其控制系统的接口电路相匹配。
2.※有网友问:请教如何使用增量编码器?1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。
2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL电平,A脉冲在前,B脉冲在后,A,B 脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。
一般利用A超前B或B超前A进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。
也有不相同的,要看产品说明。
3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。
4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。
5,在电子装置中设立计数栈。
3.※关于户外使用或恶劣环境下使用有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。
我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型编码器,放在户外不怕脏,钢厂、重型设备里都可以用。
不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还是有一定差距的。
4.※从接近开关、光电开关到旋转编码器:工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。
5-3编码器测试仪的作用和原理

1
编码器测试仪的作用和原理
编码器测试仪的作用
用编码器测试仪,逐个轴测试重载连接器母插芯连接是否准确。若编码器测 试仪上显示的测试结果均无问题,将接线盒外盖和本体的围板组件装上即可。若 编码器测试仪显示出现接线错误,则需排查重载连接器母插芯连接是否准确,对 应的电机组件管线的连接状态是否正常,待到编码器测试仪显示连接无问题,则 可继续接下来 复位与波特率选择按钮
1/6
1
编码器测试仪的作用和原理
编码器测试仪的组成 编码器测试仪的面板包括电源开关、液晶显示屏、接线夹、状态指示灯和复
位与波特率选择按钮几个部分。
1. 电源开关 开关上的红色LED灯亮时表示编码器测试仪处于接通状态。自上而下分别表示:
9V直流电源总开关、编码器供电5V直流开关和3.6V直流电池开关。 2. 液晶显示屏
4/6
1
编码器测试仪的作用和原理
编码器测试仪的使用步骤 2. 将连接线缆一端插入编码器线缆的重载连接器母插芯中,另一端与编码器测 试仪的对应接口相连,逐个轴测试机器人的接线准确性。按编码器错误复位按钮, 对编码器连接状态测试。
若测试后,状态指示灯处只有左侧第一个亮,表示编码器正常运行。若左侧 第二个灯亮起,则表示编码器错误,这种情况需要按编码器错误复位按钮,重新 对编码器连接状态测试。若测试结果还是编码器错误,则需要检查编码器线缆接 线状态,调节后重新检测。
3/6
1
编码器测试仪的作用和原理
编码器测试仪的使用方法 编码器测试仪与工业机器人编码器线缆重载连接器的连接通过左图所示的连
接线缆实现。连接线缆一端可以与编码器线缆的重载连接器母插芯连接,另一端 分散成六个伺服电机的编码器线缆,每根线缆对应一个伺服电机,终端有与编码 器测试仪连接的接口。右图所示是连接线缆的编码器线缆重载连接器母插芯连接 端。 编码器测试仪的使用步骤 1. 编码器测试仪连接电源。按下9V直流电源总开关、编码器供电5V直流开关, 选择波特率2.5。若要测试编码器电池连线状态,可同时按下3.6V直流电池开关。
编码器选型参数简介
编码器(encoder)选型参数简介传感器—将要测量的物理量转换成可读取、处理的另一个物理量,现代控制中最常用的就是电信号。
如果把计算机、可编程控制器比喻为自动化控制的“大脑”,那么传感器就是自动化控制的“眼睛”,是机电一体化的信息反馈装置.由计算机、执行机构、执行机构内部反馈构成的控制系统,称为开环控制;由计算机、执行机构、执行机构内部反馈、执行效果外部传感器信息反馈构成的控制系统,称为闭环控制。
传感器的电信号有模拟量型和数字量型,模拟量就是电流或电压的大小变化模拟被测量物理量的大小,如果传感器输出的模拟量电信号已经是标准的信号,例如4—20mA、0—20mA、1—5V、0—10V等,这样的传感器有时也称为变送器。
传感器的电信号有时也用电压、电流高于某个域置或低于某个域置来代表1或0的数字信息,或用光信号的通、暗来传递信息,这样的传感器就是数字量输出型。
编码器—角位移,线位移及转速传感器.编码器是以数字化信息将角度、长度的信息以编码的方式输出的传感器,其具有高精度,大量程测量,反应快,数字化输出特点;体积小,重量轻,机构紧凑,安装方便,维护简单,工作可靠。
编码器以测量方式来分,有直线型编码器,角度编码器,旋转编码器。
如以信号原理来分,有增量型编码器,绝对型编码器。
增量型编码器(旋转型)工作原理:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
编码器内部pnpnpn详解说明有图示
编码器内部pnpnpn详解说明有图⽰编码器输出信号类型⼀般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接⽤于控制、信号处理和远距离传输,所以在编码器内还需要对信号进⾏放⼤、整形等处理。
经过处理的输出信号⼀般近似于正弦波或矩形波,因为矩形波输出信号容易进⾏数字处理,所以在控制系统中应⽤⽐较⼴泛。
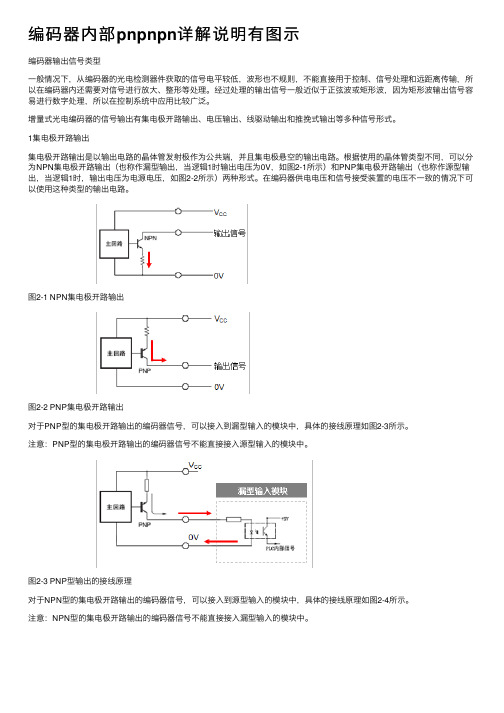
增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。
1集电极开路输出集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。
根据使⽤的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑1时输出电压为0V,如图2-1所⽰)和PNP集电极开路输出(也称作源型输出,当逻辑1时,输出电压为电源电压,如图2-2所⽰)两种形式。
在编码器供电电压和信号接受装置的电压不⼀致的情况下可以使⽤这种类型的输出电路。
图2-1 NPN集电极开路输出图2-2 PNP集电极开路输出对于PNP型的集电极开路输出的编码器信号,可以接⼊到漏型输⼊的模块中,具体的接线原理如图2-3所⽰。
注意:PNP型的集电极开路输出的编码器信号不能直接接⼊源型输⼊的模块中。
图2-3 PNP型输出的接线原理对于NPN型的集电极开路输出的编码器信号,可以接⼊到源型输⼊的模块中,具体的接线原理如图2-4所⽰。
注意:NPN型的集电极开路输出的编码器信号不能直接接⼊漏型输⼊的模块中。
图2-4 NPN型输出的接线原理电压输出型电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了⼀个上拉电阻,这样就使得集电极和电源之间能有了⼀个稳定的电压状态,如图2-5。
⼀般在编码器供电电压和信号接受装置的电压⼀致的情况下使⽤这种类型的输出电路。
图2-5电压输出型推挽式输出推挽式输出⽅式由两个分别为PNP型和NPN型的三极管组成,如图2-6所⽰。
当其中⼀个三极管导通时,另外⼀个三极管则关断,两个输出晶体管交互进⾏动作。
Sensata Technologies MHK5系列绝缘多转编码器说明书

Mechanical| MHK5 SERIESETHERNET/IP ABSOLUTE MULTI -TURN ENCODERSPECIFICATIONSFeatures• Robust and compact design• Blind shaft version. 15mm standard ID with options down to 6mm ID • Precision ball bearings with sealing flange • High temperature performance -40° to +85°C• Code disc made of unbreakable and durable plastic• Precision, robust, gear train for turns counting - immune to stray magnetics or electrical interference• Resolution: 13 bits = 8192 steps/turn (Optional 16 bits) • Number of turns: 12 bits = 4096 turns (Optional 14 bits)• Polarity inversion and short circuit protection •Highly integrated circuit in SMD-technologyCONNECTIONElectricalEthernet Connector 4 pinouts, female, D codedPower SupplyConnector4 pinouts male, A codedEncoder viewEncoder viewEnvironmentalTechnology and InterfaceDIMENSIONSAll dimensions are in millimetersMHK5 ETHERNET IPORDERING OPTIONS Example : MHK5-EEA1B-1213-B150-PRMPage 4CONTACT USSensata Technologies, Inc. (“Sensata”) data sheets are solely intended to assist designers (“Buyers”) who are developing systems that incorporate Sensata products (also referred to herein as “components”). Buyer understands and agrees that Buyer remains responsible for using its independent analysis, evaluation and judgment in designing Buyer’s systems and products. Sensata data sheets have been created using standard laboratory conditions and engineering practices. Sensata has not conducted any testing other than that specifically described in the published documentation for a particular data sheet. Sensata may make corrections, enhancements, improvements and other changes to its data sheets or components without notice.Buyers are authorized to use Sensata data sheets with the Sensata component(s) identified in each particular data sheet. HOWEVER, NO OTHER LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE TO ANY OTHER SENSATA INTELLECTUAL PROPERTY RIGHT, AND NO LICENSE TO ANY THIRD PARTY TECHNOLOGY OR INTELLECTUAL PROPERTY RIGHT, IS GRANTED HEREIN. SENSATA DATA SHEETS ARE PROVIDED “AS IS”. SENSATA MAKES NO WARRANTIES OR REPRESENTATIONS WITH REGARD TO THE DATA SHEETS OR USE OF THE DATA SHEETS, EXPRESS, IMPLIED OR STATUTORY, INCLUDING ACCURACY OR COMPLETENESS. SENSATA DISCLAIMS ANY WARRANTY OF TITLE AND ANY IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, QUIET ENJOYMENT, QUIET POSSESSION, AND NON-INFRINGEMENT OF ANY THIRD PARTY INTELLECTUAL PROPERTY RIGHTS WITH REGARD TO SENSATA DATA SHEETS OR USE THEREOF.All products are sold subject to Sensata’s terms and conditions of sale supplied at SENSATA ASSUMES NO LIABILITY FOR APPLICATIONS ASSISTANCE OR THE DESIGN OF BUYERS’ PRODUCTS. BUYER ACKNOWLEDGES AND AGREES THAT IT IS SOLELY RESPONSIBLE FOR COMPLIANCE WITH ALL LEGAL, REGULATORY AND SAFETY-RELATED REQUIREMENTS CONCERNING ITS PRODUCTS, Americas+1 (800) 350 2727*******************Europe, Middle East & Africa +33 (3) 88 20 8080****************************Asia Pacific*************************.com China +86 (21) 2306 1500Japan +81 (45) 277 7117Korea +82 (31) 601 2004India +91 (80) 67920890Rest of Asia +886 (2) 27602006 ext 2808AGENCY APPROVALS & CERTIFICATIONSFlexmount KitNormally is part of the model number construction. For replacement part, usethe part number below.M9445/017comes with all hardware for installationon the encoderBrass Reduction Sleeve9432/06 = 6mm ID 9432/08 = 8 mm ID9432/9.52 = 9.52 mm (3/8”) ID9432/10 = 10 mm ID 9432/12 = 12 mm ID 9432/12.7 = 12.7 mm (1/2”) ID9432/14 = 14 mm IDACCESSORIES。
编码器及其应用实验报告

编码器及其应用实验报告一、实验目的本次实验的主要目的是深入了解编码器的工作原理,并通过实际操作和实验数据,探究编码器在不同应用场景中的性能和特点,从而为今后在相关领域的应用提供实践基础和理论支持。
二、实验原理编码器是一种将旋转运动或直线运动转化为数字信号的装置。
根据工作原理的不同,编码器主要分为增量式编码器和绝对式编码器。
增量式编码器通过记录脉冲的数量来确定位置的变化。
每当编码器的轴旋转一定角度,就会产生一个脉冲信号。
通过计算脉冲的数量,可以计算出轴的旋转角度或移动距离。
然而,增量式编码器在断电后重新上电时,无法记住之前的位置信息。
绝对式编码器则在每一个位置都有唯一的编码输出。
即使在断电后重新上电,也能立即准确地知道当前的位置。
三、实验设备本次实验所使用的设备包括:1、旋转编码器:选用了精度为每转 1024 个脉冲的增量式编码器和分辨率为 12 位的绝对式编码器。
2、数据采集卡:用于采集编码器输出的脉冲信号。
3、计算机:安装了相应的数据采集和分析软件。
4、电机驱动系统:用于控制电机的旋转速度和方向,以带动编码器旋转。
四、实验步骤1、设备连接与设置将编码器安装在电机轴上,并确保连接牢固。
将编码器的输出信号连接到数据采集卡的相应通道。
在计算机上打开数据采集软件,设置采集参数,如采样频率、通道选择等。
2、增量式编码器实验启动电机,使其以不同的速度匀速旋转。
观察数据采集软件中脉冲数量的变化,并记录下来。
改变电机的旋转方向,再次观察脉冲数量的变化。
停止电机,然后重新上电,观察编码器是否能准确记录位置变化。
3、绝对式编码器实验同样启动电机,使其旋转到不同的位置。
读取数据采集软件中编码器输出的绝对位置编码,并与实际位置进行对比。
重复多次,验证绝对式编码器的位置准确性和稳定性。
4、应用场景模拟实验搭建一个简单的位置控制系统,使用编码器作为反馈元件。
通过调整控制参数,观察系统的响应性能和精度。
五、实验数据与结果分析1、增量式编码器实验结果在电机匀速旋转时,脉冲数量与旋转角度呈线性关系,符合预期。
绝对式编码器工作原理
绝对式编码器工作原理
绝对式编码器是一种用于测量旋转位置的设备,它可以提供准确的绝对位置信息。
其工作原理如下:
1. 光学原理:绝对式编码器使用光学传感技术来测量位置。
它包括一个发光装置和一个接收装置,发光装置会发出光束并照射到编码盘上。
2. 编码盘:编码盘是一个圆盘,上面按照一定规律分布着光学编码器,通常有两个或多个同心圆环。
每个编码器包含了一组条纹,条纹之间的间距会根据位置的不同而有所变化。
3. 光束反射和接收:当光束照射到编码盘上的条纹上时,光束会被反射回接收装置。
接收装置可以检测到光束的强度,并将其转换为电信号。
4. 信号处理:接收装置会将接收到的光信号转换为数字信号,并通过信号处理器进行处理。
信号处理器会根据不同的编码方式解析光信号,以确定位置信息。
5. 位置计算:根据接收到的数字信号,绝对式编码器可以准确计算出旋转位置的数值。
每个条纹上的编码器对应着一个唯一的二进制码,通过解析每个编码器的状态,可以确定具体的位置。
绝对式编码器相对于增量式编码器的优势在于,它可以直接提供准确的位置信息,不需要进行初始化或复位操作。
由于光学
原理的使用,绝对式编码器也具有较高的精度和分辨率。
这使得绝对式编码器在许多应用领域中被广泛使用,如机械加工、自动化控制系统等。
海德汉编码器工作原理

海德汉编码器工作原理
海德汉编码器是一种用于数字信号传输的编码方式,其工作原理是通过将数字信号转换成模拟信号,然后通过模拟信号的方式传输数据。
具体地说,海德汉编码器将输入的二进制数据按照一定规则进行组织和编码,生成一系列模拟信号。
这些模拟信号可以是连续的正弦波信号或方波信号。
编码器根据输入信号的高低电平状态和特定的编码规则,生成相应的模拟信号。
海德汉编码器使用了差分编码的技术,即在编码过程中考虑了前一位的编码值。
这样可以减少信号传输过程中的误差和干扰,提高传输的可靠性。
通过使用差分编码,编码器可以根据前一位的信号状态确定当前位的信号状态,从而保持连续的信号传输,减少传输过程中的突变和错误。
在海德汉编码中,每一位的编码取决于该位和前一位的信号状态。
如果两位的信号状态相同,则编码为0;如果两位的信号
状态不同,则编码为1。
通过这种编码方式,海德汉编码器可
以将二进制数据转换为连续的模拟信号,用于信号传输。
海德汉编码器在数字通信系统中具有较好的抗干扰能力和传输可靠性,但同时也引入了一定的延迟。
因为编码器需要考虑前一位的信号状态才能确定当前位的信号状态,所以会增加信号传输的延迟。
但在实际应用中,海德汉编码器的优点还是显著的,特别是在长距离的数字信号传输中更为常见。
各种编码器校正方式

各种编码器校正方式:增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A 和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的UV线反电势波形;2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;4.一边调整,一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点,最终使上升沿和过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
优先级别的高低由设计者根据输入信号的轻重 缓急情况而定。如根据病情而设定优先权。
2020/1/24
8
例:八线—三线优先编码器74LS148
表4-5 74LS148电路的功能表
2020/1/24
9
74LS148的逻辑功能描述:
(1) 编码输入端:逻辑符号输入端 I0~I7 上 面均有“—”号,这表示编码输入低电平有效。
禁止 状态
工作 状态
2020/1/2412(4)选通输出端YS和扩展输出端YEX:为扩
展编码器功能而设置。
允许编码, 但无有效编
码请求
正在优先 编码
2020/1/24
13
以上通过对74LS148编码器逻辑功能的分析, 介绍了通过MSI器件逻辑功能表了解集成器件功能 的方法。
要求初步具备查阅器件手册的能力。不要求背 74LS148的功能表。
允许编码, 但无有效 编码请求
优先权 最高
低电平 有效
2020/1/24
10
(2) 编码输出端 Y2、Y1、Y0 :从功能表可以 看出,74LS148编码器的编码输出是反码。
2020/1/24
11
(3) 选通输入端:只有在 S = 0时,编码器才 处于工作状态;而在 S = 1时,编码器处于禁止状态, 所有输出端均被封锁为高电平。
结束
3.2 编码器
放映
3. 2 . 1 普通编码器 3 . 2 . 2 优先编码器
2020/1/24
1
复习
简述SSI组合电路的分析步骤。
2020/1/24
2
人们为解决实践上遇到的各种逻辑问题,设计 了许多逻辑电路。然而,我们发现,其中有些逻辑 电路经常、大量出现在各种数字系统当中。为了方 便使用,各厂家已经把这些逻辑电路制造成中规模 集成的组合逻辑电路产品。
图4-6 用74LS148接成的16线—4线优先编码器 16
作业题 P181—3.7
2020/1/24
17
2020/1/24
4
对M个信号编码时,应如何确定位数N?
N位二进制代码可以表示多少个信号?
例:对101键盘编码时,采用几位二进制代码? 编码原则:N位二进制代码可以表示2N个信号, 则对M个信号编码时,应由2N ≥M来确定位数N。
例:对101键盘编码时,采用了7位二进制代码 ASCⅡ码。27=128>101。
00 0 1 0 0 0 0 0 1 1
00 0 0 1 0 0 0 1 0 0
0 0 0 0 0 1 0 0任何1时刻0只允1许输 0 其0它输0入0取值组0合0不允1许出0现,入1为一无个1关编项码0。请求
00 0 0 0 0 0 1 1 1 1
2020/1/24
7
3.2.2 优先编码器
在优先编码器中,允许同时输入两个以上的有 效编码请求信号。
图3-4
2020/1/24
普通编码器的方框图
Y2Y1Y0 称八线—三线编码器
6
设输入信号为1表示对该输入进行编码。
表3-4 编码器输入输出的对应关系
I0 I1 I2 I3 I4 I5 I6 I7 Y2 Y1 Y0 10 0 0 0 0 0 0 0 0 0
01 0 0 0 0 0 0 0 0 1
0 0 1 0 表0达式0、电0路图0? 0 1 0
2020/1/24
图4-5 74LS148的逻辑符号
14
电路扩展应用:8-3线扩展成16-4线
①输入信号的连接;
②级联问题(芯片工作的优先级); ③输出信号的连接。
2020/1/24
15
仿真
编码输出的最高编位码输出为原码
(2)片无有效 编码请求时才 允许(1)片编码
优先权
最高 2020/1/24
比较常用的有编码器、译码器、数据选择器、 加法器和数值比较器等等。下面分别进行介绍。
2020/1/24
3
3.2 编码器
生活中常用十进制数及文字、符号等表示事物。
编码器
译码器
数字电路只能以二进制信号工作。
用二进制代码表示文字、符号或者数码等特定 对象的过程,称为编码。
实现编码的逻辑电路,称为编码器。
目前经常使用的编码器有普通编码器和优先编码 器两种。
2020/1/24
5
3.2.1 普通编码器
定义:任何时刻只允许输入一个有效编码请 求信号,否则输出将发生混乱。
举例:以一个三位二进制普通编码器为例, 说明普通编码器的工作原理。 八个病房呼叫请求
输入:八个信号(对象)
对病房编码 I0~I7 (二值量) 输出:三位二进制代码