刘朝友-装备设计大作业
可靠性仿真在鱼雷产品上的应用
可靠性仿真在鱼雷产品上的应用王斗辉 1, 陈 欢 2, 郭 君 2, 吴 斌 2(1. 工业和信息化部 电子第五研究所, 广东 广州, 615123; 2. 中国船舶集团有限公司 第705研究所, 陕西 西安, 710077)摘 要: 针对传统可靠性试验耗时长、成本高的问题, 给出了可靠性仿真的基本内容和工作流程, 针对鱼雷产品中的典型电子组件开展可靠性仿真建模、热应力和振动应力仿真分析、故障预计和可靠性评估, 以得到产品设计薄弱环节、潜在故障信息和平均首发故障时间等。
分析结果表明, 可靠性仿真能够确保在鱼雷产品设计早期消除故障源, 从而提高鱼雷产品的鲁棒性和故障预测能力。
关键词: 鱼雷; 可靠性; 电子组件; 仿真建模; 应力分析中图分类号: TJ630 文献标识码: A 文章编号: 2096-3920(2024)01-0166-08DOI: 10.11993/j.issn.2096-3920.2023-0030Application of Reliability Simulation in Torpedo ProductsWANG Douhui1, CHEN Huan2, GUO Jun2, WU Bin2(1. CEPRI, Guangzhou 615123, China; 2. The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China)Abstract: The traditional reliability test is time-consuming and requires high cost. Therefore, this article provided the basic content and workflow of reliability simulation and conducted reliability simulation modeling, thermal stress simulation analysis, vibration stress simulation analysis, fault prediction, and reliability evaluation for typical electronic components in a certain torpedo product, so as to obtain weak links in product design, potential fault information, and average first failure time. The analysis results show that the reliability simulation can ensure the elimination of fault sources in the early stage of torpedo product design and thus improve torpedo product robustness and fault prediction ability.Keywords: torpedo; reliability; electronic components; simulation modeling; stress analysis0 引言随着技术的发展, 对装备可靠性水平的要求越来越高, 但对研制和生产周期的要求则越来越短,完全按传统的典型环境仿真方法对装备进行可靠性试验, 对于可靠性指标要求较高的产品, 无论是时间还是试验费用等都难以保证, 为此需要找到一种在研制初期即可针对仿真模型, 在开展建模仿真的基础上进行可靠性设计及评价的新途径。
刘大招储砂罐设计

维修电工技师毕业设计说明书目录前言 (2)1可变控制器的概述 (3)2.PLC简介 (4)2.1 PLC 的特点 (4)2.2 PLC 的选择和I/O分配 (5)3. PLC 控制的工作过程 (9)3.1单步点动工作 (9)3.2手动工作 (10)3.3自动控制 (10)3.4紧急停止 (11)4. 外部接线图 (11)5 梯形图和语句表 (25)6. PLC改造效果 (25)7 参考文献 (26)8 结束语 (27)9 谢辞 (27).附录 (27)附录1 主电路图 (28)附录2 控制面板示意图 (29)附录3 传送带示意图 (30)附录4 储砂罐三视图 (31)前言正文稿微机技术已经并继续在改变世界,以微机技术为基础的可编程控控制器也正在改变着工厂自动控制的新面貌,随着可控可编控制器的普及和推广,它以其可靠性极高,能经受恶略环境的考验,使用极其方便的巨大优越性,迅速占领工业自控领域,成为工业自动控制的首选产品,特别是在许多新建,扩建项目和设备的技术改造中常采用PLC作为控制装置。
本人通过这次在维修电工技师班的学习,掌握了一些可编控制器设计的基本方法,以及一些特点,怎么样去合理的选用PLC,正确的布局布线来提高控制系统的可靠性和系统性价比,有感于此,我查阅了有关于三菱可编程控制器的资料,然后结合本单位现有设备极其运行情况,特别选择了修船设备的储砂罐的控制系统为背景设计了一套自动控制程序。
在本论文的编写过程中,我得指导老师:赵培和老师;以及开发区技能鉴定中心的孙增全老师。
他们都给予了我莫大的帮助及指导,在论文的编写和设计中提出了很多宝贵意见,通过多次于他们讨论解决当中遇到的问题,同时还有我的许多同事也都给大力支持和帮助。
没有他们的支持和帮助,要完成论文是不可想象的,在此表示衷心的感谢。
编写过程中,由于本人水平有限,错误和不妥之处在所难免,欢迎各位老师和各位同事给予批评指正。
编写:刘大招2010-12-121.可编程控制器的概述新型控制器应具有十项条件进行招标;编程方便,可在现场修改程序;维修方便,最好可编程控制器是一种以计算机为核心的通用工业装置,是现代新型工业控制的标志产品。
【浙江省自然科学基金】_优化分析_期刊发文热词逐年推荐_20140811

茚满二酮 苹果 花(鱼骨) 芯片毛细管电泳 芒果 船舶协同设计 自组织模式 自激脉冲射流喷嘴 能耗分析 聚丙烯 美感指数 网络性能 编码问题 绿色制造模式 结构优化 织物 红曲菌 素质结构 系统开发 粒径 粒子群算法 粒子碰撞算法 算法 移动目标跟踪 硬质材料球体 研磨 砂轮廓形 石墨炉原子吸收光谱法 电泳图谱 电泳,凝胶,双向 电极直径 电极环 电化学免疫传感器 甲胎蛋白抗原 田口法 田口方法 现代中药 环形电极 特征点 物流 熔融指数 激活函数类型优化 激励相容 激光诱导荧光 溶胶-凝胶 混杂流水作业 混合制冷剂 液压制动系 测定 浊点萃取 流量预测 流域 汽车制造企业
推荐指数 8 6 5 5 2 2 2 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
科研热词 优化 遗传算法 优化设计 粒子群算法 离子色谱 有限元分析 财务困境预测 粒子群优化 稳定性 无线传感网络 数据挖掘 径向基函数神经网络 建模 响应面分析 反应体系 双阳极电化学氢化物发生 关联规则 产品设计 麂角杜鹃 香菇 预测控制 预测式 预冷 非线性系统 静电致动器 随机网络 阳离子 锑 银染 铜粉 铌酸锂基片 钱塘江 钌联吡啶 采样周期 配色方案 配煤 配合比优化 运动补偿 辣椒(capsicum 轻量化结构 车间作业 车辆密度 路径分析 跨界污染 超磁致伸缩 超声加工 资源整合 贝叶斯置信网 谐振频率 调度 调制特性 评价体系
卢焱装备设计大作业

机械装备大作业卧式升降台铣床主传动系统设计学院:机电学院专业:机械设计制造班级:1008104班姓名:卢焱学号:1100800921哈尔滨工业大学目录一、设计任务................................................................................................. 错误!未定义书签。
二、运动设计 (2)1 确定转速系列 (2)2 绘制转速图 (2)3 确定变速组齿轮传动副的齿数及定比传动副带轮直径 (4)4 绘制传动系统图 (6)5 核算主轴转速误差 (7)三、动力设计 (8)1 传动轴的直径的确定 (8)2 齿轮模数的初步计算 (9)参考文献 (10)(一)设计任务设计题目:卧式升降台铣床主传动系统设计已知条件:工作台面积320×12500mm2,最低转速31.5r/min,公比φ=1.41,级数Z=12,切削功率N=4KW。
设计要求:1.运动设计:确定系统的转速系列;分析比较拟定传动结构方案;确定传动副的传动比和齿轮的齿数;画出传动系统图;计算主轴的实际转速与标准转速的相对误差。
2.动力设计:确定各传动件的计算转速;初定传动轴直径、齿轮模数。
(二)运动设计1、确定转速系列已知最低转速为31.5r/min ,公比φ=1.41,查教材表标准转速系列的本系统转速系列如下:35.5 45 63 90 125 180 250 355 500 710 1000 1400 则转速的调整范围max min 14004431.5n n R n ===。
确定结构式传动组和传动副数可能的方案有: 1)12=4⨯3 12=3⨯4 12=3⨯2⨯2 12=2⨯3⨯2 12=2⨯2⨯3前两个方案虽然可以减少轴的数目,但有一个传动组内有四个传动副。
若采用一个四连滑移齿轮,则会增加轴向尺寸;若用两个双联滑移齿轮,操纵机构必须互锁防止两滑移齿轮同时啮合。
机械设计学大作业模板

机械设计学课程作业目录第1章项目规划 (1)1.1 项目背景分析 (1)1.2 设计任务书 (1)第2章功能分析 (2)2.1 设计任务分析 (2)2.1.1 总功能提炼 (2)2.1.2 系统边界确定 (2)2.2 功能分析 (2)2.2.1 功能分解 (2)2.2.2 确定功能结构 (2)第3章系统原理方案设计 (4)3.1 功能单元求解 (4)3.2 系统原理方案确定 (4)3.2.1 系统原理方案求解 (4)3.2.2 方案评价 (4)3.2.3 系统原理方案确定 (4)第4章总体设计 (5)4.1 机构简图 (5)4.2 结构草图 (5)第5章总结 (6)第1章项目规划1.1项目背景分析随着生活节奏的加快,速食食品越来越多的为大众所接受。
自助火锅在这种前景下应运而生。
速食肉丸的需求越来越大。
普通的人工做肉丸已满足不了这种需求。
肉丸成型机的设计需求呼之而出。
肉丸成型机所做肉丸,不仅能满足店家要求,而且可做为食品厂商的选择,为普通家庭提供速冻系列肉丸,市场前景一片光明。
1.2设计任务书设计任务书设计要求生产率Q=200-250个/分肉丸直径d=25~30mm第2章功能分析2.1设计任务分析2.1.1总功能提炼把调制好的肉浆用小勺制成肉丸2.1.2系统边界确定系统黑箱2.2功能分析2.2.1功能分解功能树主功能———分功能———2.2.2确定功能结构功能结构图第3章系统原理方案设计3.1功能单元求解3.2系统原理方案确定3.2.1系统原理方案求解系统原理方案形成方案初选3.2.2方案评价3.2.3系统原理方案确定第4章总体设计4.1机构简图4.2结构草图第5章总结。
机械制造装备及设计课程设计大作业
机械制造装备及设计课程设计大作业下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!一、引言在机械制造装备及设计课程的学习中,大作业是对所学知识和技能的综合运用和实践,也是对学生能力的一次综合考验。
自动玻璃推送装置结构与控制流程设计
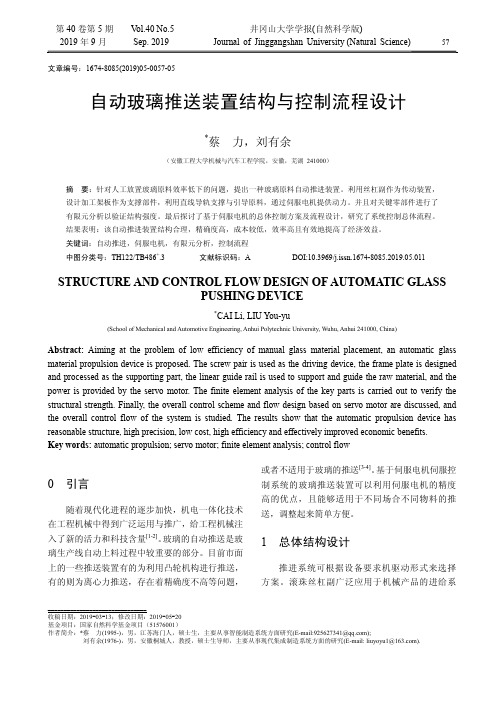
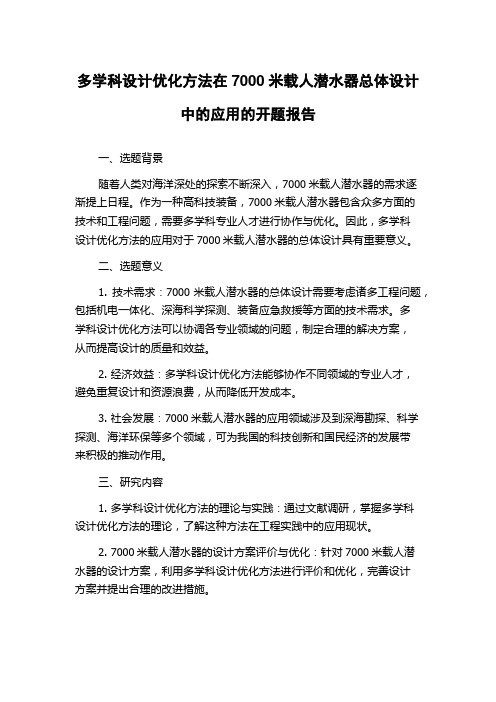
1. 移动架板;2. 直线导轨;3. 伺服电机;4. 丝杠副;5. 底座
自动玻璃推送装置结构与控制流程设计
*蔡 力,刘有余
(安徽工程大学机械与汽车工程学院,安徽,芜湖 241000)
摘 要:针对人工放置玻璃原料效率低下的问题,提出一种玻璃原料自动推进装置。利用丝杠副作为传动装置,
设计加工架板作为支撑部件,利用直线导轨支撑与引导原料,通过伺服电机提供动力。并且对关键零部件进行了
图 1 玻璃推送装置整体结构 Fig.1 Overall structure of glass push device
0 引言
随着现代化进程的逐步加快,机电一体化技术 在工程机械中得到广泛运用与推广,给工程机械注 入了新的活力和科技含量[1-2]。玻璃的自动推送是玻 璃生产线自动上料过程中较重要的部分。目前市面 上的一些推送装置有的为利用凸轮机构进行推送, 有的则为离心力推送,存在着精确度不高等问题,
或者不适用于玻璃的推送[3-4]。基于伺服电机伺服控 制系统的玻璃推送装置可以利用伺服电机的精度 高的优点,且能够适用于不同场合不同物料的推 送,调整起来简单方便。
1 总体结构设计
推进系统可根据设备要求机驱动形式来选择 方案。滚珠丝杠副广泛应用于机械产品的进给系
_______________________________
收稿日期:2019-03-13;修改日期:2019-05-20 基金项目:国家自然科学基金项目(51576001) 作者简介:*蔡 力(1995-),男,江苏海门人,硕士生,主要从事智能制造系统方面研究(E-mail:925627341@);
《功能设计作业设计方案-2023-2024学年高中通用技术地质版2019》

《功能设计》作业设计方案第一课时一、作业内容简介本次作业设计旨在让同砚通过设计一个功能性产品或系统来展示他们对功能设计的理解和应用能力。
同砚将在小组中合作完成一个实际的功能设计项目,并最终提交一个完备的设计方案报告。
二、作业目标1. 援助同砚理解功能设计的基本观点和原则。
2. 提高同砚的团队合作能力和创设性思维。
3. 培育同砚的设计规划和项目管理能力。
4. 提升同砚的沟通表达能力和设计报告撰写能力。
三、作业流程1. 第一阶段:团队组建和项目选题同砚将自行组建小组,每组3-5人。
在确定小组成员后,同砚需要共同谈论并确定一个功能设计项目标选题,包括项目标背景、目标、用户群体等。
2. 第二阶段:需求分析和功能设计小组成员将共同进行需求分析,明确产品或系统的功能需求和特点。
在此基础上,同砚将展开功能设计,包括功能模块划分、界面设计、交互设计等。
3. 第三阶段:原型制作和测试同砚将利用设计软件制作产品或系统的原型,并进行内部测试和改进。
在此过程中,同砚需要不息调整和完善设计方案,确保产品或系统的功能性和用户体验。
4. 第四阶段:设计方案报告撰写最终,同砚将依据完成的功能设计项目撰写设计方案报告,包括项目背景、需求分析、功能设计、原型展示、测试结果等内容。
报告将以小组为单位提交。
四、作业评判标准1. 项目选题的创新性和好用性2. 需求分析的深度和准确性3. 功能设计的合理性和完备性4. 原型制作的精细度和可操作性5. 设计方案报告的明晰度和完备性五、作业资源筹办1. 设计软件:如Axure、Sketch、Adobe XD等2. 报告撰写工具:如Word、PPT等3. 硬件设备:如电脑、平板等4. 进修资料:如功能设计相关书籍、文章等六、作业实施时间本次作业设计将在一个学期内完成,详尽时间打算如下:- 第1-2周:团队组建和项目选题- 第3-6周:需求分析和功能设计- 第7-10周:原型制作和测试- 第11-14周:设计方案报告撰写七、作业效果展示同砚将在教室上展示他们的功能设计项目,并向老师和同砚介绍设计思路和效果。
“大作业”模式在石油工程专业课程教学中的应用探讨
“大作业”模式在石油工程专业课程教学中的应用探讨作者:钟会影尹洪军来源:《高教学刊》2020年第18期摘要:结合近年来石油行业低迷对石油工程专业学生学习兴趣与其信心冲击的形势,以及专业认证的背景,提出了专业教学过程中从传统作业转变向课程“大作业”模式的教学方法,探讨了其必要性、可行性及实施办法,并以《试井分析》课程的应用为例,认为“大作业”模式可弥补传统作业在知识点布局单一化、固定化及潜在抄袭等方面存在的不足,能充分而有效调动学生的积极性,提高其对专业课程的学习兴趣,并促进课程知识点的融会贯通与实际应用,进而提高学生的专业综合应用能力和自信心,应对行业低迷对人才培养环节的诸多挑战。
关键词:“大作业”模式;课程教学;学习兴趣;人才培养;石油工程中图分类号:G642 文献标志码:A 文章编号:2096-000X(2020)18-0107-04Abstract: Combined with the impact of the fall in oil prices on the study interest and confidence of petroleum engineering students in recent years, as well as the background of professional certification, this paper presents the change of teaching method from the traditional homework to the "Great Assignment" mode in professional teaching, the necessity, feasibility and implementation method are discussed. Taking well test analysis class as an example, we believe that the mode of " Great Assignment" can make up for the deficiency of traditional homework in the knowledge points layout, simplification, immobilization and potential plagiarism, which can arouse students' initiative effectively, enhance their interest in studying professional courses, and promote the integration and practical application of knowledge points. The "Great Assignment" can improve students' comprehensive professional application ability and self-confidence. So we can face the challenges on talent cultivation during the fall in oil price.Keywords: "Great Assignment" mode; course teaching; study interest; talent cultivation; petroleum engineering尽管当前油价已突破有利于全球经济增长的“最佳区域”,但近年来油价的长期低位徘徊给关乎行业发展的各个层面带来了不容忽视的影响,如在此形势下,不仅从事石油工程技术领域的专业人员面临着前所未有的挑战,而且整个相关于石油工程行业毕业生的就业形式也步入了低迷期,造成学生对自己所学的专业在一定程度上失去自信心,引发了转行就业或者选择其它专业进行深造等一系列潜在的问题,这对于石油高校人才培养是一种困境。
多学科设计优化方法在7000米载人潜水器总体设计中的应用的开题报告
多学科设计优化方法在7000米载人潜水器总体设计中的应用的开题报告一、选题背景随着人类对海洋深处的探索不断深入,7000米载人潜水器的需求逐渐提上日程。
作为一种高科技装备,7000米载人潜水器包含众多方面的技术和工程问题,需要多学科专业人才进行协作与优化。
因此,多学科设计优化方法的应用对于7000米载人潜水器的总体设计具有重要意义。
二、选题意义1. 技术需求:7000米载人潜水器的总体设计需要考虑诸多工程问题,包括机电一体化、深海科学探测、装备应急救援等方面的技术需求。
多学科设计优化方法可以协调各专业领域的问题,制定合理的解决方案,从而提高设计的质量和效益。
2. 经济效益:多学科设计优化方法能够协作不同领域的专业人才,避免重复设计和资源浪费,从而降低开发成本。
3. 社会发展:7000米载人潜水器的应用领域涉及到深海勘探、科学探测、海洋环保等多个领域,可为我国的科技创新和国民经济的发展带来积极的推动作用。
三、研究内容1. 多学科设计优化方法的理论与实践:通过文献调研,掌握多学科设计优化方法的理论,了解这种方法在工程实践中的应用现状。
2. 7000米载人潜水器的设计方案评价与优化:针对7000米载人潜水器的设计方案,利用多学科设计优化方法进行评价和优化,完善设计方案并提出合理的改进措施。
3. 方案验证与实现:根据优化后的设计方案,进行方案验证和实现,测试其可行性,确保方案的科学性和可操作性。
四、研究方法1. 文献调研法:查阅多学科设计优化方法的相关文献,了解其理论与应用现状,让自己更加深入地了解多学科设计优化方法的理念和含义。
2. 问卷调查法:对7000米载人潜水器设计方案进行调查,收集来自多个专业领域的专家意见,从而了解各专业领域的技术需求和实际应用情况。
3. 统计分析法:将收集到的数据进行统计和分析,评价各设计方案的实用性和优化效果,从而得出最优解。
五、预期成果1. 掌握多学科设计优化的理论及其应用方法;2. 完成7000米载人潜水器的总体设计方案评价和优化,并提出改进建议;3. 验证优化后的设计方案的可行性和实现性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械装备大作业卧式升降台铣床主传动系统设计学院:机电学院专业:机械设计制造及其自动化系班级:1008104班姓名:刘朝友学号:1100801005哈尔滨工业大学目录一、设计任务................................................................................................. 错误!未定义书签。
二、运动设计 (1)1 确定转速系列 (1)2 绘制转速图 (2)3 确定变速组齿轮传动副的齿数及定比传动副带轮直径 (3)4 绘制传动系统图 (5)5 核算主轴转速误差 (6)三、动力设计 (7)1 传动轴的直径的确定 (7)2 齿轮模数的初步计算 (8)3、选择带轮传动带型及根数 (9)参考文献 (9)一、设计任务设计题目:卧式升降台铣床主传动系统设计已知条件:工作台面积320×12500mm2,最低转速31.5r/min ,公比φ=1.41,级数Z=12,切削功率N=5.5KW 。
设计任务:1. 运动设计:确定系统的转速系列;分析比较拟定传动结构方案;确定传动副的传动比和齿轮的齿数;画出传动系统图;计算主轴的实际转速与标准转速的相对误差。
2. 动力设计:确定各传动件的计算转速;初定传动轴直径、齿轮模数;选择机床主轴结构尺寸。
二、运动设计1、确定转速系列已知最低转速为31.5r/min ,公比ϕ=1.41,查教材表标准转速系列的本系统转速系列如下:31.5 45 63 90 125 180 250 355 500 710 1000 1400r/min 则转速的调整范围max min 140044.4431.5n n R n === 1)传动组和传动副数可能的方案有:12=4⨯3 12=3⨯4 12=3⨯2⨯2 12=2⨯3⨯2 12=2⨯2⨯3前两个方案虽然可以减少轴的数目,但有一个传动组内有四个传动副。
若采用一个四连滑移齿轮,则会增加轴向尺寸;若用两个双联滑移齿轮,操纵机构必须互锁防止两滑移齿轮同时啮合。
故不采用。
对于后三个方案,遵循传动副“前多后少”的原则,选取方案12=3⨯2⨯22)确定结构式12=3⨯2⨯2方案中,因基本组和扩大组排列顺序的不同而有以下6种扩大顺序方案:63122312⨯⨯=, 61222312⨯⨯=, 16222312⨯⨯= 36122312⨯⨯=, 21422312⨯⨯=, 12422312⨯⨯=方案1,2,3,4的第二扩大组26x =,2p =2,则2r =max )12(68r ==-⨯ϕ是可行的。
方案5,6中,2x =4,23p =,则2r =max )13(416r 〉=-⨯ϕ,不可行。
在可行的1,2,3,4方案中,为使中间传动轴变速范围最小,采用扩大顺序与传动顺序一致的传动方案1,13612322=⨯⨯。
综上所述,结构式13612322=⨯⨯对于该结构式中的第二扩大组26x =,2p =2,因此r2=φ8×(2-1)=1.416=82r ϕ=。
该方案符合升二降四原则。
2、绘制转速图 (1) 选定电动机本题已经确定切削为5.5KW ,4极电机,由于机床结构未定,按公式=0.8P P 切主估算主电机功率为6.875KW 。
参照相关手册选择Y132M-4型电机。
Y132M-4型电机主参数如下: 额定功率 7.5KW 满载转速 1440r/min 起动转矩/额定转速 2.2 最大转矩/额定转矩 2.2 (2) 确定传动轴的轴数和各转速按从主轴向电机分配传动比,并按照升二降四、先快后慢原则分配;同时考虑铣床主轴的飞轮效应,第三级传动副应选最大降速比,以使主轴上大齿轮直径较大,适应断续切削;考虑定比传动使用带轮传动,降速比不能太大,故尽量提高各传动轴转速。
有如下分配:由于第二扩大组的变速范围为8)12(6=-⨯ϕ,可知两个传动副的传动比必然是极限值:,/14/141ϕ==c u ,1/1/222ϕ==c u于是,可以确定轴Ⅲ的六种转速只能是125 180 250 355 500 710r/min 轴Ⅱ各转速确定第一扩大组的级比指数为3,在传动比极限范围内,轴Ⅱ的转速最高可为500 710 1000r/min ;最低转速可为180 250 355r/min 。
为了避免升速,又不使传动比太小,可取,/18.2/131ϕ==b u 12=b u于是就确定了轴Ⅱ的转速为355 500 710r/min轴Ⅰ各转速确定同理,轴Ⅰ可取,/12/121ϕ==a u ,/141.1/12ϕ==a u 13=a u于是就确定了轴Ⅰ的转速为710r/min 。
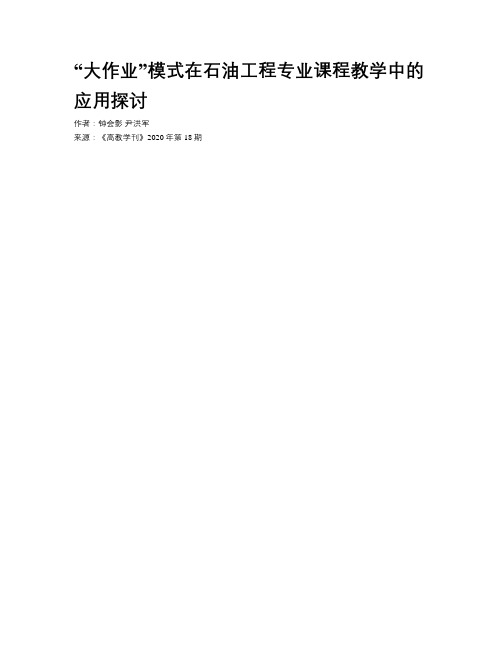
电动机与轴Ⅰ之间为定比传动,传动比为1440/710≈2=21/ϕ (3) 分配总降速传动比分配如下(转速图):主传动系统转速图3、确定变速组齿轮传动副的齿数及定比传动副带轮直径 (4) 确定带轮直径根据电机功率为7.5KW ,电机类型为Y 型电机,执行机构类型为金属切削机床,设每天工作8-16小时。
可得设计功率为:1.27.59d A P K P KW ==⨯= 其中: K A 为工况系数,查GB/T 13575.1-1992取1.2P 为电机功率根据P d 和n 在下图中选择带型和小带轮直径,摘自机械设计手册。
abc1400710 1000 500 355 250 180 125 456390参照GB/T 10412-2002普通V 带直径优选系列选择A 型带小带轮直径125mm 。
则大带轮直径为:121440(1)125(10.02)248710n D dmm n ε=-=⨯-= D 应取250mm其中: ε为转速损失率但此时转速误差较大,故d 取125mm ;D 取250mm 。
(5) 确定各齿轮副齿数 ① 变速组a :变速组a 有三个传动副,传动比分别是11=a u ,41.1/12=a u ,2/13=a u由参考文献【1】表5-1查得:取60=Z S ,查表可得轴I 主动齿轮齿数分别为:30,25,20.则可以算出三个传动副齿轮齿数为40/201=a u ,35/252=a u ,30/303=a u② 速组b :变速组b 有两个传动副,同理可得第一扩大组的齿数和76=Z S ,查表可得轴Ⅱ主动齿轮齿数分别为20,38.可以算出传动副齿轮齿数为56/201=b u ,38/382=b u③ 速组c :变速组c 有两个传动副,可取90=Z S ,查表可得轴Ⅲ主动齿轮齿数分别为18,60.可以算出传动副齿轮齿数为72/181=c u ,30/602=c u4、绘制传动系统图主传动系统图5、核算主轴转速误差按各个转速实现所需的传动路线核算,过程及结果:ϕ%。
下表实际传动比所造成的主轴转速误差,要求不超过1.4-10=)1(为主轴转速误差与规定值之间的比较:主轴转速误差与规定值之间的比较三、动力设计1、 传动轴的直径的确定传动轴的直径可以按照扭转刚度进行初步计算:4][91ϕj n P d =式中 d ——传动轴直径 P ——该轴传递的功率jn ——该轴的计算转矩][ϕ——该轴每米长度允许扭转角,取值为1/m ︒(1) 各轴及齿轮计算转速:(2)各轴直径计算I 轴:I d 9124.9== mmII 轴:II d 9129.6==mmIII 轴:III d9138.5==mmⅣ轴: Ⅳd 9141.8==mm(3)主轴轴颈尺寸的确定根据参考文献【1】,主轴前轴轴颈取150D =mm ,后轴颈直径()210.70.853542.5D D mm == ,取242D =mm 。
2、 齿轮模数的初步计算 (1)齿轮计算转速的确定只需计算变速组内最小的也是强度最弱的齿轮即可。
a 变速组内最小齿轮齿数是z=20,只有一个转速710r/min ,取为计算转速b 变速组内最小齿轮齿数是z=20,125r/min 是III 轴的计算转速,所以该齿轮的计算转速为500r/min 。
c 变速组内的最小齿轮齿数是z=18,90r/min 是主轴的计算转速,所以该齿轮的计算转速为355r/min 。
(2)模数的计算要求每个变速组的模数相同。
齿轮材料初选45钢调质+表面淬火(硬度约45HRC ),按较高可靠度选择安全系数为1.25,得:lim1120[]8961.25H H HMPaMPaSσσ===同一变速组中的齿轮取同一模数,选择负荷最重的小齿轮,按简化的接触疲劳强度公式进行初算:其中:jm ——按接触疲劳强度计算的齿轮模数u ——大小齿轮的齿数比dN ——电动机功率kW ,7.5d N KW =j m =9 m φ——齿宽系数,取8=m φ1z ——小齿轮齿数][j σ——齿轮传动许用接触应力,取[]1120j MPa σ=j n ——计算齿轮计算转速(r/min )变速组a :16338 2.58a m mm == 变速组b :16338 3.15b m mm ==变速组c :16338 3.28c m mm == 故取3a m mm = 4b m m m = 4c m m m =3、选择带轮传动带型及根数根据前文所述已选择A 型带,皮带根数由下列公式确定:11()d L P z P P K K α=+∆ 式中z 皮带根数Pd 设计功率KW,7.5KWP1 单根V 带的基本额定功率,按GB/T 13575.1-992选择1.92KW 1P ∆ 传动比导致的额定功率补偿,按GB/T 13575.1-992选择0.134KWK α 小带轮包角导致的修正,由于中心距未定,无法计算小带轮包角,故忽略此项L K 皮带长度导致的修正,由于中心距未定,无法计算皮带长度,故忽略此项计算得z=3.65,取为4。
参考文献【1】 梁迎春等.机械制造装备设计.2版.哈尔滨:哈尔滨工业大学出版社,2005【2】 哈尔滨工业大学.机械制造装备设计大作业指导书.哈尔滨:哈尔滨工业大学出版社,2013【3】 宋宝玉,王黎钦.机械设计.北京:高等教育出版社,2010。