新型气动倒绳机的研制与应用
钢丝绳倒绳机讲义
HYDJ-10/8型液压倒绳机HYDJ-10/8 Hydraulic drill line reel使用说明书Operation instruction宝鸡石油机械厂(宝石集团)Baoji petroleum machinery manufacture plant宝鸡通华石油设备制造有限公司Baoji Tonghua petroleum machinery manufacture Ltd总经理General Manager:代军 Dai Jun厂址:陕西省宝鸡市东风路2号Address:2Dongfeng Road, Baoji, Shaanxi,P.R.C电 话Tel :(0917)3462538 3462552邮 编Postcode : 721002一、 钢丝绳倒绳机的用途一、The function of hydraulic drill line reel本机主要是用来完成石油钻机用钢丝绳收、放的一种专用设备。
使用该设备可以实现收、放钢丝绳作业的机械化,提高工作效率、缩短钻井准备时间,减轻操作工人的劳动强度,并保证钢丝绳不扭曲、不打卷,始终处于自然状态,从而防止钢丝绳扭断股和乱绳的发生。
The drill line reel is a type of device used for reel or release drill line and storage drill line. This device can be realized mechanical operation that reel or release drill line ,and promote working efficacy and save time of drilling preparing ,and reduce strength of roughneck working. This device can sure that drill line is not distorted and winding ,and make line is naturally status , thereby protect that drill line is not happen break wires and distort or winding.HYDJ -10/8型液压驱动倒绳机和其它同类倒绳机相比输出扭矩大,运转平衡、无级调速、承载能力大,适用范围广的特点。
DDJ-10电动钢丝绳倒绳机研制与应用

117中国设备工程Engineer ing hina C P l ant中国设备工程 2017.05 (上)随着石油钻机技术的不断发展,快速移运钻机技术的不断进步,适应快速移运钻机的配套设备也不断更新,倒绳机作为石油钻机必不可少的容绳设备,为适应快速移运钻机特性也有了针对性设计。
目前大部分倒绳机采用单独撬装形式,放置于钻机底座下方侧面的配套方案,且倒绳机多采用双滚筒设计,这种倒绳机在常规钻机中广泛应用,但在快速移运钻机中则不适应快速移运要求。
由于快速移运钻机在搬家过程中采用大模块整体移运,多采用井架直立与底座整体移运或井架、底座分体移运。
然而无论采用以上那种移运方式,游吊系统与井架均一体移运,钻井钢丝绳不从游吊系统抽出,而是与井架一体移运,针对这样的移运特性便研制了可随井架或随井架与底座一体移运的倒绳机。
该产品当钻机移运采用井架直立与底座整体移运时固定在底座下侧,当钻机移运采用井架、底座分体移运时,则固定于井架卧倒状态的后侧。
同时由于移运时钻井钢丝绳不从游动系统抽出,重新组装时则不需要穿绳,极大的减少了穿绳的次数,因此该倒绳机不配备引绳滚筒。
1 倒绳机结构与工作原理1.1 结构DDJ-10电动钢丝绳倒绳机如图1所示,主要由底座、支撑轴、齿轮减速装置、减速箱、交流电机、刹车装置、控制箱、护罩等构成。
1.底座2.支撑轴3.齿轮减速装置4.减速箱5.交流电机6.刹车装置7.控制箱8.护罩图1 DDJ-10电动钢丝绳倒绳机结构图底座是所有部件安装的基础,同时底座上设计有与钻机底座或井架连接的耳板,从而便于倒绳机随井架或底座整体移运。
支撑轴是支撑钢丝绳轮的部件,将钢丝绳轮安装于支撑轴后,支撑轴一端安装于底座U 型槽中,另一端安装于大齿轮端部U 型槽中,钢丝绳轮和支撑轴可相对转动。
齿轮减速机构和减速机构成传动链,大齿轮上设置有拨叉机构,将动力输出给钢丝绳轮。
动力源由交流电机提供。
刹车装置固定在底座上,刹车鼓设置在大齿轮侧面。
气动爬绳机器人的研制讲解

目录摘要 (I)ABSTRACT (II)1绪论 (1)1.1机器人发展状况 (1)1.2机器人的应用 (1)1.3课题背景和研究意义 (2)1.4本课题的发展状况 (3)1.5本课题要求完成的工作 (4)2总体设计 (6)2.1爬行器的功能分析 (6)2.2爬行器总体构成设计 (6)2.3系统的工作原理和控制原理 (7)2.3.1系统工作步骤说明 (7)2.3.2系统的气动控制原理 (8)3机械结构设计 (9)3.1机械机构总体布置说明 (9)3.2各部件的设计计算 (9)3.2.1爬行器上下面板的选择和布置 (9)3.2.2连接螺栓的设计计算 (10)3.2.3爬行器的重量计算 (10)4气动系统设计 (12)4.1气动系统的选择计算 (12)4.2气动系统的选择计算 (12)4.3夹紧气缸力学分析 (13)5控制系统部分 (16)5.1控制系统方案说明 (16)5.2 AT89S52单片机 (16)5.3单片机驱动部分 (19)5.4无线数据收发模块功能介绍 (19)5.4.1无线数据收发模块电路图 (19)5.4.2程序流程图 (23)5.5传感器的选择和试验 (24)结论 (25)参考文献 (26)致谢 (27)附录 (28)摘要本文提出了一种以气压驱动的蠕动爬绳机器人的设计方案,该方案以气缸的运动带动机器人夹持机构实现对绳索的夹紧。
然后通过爬升气缸的收缩和伸长来实现机器人的爬升动作。
系统控制部分采用AT89S52单片机为控制核心,为了方便对机器人的控制,通过无线遥控模块对机器人的运动状态进行遥控。
关键词:爬绳;蠕动;机器人ABSTRACTThe paper presents a design scheme of robot which is driven by gas. In this scheme,,the crank structure is driven by the piston clutches the rope.Two crank structure are approached by a latex driver ,which can felx under pressure .When the crank structure and latex driver operate together,robot can squirms up and down .The MCU AT89s52 is used as the core of the control system.In order to control the proposed robot conveniently,Telecom module is applied to operate its kinematic state.Key words: Climbing-rope ; Peristalsis; robot1. 绪论1.1机器人发展状况随着现代工业的蓬勃发展,特别是进入二十世纪以来微电子技术的飞速发展使得机器人技术也有了长足的发展。
气动绞车工作原理
气动绞车工作原理
气动绞车是一种利用压缩空气产生动力的起重设备。
其工作原理如下:
1. 压缩空气供应:通过空压机将空气压缩至一定压力,然后通过管道输送到气动绞车的进气口。
2. 气动马达:气动绞车内部设有一个气动马达,这是绞车的动力来源。
当压缩空气进入气动马达时,气动马达会将气体能量转化为机械能,推动绞车的工作。
3. 齿轮传动:气动马达通过齿轮传动机构将旋转动力传递给绞车的卷筒。
齿轮传动系统通常由一对齿轮组成,其中一个固定在气动马达上,另一个固定在卷筒上。
当气动马达旋转时,齿轮之间的啮合使卷筒随之转动。
4. 卷筒操作:卷筒上通常装有绳索或链条,用于提升货物或物体。
当卷筒旋转时,绳索或链条将被拉动,从而实现货物的升降。
5. 控制系统:气动绞车通常配备有各种控制装置,如手动控制阀、脚踏开关等。
通过控制装置,操作人员可以实现对气动绞车的启停、升降速度调节等操作。
总的来说,气动绞车利用压缩空气产生的动力,通过气动马达和齿轮传动,实现卷筒的旋转和货物的升降。
其优点包括简单、高效、安全,广泛应用于工业领域的起重作业中。
新一代气动救生抛绳器ResQmax
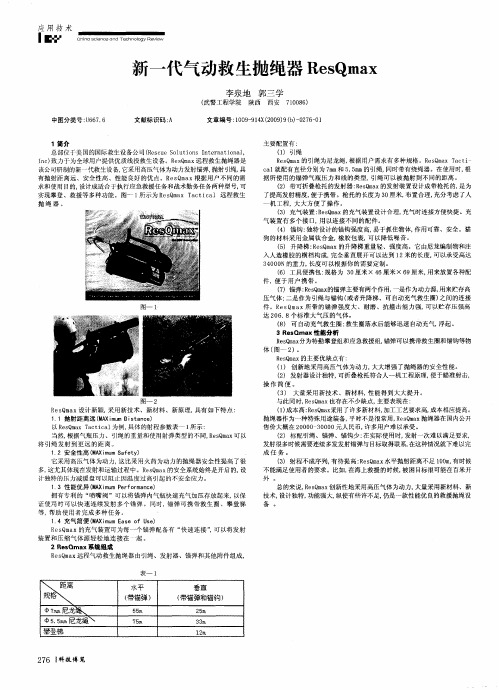
() 创 新地 采用 高压气 体 为动力 , 1 大大 增强 了抛绳 器 的安全 性 能。 () 发射 器设 计独特 , 2 可折 叠枪托 符合人一 机 工程原理 , 便于 瞄准射击 , 操作 简便 。
图一 2
R m x设 计新 颖, 用新 技术 、新材 料 、新 原 理, 有如 下特 点 : eQ a s 采 具 1 1抛 射距 离远 (A i u i t n e M X m m D a c ) s 以 R s m x T c i a 为例, eO a a t c l 具体 的射程 参数表 1 所示 : 当然, 根据 气瓶 压力 、引绳 的重量和 使用射 弹类型 的不 同, e Q a R s m x可 以 将 引 绳发 射 到更 远 的距 离 。 1 安全性 高 (A iu a e y 2 M )m mSf t) ( 它采用 高压气 体 为动力 , 比采 用 火药 为动力 的抛绳 器安全 性提 高 了很 这 多, 这尤其 体现在 发射和运 输过 程中 。R sm x的安全系统 始终 是开启 的, eQ a 设 计 独特 的压力减 缓盘 可 以阻 i因温度 过高 引起 的不安全 应力 。 E 1 3性 能优异 (A u e f r a c ) . M X m m P r o m n e i 拥 有专 利 的 “ 喷嘴 阀 ”可 以将 锚弹 内气瓶 快速 充气加 压存 放起来 , 以保 证 使用 时 可 以快 速连 续发 射 多 个锚 弹 。同 时,锚弹 可携 带 救生 圈 、攀 登梯 等 , 助使 用者 完成 多 种任 务 。 帮
应 用 技 术
I ■
CaiedCOyV h na hl i iccnengew n e T oRe s
新一代气动救 生抛绳器 R s a eQm x
风动倒链设备研发及应用
风动倒链设备研发及应用作者:张海雷来源:《环球市场》2018年第12期一、项目背景随着煤矿不断发展,机械化程度日益提高,安全事故日益减少,但在施工过程中任然出现伤亡事故,如我们现在煤矿使用的手动倒链经常发生齿轮损坏、链条滑链等,手动倒链需要3人配合拉动,起吊重物时劳动强度增大,极易发生安全事故,故我们通过对传统葫芦是倒链进行改造,使用风作为动力源,是企业安全生产,提高效率,降低成本的新一代起重工具,气动倒链的工作原理是将压缩气体的压力能转化为机械能,达到起吊设备的目的,大大减轻了操作职工劳动强度、节约生产时间、保证施工安全及效率。
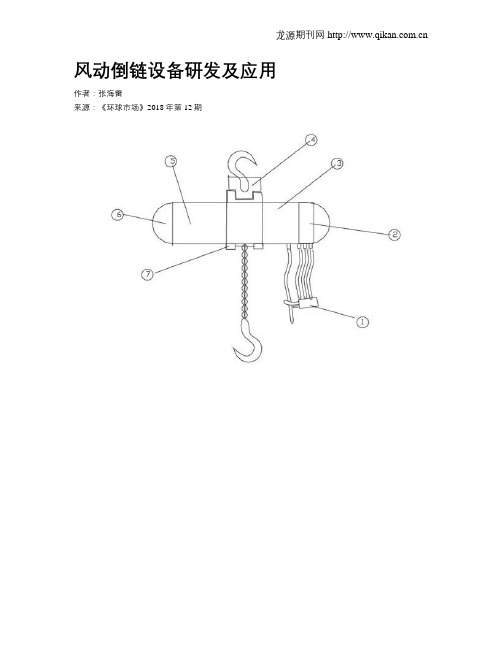
二、气动倒链的结构、工作原理及特点(一)气动倒链的结构、工作原理从能量的转化角度来看,气动倒链是一种将压缩空气的压力能,通过控制气路的作用,经传动机构转化成机械能,输出力矩带动升降机构运行的特殊气动提升机。
它主要由①手空阀(手柄式和手拉绳式)②主控阀③气马达④吊挂⑥减速器⑥刹车结构⑦连锁结构等部件组成。
簧组成。
当上升、下降到位置时起到防撞和保护作用。
(二)气动倒链的特点以0.4-0.6Mpa普通压缩空气为动力源,体积小、重量轻(为相同吨位倒链的1/3-1/8)、防爆、耐酸碱蒸汽、抗高粉尘、可调速、高效的气动起重设备。
广泛应用于石油、煤矿、化工纤维、医药制造、机械生产等领域。
三、安全操作规范(一)安全操作规范是在帮助工作人员了解需避免的危险操作,参阅本手册了解其安全信息。
(二)严禁提升大于产品提升能力的负荷。
(三)起吊重物时严禁站在起吊物下方。
(四)严禁将载重链当吊链使用。
(五)如果吊链出现扭曲、扭结或损坏,禁止使用该气动倒链。
(六)不允许带负荷过长时间悬挂起吊物。
(七)不允许将载重链作为焊接接地,不允许在气动倒链或吊链上焊接。
(八)不允许对该气动倒链使用上卞止动装置进行制动。
(九)不允许侧拉或侧拖。
(十)禁止在吊链之间插入螺栓或通过其他方法连接。
(十一)每班作业之前检查气动倒链的磨损或损坏情况以及制动或限位装置。
一种高效倒绳机机构[实用新型专利]
![一种高效倒绳机机构[实用新型专利]](https://img.taocdn.com/s3/m/25c4428f9b6648d7c1c746fa.png)
专利名称:一种高效倒绳机机构
专利类型:实用新型专利
发明人:刘宝民,刘晓锋,郭全恒,鲍永强,陈刚,徐高亮,陶佳阳申请号:CN202021129394.8
申请日:20200617
公开号:CN212608716U
公开日:
20210226
专利内容由知识产权出版社提供
摘要:本实用新型涉及倒绳机技术领域,其公开了一种高效倒绳机机构,解决了目前线绳卡死时驱动电机的持续转动可造成破坏的技术问题,包括基座、安装板、驱动电机、转轴和倒绳筒,转轴转动安装在安装板上,驱动电机和转轴驱动连接,倒绳筒同轴固定在转轴上,驱动电机和转轴之间设有传动机构,传动机构包括超扭力打滑组件和齿轮组件;超扭力打滑组件包括壳体以及同轴设置的主动盘和从动盘,主动盘设有内齿,从动盘设有外齿;外齿在超过其承受的扭力作用下隔断主动盘和从动盘之间的传动力。
根据以上技术方案,设置超扭力打滑组件,当卡死时,需要的扭力增大,此时超扭力打滑机构出现打滑,以让驱动电机不再带动转轴转动。
申请人:上海康冀海洋工程有限公司
地址:202155 上海市崇明区长兴镇潘园公路1800号3号楼54659室(上海泰和经济发展区)国籍:CN
代理机构:南昌金轩知识产权代理有限公司
代理人:党冲
更多信息请下载全文后查看。
气动可调角度排绳装置[实用新型专利]
![气动可调角度排绳装置[实用新型专利]](https://img.taocdn.com/s3/m/1f5c9e6f8762caaedc33d4b8.png)
专利名称:气动可调角度排绳装置
专利类型:实用新型专利
发明人:毛南翔,许贵庭,郭智慧,毛湘武申请号:CN201320447616.4
申请日:20130726
公开号:CN203359670U
公开日:
20131225
专利内容由知识产权出版社提供
摘要:本实用新型为一种气动可调角度排绳装置,解决了矿井先用的调度绞车不能自动排绳的缺陷。
该装置包括固定机架、小车、排绳架和气缸;固定机架包括底座及固定在底座上的槽钢轨道;小车包括底部设有滑轮的车板,滑轮滑动卡置在两根槽钢轨道的槽口内;排绳架包括底板,底板上设有两个滚筒,底板上一对对角的位置分别螺纹连接有一根调节螺杆;小车与排绳架通过连接耳铰接;气缸的缸体和活塞杆分别固定在固定机架和小车上。
该装置中的排绳架可调整角度和左右位置,能使调度绞车上的牵引钢丝绳牵引角度始终与排绳轮装置角度相吻合该装置结构简单,制造方便,操作灵活,适应性强,井下安装操作方便,可用在矿山各种调度绞车运输系统。
申请人:毛湘武
地址:045008 山西省阳泉市矿区恒康家园
国籍:CN
代理机构:太原科卫专利事务所(普通合伙)
代理人:朱源
更多信息请下载全文后查看。
气动抛绳器建模仿真与试验研究
气动抛绳器建模仿真与试验研究王志文 熊 伟 王海涛 王祖温大连海事大学,大连,116026摘要:简要介绍了气动控制击发型气动抛绳器的结构与工作原理,应用AM E S i m 建模仿真软件对气动抛绳器系统进行了建模仿真,得到了气动抛绳器主要组件的动态响应特性㊂将弹体抛射初速度的仿真值与抛射试验测量值进行对比分析,结果基本一致,验证了模型的可靠性㊂研究结果为气动抛绳器的进一步优化设计提供了参考㊂关键词:气动抛绳器;建模仿真;动态响应;海上救助中图分类号:T H 138 D O I :10.3969/j.i s s n .1004132X.2015.11.003M o d e l i n g ,S i m u l a t i o na n dE x pe r i m e n t of aP n e u m a t i cL i n e ‐t h r o w e r W a ng Zhi w e n X i o n g W e i W a n g H a i t a o W a n g Zu w e n D a l i a n M a r i t i m eU n i v e r s i t y,D a l i a n ,116026A b s t r a c t :T h e s t r u c t u r e a n d t h ew o r k i n gp r i n c i pl e s o f a l i n e ‐t h r o w e rw e r e i n t r o d u c e d ,w h i c hw a s c o n t r o l l e db yp n e u m a t i cv a l v eh e r e i n .A m o d e l o f t h e l i n e ‐t h r o w e rw a sd e v e l o p e d i n AM E S i ms o f t -w a r e .T h ed y n a m i cb e h a v i o r so fm a i nc o m p o n e n t sw e r eo b t a i n e db y si m u l a t i o n .T h er e s u l t so f t h e s i m u l a t i o na n d t h e e x p e r i m e n t s a r e c o n s i s t e n tw i t h e a c ho t h e r a n d t e s t i f y t h e r e l i a b i l i t y of t h em o d e l ,t h u s p r o v i d i ng r e f e r e n c e f o r f u r th e r o pt i m i z a t i o no f a l i n e ‐t h r o w e r .K e y wo r d s :p n e u m a t i c l i n e ‐t h r o w e r ;m o d e l i n g a n d s i m u l a t i o n ;d y n a m i c r e s p o n s e ;m a r i n e r e s c u e 收稿日期:20140804基金项目:国家科技支撑计划资助项目(2014B A K 05B 06);中央高校基本科研业务费专项资金资助项目(3132014303);交通运输部建设科技重点项目(2013328225080)0 引言抛绳器又名撇缆枪㊁抛绳枪㊁抛投器等,是一种远距离抛射绳索的器具,被广泛应用于海上救援㊁舰船补给㊁消防救援㊁水文勘测等领域[1]㊂利用抛绳器为遇险船舶引缆是当今海上救助主流的引缆方式,抛绳器性能的优劣直接影响救助成功与否㊂传统气动抛绳器大都采用机械直动式换向阀,需通过操作人员扣动扳机的方式实现阀的气路切换㊂操作人员扣动扳机的时间相对较长,且操作时间不稳定,这导致阀体响应速度较慢且抛射稳定性相对较差㊂为提高阀体响应速度和抛射稳定性,本文对气动抛绳器进行了改进,将手动扳机击发改进为气动控制击发㊂为了减少改进设计中的不确定性,缩短研发周期,提高工作效率,降低设备加工成本,并更好地了解装置的动态性能,对设计方案进行正确的建模仿真是一种行之有效的方法[2]㊂AM E S i m 是一款基于键合图理论的系统建模仿真软件,可以实现机电液气等一体化的综合物理系统建模仿真,而且模型库中不同物理领域的模型单元都经过了严格的测试和实验验证[3]㊂本文应用仿真软件AM E S i m 对气动抛绳器进行建模仿真,通过弹体抛射速度的仿真结果与抛射试验测量结果的比较检验模型的正确性,为装备的后续研发提供可靠的基础仿真模型㊂1 抛绳器结构与工作原理气动抛绳器是将高压气体存储的内能转化为弹头飞行的动能的一种装置[4]㊂本文在文献[4]所述气动抛绳器的基础上进行了部分改进,主要是将机械式手动击发改进为高压气体控制击发,气动抛绳器三维结构如图1所示,其本体主要组件结构如图2所示,腔内活塞2将工作腔B 和控制腔A 分隔开,工作腔提供抛射时的工作气体(击发时工作气体释放,推动发射管内弹体加速前进),控制腔内高压气体作用在腔内活塞底部,与弹簧一同控制工作腔的开启和关闭㊂进行击发时,打开保险7,供给控制气体,控制气体经控制气体进口c 进入到控制活塞5上部,推动活塞5向下运动,活塞推动推杆4和阀芯8向下运动,随着阀芯的向下运动,阀芯8与阀座之间的排气通道打开,控制腔A 中的高压气体依次经过控制腔气路通道a ㊁排气通道和大气通孔d 排放至大气㊂放气过程中,控制腔A 中的气体压力迅速降低,腔内活塞2上的力平衡被破坏,活塞向控制腔侧运动(图2中所示为向右运动)㊂此时,腔内活塞2前端的橡胶密封块和腔筒3之间形成的密封被㊃4341㊃Copyright ©博看网. All Rights Reserved.破坏,工作腔B 中的高压气体迅速充入到发射管中,推动弹体1加速,当弹体离开发射管时达到最大速度,完成抛射㊂阀体部分具体的结构特点和工作过程可参考文献[4]㊂图1气动抛绳器结构示意图1.弹体 2.腔内活塞 3.腔筒 4.推杆 5.控制活塞 6.进气接头 7.保险 8.阀芯 9.安全阀 a -控制腔气路通道 b -工作腔气路通道 c -控制气体进口 s -工作气体进口 d -大气通孔 A-控制腔 B-工作腔 C-控制气体 S -工作气体图2 抛绳器本体主要组件结构图图3是抛绳器系统的原理图,系统由发射管㊁主腔体㊁阀体和气源气路四部分组成,储气瓶内的高压气体经过截止阀㊁减压阀,然后分别经过供气电磁阀和击发电磁阀供给抛绳器工作气体和击发控制气体㊂Ⅰ-发射管 Ⅱ-主腔体 Ⅲ-阀体 Ⅳ-气源气路D -击发电磁阀E -进气电磁阀 J -减压阀 K-截止阀Q P -储气瓶图3 抛绳器系统原理图2 气动抛绳器建模仿真分析2.1 系统建模仿真在AM E S i m 软件中建立气动抛绳器系统仿真模型,如图4所示,根据实际系统参数设置仿真参数㊂图4 抛绳器系统模型在本模型中,由于阀体响应很快,为了在保证仿真精度的前提下加快仿真速度,故采用变间隔采样,在系统参数动态变化的时间段内采用较小的采样周期,在系统参数稳定时采用大采样周期㊂抛绳器阀体模型是整个系统中最为关键的部分,其中摩擦模型的选取对阀体性能有很大影响㊂在抛绳器设计初期,由于系统模型没有考虑O 形密封圈的摩擦,导致最初设计的控制活塞有效受力面积过小㊂加工完成样机后进行击发试验发现,当工作压力低于5M P a 时,抛绳器未能按预期设计正常工作㊂分析发现,滑阀及活塞O 形密封圈的摩擦力是不容忽略的,经在设计模型中考虑摩擦力模型,加大控制活塞受力面积后,抛绳器完成了预期设计要求㊂本模型中O 形密封圈摩擦模型采用P a r k e r 密封圈摩擦模型[5]㊂为了仿真弹体抛射初速度(弹体离开发射管瞬间的速度),采用位移传感器实时监测弹体位移,当弹体位移达到发射管长度时,将发射管内气体通向大气,即弹体离开发射管后不再受高压气体的推动作用㊂为了简化系统模型,在仿真模型中不设置减压阀,而直接采用恒压气源来仿真高压气体经过减压阀后的压力㊂0s 时进气电磁阀开启进行充气,充气控制信号控制进气电磁阀在1s 时关闭,然后击发电磁阀在2s 时控制击发电磁阀开启,进行击发㊂分别将气源压力设为7M P a ㊁6M P a ㊁5M P a 和4M P a 运行模型进行仿真,得到了系统各部分的动态响应特性㊂2.2 仿真结果分析下面通过分析控制腔和工作腔内气体压力变化以及弹体在发射管内速度变化来说明抛绳器的工作过程,解释试验现象㊂图5所示为6M P a 气源压力下控制腔和工作腔内气体压力随工作过程的变化㊂充气过程㊃5341㊃Copyright ©博看网. All Rights Reserved.中,控制腔内气体压力一直高于工作腔内气体压力,直至两气腔压力几乎同时达到气源压力,这是因为工作腔容积比控制腔容积大得多,使得在充气过程中进入工作腔的气体升压相对缓慢,此压力差的存在也保证了在充气过程中腔内活塞能够确保工作腔的密封㊂在进行击发时,工作腔内的气体压力下降滞后于控制腔内气体压力下降,控制腔内气体压力的迅速下降使腔内活塞能够快速响应从而开启工作腔,工作腔内高压气体迅速释放,推动弹体在发射管内加速㊂图5 气源压力为6M P a 时控制腔和工作腔内气体压力变化图6㊁图7所示分别为控制腔和工作腔在4种不同气源压力下腔内气体压力变化曲线㊂在充气过程中,气源压力越高,腔内压力上升越快,但是不同气源压力下充气完成的时间基本相同㊂在击发过程中,气源压力越高,腔内气体压力下降越快,工作腔内高压气体能够迅速释放完毕,这是因为在较高压力下击发时,腔内活塞两侧形成的气体压差相对较大,从而腔内活塞响应更快,将工作腔打开释放高压工作气体㊂图6不同气源压力下控制腔内气体压力变化图7 不同气源压力下工作腔内气体压力变化图8所示为不同工作压力下弹体在发射管内的速度变化曲线,可以得出,工作压力越高,弹体离开发射管时的抛射初速度(图8曲线的峰值)越大;弹体在发射管内加速度越大(表现为图8中速度上升曲线的斜率越大),加速时间越短㊂图9所示为不同工作压力下弹体在发射管内所受合力的变化曲线,可以看出,当腔内活塞打开后,高压气体迅速充入发射管,导致弹体合力迅速上升至最大值㊂之后弹体在发射管内加速前进,发射管内气体容积增大,气体压力下降,同时随着弹体速度的迅速增加,发射管内壁作用在弹体上的摩擦阻力也迅速增大,最终导致弹体合力逐渐减小㊂值得注意的是,压力越大弹体开始加速的时间越接近于击发时间(2s ),即压力越大弹体响应越快,从根本上分析,阀体的响应特性起到了关键作用㊂如图10所示,工作压力越高,阀体响应速度越快,阀芯到达行程终点的时间越短,从而使控制腔中气体能够快速释放,进而腔内活塞能够更快速地响应㊂因此可以得出,气动抛绳器阀体响应速度的快慢与稳定性对抛绳器抛射性能有很大影响㊂图8不同压力下弹体在发射管内速度变化图9不同压力下弹体所受合力变化图10 不同压力下阀芯位移变化㊃6341㊃Copyright ©博看网. All Rights Reserved.3抛射试验研究由于阀体集成在抛绳器内部,现阶段难以直接对阀体的动态响应特性进行测量㊂而弹体的抛射距离和抛射初速度是比较容易测得的,为了检验基于AM E S i m 所建模型是否准确可靠,进行实地抛射试验,以测量不同压力下弹体的抛射初速度,抛射试验装置如图11所示㊂将仿真值与测量值进行比较,对比结果如图12所示㊂试验过程中利用雷达测速仪测量弹体在离开发射管瞬间的抛射初速度㊂分别测量在2~10M P a 工作压力下弹体抛射初速度,多次测量取平均值,得到不同工作压力下的弹体抛射初速度㊂图11抛射试验装置图12 抛射初速度仿真值与试验值对比从图12可看出,仿真值与试验测量值整体上变化趋势一致,在5~10M P a 压力范围内误差比较小,在2~5M P a 压力范围内仿真值与试验值存在较大误差,工作压力越低,误差越大㊂除了传感器精度和人为因素导致的测量误差外,误差产生主要是因为仿真是在一定的假设条件下进行的,仿真模型与实际系统存在偏差,如仿真过程中选择的摩擦模型与实际摩擦情况存在偏差,实际气腔的变质量变容积热力学过程在仿真模型中处理还不完善[6],传热模型也没有充分精确的考虑㊂而且,在抛射试验时发现,当气体压力较大时,气体惯性对系统动态特性也有一定的影响,在本模型中并没有给予考虑㊂4 结束语本文应用AM E S i m 建模仿真软件对气动控制击发的气动抛绳器系统进行了建模仿真,仿真结果与试验现象一致,弹体抛射初速度的仿真值与试验测量值较为吻合,验证了模型的可靠性㊂在低工作压力时存在一定误差,主要是由模型的理想化造成的㊂后续工作将以本仿真模型为基础,对摩擦模型㊁传热模型以及管路模型进行进一步深入优化分析,尤其是对阀体部分的精确建模与实验分析㊂参考文献:[1] 刘浪波.新型抛绳器设计及试验研究[D ].大连:大连海事大学,2013.[2] 李宝仁,杨钢,杜经民.高压随动压力控制阀动态性能的仿真研究[J ].华中理工大学学报,1998,26(7):24‐26.L i B a o r e n ,Y a n g G a n g ,D u J i n g m i n .D y n a m i c S i m -u l a t i o n I n v e s t i g a t i o n o fH i ghP r e s s u r e S e r v oC o n t r o l V a l v e [J ].J .H u a z h o n g Un i v .o fS c i .&T e c h .,1998,26(7):24‐26.[3] 付永领,祁晓野.AM E S i m 系统建模和仿真从入门到精通[M ].北京:北京航空航天大学出版社,2006.[4] 王海涛,刘浪波,熊伟.气动抛绳器的改进设计[J ].液压与气动,2013(4):110‐112.W a n g H a i t a o ,L i uL a n g b o ,X i o n g W e i .I m pr o v e d D e s i g no f P n e u m a t i cL i n e ‐t h r o w e r [J ].C h i n e s eH y -d r a u l i c s&P ne u m a t i c s ,2013(4):110‐112.[5] P a r k e rH a n n i f i nC o r p o r a t i o n .P a r k e rO ‐r i n g H a n d -b o o k [M ].L e x i n g t o n :P a r k e r H a n n i f i n C o r p o r a -t i o n ,2007.[6] L M SI m a g i n e .L a b AM E S i m P n e u m a t i c L i b r a r yR e v 12U s e r ’sG u i d e [M ].R o a n n e :L M SI m a gi n e S .A.,2013.(编辑 袁兴玲)作者简介:王志文,男,1989年生㊂大连海事大学船舶机电装备研究所博士研究生㊂主要研究方向为气压传动与控制㊂熊 伟,男,1972年生㊂大连海事大学船舶机电装备研究所教授㊁博士研究生导师㊂王海涛,男,1973年生㊂大连海事大学船舶机电装备研究所教授㊁博士研究生导师㊂王祖温,男,1955年生㊂大连海事大学船舶机电装备研究所教授㊁博士研究生导师㊂㊃7341㊃Copyright ©博看网. All Rights Reserved.。
船用抛绳器工作原理
船用抛绳器工作原理
船用抛绳器的应用范围很广泛,比如气动抛绳器主要应用于救援中心、海关缉私、边防警察消防救援、海上钻井平台及工作船补给船、备用船、油轮、邮轮和渡轮。
今天要来给大家介绍下船用抛绳器工作原理。
我们以气动抛绳器为例,来给大家介绍下气动抛绳器的工作原理。
气动抛绳器是依靠高压气体驱动的线性抛绳器系统,不使用爆炸物、无火花或火焰,简单的工作原理和过程为:首先,从外部气体压缩器输入高压空气至抛绳器的气缸中;而后拉动扳机时依靠高压气体产生的强大压力,对位于抛绳器前端的抛射头产生巨大的推动作用,使抛射头在枪膛中速度达到最大,从而实现抛射头瞬间离开抛射体被远距离发射出去,发射至目标处的空中飞行时间仅为4秒左右。
一公斤重物,在倾角45度抛射距离大于60米。
抛射头内部可配备绳索或是外接绳盒装备,两端分别连接于抛射头和抛绳器上。
实现发射紧急困难条件下远距离迅速抛射锚泊缆索、粗大缆索的抛掷、或收回引导缆索。
另外可选一些重要配件来配备相应的型号,例如绳端可连一个自动的救生圈,绳索被抛射出去后,救生圈遇水能被自动打开,满足海上作业和紧急救险营救行动的需要。
当落水者需要救助时,将抛投发射器对着前方目标,转动握柄使击针刺穿气瓶,同时气体将释放至抛投器的气室内。
然后扣动发射扳机,抛投发射器可直接将救生圈抛射到被救目标旁边。
气胀式救生圈一旦接触到水,自动充气装置就会在5秒内充气,使气瓶内的气体充满气室,由于气体的压力,使气室等组件与外壳分离并自动充气成型,被救目标将会借助自动充气成型的救生圈保持体位浮在水面上,起到救生的作用。
新型电动钻机倒绳机研制与应用
新型电动钻机倒绳机研制与应用
新型电动钻机倒绳机是一种用于矿山、建筑等领域的机械设备,它能够自动完成倒绳和钻孔作业。
该设备的研制与应用,对于提高工作效率、降低劳动强度、保障工作安全等方面都具有重要意义。
新型电动钻机倒绳机的研发可以大大提高工作效率。
传统的倒绳和钻孔作业需要人工操作,不仅效率低下,而且容易出现误差。
而新型电动钻机倒绳机则可以实现自动化操作,不仅速度快,而且精度高,能够大大提高工作效率。
新型电动钻机倒绳机的使用可以降低劳动强度。
传统的倒绳和钻孔作业需要工人长时间站立或弯腰操作,容易导致身体疲劳和受伤。
而新型电动钻机倒绳机则可以让工人坐在设备旁边进行监控和操作,大大降低了劳动强度。
新型电动钻机倒绳机的应用可以保障工作安全。
传统的倒绳和钻孔作业存在一定的安全隐患,如操作不当可能导致机器损坏或者人员受伤等问题。
而新型电动钻机倒绳机采用了先进的技术和安全措施,能够有效避免这些问题的发生,保障了工作人员的安全。
需要注意的是,新型电动钻机倒绳机虽然具有很多优点,但在使用过程中也需要注意一些问题。
例如,需要定期对设备进行维护和保养,以确
保其正常运行;同时还需要对操作人员进行培训和管理,确保他们能够正确使用设备并遵守相关安全规定。
新型电动钻机倒绳机的研制与应用对于提高工作效率、降低劳动强度、保障工作安全等方面都具有重要意义。
在未来的发展中,我们应该进一步推广和完善这种设备,为各行各业提供更加高效、安全、可靠的服务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[ 3 ] 畅峻峰. 机床及夹 l M] 一£ 京: 清华大学 出版社 , 2 0 0 5 . 1 4 ] 张春敏 . 刘立 国. 车工工艺学[ M] . 北京 : 电子工业出版社 , 2 0 0 6 . 1 5 J 陈旭东. 机床夹具设 汁[ M] 一E 京: 清华大学出版社 , 2 0 l 0 . [ 6 ] 聂建武. 金属 切削 机床[ M] . 西安 : 西 安电子科技大学 出版社 , 作者 简介 : 陈秀珍 ( 1 9 6 9 一) , 女, 高级 工程 师 , 主要研 究方 向模具 制
造、 数控技 术、 机械制造 工艺。
收 稿 日期 : 2 0 1 5 - 0 4 — 1 9 2 0 0 6 ( 编辑 立 明)
目前钻 修 机 普 遍 配置 的倒绳 机 结 构形 式 为 电动 带
机 械工程师 2 0 1 5 年第9 期i 2 3 5
鼹 决方 案
躲藏 工艺 / Tm / 耀
新 型气 动倒 绳 机 结构 如 图 2 所 示 ,主要 内 钢丝 绳 滚
筒、 滚筒支架 、 支座总成 、 动力源 、 气控 系统 、 传 动装 置 等 传动, 其 结构 较 复 杂 , 体积大, 占用 空 间大 , 尤其 在 空 间位 部 件 组 成 。本设 备 可 改 变滚 筒 的规 格 及 容绳 量 来适 应 不 置 受 限 的海 洋设 备 l ,使用 体 积 小 占地 面积 小 的设 备 就 同型 号及 长 度 的钢 丝绳 收 、 放作业。
解. 央方案
工艺 / 工装 , 礞具 , 诠髓 , 颤潮 , 维修 , 蕊造 躲霹憋 磊 蟊 墓 毅
新型气动 倒绳机的 研制与 应用
怡 强 , 马 进 生 , 苏 疆 , 彭 广 源 , 冯 克 , 郭 昂 , 杨 正 伟
( 南阳二机石油装备( 集团) 有 限公 司 , 河南 南 阳 4 7 3 0 0 6)
后 的 钢丝 绳 重新 收 盘 , 以便 于 钢丝 绳 以后 再 次使 用 , 也 有 利 于 钢丝 绳 的搬 迁运输 ÷同时还 可 防止 钢丝 绳 打卷 、 扭 曲 变形 , 起 到保 护钢 丝 绳 、 延长 钢 丝绳 使 用寿 命 的 作用 。对
钢丝绳 的收 、 放作 业 实现 机 械 化 , 大 大减 轻 了工作 人 员 的 劳动 强度 , 提 高 了 工作 效率 。该设 备 适用 于 钢丝 绳 的 收 、
上 与 达 作 为 没 备的动 力源 。 1 技 术 分析
鉴于 以上分析结果 , 针对该设备存在 的缺陷 , 本着结
构简单 、 操 作 方便 、 降 低 能耗 、 节 省成 本 、 安全 可 靠 的原 则
2 设计 方 案
自动化 程 度 不断 提 高 ,气 动元 件作 为控制 系统 的执 行 元 进 行新 型 气 动倒 绳机 的方 案设 计 。
在钻机 的安装和拆卸过程中 ,都要求对钻井用钢丝
绳 进 行收 放 作业 , 为_ 『 能 够调 整 速 度 , 适 应 特殊 情 况 的作
业. 研 制 钢丝绳 倒 绳 机 。钢 丝 绳倒 绳机 是 对钻 井用 钢
丝绳进彳 t 收、 放作业的专用设 备。 利用该设备可以将使用 k 鼬 该 倒 绳机 采 用 电 机 为动 力 源 , 通过 皮 带 传 动 , 带 动减
放作 业 , 以 及大 型 电缆 、 电线 的 收 、 放 作业 , 也 可用 于类 似 要求 的其 他绳 索 的收 放 。 F { 前 常 见的钢 丝绳 倒 绳 机按 传 动形 式 分 为 :齿 轮传 动 倒绳 机 , 带、 链 传 动 倒 绳 机 。按 动 力源 分 为 : 电 动倒 绳 机, 液 压 倒绳 机 , 气 动倒 绳机 。 相 对 于气 动马 达而 青 , 电机 仃 体积 较 大 、 l 牦能源 、 寿 命短 等 缺 陷 。而采 用 液压 为动 力 源, 必 须 配 箭相 应 的液 站 、 机 械油 , 其结 构 复 杂 , 且 产 生 机 械油 的损 牦 。 采用 气动 马 达作 为倒 绳机 的 动力 源 , 只 需 要接 入 0 . 6 2 M P a 气源就 可1 - 作, 防爆 、 抗污染 、 结 构 简
、
价 格便 宜 、 安装 维护 方便 、 环保 、 寿命 长 。 传 动 形式 在
链传 动 的基 础上 加 以改 进 ,结 构 更加 简单 紧凑 ,传 动 平 稳, 机 械{ f = 『 i 耗小 , 制 造成 本低 。 随 着 中国工 业 的迅 速发 展 , 件, 受 到 r人们 的关 注 , 越 来越 多 的客 户 选择 使 用 气 动
0 引 言
显得尤为重要 了, 现对电动带传动倒绳机进行技术分析。
如图 1 所 示 为 电动 带 传 动 倒 绳 机 ,主要 南 支架 、 电 机、 减速机 、 联轴 器 、 支座 、 旋转臂 、 中心 轴 等部 件组 成 。 其 外 形尺寸 为 : 长3 2 0 0 n l n ] x 宽1 5 0 0 x 高2 0 0 0 m m, 总重 1 5 1 6 速 机转 动 , 再通 过 联 轴器 驱 动滚 筒转 动 。 该 设备 接 入 3 8 0 V电源 使用 , 能耗 高 。
表 2 倒绳 机 尺 寸 及 质量 对 比
控制进气阀或排气阀的开度 , 即控制压缩空气的流量 。 就 能调节马达的输出功率 和转速。 b . 能够正转也能反转。 大
多数 气 动马 达 只要 简单 地 用操 纵 阀来 改变 马 达进 、 排 气 方向, 即可实 现 气动 马达 输 出轴 的正 转 和 反转 , 并且 可 以 瞬 时换 向。在 正反 向转 换 时 , 冲击很 小 , 在 很 短 的时 间 内 即可升 到 全 速 , 实 现 正 反转 的 时 间短 , 速 度快 。c . 工 作 安 采用 气 动马 达 为 动 力 源 , 安 全 环保 , 符合 H S E管 理 全 , 不 受振 动 、 高温 、 电磁 、 辐射等影响 , 适 用 于恶 劣 的