基于ARM9与WindowsCE的车辆GPS定位信息采集系统(嵌入式在线)
基于ARM9的嵌入式视频监控系统的设计与实现
接 口V I 42进行 了分析 , 为编写视频数据采集应用程序提 供 了有益的参考。
关 键 词 : 入 式 ; 频 监 视 ; J G sem r 嵌 视 M P —ra e t 中 图 分 类 号 :P3 9 T 9 文献标志码 : A d i1 .9 9 ji n 17 -07 2 1.5 0 6 o:0 3 6/.s .6 32 5 .0 2 0 .0 s
t e n x st n c o d n ot e gv n r b b l y b h e po s un to h e tpo ii s a c r i g t h ie p o a i t y t er s n ef cin.I h i l to x e i n s d fe — o i n t e smu ain e p rme t , i r f e tv l e fr s o s h e h l n r b t n h u e s o o os a e s tup Ac o dng t he e a u to t n au s o e p n e t r s o d i o o s a d t e n mb r fr b t r e . c r i o t v l ain me - rc t e u t fe p rme r v l ae n n y e is,her s lso x e i nta e e au td a d a a z d.Th e u t h w h tt lo ih i f c e n e s- l er s lss o t a hea g rt m se inta号 的录像 设 备 、 监视 器 及 记 录 设 备 。模拟 数 字 混 合 视 频 监 视 系统 在 前 者 的基 础
上做 了改 进 , 视 频 储 存 介 质 升 级 , 用 光 盘 或 者 将 使
基于ARM9的嵌入式PLC系统的设计与实现

嵌人式 P C是 由嵌入式微控制器硬件开发平 L
台和嵌 入式 Ln x 作 系统构 成 的 ,通 过 开发 硬件 iu 操
图 2 嵌入式 P C硬件结构 图 L
设 备驱 动程序 ,将驱动 程序 加载 到嵌 入式 系统 的 内
设 备 的注册 ;模块 在调 用 r m d命 令 时被 卸载 , m o 此
模块 、/ AD模块 、WM模块 , P 其中 P C的 I L / 0模块主 要用于 P C的开关量的输入与输 出。 L
3 嵌入 式 P C的软件 系统 L
其主频可达 23 H , 0 M z具有速度快 、 功耗小 、 体积小、 可靠性高、控制功能强大等优点 ,外 围扩展了 1M 6 的 F A H 6 M的 S R M和一些通用接口。 L S 、4 DA 通用接 口为 R -5以太网 口、 S 2 2 口、 S 设备接 口、 J4 R 一3 串 UB
应 用 层
厂
系统、 图形用户接 口、 任务管理等。驱动层和软件层
应用 程 序
文件系统 软件层
图形用户接 口
( UI G )
任务管理 嵌入式
Ln x iu 操
嵌入 式Ln x i u
驱 动层
S R M、F A H、I 模块、A 、 D A L s / 0 DC P wM 、通用 接 口等 片 内外 设驱 动
驱 动层 、 软件层 、 应用 层构 成 。硬件层 为 系统 的最底 层。 驱动层 是软件 层 与硬件层 之 间的桥梁 。 件层在 软 驱 动层 的基 础上 开发 。 括嵌 入 式 Lnx内核 、 包 iu 文件 构成嵌 入式 Lnx操作 系统 。应用 层 根据 P C的控 iu L 制要求 。 现 P C的控 制功 能。 实 L
基于ARM9的嵌入式网络数据采集系统的开发

以提 供 E h re 的接 入通 道 。在 此选 用 了 DM9 6 E t en t 1 1
常工作 。当需要 使用 服务器 资源 时 ,就从工作 站远 程
登 录到 L n x服 务器 , iu 进行 需要 的操作 。 入式 Ln x 嵌 iu
物理层 接 口芯 片 ,该芯 片提供 MI 接 口和传 统 7 制 I 线
作 者 简介 :林 小 军 (9 9) 男 , 肃 通 渭 人 , 师 。 17一, 甘 讲 工学 硕 士 , 主要 从 事 焊 接 过 程 监 控 及 嵌 入 式 l u i x设 备 的 开 发 研 究 工 作 。 n
・1 2・ 6
机 械 工 程 与 自 动 化
21 0 0年 第 4 期
嵌入 式 L n x网络 数据 采集 系统 由许 多功 能相 似 的终 iu
端组 成 ,这 些终 端都 可 以挂在 同一 条 网络上 。
图 2 ARM 中 心 控 制 模 块 框 图
1 1 1 E h r e 通 信部 分 . . ten t 其 通信 部分 连接 嵌 人式 In x远 程数 据采 集终 端 u i
1 1 ARM 中心 控 制 模 块 .
AR 中心 控制模 块 控制 整个数 据 的采集 、传输 。 M 从 采集 系统 传 输 过 来 的数 据 保 存 在 Na df s n l h中 以 a
收 稿 日期 :2 0 一22 ;修 回 日期 :2 1 —22 09l —8 0 00 —0
1 系统硬 件设计
AT9 R 2 0处理 器 、 TAG 接 口、网络模 块 、 1 M9 O J 4MB
No a h、 3 B dr m 、 6 B n a h、USB r Fl s 2M S a 4M Na d Fl s
基于ARM9的嵌入式数控系统

TOUT0 GND LED1 GND TOUT0 GND LED1 GNDTOUT0 GND LED1 GNDGPIO信号地232OPF光耦RDARDBSDASDBSGFRE500 232OPF光耦232OPF光耦232OPF光耦S3C2440PF+PF-PR+PR-SEDA-02AVNPF+PF-PR+PR-SEDA-02AVNPF+PF-PR+PR-SEDA-02AVNUVWGNDUVWGNDUVWGNDUVWGNDM1M2M3M4PEPEPEPE图1系统原理图来控制电机。
根据加工线型的不同,本数控系统的插补计算分为圆弧插补、直线插补计算。
3结语采用S3C2440和运动控制芯片SEDA -02AVN 组成的嵌入式数控系统能减轻研发任务,提高研发速度,在较短的时间内得到性能良好的数控系统。
Samsung 公司的16/32位RISC 处理器S3C2440对调制PWM 实现方便,可编程,电机转速、转向的改变迅速,无停顿,还可以进行Linux 操作系统的移植。
而Linux 是UNIX 类、多用户、多任务的开放式操作系统,借助Linux 操作系统,大大提高了软件开发的灵活性,缩短了数控系统软件的开发周期。
[参考文献][1]韦东山.嵌入式Linux应用开发完全手册.北京:人民邮电出版社,2008[2]杜春雷.ARM体系结构与编程.北京:清华大学出版社,2003[3]刘刚,赵剑川.Linux系统移植.北京:清华大学出版社,2011[4]秦云川改编.构建嵌入式Linux系统.北京:中国电力出版社,2011[5]刘淼.嵌入式系统接口设计与Linux驱动程序开发.北京:北京航空航天大学出版社,2006[6]于明,范书瑞,曾祥烨.ARM9嵌入式系统设计与开发教程.北京:电子工业出版社,2006[7]S3C2440芯片手册[8]TQ2440开发板使用手册收稿日期:2012-08-08作者简介:程龙(1987—),男,辽宁沈阳人,硕士研究生,研究方向:机械电子。
基于单片机的GPS定位系统设计【范本模板】
基于单片机的GPS定位系统设计摘要GPS是全球定位系统英文名词Global Positioning System的缩写.该系统是美国布设的第二代卫星无线电导航系统。
它能为用户提供全球性、全天候、连续、实时、高精度的三维坐标、三向速度和时间信息.其目的是在全球范围内对地面和空中目标进行准确定位和监测。
现在,GPS接收机作为一种先进的导航和定位仪器,已在军事及民用领域得到广泛的应用。
本设计是基于AT89C51单片机来实现的简易GPS定位信息显示系统。
本控制系统主要完成接受数据、时间显示、经度显示、纬度显示等常规功能.此方案基于单片机、GPS模块和12864液晶显示屏等硬件,并应用C语言实现了GPS信号的提取、显示及基本的键盘控制操作等。
经过实践测试,这种接收机可以达到基本GPS信息的接收以及显示,可以做到体积小、精度高、连续导航,并可广泛应用于个人野外旅游探险、出租汽车定位及海上作业等领域。
关键词:GPS定位系统,单片机,液晶显示屏DESIGN OF GPS RECEIVER BASED ON 51 SINGLE CHIPCOMPUTERABSTRACTGPS is the abbreviation of the English term Global Positioning System global positioning system. The system is the United States laid the second generation satellite radio navigation system. It can provide users with continuous, real—time,global, round—the—clock,high precision three dimensional coordinates, three velocity and time information. Aimed at targets on the ground and in the air around the world an accurate positioning and monitoring。
Linux下基于ARM9的嵌入式视频循环采集监控系统

I 据构I J始重 I 初化要 数结
av
_
w ie ha e 0 rt _e dr
—
2 V d o Ln x视频 采集标 准 ie 4 i u 。 】
Vdo L u ie 4 m x是 L x系统视频采集软件 的总接 口。各 mu 种网络摄像 头, 视频采集卡 ,电视卡 以及类似 的设备均归类 于视频采 集领域 ,Vd oL x 为此 提供 了一整套相 应的 ie4 mu AP I接 口。由于各个设备均有 自己独立 的特性 ,Unx系统 i 均在此基础上进行了抽象,本着一切均是文件的设计思想 , 只需要进行 oe ( pn) 方法 即可打开设备文件 ,ra Owre ed / iO分 t 别是对该设备进行读 写传输数据 ,ic ( o t) l 则是对设备参数配
置。
av
— —
w t ri e
Mi o o ue A p c t n V 1 6 N ., 0 0 c c mp t p f a o s o 2 , oS 2 1 r r i i .
文 章 编 号 : 10 -5)(0 080 3 —3 0 77 7(2 1)—0 50
开发应 用
微型 电脑 应 用
21 0 0年第 2 6卷 第 8期
3 采用 F mpg库 实现视 频数据 存储 F e
F mpg是一个集录制 、转换、音, F e 视频 编码解码功能为 体的完整 的开源解决方案。F mp g的开发是基于 L u F e mx 操作系统 , 但是可 以在大多数操 作系统 中编译和使用,包括 wno id ws系 统 等 。F mpg支 持 MP G、DiX、MP G4 F e E v E -、 AC 、 3DV、L F V等 4 0多种编码 , V 、 P G、 G Ma ok 、 A IM E O G、 t sa r AS F等 9 种 解 码 。 O多 F mpg库支持多平台运行,包括 L x F e mu 、Wid ws n o 和 M OS等系统 。 a c 本设计将 F mp g移植到 AR F e M9架构的系 统上 ,通过交叉编译 生成运行库【。 4 j 31 基于 F mpg的视频处理技术 F e F mp g 主 目录 下 主 要 有 U a cdc l afr a F e bv o e 、 i vom t和 b l aui i vt b l等 子 目 录 。 其 中 h ac dc 用 于 存 放 各 个 b vo e e c d/eo e模 块 ,l afr a noe cd d i vom t用于存放 mu e/e xr b xr mu e d 模块,l aui用于存放 内存操作等常用模块。 i vt b l 利用 f e mp g库生成视频文件 ,需要用到两个贯穿始终 的数据结构 :s ut V oma o t t s ut V t a t cA F r t ne 和 t cA Sr m。 r C x r e
基于ARM9处理器的车载信息系统的设计
第1卷 0
1 期 2 8第月 0 年12 0 2
蘧钎鎏 孝
V. o2 o0N1 1 . 1
De c.2 8 o0
AI O N
间 、里程 ,从 而为 主管 部 门对车 辆及 管理 员 的管
AI N1
理 和调度 提供 科学 的依 据 .提高企 业 的安 全生 产
周 晓 平 ,王 春 旭 ,李媛
( 西安 电子科技 大 学机 电工程 学院 ,陕西 西安 70 7) 10 1
摘 要 :提 出了基 于A M9 R 处理  ̄¥ C 4 1 0 和In x 作 系统 的车 载信 息 系统 的设 计 方案 , 3 2 0 X 1 Ju 操 i
介 绍 了车 载 信 息 系统 的 硬 件 设 计 结 构 和 软 件 设 计 方 法 ,给 出 了行 车 记 录 信 号 和 车 载 系统 行 车
提供 安全 、环保 及舒 适性 功能 和服 务 的汽 车 电子 设 备 .也 是智 能汽 车 的组成 部分 ,也 可 以叫 汽车
电子 装 置 。
图 1 车 载 信 息 系 统 硬 件 结 构
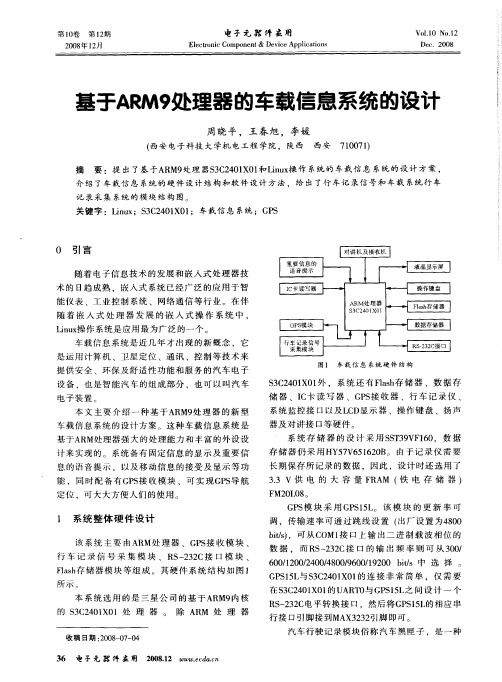
¥ C 4 1 0 外 ,系 统 还 有 Fah 储 器 、数 据存 3 2 0X 1 ls存 储 器 、I 卡 读 写 器 、G S 收 器 、行 车 记 录 仪 、 C P接 系统 监 控接 口以及L D显示 器 、操 作键 盘 、扬 声 C
¥M0 器I I : :: A2 恶1 34l — ::: : R X C 0 := :
I 里 堡 卜 I . 。 —. 塑 堡 l 竺 垫 ] 。 卜 . 1塾 墨
l 羹鬟 }L tt— [ 圃 行 震号— j L — 垂 橐 _ -三 —
I .. .. .. .. - ... .. .. . . J .. .. ... . ._
基于WinCE的嵌入式平台的研究与实现的开题报告

基于WinCE的嵌入式平台的研究与实现的开题报告第一部分:研究背景和研究意义1.1研究背景嵌入式系统,也称为嵌入式设备,是一种特殊的计算机系统,它通常用于控制、监视或执行简单任务。
嵌入式系统往往需要高度可靠、节能和实时性能。
WinCE(Windows CE)是一个基于微软Windows操作系统的嵌入式操作系统,它被广泛应用于许多嵌入式系统中。
WinCE操作系统与Windows桌面操作系统相似,同时也支持多线程调度、多任务和图形用户界面等功能。
WinCE操作系统支持多种处理器体系结构,例如x86、ARM和MIPS等。
WinCE操作系统还具有高度可裁剪性,可根据具体需求定制。
随着新型嵌入式应用设备在数量和种类上的不断增加,人们对高度可靠、携带型、节能和实时性能的需求越来越大。
WinCE操作系统已成为许多嵌入式应用设备的首选操作系统。
因此,研究WinCE操作系统在嵌入式平台中的应用具有重要的意义。
1.2研究意义本研究旨在研究和实现基于WinCE的嵌入式平台。
具体来说,该研究将从以下几个方面展开:(1)了解WinCE操作系统的基本构成和体系结构,掌握WinCE操作系统的启动过程。
(2)研究嵌入式平台的软硬件环境,包括处理器架构、内存、外设、交叉编译工具链等。
(3)研究WinCE操作系统在嵌入式平台中的适配和移植方法。
(4)设计并实现一个基于WinCE的嵌入式应用程序,该应用程序能够在嵌入式平台上实现相应的功能。
本研究的意义在于:(1)可以深入了解WinCE操作系统的体系结构和应用领域,提高嵌入式系统的开发能力。
(2)可以加深对嵌入式系统软硬件环境的理解和应用,提高实时性能和可靠性。
(3)可以为WinCE操作系统在嵌入式领域的推广和应用提供技术支持和指导,为相关产业的发展起到积极的作用。
第二部分:研究内容和研究方法2.1研究内容本研究主要研究基于WinCE的嵌入式平台。
具体内容如下:(1)WinCE操作系统的基本构成和体系结构。
基于ARM9的车载信息服务系统设计
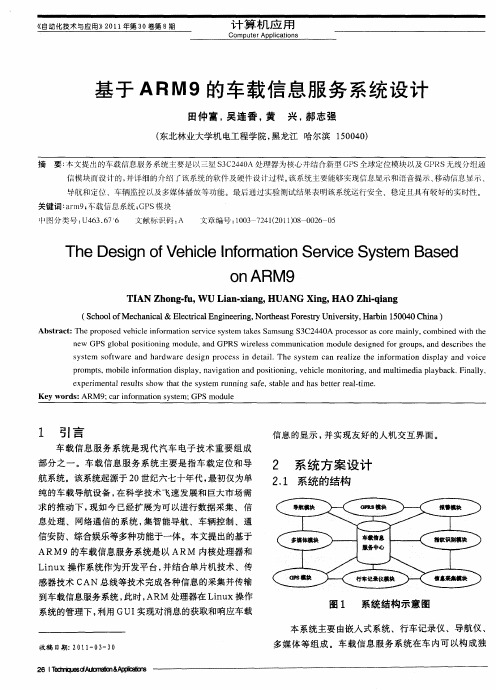
感器 技术 CAN 总线等 技术完成各 种信息 的采集并 传输 到车 载信息服务 系统 , 此时 , ARM 处理器在 L n x操作 iu 系统 的管理 下 , 利用 GUI 实现对消 息的获取和 响应车载
图 1 系统 结构 示意 图
《 动 技 与 用 2l年 3卷 期 自 化 术 应 》01 第 0 第8
计 算 机 应 用
Compu er t pl a i n Ap i to s c
基 于 ARM9的车载 信息 服务 系统 设计
田仲富 , 连香 , 吴 黄 兴 , 志 强 郝
( 东北林业大 学机 电工程学 院 , 黑龙江 哈尔滨 1 0 4 ) 0 0 5
s s e s fwa e a a d a e d s g r c s n de a l Th ys e c n r a i e t e i f r to i p a n o c y t m o t r nd h r w r e i n p o e s i t i. e s t m a e lz h n o ma i n d s l y a d v i e po r mp s mo ie i f r t n d s l y n v g t n a d p st n n , e i l n t rn , n u t e i l y a k F n ly t, b l n o ma i i p a , a i a i n o ii i g v h ce mo i i g a d m l m d ap a b c . i a l , o o o o i e p rm e a e u t h w h t h y t m u n n a e s a l n a e t rr a —i . x e i ntlr s l s o t a e s se r n i g s f , t b e a d h s b t e ltme s t e Ke r s ARM 9 c ri f n a i n s se ; y wo d : : a n o n to y t m GP d l S mo u e
基于ARM处理器的GPS导航系统设计报告
基于ARM处理器的GPS导航系统设计报告姓名:班级:学号:基于ARM处理器的GPS导航系统设计报告一、需求分析1、问题的提出随着我国经济水平和时代的快速发展,汽车行业也蓬勃发展起来。
汽车的增长速度远远超过公路的增长速度,汽车拥有量的急剧增加和城市现代化交通建设的相对滞后导致城市交通情况不断恶化。
同时,现代物流对运输车辆和货物安全与准时调运的要求、公交与出租车的运营管理、大型的企事业单位日常车辆管理也都对车辆的监控与导航有迫切的需求。
面且随着旅游行业的发展,人们急需要一种可以随时随地知道自己方位和目的地的方便设备。
2.、可行性的分析GPS(全球定位系统)具有全球、全天候工作,定位精度高,功能多,应用广的特点,通过GPS接收机可以实现精确的自主定位,这为实现车辆的定位和导航奠定了基础。
伴随ARM处理器、嵌入式操作系统、路径优化控制算法和GPS 网络的成熟,车辆定位导航系统有了新的发展,可以在短时间内实现定位和最优路径导航。
本项目在信息系统终端的设计中采用了ARM处理器和嵌入式操作系统uC/OS-II(专门为计算机的嵌入式应用设计的,绝大部分代码是用C语言编写的。
)作为开发平台,通过采用ARM处理器可达到最大为60MHz的CPU操作频率,使得数据处理能力大大加强,同时,基于嵌入式操作系统uC/OS-II开发设计的软件具备了很强的扩展性和稳定性。
二.规格说明二、规格说明该嵌入式GPS导航系统由GPS系统获得当时所在的位置的经纬度,通过换算和地图匹配在地图上得到当时的实际位置,然后由用户输入目的地,通过最短路径算法计算最短路径并在矢量地图上显示,同时提取GPS提供的速度,时间等信息显示在屏幕上。
1.需要采用的设备本嵌入式GPS导航系统的硬件核心是意法半导体ARM7系列中的16/32位RISC处理器STR710FZ2T6芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合嵌入式系统的开发,本系统正是基于该芯片的这些特点面设计的。
基于ARM9的车载智能导航终端设计
APPLl CATl NS o
基于A
摘 要 :介 绍 了作者 自行 研 制 开 发 的车 载 智 能导航 终端 系统 的设 计 思 想 、 系统组 成 、功 能结 构及 特 点 , 同时讨论 了未来 车载智 能 导航 终 端 系统 的发
车 载 智 能 导 航 终端 的 功 能
车载 智 能导 航 终端 应 具 有如 下 功
能:
增 加 娱 乐 功 能 ,或 通 过 U B接 口连 接 S 数 据 获 得 当 前 所 处 位 置 的 经 度 和 纬 图像 采集 设 备 以对 车 内外进 行 视频 监
度 、运 动 速度 、标 准 时 间 以及 海拔 高 控 等 。 度 等信息 ; ()网络 通信 ,采 用 G R 无 线 上 2 PS 网方 式 ,控制G R 模 块 拨号 上 网 ,连 P S 接 监 控 中 心 , 以实 现 G S 据 及 监 控 P数 中心命令 数据 的 双向传 输 ; ()安 全 防 盗 ,在 车 辆 被 盗 时 通 3
展 方 向。
计
关键 字 :全球 定位 系统 ;车载 导航 ;嵌入 式 系统 ;A M R
朱振 涛 王成 儒 燕山大学电 子与通信工 程系
引 言
车 载导 航 终端 系 统是 汽车 电 子技 术 的 重要 应用 领 域 ,是 智能 交 通 系统 (1 IS 1 )的重 要 组 成 部 分 。近 年 ,随 着 汽 车 数 量 的 增 加 、汽 车 电 子 及 IS T 的 兴 起 ,车 载导 航 终端 的开发 研 制得 到 很 快 的发 展 。同 时 ,随 着软 硬 件 资 源 的成 熟与 完 善 ,嵌 入式 系统 的应 用 得 到 了迅猛 的 发展 ,其 应 用领 域 涉 及 通 信 、 自动 化 、信 息家 电 、军 事 等 各各 方 面 。嵌 入式 系统 的广 泛应 用 前 景 和
基才ARM9与WindowsCE的车辆GPS定位信息采集系统

d t s rn mie fo aa wa t s t d rm te a t h GP rc iig e ie t mirpo e sr ho g te S e evn d vc s o co rc so tru h h RS 3 sr l ot GP 2 2 e a p r.S RMC , i S GGA Wa n lzd t an ltu e ln i d d t t n lv t n G GS w s a aye o g i h iil GP s a aye o g i ai d ,o gt e, aa,i a d ee ai .S P V a n lzd t an te vs e t u me o b
Daa a qu sto s fwar s d e o e i h DE t c ii n o t e wa ev l p d n t e I i Embe d s lC ++ ba e he FC e hn lg d ed Viua s d on t M tc oo y.GP o gna S r i l i
u nxn WA G G a gl g C E i —u , I O Z o g a We-i, N un — n , H NJa h i QA hn — o o n t
( eat etfMi i n ier g O d ac n ne n ol e S  ̄ah ag0 0 0 , hn ) D p r n s l E gn ei , rnn eE ge r gC l g , h i un 50 3 C i m o se n i i e z a
wa c n tu t d,w ih u e ¥ C 4 0 mir p o e s r a a d r l t r c r n i d ws E a ot r l t r . ¥ o sr ce h c s d 3 2 4 c o r c s o s h r wa e p a o m o e a d W n o C s s f f wa e p a f m o
深圳大学二〇一〇年度实验室开放基金立项项目一览表
第 2 页,共 14 页
编号 2010085 2010086 2010087 2010088 2010089 2010090 2010091 2010092 2010093 2010094 2010095 2010096 2010097 2010098 2010099 2010100 2010101 2010102 2010103 2010104 2010105 2010106 2010107 2010108 2010109 2010110 2010111 2010112 2010113 2010114 2010115 2010116 2010117 2010118 2010119 2010120 2010121 2010122 2010123 2010124 2010125 2010126
资助金额 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,000.00 ¥1,100.00 ¥1,100.00 ¥1,100.00 ¥1,100.00 ¥1,000.00 ¥1,000.00 ¥1,100.00 ¥1,000.00 ¥1,100.00 ¥1,000.00 ¥1,000.00 ¥1,100.00 ¥1,100.00 ¥1,100.00 ¥1,100.00 ¥1,000.00 ¥1,000.00 ¥1,100.00 ¥1,100.00 ¥1,000.00
基于WinCE车载导航系统定位功能的实现
<7 <8 , > , 0 , l hh<CR><LF> >, > <9 <1 > <l >*
4 GP S导航 信 息 的接 收
操作 系统与硬件 平台 间采用 串 口进行通讯 , 以首 所 先要对 串口进行设置 。e VC在实现串 口数据通信 中存在 2 个局限性 : 一是 e VC不支持 串口通信控件 MS o c mm, 另 外 , n E不支持重叠 I O操作 。因此 , Wi C / 要采用 Wi C n E API函数 和多线程技术进行数 据串 口通信 的底层开 发。 Wid ws AP 函数将 串 口视为文件 , no I 对于 串口的操作类 似于对 于普通 文件 的操 作 。在 e 环境 中, VC 通过调 用 C e tF l 函数来打开串 口, ae i r e 设置读写模式{: 2 】
下几种 语句 :
务 、完全抢 占式的 3 2位嵌入 式操作系 1支持 Wi E , nC
MF 、A L C T 、Wi C I n E AP 和一些附加的编程接口以及各 种通信技术。开发工具采用 e ( e d d vsaC + , VCe d e i l + ) mb u 它是 Wid ws E上的主流开发工具 , n o C 封装了网络底层 通讯、C M 互操作 、RA I O P 等。e VC支持 MF C类库的子 集 , W i 2平 台上 的 VC程 序可以很容易地迁移到 使 n 3
G S接收机是通过 RS 3 P 2 2串口将定位信息传送到处 理器 的, 以在应用程序 中 , 口设置完成 以后 , S接 所 串 GP 收机 只要处于 工作状态 , 就会源源 不断地把导航 定位信
基于ARM9的GPS导航系统设计

Ke r s 3 24 ;Ln x G S Q ywod :¥C 40 i ; P ; t u
0 引 言
G S技术 凭借其 全天 候 、 P 高精 度 和 自动 测 量 的优
势, 融人 了社 会发 展 的各 个应 用 领域 , 包括 车辆 导 航 、 大气物 理观 测 、 球物 理资 源勘探 、 程 测量 、 地 工 变形 监 测 、 政 规划 控 制 、 市 最佳 航 程 航 线 测定 、 飞机 导 航 、 低 轨 卫 星定轨 等 。
2 1 第 6期 0 2年 文章 编 号 :0 62 7 (0 2 0 -1 1 3 10 — 5 2 1 )60 4 - 4 0
计 算 机 与 现 代 化 JS A J Y I N A H A IU N I U X A D I U
第 22期 0
基于 A M R 9的 G S导航 系统设 计 P
作 为 导航 、 定位设 备 , P G S终 端 机 不 仅 需 要 可 靠 的性 能 , 应 具备 便 携 、 功耗 和 低 价 格 的优 点 ¨ 更 低 。。
采 用 基于 A M 的微处 理 器 与 G S模 块 相 结 合 的硬 R P
摸液晶等人机交互接 口 部分的设计 , 用户能够通过触
古丽 米拉 ・ 克孜 尔别 克 , 张婧婧 , 李勇伟
( 新疆农业 大学计 算机 与信 息工程学院 , 疆 乌鲁木齐 8 05 ) 新 3 0 2
摘要: A M 以 R 9为嵌 入 式 开发 环 境 , 植 Lnx操 作 系 统搭 建 软 件 平 台 , 面 论 述 采 用 ¥ C 4 0和 G S模 块 相 结 合 设 计 移 iu 全 324 P
ee t n c ma s a d GP a a n o d rt ipa n v h S n v g t n ma sf ra h e i gt e p r o e o a—i o a l cr i p n S d t ,i r e d s ly a d mo e te GP a i ai p o c ivn u p s f e t o o o h r l mel c —
基于ARM9及GPRS的警用车载读写系统的设计
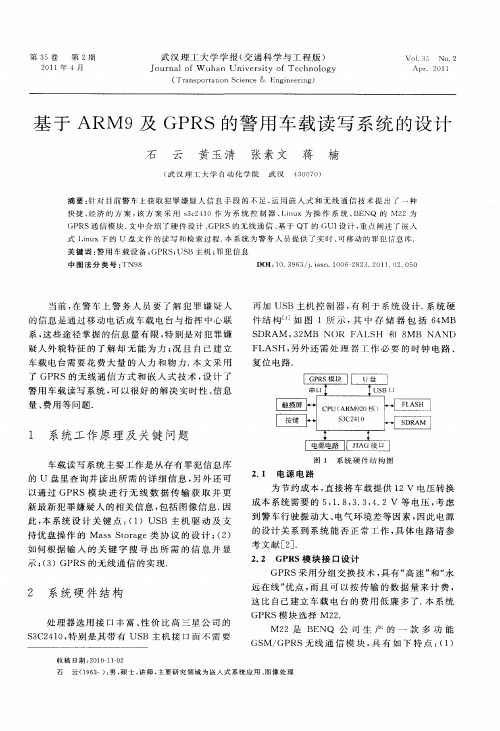
F AS , 外 还 需 处 理 器 工 作 必 要 的 时 钟 电 路 、 L H 另 复 位 电路.
1R 块l U S 盘I G模 f P 二 u
匝匾 c A 2 ) F S o L H] 核 A
l } 堡 ¨ 1 L
系统 工 作 原理 及 关键 问题
一
J
ห้องสมุดไป่ตู้
L — —
『 源电 lJ G接口 l 电 路 l2 A
图 1 系 统 硬 件 结 构 图
2 1 电 源 电 路 .
为 节 约 成 本 , 接 将 车 载 提 供 1 电压 转 换 直 2V 成 本 系 统 需 要 的 5 1 8 3 3 4 2V 等 电 压 , 虑 ,. ,. , . 考
式 Iiu n x下 的 U 盘 文 件 的读 写 和 检 索 过 程 . 系 统 为 警 务 人 员 提 供 了实 时 、 移 动 的罪 犯 信 息 庠 . 本 可
关 键 词 : 用 车 载设 备 ; P S US 警 G R ; B主 机 ; 罪犯 信 息
中图法分类号 : TN9 8 DOI 1 . 9 3 j is . 0 62 2 . 0 1 0 . 5 :0 3 6 /.sn 1 0 8 3 2 1 . 2 0 0
的 信 息 是 通 过 移 动 电 话 或 车 载 电 台 与 指 挥 中 心 联
系 , 些途 径掌握 的信息量 有 限 , 这 特别 是 对犯 罪嫌 疑人外 貌特 征 的 了解 却 无 能 为力 ; 且 自己建 立 况
车 载 电 台 需 要 花 费 大 量 的 人 力 和 物 力 . 文 采 用 本 了 GP RS的 无 线 通 信 方 式 和 嵌 入 式 技 术 , 计 了 设 警 用 车 载 读 写 系 统 , 以很 好 的 解 决 实 时 性 、 息 可 信 量 、 用 等 问题. 费
车载嵌入式视频监控定位系统

On — b o ar d Embe d d ed Vi d eo Mon i t or i n g a n d Po s i t i on i n g Sy s t e m ̄
分 线 路 。当前 远程 车 辆 监 控 系 统 存 在 数 据 传 输 速 度 慢 、 不 能及时全面反馈整车运行状态信 息、 不 能 满 足 视 频 和 语 音
]
l l I l l
J
等其他多媒体功能的缺点口 ] 。为 了 提 高 公 交 智 能 化 程 度 , 方便公交管理 , 本 文设 计 了 一 个 无 线 视 频 监 控 与 定 位 结 合 的 系统 。此 系 统使 用 视 频 压 缩 技术 , 通 过 无 线 网 络 Wi F i 和 3 G 网络 利 用 R T P协 议 来 传 输 实 时 视 频 流 , 并利用 我 国 自
c a t i o ns .
Ke y wor ds: H . 26 4;c o m pa s s ; G PS; 3 G; W i Fi ;v i de o s u r v e i l l a nc e
引 言
目前 我 国实 现 智 能化 公 交 的城 市 寥寥 无 几 , 虽 然杭 州 、 长沙 、 武汉 、 佛 山等 城 市 已经 出 现 智 能 公 交 , 但 也 仅 仅 是 部
Wa n g Zh o n g y o n g,Zh a o Yi d o n g . Li Ya q i o n g ( S c h o o l o f I n f o r ma t i o n En g i n e e r i n g,Z h e n g z h o u Un i v e r s i t y,Z h e n g z h o u 4 5 0 0 0 1 , Ch i n a )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
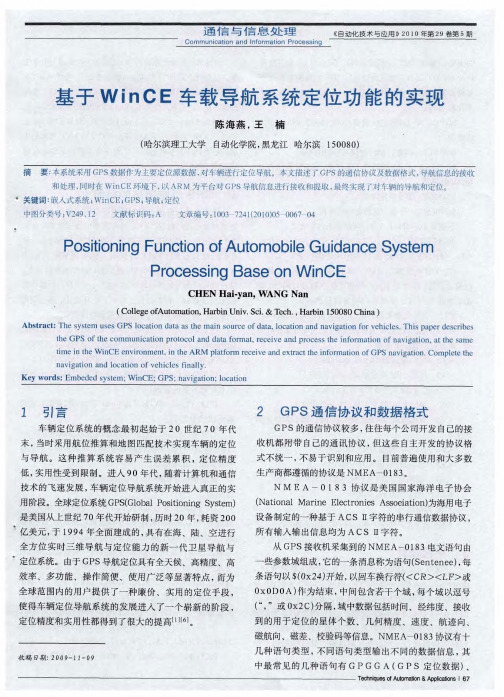
GPS可提供连续、高精度、实时的时间基准、三维位置、三维速度、整周模糊度等数据,具有性能好、精度高的特点,因而广泛应用于GPS载波相位测姿、精确制导、SINS/GPS 组合导航、嵌入式车辆导航监控等军事与民用领域。
而嵌入式系统以其低功耗、小体积、高稳定性和便携等优势,在GPS的应用中占据重要的位置。
本文研究基于arm920T内核的嵌入式微处理器S3C2440和WindowsCE 5.0(简称WindowsCE)的某型军车GPS定位信息的采集与处理。
1 系统硬/软件平台概述车辆GPS定位信息采集系统的硬件平台结构如图l所示。
该平台可以分为3大模块:1)微系统核心模块由基于arm920T的32位嵌入式微处理器S3C2440、SDRAM和Nand Flash构成和总线接口构成。
2片32 MB的HY57V构成64 MB的SDRAM存储器,用于运行系统主程序。
存储容量为64 M×8 bit的Nand FlashK9F1208UOM,因其具有掉点保护功能,用于存储操作系统内核、Bootloader的启动代码和用户程序。
2)GPS原始数据接收模块由一台遵循NMEA-0183协议标准的GPS接收机和PS天线组成。
通过外接GPS接收机,将接收到的GPS原始信息,送入到嵌入式微处理器进行数据解析,最终得出战车所在位置的位置、速度和海拔等信息。
3)外设控制模块包括LCD+触摸屏、USB主/从口、电源、JTAG调试接口、复位电路。
选用东华的自带4线模拟电阻式触摸屏和硬件驱动的3.5#TFT型LCD,用于人机交互以及现实解析后的GPS信息。
USB主口用于扩展U盘,用于数据存储,从口用于下载WinCE内核文件以及与软件开发主机进行数据交互,JTAG调试接口用于硬件调试以及烧载Bootloader。
软件平台为微软公司的嵌入式操作系统WindowsCE,它界面友好,支持嵌套中断、更好的线程响应、更多的优先级别;支持串口和网络通信;具有丰富的API函数,具有强大的开发工具;多硬件平台支持,支持arm、MIPS等处理器。
经过Platform Builder定制移植的WindowsCE操作系统如图2所示。
2 定位信息数据格式GPS的输出数据遵循NMEA-0183协议标准,即美海军的电子设备标准。
根据NMEA-0183协议,获取GPS定位信息,必须将串行口的波特率设置为4800b/s,数据位设置为8 bit,停止位设置为1 bit,校验为设置为无。
该协议定义了GPS接收机输出的标准信息,最常用、兼容性最广的语句格式包括:$GPRMC、$GPGGA、$GPGSV、$GPGSA、$GPGLL等。
应用到的GPS数据格式包括$GPRMC、$GPGGA、$GPGSV三种。
其中,用$GPRMC语句获取时间、经纬度、速度、年月日信息,用$GPGSV语句获取海拔高度信息,用$GPGSV语句获取可见卫星数信息及卫星的方位角和仰角信息,用以获取卫星的视图。
各语句的数据段的含义,参考NMEA-0183协议标准。
3 GPS定位信息采集和处理的软件实现本系统的软件开发在可视化开发工具Embedded VisualC++(简称EVC)中,采用MFC 编程技术实现。
3.1 GPS数据处理状态转换GPS与arm之间用RS232串口方式进行通信,串口对象负责接收数据,并把接收到的数据放置到串口缓冲区。
GPS对象按照协议结构负责处理串口对象接收到的数据。
图3为GPS数据处理之间的状态转换示意图。
GPS数据处理状态共包括4个状态:开始状态、数据帧头状态、GPS数据正文状态和校验状态。
开始状态是一个数据帧的起始状态,它处理和判断数据帧的起始字符$。
若起始符号不是其中的$,则一直停留在开始状态,直到$到来位置,数据帧头状态用于判断数据帧的格式是否与我们目前需要的目标数据帧相匹配。
如果相匹配,那么将退转到下一个状态:GPS 数据正文状态,开始进行数据处理。
如果不匹配,则转移到开始状态。
数据处理中用到了缓冲区的概念,它一边累积计算接收的数据的异或和,一边把相应的数据域送入缓冲区。
这样既降低了数据提取校验的复杂度,也提高了数据处理的延续性和正确性。
当GPS数据正文状态完成,进入“*”字符的时候,将进入数据校验状态,它用于判断数据接收和处理的有效与否。
若校验成功,则接收有效,收到CR,LF字符后又重新跳转到开始状态。
若校验失败,则放弃处理的数据,直接跳转至开始状态。
3.2 完整GPS数据帧的截取了解了GPS数据处理的四个状态之间的相互转换,下面论述一个完整的GPS数据帧的提取和处理,它是获取车辆GPS定位数据的关键。
一个完整的GPS数据帧的提取流程如图4所示。
图4中,m_strRecDisp为一个CString变量,用于表示接收数据的字符串,该程序流程中,用到两个最重要的函数即:字符(串)查找函数和字符串截取函数。
1)字符(串)查找函数该函数CString∷Find()用于从一个已有的字符串当中查找与目标字符(串)相匹配的首次出现的一个单字符或一个子字符串。
一个重要的函数原型为:int Find(TCHAR ch,int nStart)const:其中,ch为要查找的目标字符,nStart为开始查找位置。
2)字符串截取函数该函数CString∷Mid()用于截取一个字符,也可从一个具体位置开始截取一个子字符串,返回值即为字符或字符串常量。
函数原型为:Mid(int nFirst,intnCount)const;其中nFirst为字符串开始截取的位置,nCount为截取字符数目。
3.3 GPS数据帧的处理截取出一个完整的数据帧后,将数据帧赋值给CString变量data,data再将其字符内容渊源不断的送给缓冲pBuffer,解压缩数据帧后,进入到如图5所示的GPS数据帧处理流程。
在处理GPS时间数据时,因为北京位于东八区,UTC时间与北京时间相差8 h,得到UTC时间后,如果要得到标准的北京时间,应在此时间的基础上,加上8 h。
3.4 二维卫星视图的获取卫星视图的获取首先要用到站心切平面坐标系。
坐标系如图6所示,站心切平面以P 点的法线为Z轴且向上为正,X轴垂直于Z轴并指向北极.Y轴垂直于Z轴并向东为正。
显然,若卫星P与观测点之间的距离为r,E为任意可见卫星P的仰角,B为卫星的方位角,则P的三维坐标为(X,Y,Z)满足:因为绘制的是二维图形,故只能将半球坐标系压缩到观测者所在的平面内(称这个面为基础面),图上所表示出的卫星的位置实际为卫星在该平面的投影点,该坐标系的参数有2个,一个是表达卫星的投影点和观测者的方位关系的方位角;另一个是表达卫星真实所在位置以基础面为准与观测者所构成的仰角关系的仰角。
有了这2个参数就能在该坐标系中唯一确定一个具有物理意义的点。
本系统设计中,设计简单的坐标系,它有2个同心圆和4条直线组成。
绘制出卫星视图之前进行的简单的坐标变换算法思想为:将卫星实际的方位角、仰角立体坐标转换为平面内的横纵(PX、PY)坐标,具体表示如式(2)所示。
其中,(POX,POY)分别为两同心圆原点(看作是观测点)在LCD上的像素坐标,而T为对话框窗体客户区长度的1/4。
3.5 串口接收的实现完成GPS定位信息的采集,需要实现的串口主要的API函数包括:1)打开串口函数。
原型为Open(LPT OpenPort(LPCTSTRPort,int BaudRate,int DataBits,int StopBits,int Parity)。
其中,Port代表串口名,如COMl等,BaudRate为波特率,DataBits为数据位;StopBits为停止位,Parity为奇偶校验。
2)关闭串口函数。
该函数在程序操作串口发生错误时使用,用于关闭该串口。
实现的主要方法是:先判断串口操作句柄hComm的值是否为INVALID_HANDLE_VALUE,如果是,则调用SetCommMask(),将上述代码段中的EV_RXCHAR改为0,然后清除缓冲区,再利用CloseHandle函数关闭串行口操作句柄。
3)添加打开串口单击事件代码,通过创建一个串口接收线程和显示线程来实现。
4)串口接收线程CommRecvTread()与回调函数OnCommRecv()。
串口接收线程为一个无限循环,它不断查询串口接收线程退出事件m_Exit-ThreadEvent。
如果退出事件有效,则该循环结束退出。
如果调用读串口函数查询得知接收到数据,则调用串口接收成功回调函数0nCommRecv()。
4 实验数据及分析设置好串口参数后,打开串口COMl,既可获取实验数据。
图7为在某型军车上一次实测的数据。
实测数据界面拍摄的时间为2009年11月10日晚上9点45分,地点为某训练场。
数据在静止的状态下测得。
该定位显示的数据包括“原始数据”和解析后“经纬度、时间、海拔”等信息。
通过分析图7(a)界面的数据发现,$GPGSV语句有两条,而在“星数”对应的Edit框中显示的定位所用卫星数为8,由于每一条GPGSV最多能显示4颗卫星的信息,故$GPGSV语句为两条。
这说明星数与$GPGSV语句数是吻合的。
而获取有效的GPS定位信息,至少需要4颗定位卫星。
这也说明此次数据是有效的定位数据。
该界面显示的经纬度信息分别为N:38°3.6788’,E:114°29.1765’;其中,N代表北纬,E代表东经。
而用GoolgeEarth软件查阅数据可知,石家庄军械学院南门的精确经度/纬度信息为:北纬38°3.1650’,东经114°29.0046’,军械学院西门的精确经度/纬度信息为:北纬38°3.394O’,东经114°28.5432’。
通过与二者的经纬度信息比对发现,界面实时显示的精度和纬度信息非常精确。
通过实时比对标准的北京时间,说明时间和日期信息显示也完全正确。
速度信息在静止情况下测得,故理想的速度为0 k/s。
而实际测得数据分别为0.060 00 k/s,前文已论述,1 k/s换算成标准的速度信息约0.514 444 m/s,故测得的速度误差分别约为O.030 867 m/s。
可以看出,测量的速度误差相对而言是很小的。
界面显示的海拔信息为:68.800 00 m。
而通过石家庄市规划局提供的资料可知:石家庄市区二环路内地势西北高,海拔高度为81.5 m,东南低,海拔高度为64.3 m。
测得的海拔高度还是存在微小的误差。
这可能跟接收的GPS信号的漂移有关。
从图7(b)部分的卫星视图可以看出,卫星与观测点的方位关系能清晰的表示,而且卫星的编号也能实时显示,从上到下依次分别为:23、17、3、4、19、20、32、11。