当前位置
百度地图经纬度查询定位查询方法

百度地图经纬度查询定位查询方法1. 什么是经纬度查询经纬度查询是一种通过经度和纬度坐标来确定和查询位置的方法。
经度指地球表面上某个地方与本初子午线的夹角,纬度则是指地球表面上某个地点与赤道之间的夹角。
百度地图提供了经纬度查询功能,可以通过输入经纬度坐标来获取该位置的具体信息,如地址、周边的地标和景点等。
2. 使用百度地图进行经纬度查询的方法步骤步骤一:访问百度地图首先,在浏览器中打开百度地图的网页或者使用百度地图的手机应用程序。
步骤二:进入经纬度查询页面在百度地图的界面上,点击或者搜索框中输入“经纬度查询”进行搜索。
在搜索结果中选择“经纬度查询”进入该页面。
步骤三:输入经纬度坐标在经纬度查询页面,输入需要查询的经纬度坐标。
经度的范围是-180到180,纬度的范围是-90到90。
可以在输入框中直接输入经纬度坐标,或者使用鼠标点击地图上的位置来获取经纬度坐标。
步骤四:查询位置信息输入经纬度坐标后,点击“查询”按钮进行查询。
百度地图会根据提供的经纬度坐标,显示该位置的具体信息,如地址、周边的地标和景点等。
步骤五:查看周边地图除了显示位置的具体信息,百度地图还可以提供该位置周边的地图。
用户可以根据需要,放大、缩小、平移地图,查看周边的街道、建筑物等详细信息。
3. 经纬度查询的应用场景经纬度查询在很多场景中都有广泛的应用,例如:•在旅行中,通过经纬度查询可以快速确定目的地的位置信息,更好地规划行程。
•在地理学研究中,经纬度查询可以帮助确定某个地点的准确坐标,以支持地理数据分析和统计。
•在商业活动中,经纬度查询可以用于确定特定位置的周边商户和服务设施,方便用户进行选择和比较。
总结:经纬度查询是一种通过经度和纬度坐标来确定和查询位置的方法。
使用百度地图进行经纬度查询只需几个简单的步骤,可以提供准确的位置信息和周边地图。
经纬度查询在旅行、地理学研究和商业活动等领域都有广泛的应用。
十年SOA:当前的位置和未来的方向

十年过 去了 ,我们 仍然在 纠结于 服 务或者基 于We 的对 象的含义 ,甚 b 至 不去考虑S OA曾经对信 息系统 建设 是 多么 的重 要 。在 本文 中你 将看 到国
内外专家对S OA的 发 展 历 程 、现 状 以
及未来的深入讨论 。
112 程 序员
经 明确成 为一个 招牌 ,许 多大厂商 已
已 经 有 + 余 年 的 发 展 历 程 。 现 在 , 也 许 很 少 会 有 人 记 得 微 软 Bz ak 务 iT I服
器 , 它 曾 经 是 S P、WS 和 U I OA DL DD
“ 启蒙的斜坡 ”。 J f :细察SO e A,您会发现其本 质 非常类似于8 年代 就已经完 成的功 0 能设 计和 构造 。如果我们 根据 已经 了 解 的事实 ,回顾过 去并对 未来 进行预
D v oa d r 自 a e公 司,S 资深专家 a eH ln e:来 S b r l OA
Wi 日 a l  ̄m K _ m:来 自 r nWa o l rv l Cal g nt a e公司 s o i T
毛新 生 : IM 中 国开 发 中心CT B 0
胡键 :lf Q 中文 站S no oA社 区资 深 编辑 刘金 柱 : 北 京 炎黄 盈 动 公 司CE O
年,最让 我感到 吃惊 的是 ,尽 管众 多 厂商和技 术大 牛们绞尽脑 汁地 告诉人
们 什 么是 S OA, 仍 有 很 多 公 司 认 为
We 服 务就是S b OA。而那 些已经走上
S O A (S e r vi ce一 r e d 0 i nt e
经深入 人心 ,成 为主流 的的争吵从 未结
Etrr eI nepi s 企业开发
查询自己位置的方法

查询自己位置的方法
要查询自己的位置,有几种常见的方法可以使用。
首先,你可以使用全球定位系统(GPS)来确定你的精确位置。
现代智能手机通常都配备了GPS功能,你可以在手机设置中开启位置服务,然后使用地图应用来查看你所在的位置。
另外,如果你在室内或者GPS信号较弱的地方,也可以使用Wi-Fi定位或蓝牙定位来获取大致的位置信息。
这些定位方法依赖于周围的Wi-Fi网络或蓝牙信号来确定你的大致位置。
除了使用手机和相关应用程序外,还可以使用互联网浏览器来查询自己的位置。
许多网站和服务提供了IP地址定位功能,通过分析你的IP地址来确定你大概所在的地理位置。
但这种方法的精确度可能不如GPS定位准确。
此外,一些应用程序和社交媒体平台也允许你分享你的实时位置信息,比如通过发布帖子或者发送位置共享链接的方式来告诉别人你的位置。
总的来说,要查询自己的位置,可以使用GPS定位、Wi-Fi定位、蓝牙定位、IP地址定位等多种方法,具体选择哪种方法取决于
你的设备和使用场景。
在使用任何定位功能时,务必注意隐私和安全问题,确保你的位置信息只被需要知道的人或机构获取。
如何察看机器人当前的位置信息
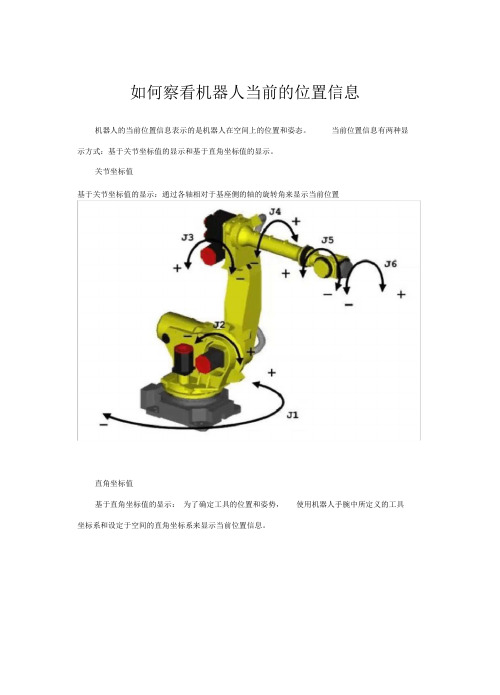
如何察看机器人当前的位置信息机器人的当前位置信息表示的是机器人在空间上的位置和姿态。
当前位置信息有两种显示方式:基于关节坐标值的显示和基于直角坐标值的显示。
关节坐标值基于关节坐标值的显示:通过各轴相对于基座侧的轴的旋转角来显示当前位置直角坐标值基于直角坐标值的显示:为了确定工具的位置和姿势,使用机器人手腕中所定义的工具坐标系和设定于空间的直角坐标系来显示当前位置信息。
Y \ 世界坐标系用户坐标系1此处以R-2000iB/165F为例,如何才能显示机器人的当前位置呢?步骤1:按下【MENU】(菜单)键,显示画面菜单。
MENU 11UTILITIES2TEST CYCLE3MANUAL FCTNS4ALARM >5I/O >€SETUP >7 FILE >LJLL 9 USER0 -- NEXT —■步骤2 :选择“ 0 —— NEXT ——”,选择后续菜单的“ 5 4D GRAPHICS ”SELECT EDIT DATA STATUSSYSTEM USER2 BROWSERNEXT步骤3 :按下F1【类型】,选择“ 2 Position Display ”。
显示当前位置界面2 Position Di-splay方法2 按下POSN (位置显示)键也可以显示当前位置界面。
N<c12 3 4① 要显示关节坐标值,按下 F2 “ JNT (关节坐标)”②要显示用户坐标值,按下 F3 “ USER (用户坐标)Conf iguraNUT, 01 0, 0X : 1592.000 y: -.002 z: 735.000w:.000 p:-000 r:* 000User Frame : 0 Tool: 1100%Toolw002 000 ③ 要显示世界坐标值,按下 F4 “ WORLD (世界坐标)Configura 七ion: N U x:1592,000 y: 000 p: 735.000.000JOINTPOSITIONBusy S 咖 Hold.1J Run 吕 I/C ProdLX3 LINE 0 ikU'ro ABORTED[TYPE ]JNT USER WORLD。
如何在百度地图上精确定位自己的地理位置

如何在百度地图上精确定位自己的地理位置
方法/步骤使用百度地图精准定位经纬度坐标的方法如何在百度地图上精确定位自己的地理位置,很多朋友都不是很清楚。
小空在使用百度地图的过程中有一些经验体会,愿与大家分享,以方便大家可以精确的定位自己地理位置,少走弯路。
打开百度地图“坐标拾取系统”:输入网址”/lbsapi/getpoint/index.html“,进入”坐标拾取系统“ 进入”坐标拾取系统“后,就可以方便的查询自己的精准地理信息了,我们以”海尔工业园“为例,寻找它的详细坐标。
在搜索栏输入“海尔工业园”点击搜索,如图,就会在地图上出现相应的标记,点击你要找的某一个,就能看到相应的坐标进入地图的界面后,会看到地图页面上有个蓝色的光标,那就是地图定位的位置,点击下光标,在界面底下就会弹出来“我的位置”了,然后就可以看到当前的地理位置了。
kuka获取当前位置函数 -回复
kuka获取当前位置函数-回复KUKA获取当前位置函数是工业机器人控制系统中的一个重要功能。
通过这个函数,机器人可以准确地获取自己当前所处的位置信息,从而能够执行下一步的动作计划。
本文将以KUKA获取当前位置函数为主题,从理论到实践,逐步详细介绍这个函数的相关知识。
第一步,我们先来了解KUKA机器人系统以及位置信息的概念。
KUKA是一家德国著名的工业机器人制造商,其机器人系统在汽车制造、工业生产等领域得到广泛应用。
而机器人的位置通常由其坐标系和各个关节的角度组成。
坐标系可以理解为一个三维空间中的点,而关节角度则是机器人各个关节的旋转角度。
机器人的位置信息对于完成各种工业任务非常关键,因此可以说获取当前位置函数是整个机器人控制系统的基础。
第二步,我们来了解KUKA获取当前位置函数的编程方式。
在KUKA机器人系统中,机器人的控制是通过编程语言完成的。
KUKA的编程语言主要有KRL和KUKA Sunrise等。
对于获取当前位置函数而言,我们需要使用KRL语言中的Prc_pose函数。
Prc_pose函数可以将机器人当前的位置信息保存在一个结构体中,通过调用这个函数并传入所需参数,我们就可以获取到机器人当前的位置信息。
第三步,我们来详细了解Prc_pose函数的使用方法。
Prc_pose函数需要传入两个参数:目标存储变量和运动学变量。
目标存储变量是一个结构体类型的变量,用于保存机器人的位置信息。
而运动学变量则是机器人的欧拉角(RPY角度)或者四元数。
在调用Prc_pose函数时,我们需要将目标存储变量和运动学变量作为参数传入,并在函数的返回值中获取机器人的位置信息。
第四步,我们进一步了解Prc_pose函数的参数及返回值。
目标存储变量有多种定义方式,可以是一个数组、一般数组、结构体等,根据具体需要来选择。
而运动学变量可以是旋转矩阵、角度、欧拉角或四元数。
函数的返回值是一个布尔类型,表示Prc_pose函数是否执行成功。
ftell返回指针在文件流中的当前位置

文章题目:深入探讨ftell返回指针在文件流中的当前位置一、引言在计算机编程中,文件操作是一个非常重要的主题。
在文件操作中,经常需要获取文件指针在文件流中的位置。
而在C语言中,我们可以通过ftell函数来实现这一目的。
本文将深入探讨ftell函数返回指针在文件流中的当前位置,以帮助读者更好地理解和运用这一重要的功能。
二、ftell函数的基本概念让我们来了解一下ftell函数的基本概念。
ftell函数是C语言标准库中的一个函数,其作用是返回文件指针在文件流中的当前位置。
通俗地讲,就是告诉我们文件指针当前所处的位置是距离文件起始位置多少个字节。
这个概念对于文件操作非常重要,因为我们经常需要在文件中定位,读取或写入特定位置的数据。
三、ftell函数的使用方法接下来,让我们学习一下ftell函数的使用方法。
在C语言中,我们可以通过以下方式来使用ftell函数:```clong int ftell(FILE *stream);```其中,stream是一个文件指针,指向我们要获取位置的文件流。
而ftell函数的返回值是一个长整型,表示文件指针在文件流中的当前位置。
举个简单的例子,我们可以这样使用ftell函数:```clong int position = ftell(file);printf("当前文件指针位置:%ld\n", position);```通过上面的代码,我们就可以获取文件指针在文件流中的当前位置,并进行打印输出。
四、ftell函数的深度理解现在,让我们深入理解ftell函数的内部原理。
在C语言中,文件指针的位置是以字节为单位进行计算的。
当我们打开一个文件进行读写操作时,文件指针初始位置通常是在文件的起始位置。
随着读写操作的进行,文件指针会不断地向后移动,指向已经读写过的数据的末尾。
而ftell函数的作用,就是告诉我们文件指针在文件流中的当前位置到底距离文件的开头多远。
几种获取当前地理位置信息的方法

几种获取当前地理位置信息的方法获取当前地理位置信息是一种常见且有实际应用的需求。
本文将介绍几种获取当前地理位置信息的方法,包括使用GPS定位、使用WiFi定位、使用基站定位、使用IP定位和使用传感器定位等几种常见的方法。
一、GPS定位GPS定位是一种通过卫星定位系统确定地理位置的方法。
现代智能手机中都内置了GPS芯片,可以通过访问该芯片获取当前地理位置信息。
GPS定位的原理是通过接收来自多颗卫星的信号并计算其与手机之间的距离,再通过三边测量的方法确定手机的精确位置。
GPS定位的精度相对较高,在户外环境下可以达到几米甚至更小的范围。
但在室内环境或高楼大厦附近等复杂环境下,GPS信号可能受到干扰导致定位不准确。
二、WiFi定位WiFi定位是一种通过手机接入的WiFi网络来确定地理位置的方法。
WiFi定位的原理是通过手机扫描周围的WiFi信号,获取到一些已知位置的WiFi热点的位置信息,然后根据手机与这些热点之间的信号强度和距离来进行定位计算。
WiFi定位的精度较高,可以达到几十米的范围,但依赖于已知位置的WiFi热点信息,所以在一些偏远地区或新建地区可能无法提供准确的定位结果。
三、基站定位基站定位是一种通过手机与周围基站之间的信号交互来确定地理位置的方法。
基站定位的原理是手机与周围的基站进行通信,基站会记录手机与其之间的信号强度,并将这些信息发送给位置服务器进行计算。
通过计算手机与多个基站之间的信号强度和距离,可以确定手机的位置。
基站定位相对于GPS定位和WiFi定位来说,精度较差,通常在几百米到几千米的范围内。
四、IP定位IP定位是一种通过IP地址来确定地理位置的方法。
每个手机或电脑在连接互联网时都会被分配一个独立的IP地址,而IP地址通常与地理位置有一定的关联。
IP定位的原理是通过查询IP地址与位置信息的映射关系数据库,将IP地址对应的地理位置信息返回给用户。
IP定位的精度相对较差,通常在几十到几百公里的范围内。
怎样定位自己的位置
怎样定位自己的位置
你可以使用以下方法定位自己的位置:
1. 使用GPS定位:在智能手机或导航设备上启用GPS功能,并打开地图应用或导航应用,它们将会显示你的当前位置。
2. 使用Wi-Fi定位:Wi-Fi定位是通过检测附近的Wi-Fi信号来确定你的位置。
启用Wi-Fi功能并打开地图应用,它会自动使用Wi-Fi定位来显示你所在的位置。
3. 使用移动数据定位:移动数据定位是通过检测你所连接的移动网络信号来确定你的位置。
打开地图应用,它将会使用移动数据定位来显示你的位置。
4. 使用IP定位:当你连接到互联网时,你的设备会分配一个IP地址。
地图应用可以使用这个IP地址来大致确定你的位置。
5. 使用地标定位:观察周围的地标,如建筑物、街道、商店等,然后使用地图应用进行搜索,它们将会显示与你所观察到的地标相匹配的位置。
请注意,以上方法的准确度会有所不同。
GPS定位通常是最准确的,但在室内或高楼大厦周围可能会受到干扰。
而使用Wi-Fi、移动数据或IP定位可能会更容易受到误导。
js获取用户当前地理位置(省、市、经纬度)

js获取⽤户当前地理位置(省、市、经纬度)在很多情况下,我们需要⽤到定位功能,来获取⽤户当前位置。
当前⽐较流⾏的定位API有腾讯地图、百度地图、⾼德地图、搜狗地图等等,在这⾥我使⽤的是腾讯地图定位API,根据⽤户IP获取⽤户当前位置,API返回结果详细到区⼀级,包涵经纬度。
⼀、腾讯地图极简的定位API——IP定位1.1请求参数(如下图所⽰): 返回参数(如下图所⽰):1.2IP定位的优缺点:优点:极简,易懂。
不需要⽤户地理位置授权,不需要引⽤插件,⼀个ajax完全搞定。
缺点:定位不准确,虽说可定位到区⼀级,但实际上⼀般只能定位到市⼀级,偶尔还只能定位到省⼀级,此时就要⽤到⼿动定位了。
1.3⽰例(此处的开发密钥是我已经在腾讯申请好了的,若要引⽤,烦请去腾讯申请,申请流程很简单。
)1.31 jquery实现IP定位<!DOCTYPE html><html><head><meta charset="UTF-8"><title>腾讯定位-jquery</title><meta content="width=device-width,height=device-height,initial-scale=1.0,maximum-scale=1.0,user-scalable=no" name="viewport"><script src="/ajax/libs/jquery/1.8.0/jquery.min.js"></script><!-- 引⽤⾕歌jQuery --></head><body></body><script type="text/javascript">$.ajax({type: "get",//接⼝规定,只能⽤getasync: true,//异步url: "https:///ws/location/v1/ip",//接⼝地址data: {"key":"PTMBZ-GCQLW-SC2RG-R2FNI-HWPNQ-4PBQM","output":"jsonp"},//参数格式必须⽤到output传参为jsonp,否则会报跨域问题dataType: "jsonp",//跨域,必须⽤到jsonpsuccess: function(result){console.log(JSON.stringify(result));document.write(JSON.stringify(result));},error: function (XMLHttpRequest,textStatus,errorThrown){console.log(JSON.stringify(XMLHttpRequest));document.write(JSON.stringify(XMLHttpRequest));}});</script></html>1.32 angularjs实现IP定位<!DOCTYPE html><html><head><meta charset="UTF-8"><title>腾讯定位-ng</title><meta content="width=device-width,height=device-height,initial-scale=1.0,maximum-scale=1.0,user-scalable=no" name="viewport"><script src="/libs/angular.js/1.4.6/angular.min.js"></script><!-- 引⽤angularjs --></head><body ng-app="myApp" ng-controller="getIPControl">{{loaction}}</body><script type="text/javascript">var app = angular.module("myApp", []);//获取ip地址app.controller("getIPControl",function($scope,$http){$scope.loaction;//位置信息QQmap = function(res){//腾讯定位返回函数,函数名只能为QQmapconsole.log(res);$scope.loaction = res;//渲染位置信息};//腾讯根据ip⾃动定位,QQmap为腾讯jsonp格式返回函数名,PTMBZ-GCQLW-SC2RG-R2FNI-HWPNQ-4PBQM为腾讯开发秘钥$http.jsonp("https:///ws/location/v1/ip?jsonp=QQmap&key=PTMBZ-GCQLW-SC2RG-R2FNI-HWPNQ-4PBQM&output=jsonp");});</script></html>⼆、腾讯地图精准定位API——前端定位组件2.1请求参数返回参数:2.2前端定位组件的优点:定位精准,⼀般能获取到区⼀级信息,只有偶尔获取不到。
当前位置_精品文档

当前位置在现代社会中,我们常常听到关于定位的词汇,比如GPS定位、导航定位等。
这些技术能够精确地确定一个物体或个体在空间中的具体位置。
然而,在我们生活的这个世界上,不仅仅是物体和人类可以被定位,许多其他方面也需要定位,比如社会地位、职业发展等等。
无论是在物理空间中还是在社会关系中,我们都会时不时地思考自己当前的位置,这对我们来说非常重要。
在物理空间中,定位技术的发展和普及使得我们能够更轻松地找到目的地。
无论是步行、开车还是乘坐公共交通工具,我们都可以通过手机上的导航软件获得具体的路线指引。
这种定位技术的发展不仅节省了我们的时间和精力,还让我们更加安全和便捷地到达目的地。
例如,如果我们正在一个陌生的城市旅行,只需打开手机上的地图应用,就可以准确地知道自己所处的位置,并找到最佳的路径前往目的地。
定位技术的应用范围也不仅仅局限在导航上,还包括地图绘制、测绘、卫星通信等领域,为我们的生活提供了各种便利。
除了物理空间的定位,我们还需要时刻关注自己在社会关系中的位置。
社会地位是人们在社会中所拥有的地位和身份。
无论是在家庭、工作场所还是社区,我们都相对于他人拥有一定的社会地位。
这种社会地位经常会影响到我们在这些场合中的处境和待遇。
例如,在工作场所,一个职位的高低直接决定了相应的权力和待遇。
社会地位的定位既是一个社会现象,也是一个个人发展的重要因素。
在社会地位的定位中,我们需要不断努力提高自己的能力和价值,以获得更好的地位和机会。
职业发展也需要我们对自己当前位置的认知和思考。
每个人都有自己的职业发展目标,而这个目标的实现需要我们不断地思考和调整自己的当前状态。
我们需要明确自己目前所处的职业定位,以及与目标之间的差距。
通过对当前位置的认识,我们可以更好地制定发展计划,并采取相应的行动。
在职业发展过程中,我们可能会面临许多选择和机遇,定位的准确性决定了我们是否能够抓住这些机会并取得更好的成就。
总之,无论是在物理空间中还是在社会关系中,当前位置都对我们非常重要。
三轴伺服电机获取x轴当前位置的方法
三轴伺服电机获取x轴当前位置的方法
获取三轴伺服电机x轴当前位置的方法, 可使用编码器进行实
时测量和反馈。
编码器是一种能够将旋转位置转换为电信号的装置。
通过连接在电机轴上,可以实时测量电机的旋转角度和位置,并将这些信息反馈给控制系统。
在伺服控制系统中,编码器通常与反馈控制器或运动控制器连接,通过读取编码器的信号,控制电机的转动和精确定位。
具体而言,获取x轴当前位置的步骤如下:
1. 将编码器连接到电机轴。
通常,编码器会与电机轴同步安装,使其能够与电机一起旋转。
2. 将编码器的反馈信号连接到反馈控制器或运动控制器。
这些设备负责读取和处理编码器的信号,并将其转换为电机的位置信息。
3. 在控制系统中,使用合适的编程语言或软件库,调用相应的函数或方法来获取电机x轴的当前位置。
具体的方法可能因控制系统的不同而有所不同。
一般来说,常见的控制系统提供了读取编码器信号的函数或方法,通过调用这些函数或方法,可以获取电机x轴的当前位置,并将其用于控制和定位应用中。
需要注意的是,获取x轴当前位置的精度和准确度受到编码器分辨率、控制系统的采样率等因素的影响。
在实际应用中,可能还需要考虑和处理一些常见的误差源,如机械间隙、滞后等。
几种获取当前地理位置信息的方法
⼏种获取当前地理位置信息的⽅法1.html5 ⾃带获取当前地理位置信息//获取当前经纬度 IOS 10 获取定位信息只⽀持https 请求所以以下⽅法不适⽤// navigator.geolocation.getCurrentPosition( // 该函数有如下三个参数// function (pos) { // 如果成果则执⾏该回调函数// la = pos.coords.longitude;// lg = titude;// console.log(pos.coords.longitude);// console.log(titude);// //alert(// // ' 经度:' + titude +// // ' 纬度:' + pos.coords.longitude +// // ' ⾼度:' + pos.coords.altitude +// // ' 精确度(经纬):' + pos.coords.accuracy +// // ' 精确度(⾼度):' + pos.coords.altitudeAccuracy +// // ' 速度:' + pos.coords.speed// //);// }, function (err) { // 如果失败则执⾏该回调函数// alert(err.message);// }, { // 附带参数// enableHighAccuracy: true, // 提⾼精度(耗费资源)// timeout: 5000, // 超过timeout则调⽤失败的回调函数// maximumAge: 1000 // 获取到的地理信息的有效期,超过有效期则重新获取⼀次位置信息// });2.腾讯地图获取当前地理位置信息//填⼊⾃⼰在腾讯地图开放平台申请的KEYvar geolocation = new qq.maps.Geolocation(" JU6BZ-AY2R5-JF5IN-QJAVP-CSM6H-AKFNP", "MyMap");var options = { timeout: 8000 };geolocation.getLocation(sucCallback, errCallback, options);//成功的回调返回的是⽕星坐标function sucCallback(position) {var mapInfo = JSON.stringify(position, null, 4);var jsonMapInfo = eval('(' + mapInfo + ')');success(jsonMapInfo.lng, t);}//失败的回调function errCallback() {geolocation.getLocation(sucCallback, errCallback, options);}//业务逻辑function success(la, lg) {//拿到经纬度的业务逻辑...}3.⽕星坐标转百度坐标需引⽤百度地图js//jsonMapInfo 为要转换的点var gpsPoint = new BMap.Point(jsonMapInfo.lng, t);console.log("转换之前的点" + t +","+gpsPoint.lng);BMap.Convertor.translate(gpsPoint, 2, function (point) {console.log("转换之后的点" + t + "," + point.lng);})4.百度地图获取当前位置信息并导航到⽬标点var geolocation = new BMap.Geolocation();//获取当前位置信息geolocation.getCurrentPosition(function (r) {if (this.getStatus() == BMAP_STATUS_SUCCESS) {console.log('您的位置:' + r.point.lng + ',' + t);var map = new BMap.Map("l-map"); // 创建Map实例map.centerAndZoom(new BMap.Point(r.point.lng, t), 13); // 初始化地图,设置中⼼点坐标和地图级别map.setCurrentCity("深圳"); // 设置地图显⽰的城市此项是必须设置的map.enableScrollWheelZoom(true); //开启⿏标滚轮缩放//var driving = new BMap.DrivingRoute(map, { renderOptions: { map: map, panel: "r-result", autoViewport: true } });//driving.search("中关村⼀街", "魏公村");var transit = new BMap.TransitRoute(map, {onResultsHtmlSet: function () { $("#r-result").show() },policy: 0,renderOptions: { map: map, panel: "r-result" }});//起点位置var start = new BMap.Point(r.point.lng, t);//需要导航的地址var end = new BMap.Point(GetRequest().la, GetRequest().lg);console.log(start);console.log(end);transit.search(start, end, BMAP_TRANSIT_POLICY_LEAST_TIME);//最少时间//var routePolicy = [BMAP_TRANSIT_POLICY_LEAST_TIME, BMAP_TRANSIT_POLICY_LEAST_TRANSFER, BMAP_TRANSIT_POLICY_LEAST_WALKING, BMAP_TRANSIT_POLICY_AVOID_SUBWAYS]; //0最少时间 1 最少换乘 }else {alert('failed' + this.getStatus());}}, { enableHighAccuracy: true })。
kuka获取当前位置函数
kuka获取当前位置函数获取当前位置是机器人控制中的一个重要功能。
通过获取当前位置,机器人可以知道自己在何处,从而能够做出相应的动作或决策。
对于KUKA机器人而言,获取当前位置的函数是非常简单的。
KUKA 机器人的控制系统提供了一个名为"GetCurrentPosition"的函数,通过调用这个函数,机器人可以获取到自己当前的位置信息。
具体来说,"GetCurrentPosition"函数可以返回一个包含机器人当前位置信息的变量。
这个变量通常包括机器人在三维坐标系中的位置和姿态信息,如坐标(x, y, z)和欧拉角(α, β, γ)等。
通过读取这些信息,机器人可以确定自己的位置和朝向,从而进行下一步的动作。
例如,当机器人需要将一个物体从A点移动到B点时,首先需要获取机器人当前的位置信息,然后计算出从A点到B点的路径,并将机器人移动到目标位置。
获取当前位置的函数可以帮助机器人准确地获取自己在空间中的位置,从而保证移动的准确性和稳定性。
除了获取当前位置的函数外,KUKA机器人还提供了其他一些相关的函数,如"GetOrientation"函数用于获取机器人当前的姿态信息,"GetJointAngles"函数用于获取机器人当前的关节角度等。
这些函数的使用可以帮助机器人实现更加复杂的控制和操作。
获取当前位置是机器人控制中的一个重要功能,KUKA机器人通过提供相应的函数来实现这一功能。
这些函数可以帮助机器人准确地获取自己在空间中的位置信息,从而实现精确的控制和操作。
通过合理地使用这些函数,可以使机器人实现更加复杂和多样化的任务,为人类生活和生产带来更多的便利和效益。
kuka获取当前位置函数

kuka获取当前位置函数获取当前位置是机器人控制与导航领域中的一个重要任务。
KUKA机器人是一种常用的工业机器人,具有强大的定位与导航功能。
下面将从人类的视角出发,描述KUKA机器人获取当前位置的过程。
我们需要明确KUKA机器人的当前位置是指机器人在空间中的坐标位置。
为了获取当前位置,KUKA机器人通常会使用激光测距仪、摄像头或其他传感器来感知周围环境。
这些传感器可以帮助机器人获取与周围物体的距离、形状等信息。
在获取传感器数据后,KUKA机器人会通过算法对这些数据进行处理和分析。
通过对传感器数据的处理,机器人可以确定自己相对于周围物体的位置和姿态。
这个过程类似于人类在感知周围环境时,通过眼睛、耳朵等感官器官获取信息,然后大脑对这些信息进行处理和分析,最终形成对周围环境的认知和理解。
具体来说,KUKA机器人可以使用SLAM算法(同时定位与地图构建)来获取当前位置。
SLAM算法是一种同时实现机器人定位和地图构建的算法。
通过SLAM算法,机器人可以通过感知周围环境的传感器数据,实时地估计自己的位置和姿态,并构建出周围环境的地图。
在SLAM算法中,机器人首先会根据传感器数据估计自己的初始位置。
然后,机器人会根据传感器数据和之前估计的位置,通过滤波算法(例如扩展卡尔曼滤波器)来对机器人的位置进行更新和校正。
同时,机器人还会根据传感器数据构建地图,以便在后续的导航过程中使用。
通过SLAM算法,KUKA机器人可以实时地获取自己的当前位置。
这种获取当前位置的方式类似于人类在陌生环境中通过感知和认知来确定自己的位置。
KUKA机器人通过感知周围环境的传感器数据,并通过算法对这些数据进行处理和分析,最终能够准确地获取自己的当前位置。
KUKA机器人获取当前位置的过程类似于人类通过感知和认知来确定自己的位置。
通过感知周围环境的传感器数据,并通过算法对这些数据进行处理和分析,KUKA机器人能够准确地获取自己的当前位置。
这种获取当前位置的方式使得KUKA机器人能够在工业生产中实现精确的定位和导航,提高生产效率和质量。
高德地图定位,获取当前位置坐标
⾼德地图定位,获取当前位置坐标<!doctype html><html><head><meta charset="utf-8"><meta http-equiv="X-UA-Compatible" content="IE=edge"><meta name="viewport" content="initial-scale=1.0, user-scalable=no, width=device-width"><title>浏览器定位</title><link rel="stylesheet" href="https:///lbs/static/main1119.css" /><script type="text/javascript" src="https:///maps?v=1.4.4&key=ad26780bfaabf0ca27ae6078e2e81682"></script> <script type="text/javascript" src="https:///lbs/static/addToolbar.js"></script><body><div id='container' style=''></div><div id="tip"></div><script type="text/javascript">/***************************************由于Chrome、IOS10等已不再⽀持⾮安全域的浏览器定位请求,为保证定位成功率和精度,请尽快升级您的站点到HTTPS。
如何查看手机当前位置的经纬度

生活中的常识,希望对您有帮助!
如何查看手机当前位置的经纬度
导读:本文是关于生活中常识的,仅供参考,如果觉得很不错,欢迎点评和分享。
在这里介绍查看手机当前地的经纬度的方法,希望本指南能帮到大家。
操作方法在手机桌面上,点开系统工具,在里面就会看到有“指南针”的按钮。
手指轻点一下“指南针”按钮;进入到指南针的界面。
我们看手机屏幕底部这里,在这里,我们看到有北纬度数与东经度数。
这就是手机当前位置的经纬度。
感谢阅读,希望能帮助您!
生活经验知识分享。
win7系统怎么修改当前所在位置
win7系统怎么修改当前所在位置
很多时候,我们出差或者到了外地之后,电脑的位置都会发生变化,这个时候,一些软件为我们提供的信息也会相应的改变,那么你知道win7系统怎么修改当前所在位置吗?下面是店铺整理的一些关于win7系统修改当前所在位置的相关资料,供你参考。
win7系统修改当前所在位置的方法:
1.首先,我们单击开始菜单,然后在菜单中点击进入到控制面板的界面中,在控制面板中,我们单击其中的“时钟、语言和区域”选项。
2.在接下来弹出的界面中,我们就可以看到如下图中所示的界面了,我们直接在区域和语言下方单击进入到更改位置。
3.之后弹出区域和语言的设置窗口,我们将界面切换到位置这一栏,然后下面的当前位置就可以供我们操作更改了,大家想设置到哪个位置就直接在这里选择就是了。
设置好之后记得点击下方的确定按钮保存哦。
win7系统修改当前所在位置的。
前端获取当前位置的方法

前端获取当前位置的方法
前端获取当前位置的方法可以使用WebAPI提供的GeolocationAPI。
通过该API,可以获得用户设备的地理位置信息,包括经度、纬度、海拔等。
使用Geolocation API需要先判断浏览器是否支持该功能,可以使用以下代码进行判断:
if (navigator.geolocation) {
// 支持Geolocation API
} else {
// 不支持Geolocation API
}
如果浏览器支持Geolocation API,则可以使用以下代码获取当前位置信息:
navigator.geolocation.getCurrentPosition(function(position) {
// 成功获取地理位置信息
console.log(titude); // 纬度
console.log(position.coords.longitude); // 经度
}, function(error) {
// 获取地理位置信息失败
console.log(error.code);
console.log(error.message);
});
其中,getCurrentPosition()方法接受两个参数,第一个参数为成功回调函数,第二个参数为失败回调函数。
在成功回调函数中,可以获取到一个包含地理位置信息的Position对象,从中可以获取到经纬度等信息。
在失败回调函数中,可以获取到错误码和错误信息,从而进行错误处理。
位置(一) 我当前的位置

位置(一)我当前的位置课时教案课题:第二单元:位置(用数对确定物体的位置)第课时总序第个教案课型:新授编写时间:年月日执行时间:年月日教学内容:教材第19页例1及教材第21页练习五第1、2题。
教学目标:知识与技能:使学生在具体的情境中认识“列”与“行”的含义,知道确定第几行、第几列的规则,初步理解数对的含义,会用数对表示具体情境中的位置。
过程与方法:使学生体验数学与生活的密切联系,进一步提高用数学的眼光观察生活的意识。
情感、态度与价值观:培养学生的空间意识和能力,进一步培养数感。
教学重点:会用数对确定物体的位置。
教学难点:正确区分“列”和“行”的顺序。
教学方法:自主探索,合作交流。
教学准备:多媒体。
教学过程一、情境引入1.导入:同学们,你们想不想知道其他班级上课的情境是什么样的呢?今天咱们就去五年级某班看一看。
看,这是张亮班级里的学生,多整齐!你能告诉老师张亮的位置吗?(出示教材第19页情境图中张亮那一列同学的座位)学生可能说:第3个、从前面数第3个、从后面数第3个等。
教师引导学生分析,要在一列座位中确定一个人的位置只要说清数的方向和第几个就行了。
2.揭题:今天我们就来学习如何用数对来表示物体的位置。
(板书课题:用数对确定物体的位置)二、互动新授(一)明确行、列的意义批注1.师引导:这么多表示方法有些乱,同学们所说的“排”,在数学上竖排叫“列”,横排叫“行”。
(板书:列行)并明确:数“列”的时候习惯上从左往右数,依次为第1列、第2列……数“行”的时候习惯上从前往后数,依次为第1行、第2行……把教材第19页情境图上的每一列和每一行按顺序写上,同桌互相指一指。
说明:通常情况下,描述物体位置时先说列,再说行。
让学生用正确的方法描述张亮的位置。
(第2列、第3行)2.引导:你能用刚学习的知识描述一下其他同学的位置吗?(举例王艳、赵雪,周明的位置等)让学生随便指图上一人,同桌互相说一说他的位置。
(学生练习)(二)认识数对1.引导:表示位置我们还可以用“数对”来表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当前位置:人教网2010>>初中生物>>教师中心>>同步教学资源>>教学设计>>八年级上册>>第二章动物的运动和行为
鸟适于空中飞行的特点
湖南省湘西州古丈县古阳中学吴清春
教学目标
知识目标:
1、阐明鸟适于空中飞行的形态结构特点;
2、概述鸟类的主要特征;
3、尝试独立完成“鸟适于飞行特点”的探究活动。
能力目标:
分析能力、逻辑思维能力和表达交流能力的培养
情感目标:
增强热爱生命,保护动物及其生存环境的意识
教学重点和难点
重点:
1、动物对环境的适应;
2、鸟类适于飞行的特点。
难点:
资料的收集和分析及逻辑推理
课前准备
1、教师:收集资料,制作CAI课件,实验材料(准备家鸽骨骼标本,活体家鸡和肉鸡及新鲜鸡大腿骨,制作纸飞机的纸),组织学生收集和整理资料(布置学生课前观察当地常见鸟类并作记录)。
2、学生:搜集鸟类知识,观察、调查本地常见鸟类并记录。
教学方法:
1、多媒体和实物展示相结合:利用课件增大课堂的容量,利用实物给学生以直观;
2、资料分析法:通过学生对资料的分析和讨论,激发学生的学习兴趣,活跃课堂气氛。
加强重点和突破难点的方法:
实物与幻灯片相结合引导学生分析、讨论,加强学生逻辑推理能力的培养。
课型:新授课、探究式学习
课时分配:1课时
板书设计
鸟适于空中飞行的特点:
1、外部形态:身体呈流线型;前肢变成翼;被覆羽毛。
2、内部结构:胸肌发达;骨薄而轻,长骨中空,内充满空气;直肠短,没有膀胱。
3、能量来源:食量大,消化能力强;有气囊,辅助呼吸。
教学设计方案:
教学实施过程:
授课时间:2007年9月10日
授课班级:湖南省古丈县古阳中学初二139
主讲教师:吴清春
课堂实录:
导入新课:
幻灯展示各种鸟类在空中飞行的视频,并配以优美的鸟鸣声。
师:同学们,在自然界中鸟类约有9000多种,除少数鸟不能飞行之外,绝大多数鸟都善于飞行,鸟能飞,就必定有与其飞行生活相适应的特点。
正与我们前面所学习的鱼一样,它生活在水中,就有与水中生活相适应的特点,大家还记得有那些特点吗?
生:身体呈梭形,用鳃呼吸,用鳍游泳。
师:鱼儿有这些特点,鸟儿怎样呢?现在我们来学习鸟适于飞行的特点。
屏幕滚出课题“鸟适于飞行的特点”
师:鸟适于空中飞行的特点较多,我们这节课将通过观察、分析、讨论来探究学习,下面我们先观察鸟的外形有什么特点与飞行有关。
幻灯展示:鸢、天鹅、蜂鸟、雁、燕、信天翁图片
师:鸟的前肢与人的手一样吗?变成什么了?
生:不一样,鸟的前肢变成了翅膀。
师:鸟的前肢变成翼,有利于飞行,但是否有翅膀就可以飞行了?你们说“拔毛的鸡”还能飞吗?
生:不能。
(生笑答)
师:那鸟的体表有什么?
生:羽毛。
师:鸟的羽毛都一样吗?下面我们来一起观察一下鸡的羽毛,看有几种。
教师抱鸡在数字展台上展示鸡的羽毛,将鸡翅膀上的羽毛与腹部羽毛进行对比,引导学生分析。
师:鸟有几种羽毛?
生:两种。
师:它们各有什么作用?
生:正羽用于飞行。
生:绒羽有保温作用。
师:通过观察鸟的图片,从中我们可以看出鸟的身体呈什么形状?
生:鸟的头小,身躯大,尾小,呈梭形。
师:鸟身体呈梭形,为与鱼体形相区别,我们称为流线型。
教师在黑板上用线条流畅的画出鸟的简笔画。
边画边讲解线条的流畅。
师:身体呈流线型有什么作用?
生:可以减少飞行时空气的阻力。
师:是这样吗?人们一起来探究一下。
教师引导学生取两张一样的纸,用其中一张纸叠成一个纸飞机,另一张不处理。
然后找两位学生:一人向前扔纸,另一位同学向前扔纸飞机。
引导学生观察、分析。
师:什么扔的远?
生:纸飞机。
师:为什么同样的纸,改变形状后就扔得远了呢?
生:形状改变后,可减少空气的阻力。
师:鸟的身体呈流线型,有翅膀,就可以飞,我们人类也象鸟一样也装上一对大翅膀能飞起来吗?
视频展示人装上翅膀后的飞行状况,用丰富生动的语言描述场景,结合教师形象生动的肢体语言展示手上装上大翅膀后吃力扇动时的情景。
(学生大笑)
师:人为什么有了翅膀还不能飞?
生:肌肉不够发达。
师:这说明鸟的肌肉怎样?
生:鸟有发达的肌肉。
师:对,鸟的胸肌十分发达,这样才能产生足够的动力。
那么,是否胸肌发达就可以飞了呢?下面我们仔细观察肉鸡与家鸡胸部的肌肉情况。
教师向学生展示肉鸡,引导学生比较肉鸡与家鸡胸部肌肉的情况。
师:肉鸡与家鸡相比,谁的胸部肌肉发达?
生:肉鸡。
师:那为什么家鸡可以飞,而肉鸡不能飞呢?
生:肉鸡太重了。
师:肉鸡要飞,就必须减轻体重,鸟也一样。
下面我们来观察鸟有那些结构可以减轻体重。
课件展示:鸟骨骼特点;
向学生展示家鸽骨骼标本;
用刀切开新鲜鸡大腿骨,让学生观察。
师:大家发现鸟的骨骼有什么特点?
生:胸下有一块骨特别宽大。
生:鸟的骨头都很薄。
生:大腿骨中间是空的,没有什么骨髓。
师:对,鸟的骨薄而轻,长骨中空,有利于减轻体重。
课件展示:鸟的消化系统图,突出直肠的短。
鸟的泌尿系统图,突出没有膀胱。
生:鸟的直肠很短。
生:鸟没有膀胱。
师:直肠短,随时排便,没有膀胱,产生的尿液,随粪便一起排出,这样可以达到减轻体重的目的。
师:飞机飞行时要什么?
生:油。
师:鸟的飞行要什么?
生:食物。
师:鸟的食量怎样?请同学们阅读教材上的资料来作答。
资料展示:
1、有关鸟消化特点的资料
雀形类的鸟所吃的谷物、果实或昆虫,经消化吸收后形成残渣,1.5小时后就随粪便排出。
绿头鸭吃进的食物,经消化吸收后形成残渣,0.5小时后就随粪便排出。
雀形类的鸟一天所吃的食物,相当于自身体重的10%~30%。
蜂鸟一天所吃的蜜浆,约等于它体重的2倍。
体重为1500克的雀鹰,能在一昼夜吃掉800~1000克肉。
2、鸟的身体里有发达的气囊。
这些气囊一端与肺相通,分布在内脏器官之间,有的还突入到骨的空腔里。
生:鸟吃的东西多。
生:食量大,消化快。
生:呼吸系统中有气囊。
师:鸟的食量大,消化能力强,为鸟的飞行提供了足够的能源;有气囊,可以辅助呼吸,鸟每呼吸一次,气体两次经过肺,在肺内进行两次气体交换,我们称之为双重呼吸,为鸟类飞行提供足够的氧气。
师:我们学习了这么多鸟适于飞行的特点,大家一起来回顾一下吧。
屏幕展示板书:
鸟适于空中飞行的特点
1、外部形态:身体呈流线型;前肢变成翼;被覆羽毛。
2、内部结构:胸肌发达;骨薄而轻,长骨中空,内充满空气;直肠短,没有膀胱。
3、能量来源:食量大,消化能力强;有气囊,辅助呼吸。
师:雀形类鸟一天所吃的食物,相当于自身体重的10%~30%,雀形类鸟主要吃的是农业害中,它与我们人类有怎样的关系?我们应该怎么做?
生:我们应该爱护鸟类,保护它们的生存环境。
教学后记:
生物对环境的适应是自然界中的一种普遍现象。
鸟适于空中飞行的特点是本章的重点也是一个难点,在以往的教学中,学生对鸟类的很多特点难理解掌握。
本人以往的教学以经验,在本节的教学中,尝试利用多媒体课件与实物、标本相结合,采用循序渐进、逻辑推理的方法,引导学生探究式学习,探讨鸟类适于空中飞行的特点。
通过探究应使学生明确,动物对环境的适应,除了有外部形态、内部结构的适应外,还有生理方面和行为方面的适应,同时概括鸟类的主要特征。
在本节教学过程中,引导学生逻辑推理不够严谨。