CCTL-单轴机械手臂
放射性物质远程操作装置 第5部分:剑式机械手-最新国标

放射性物质远程操作装置第5部分:剑式机械手1 范围本文件规定了远程操作剑式机械手的分类、运动学特性、选型等方面的内容。
本文件适用于电离辐射环境中的远程操作剑式机械手。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 12163 用于防护电离辐射的50 mm和100 mm厚墙的铅屏蔽构件GB 18871 电离辐射防护与辐射源安全标准GB/T XXXXX.1 放射性物质远程操作装置第1部分:通用要求GB/T XXXXX.2 放射性物质远程操作装置第2部分:机械式主从机械手EJ/T 1096 密封箱室密封性分级及其检验方法EJ/T 1175.1 密封箱室部件第1部分:手套接盘、封袋接盘、手套孔盖、封袋孔盖、密封环及可互换件EJ/T 1175.2 密封箱室部件第2部分:手套、焊封袋、剑式机械手护套及主从机械手护套ISO 9404-1 用于防护电离辐射的150 mm、200 mm和250 mm厚墙的铅屏蔽构件第1部分:150mm和200mm厚楔形构件(Enclosures for protection against ionizing radiation—Lead shielding units for 150 mmm, 200 mm and 250 mm thick walls—Part 1: Chevron units of 150 mm and 200 mm thickness)3 术语和定义GB/T XXXXX.1和GB/T XXXXX.2界定的术语和定义适用于本文件。
4 分类和运动学特性分类4.1.1 通则4.1.1.1 剑式机械手主要由末端执行器、管状直杆和手柄组成,直杆内传动元件实现末端执行器和手柄之间的机械连接。
剑式机械手一般安装在屏蔽墙或密封箱体上,也可安装在运载装置上或由操作人员直接手持。
c型臂知识
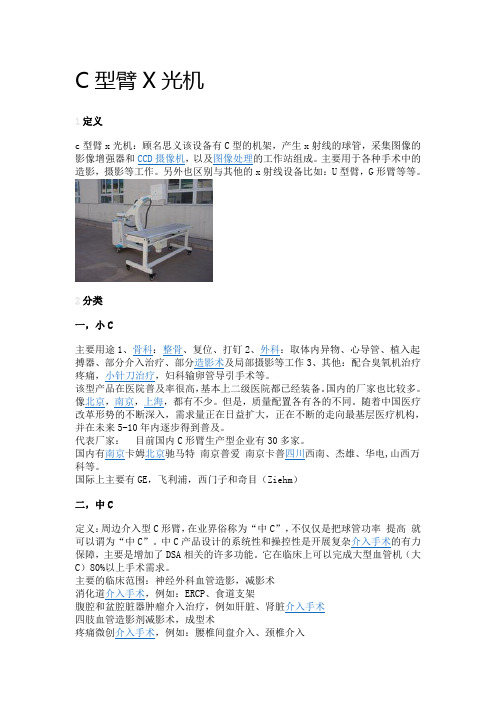
C型臂X光机1定义c型臂x光机:顾名思义该设备有C型的机架,产生x射线的球管,采集图像的影像增强器和CCD摄像机,以及图像处理的工作站组成。
主要用于各种手术中的造影,摄影等工作。
另外也区别与其他的x射线设备比如:U型臂,G形臂等等。
2分类一,小C主要用途1、骨科:整骨、复位、打钉2、外科:取体内异物、心导管、植入起搏器、部分介入治疗、部分造影术及局部摄影等工作3、其他:配合臭氧机治疗疼痛,小针刀治疗,妇科输卵管导引手术等。
该型产品在医院普及率很高,基本上二级医院都已经装备。
国内的厂家也比较多。
像北京,南京,上海,都有不少。
但是,质量配置各有各的不同。
随着中国医疗改革形势的不断深入,需求量正在日益扩大,正在不断的走向最基层医疗机构,并在未来5-10年内逐步得到普及。
代表厂家:目前国内C形臂生产型企业有30多家。
国内有南京卡姆北京驰马特南京普爱南京卡普四川西南、杰雄、华电,山西万科等。
国际上主要有GE,飞利浦,西门子和奇目(Ziehm)二,中C定义:周边介入型C形臂,在业界俗称为“中C”,不仅仅是把球管功率提高就可以谓为“中C”。
中C产品设计的系统性和操控性是开展复杂介入手术的有力保障,主要是增加了DSA相关的许多功能。
它在临床上可以完成大型血管机(大C)80%以上手术需求。
主要的临床范围:神经外科血管造影,减影术消化道介入手术,例如:ERCP、食道支架腹腔和盆腔脏器肿瘤介入治疗,例如肝脏、肾脏介入手术四肢血管造影剂减影术,成型术疼痛微创介入手术,例如:腰椎间盘介入、颈椎介入妇科输卵管再造手术、子宫肌瘤手术医院装备主要集中在一级的县医院。
符合国家卫生部提出的扩大基层医院规模,提升基层医院诊疗水平的号召。
国际上主要是:GE 西门子,飞利浦,奇目。
三,大CDSA是由电子计算机进行影像处理的先进的X线诊断技术,是继CT之后,在X 线诊断技术方面的又一重大突破,主要应用于全身血管疾病的诊断和治疗。
和小C 中C相比,大C都是固定式的,有固定在天花板的也有固定在地上的。
机械手臂的检测装置与检测方法[发明专利]
![机械手臂的检测装置与检测方法[发明专利]](https://img.taocdn.com/s3/m/e826cbad69eae009591bec10.png)
专利名称:机械手臂的检测装置与检测方法专利类型:发明专利
发明人:张光云,李伯良
申请号:CN201510039855.X
申请日:20150127
公开号:CN105983978A
公开日:
20161005
专利内容由知识产权出版社提供
摘要:本发明公开一种机械手臂的检测装置与检测方法。
上述机械手臂的检测装置包括:底座部;支架部,配置在上述底座部上;承载部,包括上承载板以及下承载板,且上述上承载板以及上述下承载板以彼此间隔一距离的方式配置在上述支架部上;以及至少一感测器,配置在上述承载部上,用以对待检测的机械手臂进行距离数据的收集。
申请人:力晶科技股份有限公司
地址:中国台湾新竹科学工业园区
国籍:TW
代理机构:北京市柳沈律师事务所
代理人:陈小雯
更多信息请下载全文后查看。
机器人机械手设计-气动机械臂设计
摘要本文简要介绍了工业机器人的概念,讲述了机械臂的分类与历史还有当今国内外的发展状况,机械臂硬件和软件的组成,即机械臂各个部件的整体尺寸设计与校核,气动技术的特点与优点,PLC控制的特点,PLC控制的气动机械臂系统的工作原理。
本文对机械臂进行总体的方案设计:1、确定了机械臂的坐标形式,自由度和机械臂的各项技术参数。
2、设计了机械臂的手臂结构,计算出了回转气缸的尺寸大小以及升降气缸的大小,并对手臂伸缩气缸进行了选型和校核。
3、设计了机械臂的夹持式手部结构和机械臂的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
4、设计出了机械臂的气动系统,绘制了机械臂气压系统工作原理图。
因为设计的机械臂为通用机械臂,分析了可编程控制器是如何来控制气动机械臂的运动与工作,可以利用可编程序控制器根据需要编写不同的程序对机械手进行控制,最终做出了机械臂运动的流程图。
关键词:气动;工业机器人;机械臂;PLC。
AbstractThis article briefly introduces the concept of industrial robots, telling the story of the classification of the mechanical arm and the historical and current development status at home and abroad, robot arm of hardware and software.The robot arm design and check the overall dimensions of the parts, the characteristics and advantages of pneumatic technology, PLC control, the characteristics of the working principle of PLC control system of pneumatic manipulator. In this article, the robot arm for the overall scheme design.1、Determining the coordinates of the mechanical arm forms,degrees of freedom, and the technical parameters of manipulator.2、Designing the manipulator arm structure, calculating the rotary cylinder size and the size of the lift cylinder, and the selection and checking of the telescopic cylinder and the arm .3、Designing holding type hand structure of mechanical arm and the robot arm's wrist structure.Calculating the driving moment of the wrist when needed and driving moment of the rotary cylinder.4、Designing the pneumatic system of mechanical arm and the map of mechanical arm pressure system working principle.5、Because the mechanical arm is designed for general mechanical arm, analysis of the programmable logic controller is how to control the pneumatic motor and mechanical arm.We can make use of the programmable controller according to the need to write a different program to control the manipulator, finally making the mechanical arm movement flow chart.Key words: Air pressure drive; Industrial robot; Robot arm; Programmable Logic Controller.目录摘要 (I)ABSTRACT (II)目录 (V)1 绪论 (1)1 .1 机械臂概论 (1)1.1.1 机械臂历史与发展 (1)1.1.2 机械臂的历史 (2)1.1.4 机械臂的组成 (2)1.1.4 机械臂的分类 (3)1.2 气动技术概述 (3)1.3 气动机械臂的设计要求 (4)2 机械臂整体设计方案 (5)2.1 机械臂的座标型式与自由度 (5)2.2 机械臂的手腕结构方案设计 (5)2.3 机械臂的手臂结构方案设计 (6)2.4 机械臂的手部结构方案设计 (6)2.5 机械臂的驱动方案设计 (6)2.6 机械臂的控制方案设计 (6)2.7 机械臂的主要技术参数 (6)3 手腕结构设计 (9)3.1 手腕的自由度 (9)3.2 手腕的驱动力矩的计算 (9)3.2.1 手腕转动时所需的驱动力矩 (9)3.2.2 回转气缸的驱动力矩计算 (11)3.2.3 手腕回转缸的尺寸及其校核 (12)4 手臂伸缩,升降,回转气缸的尺寸设计与校核 (15)4.1 手臂回转气缸的尺寸设计与校核 (15)4.1.1 尺寸设计 (15)4.1.2 尺寸校核 (15)4.2 手臂伸缩气缸的尺寸设计与校核 (16)4.2.1 手臂伸缩气缸的尺寸设计 (16)4.2.2 尺寸校核 (16)4.2.3 平衡装置 (16)4.2.4 导向装置 (16)4.3 手臂升降气缸的尺寸设计与校核 (17)4.3.1 尺寸设计 (17)4.3.2 尺寸校核 (17)5 手部结构设计 (18)5.1 夹持式手部结构 (18)5.1.1 手指的形状和分类 (18)5.1.2 设计时考虑的几个问题 (18)5.1.3 手部夹紧气缸的设计 (18)6 气动系统设计 (22)6.1 气动系统设计的主要内容及设计程序 (22)6.2 气压传动系统原理图 (22)7 机械臂的控制方式 (25)7.1 可编程序控制器的选择及工作过程 (25)7.1.1 可编程序控制器的选择 (25)7.1.2 可编程序控制器的工作过程 (25)7.2 可编程序控制器的使用步骤 (25)7.3 控制系统的工作原理 (26)7.4 控制要求 (26)7.4.1 手动工作方式 (26)7.4.2 单动工作方式 (26)7.4.3 自动工作方式 (27)7.5 气动机械手的工作流程 (27)8 结论 (29)8.1 结论 (29)8.2 不足之处及展望 (29)致谢 (30)参考文献 (31)气动机械臂设计1 绪论1 .1 机械臂概论1.1.1 机械臂历史与发展机械臂是近几十年发展起来的一种高科技自动化生产设备,它对稳定并且提高产品质量,提高生产效率,改善劳动条件与产品的快速更新换代起着十分重要的作用。
单臂机械手的PID控制器设计徐永绍

单臂机械手的PID控制器设计徐永绍发布时间:2021-09-23T02:00:31.342Z 来源:《中国科技人才》2021年第16期作者:徐永绍[导读] 单臂机械手是一种被广泛应用于各个领域中的机器人系统,它主要的目的是可以代替人类去完成一些人类无法承受或者是重复性较大且较为枯燥的一些工作。
中核检修有限公司深圳分公司深圳 518000摘要单臂机械手是一种被广泛应用于各个领域中的机器人系统,它主要的目的是可以代替人类去完成一些人类无法承受或者是重复性较大且较为枯燥的一些工作。
一个机器人系统是实际上是极其复杂的,被控对象在运动的过程中会遇到内部或者外部的干扰,干扰会对被控对象产生影响,进而使得实际的运动轨迹偏离预设轨道,最终导致无法完成任务。
因此研究不同情况下机械手的性能以及不同种类的控制算法是必不可少的。
本论文研究的对象是机械结构为一自由度的单臂机械手,简述机械手的概念和适用于机械手的控制方法,然后又对机械手进行了运动学以及动力学的分析,并对机械手进行了数学建模得到了它的运动学方程以及动力学方程。
设定两种单臂机械手情况,即确定性以及不确定性,学习PID控制以及前馈控制算法,综合了两中算法中的优点相互结合构成了PD前馈控制器,熟练掌握MATLAB仿真软件,通过编程、仿真得到图像,又对控制算法进行了优化,在原来的算法中添加了鲁棒控制,证明了PD前馈鲁棒控制可以解决存在不确定因素的单臂机械手。
关键词:PID控制;PD前馈控制器;PD前馈鲁棒控制器0 引言机械手是一个多输入多输出、高度非线性、强耦合的复杂系统错误!未找到引用源。
,也可以将其视为一种在机械化、自动化生产过程中根据计算和规划关节的工作轨迹来实现抓取和移动工件等功能的自动化装置。
机械手是经常被应用于在工业领域中,通常被认定为一种工业机器人。
机械手系统可以被分为3个部分,即机械部分、传感部分和控制部分错误!未找到引用源。
按照机械角度来看,机械手可以看作是一系列刚性连杆串联或并联的集合,在连杆之间会借助旋转关节和/或棱柱关节进行连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东莞市泰莱(中国)自动化科技有限公司(注册商 标:CCTL)隶属于台资企业大陆分支机构。是一家专 业从事机械自动化配件组装以及提供相关专业技术支持 的现代化企业。公司主要经营:单轴机械手臂。 泰莱本着“源自台湾,传动世界”的企业宗旨。基 于当下国内高新自动化配件进出口成本高昂及交期较长 的大前提,并且结合国内客户的实际需求,及时为用户 提供相关耗材的补给,决定于大陆设厂组装自动化重要 配件--单轴机械手臂。
Page 19
2、对比:精度、速度、负载、稳定度
Page 20
3、滑台的特性具有:高效(N段定位,N段速度定位)、 高速;高精度;噪音小;单轴与多轴使用;稳定性高。
Page 21
4、滑台主要组成部件:本体 丝杆 导轨 轴承 支承座 联 轴器 限位开关 电机(步进、伺服、混合动力伺服电机)
第三课时:滑台在各行业的应用范例及 同行对比。
六、滑台与丝杆、导轨所涉及的自动化设备
非标自动化:自动锁螺丝机 吹瓶机 送/上板机 自动包装机 补贴机 插件机 测试分选机 自动化检测 FPC专业测试 拉 力测试仪 晶振整脚机 自动碰焊机 直线测试仪 寿命测试设 备(LED测试机 倒车雷达测试机 手机按键测试机 跌落测 试机 键盘PCB测试机) X-Ray检测设备 LED分光机 学生 实验设备 加工中心 自动焊接网片专用机 卫浴焊锡机器人 鼓式制动器 纸盒机 电表穿线机 接线端子制造商 汽车的 冲压、焊接、涂装、总装;
Page 3
2、在全社会提倡建立低能耗、低污染的绿色低碳经 济背景下,如何在制造业中利用先进的自动化技 术降低能源消耗的命题,也是自动化转型所必须 要思考的问题。低碳经济是世界发展的趋势,是 国家提倡的重点,也是企业转型的亮点。 应用服务的外包可以使企业将更多的资金投 入到新产品的研发方面,而定制服务则使服务方 与被服务方获得了规模优势与技术优势,客观上 抑制了彼此的重复生产。而在硬件产品需求难增 的情况下,生产性服务则成为我国当前自动化产 业发展现代服务业必然的选择。
Page 16
作业: 列举一下关于自动化的发展的事例?
找寻一些自动化生产的设备类型?
总结回顾本次自动化发展的了解? CCTL品牌的认知和优势。
Page 17
第二课时:CCTL模组产品知识、型号以及相 关计算、产品资料应用。
四、产品知识
1、名称:单轴机械手臂、机器人、线性模组、精密滑台、 定动滑台、电动缸、伺服定位滑台。 滑台的由来:滑台的发展情况:油压→气压→电机(伺服、 步进、混合伺服)→线性马达(控制不稳定,目前只有大 银—以色列,CPC—德国控制)
激光设备:激光切割 雕刻机 打标机;
Page 36
喷涂设备:往复机 涂装机 丝印机 移印机 网印机; (欧 规滑台) 医疗设备:病床 制药、配药设备; 玻璃机械:玻璃面板雕刻机 亚克力面板雕刻机 玻璃开料 机;
Page 37
潜力市场(待深入开发):全自动高精密CNC数控外园 磨床、全自动高精密内翅片机、全自动定长微型铣刀磨尖 机倒角机、全自动微型铣刀磨槽机、全自动微型钻头检测 机、片材机、切片机、制杯机、封口机、上料机、ICT集 成(多机)自动测试线、母板全自动测试线、母板全自动 铆接机、标准通信机柜包装生产线、全自动合页扣装配机、 全自动气门芯装配机、全自动氧毛罩装配机、全自动插接 件组装机、全自动帖标机、全自动帖膜机、全自动电容成 型剪切机、旋转恒温热压啤机、旋转脉冲热压啤机、计算 器成品机全自动测试机、自动日期啤机、自动化生产线的 设计和生产及现场调试等(如电镀生产线、装配生产线、 (化纤,橡胶,食品行业,电子)生产线和铸造生产线)、 工程自控项目的设计
型號 導程 有效行程 馬達方向 馬達品牌及功率
+ B
刹車
马达方向 M 马达内置 BD 马达直接安装 BC 马达外置 BL 马达外置左侧 BR 马达外置右侧 BM 马达外置下方
马达品牌及功率 S 三洋 Sanyo M 三菱 Mitsubishi Y 安川 Yaskawa P 松下 Panasonic F 富士 Fuji T 台达 Delta
/invest/2012/02/07202612189977.s html
Page 6
Page 7
Page 8
Page 9
Page 10
Page 11
二、公司简介
东莞市泰莱(中国)自动化科技有限公司
ROBOTICS
Dong Guan CCTL(China)Automation Technology Co.,Ltd
Page 13
无论是单轴还是多轴组合的单轴机械手臂,均以最优秀的产 品性能赢得客户的一致好评,在众多全球知名品牌中处于佼 佼者地位。具有明显优势的产品价格,又能帮助客户减轻设 备投入成本压力。还有,降低下游制造商库存风险及资金的 积压,并提供整合性的技术服务,节省客户产品研发的时间 与成本,提供最佳的自动化机电工程、机构、系统与技术之 咨询、设计、试车到售后的整体性服务。 除了致力于营业成长之外,亦将持续不断地提升技术研发与 设计能力,积极培训专业技术人才,开发新产品线,拓展海 外市场,提供更快速整体解决方案之产品与技术服务,以追 求最高质量为公司营运之最高目标。
联轴器 :1PCS
限位开关:台湾嘉准光电开关3PCS(限位开关)
电机(步进、伺服、混合动力伺服电机)最高转速分别是:500600r/min、3000-4500r/min、1200-1500r/min以上
Page 24
五、CCTL单轴机械手臂的型号及参数
TL100 - L10 - S400 - M - M 100W
Page 35
贴膜设备:COG COF TAB US-GGL ACF FPC邦定 TP贴片设备 邦定设备 热压机 预压机 本压机 贴附机 背光 源贴膜机(背光全自动组装机) 贴标机偏光片贴片机 液 晶模组 TP贴合机 OCA贴合机; 电路板加工:晶体自动套片机 剪脚机 打扁机 编带机 电容 切脚机 PCB板分板机;(国产导轨、丝杆) 全自动点焊系列:点胶机 点焊机 焊接机 焊锡机器人 自动 碰焊机;
电机外置BL L=有效行程+373mm
滑台最快速度的计算: 伺服马达:Vmax=3000 rev/min→50 rev/s
滑台的丝杆的导程=10mm
则:滑台Vmax=50*10=500mm/S
Page 30
CCTL单轴机械手臂选型需要那些参数? A.组合方式 B.安装方式(使用环境) C.负载 D.速度 E.有效行 程. 组合情况以及相关的负载计算选型分析: 十字滑台、三轴悬臂式、龙门式。 1、三轴悬臂式:X-Y-Z A.负载:Z轴负载(客户提供) X轴负载=Z轴负载+Z轴自重+电机重量 Y轴负载=X轴负载+X轴自重+电机重量 2、龙门式:X-Y1-Y2-Z Z、X轴负载同三轴悬臂式一样分析方法 Y轴负载=X轴负载+X轴自重+电机重量=Y1+Y2 Page 31
Page 25
索引Series List General
螺杆系列Ball-Screw Series--一般環境
Page 26
电机安装方式
Page 27
单轴机械手具体参数
Page 28
单轴机械手臂具体安装尺寸
Page 29
模组相关计算:
丝杆细长比=D/L值大于等于1:80 滑台的总长:TL100 电机内置M L=有效行程+385mm
Page 12
我们的信心保证是:引进台湾整套优质机械手臂零配件, 结合日本日系原装机械手组装设备及工艺要求,造台湾 最具性价比单轴机械手臂并且为客户提供整套完善的售 前售后服务。
CCTL单轴机械手臂,主要应用在自动化设备的精确定位、高速 高精度重复搬运、点胶、焊接、装配、检测、封装、打磨、贴片、 打标、堆码、锁紧、喷涂等方面。 为了满足客户的设计需求,我们均可根据客户的需求,分别 配合客户组搭:伺服线性模块、十字定位滑台、三轴悬臂式、龙 门式工作台等客制化生产,以达到人性化产品的技术配合。
Page 22
Page 23
本体:一体挤拉成型的铝型材 丝杆 :台湾原装TBI滚珠丝杆(全球传动科技) 导轨 :日本THK/上银(HIWIN),全球导轨三大品牌之一 同步带:意大利意拉泰(ELATECH) 轴承:日本原装NSK轴承
支承座 :台湾原装TJK支撑座(内含一套“三角形背对背结构” 轴承)
Page 4
3、自动化发展的前景: >流程工业自动化>
流程工业是指在我国国民经济中占有重要经济地位的石化、 炼油、化工、冶金、制药、建材、轻工、造纸、采矿、环保、电 力等工业行业。流程工业综合自动化系统是将先进的工艺装备技 术、现代管理技术和以先进控制与优化技术为代表的信息技术相 结合,将企业的生产过程控制、优化、运行、计划与管理作为一 个整体进行控制与管理,提供整体解决方案,以实现企业的优化 运行、优化控制与优化管理,从而成为提高企业竞争力的核心高 技术。
速度:要求客户提供各轴的速度要求。单纯知道设备具体 使用速度不完全。因为涉及到各轴是否同步等控制上的差 异。 有效行程:各轴的有效行程。
Page 32
作业
懂得对照资料,熟悉单轴机械手臂具体参数。 能熟记CCTL模组组成配件的名称和品牌。
熟练协助客户选型以及相关计算方式。
Page 33
竞争理念:力求寻找高于对手的差异化,造最具信价比的滑台
Page 15
三、選擇CCTL的五大理由:
1.臺灣整套優質機械手臂零配件+日本日系原裝機械手 組裝設備及工藝要求+國內設廠組裝=臺灣最具性價比 的單軸機械手臂; 2.更短的交期,不但降低下游製造商庫存風險及資金的 積壓,並提供整合性的技術服務,而且還節省客戶產品 研發的時間與成本; 3.有多種產品的結構並兼有高速、高精度分段定位的卓 越性能,及運行速度、定位精度、動作範圍和負荷有關 的耐久性強可應用於多種領域; 4.重複定位精度是±0.02mm(可選擇±0.01mm)。高精 度,易維護; 5.專業的“機械手”工程銷售隊伍能給用戶提供快捷、 完善的售前售後服務。