London SW7 2BZ
SOLIDWORKS 平板钢制工程指南说明书
SOLIDWORKS Sheet MetalDassault Systèmes SolidWorks Corporation175 Wyman StreetWaltham, Massachusetts 02451 USA© 1995-2022, Dassault Systemes SolidWorks Corporation, a Dassault Systèmes SE company, 175 Wyman Street, Waltham, Mass. 02451 USA. All Rights Reserved.The information and the software discussed in this document are subject to change without notice and are not commitments by Dassault Systemes SolidWorks Corporation (DS SolidWorks).No material may be reproduced or transmitted in any form or by any means, electronically or manually, for any purpose without the express written permission of DS SolidWorks.The software discussed in this document is furnished under a license and may be used or copied only in accordance with the terms of the license. All warranties given by DS SolidWorks as to the software and documentation are set forth in the license agreement, and nothing stated in, or implied by, this document or its contents shall be considered or deemed a modification or amendment of any terms, including warranties, in the license agreement.For a full list of the patents, trademarks, and third-party software contained in this release, please go to the Legal Notices in the SOLIDWORKS documentation.Restricted RightsThis clause applies to all acquisitions of Dassault Systèmes Offerings by or for the United States federal government, or by any prime contractor or subcontractor (at any tier) under any contract, grant, cooperative agreement or other activity with the federal government. The software, documentation and any other technical data provided hereunder is commercial in nature and developed solely at private expense. The Software is delivered as "Commercial Computer Software" as defined in DFARS 252.227-7014 (June 1995) or as a "Commercial Item" as defined in FAR 2.101(a) and as such is provided with only such rights as are provided in Dassault Systèmes standard commercial end user license agreement. Technical data is provided with limited rights only as provided in DFAR 252.227-7015 (Nov. 1995) or FAR 52.227-14 (June 1987), whichever is applicable. The terms and conditions of the Dassault Systèmes standard commercial end user license agreement shall pertain to the United States government's use and disclosure of this software, and shall supersede any conflicting contractual terms and conditions. If the DS standard commercial license fails to meet the United States government's needs or is inconsistent in any respect with United States Federal law, the United States government agrees to return this software, unused, to DS. The following additional statement applies only to acquisitions governed by DFARS Subpart 227.4 (October 1988): "Restricted Rights - use, duplication and disclosure by the Government is subject to restrictions as set forth in subparagraph (c)(l)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252-227-7013 (Oct. 1988)."In the event that you receive a request from any agency of the U.S. Government to provide Software with rights beyond those set forth above, you will notify DS SolidWorks of the scope of the request and DS SolidWorks will have five (5) business days to, in its sole discretion, accept or reject such request. Contractor/ Manufacturer: Dassault Systemes SolidWorks Corporation, 175 Wyman Street, Waltham, Massachusetts 02451 USA.Document Number: PMT2306-ENGContents IntroductionAbout This Course . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Prerequisites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Using this Book . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2About the Training Files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Training Templates. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Accessing Training Templates in SOLIDWORKS . . . . . . . . . . . . 3Conventions Used in this Book . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Windows OS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Use of Color . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5More SOLIDWORKS Training Resources. . . . . . . . . . . . . . . . . . . . . . 5Local User Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Lesson 1:Basic Flange FeaturesWhat are Sheet Metal Parts?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Sheet Metal Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Unique Sheet Metal Items. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Flange Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Base Flange/Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Sheet Metal Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Sheet Metal Thickness and Bend Radius . . . . . . . . . . . . . . . . . . . . . . 14Bend Allowance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15K-Factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Bend Allowance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Bend Deduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Specifying the Bend Allowance. . . . . . . . . . . . . . . . . . . . . . . . . . 17iContents SOLIDWORKSii Auto Relief . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Editing Sheet Metal Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Sheet Metal Bend Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 Flat-Pattern Feature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 Flatten and Exit Flatten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 Toggle Flat Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 Additional Flange Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Edge Flanges. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Edge Flange Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 Editing the Flange Profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 Flange Profile Relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 Edge Flanges on Curved Edges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 Miter Flanges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 Miter Flange Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 Hem Feature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 Hem Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 Tab Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 Cuts in Sheet Metal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 Summary of Flange Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 Exercise 1: Sheet Metal Bracket. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 Exercise 2: Flange Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 Exercise 3: Edit Flange Profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 Exercise 4: Sheet Metal Box. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 Exercise 5: Assorted Framing Hangers . . . . . . . . . . . . . . . . . . . . . . . 57Lesson 2:Working with the Flat PatternWorking with the Flat Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Flat Pattern Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Features for Manufacture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Corner-Trim Feature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Corner-Trim Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Corners in the Formed State. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Closed Corner. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Closed Corner Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Corner Relief. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Break Corner/Corner Trim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Producing the Flat Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Sheet Metal Cut List Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Accessing Cut List Properties. . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Sheet Metal Drawings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78Flat Pattern Drawing Views . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78Flat Pattern View Properties. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Cut List Properties as a Note . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82Exporting the Flat Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83Exercise 6: Flat Pattern Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Exercise 7: Working with Corners . . . . . . . . . . . . . . . . . . . . . . . . . . . 91SOLIDWORKS Contents Lesson 3:Standardizing Sheet Metal DesignsStandardizing Gauge Numbers and Bend Radii. . . . . . . . . . . . . . . . 100Standardizing Bend Allowance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Topics for Standardizing Parameters . . . . . . . . . . . . . . . . . . . . . . . . 100Using Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Gauge Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Bend Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102Bend Allowance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106Editing the Gauge Table Selection. . . . . . . . . . . . . . . . . . . . . . . 107Gauge Table Training Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107Defining Table File Locations . . . . . . . . . . . . . . . . . . . . . . . . . . 107Custom Sheet Metal Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111Sheet Metal Templates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115Sheet Metal Part Document Properties. . . . . . . . . . . . . . . . . . . . 117Other Part Template Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . 119Sensors for Sheet Metal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119Sheet Metal Drawing Document Properties. . . . . . . . . . . . . . . . 125Sheet Metal Tables in Drawings. . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Adding a Cut List Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Adding a Bend Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132Mapping DXF Output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Options for Map File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137Exercise 8: Standardizing Sheet Metal Designs. . . . . . . . . . . . . . . . 140 Lesson 4:Additional Sheet Metal TechniquesAdditional Sheet Metal Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . 142Designing from the Flat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142Sketched Bend Feature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142Jog Feature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147Adding Features in an Unfolded State . . . . . . . . . . . . . . . . . . . . . . . 150Unfold and Fold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150Creating Cuts in the Flat Pattern. . . . . . . . . . . . . . . . . . . . . . . . . 153Swept Flange. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153Swept Flange Flat Pattern Options. . . . . . . . . . . . . . . . . . . . . . . . . . 155Lofted Bends. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Bent Lofted Bends . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Bent Bend Region Options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158Formed Lofted Bends. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161Formed Bend Region Options . . . . . . . . . . . . . . . . . . . . . . . . . . 163Lofted Bends in the Design Library. . . . . . . . . . . . . . . . . . . . . . . . . 165Exercise 9: Sheet Metal from Flat . . . . . . . . . . . . . . . . . . . . . . . . . . 166Exercise 10: Jogs and Hems. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169Exercise 11: Fold & Unfold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176iiiContents SOLIDWORKSiv Exercise 12: Conical Swept Flange . . . . . . . . . . . . . . . . . . . . . . . . . 179 Exercise 13: Lofted Bends . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181 Exercise 14: Using Symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184 Manual Relief Cut. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184 Sheet Metal Library Features . . . . . . . . . . . . . . . . . . . . . . . . . . . 190Lesson 5:Converting to Sheet MetalSheet Metal Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194Insert Bends Method. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194Adding Rips . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195Insert Bends . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196Associated Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198Switching Between States. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199Making Changes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199Welded Corner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203Converting Cones and Cylinders . . . . . . . . . . . . . . . . . . . . . . . . . . . 205Convert to Sheet Metal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210Convert to Sheet Metal Settings. . . . . . . . . . . . . . . . . . . . . . . . . 212Using Rip Sketches. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216Exercise 15: Working with Imported Geometry. . . . . . . . . . . . . . . . 218Exercise 16: Unrolling a Cylinder . . . . . . . . . . . . . . . . . . . . . . . . . . 220Exercise 17: Convert to Sheet Metal Practice . . . . . . . . . . . . . . . . . 225Exercise 18: Convert with Rips . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226Exercise 19: Sheet Metal Hopper. . . . . . . . . . . . . . . . . . . . . . . . . . . 228 Lesson 6:Multibody Sheet Metal PartsMultibody Sheet Metal Parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234Tools to Create Multibody Sheet Metal Parts. . . . . . . . . . . . . . . 235Multibodies with Base Flange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235Sheet Metal Parameters for Multibodies . . . . . . . . . . . . . . . . . . . . . 238Solid Body Feature History . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238Cut List Item Properties for Multibodies . . . . . . . . . . . . . . . . . . . . . 239Flat Pattern Drawing Views for Multibodies . . . . . . . . . . . . . . . . . . 240Cut List Balloon Annotations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244Exporting to DXF/DWGs with Multibodies. . . . . . . . . . . . . . . . . . . 247Convert with Multibodies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248Hiding and Showing Bodies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250Hide and Show . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250Hide/Show Bodies Command. . . . . . . . . . . . . . . . . . . . . . . . . . . 250Isolate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250The Display Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251Sensors for Multibody Parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . 253SOLIDWORKS ContentsUsing Split with Sheet Metal Parts. . . . . . . . . . . . . . . . . . . . . . . . . . 255Patterning for Multibodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257Using Edge Flanges to Merge Bodies. . . . . . . . . . . . . . . . . . . . . . . . 260Interfering Bodies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261Combining Sheet Metal with Other Bodies . . . . . . . . . . . . . . . . . . . 263Assigning Materials to Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . 264Exercise 20: Toolbox . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266Exercise 21: Mirroring and Merging Bodies . . . . . . . . . . . . . . . . . . 280Exercise 22: Sheet Metal Trailer . . . . . . . . . . . . . . . . . . . . . . . . . . . 285 Lesson 7:Forming Tools and GussetsSheet Metal Forming Tools. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300How They Work. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300Forming Tools in the Design Library . . . . . . . . . . . . . . . . . . . . . . . . 301The Forming Tools Folder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301Using an Existing Forming Tool . . . . . . . . . . . . . . . . . . . . . . . . 303Form Tool Feature Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304Form Tool Features in the Flat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306Part Document Properties. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306Custom Forming Tools. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308Split Line. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309Forming Tool Feature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310Legacy Behavior for Forming Tools. . . . . . . . . . . . . . . . . . . . . . . . . 314Form Tools in Drawings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314Punch Tables and Punch ID . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314Sheet Metal Gusset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317Exercise 23: Customizing a Forming Tool. . . . . . . . . . . . . . . . . . . . 320Exercise 24: Sheet Metal Gusset . . . . . . . . . . . . . . . . . . . . . . . . . . . 329 Lesson 8:Additional Sheet Metal FunctionsAdditional Sheet Metal Functions . . . . . . . . . . . . . . . . . . . . . . . . . . 332Cross-Breaks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332Cross Break Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333Cross Breaks in Drawings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334Vent Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336Fill Pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338Mirror Part . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340Tab and Slot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343Process Plans. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348Exercise 25: Vent Cover. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352vContents SOLIDWORKS Appendix A:Sheet Metal TablesTables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358The Sample Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358Templates and Other Tables. . . . . . . . . . . . . . . . . . . . . . . . . . . . 358Customizing Tables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359K-Factor Ratio Tables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360 vi。
英语:module 5《museums》教案(1)(外研版九年级上).doc

英语:Module 5《Museums》教案(1)(外研版九年级上)Teaching Procedures:Step one: Talking : the signs around youStep two: Listening and vocabulary1. Match the words in Column 1 with the word in Column 22. Listen and underline the correct word in each sentenceas well , familiar , look forward to, on on e’s own, report, pay attention to3. Listen and read4. Make notes about what people cannot do in the museumNo shouting No entry Don’t touch No photograph5. Read the passage again and choose the best answer6. Complete the sentences with the correct form of the words and phrases in the boxagainst the rules come back downstairs real hurry up pay attention to sigh upstairs7. Pronunciation and speaking1. No shouting! It’s against the rules.2. Don’t touch! You mustn’t touch it.3. No, you can’t take a photo, either. Look at the sign—”No photograph”.8. Tell your parents about the rules for museums or librariesIn a library, you should be quiet.-- No shouting in the library.1.You aren’t allowed to go into that room.2.You can’t take food and drink into the library.3.You can’t use your camera in the museum.4.In a museum, you shouldn’t put your hands on the paintings.HomeworkWrite a passage about a museum you have ever been toSay something that you can and can’t do in the museumWrite down some differences between the museum you have even been to and other museums you have ever knownRead your passage in classTeaching Procedures:Step I: Revision There are many sorts of museumsReading and vocabulary1. Talk about the differences in the two museumsboring exhibit, not allowed to, quiet serious, busy usual fun interesting noisydo experiments2. Read the passage and answer the questionsThe science museum in London1. In what way is the Science Museum different from other museums?2. Where does Tony go when he visits the Science Museum?3. What else is there to see in the Science Museum?plete the table4. Read the passage again and decide what the underlined words refer to1.People talk ab out what they can see and do there…2.…it’s a great way to learn about science…3.…but you can buy postcards of them in the museum shops.5. Answer the questionsas…as drop in fill free physics position sand truck try out wheel1.What kind of physics experiments can you do at the Launch Pat?2.What can you try out in the Human and Nature room?3.How much does it cost to go in the Science Museum?4.For how long can you drop in at the Science Museum?6. Complete the passage with it, they, that and there itThere are a lot of museum in London,and one of the most popular is the British Museum. Thousands of peoplevisit(1) every year.(2) can see lots of interesting things from different times and places.The British Museum is very serious, so(3) is quite(4) . People mustn’t make a noise,and (5) mustn’t touch the exhibits. Photography is not allowed in the British Museum,so it’s a good idea to visit the museum shop and buy postcards. Entry to the museum is free,so you canReading More The library of London Science MuseumThe Science Museum library was founded in 1883 as the Science Library of the South Kensington Museum (which also had Art andEducation Libraries), and had grown into an important national science library by the 1930s. More recently we have specialised in the history of science and technology, in our key role as part of the National Museum of Science & Industry. The Science Museum Library is primarily a research library for the history and public understanding of the physical sciences and all branches of engineering.We welcome academics and students, curators, collectors and dealers, enthusiasts, private researchers and the general public to use the libraryfor reference. We can provide advice and guidance for your research, and help in using our collections, and will answer enquiries requiring up to 15 minutes research.Exhibition Road, South Kensington, London SW7 2DD.Switchboard: 0870 870 4868Open 10am –6pm every day except 24 to 26 December.Entry is free, but charges apply for the IMAX 3D Cinema, simulators and some special exhibitions.7. Write a passage about your favourite museum•Say if there are many museums in your town.There are only two museums in my town…•Say which one is your favourite.My favourite museum is…•Say what’s special or unusual.It’s special because…•Say what you can see and do there.You can see…HomeworkFinish the workbook exercisesWrite a passage about your favourite museumPart I: Revisionnguage practiceNo shouting!Don’t touch!You mustn’t get up there.You can’t take a photo.You aren’t allowed to touch the exhibits.More SignsNo shouting! 禁止喧哗Hang on a minute! You mustn’t go up there!等一下!你们不允许上楼去!Don’t touch! You mustn’t touch it.别碰!你们能碰它。
【最新】英国伦敦旅游必去十大景点-精选word文档 (4页)

本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==英国伦敦旅游必去十大景点伦敦是英国的政治、经济、文化、金融中心和世界著名的旅游胜地,下面为大家带来:英国伦敦旅游必去十大景点盘点,想知道有哪些景点吗?那就一起来了解下吧。
英国伦敦旅游必去十大景点1. 大英博物馆大英博物馆British Museum成立于1753年,1759年1月15日起正式对公众开放,是世界上历史最悠久、规模最宏伟的综合性博物馆,也是世界上规模最大、最著名的博物馆之一,与巴黎卢浮宫和纽约大都会艺术博物馆同列为世界三大博物馆。
其中以埃及文物馆、希腊罗马文物馆和东方艺术文物馆藏品最引人注目,所收藏的古罗马遗迹、古希腊雕像和埃及木乃伊闻名于世,33号展厅是专门陈列中国文物的永久性展厅。
地址:Great Russell Street, London WC1B 3DG门票:免费对大众开放,讲解器5镑,部分临时专题展收费附近地铁站:Russell Square, Holborn, Tottenham Court Road2. 国家美术馆位于特拉法加广场北侧的国家美术馆National Gallery成立于1824年,散发着浓郁气息的典雅美术殿堂堪称汇集了文艺复兴的经典名作的欧洲艺术宝库,作品时间跨度大约从1250年到1900年,收藏有梵高、米开朗基罗、达芬奇等大家的画作。
免费对大众开放。
地址:Trafalgar Square, London WC2N 5DN门票:免费对大众开放,讲解器2镑,部分临时专题展收费附近地铁站:Charing Cross, Leicester Square3. 自然历史博物馆自然历史博物馆Natural History Museum展出有关地球和生物进化史的近七千万件展品,囊括从达尔文研究进化论时收集的样品到侏罗纪时代的恐龙化石。
【树人】2016-2017学年第二学期初二英语第一次月考试卷
A state-of-art exhibition exploring London’s famous
The world’s largest exhibition devoted to Shakespeare.
landmark. Discover how and why the bridge was built.
Mike felt quite ___12___, but he told her it was a sparrow and got back into ___13___.
登陆官网获取更多资料及课程信息:
南京中小学辅导 1对1、3人班、8人班
SCIENCE MUSEUM
ZSL LONDON ZOO
IMAX CINEMA
Regent’s Park, London NW8 8QN
Exhibition Road, London SW7 2DD
T: 020-7722-3333
登陆官网获取更多资料及课程信息:
南京中小学辅导 1对1、3人班、8人班
see 2-D and 3-D films.
London Zoo.
Open: Mon.--- Sun.; 10 am--- 5 pm. CALL for film time. Open: Mon.--- Sun.; 10 am--- 4:30 pm
Adult £7.5, Child £6
Adult £14.5, Child £11.5, Senior and students £13
Mike began to read it.
“Today, I was watering the flowers in the garden when little Mike pointed to a ___17___ on the grass and asked
伦敦邮政编码
教你看懂伦敦的邮政编码伦敦的邮政编码有两部分,第一部分以字母开头,根据在伦敦的方位而定;后面的数字根据区域名称而定。
伦敦邮政编码第二部分由一个数字和两个字母组成,根据具体街道名称而定。
只要知道伦敦邮政编码,就可以在某些地图网站上搜到和打印出非常详细的伦敦景点周边地图。
在伦敦旅行时看到建筑物上的伦敦邮政编码,也能大致判断自己所在的位置。
W打头的伦敦邮政编码代表West LondonWC打头的伦敦邮政编码代表West Central LondonSW打头的伦敦邮政编码代表South West LondonSE打头的伦敦邮政编码代表South East LondonNW打头的伦敦邮政编码代表North West LondonN打头的伦敦邮政编码代表North LondonE打头的伦敦邮政编码代表East LondonEC打头的伦敦邮政编码代表East Central London,也就是伦敦金融城如果你想写信给住在贝克街上的福尔摩斯,福尔摩斯家的伦敦邮政编码是NW1 6XE,其中的NW1就表示福尔摩斯住在伦敦西北部。
伦敦邮政编码与伦敦旅游区域对应表West LondonW1 涵盖West End,包括Mayfair, Soho 和south MaryleboneW2 涵盖the Paddington, Bayswater, 海德公园区域W8 Kensington (肯辛顿中心区域)W11 诺丁山, Holland ParkW14 West KensingtonWest Central LondonWC1 涵盖the Bloomsbury & Gray's Inn areaWC2 涵盖the Holborn / Strand / Covent Garden areaSouth West LondonSW1 涵盖the Westminster, Belgravia, Pimlico area;大本钟就在这里SW2 Brixton (central and southern Brixton, Streatham Hill)SW3 Chelsea, BromptonSW4 ClaphamSW5 Earl's CourtSW6 Fulham, Parson's GreenSW7 South KensingtonSW8 South Lambeth (包括Vauxhall, Nine Elms)SW9 Stockwell (包括 northern Brixton)SW11 Battersea, Clapham JunctionSW19 温布尔顿 (包括Merton (Town) and Collier's Wood)South East LondonSE1 涵盖the Waterloo, Bermondsey, Southwark (South Bank & The Borough) & north Lambeth area;007的伦敦军情六处总部就在这里SE2 Abbey Wood (包括Thamesmead South)SE10 Greenwich (Town)SE17 Walworth, Elephant & Castle;Clarks其乐工厂店就在这里North West LondonNW1 涵盖the Camden Town, Regent's Park, north Marylebone areaNW2 Cricklewood, Neasden (包括Dollis Hill)North LondonN1 涵盖Islington, Barnsbury, Canonbury areaN2 East Finchley (包括Hampstead Garden 东郊)N3 Finchley Central, Finchley Church End (central Finchley)N4 Finsbury Park, Manor HouseN6 HighgateN7 Holloway (包括Lower Holloway)N22 Wood Green, Alexandra PalaceEast London2012伦敦奥运会举办地E1 Whitechapel, Stepney, Mile EndE2 Bethnal Green, ShoreditchE3 Bow, Bromley-by-BowE8 Hackney, DalstonE9 Hackney, Homerton (包括South Hackney) Burberry巴宝莉伦敦工厂店在这里E14 Poplar, Millwall (包括Isle of Dogs)E15 Stratford, West HamEast Central LondonEC1 Clerkenwell, Finsbury, Barbican areaEC2 金融城东北区域 (Moorgate, Liverpool Street)EC3 金融城东南区域(Monument, Aldgate, Fenchurch St, Tower Hill)EC4 金融城西部区域 (Fleet Street, Temple, Blackfriars, St Paul's)。
Optimal

We now calculate the maximum Lmax(o) and minimum Lmin(o) latency of each operation o ∈ O according to eqns. 7 and 8.
Each operation o ∈ O, executing on resource type r ∈ R(o), can start its execution during any time step in the set T(o, r) (eqn. 9), where Z+ denotes the set of non-negative integers. To define this, we utilise modi-
POLICY
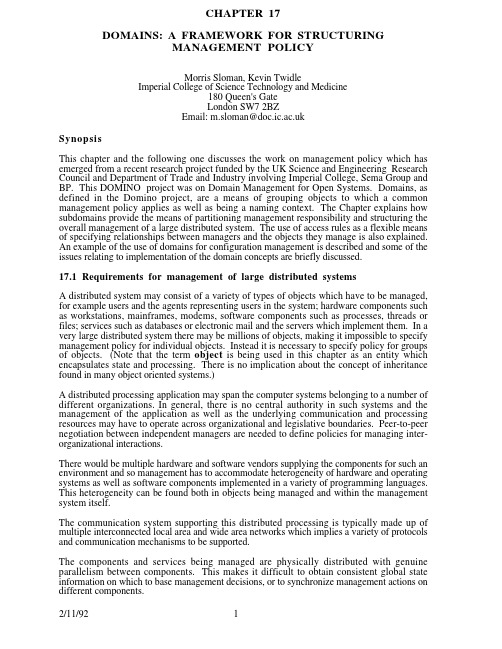
CHAPTER 17DOMAINS: A FRAMEWORK FOR STRUCTURINGMANAGEMENT POLICYMorris Sloman, Kevin TwidleImperial College of Science Technology and Medicine180 Queen's GateLondon SW7 2BZEmail: m.sloman@SynopsisThis chapter and the following one discusses the work on management policy which has emerged from a recent research project funded by the UK Science and Engineering Research Council and Department of Trade and Industry involving Imperial College, Sema Group and BP. This DOMINO project was on Domain Management for Open Systems. Domains, as defined in the Domino project, are a means of grouping objects to which a common management policy applies as well as being a naming context. The Chapter explains how subdomains provide the means of partitioning management responsibility and structuring the overall management of a large distributed system. The use of access rules as a flexible means of specifying relationships between managers and the objects they manage is also explained. An example of the use of domains for configuration management is described and some of the issues relating to implementation of the domain concepts are briefly discussed.17.1 Requirements for management of large distributed systemsA distributed system may consist of a variety of types of objects which have to be managed, for example users and the agents representing users in the system; hardware components such as workstations, mainframes, modems, software components such as processes, threads or files; services such as databases or electronic mail and the servers which implement them. In a very large distributed system there may be millions of objects, making it impossible to specify management policy for individual objects. Instead it is necessary to specify policy for groups of objects. (Note that the term object is being used in this chapter as an entity which encapsulates state and processing. There is no implication about the concept of inheritance found in many object oriented systems.)A distributed processing application may span the computer systems belonging to a number of different organizations. In general, there is no central authority in such systems and the management of the application as well as the underlying communication and processing resources may have to operate across organizational and legislative boundaries. Peer-to-peer negotiation between independent managers are needed to define policies for managing inter-organizational interactions.There would be multiple hardware and software vendors supplying the components for such an environment and so management has to accommodate heterogeneity of hardware and operating systems as well as software components implemented in a variety of programming languages. This heterogeneity can be found both in objects being managed and within the management system itself.The communication system supporting this distributed processing is typically made up of multiple interconnected local area and wide area networks which implies a variety of protocols and communication mechanisms to be supported.The components and services being managed are physically distributed with genuine parallelism between components. This makes it difficult to obtain consistent global state information on which to base management decisions, or to synchronize management actions on different components.The above characteristics of a large distributed system lead to the following requirements for management of such systems:•Management cannot be centralized in a single human or automated entity but must be distributed to reflect the distribution of the system being managed.•There is a need to automate as much as possible of the management which will thus have to cater for a mixture of both automated and human manager objects.•Management must be structured to partition and demarcate responsibility amongst the multiple managers. This structuring could reflect physical networkconnectivity, structuring of the distributed application or possibly reflect thehierarchical management structure (for example corporate headquarters, regional,site, departmental, and section management) found in many organizations.•Management will have to be implemented as a set of distributed components, with interaction between peer managers, and hierarchical interaction between higher levelmanagers and lower level managers.•There will be a variety of managers fulfilling different roles and operating in different contexts, but having responsibilities for the same object. For example themaintenance engineer and the user of a workstation have different managementresponsibilities for the same workstation. The management structure must be ableto model these overlapping responsibilities.•Flexibility in naming of objects is needed which permits human managers to assign aliases of their choice to the objects they manage.Domains provide the framework for partitioning management responsibility by grouping objects in order to specify a management policy and thus coping with the complexity of management identified above.17.2 Domains17.2.1 ConceptsDomains provide a flexible and pragmatic means of specifying boundaries of management responsibility and authority. A domain is an object which represents a collection of objects which have been explicitly grouped together to apply a common management policy.From the user's view, objects exist in a domain but this does not imply the strict containment relationship found in OSI managed objects (see chapter 5). Domains in fact hold references to member objects as shown in figure 17.1. In addition, domains provide a flexible structuring of the name space for identifying objects as explained below. Domains are a generalization of the concepts of a tree structured directory system.It is not practical to specify membership of a domain in terms of a predicate on attributes of objects in a distributed system. For example, to determine the membership of a domain based on the predicate 'objects created before 1 January 1990' would require checking the creation date attribute of all distributed objects throughout the system. The only valid management domains are those where the members have been explicitly inserted into the domain or created in the domain.Most management applications require persistent domains, and it must be possible to create an empty domain and later include objects in it. This permits the definition of a management structure for a system and then populating it with managed objects. Since domains are themselves objects, they may be members of other domains.Domains provide the means of naming and applying policy to managed objects so all managed objects must exist within a domain. Objects should always be created within a domain.The concept of grouping objects should not be confused with that of encapsulation. Hierarchical composition can be used to construct a composite object from several primitive or other composite objects (Magee, 1989). The composite object is viewed as a single object forthe purposes of invoking operations and the interface of the composite object hides its internal structure from the user. The component objects are then said to be encapsulated.Encapsulation is an essential concept for coping with the complexity of distributed systems as it permits subsystems containing multiple composite or primitive objects to be treated as a single object with an interface. In particular, a manager may be encapsulated with one or more managed objecta to form a self-managing composite object. Note that although it is sometimes useful to apply a management operation to a set of objects, in many cases the external managers have to perform management operations on the individual objects, which encapsulation prevents. Domains provide grouping but not encapsulation.17.2.2 Domain Relationshipsa) User Viewb) Implementation ViewFigure 17.1 User and Implementation Views of DomainsAny policy specified in terms of the domain will apply to all its members, which are the objects referenced by its policy set . A subdomain is a domain which is a member of another domain so D3 is a subdomain of both D1 & D2 in figure 17.1. Subdomains form the mechanism for partitioning a large group of objects and applying different policies to subsets of the original group or assigning responsibility to different managers. Note that a subdomain is not a subset, as a change of membership of the subdomain does not affect the direct membership of the parent domain.Objects O1, O2, O3 and D3 in figure 17.1 are said to be direct members of D1, whereas O5and O6 are indirect members of both D1 and D2As shown in figure 17.1, objects can be members of more than one parent domain. This fact,which is necessary from the management policy viewpoint as discussed later, makes it difficult to prevent cycles in the domain graph. We advocate a strategy of permitting cycles, and building mechanisms into domain traversal procedures for coping with cycles rather than preventing them.Two domains overlap if there are objects which are members of both domains, for example D3 & O3 in figure 17.1. Overlap arises in many situations relating to sharing of resources such as a gateway between two networks for which both networks have management responsibility or to a person who is a member of two different departments. Overlapping domains reflect the fact that multiple managers can be responsible for an object or that multiple policies apply to the object. Obviously this can lead to conflicts between policies or managers.In some applications there may be a decision to prevent overlap by creating a new domain with an independent manager and all objects from the overlapping set are moved into this new domain. This would be analogous to setting up a new management authority for a service shared by multiple organizations. However the model should permit the overlap case as it does arise in real-life situations. There may be a policy decision to prevent overlap of a particular domain by preventing members of that domain being included in other domains or members of other domains being included in that domain.Maintenance DomainDomainMaintenance objectFigure 17.2 Implicit overlapFigure 17.2 shows two domains used for different management functions — maintenance and resource allocation. In this case an implicit overlap arises because both the maintenance and resource allocation objects relate to the same hardware workstation, although they are different managed objects.Further examples of the use of domains for specifying security policy are given in Chapter 18.The labels attached to objects and references in figure 17.1 are unique identifiers. The requirement for flexible naming of objects for management purposes was identified earlier, but a local name for an object is only unique within the context of a single domain, which can act as a naming context. Domain path names can be used to name objects in a similar manner to the naming schemes discussed in chapter 10. Since objects can be members of multiple domains different path names can map onto the same object., and therefore path names do not provide unique identifiers for objects. Another strategy for unique identifiers is needed, as explained in section 17.7.2.17.3 Managers and managed objectsA managed object is an object with a management interface. An object may have other interfaces representing its normal functionality. For example a file server would have a normal functionality interface to open, close, read and write files and a management interface to change caching strategy, modify the numbers of buffers allocated to requests or to enable/disable the service. It may be necessary for a managed object to be a representation of an external resource such as a hardware entity but for many software components the managed object is the resource itself. In the OSI approach to management (ISO 10040), the managed object is modeled as a separate object from the resource it represents. This is applicable to managing hardware resources or to a database approach where there is a database object representation for resources. It is not a suitable generalized approach for managing distributed processing components as it introduces a level of indirection into interactions between managers and resources as well as problems in maintaining consistency between resource state and the managed object state. As OSI-compliant managed resources emerge, they are likely to have anOSI management interface and a normal functionality interface.Figure 17.4 Management interactionsThe typical management interactions indicated in figure 17.4 indicate the need for a remote procedure call interaction mechanism for requesting information and performing control actions. In addition an asynchronous unidirectional message primitive is need to support notification of events. The ISO Common Management Information Protocol does support the above type of interactions, although simple distributed processing interaction primitives as described in chapter 3, would be easier and more efficient to use.Another problem about the OSI management framework is that it insists on managers interacting via a manager agent which is in the same system as the managed objects and shields them from direct interaction with managers. This arises out of the historical OSI insistence of protocols only being defined between peer entities and a manager and managed objects are obviously not peers. Delegation of detailed management from a remote manager to local node manager, with the remote manager acting in a supervisory capacity, is a sensible hierarchical implementation approach for some applications (Yemini et al , 1990.) However this is not what OSI management framework is advocating as the management decisions are still being made by remote managers.17.4 Management Relationships 17.4.1Access RulesManagers are normally not members of the domains they manage, as in many cases different policies apply to managers and the objects they manage. Other reasons for maintaining a separation between managers and the domains they manage is that this permits managers in one organization to be given (limited) management rights over objects in another organization and structuring a system into subdomains would require including a manager into every subdomain.Access rules (figure 17.5) provide a flexible means of specifying management authorisation policy as a relationship between a manager domain and managed domain in terms of the operations managers are authorized to perform on the managed objects. A manager domain contains manager objects and a managed domain contains managed objects. Access rules can also specify constraints such as the permissible time of access or location of managers.Figure 17.5 Access RulesAn access rule is a generalized means of specifying access control policy which has been applied to management (Moffett et.al, 1990). It permits the specification of arbitrary management relationships as shown in figure 17.6.•There may be multiple managers in a domain for improved availability or performance•Managers may perform multiple roles and so be responsible for managing a number of different domains.•Managers may themselves be managed objects permitting hierarchical management relationships.•Managers can optionally be members of a domain they manage which permits a reflexive management relationship whereby managers manage themselves.AccessThere is a need for self-managed objects which encapsulate manager and managed objects. However this object is not a domain but a composite object (see chapter 19) constructed using hierarchical composition which hides its internal structure behind an interface.D3Figure 17.7 Inheritance of Access RulesObjects in a subdomain, by default, 'inherit' the access rules applying to direct and indirect parents. In figure 17.7 objects in domain D2 inherit the access rule applying to the parent domain D1 so can perform operations (OpA & OpB) on objects in domains D3 and D4 as the latter is a subdomain of D3. There may be more than one access rule which satisfies a particular request, for example as a result of an object's membership of overlapping domains. This indicates that authority has been granted via more than one route. The implications of thisinheritance is that the domain service must provide a means of determining the parent and ancestor (indirect parent) domains of an object to determine what policies apply to that object.It is also necessary to control inheritance at both the domain and access rule level. A particular access rule can specify that it applies only to direct member of the source and/or target domains or a domain can specify no inheritance of any access rule by its subdomains.17.4.2 Representing usersTwo default domains shown in figure 17.8 are needed to represent human users within the system:i) A User Representation Domain (URD) is a persistent representation of the humanuser or manager. When the user logs into the system an user interface object is created within the URD and inherits all access rules specified for the URD.ii) A User Personal Domain (UPD) corresponds to a user's home directory and represents the personal resources which the user 'owns'. In addition the user may have limited access to other service domains representing the shared resources the user can access.User PersonalUser RepresentationService DomainsFigure 17.8 Default User Domains17.4.3Manager PositionsIt is necessary to specify the rights of a manager position independently of the human manager who occupies that position so that when the human manager is transferred to another position, the access rules pertaining to the position do not have to be changed. This can be accomplished by a creating a Manager Position Domain and specifying all access rules with respect to this domain. Allocating a human manager to a position is accomplished by including his/her URD within the position domain. The manager automatically inherits all rights for that position and may be a member of multiple position domains if performing multiple management roles. The model permits multiple URDs to be included in a Manager Position domain indicating a shared position but obviously this would require the managers to coordinate their activities via a suitable protocol.Figure 17.9 Manager Positions17.5 Application to Configuration Management (CM)In the previous sections we have explained the basic concepts of management domains and access rules. We will now discuss how these concepts can be applied to a particular management application, namely configuration management of distributed software components in a distributed programming environment such as the Conic system (Magee et.al, 1989). In this environment a human manager makes use of a configuration language to create sofware components (objects), allocate them to hardware nodes and bind interfaces between component instances. The human manager interacts with a configuration manager object (called cman) which executes the mangement operations on her behalf. Domains and access rules are used to control on which objects the manager can perform configuration management operatiions and what interfaces can be bound.The assumption is that the managed object corresponds to a composite software component with an application specific interface as well as a management interface. An interface type is defined using an Interface Specification Language (ISL), in terms of ports which correspond to operations provided (or messages received) by a server or operations invoked (or messages sent) by a client. Port types define the datatypes of the operation parameters as shown in figure 17.10.define ifdefs = {data = array [512] charname = array [64] charlength = intinterface_xyz ={i:port name -> length, data// bidirectionalj:port name -> int//bidirectionalk:port name, length, data// unidirectional}Figure 17.10 Interface Type DefinitionsThe interface_xyz within the definition unit ifdefs defines 3 operations i, j, k together with the parameters of the operations. Note that port k defines a unidirectional message with no return parameters.A server template would declare the interface as an entry and provide the code to implement the operation defined, while a client template would declare the interface as an exit and invoke operation on the ports (figure 17.11)./* Component is implemented in a suitable programming language - implements operations/*object xyzserver = entry interface_xyz { use xyz_defs: interface_xyz}/* Component is implemented in a suitable programming language - invokes operations /*object xyzclient = exit interface_xyz { use xyz_defs: interface_xyz}Figure 17.11 Declaring Interfaces on Client and ServerWhen an interface on a client object instance is bound to an interface on a server object instance, ports of the same type are bound together. An Access Rule specifies for which port types bindings are permitted. So the binding of xyzclient to xyzserver in figure 17.12 results in ports i and k being bound as j is not permitted by the access rule. Note, that if there is no ambiguity, the interface name can be omitted from a bind statement as in figure 17.12.Figure 17.12 Interface BindingThe generic configuration management operations available include delete, stop, start, and reset components; query, bind and unbind interfaces. Binding can apply to individual ports in an interface or all the ports. Every configurable object must support a server CM interface which defines ports corresponding to each CM operation. Note that a configuration manager may also have a create port which would be linked to a factory object, as this is not part of the generic interface supported by all configurable objects.In general a manager or application programmer would be responsible for initially installing the components of a distributed application or service as well as subsequently replacing components with new versions to support evolutionary change. Reconfiguration can be performed dynamically without shutting down the complete service.A human manager (Fred ) responsible for configuration would have a configuration manager object, called cman, which supports a graphical interface and a CM client interface. This cman would be created in the Fred's URD. The cman interface can be bound to any managed object which implements the CM server interface to permit CM operation to be performed on that object. The operations which cman is authorized to perform are specified as access rules between Fred's URD and the managed domain. Assume Fred decides to reconfigure the application running in Domain D1 which consists of the objects A and B, withB bound to A .He installs a new object ctype and binds it to A in D1 and to xyzserver in domain D2.Manage D1use ctype;// Specifies required templatecreate C : ctype @ loc= 'N2'// Creates an object C at node N2bind C.fileio -- A.fileioC.xyz -- D2/xyzserver.interface_xyzstart CD1Node DomainFigure 17.13 Configuration Management ExamplePhysical nodes are represented as factory objects which provide a remotely accessible interface to local operating system facilities for loading object templates and creating object instances. In Figure 17.13 an access rule gives Fred access to Nodes N1 and N2. Fred can perform any configuration management operation on objects in D1, but can only perform bind operations on objects in D2. The bind between D1 and D2 permits C to invoke only operations i and k on xyzserver. Note that if a manager has CM {all} permission on a domain he can perform arbitrary configuration management of objects in that domain including binding of any type compatible interfaces of objects which are direct members of that domain but configuration between that domain and any other is subject to access control.17.6 Inter Organizational DomainsAs explained in section 17.1, a large distributed application may span multiple organisations. Managers in one organsiation may need to perform, possibly limit operations on objects in othre organisations, for instance to query state or perform diagnostic tests. The Domain Service must therefore be capable of supporting inter-organizational management. The domain hierarchy is also used as a means of naming objects and so it should be possible to includeobjects or subdomains from another organizational hierarchy into your own domain hierarchy,assign a local name to these objects and hence manage or just access the objects. However including organization A's domain into the policy set of organization B's domain implies that the A's subdomain inherits policy applying to the B's domain, which would violate the mutual independence of the two organizations. The domain permits context references to other objects (usually domains) which do not carry policy implications; in this case the referencing domain is not considered as a parent of the referenced domain so there is no inheritance of policy such as access rules (see figure 17.14). A domain may therefore hold two sets of object references, the policy set to which domain policy will, by default, apply, and the context set to which domain policy does not apply. If a member of Imperial College Staff has access to the DOC Domain, he can obtain an address for objects in the BP/Research domain, but he cannot access those objects as access rules applying to the DOC domain do not apply to context references. A separate access rule must be set up to enable Imperial College Staff to access the BP/Research domain.BPImperial CollegeFigure 17.14 The Use of Interorganization Context ReferencesThe disadvantage of this scheme is that it does not use a well known naming convention and so cannot use any existing directory service to locate objects in remote organizations. The addresses of objects from other organizations must be inserted manually. A solution we have adopted is to set up a domain hierarchy at each organization which mirrors the structure of the well known Internet Domain Naming system (see figure 17.15). We could equally have used X.500 naming, but it is not yet widely used.//IC Domain HierachyBP Domain HierachyFigure 17.15 Context References Plus Well Known Naming17.7Domain ServiceThe description of the domain service has so far been from a functional point of view. We will now take a more detailed look at the interface the domain service provides to users and how this interface is actually implemented by means of a set of servers.The domain service provides the underlying services required for naming and grouping objects for applying management policy. This is used by all aspects of management as well as configuration management as shown in figure 17.16Userbe able to use a mechanism which provides an efficient implementation of the functions seen by the user. This distinction is similar to Ansa’s (1991) five different viewpoints of a system, but we find the simple binary distinction of views adequate for our purposes.17.7.2 Object ReferencesUsers refer to objects by local textual names which are only unique within the context of a domain. An Object Identification Descriptor (OID) is used internally within the system to reference objects. This OID is unique across a much broader namespace - all systems supporting a domain service. The domain service provides the means of translating between these two forms of identifiers.Figure 17.17 Object Entry held by Domain ServiceFigure 17.17 shows the format of the OID. Every object is assigned a unique identifier, created from the Host IP address where it was first created plus a uniquefier (time stamp or random number). This does not change if the object is migrated to another host. The current implementation uses actual addresses as a means of locating objects, but the system could be extended to use an X.500 distinguished name (see 10.2.3) or a group address for replicated objects. The freshness index associated with the actual address is incremented when the object is migrated so two addresses for the same object can be compared to find the most recent one.17.7.3 Domain OperationsThe following set of operations are supported by our domain service implementation: Create/destroy a subdomain;Include/remove object in/from domain policy set;Include/remove object in/from domain context set;List domain - returns policy set and context set entries;Query object's parents - returns OIDs of direct parents;Query object's ancestors - returns list of direct and indirect parent OIDs;Translate path name to OID and address;Translate OID to path name, choosing an arbitrary path name where there are multiple paths through the domain tree to the object.Note that object creation is not considered a domain service operation, but is invoked on an object factory which creates the object and includes it within a domain as an atomic action. Object deletion is performed on the object itself and the object support system attempts to。
Tracking the LV in Velocity MR Images Using Fuzzy Clustering
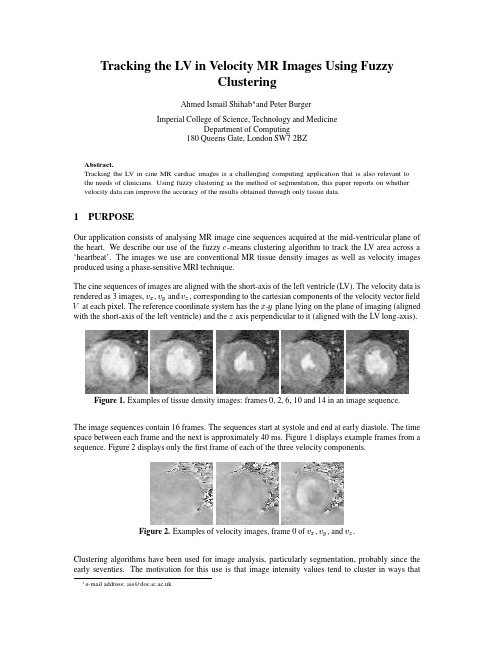
Tracking the LV in Velocity MR Images Using FuzzyClusteringAhmed Ismail Shihab and Peter BurgerImperial College of Science,Technology and MedicineDepartment of Computing180Queens Gate,London SW72BZAbstract.Tracking the LV in cine MR cardiac images is a challenging computing application that is also relevant to the needs of ing fuzzy clustering as the method of segmentation,this paper reports on whether velocity data can improve the accuracy of the results obtained through only tissue data.1PURPOSEOur application consists of analysing MR image cine sequences acquired at the mid-ventricular plane of the heart.We describe our use of the fuzzy-means clustering algorithm to track the LV area across a ‘heartbeat’.The images we use are conventional MR tissue density images as well as velocity images produced using a phase-sensitive MRI technique.The cine sequences of images are aligned with the short-axis of the left ventricle(LV).The velocity data is rendered as3images,,and,corresponding to the cartesian components of the velocity vectorfield at each pixel.The reference coordinate system has the-plane lying on the plane of imaging(aligned with the short-axis of the left ventricle)and the axis perpendicular to it(aligned with the LV long-axis).Figure1.Examples of tissue density images:frames0,2,6,10and14in an image sequence.The image sequences contain16frames.The sequences start at systole and end at early diastole.The time space between each frame and the next is approximately40ms.Figure1displays example frames from a sequence.Figure2displays only thefirst frame of each of the three velocity components.Figure2.Examples of velocity images,frame0of,,and.Clustering algorithms have been used for image analysis,particularly segmentation,probably since the early seventies.The motivation for this use is that image intensity values tend to cluster in ways thatcorrespond to the physical description of the image.So,for example,in a picture of a dark-coloured aeroplane up in the sky,the sky’s colour would cluster around“bright blue”,while the aeroplane’s colour would cluster around“dark grey”.There are many types of clustering algorithms.In this paper,we use an objective-function-type algorithm called fuzzy-means(FCM)that outputs fuzzy descriptions of each of the clusters.See[2]for a general review of FCM’s use in MR image segmentation.FCM has also been used for segmentation of Nuclear Medicine cardiac images[3].A variant of FCM,called the fuzzy-shells(FCS)algorithm,has been used to segment the myocardial wall in MR images[4].2METHODFuzzy-Means(FCM)is an objective-function-based method of clustering.It is also sometimes called fuzzy ISODATA.The monograph by James Bezdek[1]is the most widely cited reference for FCM.The input to any clustering algorithm is called the data set.There is no agreed-on name for the output; this is because it depends on the type of algorithm used.In the abstract sense,the output of the algorithm is a description of the clusters it found.A suitably concise output is a set of prototype data points,where each of these prototypes represents a cluster of data points.In the simplest case,the prototype location is the geometric mean of the locations of data points in the cluster it represents.This way,the aim of the algorithm becomesfinding the best placement of these prototypes.Mathematically,this can be formulated using an objective function.Assuming that we are looking for prototypes,the objective function measures how good(or bad)the set of prototypes describes the data set.The clustering suggested by FCM is a fuzzy one,i.e.,each data point has a degree of membership with each of the prototypes.The value of this degree lies between0and1;the closer it is to0the less the prototype is representative of the point,while the closer it is to1the more the prototype is representative of the point.The memberships can be arranged in a matrix,called the fuzzy partition matrix,which gives for each data point,its memberships with each of the prototypes.Now we state the problem mathematically.FCM seeks to minimise the objective function:subject to where is the number of points in the data set,is the number of clusters,is a fuzzy-partition matrix,and is the-set of prototypes. is the distance metric given by where is any inner product induced norm.The solution commonly used is an iterative one based on the gradient descent technique.The algorithm iteratively minimises the value of the objective function by changing the location of the prototypes and their associated memberships according to some derived update equations.As like other iterative optimisation methods,FCM may provide locally-optimal solutions of the objective function.Be-cause of the possible presence of one or more locally-optimal solutions,the solution of an FCM run depends on the initialisation of that run.An important requirement for the application of the FCM algorithm and its derivatives is that,the number of prototypes,must be provided by the user.There are various options we can take when using FCM and its extensions and derivatives.Thefirst is the choice of metric with which points are compared to the prototype.Another choice to make is the prototype description.Normally this is taken to be a point, however clusters may not always be shaped like point clouds(hyper-elliptically-shaped),but can rather take other shape formations.As the cluster we seek(the LV)is more or less hyper-elliptical in shape we can safely use a point prototype.To simplify computational calculations,the metric with which to compare points to prototypes is chosen to be Euclidean distance.3RESULTSWe assessed the impact of velocity data by clustering first with-Vθϕyzv xv zv y xFigure 3.and define the directionof the velocity vector at a given point.out it,and then with combinations of it.The input in the first instance was three-dimensional:and ,for the and co-ordinates of a pixel;and ,for the tissue density at that pixel.In the second experiment we added a fourth dimension,,con-sisting of the combined magnitude of the ,,and velocity components at each pixel,as shown in figure 3and described by:4CONCLUSIONSAs the aim of our research is to empower the clinician with a simple-to-use tool like FCM,we did not attempt to derive a new algorithm to take account of the special nature of the velocity data.Our results prove that including the velocity magnitude data in the data set can actually give misleading results,but that the directional velocity information is useful in verifying density-data results.The FCM algorithm has proven itself to be quite robust.Given the fact that it starts with almost no prior information,it is quite accurate.However,we note the shortcoming of having to experiment in order to find a suitable value for.We remind the reader that we avoided the problem of non-repeatability of results by using the result of one frame to start off the next.However,the problem of non-repeatability still exists when we cluster thefirst frame.Our technique is easy to use and very intuitive;clinicians immediately grasped its application.The accuracy of our results show a lot of promise.AcknowledgementsWe would like to thank Dr Philip Kilner of the MR Unit,Royal Brompton Hospital for his comments on the results of our research.References1.J.Bezdek.Pattern Recognition with Fuzzy Objective Function Algorithms.Plenum Press,1981.2.M.C.Clark,L.O.Hall,D.B.Goldgof et al.“MRI segmentation using fuzzy clustering techniques.”IEEEEngineering in Medicine and Biology Magazine13(5),pp.730–742,1994.3. A.Boudraa,J.-J.Mallet,J.-E.Besson et al.“Left ventricle automated detection method in gated isotopic ventricu-lography using fuzzy clustering.”IEEE Transactions on Medical Imaging12(3),September1993.4.H.-K.Tu,D.B.Goldgof&E.Backer.“Utilizing fuzzy-shells for automatic approximate lv location for initializa-tion of myocardial structure and functions analysis algorithm.”In Medical Imaging1994:Physiology and Function from Multidimdensional Images.1994.。
cv

References:
Mr. J. Byers-Elllis. Manager, Retail Outlets Division, Delicatessen International, Riverside House, 22 Charles St, London EC7X 4JJ. Dr. Margaret McIntosh, Director of Studies, University of Essex Business School, Colchester CR3 5SA
Consider first impressions
Inappropriate email addresses Unprofessional messages on answer phones
If in shared accommodation ensure people are primed to take messages
Write what you want to work in as:
Required Position. The field of interest. The kind of the company.
There are several correct ways to format your letterhead
No
Bold to emphasis
Make frequent use of active verbs, such as,
achieved, set up, managed, responsible for, led.
Make clear what your individual contribution was using positive language and include your responsibilities and achievements. Back everything up with quantifiable facts, such as size of budgets and results achieved, to make your skills tangible.
ртфм 2007 - 2011 Ford Expedition 2011 Ford Explore

Page 1©2007 Whelen Engineering Company Inc.Form No.14105A (020911)For warranty information regarding this product, visit /warrantyA u t o m o t i v e : Installation Guide:Lightbar Roof Rack Mount 2007 - 2011 Ford Expedition2011 Ford Explorer®ENGINEERING COMPANY INC.Internet: Sales e-mail:*******************Customer Service e-mail:*******************51 Winthrop Road,Chester, Connecticut 06412-0684Phone: (860) 526-9504Set Screw (QTY 4)Stop Nut (Qty 6)Installation:IMPORTANT! The lightbar should be a minimum of 16" from any radio antennas!1.Remove the cover from roof rack (see photos), insert the 3 slide mounts into the track in the roof rack and replace the cover (Fig. 1).2.Snap the nylon retaining washers onto the slide mounts then secure the mounting bracket to the slide mounts with the supplied hardware.3.Insert the 3 slide mounts into the tracks on the vehicle roof rack then snap the “nylon retaining washers” onto the slide locks. This will hold them in place while you are doing the installation.4.Slide both mounting brackets into their track in the bottom of the lightbar base (Fig. 2) and secure them there with the supplied set screws.5.When you have positioned the mounting slides where you wish to mount the lightbar, secure the bracket to the slides using the supplied 14-20elastic stop nuts and 1/4” flat washers (Fig. 3) and installation is complete.©2007 Whelen Engineering Company Inc.Form No.14105A (020911)For warranty information regarding this product, visit /warrantyA u t o m o t i v e : Installation Guide:Lightbar Roof Rack Mount 2007 - 2011 Ford Expedition2011 Ford Explorer®ENGINEERING COMPANY INC.Internet: Sales e-mail:*******************Customer Service e-mail:*******************51 Winthrop Road,Chester, Connecticut 06412-0684Phone: (860) 526-9504Set Screw (QTY 4)Stop Nut (Qty 6)Installation:IMPORTANT! The lightbar should be a minimum of 16" from any radio antennas!1.Remove the cover from roof rack (see photos), insert the 3 slide mounts into the track in the roof rack and replace the cover (Fig. 1).2.Snap the nylon retaining washers onto the slide mounts then secure the mounting bracket to the slide mounts with the supplied hardware.3.Insert the 3 slide mounts into the tracks on the vehicle roof rack then snap the “nylon retaining washers” onto the slide locks. This will hold them in place while you are doing the installation.4.Slide both mounting brackets into their track in the bottom of the lightbar base (Fig. 2) and secure them there with the supplied set screws.5.When you have positioned the mounting slides where you wish to mount the lightbar, secure the bracket to the slides using the supplied 14-20elastic stop nuts and 1/4” flat washers (Fig. 3) and installation is complete.。
London SW7 2AZ
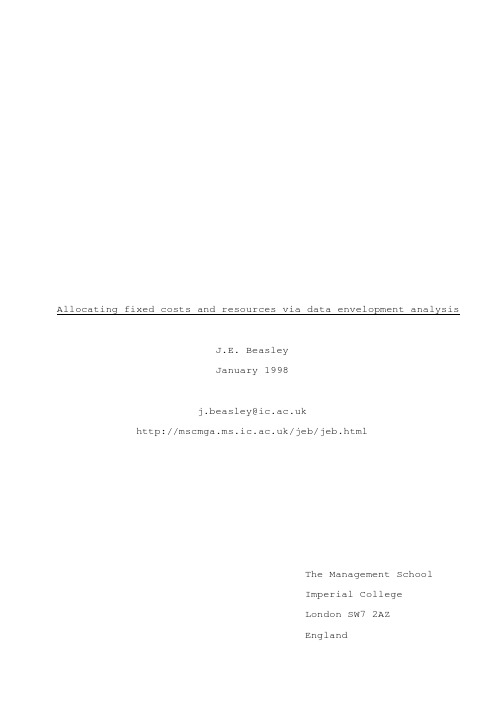
Allocating fixed costs and resources via data envelopment analysisJ.E.BeasleyJanuary1998j.beasley@/jeb/jeb.htmlThe Management SchoolImperial CollegeLondon SW72AZEnglandABSTRACTIn this paper we first(trivially)show that data envelopment analysis can be viewed as maximising the sum of the efficiencies of the decision-making units(DMU’s)in the organisation.Building upon this we present nonlinear models for:(a)allocating fixed costs to DMU’s and(b)allocating resources to DMU’s.Simultaneous to allocating resources output targets are also decided for each DMU.Numeric results are presented for a small example problem.Keywords:data envelopment analysis,efficiency,cross-efficiencies,cost allocation,resourceallocation,target setting1.INTRODUCTIONData envelopment analysis(DEA)was first put forward by Charnes,Cooper and Rhodes[10]in1978and is used for evaluating the(relative)efficiency of decision-making units (DMU’s)in an organisation via weights attached toinput/output measures.The standard interpretation of DEA is that each DMU separately chooses those weights that maximise its efficiency.In fact it is trivial to show that an equally valid interpretation of DEA is that weights are chosen simultaneously for all DMU’s so as to maximise total organisational efficiency.However this interpretation of DEA as maximising organisational efficiency is a powerful one.Based upon it we develop in this paper models for:(a)allocating fixed costs to DMU’s;and(b)allocating resources to DMU’s.As will become apparent below the model we develop for allocating resources to DMU’s simultaneously decides output targets for each DMU.Numeric results are presented for a small example problem to illustrate our models.We assume throughout this paper some familiarity with DEA.Readers new to DEA are referred to[5,7,9,18,26].2.REINTERPRETING DEALet:s be the number of output measurest be the number of input measuresn be the number of DMU’s which are being evaluated with respect to one anothery ip be the value(≥0)of output measure i(i=1,...,s)for DMU p(p=1,...,n)x jp be the value(≥0)of input measure j(j=1,...,t)for DMU p(p=1,...,n)u ip be the weight(≥0)attached to output measure i(i=1,...,s)by DMU p(p=1,...,n)v jp be the weight(≥0)attached to input measure j(j=1,...,t)by DMU p(p=1,...,n)e pq be the(relative)efficiency of DMU q(q=1,...,n)whenevaluated using the weights associated with DMU p(p=1,...,n)εbe a very small"non-Archimedean"number(>0)then e pq is defined by:e pq=(u ip y iq)/(v jp x jq)p=1,...,n;q=1,...,n(1)where:0≤e pq≤1p=1,...,n;q=1,...,n(2) Note here that e pq is the cross-efficiency of DMU q when evaluated using the weights associated with DMU p(see[15,27,31]).The standard DEA approach is to determine the efficiency (e pp)of any DMU p using the nonlinear program:maximise e pp(3)subject toe pq=(u ip y iq)/(v jp x jq)q=1,...,n(4)0≤e pq≤1q=1,...,n(5) u ip≥εi=1,...,s(6) v jp≥εj=1,...,t(7) Equation(3)maximises the efficiency of the DMU p being considered,equation(4)defines the efficiencies of all DMU’s q with respect to the weights chosen for p,equation(5) restricts all efficiencies to lie between zero and one whilst equations(6)and(7)ensure that the weights chosen must be non-zero.This nonlinear program can be converted into a linear program using an approach due to Charnes and Cooper[6]and hence easily solved.This nonlinear program can be interpreted as allowing DMU p to choose those weights which maximise its efficiency when compared to its peers.Typically to determine all DMU efficiencies the above nonlinear program(equations(3)-(7))is solved n times,once for each value of p(p=1,...,n).However we can solve a single nonlinear program to accomplish the same task.Simply maximise the sum of DMU efficiencies(e pp)subject to equations(4)-(7),but with these equations repeated for each value of p(p=1,...,n).Informally we are simply consolidating n independent nonlinear programs into a single nonlinear program.This consolidated nonlinear program is:maximise e pp(8) subject toe pq=(u ip y iq)/(v jp x jq)q=1,...,n;p=1,...,n(9)0≤e pq≤1q=1,...,n;p=1,...,n(10) u ip≥εi=1,...,s;p=1,...,n(11) v jp≥εj=1,...,t;p=1,...,n(12) In other words we have(trivially)shown that DEA can beviewed as maximising the sum of the efficiencies of the DMU’s in the organisation.Another way of interpreting this consolidated nonlinear program is that weights are chosen simultaneously for all DMU’s so as to maximise total organisational efficiency.Note that the standard DEA approaches to incorporateextra constraints to better reflect the situation being modelled(e.g.see[1,11,12,17,28-30,36,37])can also beapplied to this consolidated nonlinear program.Note too here that in our consolidated nonlinear program the cross-efficiencies explicitly appear.A number of papersin the literature, e.g.[3,14-16,23,27,31-33],have arguedthat cross-efficiencies have a greater role to play in DMU evaluation than they are conventionally accorded.Summarising this section then,we have reinterpreted DEA as consisting of a single nonlinear program viewed at the organisational level.This organisational level view isprecisely what we need if we are to make decisions across the entire organisation,for example the allocation of fixed costs and resources,and it is these that we consider below.3.ALLOCATING FIXED COSTSSuppose that the organisation has a total fixed (overhead)cost that has been incurred and it desires to allocate a proportion of this fixed cost to each of the DMU’s in an appropriate fashion.This problem is a common one encountered in organisational budgeting/costing,namely tosplit an overhead cost amongst different departments.3.1Previous DEA-based workAs far as we are aware the only paper in the literature considering this fixed cost allocation problem from a DEA viewpoint is by Cook and Kress[13].In their paper they propose that an appropriate allocation in the case of just a single output is one where the fixed cost allocated to DMU pis proportional to its virtual input(v jp x jp).For thegeneral case their approach relies on choosing one DMU fromthe set of efficient DMU’s(e.g.via cone-ratio[11,12] constraints).Once such a DMU has been chosen a costallocation can be deduced.3.2DEA-based fixed cost allocation modelBased upon our reinterpretation of DEA as choosingweights for all DMU’s simultaneously we can develop a simple DEA-based model for allocating fixed rmally we can regard the fixed cost allocated to a DMU as just anotherinput.It would seem logical therefore to allocate fixed costs so as to maximise total organisational efficiency.Let:F be the total fixed cost(≥0)that is to be allocatedf p be the amount(≥0)of fixed cost allocated to DMU p(p=1,...,n)w p be the weight(≥0)attached to fixed cost by DMU p(p=1,...,n)then our DEA-based fixed cost allocation model is:maximise e pp(13) subject toe pq=(u ip y iq)/(v jp x jq+w pf q)q=1,...,n;p=1,...,n(14)f p=F(15)f p≥0p=1,...,n(16)w p≥εp=1,...,n(17)0≤e pq≤1q=1,...,n;p=1,...,n(18)u ip≥εi=1,...,s;p=1,...,n(19)v jp≥εj=1,...,t;p=1,...,n(20) Comparing this model and the basic DEA model(equations(8)-(12))it is clear that equation(14)which definesefficiencies has been amended to include fixed cost as aninput measure whilst equation(15)ensures that all of thetotal fixed cost is allocated.Equations(16)and(17)impose appropriate lower bounds on f p and w p.With regard to computational considerations the abovenonlinear fixed cost allocation model(equations(13)-(20))can be simplified algebraically by using equation(14)tosubstitute for e pq in equation(18)and for e pp in equation(13).Once this has been done the resulting nonlinear programhas(s+t+2)n variables and(n2+1)constraints(ignoringvariable bounds).This nonlinear program should be well withinthe solution range of modern software(e.g.[24,25])providedthe number of DMU’s is not large.3.3Numeric exampleWe illustrate the above nonlinear model for allocating fixed costs using a small numeric example.This involves n=10 DMU’s,s=2output measures and t=2input measures and is taken from[20].The data is shown in Table 1.Taking F=1000and solving to determine the allocation of fixed costs we get the results shown in Table 2.Note herethat throughout this paper we solved usingε=0.001and usedthe nonlinear programming software package GINO[24]running on a Pentium133MHz pc.None of the examples considered inthis paper required more than20seconds for their solution.We first give in Table2the efficiency for each DMU as calculated using the basic DEA model.This is followed by the allocated fixed cost and the efficiency of each DMU with that fixed cost allocated.For example DMU1has a basic DEA efficiency of0.330,an allocated fixed cost of37.51and an efficiency with that fixed cost allocated of one.Observe that no DMU has a worse efficiency afterallocation of fixed costs than before.Whilst this might seem counter-intuitive(how can allocating a fixed cost as an input not decrease the efficiency of a DMU?)such behaviour iseasily explained in terms of the nonlinear program.Comparing the basic DEA model(equations(8)-(12))andthe fixed cost allocation model(equations(13)-(20))we have that algebraically any feasible solution to the basic DEA model is automatically feasible for the fixed cost allocationmodel for any values of w p and f p.Hence suppose we substitute the optimal weights from the basic DEA model into the fixed cost allocation model.For ease of argument assume thatεis infinitesimal.Then we have that with these optimal weightsthe optimal solution to the basic DEA model is numerically equal to the objective function value of the fixed cost allocation model for any fixed cost allocation with w p=ε(p=1,...,n).As we have flexibility to consider values of w p>εwe may be able to better the efficiency value for DMU p compared with the efficiency value found before fixed cost allocation.In other words our fixed cost allocation model must,for each DMU,lead to an efficiency value at least equal(and possibly better)than that found before fixed cost allocation. In particular,a DMU which has efficiency one in the basic DEA model will also have efficiency one after fixed costallocation.As is common in DEA models the particular optimalsolution to our fixed cost allocation model given in Table2is not unique,i.e.other fixed cost allocations lead to the same optimal objective function(equation(13))value.If z*is the optimal objective function value(z*=10for ourparticular numeric example)then we can determine,for each DMU p in turn,the range of fixed costs which maintain maximum organisational efficiency by solving:(a)minimise f p subject to equations(14)-(20)and e pp=z*;and(b)maximise f p subject to equations(14)-(20)and e pp=z*.If we do this for DMU1for example we find that the fixed cost range is from zero to54.05.Note here that we believe that determining these fixed cost ranges can potentially be of value to management, providing information about appropriate values for fixed cost allocations that is simply not available without a DEA-based analysis of the type we have proposed here.4.ALLOCATING RESOURCESSuppose that the organisation has flexibility in its allocation of input resources and it desires to allocate these (limited)resources to each of the DMU’s in an appropriate fashion.Probably the most common scenario here is that:(a)we have observed the DMU’s during one time period andhave information on input/output measures for that timeperiod;and(b)for the next time period we must decide at anorganisational level the most appropriate allocation ofinput resources and appropriate output targets for eachDMU.Note here that we believe that this issue of allocating input resources is inextricably linked in practice with the setting of output targets.Even if we have the situation where DMU input resources are given we still have the issue of how to allocate output targets to each DMU so as to satisfy organisational limits on total output.We distinguish in this paper between the terms target setting and resource allocation.We define:(a)target setting to be the setting of input/output levelsfor DMU’s when the organisation has unlimited inputresources and unlimited output possibilities(b)resource allocation to be the setting of input/outputlevels for DMU’s when the organisation has limited input resources or limited output possibilities.Clearly this distinction is somewhat arbitrary but it does capture common DEA usage of these terms.Typically in the DEAliterature target setting for DMU’s assumes(implicitly) unlimited input resources and unlimited output possibilities. In such cases targets can be set for DMU’s individually.We would remark here that although the issue ofallocating limited input resources amongst DMU’s has long been recognised(e.g.[4,page105]and[5,page10])little seems to have been achieved.4.1Previous DEA-based work:target settingDEA can be used to set input/output targets forinefficient DMU’s based upon their position relative to the efficient frontier.Specifically for an inefficient DMU there exists an"output maximisation"target for which the DMU becomes efficient and an"input minimisation"target for which the DMU becomes efficient.There appears to be relativelylittle DEA work that has moved beyond this.Golany[19]presented a paper dealing with generating output targets for a DMU with known inputs.His procedure involved generating a number of different output targets from which the DMU could choose.Thanassoulis and Dyson[35]presented target setting as being concerned with the solution of various mathematical programs,the precise program to be used being dependent upon DMU preferences.Golany,Phillips and Rousseau[20]presented a paper concerned with target setting via the solution of various mathematical programs.Target setting was based either on a normalised distance from the efficient frontier or using knowncosts/prices for input/output factors.They also considered target setting for a"new"DMU with known inputs or with known costs/prices for input/output factors.4.2Previous DEA-based work:resource allocationAs for target setting relatively little DEA work has been done on resource allocation.Golany,Phillips and Rousseau[20]presented a five-step procedure for input resource allocation at an organisational level.Essentially their procedure reduces to solving a linear program involving an objective function weighted according to DMU efficiencies.Their procedure does not compute output targets.Their work uses the additive DEA model of Charnes, Cooper,Golany,Seiford and Stutz[8].As noted in Green,Cook and Doyle[22]this model is flawed.Golany and Tamir[21]presented a resource allocation model which simultaneously determines input and output targets based on maximising total output.Their model only applies in the case of a single output.For the multiple output case they suggest applying predetermined subjective weights to each output measure.Athanassopoulos[2]presented a goal programming model incorporating ideas from[35].A key feature of his work was that DMU’s were linked at the global level.Thanassoulis[34]presented a paper dealing with the single input case.He presented a mixed-integer program to simultaneously cluster DMU’s into k distinct sets and to determine a marginal resource level(MRL)for each outputmeasure for each such cluster.MRL’s were defined as the rate of(input)resource entitlement per unit of output.Once MRL’s have been found a logical numeric basis exists for futureinput resource allocation by human decision-makers.4.3DEA-based resource allocation modelBased upon our reinterpretation of DEA as choosingweights for all DMU’s simultaneously we can develop a simple DEA-based model for resource allocation.We would stress here that,in contrast to the majority of the work cited in the previous section([20,21,34])which deals with special cases, our model is completely general.Suppose that the DMU’s have been observed for the time period[t1,t2]and the next time period for which we must perform resource allocation is the time period[t3,t4].Now having observed the DMU’s for the time period[t1,t2] and having information on input/output measures for this time period we can formulate and solve the basic DEA model (equations(8)-(12))to determine efficiencies and weights.Suppose that this has been done.Then we shall adopt the notation that values associated with this observed time period are denoted by a capital letter, e.g.E pp is the calculated efficiency of DMU p based on our observations,V jp is the calculated weight attached to input measure j by DMU p,X jp is the observed value of input measure j for DMU p.For the next time period[t3,t4]we need now only take our basic DEA model(equations(8)-(12))but with the changesthat:(a)y ip are no longer known constants but are variables,specifically y ip(≥0)represents the target value assigned to output measure i(i=1,...,s)by DMU p(p=1,...,n)(b)x jp are no longer known constants but are variables,specifically x jp(≥0)represents the amount of inputresource j(j=1,...,t)allocated to DMU p(p=1,...,n)(c)additional constraints are added to:(1)ensure total output limits are not exceeded;(2)ensure total input resources are not exceeded;(3)link variable values in the next time period[t3,t4]to observed/calculated values in the previous timeperiod[t1,t2].Let S i be the total output limit for output i(i=1,...,s)across the organisation in the next time period and let T j be the total amount of input resource j(j=1,...,t)available across the organisation in the next time period.Forsimplicity here we consider just upper limits on totaloutputs/inputs,lower limits on total outputs/inputs can be easily dealt with.Then our DEA-based resource allocationmodel is:maximise e pp(21) subject toe pq=(u ip y iq)/(v jp x jq)q=1,...,n;p=1,...,n(22)0≤e pq≤1q=1,...,n;p=1,...,n(23) u ip≥εi=1,...,s;p=1,...,n(24) v jp≥εj=1,...,t;p=1,...,n(25) y ip≥0i=1,...,s;p=1,...,n(26) x jp≥0j=1,...,t;p=1,...,n(27)y ip≤S i i=1,...,s(28)x jp≤T j j=1,...,t(29)e pq∼E pq q=1,...,n;p=1,...,n(30)u ip∼U ip i=1,...,s;p=1,...,n(31) v jp∼V jp j=1,...,t;p=1,...,n(32) y ip∼Y ip i=1,...,s;p=1,...,n(33) x jp∼X jp j=1,...,t;p=1,...,n(34) Comparing this model and the basic DEA model(equations(8)-(12))it is clear that equations(26)and(27)ensure that the output and input values chosen for each DMU arenon-negative.Equation(28)specifies that total output limits cannot be exceeded and equation(29)specifies that totalinput resources cannot be exceeded.In equations(30)-(34)∼means"is related to"and represents the fact that we may wish to impose constraints relating variable values in time period[t3,t4]to their observed values in time period[t1,t2].For example x jp∼X jp could mean0.9X jp≤x jp≤ 1.1X jp which would ensure that the amount of input resource j allocated to DMU p could vary by at most10%from its previous value.Plainly equations(30)-(34)represent value judgments on the part of the organisation.However we believe it likely that,in practice,such judgements must be made.Note herethat equations(30)-(34)do not capture the complete set of value judgements that may be made(they only capture our assessment of the common value judgements that may be made).To illustrate this suppose that our value judgment is that it is appropriate to include the DMU’s from the observed timeperiod more explicitly in the resource allocation model.One constraint we could add would be:0≤(u ip Y iq)/(v jp X jq)≤1q=1,...,n;p=1,...,n(35)which restricts the cross-efficiencies of DMU’s from theobserved time period(with respect to the weights chosen forthe next time period).With regard to computational considerations the abovenonlinear resource allocation model(equations(21)-(34))canbe simplified algebraically by using equation(22)tosubstitute for e pq in equations(23),(30)and for e pp inequation(21).Once this has been done the resulting nonlinear program has2(s+t)n variables and(n2+s+t)constraints(ignoring variable bounds and the value judgement constraints, equations(30)-(34)).This nonlinear program should be withinthe solution range of modern software(e.g.[24,25])providedthat the number of DMU’s and the number of value judgementconstraints are not large.4.4Numeric exampleWe illustrate the above nonlinear model for resourceallocation using a small numeric example.This involves thesame example as considered above in Table1but with:(a)T1=98and T2=90,in fact the same total input resources ascurrently,implying that we are seeking to redeployexisting resources(b)e pq∼E pq meaning0.95E pp≤e pp≤ 1.05E pp,i.e,theefficiencies of each DMU could vary by at most5%(notethat we did not constrain the cross-efficiencies e pq p≠qhere)(c)y ip∼Y ip meaning0.9Y ip≤y ip≤ 1.1Y ip i.e.the targetvalue assigned to output measure i by DMU p could vary by at most10%from its previous observed value(d)x jp∼X jp meaning0.9X jp≤x jp≤ 1.1X jp i.e.the amount ofinput resource j allocated to DMU p could vary by at most 10%from its previous observed value.The results are shown in Table 3.In that table we show the values for the observed time period,with the calculatedvalues for the next time period being shown in brackets.For example DMU1has:(a)observed outputs2and1,target output levels 1.808and1.1(b)observed inputs9and9,allocated inputs8.1and8.1(c)basic DEA efficiency with observed outputs/inputs of0.330,an efficiency from the solution to the resourceallocation model of0.347.In Table3observe that not all of the input resources are allocated.In fact for this example all DMU’s are allocated less input resource.On the output target side some DMU’s have reduced output targets for both outputs(DMU’s4,5,6,7,10); one DMU has increased output targets for both outputs(DMU3); whilst the remaining DMU’s have targets involving increasing one output whilst reducing the other(DMU’s1,2,8,9).4.5DiscussionOur resource allocation model(equations(21)-(34))is an efficiency orientated model,that is the objective function(equation(21))is concerned with maximising efficiency.Plainly we could conceive of circumstances in which we might wish to adopt different orientations,for example,an output orientation(maximise total output)or an input orientation (minimise total input).Consider an output orientation(similar points as are made below can also be made for an input orientation).In the case of just a single output(s=1)we could formulate anoutput orientated resource allocation model as maximise y1p (maximise total output over all DMU’s)subject to equations (22)-(34).However it is more difficult to define"total output"in the case of multiple output measures(probably defined in different units of measurement).One approach to defining total output in the multiple output case that at first sight appears attractive is to use virtual output,i.e.our output orientated resource allocation model would be maximise(u ip y ip)subject to equations (22)-(34).However we believe that this approach is flawed. This is because the weights in a DEA model are not uniquely defined.Typically if{u ip,v jp}are optimal weights than all weights{Ku ip,Kv jp}for any K>1are also optimal(e.g.consider the basic DEA model,equations(8)-(12)).Incorporating u ipinto our objective function leads to two problems:(a)the problem may be unbounded(K approaches infinity)(b)if u ip∼U ip is included to avoid unboundedness we may beimplicitly giving preferential weight to one particularoutput depending upon the(not uniquely defined)valuesof U ip found using the basic DEA model.For these reasons we prefer the efficiency orientated resource allocation model we have presented(equations(21)-(34))with limits imposed(equations(28)and(29))on total output/input values.There is one further point that deserves discussion.It would be natural to assume that if we were to take the calculated input/output levels for each DMU as shown in Table 3and solve the basic DEA model(equations(8)-(12))using these input/output levels we would obtain the sameefficiencies as shown in Table3(as calculated by ourresource allocation model(equations(21)-(34)).In fact,if we do this,we find(for example)an efficiency for DMU3 (target outputs 2.2and 2.2,allocated inputs 6.3and10.8)of 0.609as compared to an efficiency of0.525as given by our resource allocation model.The explanation for this lies in the constraints e pq∼E pq meaning0.95E pp≤e pp≤ 1.05E pp we adopted for our resource allocation model.For DMU3the corresponding constraint was 0.95(0.5)≤e33≤1.05(0.5)i.e.0.475≤e33≤0.525.The key here is that whilst this constraint ensures that there must exist aset of weights for DMU3such that its efficiency lies between 0.475and0.525it does not mean that there cannot exist another set of weights for DMU3such that its efficiency exceeds0.525(recall here that the basic DEA model would maximise the efficiency of DMU3).This situation,where the DMU efficiency values asderived from our resource allocation model are lower bounds on the DMU efficiencies as found using the basic DEA model,willoccur when in the resource allocation model:(a)we have value judgement constraints of the form e pp≤K(for any constant0<K<1)(b)we have any constraints on the weights u ip or v jp(obviously since the basic DEA model allows these weights to be unconstrained).In all other cases the DMU efficiency values as derived from our resource allocation model will equal the DMU efficiencies as found using the basic DEA model.Note here that,in all cases,a DMU which has efficiency one in our resourceallocation model will also have efficiency one in the basic DEA model when evaluated using target outputs and allocated inputs.5.CONCLUSIONSIn this paper we have reinterpreted DEA to mean that weights are chosen simultaneously for all DMU’s so as to maximise total organisational efficiency,i.e.we have reinterpreted DEA as consisting of a single nonlinear program viewed at the organisational level.This organisational level view enabled us to develop nonlinear models for:(a)allocating fixed costs to DMU’s;and(b)allocating resources to DMU’s.In addition we showed how output targets can be decided (indeed in our view must be decided)at the same time as decisions are made about allocating resources.DMU Outputs Inputs 12199 231128 322712 453610 544105 633810 7661210 882146 9161212 103588Table1:Data for numeric exampleDMU Efficiency Fixed cost Fixed costallocation efficiency10.33037.51120.40253.60130.548.02141212.7615196.42160.66372.04171146.26181147.25190.886.92110199.231Total7.6951000.0110Table2:Results for fixed cost allocationNote here that the allocated fixed costs do not add exactly to 1000due to roundingDMU Outputs Inputs Efficiencies 12(1.808)1(1.1)9(8.1)9(8.1)0.330(0.347) 23(2.849)1(1.1)12(10.8)8(7.2)0.402(0.422) 32(2.2)2(2.2)7(6.3)12(10.8)0.5(0.525) 45(4.5)3(2.7)6(5.4)10(9.0)1(1)54(3.6)4(3.6)10(9.0)5(4.5)1(1)63(2.7)3(2.925)8(7.2)10(9.0)0.663(0.696) 76(5.4)6(5.4)12(10.8)10(9.0)1(1)88(7.2)2(2.2)14(12.6)6(5.4)1(1)91(1.1)6(5.755)12(10.8)12(10.8)0.8(0.840) 103(2.7)5(4.5)8(7.2)8(7.2)1(1)Total37(34.057)33(31.480)98(88.2)90(81)7.695(7.830)Table3:Results for resource allocation。
活力之家:伦敦VANS之家

伦敦 V A NS 之家
HoUSE oF V ANS
/ / V L 0/ \ / DO/ \ /
设 计 [ 英] T i m Gr e a t r e x
\
02
工程 名称 : V ANS之 豸
坐落 地点 : 英 国 伦 敦
面 积 2 5 0 0 m
甚 至 提 供 了j 性 。同时 , 橡 胶 地 板 提 供 了一 个 干 净 舒 适 接 照 亮 了拱 形 天 花 板 ,
的平 面 , 与 砖 墙 的 质 感 和 拱 形 天 花 板 形 成 的 专 业 均 匀 照 明 , 但 同时 也 向 人 们 j
了视 觉 上 强 烈 的对 比。
使用 , 创 造 出入 大 教 堂 般 的 空 间 。 同 时 , 在
1 27
美丽 的天 花 板 。
( 编译 :
场地 位于地 下 , 空 间 的 照 明 设 计 就 变 得十分重要 , 不 仅 是 功 能 的体 现 , 同 时 还 需
要 优 雅 地 表 现 隧 道 的 形 式 。 长 线性 的 暖 光 图 片 提 供 : T i m G r e a t r e x 在整 个隧道 、 十 字 路 口的 砖 墙 和 砖 拱 均 有 收 稿 日期 . 2 01 5 . 0 2 . 1 4
不 仅 因为 它 是 V ANS鞋 的 核 心 材 料 , 同 时 动场 地 也 需 要 考 虑 照 明 设 计 。 滑 板 |
更 是 因为 其 耐 久 性 、 天 然 的耐 水 防 滑性 、 利
于 切 割 设 计 图 形 以 及 项 目结 束 时 的 可 回 收 觉 。 户外 金 属 卤化 泛 光 照 明灯 具 的1
TONGUE - HOLDING DEVICE
专利名称:TONGUE - HOLDING DEVICE发明人:DAVIES, Graeme Howard,HUNTLEY,Christopher John,STROUX, Lisa Maria,GREER,Phillip Ronald申请号:EP07712691.0申请日:20070209公开号:EP1981452A1公开日:20081022专利内容由知识产权出版社提供摘要:The present invention provides a device for holding a tongue to hold a person's airway open, for example when a person is unconscious. The device comprises a chamber configured to snugly accommodate a tongue, and a resilient hollow bulb that is in fluid communication with the chamber. The chamber has an open end through which a person's tongue can project. The device is configured such that the deforming and releasing of the bulb creates a reduced pressure in the chamber, thereby retaining the tongue within the chamber. The device prevents the tongue from blocking the airway.申请人:ROYAL COLLEGE OF ART,Davies, Graeme Howard,Huntley, Christopher John,Stroux, Lisa Maria,Greer, Phillip Ronald地址:Kensington Gore London SW7 2EU GB,Royal College of Art, Kensington Gore London SW7 2EU GB,Royal College of Art Kensington Gore London SW7 2EU GB,Royal College of Art Kensington Gore London SW7 2EU GB,Royal College of Art Kensington Gore London SW7 2EU GB国籍:GB,GB,GB,GB,GB代理机构:Hedley, Nicholas James Matthew 更多信息请下载全文后查看。
METHOD FOR THE ANALYSIS OF CELLS
专利名称:METHOD FOR THE ANALYSIS OF CELLS 发明人:KLUG, David,DE MELLO, Andrew,TEMPLAR, Richard,FRENCH, Paul,NEIL, Mark,CES,Oscar,PARKER, Peter, Joseph,Jacques,WILLISON, Keith申请号:GB2005004602申请日:20051201公开号:WO06/059109P1公开日:20060608专利内容由知识产权出版社提供摘要:The present invention provides an improved method of analysing and obtaining reliable data about the plasma membrane of single cells, using a microfluidic cell analyser. The microfluidic cell analyser of the invention comprises a single cell trap, a manipulator arranged to manipulate the outer surface of a cell in the trap, a detection zone in communication with the single cell trap and a detector.申请人:KLUG, David,DE MELLO, Andrew,TEMPLAR, Richard,FRENCH, Paul,NEIL, Mark,CES, Oscar,PARKER, Peter, Joseph, Jacques,WILLISON, Keith地址:Sherfield Building Imperial College London SW7 2QA GB,IC Innovations Limited Sherfield Building Imperial College London SW7 2QA GB,IC Innovations Limited Sherfield Building Imperial College London SW7 2QA GB,IC Innovations Limited Sherfield Building Imperial College London SW7 2QA GB,IC Innovations Limited Sherfield Building Imperial College London SW7 2QA GB,IC Innovations Limited Sherfield Building Imperial College London SW7 2QA GB,IC Innovations Limited Sherfield Building Imperial College London SW7 2QA GB,Cancer Research UK London Research Institute 44 Lincoln's Inn FieldsLondon WC2A 3PX GB,Chester Beatty Laboratories Institute of Cancer Research 237 Fulham Road London SW3 6JB GB国籍:GB,GB,GB,GB,GB,GB,GB,GB,GB代理机构:CROOKS, Elizabeth, Caroline更多信息请下载全文后查看。
各种专业的教师祝福语
各种专业的教师祝福语1. 您慷慨激昂,像妙语连珠的散文诗篇,带领我们挖掘灵感领域。
(语文)学校名称:英国帝国理工学院(伦敦帝国学院)Imperial College London所在位置:英国,学校设置类型:综合性大学创建时间:1907年学历:预科本科研究生学校性质:公立学生人数:12129人院校地址:RegistrySouth Kensington CampusImperial College LondonLondonSW7 2AZ,United Kingdom我将在今后的工作中,不断努力,把人民教师的理想信念、人生寻求和价值观,体现在平常教育教学工作当中,在教育这块沃土上,用爱耕耘,用爱去播种,耕耘不止,战争不已!2. 你才思缜密,像源源不断的数学江流,启发我们拓展不尽奥秘。
(数学)老师,请您接受一份迟到的问候吧!当我初为人师时,我才感受到您曾经为我们的成才付出了多少心血!国庆节到了,老师祝您国庆快乐!3. 您灵活多变,像奇妙活泼的英文字母,带领我们走进无限国度。
(英语)4. 您妙语连珠,像接连不断的知识阶梯,引领我们步入史学殿堂。
(历史)5. 你怀才于心,像纵横世界的探测神眼,引领我们饱览无边河川。
(地理)39:if i could only be with you in my dreams ,baby, well ... i would wantto sleep forever.如果只有在梦里才能和你在一起,那么,宝贝,我宁愿长睡不起。
6. 您博学多识,像亘古流传的星光大道,引领我们探索科学密境。
(物理)日本的现代教育是针对学生身上产生的新问题及时给予指导,变矫治型教育为预防型教育,使学校教育设计成培养健全人格的目标上来。
7. 您深入浅出,有永不浩竭的高深智慧,指引我们永攀科学颠峰。
(化学)9) 将来,无论我成为参天大树,还是低矮的灌木,我都将以生命的翠绿向您祝福,我的老师!在教师节到来之际,祝我亲爱的老师,身体健康!永远快乐!8. 您循循善诱,像层层演变的进化历程,指引我们探索无穷奥秘。
Why the real time formalism doesn't factorise

a rXiv:h ep-ph/9311224v14Nov1993Imperial/TP/93-94/7hep-ph/9311224Why the real time formalism doesn’t factorise ∗A.C.Pearson †Blackett Laboratory,Imperial College,Prince Consort Road,London SW72BZ U.K.Abstract We show that in the real time formalism,the generating functional for thermal Green functions does not factorise.However for most calculations,the normal real time Feynman rules can still be used to give correct results.In this talk,I shall be concerned with the Real Time Formalism (RTF)of equilibrium thermal field theory as described using path integral techniques[1,2,3].In particular,I would like to examine whether or not the partition function factorises into two pieces when using the RTF.This question is crucial to the RTF as it is precisely this factorisation which allows us to describe thermal effects in this formalism using thermal field doublets.Without factorisation we are forced to consider all the real time contour in closer detail[4]or to use another real time contour[4,5].I would like to begin by giving a brief description of what we mean by fac-torisation and the key reasons for our desire to split up the partition function in this way.To do this I shall use a single scalar field as a simple example.The generating functional of thermalGreen functions is given byZ [J ]=exp −ıC V [−ıδ2 C dt C dt ′J (t )∆C (t −t ′)J (t ′) (1)where ∆C (t −t ′)satisfies (2+m 2)∆C (t,t ′)=−δC (t −t ′)subject to the KMS condition [6],and V [φ]is the interaction potential.I have suppressed spatial indices for notational convenience.Thermodynamic information may be obtained from Z [J =0]which is the partition function.The curve,C in the complex time plane is the path associated with the Real Time Formalism (see figure 1).???T −T−ı(1−α)β−T −ıβC 1C 2C 3C 4Im(t)Re(t)Figure 1:Path used for the Real Time Formalism.(T →∞)The motivation behind the development of the RTF was to obtain a con-venient means of extracting dynamical information.The usual imaginary time formalism (ITF)[3,7]was difficult to use for this type of calculation as an an-alytic continuation of the Euclidean green functions to real times was required.Looking at figure 1we see that the sections,C 1and C 2run parallel to the real time axis.As such we can describe the contributions from these sections in terms of a real time parameter.However the vertical sections,C 3and C 4,are more dif-ficult to deal with.If we could ignore the contributions from C 3and C 4we could use only real time arguments in this formalism.The Green functions obtained in this way would also depend only on real times and so unlike the ITF no analytic continuation would be required.In order to be able to ‘ignore’C 3and C 4we must be able to separate their contributions to the generating functional from the those of C 1and C 2;i.e.we would like to factorise the generating functionalZ [J ]=Z 12[J ].Z 34[J ](2)where in Z ab ,all the fields and sources are constrained to lie on C a ⊕C b .Note that we need only consider whether Z 0in Eq.(1)factorises.The interaction term in Z [J ]automatically factorises.Examining Z 0in closer detail we requireC a =1,2dt C b =3,4dt ′J (t )∆C (t,t ′)J (t ′)=0(3)To analyse Eq.(3),we shall write the free propagator for the Klein-Gordon field in its spectral form derived by Mills [8].∆C (t −t ′,ω)= ∞−∞dp 0ρ0(p0)=2π Θ(p0)−Θ(−p0) δ(p2−m2),N(p0)=1‡I have addedǫto the arguments of∆C to show that its form is altered by the introduction of theǫ-prescription.Z [J ]=Z 12[J ].Z 3[J ].Z 4[J ](8)We now make use of the result §,Z12[J =0]=1(9)Eq.(8)now becomesZ [J =0]=Z 3[J =0].Z 4[J =0]or ln Z [J =0]=ln Z 3[J =0]+ln Z 4[J =0](10)Since ln Z is the generating functional of connected diagrams,Eq.(10)states that to calculate a given connected vacuum diagram we need only calculate the two cases where all of the vertices are on C 3or all of the vertices are on C 4.As an example,I shall use the diagram shown below which can be considered to be a contribution to ln Z [J =0].8 d 3k ∆C (t =0,ω) 2.4a =3I aa (11)I ab = C a dt C b dt ′ı∆C (t −t ′,ω=m )(12)Evaluating Eq.(11)we find thatI =λ2m 2+(1−exp(−αβm ))(1−exp(−{1−α}βm ))48 d 3k ∆2C (t =0,ω) 2.ıβ§See ndsmann &Ch.G.van Weert,Eq.(2.4.44)include the contributions from t∈C3,t′∈C4since,in this case∆c(t−t′)=0by virtue of Eq.(5).4KI R=I11+I12+I21+I22=(16)m2where K=(1−exp{−αβm})(1−exp{−(1−α)βm}).If we add these two terms to Eq.(13)then wefind that the RTF gives the same answer as the imaginary time formalism.There are a number of points arising from the calculation of these terms. Firstly,it can be seen that I R is non-zero.Since I R is the full contribution from the C1∪C2section of the RTF contour,we would expect this to be zero because of Eq.(9).The value of I R clearly indicates that Eq.(9)is wrong.Also,I MIX is non-zero which indicates that C3and C4cannot be seperated from C1and C2. This suggests that our use of the asymptotic condition is incorrect.Finally,we note that ifα=0,1,then K=0.This in turn means that I R=0and I MIX=0 as required.In these special cases.the generating functional does factorise since either C3or C4becomes the contour associated with the ITF.From these points we conclude that the RTF does not factorise unlessα=0,1and that should not use the asymptotic condition.2The RTF without the asymptotic conditionIf the RTF does not factorise,we are faced with the fact that we must consider all four sections of the real time contour.The only simplification we can use in our calculations is Eq.(5).With this in mind,I would now like to consider a general Feynman diagram.This diagram will fall into one of two classes:Vacuum diagrams and every thing else(i.e.diagrams with at least one external line).2.1Diagrams with external linesDiagrams of this type have real times associated with the external legs.As such, we may use Eq.(5)to show that we need only consider the contributions from C1and C2.In other words for diagrams with at least one external line,the RTF behaves as if it does factorise and the usual Feynman rules using a doublet of fields applies.I shall be using as a specific example,the diagram shown below. The results derived here apply in general to these types of diagrams.t1t t′t2−λ2=Since t1and t2are real andfinite,we may use Eq.(5)to show that either ∆C(t1−t)or∆C(t′−t2)is zero if t or t′are along C3or C4.This means that we need only consider the curves C1and C2and thatwe can use the normal real-time Feynman rules to evaluate these types of diagrams.2.2Vacuum diagramsFor these types of diagrams,there is no such direct simplification to be made. None of the times arefixed for these diagrams and we must integrate each time over the entire real time contour.The only way to get around this is to use the method described in Evans[10].As afinal point it should be noted that diagrams of this type are associated with static thermodynamic quantities such as the partition function.As such,the imaginary time formalism is much better suited to the evaluation of vacuum diagrams.3What about Evans’real time contour?So far I have talked about the real time formalism described using the con-tour shown infig.1.Recently,another real time contour has been suggested by Evans[5].This contour contains two sections;one along the entire real time axis, the second comes back but with an infinitesimal slope downwards so that we arive at the end a distance−ıβbelow the starting point of the curve.If we use this contour,we recover the usual Feynman rules of the conventional RTF[5].However,we have just shown that the normal Feynman rules break down in certain cases.What has gone wrong is that we have ignored the infinitesimally small gradient of C n2.This gradient is of the order ofβ5AcknowledgementsI would like to thank the organisers of this conference not only for putting together such a useful and friendly meeting,but also for providingfinancial assistance so that I could attend.I would also like to thank T.Evans,my supervisor. References[1]ndsmann&Ch.G.van Weert,Phys.Rep.145(1987)141.[2]A.J.Niemi and G.W.Semenoff,Ann.Phys.152(1984)305;A.J.Niemi andG.W.Semenoff,Nucl.Phys.B220(1984)181.[3]R.J.Rivers,Path Integral Methods in Quantum Field Theory(CambridgeUniversity Press,1987).[4]T.S.Evans and A.C.Pearson,in preperation.[5]T.S.Evans,Phys.Rev.D47(1993)R4196;T.S.Evans,A new time contourfor thermalfield theories,talk given at this conference.[6]R.Kubo,J.Phys.Soc.Japan12(1957)570;P.C.Martin and J.Schwinger,Phys.Rev.115(1959)1342.[7]J.I.Kapusta,Finite Temperature Field Theory(Cambridge University Press,1989);A.Fetter and J.Walecka,Quantum Theory of Many Particle Systems (McGraw-Hill,New York,1972).[8]ls,Propagators for Many-Particle Systems(Gordon&Breach,NewYork,1969).[9]R.J.Furnstahl and B.D.Serot,Phys.Rev.C44(1991)2141.[10]T.S.Evans,Z.Phys.C36(1987)153;ibid41(1988)333.。
, R.J. Needs

In this paper we report an investigation of wavefunction optimization using the method of minimization of the variance of the energy 7]. We have studied three systems: the homogeneous electron gas (HEG), diamond-structure germanium with local pseudopotentials representing the ion cores, and the ground state of the corresponding germanium pseudoatom. Homogeneous systems are important in condensed matter theory because they are the simplest extended systems and they serve as a good testing ground for more realistic systems. We have developed a correlated wavefunction for the HEG which is accurate and allows for e cient optimization and rapid evaluation within a QMC calculation. We have used the electron correlation function developed for the HEG in calculations on diamondstructure germanium, adding a one-body term to introduce additional variational freedom in the charge density. Finally, we have studied the germanium pseudo-atom. The issue of most interest here is whether employing wavefunctions of similar exibility in the pseudoatom and pseudo-solid results in a large enough cancellation of errors to give a good value of the cohesive energy. For each of the three systems studied, the accuracy of the optimized wavefunctions is gauged by comparing with DMC results obtained using the optimized wavefunctions as guiding functions.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Approach to a Theory of Software Process and Software Evolution- Position Paper -FEAST 2000 Workshop10 - 12 July 2000Imperial CollegeLondon SW7 2BZM M LehmanDepartment of ComputingImperial CollegeLondon SW7 2PH+44 (0)20 7594 8214mml@http://www-dse. /~mml/Three FEAST workshops were held at Imperial College during 1994/5 [fea94/5] to explore the FEAST hypothesis, itself formulated in 1993 [leh94]. The FEAST/1 project (1996 - 8) [leh95] funded by EPSRC followed and led, in turn, to FEAST/2 (1999 - 2001) [leh98]. Many of the results of these studies have been published over the past few years. They may be found on the FEAST web site at http://www-dse. /~mml/feast.As part of their investigation, the projects obtained evolution data on a number of systems from the formal collaborators, ICL, Logica, Matra-BAE and MoD-DERA and BT (FEAST/2). Similar data was also received from Lucent Technologies through the good offices of Pro fessor Dewayne Perry, who, together with Professor Wlad Turski, are EPSRC Senior Visiting Fellows to the projects. The release-based systems studied had each been evolved in a sequence of from 15 to 30 releases over some eight to twenty years. Models and analysis of the data and interpretation of the results revealed striking similarities in the evolutionary patterns and long term trends of these systems. Moreover the newly observed patterns and trends were strikingly similar to those of OS/360 and several other systems studied in the 70s [leh98b]. This despite the fact that the systems studied were developed and evolved by different organisations, addressed different application areas and implemented distinct architectures using different languages. Moreover the systems studied differed in their size by up to two orders of magnitude and in the number of persons involved in their evolution by even more. Since the day to day control of the evolution process was in the hands of humans, differences between the several systems in their short term evolutionary behaviour were to be expected. The similarity of their long term behaviour, however, would have come as a surprise had not the 70s and 80 interpretation of the initial OS/360 observations, their subsequent phenomenological interpretation and the encapsulation of the observations and their interpretations in a set of laws of software evolution [leh74,78,80,96] prepared the investigators for such commonality. Thus the FEAST/1 results were seen as further support for six of the eight laws and supported many of the other conclusions that had been reached. The new evidence did, however, suggest some minor changes to the wording of the laws [leh98b].As the laws developed over a period of fifteen years no thought was given to any relationship between them. The observed behaviour was regarded as characterising industrial team development and maintenance of software systems. The signs of self-stabilisation and other aspects of the evolutionary behaviour were regarded as symptomatic of the behaviour of a feedback system [bel72, leh78]. The latter observation was ultimately expressed in the formulation of the eighth - Feedback – law and, some time later, the FEAST hypothesis [leh94]. But even then the set of eight were still regarded just as that, a set of eight independent, behaviour based, statements derived from observation of the real world. It was only with formulation of the FEAST hypothesis that realisation struck: the set of eight laws were likely to prove inter-related with the first seven reflecting facts that the eighth appeared to abstract. Over the years, the laws were subjected to a number of criticisms. In particular, it was felt that the statements did not include precise definitions or statements of assumptions. Moreover, presenting themas “laws” appeared questionable to some. The alternative view saw them as relating to organisational and sociological factors that lay outside the realm of software engineering, outside the responsibility of software engineers. Hence, from the point of view of the latter, they must be regarded as laws. As time passed and, in particular, with the pursuit of the FEAST projects, continuing discussions between those involved led to increased understanding and insight of the process and of the evolution phenomenon. It became more and more evident that the laws share underlying concepts and assumptions. Thus an overall challenge arose. Can the accumulated knowledge and understanding be developed into or be shown to be, the basis for, or a part of, a theory defined, for example, as a “set of reasoned ideas intended to explain facts or events” [oxf89]. And this led to the question, “is the role of feedback in the process a key to the development of a theory of software evolution?”Exploration of the FEAST hypothesis, determination of the structure and nature of the relationship between the laws and development of a theory as posited poses many challenges. Difficulties arise, for example from the non-linear nature of the software process, from the major role that humans play in defining it and in its control and execution and from the lack of accurate models of process behaviour. It appears, however, that the time may be ripe for the development of a theoretical base and framework for a theory, of software evolution. Based on the insights gained in pursuit of the FEAST investigation and believing that the answer is “yes” we propose to initiate such a development. The first step adopts the classical approach of identifying and stating (in natural language) a series of definitions and axioms, based on which theorems may be derived and proven. Statements not initially proven may be retained as hypotheses until formally proven or rejected by means of a counter example or otherwise. Eventually, or in parallel, one seeks to develop a fully formal representation of the theory.This work has now begun and a first outline is being prepared. As an illustration of the approach, some initial axioms and theorems are stated below. As presented here, they do not, and are not intended to, constitute even an elementary theory. They are provided to generate wider interest; to trigger comments and an injection of ideas from the workshop participants. Further tentative results are available as “work in progress”, but the availability of a theory that is coherent, complete in some sense, and satisfying, is some way off.Def. 1.:An S-type program (software system) is an executable model of a formal specification [leh85].Note 1:That is: the specification of an S-type program is a formal theory and its implementation is a model of that theory [tur81,87].Note 2:Successful verification demonstrates that the program satisfies the specification, that it is correct.Note1 3:All properties (attributes) defined by such a specification are properties of the program. Note 4:Properties not addressed in the specification are of no concern and may or may not appear in the implementation.Note 5:Interest in the program derives from the fact that it is believed that possession of these properties guarantees desired behaviour of the program in execution.Def. 2An E-type program (software system) is a model, (also termed an implementation) of a specification. The specification has a further model which is an abstraction of the realworld.Note 6:For an E-type program, all properties defined by the specification are properties of the program.Note 7:Properties not addressed in the specification are, by definition, of no concern and may or may not appear in the implementation.Note 8:Interest in the program d erives from the fact that it is believed that these properties will ensure the desired behaviour of the program in execution in a designated portion of thereal world.1“Notes”,while presently informal and for clarification, may be formalised and become axioms, theorems, or corollaries as development proceedsNote 9:Conceptually, the real world may be partitioned into different domains, each possessing, in general, an infinite number of attributes.Axiom I:The abstraction of the real world that is the defining model of the specification of an E–type program has an infinite number of attributes.Note 10:The real world is also a model of the specification [leh84,tur00].Note 11:The defining model that abstracts the features of interest from the real world which are applied to the development of the specification must be shown to be satisfactory inrelation to the real world. Its being a model of the specification is a means to achieve suchsatisfaction.Axiom II The implementation (also a model of the specification) is finite.Note 12:When E-type software executes in the real world, the domain of execution (the operational domain) must remain consistent with the abstraction that is the defining modelof the specification if the program is to execute satisfactorily at all times.Theorem2 1Every E-type program is essentially incomplete in the sense that there will exist infinite sets of real world properties that are not reflected in the implementation.Def. 3:The exclusion, conscious or otherwise, implicit or explicit, of an attribute of the real world from the specification is an assumption.Def. 4:An assumption reflected in a specification is invalid if the E-type program derived from the specification is considered unsatisfactory by human observers for reasons associatedwith that assumption.Note 13:The real world is dynamic, always changing.Theorem 2As the real world changes, assumptions as reflected in the specification may become invalid. This may cause the real world to no longer be a model of the specification. Theorem 3An implementation which is a model of a specification which does not have the real world as a model is unsatisfactory.Axiom III The real world is dynamic and undergoes continuing change.Theorem 4The rate of change of the real world is, in general, accelerated by installation and use (execution) of an E-type program.Theorem 5The behaviour of a program when it is executed is inherently uncertain, that is, it cannot be guaranteed to be satisfactory.Note 14Theorem 5 and related behaviour has previously been referred to as the Software Uncertainty Principle [89,90].Etc., etc.The above is intended to do no more than to provide a preliminary introduction, extracted from work in progress and intended to illustrate an approach currently under development. If it can be successfully and convincingly completed, the resultant should make a significant contribution to providing software engineering technology with the theoretical foundations and framework needed to support further process and technology improvement. Expressing the theory in an appropriate formalism will represent a further advance. The present development is a first, essential, step to achieve this outcome. AcknowledgementsMy sincere thanks are due to my colleagues Juan Ramil, Dr Goel Kahen and Siew Lim for their support, questioning and constructive criticism and to Professor Wlad M Turski for many hours of discussion and much enlightenment.References[bel72]Belady LA and Lehman MM, An Introduction to Growth Dynamics, Proc. Conf. on Statistical Computer Performance Evaluation, Brown Univ., 1971, Academic Press, 1972, W Freiberger (ed.), pp. 503 -5112 Proofs of theorems are not included in the present paper[leh74]Programs, Cities, Students, Limits to Growth?, Inaugural Lecture, May 1974. Publ. in Imp.Col of Sc. Tech. Inaugural Lect. Se., v. 9, 1970, 1974, pp. 211 - 229. Also in ProgrammingMethodology, (D Gries ed.), Springer Verlag, 1978, pp. 42 - 62[fea94,5]Preprints of the three FEAST Workshops, MM Lehman (ed.), Dept. of Comp., ICSTM, 1994/5[leh78]Lehman MM, Laws of Program Evolution - Rules and Tools for Programming Management, Proc. Infotech State of the Art Conf., Why Software Projects Fail, - April 9-111978, pp. 11/1 - 11/25[leh80a]Lehman MM, On Understanding Laws, Evolution and Conservation in the Large Program Life Cycle, J. of Sys. and Softw., v. 1, n. 3, 1980, pp. 213 - 221[leh80b]Lehman MM, Programs, Life Cycles and Laws of Software Evolution, Proc. IEEE Spec..Issue on Softw. Eng., v. 68, n. 9, Sept. 1980, pp. 1060 - 1076[leh84]id., A Further Model of Coherent Programming Models, in, Proce eding of the Software Process Workshop, Potts C (ed), Egham, Surrey, UK, Feb. 1984. IEEE cat. no. 84CH2044-6, Comp. Soc., Washington D.C., order n. 587, Feb. 1984, pp. 27 -35[leh89]id., Uncertainty in Computer Application and its Control through the Engineering of Software, J. of Software Maintenance, Research and Practice, vol. 1, 1 September 1989, pp. 3 - 27 [leh90]id., Uncertainty in Computer Application, Technical Letter, CACM, vol. 33, no. 5, pp. 584, May 1990[leh94]id., Feedback in the Software Evolution Process, Keynote Address, CSR Eleventh Annual Workshop on Software Evolution: Models and Metrics. Dublin, 7 - 9th Sept. 1994, WorkshopProc., Information and Software Technology, spec. iss. on Software Maintenance, v. 38, n.11, 1996, Elsevier, 1996, pp. 681 – 686[leh95]Lehman MM and Stenning V, FEAST/1 - Feedback, Evolution And Software Technology;Case for Support, EPSRC Research Proposal, parts 1-3, Dept. of Comp., ICSTM, March1996[leh96]Lehman MM, Laws of Software Evolution Revisited, Position Paper, EWSPT96, Oct. 1996, LNCS 1149, Springer Verlag, 1997, pp. 108 - 124[leh98a]id., FEAST/2 - Case for Support, EPSRC Research Proposal, parts 1-3, Dept. of Comp., ICSTM, Jul. 1998[leh98b]Lehman MM and Ramil JF, Feedback, Evolution And Software Technology, Keynote Lect., Proc. Int. Conf. on Softw. Eng. and its Applications, Session 1, Paris, 8 -10 Dec. 1998, pp. 1 - 12[oxf89]Oxford Advanced Learner’s Dictionary, Oxford University Press, 1989[tur81]Turski W M, Specification as a Theory with Models in the Computer World and in the Real World, System Design, Infotech State of the Art Report (P Henderson ed), se. 9, n. 6, 1981,pp 363 - 377[tur87]Turski WM, and Maibaum T, The Specification of Computer Programs, Addison Wesley, London, 1987, p. 278[tur00]Turski WM, An Essay on Software Engineering at the Turn of the Century, Invited Talk, ETAPS, Berlin, March, 2000。