机器人避障超声波测距系统(硬件)
用于移动机器人避障的超声测距系统

式 1构 成 1 定 时 器 。 回波 中 断 由外 部 中断 1 , 6位 触发 , 中断程序 很简 单 , 方 面使 定 时 器 停 止 一
计时, 一方 面置 回波 标志 。
图 3 回波接 收电路 1 3 计 测 时 间 .
采集 处理模 块 和 串行 通讯 模块 。下 位机 数据 采集
超声波从发 送 到接收 的 时 间间隔 的测 定 是 由 单片机 内部 的计数器 来 完成 的 。由于超声 波 发
处理 程序 和 串行 发 送 程 序 用 MC S一5 1汇编 语 言 编写 , 上位 机接 收程 序用 c语 言 编写 。
统 中使用 , 测距范 围 0 2~ m, . 5 精度 ± c 4 m。 关键词 :超声测距 移动机器人 避障 单 片机 串行通讯
Ab t a t n ti a e ,a l a o i a g n y tm sd sg e o b l o o o a o d o sa l . h o t s r c :I h sp p r n u t s nc r n i g s se i e in d f ra mo i r b tt v i b tc e T e s f r e — w r n a d a e d sg f h y tm a e n sn l h p mirc mp trc n r l l ic s e n d ti,a d t e a e a d h r w r e i o e s se b d o ig e c i c o o u e o to a e d s u s d i ea l n h n t s sr cu e a d p n i l ft e s se a e a s r s ne h c e a e n a p id t h b tc e a od n e o t tr r c pe o y tm r lo p e e td T e s h me h b e p l o te o sa l v ia c fa u n i h s e mo i o o n i d o n i n n. h e u t s o h t ti w l a l o s t f h e n d, n e r n e o a — b l r b t o re vr me t T e rs l h w t a s e l b e t ai y t e d ma e i n o s i s a d t a g f h me s u e i f m 2 e t tr o 5 me e .t e p e iin i ± e t tr . r s r 0 c n i e s t tr h r cso s 4 c ni e o me s me s
超声波测距仪的设计方案

软件算法优化
实验结果有效
采用时间戳和温度补偿的方法,提高了超 声波测距的精度和稳定性。
经过实验验证,该超声波测距仪的测量误 差在3mm以内,满足设计要求。
研究不足与展望
实验环境限制 硬件性能提升 软件算法优化 应用领域扩展
本次实验主要在室内环境下进行,对于室外复杂环境下的测量 精度和稳定性还需要进一步验证。
[2] 王晓华, 钱燕. 基于单片机的超声波测距 仪设计[J]. 仪表技术与传感器, 2020,(04): 56-60.
[3] 张志超, 王琳. 嵌入式超声波测距 仪的设计与实现[J]. 仪表技术与传感 器, 2021,(01): 78-82.
THANKS 感谢观看
可以考虑采用更高性能的单片机和传感器,以提高超声波测距 的精度和响应速度。
可以进一步优化软件算法,例如加入目标识别和跟踪功能,提 高超声波测距的应用范围。
超声波测距技术在机器人避障、自动驾驶、安防等领域都有广 泛的应用前景,可以进一步拓展应用领域。
07 参考文献
参考文献
[1] 张涛, 王超. 超声波测距仪的设计与 实现[J]. 电子测量技术, 2019, 42(11): 105-109.
计算距离
通过测量超声波从发射到 接收的时间,计算出距离 。时间乘以声速得到距离 。
数据处理及存储
数据处理
对采集到的数据进行处理,如滤波、去噪等,以提高测量精度。
数据存储
将处理后的数据存储到存储器中,方便后续分析和处理。
人机交互界面设计
显示测量结果
通过液晶显示屏或LED显示屏显 示测量结果。
按键输入
研究超声波测距仪的设计方案 有助于提高测量精度和可靠性 ,推动相关领域的发展。
超声波测距在机器人避障中的应用毕业论文

超声波测距在机器人避障中的应用毕业论文目录绪论 (1)1课题设计目的及意义 (1)1.1设计的目的 (1)1.2设计的意义 (1)2超声波测距仪的设计思路 (1)2.1超声波测距原理 (1)3课题设计的任务和要求 (2)第一章超声波测距系统硬件设计 (2)1 系统设计 (2)2 51系列单片机的功能特点 (3)3系统硬件结构的设计 (3)3.1 单片机显示电路原理 (4)3.2 超声波发射电路 (4)3.3 超声波检测接收电路 (4)3.4超声波测距系统的总电路 (5)第二章超声波测距系统的软件设计 (5)1 超声波测距仪的算法设计 (5)2主程序流程图 (6)3超声波发生子程序和超声波接收中断程序 (7)4 系统的软硬件的调试 (7)第三章超声波测距系统在智能机器人中的应用 (7)1 避障系统设计思想 (8)2 硬件设计 (8)3 软件设计 (9)总结 (12)致谢 (13)参考文献 (14)附录 (15)绪论1课题设计目的及意义1.1设计的目的随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
智能教学机器人避障系统的
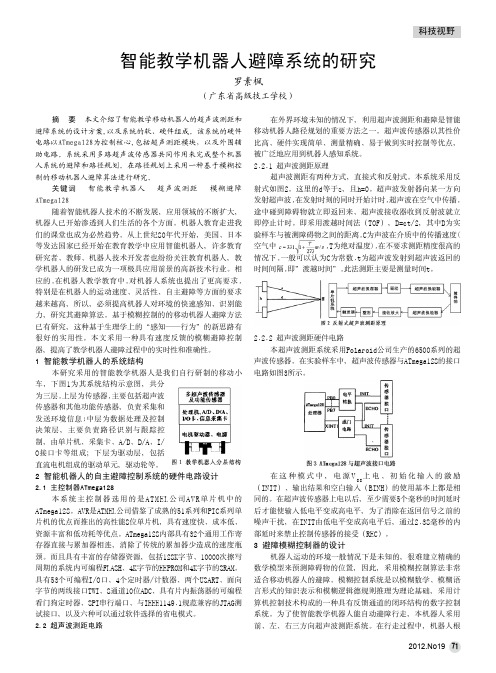
2012.No19 1摘 要 本文介绍了智能教学移动机器人的超声波测距和避障系统的设计方案,以及系统的软、硬件组成。
该系统的硬件电路以ATmega128为控制核心,包括超声测距模块,以及外围辅助电路。
系统采用多路超声波传感器共同作用来完成整个机器人系统的避障和路径规划。
在路径规划上采用一种基于模糊控制的移动机器人避障算法进行研究。
关键词 智能教学机器人 超声波测距 模糊避障 ATmega128随着智能机器人技术的不断发展,应用领域的不断扩大,机器人已开始渗透到人们生活的各个方面。
机器人教育走进我们的课堂也成为必然趋势。
从上世纪80年代开始,美国、日本等发达国家已经开始在教育教学中应用智能机器人,许多教育研究者、教师、机器人技术开发者也纷纷关注教育机器人,教学机器人的研发已成为一项极具应用前景的高新技术行业。
相应的,在机器人教学教育中,对机器人系统也提出了更高要求,特别是在机器人的运动速度、灵活性、自主避障等方面的要求越来越高,所以,必须提高机器人对环境的快速感知、识别能力,研究其避障算法。
基于模糊控制的的移动机器人避障方法已有研究,这种基于生理学上的“感知——行为”的新思路有很好的实用性。
本文采用一种具有速度反馈的模糊避障控制器,提高了教学机器人避障过程中的实时性和准确性。
1 智能教学机器人的系统结构本研究采用的智能教学机器人是我们自行研制的移动小车,下图1为其系统结构示意图,共分为三层,上层为传感器,主要包括超声波传感器和其他功能传感器,负责采集和发送环境信息;中层为数据处理及控制决策层,主要负责路径识别与跟踪控制,由单片机、采集卡、A/D、D/A、I/O接口卡等组成;下层为驱动层,包括直流电机组成的驱动单元,驱动轮等。
2 智能机器人的自主避障控制系统的硬件电路设计2.1 主控制器ATmega128本系统主控制器选用的是A T M E L 公司A V R 单片机中的ATmega128。
AVR是ATMEL公司借鉴了成熟的51系列和PIC系列单片机的优点而推出的高性能8位单片机,具有速度快、成本低、资源丰富和低功耗等优点。
用于移动机器人避障的超声波测距系统
用于移动机 器人 避 障的超 声 波 测距 系统
杨 东 燕
( 内蒙古 机 电职 业 技 术 学 院 , 内蒙 古 呼和 浩 特 005 ) 10 1
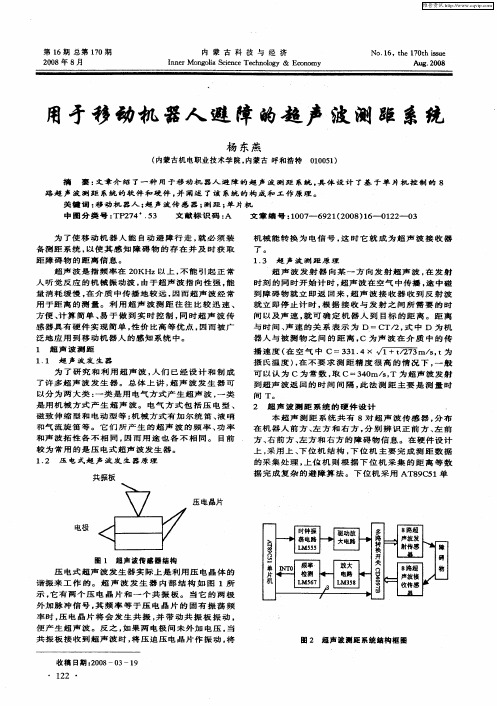
摘 要 : 章 介 绍 了 一 种 用 于 移 动 机 器 人 避 障 的 超 声 波 测 距 系 统 。 体 设 计 了基 于 单 片 机 控 制 的 8 文 具 路 超 声 波 测 距 系 统 的 软 件 和 硬 件 , 阐述 了该 系统 的 构 成 和 工 作 原 理 。 并
与 时 间 、 速 的 关 系 表 示 为 D = C 2, 中 D 为 机 声 T/ 式
泛 地应用 到移 动机 器人 的感知系统 中。
1 超 声 波 测 距
1 1 超 声 波 发 生 器 .
器 人 与 被 测 物 之 间 的 距 离 , 为 声 波 在 介 质 中 的 传 c
播 速 度 ( 空 气 中 C=3 1 4×  ̄ 在 3. / j
维普资讯
第l 6期 总 第 1 0期 7
20 0 8年 8 月
内 蒙 古 科 技 与 经 济
I n rM o g l ce c c n lg & Ec n my n e n oi S in eTe h oo y a oo
No 1 . 6,t e 1 0 h i u h 7 t s e s Au . 0 8 g 20
和 声 波 拓 性 各 不 相 同 , 而 用 途 也 各 不 相 同 。 目前 因
较 为 常 用 的是 压 电 式 超 声 波 发 生 器 。
1. 2 压 电 式 超 声 波 发 生 器 原 理
方 、 前 方 、 方 和 右 方 的 障 碍 物 信 息 。 在 硬 件 设 计 右 左
超声波避障机器人
编号:毕业设计(论文)题目:基于超声波测距的避障机器人控制系统设计学院:机电工程学院专业:机械设计制造与自动化姓名:卢大权学号: 1101110523指导教师:罗延平职称:讲师题目类型:☐理论研究☐实验研究☑工程设计☐工程技术研究☐软件开发2015 年 5 月 20 日摘要超声波测距避障机器人整体以塑料为架构、两前轮驱动后万向轮支撑,以小车形式展示。
选用STC12C5A60S2单片机为核心控制,加直流电机、超声波测距传感器、步进电机、温度补偿电路、DS1307时钟模块和电源稳压电路以及其他电路构成。
系统由单片机IO口控制驱动电机实现小车的前进后退以及转向并实现避障。
步进电机带动超声波测试周围障碍给单片机提供障碍物信息,单片机控制小车避开障碍物。
本系统还采用无源蜂鸣器及TFT模块实时显示温度及前方障碍物距离。
可通过调节PWM参数使L298N模块驱动直流电机调速,实现小车速度调节。
关键词:STC12C5A60S2 直流电机 L298N DS1307 超声波测距温度感器TFT模块避障机器人AbstractUltrasonic Ranging overall obstacle avoidance robot plastic as architecture, front-wheel drive after two caster support, in the form of a car show. Selection STC12C5A60S2 microcontroller core control, to direct current, ultrasonic distance sensor, stepper motor, temperature compensation circuit, DS1307 clock module and power supply voltage regulator circuit, and other circuits. System consists of microcontroller IO port control drive motor to achieve forward and backward, and steering the car and realize obstacle avoidance. Stepper motor drives the ultrasonic testing around obstacles obstacle information provided to the microcontroller, microprocessor control car avoiding obstacles. The system also uses a passive buzzer and TFT color screen real-time display of temperature and distance in front of the obstacle. Powered DC motors using L298N module drivers, PWM motor speed control can achieve car speed adjustment.Keywords:STC12C5A60S2 DC Motor L298N Ultrasonic ranging Temperature Sensor TFT modue目录摘要 (2)Abstract (3)1 引言 (6)1.1 选题的背景及意义 (7)1.2 机器人的发展综述 (8)2 超声波测距 (9)2.1 超声波概论 (9)2.2 两种常用的超声波测距方案 (10)2.2.1基于单片机的超声波测距系统 (10)2.2.2 基于CPLD 的超声波测距系统 (10)2.3超声波测距的工作原理 (11)2.3.1 超声波误差分析 (13)3 机器人的避障系统 (13)3.1 移动机器人的避障传感器 (14)3.1.1 激光传感器 (14)3.1.2 视觉避障 (14)3.1.3 超声传感器 (14)3.2 避障系统设计思想 (15)3.2.1超声传感器的幻影现象 (15)4 硬件系统设计 (16)4.1超声波测距系统硬件设计 (16)4.2 单片机控制模块 (18)4.2.1 STC12C5A60S2单片机的内部结构 (18)4.3单片机最小系统电路 (19)4.4 超声波发射收系统模块电路 (20)4.5 温度模块的设计 (22)4.5.1温度对声速的影响 (22)4.5.2DS18B20 (22)4.6 步进电机控制的设计 (24)4.6.1 步进电机简介 (24)4.6.2步进电机的结构 (25)4.6.3 ULN2003芯片概述与特点 (26)4.7动力电机模块 (27)4.7.1电机驱动模块 (28)4.8时钟模块 (29)4.9 显示模块的设计 (30)4.10电源模块 (32)4.11机器人避障的硬件系统 (33)4.11.1确定硬件选型 (33)4.11.2系统整体方案设计 (33)4.11.3微控制器模块的设计 (34)5 系统软件设计 (35)6 功能测试与总结 (38)6.1超声波测试 (38)6.2整体避障测试 (41)7.总结 (41)谢辞 (42)9.参考文献 (43)附件1 (44)1 引言现在,机器人一词在日常生活中大多数人们已经不再陌生,机器人的话题在生活中无处不在,如电影、新闻、玩具、工业等各行业。
超声波避障系统设计

• 引言 • 系统硬件设计 • 系统软件设计 • 系统测试与验证 • 系统优化与改进 • 结论与展望
01
引言
目的和背景
目的
设计一种能够实时检测障碍物并实现自动避障的超声波避障 系统,以提高机器人或无人驾驶车辆的安全性和自主性。
背景
随着机器人和无人驾驶技术的快速发展,避障系统成为了实 现自主导航的关键技术之一。超声波传感器因其价格低廉、 性能稳定、易于安装等优点而被广泛应用于避障系统中。
用户体验
用户友好型的设计使得该系统易于使用,无需复杂的设置 或培训。此外,系统还具备较高的性价比,适合大规模生 产和应用。
性能评估
经过实际测试,该系统在各种环境条件下均表现出良好的 稳定性和可靠性,且响应速度快,能够满足实时避障的需 求。
改进空间
尽管本设计在许多方面都取得了成功,但仍存在一些局限 性,如对复杂环境的适应性、系统精度和稳定性等方面还 有待进一步提高。
测距原理
超声波测距基于声波的传 播速度和往返时间计算距 离。
精度与误差
考虑声波传播速度、温度 和空气密度等因素对测距 精度的影响。
抗干扰能力
优化算法以减少环境噪声
根据系统需求,设计合适的硬件接口,如 GPIO、串口等。
定时器配置
使用定时器产生超声波发送和接收的时序。
传感器数据和控制避障系统。
性能要求
02
根据系统复杂性和数据处理需求,选择具有足够处理能力和I/O
端口的微控制器。
编程语言
03
确保微控制器支持所需的编程语言,以便进行系统开发和编程。
电源模块设计
电源选择
为系统提供稳定的电源,考虑使 用电池或外部电源,以满足系统 长时间运行的需求。
单片机课程设计超声波测距离

超声波测距系 统的功耗:功 耗较低,适合
长时间使用
评估指标:包括测量精度、 响应速度、稳定性等
测试方法:采用标准测试方法, 如距离测量误差、响应时间等
改进建议:针对测试结果,提 出改进方案,如优化算法、提
高硬件性能等
评估结果:对改进后的系统性 能进行再次评估,确保达到预
期效果
总结与展望
课程设计目标:掌握超声波测距原 理,提高实践能力
提高稳定性:通过 优化硬件设计和软 件算法,提高系统 的稳定性
拓展应用领域:将 超声波测距技术应 用于更多领域,如 机器人、无人机等
感谢您的观看
汇报人:
测试条件:温度、湿度、光照、 噪音等
测试方法:静态测试、动态测 试、模拟测试等
准备测试环境:确保测 试环境无干扰,温度适
宜,湿度适中
连接测试设备:将超声 波测距系统与测试设备 连接,确保连接稳定
设定测试参数:设定测 试距离、测试次数、测
试精度等参数
启动测试:启动超声波 测距系统,开始测试
记录测试数据:记录测 试过程中的距离、时间、
超声波传感器通过发射超声波信号,接收反射信号,计算距离 超声波传感器由发射器、接收器和信号处理电路组成 发射器发出超声波信号,接收器接收反射信号,信号处理电路计算距离 超声波传感器的测量精度与发射频率、接收灵敏度、信号处理算法等因素有关
超声波测距原理:通过测量超声波在空气中的传播时间和距离,计算目标物体的距离 误差来源:超声波在空气中的传播速度、温度、湿度、气压等环境因素的影响 误差分析:通过实验数据,分析误差来源和影响程度,提出改进措施 误差补偿:通过软件或硬件方法,对误差进行补偿,提高测量精度
● 优势: a. 控制精度高:可以精确控制超声波发射和接收的时间 b. 响应速度快:可以快速响应超声波信号的变化 c. 功耗低:适合长时间连续工作 d. 体积小:便于携带和安装
机器人避障的原理及分析

机器人避障的原理及分析机器人避障的原理和分析是指机器人在感知到障碍物时,能够自动进行规避或避免碰撞的能力。
这种能力对于机器人在各种环境中的自主移动和安全运行至关重要。
下面我们将从机器人感知技术、决策算法和执行控制三个方面来分析机器人避障的原理。
机器人的感知技术是实现避障的基础。
一般来说,机器人感知障碍物主要通过以下几种传感器实现:1.超声波传感器:超声波传感器通过发送超声波信号并计算信号的反射时间来确定物体与机器人之间的距离。
根据距离信息,机器人可以判断是否需要避障。
2.激光雷达:激光雷达是一种高精度测距传感器,能够测量物体与机器人之间的精确距离和方位信息。
通过激光雷达,机器人可以获得详细的环境地图,从而有效地规避障碍物。
3.视觉传感器:视觉传感器一般使用相机或摄像头,通过图像处理和计算机视觉算法来识别、跟踪和测量障碍物。
视觉传感器可以提供丰富的环境信息,但在复杂环境或光线不足时可能受到限制。
决策算法是机器人避障的核心。
一般来说,决策算法会根据传感器获得的环境信息进行分析和判断,并采取相应的措施规避障碍物。
常见的决策算法有:1.基于规则的方法:基于规则的决策算法将预先定义的规则应用于感知到的环境信息,从而判断机器人应该采取的动作。
例如,如果机器人检测到前方有障碍物,则应该停止或绕过障碍物。
2.基于学习的方法:基于学习的决策算法使用机器学习技术,通过分析大量的训练数据来学习如何判断和规避障碍物。
这种方法可以适应不同的环境和障碍物类型,具有较高的智能性和灵活性。
执行控制是机器人避障的最后一步。
一旦决策算法确定了机器人应该采取的动作,执行控制系统会将指令传达给机器人的执行器,如电机或轮子,以实现相应的运动。
执行控制系统需要与感知技术和决策算法紧密协作,确保机器人能够及时、准确地避开障碍物。
总体而言,机器人避障的原理是通过感知技术获取环境信息,利用决策算法分析和判断障碍物,然后通过执行控制系统执行相应的运动。
机器人避障超声波测距系统
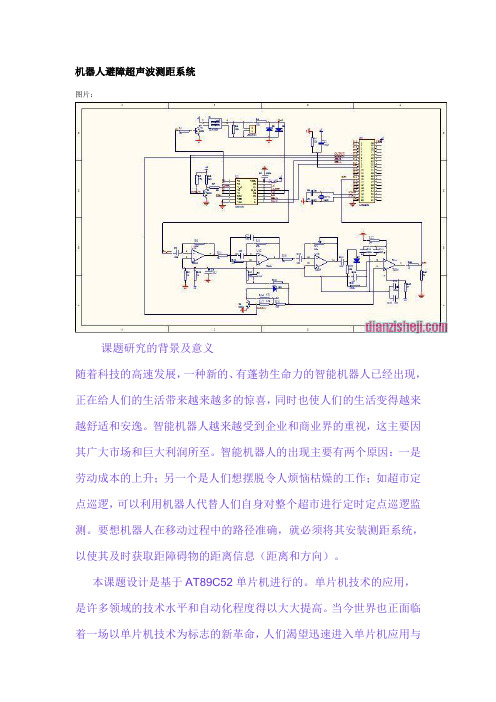
机器人避障超声波测距系统图片:课题研究的背景及意义随着科技的高速发展,一种新的、有蓬勃生命力的智能机器人已经出现,正在给人们的生活带来越来越多的惊喜,同时也使人们的生活变得越来越舒适和安逸。
智能机器人越来越受到企业和商业界的重视,这主要因其广大市场和巨大利润所至。
智能机器人的出现主要有两个原因:一是劳动成本的上升;另一个是人们想摆脱令人烦恼枯燥的工作;如超市定点巡逻,可以利用机器人代替人们自身对整个超市进行定时定点巡逻监测。
要想机器人在移动过程中的路径准确,就必须将其安装测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本课题设计是基于AT89C52单片机进行的。
单片机技术的应用,是许多领域的技术水平和自动化程度得以大大提高。
当今世界也正面临着一场以单片机技术为标志的新革命,人们渴望迅速进入单片机应用与开发的大门。
随着人们物质文化的丰富,各种电子产品开发也越来越先进,越来越迅速。
在超声波测距领域,为缩短开发周期、提高测距精度,单片机因为具有集成度高、运算速度快、体积小、运行速度快、体积小、运行可靠、工耗低等无与伦比的优势,以得到了广泛的应用。
当前,微型控制器正向两个方向发展,一个是高功能,多功能方向。
从这个方向取得的成就使得微型控制器逐步代替了价格昂,功能优越的中小型机;另一个是价格低廉,功能单一的方向,这个方向的发展是微型控制器在生产领域、服务部门和日常生活得到越来越广泛的应用。
目前我国的机器人避障的测距的研究和开发还处于起步阶段,还没有产业化。
另外,本课题的研究内容也适用于无人自动化工厂的自动导航小车以及移动机器人的路径规划。
由于机器人应用从制造业向非制造业的扩展,自主移动机器人智能机器人在诸如野外作业、深海探测、以及一些人类本身所不能进入的有毒或高温环境的作业中,有着广泛的应用前景,因此,近年来,有关移动机器人导航避障及路径规划的研究越来越多,就此而言,本课题的研究也是很有意义的。
超声波测距系统的设计

超声波测距系统的设计引言:超声波测距系统是一种常见的距离测量技术,利用超声波在空气中传播时的特性进行测量。
相对于光学传感器,超声波测距系统具有较低的成本、较小的体积和更大的测量范围。
因此,在工业自动化、机器人导航和智能设备等领域具有广阔的应用前景。
本文将介绍超声波测距系统的设计原理、硬件配置和软件实现,以及一些常见的应用案例。
一、设计原理:超声波测距系统的设计基于声音在空气中的传播速度,即声速。
根据超声波经过物体并反射回来所花费的时间,可以计算出物体与传感器之间的距离。
一般来说,超声波传感器由发射器和接收器组成。
发射器发出超声波脉冲,然后接收器接收到反射回来的超声波信号。
通过计算发射和接收的时间差,可以得到物体与传感器的距离。
由于超声波的传播速度与环境条件有关,如温度、湿度等,所以在进行距离计算时需要进行修正。
二、硬件配置:选择合适的超声波传感器是设计中的第一步。
一般来说,超声波传感器的频率越高,测量精度越高,但测量距离也越短。
因此,在选择传感器时需要根据具体应用需求进行权衡。
另外,传感器的外观尺寸和接口类型也需要考虑,以便与其他硬件设备进行连接。
控制电路主要由单片机和时钟模块组成。
单片机负责接收超声波信号,并通过定时器记录接收到信号的时间点。
时钟模块用于计时,以确定超声波传播的时间差。
显示电路可以选择LCD显示屏或数码管等设备。
显示电路的设计取决于测量结果的格式和精度要求。
一般来说,LCD显示屏具有更好的显示效果,但成本较高,而数码管则相对便宜但显示效果较差。
根据具体应用需求选择合适的显示电路。
三、软件实现:距离计算部分根据接收到信号的时间差和声速进行计算。
由于超声波的传播速度与环境条件有关,所以需要根据实际环境和传感器的特性进行修正。
通常可以通过校准来确定修正系数,并将其应用于距离计算公式中。
除了基本的测距功能,超声波测距系统还可以提供其他功能,如障碍物检测、移动物体跟踪等。
这些功能的实现主要依靠信号处理和算法设计。
超声波避障
嘉应学院毕业论文(设计)题目:果园喷雾机器人自动避障设计申请学位工学学士系别电子信息工程学院专业自动化学生姓名陈华逊学号 2061022154导师姓名胡均万(博士)摘要果园喷雾机器人在工作的时候不可避免地受到障碍物的干扰,障碍物会严重影响机器人的工作效率,严重会使机器人损坏,机器人还会对身边工作人员造成安全威胁,所以实现机器人的自动避障非常重要,由于果园机器人体型比较大,需要检测到远距离的障碍物,因此设计方法非常重要,本论文采用单片机80C51为核心,用T/R-40-12型超声波测距的方法检测障碍物,通过单片机对信号的处理,驱动电机的转向,前进与后退,从而达到自动避障的功能。
通过实践得出超声波的测距误差在5%之内,该设计的性能稳定,果园喷雾机器人能够绕开障碍物去实现对果树喷雾的目的。
关键词80C51单片机,果园喷雾机器人,超声波传感器,超声波测距AbstractOrchard spray when the robot at work inevitably be interference from obstructions, obstacles will seriously affect the efficiency of the robot, the robot would seriously damage, the robot will be on staff around a security threat, so to achieve automatic obstacle avoidance robot is very important, because relatively large size fruit robot needs to detect the distance of the barrier, so design is important In this thesis, 80C51 microcontroller core, with T/R-40-12 ultrasonic range finder to detect obstacles, the signal processing through the MCU to drive the motor turning, forward and backward, so as to achieve automatic obstacle avoidance function.Obtained through the practice of ultrasonic range error within 5% of the design of stable, orchard spraying robot can bypass the obstacles to achieving the purpose fruit spray.Keywords 80C51 microcontroller, orchard spray robot, ultrasonic sensors,ultrasonic ranging目录1绪论 (1)1.1 激光传感器 (1)1.2 视觉避障 (1)1.3 超声传感器 (1)1.4避障系统设计思想 (2)2系统设计 (3)2.1总系统设计 (3)2.2单片机输出电路的设计 (3)2.3障碍物的信息的采集 (4)3 超声波测距设计 (5)3.1超声波测距工作原理 (5)3.2超声波测距系统硬件设计 (5)3.3测距算法设计 (9)3.4程序流程 (10)3.5避障的实现 (11)4总结 (12)致谢 (13)参考文献 (14)附录 (15)1绪论移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。
超声波测距系统在拆垛机器人上的应用

超声波测距系统在拆垛机器人上的应用
2. 超声波测距系统原理
超声波测距系统是利用超声波的传播速度及其往返时间,计算出被测物体与测量器之间的距离的一种测距方法。
其原理如下:
(1)超声波的发射:超声波发射器将电能转化为机械振动,产生超声波信号。
(2)超声波的传播:超声波传播的过程中,会在与被测物体的表面发生反射、散射等现象。
(3)超声波的接收:超声波传播到被测物体后,被测物体会反射一部分超声波,传回到接收器中。
(4)测量距离:根据超声波传播的时间和声速的已知值,通过计算可以得到被测物体与测量器之间的距离。
3. 超声波测距系统结构
超声波测距系统主要由超声波发射器、接收器、控制电路和显示器等组成。
超声波发射器负责产生超声波信号,接收器负责接收反射回来的超声波信号,控制电路负责控制超声波的发射和接收,显示器负责显示测量结果。
4. 超声波测距系统在拆垛机器人中的应用
(1)拆垛机器人定位
拆垛机器人在进行拆垛作业之前需要准确定位被拆垛货物的位置。
超声波测距系统可以通过测量机器人到货物的距离,确定机器人与货物之间的相对位置,从而实现机器人的精确定位。
(2)拆垛机器人避障
在进行拆垛作业时,拆垛机器人需要避免与其他物体发生碰撞。
超声波测距系统可以实时测量机器人与障碍物之间的距离,当距离过近时,机器人可以及时停止或改变方向,避免碰撞事故发生。
超声波测距系统在拆垛机器人上的应用

超声波测距系统在拆垛机器人上的应用超声波测距系统在拆垛机器人上的应用可以提高拆垛作业的效率和安全性。
拆垛作业是指将一堆堆货物(如箱子、袋子等)从货架上取下,按照一定的规则摆放在指定的地方。
传统的拆垛作业需要人工操作,不仅效率低下,而且存在安全隐患。
而引入超声波测距系统后,可以实现自动化操作,提高拆垛作业的效率和安全性。
超声波测距系统主要由超声波发射器、接收器和信号处理器组成。
超声波发射器通过发射超声波信号,经过目标物体反射回来后被接收器接收到。
根据超声波的传播时间,可以计算出目标物体与拆垛机器人的距离。
1. 定位目标物体:拆垛机器人可以通过超声波测距系统准确地定位目标物体的位置。
通过计算目标物体与机器人的距离,可以确定机器人需要移动的距离和方向,以及抓取目标物体的位置。
2. 避障功能:超声波测距系统可以检测到障碍物的存在,并通过信号处理器将障碍物的位置信息传递给拆垛机器人。
机器人可以根据障碍物的位置来调整自身的路径,以避免碰撞或卡住的情况发生,提高作业的安全性。
3. 距离识别:超声波测距系统可以经过信号处理器对不同的距离进行识别。
根据不同的距离,拆垛机器人可以调整自身的操作方式。
当目标物体与机器人的距离较近时,机器人可以选择直接抓取;当距离较远时,机器人可以选择使用其他工具(如夹具)来抓取目标物体。
4. 位置校准:超声波测距系统可以对拆垛机器人的位置进行校准。
通过与已知位置的物体进行测距,并与实际位置进行对比,可以判断机器人当前的位置是否准确。
如果不准确,可以通过信号处理器对机器人进行调整,以确保机器人的位置精确。
超声波测距系统在拆垛机器人上的应用可以提高拆垛作业的效率和安全性。
它可以定位目标物体、实现避障功能、进行距离识别和位置校准等功能,使拆垛作业更加自动化、准确和安全。
超声波测距在机器人避障中的应用毕业论文

超声波测距在机器人避障中的应用毕业论文超声波测距在机器人避障中的应用毕业论文目录绪论 (1)1课题设计目的及意义 (1)1.1设计的目的 (1)1.2设计的意义 (1)2超声波测距仪的设计思路 (1)2.1超声波测距原理 (1)3课题设计的任务和要求 (2)第一章超声波测距系统硬件设计 (2)1 系统设计 (2)2 51系列单片机的功能特点 (3)3系统硬件结构的设计 (3)3.1 单片机显示电路原理 (4)3.2 超声波发射电路 (4)3.3 超声波检测接收电路 (4)3.4超声波测距系统的总电路 (5)第二章超声波测距系统的软件设计 (5)1 超声波测距仪的算法设计 (5)2主程序流程图 (6)3超声波发生子程序和超声波接收中断程序 (7)4 系统的软硬件的调试 (7)第三章超声波测距系统在智能机器人中的应用 (7)1 避障系统设计思想 (8)2 硬件设计 (8)3 软件设计 (9)总结 (12)致谢 (13)参考文献 (14)附录 (15)绪论1课题设计目的及意义1.1设计的目的随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;大力降低潜艇自噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
毕业设计(论文)基于超声波测距的机器人模糊避障研究

目录摘要 (2)1 引言 (3)1.1选题的背景及意义 (3)1.2 机器人的发展综述 (4)2 超声波测距 (5)2.1 超声波概论 (5)2.2 两种常用的超声波测距方案 (6)2.2.1 基于单片机的超声波测距系统 (6)2.2.2 基于CPLD 的超声波测距系统 (6)2.3超声波测距的工作原理 (7)3 机器人的模糊避障系统 (8)3.1 移动机器人的避障传感器 (8)3.1.1 激光传感器 (8)3.1.2 视觉避障 (8)3.1.3 超声传感器 (8)3.2 避障系统设计思想 (9)3.2.1超声传感器的幻影现象 (9)3.2.2 模糊避障算法设计 (10)4 硬件系统设计 (12)4.1超声波测距系统硬件设计 (12)4.2 单片机的内部结构 (13)4.3单片机最小系统电路 (13)4.4 超声波发射系统电路 (14)4.5超声波接收系统电路 (15)4.6 显示模块的设计 (16)4.7机器人避障的硬件系统 (17)5 系统软件设计 (18)6 结论与总结 (19)致谢 (21)参考文献 (21)附录1 (22)附录2 (23)基于超声波测距的机器人模糊避障研究电子信息工程***指导老师***摘要:移动机器人在工作的时候不可避免地受到障碍物的干扰,障碍物会严重影响机器人的工作效率,碰撞时更会使机器人损坏,所以实现机器人的自动避障非常重要。
本论文在分析了智能移动机器人避障常用传感器的基础上,提出了基于超声波传感器测距的移动机器人的模糊避障系统,详细介绍了超声波传感器的原理和特性,采用单片机AT89C52为核心,用超声波测距的方法检测障碍物,通过单片机对信号的处理,驱动电机的转向,左右前进与后退,从而达到自动避障的功能。
通过实践得出模糊避障控制机理和策略易于接受和理解,便于应用开发,模糊避障算法对环境有很大的适应性,机器人能在不同的环境条件下实现了避障。
关键词:AT89C52单片机;移动机器人;超声波传感器;超声波测距1 引言随着机器人技术的发展,自主移动机器人以其灵活和智能等特点,在人们的生产、生活中的应用越来越广泛。
移动机器人超声波测距避障系统设计

移动机器人超声波测距避障系统设计李恒;徐小力;左云波【摘要】Obstacle avoidance with ranging is one of robot′s competencies in adapting to unknown complex environment. It is very important to measure the distance between the robot and the obstacles accurately. An obstacle avoidance system with ultrasonic ranging by mobile robot is designed with dsPIC33FJ256MC710 as the core. The distance between the robot and the obstacles is measured with pulse echo method. Ultrasonic velocity temperature compensation circuit is designed for ultrasonic velocity changes as the ambient temperature. Experimental results show that the system ranging accurately and is able to meet the requirement of obstacle avoidance for mobile robot in complex environments.%测距避障是移动机器人适应未知复杂环境的能力之一,准确测出移动机器人和障碍物之间的距离是关键。
以dsPIC33FJ256MC710单片机为核心研究设计了一种移动机器人超声波测距避障系统。
该系统利用脉冲回波法测距,针对超声波在空气中的传播速度受环境温度的影响,设计了超声波速度温度补偿电路。
超声波测距在机器人避障中的应用

毕业论文(设计)工作记录附件3:毕业论文(设计)选题申请表(学生用) 学院:汽车学院时间:2012年6月26日毕业论文(设计)任务书学生陶陶(一号学生):毕业论文(设计)作业现发给你们。
毕业论文(设计)任务分配如下:一、毕业论文(设计)题目超声波测距在机器人避障中的应用二、主体能力提出了一种基于超声波传感器测距的移动机器人模糊避障系统。
以单片机AT89C51为核心,采用超声波测距法检测障碍物。
通过单片机的信号处理,驱动电机转向、前后左右移动,从而实现自动避障的功能。
三。
基本要求利用超声波测距来计算距离,从而实现移动机器人的顺利避障。
四。
主要参考文献【1】冯然,田,。
基于单片机的移动机器人自动避障控制系统。
中国仪器仪表,2001,3: 27-29。
【2】蔡美琴。
MCS-51系列单片机系统及其应用。
:高等教育,1999年4月【3】许,。
移动机器人的发展现状及趋势。
机器人技术与应用,2001年3月【4】文静余琴。
超声波测距仪在移动机器人避障中的应用,2006年6月【5】叶,王峰,魏照碧,等。
超声波测距仪的研究。
计算机测量和控制,2002年10月【6】桂峰,周东辉,王广信。
基于超声波传感器的机器人环境检测系统。
传感器技术,2005年2月【7】孟、齐勇、舒军等。
智能机器人及其发展。
中国海洋大学学报,2004,34 (5): 831-838【8】机器人多通道超声波环境探测仪的研制。
中国科学院研究生院学报,2002,19(2): 172-176【9】茅山。
超声波测距原理及实用技术。
实用测试技术,1994年1月【10】曾,存,等。
步行机器人超声波测距系统的研究。
机械科学与技术,2004,23(5): 613-616。
【11】王运涛、包青山等。
超声波测距系统在移动智能机器人中的应用。
理工大学学报。
1998,2,30(1):20-23【12】迎接新的一年等等。
单片机初级教程(单片机初级基础)。
航空航天大学【13】华等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人避障超声波测距系统第一章绪论1.1 课题研究的背景及意义机器人技术是在新技术革命中迅速发展起来的一门新兴学科,它在众多的科技领域与生产部门中得到了广泛的应用,并显示出强大的生命力。
它是集精密机械、光学、电子学、检测、自动控制、计算机和人工智能等技术于一体,形成的一门综合性的新技术学科。
机器人的发展有很长的历史,早在三国时代,诸葛亮造的“木牛流马”就是古代机器人的一种雏形。
机器人(robot)一词来源于 1920 年捷克作家卡雷尔·查培克所编写的戏剧中的人造劳动者,在那里机器人被描写成像奴隶那样进行劳动的机器。
后来作为一种虚构的机械出现在许多作品中,代替人们去完成某些工作。
在机器人发展历史上,存在两条不同的技术路线:一条是日本和瑞典所走的“需求牵引,技术驱动”,他们把美国开拓的机器人,结合工业发展的需求,开发出一定系列特定应用的机器人,如弧焊、点焊、建筑等等,从而形成了庞大的机器人产业;另一条是把机器人作为研究人工智能的载体。
看成是计算机科学的一部分,单纯从技术上仿人的某些功能出发研究机器人。
自从为了抓取放射性材料而设计制造的第一台遥控机械手诞生至今已经有50多年了,而六十年代第一台工业机器人问世也40多年了。
之所以当初称之为工业机器人是为了同虚构的机器人及玩具机器人加以区别。
目前所说的机器人大多指工业机器人。
第一代机器人,主要指只能以“示教-再现”方式工作的机器人。
示教内容为机器人操作机构的空间轨迹、作业条件、作业顺序等。
第二代机器人具有一定的感觉装置,能获取作业环境、操作对象的简单信息,通过计算机处理、分析,机器人作出一定的推理,对动作进行反馈控制,表现出低级的智能。
第三代机器人是指具有高度适应性的自治机器人,它具有多种感知功能,可进行复杂的逻辑思维判断决策,在作业环境中独立行动。
作为“第三代机器人”的智能机器人是这样一类机器人:机器人本身能对所处的工作环境、工作对象及其状态做出反映,它能根据人给予的指令和“自身”对外界的了解来独立的决定工作方法,利用操作机构和移动机构实现任务目标,并能适应工作环境的变化。
自主式移动机器人也属于智能机器人。
关于移动机器人的研究涉及许多方面。
首先,要考虑移动方式,可以是轮式的、履带式的、腿式的,对于水下移动机器人则是推进器。
其次,必须考虑驱动器的控制,以使机器人达到期望的行为。
第三,必须考虑导航和路径规划,对于后者,有更多的方面考虑,如传感器信息融合、特征提取、避障和环境映射等。
因此,移动机器人是一个集环境感知、动态决策、行为控制与执行等多功能于一体的综合系统。
在移动机器人自主行走的过程中,不可避免的会遇到一些障碍物,所以灵活、实时的避开这些障碍物是移动机器人必须拥有的一种基本能力。
为了实现这种能力,移动机器人必须通过外部传感器来收集周边环境的信息数据并通过这些信息建立起外部环境的模型,从而实现类似于人的避障行为。
在移动机器人环境探测的过程中,人们多采用视觉系统探测周围环境,并利用图象信号分析处理技术获得环境信息,从而引导机器人的运动。
比如,由浙江大学研究开发的以美国 TROBOT 公司ATRV-2 为平台的移动机器人,就是以放置在移动机器人上方的彩色CCD摄像机和安装在内部微机主板上的图象采集卡组成的视觉系统来探测前方障碍物。
采用视觉系统避障可以获得较完整的环境信息,但由于图象处理运算量大,需要高性能的信号处理设备,致使这类系统体积较大、能耗高、实时性差。
近年来,为了克服单纯视觉系统在应用上的不足,人们开始研究采用其他非摄像类传感器探测环境信息,直接采用多个廉价超声波传感器来进行测量。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
由于移动机器人具有一般机器人所不具备的移动能力,从而使之更具备“代替人”作业的实力。
移动机器人在移动过程中不可避免会遇到各式各样的障碍物,灵活、实时的躲开这些障碍物是衡量其性能的关键指标。
具有避障功能的移动机器人拥有相当高的社会价值,被大量应用于航天、军事、制造业、医疗、交通等。
比如在制造业中,柔性装配系统(FAS)是柔性制造系统的主要组成部分。
近年来,为响应产品换代的频繁变化,FAS的构形发生了很大变化,发达工业国家已出现了动态可重构形的柔性装配系统,在这类系统中,众多的具有避障功能的移动机器人代替了通用的传送带。
同样具有避障功能的移动机器人能给不能行走的残疾人士带来福音。
现在,大多数残疾人士使用电子轮椅,由于驾驶这种轮椅需要相当大的技巧,对于那些残疾人士来说,灵活自如的驾驶这类轮椅将有一定的难度。
而拥有自主导航和避障能力的移动机器人将轻易的解决这类问题。
1.2国内外研究现状从 80 年代开始,美国国防高级研究计划局专门立项,制定了地面无人作战平台的战略计划。
如 DARPR 的“战略计算机”计划中的自主地面车辆计划。
能源部制定了为期10 年的机器人和职能系统计划,以及后来的空间机器人计划。
美国 NASA 研究的火星探测机器人于 1997 年登上了火星。
为了在火星上进行距离探测,又开始了新一代样机的研制,命名为 Rocky7,并在 Lavic 湖的岩溶流上和干枯的湖床上进行了成功的试验。
美国的 MDARS 项目是在著名的保安机器人 ROBART 的基础上建立的一个多移动机器人平台,后来在指定地点执行随机巡逻任务。
德国研制了一种轮椅机器人,并在乌尔姆市中心车站的客流高峰期的环境中和 1998 年汉诺威工业商品展览会大厅环境中进行了超过36 小时的考验,所表现出的性能是其它现存的轮椅机器人和移动机器人所不可比的。
对机器人自主性的挑战来自要求完成的任务以及高度非结构化和变化的环境。
在大多数室外环境中,要求机器人完全自主的完成任务目前还有一定的困难。
远程操作的半自动机器人,毫无疑问是一个发展方向,因此先进的远程操作技术是将来必需的。
国内在移动机器人的研究上起步较晚,大多数尚处于某个单项研究阶段,主要的研究工作有:清华大学智能移动机器人于1994 年通过鉴定,涉及到五个方面的关键技术:基于地图的全局路径规划研究;基于传感器信息的局部路径规划研究;路径规划的仿真技术研究;传感器技术、信息融合技术研究;智能移动机器人的设计和实现。
另外,还有中国科学院沈阳自动化研究所的 AGV和防暴机器人;中国科学院自动化自行设计、制造的全方位移动机器人视觉导航系统;哈尔滨工业大学于 1996 年研制成功了导游机器人。
随着汽车的普及,大中城市中的慢性堵塞和交通事故的增加已成为一个大的社会问题。
尤其在高速公路上行驶的汽车,时速通常在100公里每小时以上,一旦出现险情,留给驾驶员的时间是很短的,世界各地,由于雨、雾等原因引起的高速公路上的恶性交通事故时有发生。
如何利用汽车和道路的智能化来提高安全性能和交通效率已成为各发达国家关注的热点。
因此,目前移动机器人的研究开始偏向汽车的自主驾驶和辅助驾驶的研究。
部分发达国家重要的研究计划包括:●美国: IVHS(智能车辆高速公路系统)●欧洲: AVS(先进安全车辆)SSVS(超级灵巧车辆系统)VICS(车辆信息和通信系统)ARTS(先进道路运输系统)UTMS(通用交通管理系统)●中国:THMR-V(清华大学)这些计划中,各极其重要的环节是能在汽车行驶过程中探测障碍物与行人,并发出报警、自动启动刹车和避障的关键技术。
[15][17] 1.3本课题内容本文主要设计了机器人避障测距系统的硬件部分,主要有以下内容:(1)了解机器人避障超声波测距的研究背景,国内外发展状况,提出课题的研究意义。
(2)对测距技术进行研究,就当前比较流行的激光测距技术和超声波测距技术的原理进行探讨,比较两种测距的优缺点,针对本课题的实际,提出采用超声波测距的优势所在。
(3)提出系统硬件设计方案。
初步探讨了超声波传感器的工作原理。
概括性地叙述了超声波发送电路以及接收电路中的限幅、多路电子开关、放大、滤波、整流以及比较等几部分。
由于在设计过程中为了使系统稳定,必须对串扰问题进行解决,为此,还介绍了串扰处理电路的设计,还把针对本课题的AT89C52单片机控制系统进行说明。
(4)简单介绍了单片机的编程语言—C51语言及软件设计的流程图。
然后针对本课题提出软件编程方案:采用模块化设计,整个程序的编写分主程序、发射子程序、中断接收子程序、定时子程序等模块进行。
第二章机器人避障策略和测距方式的研究2.1 路径规划和避障策略所谓路径规划就是智能自主移动机器人能按照存储在其内部的地图信息,或根据外部环境所提供的一些引导(既通过对环境的实时探测所获得的信息)规划出一条路径,并能够沿着该路径在没有人工干预的情况下,移动到预定目标,同时完成预定任务。
执行这个过程的算法就是路径规划算法。
移动机器人有多种导航方式,根据环境信息的完整程度、导航指示信号类型、导航地域等因素的不同,可以分为基于地图导航、基于路标导航、基于视觉导航、基于感知器导航等。
目前还出现了其他的导航系统,如美国的GPS卫星导航系统。
本文主要研究的基于超声波传感器避障属于感知器导航。
最优路径的搜索既可以采用软件的方法,也可以根据退火算法利用硬件来实现路径规划,这种方法虽不能保证所得的路径绝对最优,但能以较小的时间代价来换取相对优化的路径;基于环境拓扑特征的路径规划可以减少对地图精确性的依赖,从而扩大路径规划的范围。
当移动机器人通过各种传感器获得一定量的周围环境信息时,如何利用这些有限的环境信息,来实现机器人的实时控制,一直是机器人研究者所关心的一个问题,这也是移动机器人进行实时避障所必须解决的一个难题。
为此,许多新颖而实用的控制算法被提出来,在一定程度上解决了这个问题。
他们一般能分为两类:全局规划与局部控制。
在此,对几种比较常用的控制算法作出简单的介绍。
由于移动机器人在避障过程中需要较强的实时性,所以要求控制算法具有较强的处理数据的能力,势场法作为全局规划方法的一种方面具有一定的优势。
对于势场法而言,每一个障碍物都由一个二维的笛卡尔栅格来表示。
目标位置对移动机器人产生一种虚拟的吸引力,而障碍物对机器人产生一种虚拟的排斥力。
这两种力的合成就决定了移动机器人的运动。
然而势场法也具有自身的缺点,主要表现在 4 个方面:(1)存在陷阱区域;(2)在相近障碍物之间不能发现路径(3)在障碍物前振荡;(4)在狭窄通道中摆动。
局部控制的方法主要应用在一个未知的环境中。
它是一种完全基于传感器信息的反映策略。
因此机器人和环境中的障碍物的绝对坐标并不需要知道,但必须了解其相对位置及关系,所以大量的传感器被利用来探测周边的环境信息。