XIA-MI1000编程手册
AB_MicroLogix1000可编程控制器概要

VAC O/1 VDC
012345
85-264 VAC L1 L2/N VAC O/0 VDC
DC INPUTS
RELAY OUTPUTS
AC POWER
VAC O/2 VDC
VAC O/3 VDC
VAC O/4 O/A
型号说明
MicroLogix 1000按其是否带有模拟量输出可分为两种款型,共14种型号, 下面介绍型号标识的具体含义:
电源
输 入 信 号
输 入 单 元
中央处理单元 (CPU)
输 出 单 元
输 出 信 号
PC
编程设备
外 设 接 口
存储器 EPROM (系统程序) RAM (用户程序)
I/O 扩 展 口
I/O 扩 展 单 元
整体式PLC组成示意图
各部分的功能简介
CPU:是PLC的运算控制中心,用扫描的方式接受输入信号,送入寄存器保存,当 PLC进入运行状态后,按顺序逐条读取用户程序,进行解释和执行并将执行结果 送到输出端 存储器:系统程序存储器采用ROM,用于存放PLC的操作系统程序,用户指令 解释程序,系统诊断程序和通讯管理程序,出厂时根据不同的PLC编写并已经固 化,用户不能访问和修改;用户程序存储器采用EPROM,用于存储用户程序, 可擦除重新编程,其容量就代表PLC的容量;工作数据存储器采用RAM,用于 存储PLC运行中经常变化,需要随机存取的一些数据 I/O单元:是PLC与现场设备连接的接口,分为开关量I/O单元和特殊功能I/O单元 两种 编程设备:用于输入,检查,修改,调试和监控用户程序,一般使用PC完成
罗克韦尔软件产品介绍
控制器编程软件 RSLogix500:支持Allen-Bradley SLC500系列和MicroLogix系列可编程控 制器的编程 RSLogix5000:支持Logix5000系列可编程控制器的编程 通讯软件: RSLinx:为现场设备连接众多的罗克韦尔软件提供全套的通讯服务 人机界面编程软件: PanelBuilder32:用于A-B人机界面产品PanelView系列的开发编程 RSView Studio:用于A-B人机界面产品PanelView plus系列的开发编程
MIX-1000资料3

MIX-1000系统概述MAX-1000闭路电视管理系统单机系统最小配置是32路视频输入/1路视频输出,最大配置是1024路视频输入/256路视频输出,更大的系统配置可通过单机矩阵和联网技术实现;视频输出具有文字叠加功能,叠加的文字包括摄像机信息,通道标号,当前的时间/日期以及其他的系统和操作员信息;可提供64个独立的键盘控制,更多的系统键盘配置可通过联网技术实现;可提供99个独立的操作员访问系统,每个操作员可定义不同的操作级别和访问权限;系统操作键盘可完成全功的摄像机控制(P/T/Z-承载摄像机的云台上下/左右动作,摄像机镜头的焦点/焦距/光圈控制);系统操作键盘可完成录像机的所有动作,例如停止/启动/录制/快进/快退/暂停/慢动作等等;系统操作键盘可完成对其他视频设备的控制,例如视频移动检测器,画面分割器等等;可配置各种外部报警输入;可配置各种辅助输出控制,可控制各种外部设备,例如门,灯等等,而且控制外部设备的方式有3种,由外部报警输入触发,由键盘手动调用,由系统任何实际存在的事件调用;不仅有通常的报警联系表,而且当有报警时可调用系统的宏或用户自己定义的宏,甚至当报警解除时也可调用系统的宏或用户自己定义的宏.一.MAX-1000闭路电视管理系统的宏宏的定义:宏是一系列控制键盘按键顺序的组合,类似计算机中的批处理文件.当系统调用它时,它将按照预先编程按键顺序,自动执行键盘的一系列操作和控制,系统按照预先编程的顺序一步一步完成控制功能.它提供了控制功能的强大组合,彻底解决了操作的烦琐,避免了操作的失误.控制键盘的任何按键动作或任何一系列的按键动作都可以作为宏.宏可由外部报警自动调用,可由系统报警自动调用,可由操作员手动调用.系统的宏库是一个全面的宏,支持9999宏顺序,每个宏顺序包含50个键盘的按键控制命令.冷启动的宏:当系统上电时,系统自动执行的宏,它可完成系统的专用设置和其他缺省的设置.(类似于计算机上电后的自检)热启动的宏:当系统的子机箱重新复位时,系统在完成系统运行和初始化,然后自动执行的宏.(不执行冷启动的宏)MAX-1000闭路电视管理系统的宏由SETMAX系统配置编辑器进行设置.二.MAX-1000闭路电视管理系统的控制:在MAX-1000系统中,大部分视频输入设备都可以用控制键盘操作和控制,它包括摄像机PTZ的控制,VCR的控制等.摄像机PTZ控制摄像机PTZ的控制接口有四种方式,分别是用输入/输出机箱的输出模块直接输出继电器控制,两线数据的通讯到变速的解码器,高速云台和MAXPRO的球型摄像机,第3方的云台和球型摄像机的RS-485通讯方式.VCR控制MAX-1000闭路电视管理系统VCR与系统视频切换机箱的关系有固定式,动态式,确定式.1)固定式:在视频切换机箱的视频输出(文字叠加模块)和监视器之间连接录像机.录像机将录制监视器上的任何图像,而且只能将图像回放到录制监视器上进行显示.2)动态式:将视频切换机箱的视频输出和录像机的视频输入相连,录像机的视频输出连至视频切换机箱的视频输入.录像机可录制系统任何一台摄像机图像,图像可回放到系统中任何一台监视器上显示.3)确定式:一台摄像机先经过一个预置文字叠加模块,然后与录像机相连,录像机的视频输出连至视频切换机箱”VCR回放”视频输入.MAX-1000闭路电视管理系统控制录像机有下列4种方式:1)直接控制:使用标准的继电器输出模块直接控制录像机.可提供8个录像机的操作功能.例如:停止/开始/快进/快退/暂停/慢动作/录制等.2)RS-232控制: 使用周边设备控制模块通过RS-232数据控制录像机.可最多提供32个录像机操作和控制功能.例如:停止/慢动作/录制/回零/电源等等.3)红外控制:使用周边设备控制模块通过红外遥控录像机.可最多控制8台录像机;可最多提供16个录像机操作和控制功能;为每个录像机提供一个报警点输入,报警点用于检测录像机状态,例如不在录制状态或录像带使用完. 可在国内大部分带宽下使用.4)电阻阵列控制: 使用周边设备控制模块通过两线制的电阻阵列遥控录像机.可最多控制8台录像机;可最多提供16个录像机操作和控制功能,为每个录像机提供一个报警点输入,报警点用于检测录像机的状态.三.MAX-1000闭路电视管理系统的安全和访问MAX-1000闭路电视管理系统可有64个控制键盘,每个控制键盘可以有几个操作员,系统可为每个操作员分配不同的操作权限,防止无授权操作员访问系统高级权限的操作和控制.每个访问系统的操作员必须输入4位个人识别码(PIN-Personal Identification Number).系统拥有100个操作级别,级别代码0是专用的操作级别,具有排斥其他任何操作级别的特点,而级别代码1是最低的操作级别,级别代码99是最高的操作级别.系统由于允许64个控制键盘同时操作,所以会出现操作和控制各种保安资源冲突的情况,下表说明当出现冲突时,系统解决的办法:保安资源指监视器,摄像机的云台和镜头,录像机以及其他的设备.MAX-1000闭路电视管理系统的操作级别设置由SETMAX系统配置编辑器进行设置. 四.视频丢失检测:MAX-1000闭路电视管理系统可为每个视频输入提供视频丢失检测功能,可检测3种形式的视频丢失检测,而且视频丢失检测与视频图像是否在监视器上显示该图像无关.1)视频丢失:如果一个摄像机损坏或视频电缆被剪断,则在显示该摄像机画面的监视器上将出现”LOST VIDOE(视频信号丢失)”报警信息.2)视频信号低:如果一个摄像机的图像没有丢失,而是黑屏几秒钟,则在显示该摄像机画面的监视器上将出现”LOW LEVEL VIDEO(视频信号低)”报警信息.3)视频信号高:如果一个摄像机的图像没有丢失,而是白屏几秒钟,则在显示该摄像机画面的监视器上将出现”HIGH LEVEL VIDEO(视频信号高)”报警信息.五.文字叠加:MAX-1000闭路电视管理系统的文字叠加包括监视器文字叠加和录像机文字叠加.文字叠加内容有当前时间/日期,操作员系统信息,而且文字叠加内容由系统控制器不断刷新;文字叠加显示模式多种多样,通常是黑底白字;文字叠加显示位置可以是上,下,左,右,或任何位置,防止视频图像受到文字叠加影响.监视器文字叠加内容包括当前摄像机,当前时间/日期,当前操作员的名字和其他系统信息.录像机文字叠加内容包括当前摄像机,当前时间/日期和其他系统信息.它用在将一个摄像机的图像录制在录像机上的应用场合.六.报警MAX-1000闭路电视管理系统报警源可以是外部报警,摄像机信号丢失检测,摄像机PTZ 解码器故障检测等.用户可以任意设防和撤防外部报警;如果摄像机故障,或视频传输线被剪断,将产生视频信号丢失报警;如果摄像机PTZ解码器故障,或PTZ解码器信号传输线被剪断,将产生PTZ解码器故障报警.所有的报警都可调用用户预先编程的宏,自动完成系统一系列功能执行.七.自动切换:MAX-1000闭路电视管理系统最多有999个自动切换,每个自动切换最多有99个切换项.可在几个监视器上同时运行同一个自动切换.警戒切换:指自动切换的每个切换项只执行一次,当切换到最后一个切换项时,监视器将保持最后一个切换画面,而不返回到第一个切换画面继续执行切换.八.报警显示组:每个报警对应一个报警显示组.报警显示组范围0到99.任何一个报警显示组都可对应报警监视器.如果一个报警显示组对应几个监视器,当有报警时,几个监视器将同时显示报警摄像机画面.九.报警的排序:报警的排序指在同一时间产生多个报警时,系统将按照报警产生的顺序把报警画面排序,按照预定的时间周期自动切换画面,并完成每个报警调用宏的执行.报警排序最大99.如果系统报警排序超过99,在监视器上将出现”报警排序溢出”报警信息,而以后产生的报警将不会响应,所以操作员必须手动清除一些报警,为以后产生的报警腾出空间.十.隐藏监视器文字隐藏监视器文字指从监视器上完全清除文字显示.操作员可用键盘手动清除,系统也可自动清除.选择别的摄像机或选择别的监视器将中断隐藏监视器文字.十一.监视器黑屏监视器黑屏指将非报警的摄像机画面从报警监视器上清除,报警监视器保持黑屏状态,当有报警时,报警摄像机画面立即显示到报警监视器上,监视器由黑屏状态立即转变为报警摄像机画面.采用监视器的黑屏将操作员的监视.监视器黑屏功能将在SETMAX系统配置编辑中设置.十二.动态文字动态文字指可将文字信息放在监视器画面的任何位置.可为每个摄像机采用动态文字,它将保护监视器画面的重要信息.采用X坐标和Y坐标确定它显示的位置.动态文字功能将在SETMAX系统配置编辑中设置.十三.视频切换的黑暂停当由一个摄像机画面切换到另一个摄像机画面时,由于摄像机的不同步,监视器需要时间进行同步,所以监视器将产生画面滚动.为解决以上问题,MAX-1000闭路电视管理系统在进行同步时,监视器将保持短暂的黑屏,以屏蔽画面滚动.采用视频切换的黑暂停技术将提高监视器的使用寿命,保护操作员的眼睛.十四.CCTV键盘超时当两个不同权限的控制键盘控制同一个监控设备,高权限的控制键盘将得到控制权,如果高权限控制键盘的操作员离开,忘记停止对监控设备的控制,则低权限控制键盘将无法得到控制权.为解决以上问题,MAX-1000闭路电视管理系统为每个操作键盘提供1个超时时间,在超时时间内无操作控制,该操作键盘自动放弃控制权.超时时间范围1到255秒.十五.自动锁住如果高权限的操作员忘记锁住键盘控制,在某个时间后系统将自动锁住键盘,以防止无授权的非法操作.自动锁住时间范围1到99分.十六.实时时钟MAX-1000闭路电视管理系统时钟是真正的实时时钟,采用计算机时钟技术.断电后,仍然同步保持系统实时.实时时钟的格式:DD/MMM/YY hh:mm.sec(日/月/年时:分.秒).系统可采用系统实时时钟定时启动宏执行.十七.机箱的扩充:MAX-1000闭路电视管理系统1个机箱可提供128路视频输入和32路视频输出,当系统配置超过128路视频输入或32路视频输出时,MAX-1000闭路电视管理系统采用机箱的星形联接,并连联接和既有星形联接又有并连联接的混联进行视频输入和视频输出的扩展,典型的可以扩展至512路视频输入和64路视频输出.1.当系统超过128路视频输入或32路视频输出时,采用机箱的星形联接进行视频输入的扩展.星形联接:将机箱1到4的32路视频输出做为机箱5的视频输入,机箱5的32路视频输出做为系统的视频输出.(见下图)采用机箱星形联接,可以组成256路视频输入和32路视频输出,384路视频输入和32路视频输出,512路视频输入和32路视频输出.2.当系统视频输出超过32路而视频输入是128路时,采用机箱的并连联接进行视频输入扩展.并连联接:在视频输入接至机箱1的同时,将视频输入环接到机箱2,做为机箱2的视频输入,而机箱3的32路视频输出是1到32号,机箱6的32路视频输出是33到64号,组成128路视频输入,64路视频输出.(见下图)采用机箱的星形联接,可以组成256路视频输入和32路视频输出,384路视频输入和32路视频输出,512路视频输入和32路视频输出.3.当系统的视频输出超过32路和视频输入超过128路时,采用机箱的混联进行视频输出和视频输入的扩展.混联:在视频输入接至机箱1,2,3,4的同时,将视频输入环接到机箱6,7,8,9做为机箱6,7,8,9的视频输入;将机箱1,2,3,4的32路视频输出做为机箱5的视频输入,机箱6,7,8,9的32路视频输出做为机箱10的视频输入,接监视器或其它设备.(见下图)采用机箱的混联,可以组成256×40,256×48,……512×64的视频输入和视频输出. 十八.MAX-1000闭路电视管理系统联网:MAX-1000闭路电视管理系统不仅可进行单系统监控,而且还是一个可联网监控系统. 以往监控系统联网往往只能形成简单的网,该网不能真正共享资源,不能形成多级网络,首先不能达到一台主机控制多台主机,其次在视频图像传输方面,只能采取视频环接分配的方式,网络中需共享多少路视频图像,就需要多少路传输线路,所以图像传输和共享成本非常巨大,而且不能进行双向视频传输.MAX-1000闭路电视管理系统联网是矩阵主机之间联网, 联网方式多种多样,可采用星形联网,形成一个中心监控而多个现场分控的联网;可采用“树状”联网,形成等级严格且设置灵活的网络;可采用“混联”联网,形成根据不同的操作权限拥有不同的网络级别的联网.任意形式的联网都不是一成不变的,可根据不同时间和空间的需要任意调整.通过联网,若干个单独MAX-1000系统可跨时间和空间共享资源,相互控制,传输信息.MAX-1000闭路电视管理系统中任何一个网络节点可完成控制,操作和访问网络中PTZ,录像机,灯,门等设备.例如甲网络节点的摄像机图像可由乙网络节点调用,并显示在乙网络节点的监视器上;丙网络节点的报警信息以广播式方式传输到丁网络节点,而丁网络系统也可控制该报警.用户只需完成两方面的工作,就可完成MAX-1000闭路电视管理系统的联网.一方面是控制信号的联网,另一方面是视频信号的传输. MAX-1000闭路电视管理系统联网的控制信号是标准双向通讯RS-232信号,视频信号的传输也是标准视频信号传输.用户将系统控制器之间的RS-232相互通讯;将视频切换机箱的视频输入和另一个的视频切换机箱的视频输出相连.例如,如果只允许甲网络节点调用乙网络节点的视频图像,则视频图像将单向传输,即由乙联网接点的视频切换机箱视频输出,输入到甲联网接点的视频切换机箱视频输入; 如果甲联网接点可调用乙联网接点的视频图像,乙联网接点也可调用甲联网接点的视频图像,则视频图像线路传输就是双向的,即由乙联网接点的视频切换机箱视频输出,输入到甲联网接点的视频矩阵机箱视频输入, 而且由甲联网接点的视频切换机箱视频输出,输入到乙联网接点的视频切换机箱视频输入.网络主节点1可调用网络子节点2的录像机设备,对录像机进行控制和操作,例如回放,录制. 摄像机故障报警,PTZ现场故障报警,VCR报警,时间/日期同步和系统复位等系统信息网络节点都可共享.网络主节点1和网络子节点2可调用网络子节点3的门设备,对开关门.使用插入输入/输出机箱的一个通用周边设备接口卡可以控制录像机,用户可选红外,电阻阵列,或RS-232通讯方式.标准设备的控制:MAX-1000系统使用继电器控制输出模块控制继电器的动作,进行对其它标准设备的控制可.网络冲突的管理:联网的MAX-1000闭路电视管理系统如果在同一时间,有若干个网络节点共享资源和控制设备,就会出现网络冲突的情况,MAX-1000系统采用下列3种方式解决网络冲突.1)高操作权限优先:拥有高操作权限的网络节点优先低操作权限的网络节点共享资源和控制设备,低操作权限的网络节点无法从高操作权限优先的网络节点手中夺得资源的共享和设备的控制.系统的缺省设置.2)报警优先:只有产生报警时,网络节点才能夺得另一个网络节点的资源共享和设备控制.3)禁止: 在任何情况下,网络节点之间无法共享资源和控制设备.十九.视频输入干扰消除从摄像机到监视器的视频信号传输是采用同轴电缆,它经常受到电源的工频干扰.工频干扰可造成监视器上视频图像扭曲、滚动,或产生上下移动白条.经验证明,如果长距离传输视频信号的同轴电缆和电源之间的距离相距很近,那么由于电磁感应,将会在同轴电缆内部导体和外部导体或屏蔽线之间产生一个电压;如果一个建筑物有两个处于不同地点的接地点,则在这两个接地点之间会产生几伏的电压,例如在大部分安装中会出现摄像机有一个接地点,而视频切换矩阵有另一个接地点,结果电源的电流通过同轴电缆外部导体或屏蔽线流向大地,将在视频信号上产生一个电压.MAX-1000闭路电视管理系统的设计可以减少或消除由接地环流和电磁感应引起的干扰,将接入视频切换矩阵的视频同轴电缆直接接地去除,并且在输入缓冲区使用不同的视频增益放大,系统减少到直流还原和限位电路的点跳跃,由此除去了剩余的干扰.预防:浮动视频输入的应用将排除接地板的使用.如果用户使用MAX-1000的先进功能,则为必需摄像机视频到视频切换器起隔离作用的接地板.可以最大消除6V点到点的干扰.二十.MGP—MAX的图形平台MGP是一个配置控制面板环境.它可以调协系统所需的控制功能显示给操作人,诸如监视器的选择,扫描,通常在最复杂的CCTV系统和网络中,最复杂和自动的功能将从控制面板中指定的任务执行.在MGP的主窗口的上部MGP不仅仅是显示状态和信息.图形热点已可应用在MAP.它可设计为图的一部分区域或再现的图做为按钮或别的动作.用户使用PC机的鼠标指向并激活热点,则热点将指向真正地执行程序且送一个信息到MAX-1000的执行程序.可以任何简单的和复杂的方法响应,使用内部MGP控制图标,可自动使用内部的MGP,多个图标可定位给控制窗口的选择或不选择.用户的CCTV应用中,使用视频卡配合MGP的使用,可以完成或视频的打印或保存,以达到GUI控制平台的真正集成.二十一.MAX图形平台(MGP)为MAX-1000提供的图形用户界面.在出入控制,大厦管理和工业机器控制上大量地引入了计算机技术,而在CCTV领域计算机广泛地运用在和别的系统智能集成方面使用图形用户界面使操作者对系统的操作更加简单,快捷,集中.MAX的图形平台极大地,深入地增强和扩展了MAX-1000 CCTV的管理系统的功能,但它不是一个图形用户界面.MGP是用于建立用户应用的GUI的图形配置环境,以正确完成用户控制环境所需要的指定操作.它运行在WINDOWS 环境下,以便很好地与别的管理工具集成.当底层平面或全彩色照片的图标放入地图中,MGP将显示来自MAX-1000的状态信息,例如在指定的图形地图中,状态信息可以用颜色的改变,形状的改变和设计图形的改变,它可以和灯的开/关,门的开/关相对应.在简单和复杂的系统中,用多个地图来代表多个定位和位置.当系统的状态改变时将自动调用地图,或从菜单条(MENU BAR)手动选择地图,用快速拾取地图列表或从所有的地图选择对话框中选择地图名.MGP将立即用对话框提醒操作人状态已改变,自动选择相应的地图显示给操作二十二.第三方高级接口在MAX-1000配置编辑器里,所有控制功能和操作通过高级接口和现有的系统相连,使现有系统和MAX-1000闭路电视管理系统变得透明,用MAX-1000键盘可以完成已有系统中所有摄像机和监视器控制,而且还包括MAX-1000所特有控制功能.如用键盘对VCR和周边设备的控制.完成方法:MAX-1000闭路电视管理系统通过一个高级接口连接到现有矩阵主机键盘的接口上即可.而高级接口仿佛是一个协议转换器且输出现有系统标准键盘指令.所有报警输入必须连到MAX-1000输入/输出子机箱中.高级接口有两种使用方法:1.如果现有的摄像机只要求显示在现有的监视器上,不要求现有的摄像机在联网的系统监视器上显示,则只需用高级接口将现有的系统和视频管理系统相连.2.如果MAX-1000想将现有系统的视频选择到联网MAX-1000的系统监视器上,则将现有系统的视频输出连到视频管理系统的视频输入,MAX-1000将会按照最有效的中继和路由进行选择.多系统的联网在一个大区域内实行监控或在现有的几个矩阵系统基础上,MAX-1000系统可以进行统一而又各自相互独立控制的联网系统.矩阵系统通过网络联结在一起,联网的矩阵可以在现场的监视器选择和调用远程的任意摄像机的视频图像,控制远程摄像机的PTZ,控制远程的设备,例如录像机、移动探测器、视频打印机,电子门锁、灯光等等三级联网的闭路电视监控系统的说明:1.系统是三级联网,其中在整个系统中,一级主控系统的控制级别最高,二级主控系统的控制级别次之,三级主控系统的控制级别最低.2.每个主控系统各自都是相对独立的控制系统,可以对自身的监控设备进行完全控制,例如二级主控系统之一,她可以完成对(5)到(8)摄像机所有的控制功能和报警附属设备的控制等等.3.在整个系统中,一级、二级和三级主控系统的视频输入(例如摄像机)和视频输出(例如监视器)的编址是统一的,唯一的.例如摄像机的编码是从(1)到(20).4.各级主控系统之间的视频连接是由一个主控系统的视频输出连至另一个的主控系统的视频输入,视频连接是否双向,取决于整个系统中各级主控系统的关系.当M级主控系统和N 级主控系统之间只能是M级主控系统调用N级主控系统的视频图像,则M级和N级主控系统之间的视频连接是单向的,即N级主控系统的视频输出连至M级主控系统的视频输入;当M级主控系统和N级主控系统之间是可以相互调用对方的视频图像,则M级和N 级主控系统之间的视频连接是双向的,即N级主控系统的视频输出连至M级主控系统的视频输入;M级主控系统的视频输出连至N级主控系统的视频输入.5.各级主控系统之间的双向数据连接是指控制信号的连接,传送的数据是主机之间标准的RS-232信号.6.各级主控系统之间的视频连接和数据连接由于是标准的通讯信号和视频信号,所以可以使用各种远程传输信号的设备和介质,例如调制解调器和公用电话网,光端机和光纤网,发射接收设备和微波网.7.各级主控系统都可以有自己的图形工作界面即多媒体工作站,不但完成本系统的所有控制功能,而且界面友好,操作简单直观。
EdgeLogix -RPI-1000 用户手册说明书
———————————————————————————————————————————EdgeLogix-RPI-1000 User Manual V1.0 Industrial Edge controller for IIoTExplanation of symbols usedThe following symbols are used in these instructions:NOTENOTE indicates tips, recommendations and useful information on specific actionsand facts.NOTICENOTICE indicates a situation which may lead to property damage if not avoided.CAUTIONCAUTION indicates a dangerous situation of riskContents1.Introduction (1)1.1 Features (1)1.2 Interfaces summary (2)1.2.1 Front view (2)1.2.2 Top view (3)1.3 Product label (4)1.4 Block Diagram (5)2.Installation and Wiring (6)2.1 Mounting (6)2.2 Connectors and Interfaces (7)2.2.1 Power supply (7)2.2.2 Left connector (8)2.2.3 Connectors of Signal Board (10)2.2.4 HDMI (11)2.2.5 Ethernet (12)2.2.6 USB HOST (12)2.2.7 Console (USB TYPEC) (12)2.2.8 LED (13)2.2.9 SMA Connector (14)2.2.10 SIM card slot (14)2.2.11 LCD panel and keyboard (15)2.3 GPIO Multiplex (16)2.4 Mainboard (17)2.4.1 Mini PCIe (18)2.4.1.1 Mini-PCIe 1 (19)2.4.1.2 Mini-PCIe 2 (20)2.4.2 PCIe subsystem (21)2.4.3 LCD board (21)2.4.4 Signal board (21)3.Drivers and Programming (21)3.1 LED (21)3.2 Serial Port (RS232 and RS485) (21)3.3 Cellular over Mini-PCIe (22)3.4 WDT (24)3.4.1 Block Diagram of WDT (24)3.4.2 How it works (25)3.5 RTC (25)3.5.1 Wiring (25)3.5.2 How it works (25)3.6 LoraWAN over Mini-PCIe (26)3.7 Signal board (26)4.Software Basics (26)5.Applications (26)6.Electrical specifications (26)7.Mechanical (26)1.IntroductionEdgeLogix-RPI-1000, modular, open-architecture edge controllers manage complex interfaces across assets and devices or into the cloud directly, with legacy and next generation industry control system. EdgeLogix-RPI-1000 provides performance and scalability for a wide range of industrial applications, including motion control, networking, IO and IIoT in a compact model, as while as the advantages of traditional IEC-61131-3 programming with the flexibility of Linux.The EdgeLogix-RPI-1000 Series covers all the functions required of logic computing, including easy operation and compatibility with a variety of control and measurement applications. This flexible device for ultra-reliable measurement and control of industry users the customized logic and control needed to meet application requirements. Industry-leading configurability and programmability fulfill standard to complex requirements while secure, built-in flow measurement calculations make it easier than ever to prove compliance. In addition, cloud-enabled functionality for licensing simplifies day-to-day operations. Digitally transform your operation by streamlining complex processes with the agile, intuitive EdgeLogix. This new controller is also p art of Seeed Studio’s next-generation EdgeLogix Series measurement and control platform that offers a common set of configuration tools, to expedite setup and facilitate commonly performed tasks.1.1 Features•Rugged, reduced-maintenance hardware•High isolation, surge, and short circuit protection•Open architecture support custom programming•Ethernet, I/O ,4G/LTE, CANopen and Modbus bridging•Natively Supports Modbus & CANopen Protocols•Cloud Connectivity to IIoT Cloud Platforms•Display for commissioning and diagnostics•IEC 61131-3 compliant programs support (under developing).•Flexible of local BUS extension•Neural Processing Unit (NPU) enables Artificial Intelligence for automation•Wide power supply from 10.8 to 36V DCThese features make the EdgeLogix designed as a cost-effective controller that provides the functions required for a variety of field automation applications. The EdgeLogix monitors, measures, and controls equipment in a remote environment. It is ideal for applications requiring flow computation; Proportional, Integral, and Derivative (PID) control loops; logic sequencing control; and a gateway with flexible wireless and field sensors expansion.1.2 Interfaces summary1.2.1Front view1. 4.3-inch LCD panel2.X30, up connector of Signal Board3.X40, down connector of Signal Board4.X3, Ethernet port 35.X2, Ethernet port 26.X1, Ethernet port 17.Dual USB 2.0 port8.X10, Left connector, Multi-Func phoenix connector9.Key board10.3x dual color LED1.2.2Top view1.Antenna A42.Antenna A33.Antenna A24.Antenna A15.HDMI port to monitor6.LocalBUS port7.Main power supply8.Console of Type-C9.TF card slot10.SIM card slot1.3 Product label1.4 Block DiagramThe processing core of the EdgeLogix-RPI-1000 is a Raspberry CM4 board. A customized carrier board implements the specific features. Refer to next figure for the block diagram.2.Installation and Wiring2.1 MountingThe 35mm DIN-rail mount is the primary method, as while as the wall mount.• The entire power supply must be disconnected and electrostatic discharge must take place on the housing or ground connection before removing any covers or components from the device and installing or removing any accessories, hardware or cables.• Remove the power cable from the device.2.2 Connectors and Interfaces2.2.1Power supplyConnect the device to the voltage supply according to the following figure.1.24V, main power supply+2.GND, main power supply-3.EARTH, connect to earth2.2.2Left connectorLeft connector is a Multi-Func phoenix connector.NOTE 1:24awg to 16awg cable are suggested.NOTE 2:All RS485 signals are isolated with other signals. NOTE 3: All DO and DI signals are isolated.◆Characteristics of Isolated RS485 Interface⚫Can used as Modbus/RTU Master or Modbus/RTU Extension .⚫Supported Function Codes: #01, #02, #03, #04, #05, #06, #07, #0F, #10 .⚫Maximum 32 devices on bus (1 master and 31 extensions) .⚫Built-in asymmetrical protection against transient voltages resulting from electro-static discharge (ESD), electrical fast transients (EFT), and lighting.⚫Terminal resistor of 120 OHM has been installed default.◆Characteristics of RS232 Interface⚫The RS-232 serial interface communication standard has been in use for many⚫years. It is one of the most widely used connections for serial data transmitting⚫because it is simple and reliable.⚫The RS232 serial interface standard still retains its popularity and remains in widespread⚫use. It is still found on some computers and many interfaces, often being⚫used for applications ranging from data acquisition to supply a serial data communication⚫facility in general computing environments.⚫The interfaces intended to operate over distances of up to 15 meters.◆Characteristics of I/O Interface⚫DC voltage for input is 24V (+- 10%).⚫DC voltage for output should be under 60V, the current capacity is 500ma.⚫Channel 1 and channel 2 of input are isolated to each other.⚫Channel 1 and channel 2 of output are isolated to each other.2.2.3Connectors of Signal BoardThe signal board is fully isolated with main PCB board. It contains X30, X40 and X6 of connectors.X30 is used as DIO signals. The following figure shows details of wiring.X30 wiring◆Characteristics of DI and DO Interface⚫The power supply of DI should be 5-36V DC,24V default.⚫The power supply of DO should be 10.8-60V DC,24V default, and the current of each channel is 1A.X40 wiringNOTE: All “GND” signals are connected together and isolated with main power island.X6 connectorX6 connector is used for Local Bus extensions, such as DO, DI, AO, AO or RTD module can be connected in this bus.2.2.4HDMIDirectly connected to the Raspberry PI CM4 board with TVS array. The default display in EdgeLogix-RPI-1000conforms to the HDMI standard.2.2.5EthernetEthernet interface is same as Raspberry PI CM4,10/100/1000-BaseT supported, available through the shielded modular jack. Twisted pair cable or shielded twisted pair cable can be used to connect to this port.2.2.6USB HOSTThere are two USB interfaces at the connector panel. The two ports share the same electronic fuse. NOTE: Max current for both ports is limited to 1600ma.2.2.7Console (USB TYPEC)CM4 USB-UART Bridge USB TYPECThe design of console used a USB-UART converter, most OS of the computer have the driver, if not, the link below may be useful:/products/CH9102.htmlThis port is used as a Linux console default. You can log into the OS use the settings of 115200,8n1(Bits: 8, Parity: None, Stop Bits: 1, Flow Control: None).A terminal program such as putty is needed, too.The default user name is pi and password is raspberry.2.2.8LEDEdgeLogix-RPI-1000 use three green/red dual color LED as outside indicators.LED1: green as power indicator and red when 4G/LTE active.LED2: green as signal indicator and red as user programmable led connected to GPIO13, high active and programmable.LED3: LED3 is used for Local BUS, it is to be defined in future. It indicates the communication between main and extensions.2.2.9SMA ConnectorThere are four SMA Connector holes for antennas. The antenna types are very depended on what modules fitted into the Mini-PCIe socket. The A1 is recommended for WI-FI signal from CM4 module and A2 for cellular.NOTES:The functions of the antennas are not fixed, maybe adjusted to cover other usage.2.2.10SIM card slotThe sim card is only needed in cellular (4G/LTE or others based on cellular technology) mode.NOTES: O nly Standard Sim card is accepted, pay attention to the card size.2.2.11 LCD panel and keyboardThe LCD display allows you to view meter data and perform basic configuration, or used for system diagnosis.◆LCD panelThe LCD display has the resolution of 800x480 pixel. It has an individual display controller connector to main CPU (Raspberry PI CM4) via SPI interface. The program model is full open to customers.SPI RGBKey x 4The backlight dims after a defined period of inactivity. When the meter detects an unacknowledged activehigh priority alarm, the display flashes until the alarm is acknowledged. ◆Home buttonPressing the home button takes you to the associated menu screen. If you are in a data screen, pressing the home button takes you to the display menu, and pressing home twice takes you to the summary display screen. If you are in a setup screen, pressing home takes you to the setup menu, and pressing home again takes you to the display menu. Function keys◆ Arrow buttonThe two arrow keys can be used for navigation and selection.◆ Enter buttonNormally used as confirm or Enter.2.3 GPIO MultiplexOverview of the GPIO usage from CM4, most of the GPIO have the fixed function as list.The Mainboard spans the inner width of the device and has outward-facing ports on frond and up sides. It is mounted to the heat sink with four M3x6 pan head screws.EdgeLogix-RPI-1000 itself has two mini-PCIe card slots, one for 4G/LTE with SIM cad support and the other has SPI signals.The orange area is the rough PCIe add-on card position, only one M2x5 screw is needed.The table below show all the signals. Full size Mini-PCIe card are supported.NOTE 1: All blank signals are NC (not connect).NOTE 2: 4G_PWR is the individual power supply for Mini-PCIe card. It can be shut down or turn on by the GPIO22 of CM4, the control signal is high active.NOTE 3:4G_LED signal is connected to LED1 internallyNOTE 1: SPI1 signals are used only for LoraWAN card, such as SX1301, SX1302. NOTE 2:All PCIe signals are optional.2.4.2PCIe subsystemThe CM4 itself has only on channel of PCIe 1x. The design of EdgeLogix-RPI-1000 use a switch to extern 3 NIC cards and one optional channel to mini PCIe 2 slots.2.4.3LCD board2.4.4Signal board3.Drivers and Programming3.1 LEDThe is a LED used as user indicator, refer to 2.2.8.Use LED2 as a mexample to test the function.$ sudo -i #enable root account privileges$ cd /sys/class/gpio$ echo 13 > export #GPIO21 which is user LED of LED2$ cd gpio13$ echo out > direction$ echo 1 > value # turn on the user LED, HIGH activeOR$ echo 0 > value # turn off the user LED3.2 Serial Port (RS232 and RS485)There are two individual serial ports in the system. The /dev/ttyACM1 as RS232 port and/dev/ttyACM0 as RS485 port. Use RS232 as a example.$ python>>> import serial>>> ser=serial.Serial('/dev/ttyACM1',115200,timeout=1)>>> ser.isOpen()true>>> ser.isOpen()>>> ser.write('1234567890')103.3 Cellular over Mini-PCIe◆Use Quectel EC20 as a example and follow the steps:1.Insert the EC20 into Mini-PCIe socket and sim card in related slot, connect the antenna.2.Log in the system via console use pi/raspberry.3.Turn on the power of Mini-PCIe socket and release the reset signal.$ sudo -i #enable root account privileges$ cd /sys/class/gpio$ echo 22 > export #GPIO22 which is POW_ON signal$ echo 5 > export #GPIO5 which is reset signal$ cd gpio22$ echo out > direction$ echo 1 > value # turn on the power of Mini PCIeAND$ cd gpio5$ echo out > direction$ echo 1 > value # release the reset signal of Mini PCIeNOTE: Then the LED of cellular is start to flash.4.Check the device:$ lsusb$ Bus 001 Device 005: ID 2c7c:0125 Quectel Wireless Solutions Co., Ltd. EC25 LTE modem ……$ dmesg$……[ 185.421911] usb 1-1.3: new high-speed USB device number 5 using dwc_otg[ 185.561937] usb 1-1.3: New USB device found, idVendor=2c7c, idProduct=0125, bcdDevice= 3.18 [ 185.561953] usb 1-1.3: New USB device strings: Mfr=1, Product=2, SerialNumber=0[ 185.561963] usb 1-1.3: Product: Android[ 185.561972] usb 1-1.3: Manufacturer: Android[ 185.651402] usbcore: registered new interface driver cdc_wdm[ 185.665545] usbcore: registered new interface driver option[ 185.665593] usbserial: USB Serial support registered for GSM modem (1-port)[ 185.665973] option 1-1.3:1.0: GSM modem (1-port) converter detected[ 185.666283] usb 1-1.3: GSM modem (1-port) converter now attached to ttyUSB2[ 185.666499] option 1-1.3:1.1: GSM modem (1-port) converter detected[ 185.666701] usb 1-1.3: GSM modem (1-port) converter now attached to ttyUSB3[ 185.666880] option 1-1.3:1.2: GSM modem (1-port) converter detected[ 185.667048] usb 1-1.3: GSM modem (1-port) converter now attached to ttyUSB4[ 185.667220] option 1-1.3:1.3: GSM modem (1-port) converter detected[ 185.667384] usb 1-1.3: GSM modem (1-port) converter now attached to ttyUSB5[ 185.667810] qmi_wwan 1-1.3:1.4: cdc-wdm0: USB WDM device[ 185.669160]qmi_wwan 1-1.3:1.4 wwan0: register 'qmi_wwan' at b-1.3, WWAN/QMI device,xx:xx:xx:xx:xx:xxxx:xx:xx:xx:xx:xx is the MAC address.$ ifconfig -a……wwan0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500inet 169.254.69.13 netmask 255.255.0.0 broadcast 169.254.255.255inet6 fe80::8bc:5a1a:204a:1a4b prefixlen 64 scopeid 0x20<link>ether 0a:e6:41:60:cf:42 txqueuelen 1000 (Ethernet)RX packets 0 bytes 0 (0.0 B)RX errors 0 dropped 0 overruns 0 frame 0TX packets 165 bytes 11660 (11.3 KiB)TX errors 0 dropped 0 overruns 0 carrier 0 collisions 05.How to use AT command$ miniterm --- Available ports:--- 1: /dev/ttyAMA0 'ttyAMA0'--- 2: /dev/ttyttyACM0 'CP2105 Dual USB to UART Bridge Controller'--- 3: /dev/ttyttyACM1 'CP2105 Dual USB to UART Bridge Controller'--- 4: /dev/ttyUSB0 'Android'--- 5: /dev/ttyUSB1 'Android'--- 6: /dev/ttyUSB2 'Android'--- 7: /dev/ttyUSB3 'Android'--- Enter port index or full name:$ miniterm /dev/ttyUSB3 115200Some useful AT command :⚫AT //should return OK⚫AT+QINISTAT //return the initialization status of (U)SIM card, the response should be 7⚫AT+QCCID //returns the ICCID (Integrated Circuit Card Identifier) number of the (U)SIM card6.How to dial$su root$ cd /usr/app/linux-ppp-scripts$./quectel-pppd.shThen the 4G led is flashing.If success, the return like this:7.Add the router path$ route add default gw 10.64.64.64 or your gateway XX.XX.XX.XXThen have a test$ ping 3.4 WDT3.4.1Block Diagram of WDTThe WDT module have three terminals, input, output and LED indicator.Note:3.4.2How it works1.System POWER ON.2.Delay 200ms.3.Send WDO a negative pulse with 200ms low level to reset the system.4.Pull up WDO.5.Delay 120 seconds while the indicator flashing (typical 1hz).6.Turn off the indicator.7.Wait for 8 pulses at WDI to active WDT module and light the LED.8.Get Into WDT-FEED mode, at least one pulse should be feed into WDI in at least every 2 seconds, ifnot, the WDT module should output a negative pulse to reset the system.9.Goto 2.3.5 RTC3.5.1WiringThe chip of RTC is PCF8563 or other compatible. It is mounted on the system I2C bus.The OS itself has the driver inside, only we need are some configurations.3.5.2How it worksOpen /etc/rc.local AND add 2 lines:echo " pcf8563 0x51" > /sys/class/i2c-adapter/i2c-1/new_devicehwclock -sThen reset the system and the RTC is working.Note:1.make sure the i2c-1 driver point is open, and the point is closed default.2. the estimated backup time of the RTC is 10 days.3.6 LoraWAN over Mini-PCIe3.7 Signal board4.Software Basics5.Applications6.Electrical specifications6.1 Power consumptionThe power consumption of the EdgeLogix-RPI-1000 strongly depends on the application, the mode of operation and the peripheral devices connected. The given values have to be seen as approximate values. The following table shows power consumption parameters of the EdgeLogix-RPI-1000:Note: On condition of power supply 24V, no add-on card in sockets and no USB devices.6.2 Power supply7.Mechanical。
MAX1000 用户手册

MAX-1000 矩阵系统用户手册HONEYWELL Co,. Ltd.目录1.综述1.1 简介1.2 CCTV键盘1.3 模拟操作面板1.4 其它设备1.5 本手册所作的前提假定1.6 本手册所用的惯例击键数字范围注意要点监示器信息1.7 厂商联络方式1.8 商标注明2 启动2.1 输入你的选择号码,怎样和为什么?2.2 监示器选择2.3 摄像机选择2.4 PTZ摄像机控制2.5 VCR选择2.6 CCTV键盘控制VCR2.7 摄像机录像2.8 辅助装置和复用器3 扫描序列的使用3.1 什么是扫描序列?什么是扫描序列3.2 启动扫描序列3.3 中止扫描序列3.4 暂停扫描序列3.5 产生新的扫描序列3.6 扫描序列的编辑用新的摄像机选择进行替换删除该摄像机选择插入新的摄像机选择3.7 改变停顿周期3.8 为一个摄像机增加停顿4 宏语言的使用4.1 什么是宏程序?齐投摄像机选择摄像机漫游自动控制4.2 宏语言的执行4.3 产生一个新的宏程序4.4 宏程序的删除4.5 我能编辑一个宏程序吗?5 警报管理5.1 什么是警报?5.2 外部警报输入5.3 摄像机故障警报视频丢失低电平视频5.4 PTZ解码箱故障警报5.5 PTZ解码箱防拆警报5.6 VCR警报5.7 其它装置警报5.8 警报堆栈5.9 在警报堆栈上移位5.10 清除警报6 键盘的其它功能6.1 快速摄像机选择6.2 设置摄像机视场(PTZ预置位) 6.3 调用摄像机视场(PTZ预置位) 6.4 摄像机PTZ复位6.5 选择代用摄像机6.6 隐藏显示的字符6.7 显示SMARTEXTTM7 菜单系统7.1 什么是菜单系统?访问菜单系统退出菜单系统7.2 从菜单上选择移动菜单进入窗口7.3 键盘操作员登记7.4 键盘操作员注销7.5 激活/中止视频输入中止一个摄像机激活一个摄像机7.6 锁定/释放视频输入控制锁定一个PTZ摄像机释放一个PTZ摄像机锁定/释放一个PTZ摄像机7.7 锁定/释放视频输出选项锁定视频输出选项释放视频输出选项锁定/释放视频输出选项7.8 中止/激活警报输入中止警报输入激活警报输入9.3 字符显示定时9.4 监示器黑屏9.5 黑屏暂停9.6 监示器访问9.7 操作员对系统的访问9.8 操作员的级别划分9.9 CCTV键盘定时9.1 0 自动注销9.11 摄像机故障检测视频丢失低电平视频1 0 排除提示10.1 摄像机选择第一章概述1.1简介MAX一1000 CCTV管理系统是一个强功能的计算机控制视频切换矩阵。
罗克韦尔自动化 MicroLogix 1400 可编程控制器 说明书
MicroLogix 1400 Programmable Controllers Bulletin 17662Rockwell Automation Publication 1766-RM001J-EN-P - June 2023MicroLogix 1400 Programmable Controllers Reference ManualImportant User InformationRead this document and the documents listed in the additional resources section about installation, configuration, and operation of this equipment before you install, configure, operate, or maintain this product. Users are required to familiarize themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws, and standards.Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required to be carried out by suitably trained personnel in accordance with applicable code of practice.If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be impaired.In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use or application of this equipment.The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for actual use based on the examples and diagrams.No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software described in this manual.Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is prohibited.Throughout this manual, when necessary, we use notes to make you aware of safety considerations.These labels may also be on or inside the equipment to provide specific precautions.The following icon may appear in the text of this document.Rockwell Automation recognizes that some of the terms that are currently used in our industry and in this publication are not in alignment with the movement toward inclusive language in technology. We are proactively collaborating with industry peers to find alternatives to such terms andmaking changes to our products and content. Please excuse the use of such terms in our content while we implement these changes.WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment, which may lead to personal injury or death, property damage, or economic loss.ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.IMPORTANT Identifies information that is critical for successful application and understanding of the product.SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous voltage may be present.BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may reach dangerous temperatures.ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to potential Arc Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL Regulatory requirements for safe work practices and for Personal Protective Equipment (PPE).Identifies information that is useful and can help to make a process easier to do or easier to understand.Table of ContentsPrefaceAbout This Publication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Download Firmware, AOP, EDS, and Other Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Summary of Changes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Additional Resources. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Chapter 1I/O Configuration Embedded I/O. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19MicroLogix 1400 Expansion I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Expansion I/O Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Addressing Expansion I/O Slots. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20MicroLogix 1400 Expansion I/O Memory Mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Discrete I/O Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Analog I/O Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Specialty I/O Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24I/O Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Addressing Details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26I/O Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Input Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Output Forcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Input Filtering. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Analog Inputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Analog Input Filter and Update times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Input Channel Filtering. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Convert Analog Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Convert Analog Input Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Analog Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Latching Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Configure Expansion I/O Using RSLogix 500/RSLogix Micro . . . . . . . . . . . . . . . . . . . . . . . . 31Chapter 2Controller Memory and File TypesController Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 File Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 User Memory. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 View Controller Memory Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 Data Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 Protect Data Files During Download . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 Data File Download Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 Static File Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 Static File Protection with Data File Download Protection . . . . . . . . . . . . . . . . . . . . . . 37 Set Static File Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 Program Password Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 Program Password Protection for Series B (Enhanced Password Security). . . . . . . . 40 Clear the Controller Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 Allow Future Access Setting (OEM Lock). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 Web View Disable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Rockwell Automation Publication 1766-RM001J-EN-P - June 20233Table of ContentsLCD Edit Disable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Chapter 3Function Files Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Real-time Clock Function File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Write Data to the Real-time Clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Real-time Clock Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47RTC Battery Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47RTA - Real-time Clock Adjust Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48Memory Module Information Function File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48Base Hardware Information Function File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Communications Status File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Ethernet Communications Status File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Input/output Status File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Chapter 4Programming Instructions Overview Instruction Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67 Use the Instruction Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 Addressing Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 Example – Using Indirect Addressing to Duplicate Indexed Addressing. . . . . . . . . . . 71Chapter 5Using the High-speed Counter and Programmable Limit Switch High-speed Counter Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 Programmable Limit Switch Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 High-speed Counter (HSC) Function File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 High-speed Counter Function File Sub-elements Summary . . . . . . . . . . . . . . . . . . . . . . . . 74 HSC Function File Sub-elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 HSL - High-speed Counter Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 RAC - Reset Accumulated Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90 Programmable Limit Switch (PLS) File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90 PLS Data File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90 PLS Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 Addressing PLS Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 PLS Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92Chapter 6Using High-Speed Outputs PTO - Pulse Train Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95Pulse Train Output Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95Momentary Logic Enable Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Standard Logic Enable Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Pulse Train Outputs (PTOX) Function File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Pulse Train Output Function File Sub-elements Summary. . . . . . . . . . . . . . . . . . . . . . . . . . 99PWM – Pulse-width Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107PWM Function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107Pulse-width Modulation (PWMX) Function File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108Pulse Width Modulated Function File Elements Summary. . . . . . . . . . . . . . . . . . . . . . . . . 1084Rockwell Automation Publication 1766-RM001J-EN-P - June 2023Table of ContentsChapter 7Relay-Type (Bit) Instructions XIC - Examine if Closed/XIO - Examine if Open. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113OTE - Output Energize . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114OTL - Output Latch/OTU - Output Unlatch. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115ONS - One Shot. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116OSR - One Shot Rising/OSF - One Shot Falling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116Chapter 8Timer and Counter Instructions Timer Instructions Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119Timer Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120Repeat Timer Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121TON - Timer, On-Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121TOF - Timer, Off-Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121RTO - Retentive Timer, On-Delay. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122How Counters Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123Using the CTU and CTD Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123Using Counter File Control and Status Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124CTU - Count Up / CTD - Count Down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124RES - Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124Chapter 9Compare Instructions Using the Compare Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127EQU - Equal/NEQ - Not Equal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128GRT - Greater Than/LES - Less Than . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128GEQ - Greater Than or Equal To/LEQ - Less Than or Equal To . . . . . . . . . . . . . . . . . . . . . 129MEQ - Mask Compare for Equal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129LIM - Limit Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Chapter 10Math Instructions General Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Use the Math Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Overflow Trap Bit, S:5/0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Use the Floating Point (F) Data File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135File Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135Definitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136Floating Point Exception Values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136LSB Round-to-Even Rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136Addressing Floating Point Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137Programming Floating Point Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137ADD - Add/SUB - Subtract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137MUL - Multiply/DIV - Divide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138NEG - Negate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138CLR - Clear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138ABS - Absolute Value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138SCL - Scale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139SCP - Scale with Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140Rockwell Automation Publication 1766-RM001J-EN-P - June 20235Table of ContentsSpecial Considerations when Using Floating Point Parameters. . . . . . . . . . . . . . . . . 141Other Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141SQR - Square Root . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141SIN - Sine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142COS - Cosine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144TAN - Tangent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145ASN - Arc Sine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146ACS - Arc Cosine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147ATN - Arc Tangent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .148Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149DEG - Radians to Degrees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150RAD - Degrees to Radians . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151LN - Natural Log. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153LOG - Base 10 Logarithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154XPY - X Power Y . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155CPT - Compute . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157Chapter 11Application-Specific Instructions RHC - Read High-speed Clock. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159 Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160 RPC - Read Program Checksum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160 Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161 TDF - Compute Time Difference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161 Instruction Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162Chapter 12Conversion Instructions Using Decode and Encode Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163DCD - Decode 4 to 1-of-16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163ENC - Encode 1-of-16 to 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165FRD - Convert from Binary Coded Decimal (BCD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165FRD Instruction Source Operand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166TOD - Convert to Binary Coded Decimal (BCD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168TOD Instruction Destination Operand. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Changes to the Math Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169GCD - Gray Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1696Rockwell Automation Publication 1766-RM001J-EN-P - June 2023Table of ContentsUpdates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169Chapter 13Logical Instructions Using Logical Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172AND - Bit-Wise AND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172OR - Logical OR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172XOR - Exclusive OR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173NOT - Logical NOT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173Chapter 14Move Instructions MOV - Move . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175Using the MOV Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176MVM - Masked Move . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176Using the MVM Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177Updates to Math Status Bits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178Chapter 15File Instructions CPW - Copy Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179COP - Copy File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180FLL - Fill File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181BSL - Bit Shift Left . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182BSR - Bit Shift Right . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183FFL - First In, First Out (FIFO) Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184FFU - First In, First Out (FIFO) Unload . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186LFL - Last In, First Out (LIFO) Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187LFU - Last In, First Out (LIFO) Unload . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189SWP - Swap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190Chapter 16Sequencer Instructions SQC - Sequencer Compare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193SQO - Sequencer Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195SQL - Sequencer Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197Chapter 17Program Control Instructions JMP - Jump to Label . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199LBL - Label . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199JSR - Jump to Subroutine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200SBR - Subroutine Label . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200RET - Return from Subroutine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200SUS - Suspend . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200TND - Temporary End . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200END - Program End . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201MCR - Master Control Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201Rockwell Automation Publication 1766-RM001J-EN-P - June 20237。
1000系列视频编码器 快速入门(V1.12)-整本手册

H3C EC1000系列视频编码器快速入门杭州华三通信技术有限公司资料版本:T1-08017L-20100830-C-1.12声明Copyright © 2007-2010 杭州华三通信技术有限公司及其许可者版权所有,保留一切权利。
未经本公司书面许可,任何单位和个人不得擅自摘抄、复制本书内容的部分或全部,并不得以任何形式传播。
H3C、、Aolynk、、H3Care、、TOP G、、IRF、NetPilot、Neocean、NeoVTL、SecPro、SecPoint、SecEngine、SecPath、Comware、Secware、Storware、NQA、VVG、V2G、V n G、PSPT、XGbus、N-Bus、TiGem、InnoVision、HUASAN、华三均为杭州华三通信技术有限公司的商标。
对于本手册中出现的其它公司的商标、产品标识及商品名称,由各自权利人拥有。
由于产品版本升级或其他原因,本手册内容有可能变更。
H3C保留在没有任何通知或者提示的情况下对本手册的内容进行修改的权利。
本手册仅作为使用指导,H3C尽全力在本手册中提供准确的信息,但是H3C并不确保手册内容完全没有错误,本手册中的所有陈述、信息和建议也不构成任何明示或暗示的担保。
技术支持用户支持邮箱:customer_service@技术支持热线电话:800-810-0504(固话拨打)400-810-0504(手机、固话均可拨打)网址:资料获取方式资料获取方式您可以通过H3C网站()获取最新的产品资料:H3C网站与产品资料相关的主要栏目介绍如下:z[产品技术]:可以获取产品介绍和技术介绍的文档。
z[解决方案]:可以获取解决方案类资料。
z[服务支持/文档中心]:可以获取安装类、配置类产品资料。
z[服务支持/软件下载]:可以获取与软件版本配套的资料。
资料意见反馈如果您在使用过程中发现产品资料的任何问题,可以通过以下方式反馈:E-mail:info@感谢您的反馈,让我们做得更好!前言本书简介《H3C EC1000系列视频编码器快速入门》主要介绍H3C EC1000系列视频编码器(下文简称EC1000)的设备简介、安装和登录Web界面。
xl1000

第一章:XL1000单片机综合仿真试验仪系统简介1.1 系统简介 (2)1.2各个模块接口的定义 (4)第二章:快速入门篇- 跟我来用XL1000作跑马灯实验2.1软件安装 (6)2.2软件界面介绍 (6)2.3软件操作 (7)第三章 USB接口安装指南3.1 USB驱动程序安装 (9)3.2特别情况下的usb安装 (11)第四章ISP 下载部份的应用4.1 ISP 下载部份介绍 (12)4.2 XL1000下载头之插头定义 (13)4.3常用芯片的ISP相关引脚连接方法 (13)第五章 XL1000 仿真操作指南5.1 仿真概述 (15)5.2 KEIL UV2软件操作指南 (16)第六章:XL1000单片机系统实验MCS-51单片机引脚说明 (18)实验1 最简单的八路跑马灯 (19)实验2 用xl1000试验仪做一个8路彩灯控制器 (21)实验3 8路指示灯读出8路拨动开关的状态 (22)实验4 数码管静态扫描 (23)实验5 数码管动态扫描显示01234567 (24)实验6 端口按键判断技术(按键显示数字) (27)实验7 矩阵按键识别技术 (29)实验8 74LS14反向器实验 (30)实验9 74LS138 38译码器部分实验 (31)实验10 74LS164 串入并出实验 (32)实验11 74LS165并入串出实验 (33)实验12 DA转换dac0832的原理与应用 (35)实验13 模拟/数字转换器ADC0804 (37)实验14 小喇叭警报器试验 (39)实验15 红外线遥控试验 (40)实验16 汉字显示屏显示倚天一出宝刀屠龙 (43)实验17 1602液晶显示屏显示A (45)实验18 8155试验 (47)实验19 24C02储存开机次数实验 (49)实验20 步进电机实验 (51)实验21 93c46 演示程序 (52)实验22 串行双向通信实验 (54)实验23 综合实验 18B20数字温度显示系统 (57)第七章怎样产生hex文件? Dais集成开发环境使用 (59)第八章常见问题解答 (61)第九章系统配置和售后服务指南 (62)注意!无论您是高手还是新手,第一次使用前请用1小时时间仔细阅读此文件,开卷有益第一章: Xl1000单片机综合仿真试验仪系统简介1.1系统简介XL1000单片机综合仿真试验仪(以下简称XL1000)是深圳市学林电子有限公司( 51测试网 )综合多年经验开发出的多功能8051单片机平台(兼容AVR/PIC单片机的部份烧写实验功能)。
MAX1000用户手册分解

MAX-1000 矩阵系统用户手册HONEYWELL Co,. Ltd.目录1.综述1.1 简介1.2 CCTV键盘1.3 模拟操作面板1.4 其它设备1.5 本手册所作的前提假定1.6 本手册所用的惯例击键数字范围注意要点监示器信息1.7 厂商联络方式1.8 商标注明2 启动2.1 输入你的选择号码,怎样和为什么?2.2 监示器选择2.3 摄像机选择2.4 PTZ摄像机控制2.5 VCR选择2.6 CCTV键盘控制VCR2.7 摄像机录像2.8 辅助装置和复用器3 扫描序列的使用3.1 什么是扫描序列?什么是扫描序列3.2 启动扫描序列3.3 中止扫描序列3.4 暂停扫描序列3.5 产生新的扫描序列3.6 扫描序列的编辑用新的摄像机选择进行替换删除该摄像机选择插入新的摄像机选择3.7 改变停顿周期3.8 为一个摄像机增加停顿4 宏语言的使用4.1 什么是宏程序?齐投摄像机选择摄像机漫游自动控制4.2 宏语言的执行4.3 产生一个新的宏程序4.4 宏程序的删除4.5 我能编辑一个宏程序吗?5 警报管理5.1 什么是警报?5.2 外部警报输入5.3 摄像机故障警报视频丢失低电平视频5.4 PTZ解码箱故障警报5.5 PTZ解码箱防拆警报5.6 VCR警报5.7 其它装置警报5.8 警报堆栈5.9 在警报堆栈上移位5.10 清除警报6 键盘的其它功能6.1 快速摄像机选择6.2 设置摄像机视场(PTZ预置位) 6.3 调用摄像机视场(PTZ预置位) 6.4 摄像机PTZ复位6.5 选择代用摄像机6.6 隐藏显示的字符6.7 显示SMARTEXTTM7 菜单系统7.1 什么是菜单系统?访问菜单系统退出菜单系统7.2 从菜单上选择移动菜单进入窗口7.3 键盘操作员登记7.4 键盘操作员注销7.5 激活/中止视频输入中止一个摄像机激活一个摄像机7.6 锁定/释放视频输入控制锁定一个PTZ摄像机释放一个PTZ摄像机锁定/释放一个PTZ摄像机7.7 锁定/释放视频输出选项锁定视频输出选项释放视频输出选项锁定/释放视频输出选项7.8 中止/激活警报输入中止警报输入激活警报输入9.3 字符显示定时9.4 监示器黑屏9.5 黑屏暂停9.6 监示器访问9.7 操作员对系统的访问9.8 操作员的级别划分9.9 CCTV键盘定时9.1 0 自动注销9.11 摄像机故障检测视频丢失低电平视频1 0 排除提示10.1 摄像机选择第一章概述1.1简介MAX一1000 CCTV管理系统是一个强功能的计算机控制视频切换矩阵。
MAX1000操作说明
在键盘加电启动时,按住 LCD 显示屏左手边向上的键即可进 入键盘的设置模式。
在设置模式中,LCD 显示屏会提示用户用数字键盘输入需要的 信 息 。按 回 车 键 或 向 下 键 进 入 下 一 设 置 菜 单 ,按 向 上 的 键 返 回 上 一 设 置 菜 单 ,设 置 完 键 盘 地 址 、通 讯 波 特 率 、和 操 纵 杆 速 度 范 围 后 ,一 定 要 保 存 这 个 设 置 。保 存 设 置 时 要 确 保 键 盘 在 桌 面 上 是 水 平 的 ,操 纵 杆 要 回 到 0的 位 置 。 设 置 信 息 保 存 在 芯 片 中 一 直 到 下 一 次 被 修 改 。
2.1、输入需要的数字
如何、为什么要输入数字 ? 在这一本手册中讨论的几乎所有的 CCTV 键盘操作, 都和数字
的输入有联系。 例如:选择一台摄像机或者为一个轮巡设置一个时 间间隔等。
用 CCTV 键 盘 上 的 选 择 面 板 输 入 需 要 的 数 字 ,当 输 入 的 数 字 位 数
比设定的数字位数要少时,要按
1
北京文豪科贸有限公司广州分公司 Kenzo
第1章 概 述
1.1、简介
MAX-1000闭路电视 (CCTV) 管理系统实际上是一台控制视频切 换矩阵系统的计算机。 操作员可以通过 CCTV 键盘把不同的摄像机 图 像 切 换 在 不 同 的 监 视 器 上 显 示 ,操 作 员 也 可 以 通 过 CCTV 键 盘 上 的 操 纵 杆 和 其 它 键 对 有 上 、下 、左 、右 、镜 头 控 制 功 能 的 摄 像 机 进 行 遥控。
max-1000使用手册_secret

使用手册目录1.概述1.1简介1.2系统结构闭路电视键盘模拟屏视频切换子机柜串联组合输入/输出子机柜系统控制器应用程序模块1.3设备识别1.4本手册的使用惯例数字范围特别指出2.性能2.1实时时钟(R T C)2.2视频文本输入后文本预置文本2.3灵活的文本(S m a r t e x t T M)2.4隐藏监视器文本2.5监视器的无效2.6动态文本定位2.7黑屏暂停2.8信号源组合2.9使用C C T V键盘访问通道2.10操作员访问系统2.11列入优先的操作员2.12闭路电视键盘暂停功能2.13自动结束2.14远程控制P T Z摄像机、V C R等P T Z摄像机标准设备控制灵活的设备控制2.15摄像机故障检测视频丢失低电平视频高电平视频2.16视频扫描序列防护观光巡扫2.17宏序列2.18系统宏程序库2.19冷启动宏2.20热启动宏2.21通常报警摄像机故障报警P T Z现场故障报警2.22报警显示分组2.23报警栈2.24辅助输出控制3.基本概念3.1M A X-1000®闭路电视监控系统3.2视频矩阵3.3串联选择视频输入45号的实例选择视频输入3号的实例3.4组合预选子机柜组合器子机柜连接子机柜选择视频输入的实例3.5文本插入3.6子机柜定址有30个视频输出通道的系统有40路输出通道的系统有80路输出通道的系统3.7网络和中继中继线路阻塞管理3.8控制设备P T Z摄像机直接驱动P T Z遥控P T Z现场视频录像机直接V C R控制R S-232V C R接口红外V C R接口电视矩阵V C R接口标准设备控制灵活的设备控制4.模拟屏4.1简化操作环境4.2模拟屏的操作4.3模拟屏的配置M P-88模块M P-88主模块M P-88从模块M P-88模块的优点M P-88的配置为M P-88模块分配插槽一个实例4.4模拟屏的编程按钮(外部报警输入)L E D显示器辅助输出控制5.启动5.1M A X-1000®系统环境5.2S E T M A X配置编辑器从M S-D O S运行S E T M A X从M A X-1000®运行S E T M A X5.3S E T M A X主菜单5.4使用编辑器的环境数字输入字母数字输入前缀数字输入数字范围字段范围5.5屏重叠5.6编辑器命令5.7快命令选择快隐藏快拷贝快移动快选择快将快写入临时文件将临时文件写入快打印快5.8文件命令跳转到另一行保存文件装载文件清工作区扩展工作区撤销工作区5.9状态页5.10把你的新配置保存到磁盘5.11返回到M A X-1000®闭路电视监控系统6.系统的使用6.1预置新系统6.2视频输入信号源引用号(R E F)信号源设备类型(T Y P E)信号源设备号(N o)信号源组号(S G)信号源说明文本(D E S C R I P T I O N-T E X T)子机柜I D号(S U B)视频输入号(I N P)旁路的子机柜I D号(C M B)组合器I D号(C I N)网络信号源(N E T-S O U R C E)备用摄像机(A C N)备用摄像机的视窗信号源控制子机柜I D号(C I D)信号源控制子机柜插槽号(C S L)信号源控制子机柜远程P T Z现场号(C S I)有效的信号源控制(--C T R L--)视频信号源锁定控制(C L K)视频信号源禁用标志的默认状态(S D S)预置文本子机柜I D号(P I D)预置文本插槽号(P S L)水平位置(X)垂直位置(Y)动态视频均衡(D E Q)默认的宏设备标志(01--F L G--16)视频故障探测器插槽号(F S L)视频故障启动宏(S T A R T-M A C R O)视频故障结束宏(F I N I S H-M A C R O)6.3视频输出视频输出通道插槽号(S L T)通道设备类型(T Y P E)通道设备号(N o)通道说明文本(D E S R I P T I O N-T E X T)文本插入子机柜I D号(T I D)文本插入子机柜插槽号(T S L)文本插入子机柜显示状态(T D S)文本显示的水平位置(X)文本显示的垂直位置(Y)起动文本行(O E T L)文本显示暂停时间(T/O)默认的电源通视频输入选择(D F T)默认的电源通扫描序列号(S E Q)扫描序列默认模式(S C A N)通道锁定状态(L C R)可访问的信号源组(0---S G---50)报警显示组(1--A G--50)用键盘访问输出通道(1--K B--32)默认的宏设备标志(01--F L G--16)6.4序列表扫描序列默认模式(S C A N)序列类型(T Y P E)扫描序列的信号源组(S G)扫描序列说明文本(D E S C R I P T I O N-T E X T)扫描序列锁定(L O C K)扫描序列停止周期(D W L)摄像机选择输入项(0199)6.5定义闭路电视键盘键盘设备号(K B)键盘说明文本(D E S C R I P T I O N-T E X T)使键盘能够使用(E N B)默认的键盘操作员(D K O)默认的监视器选择(D F M)键盘可闻声状态(A U D)默认的L C D显示方式(L C D)后事件的类型(-T P E-)后事件宏(P O S T-E V E N T-M A C R O)默认的宏设备标志(01--F L G--16)6.6截取键盘键截取键引用号(R E F)截取键名字(D E S C R I P T I O N)键码号(K E Y)键盘I D号(1--K B--32)置换宏序列(K E Y-R E P L A C E M E N T-M A C R O)键释放宏序列(K E Y-R E L E A S E-M A C R O) 6.7键盘操作员操作员引用号(O P R)操作员名字(O P E A T O R-N A M E)操作员优先权码(P R I)键盘暂停时间(K T O)自动结束周期(A S O)键盘I D号(1--K B--32)视频信号源组(0--S G--50)操作员配置特权(O C P)特种访问特权(S A P)特种控制特权(S C P)可访问的报警组(1--A G--50)使用菜单访问视频矩阵(V M A)其他的菜单访问级(M A L)个人识别号(P I N)登录宏序列(S O N-M A C R O)结束宏序列(S O F F-M A C R O)6.8外部报警输入报警引用号(A L M)报警组号(A G)报警说明文本(D E S C R I P T I O N.T E X T)报警模块子机柜I D号(A I D)报警模块子机柜插槽号(A S L)远程P T Z现场摄像机号(C A M)报警模块输入号(1--I P--8)报警正常状态,正常地锁定/打开(A N S)报警输入操作方式(M O D E)网络报警(N E T-A L A R M)报警禁止状态(A D S)报警启动宏(S T A R T-M A C R O)报警结束宏(F I N I S H-M A C R O)6.9编辑辅助输出控制输出引用号(C/O)输出控制说明(D E S C R I P T I O N)输出模块子机柜I D号(O I D)输出模块子机柜插槽号(O S L)远程P T Z现场的摄像机号(C A M)有效输出位(1--O P--8)网络辅助输出(N E T-A U X)默认的通电输出状态(D F T)6.10系统宏程序库宏引用号(R E F)宏说明文本(D E S C R I P T I O N)宏执行序列(M A C R O-E X E C U T I O N-S E Q U E N C E) 6.11特殊的参数(切记)文本插入行的用法预置文本显示状态系统轮询起动报警栈报警栈暂停视频电平故障打印机制表出错记录制表网络节点I D号主网络时钟时钟校正因子冷启动宏执行序列热启动复位宏执行序列中继阻塞-窃用法则默认的M A X-1000®测试方式6.12串行通讯端口端口号(P O R T)端口类型(T Y P E)说明I D表征码1-8(I D1-I D8)端口地址(A D D R)波特率(B A U D)控制状态(C T R L)6.13显示/清除出错记录文件6.14标题和登记6.15读特许协议6.16从磁盘装载全部数据6.17将全部改变保存到磁盘6.18打印全部配置数据选择打印机类型6.19备份全部配置数据备份的重要性完成磁盘拷贝6.20退出配置编辑器7.实例7.1视频输入固定式摄像机P T Z摄像机伪摄像机摄像机故障探测带有预置文本功能的摄像机网络摄像机视频盒式录像机7.2视频输出有文本的监视器监视器扫描编辑监视器自动黑监视器无文本的监视器网络远程监视器V C R输出通道7.3序列表常规扫描序列锁定的扫描序列保护观光巡扫序列网络扫描序列宏索引表7.4定义C C T V键盘闭路电视键盘1汽车停放K B2控制室3接收哑高级K B系统键盘编辑键盘7.5截取键盘的键选择M O N5解锁(水平左转)自动录像观察周围7.6键盘操作员默认的操作员主管人服务操作员约翰史密斯7.7外部报警输入东部周围休息室的前面(P I R)门接触报警高电平报警模拟屏按钮远程摄像机报警网络报警禁止P T Z篡改7.8辅助输出控制视频打印保持帧门撞锁远程继电器输出吊杆门打开/关闭报警指示器模拟屏L E D显示键盘状态L E D显示高电平状态输出网络辅助输出7.9系统宏程序库检验全门门(第一/第二)只是说明行管理报警监视器报警防区(有效的)报警防区(清除)7.10串行通讯端口键盘端口子机柜端口网络端口高电平端口打印机端口辅助端口出错记录端口测试端口附录A.1宏出错信息A.2宏出错报表A.3键盘键码A.4标准的宏命令A.5运行期错误第一章概述1.1简介M A X-1000®闭路电视(C C T V)监控系统(M A X-1000®C C T V M a n a g e m e n t s y s t e m)是全矩阵视频切换系统。
Amida1000指令介绍_SM40

SM40指令简介SM40板卡是用来供应和量测电压电流的精密量测单元,通过相应指令用户可以使其工作在电流源模式(可同时量测所提供的电流)、电流源模式(可同时量测所提供电压)、电压表模式、电流表模式。
在应用中为了进一步提高精度,在应用中SM40板卡设置了不同的电压电流档位,故在写程序的时候需特被注意选择合适的档位,SM40板卡共设置6个电压档位,7个电流档位,分别为:电压档位:±40V,±20V,±10V,±4V,±2V,±1V电流档位:±1A,±100mA,±10mA,±1mA,±100uA,±10uA,±1uA使用SM40时,首先要对其进行初始化,包括pmuSenseRemote/pmuSenseLocal设置、pmuConfigure设置、pmuFIMV/pmuFVMI设置;然后,通过pmuOn开启SM40,使其开始工作;然后可以使用pmuReadV/pmuReadI/pmuReadVI进行量测,读取所需要的参数;最后要通过pmuOff指令关闭SM40。
SM40指令的使用简介如下:1、设置量测模式Remote模式支持严格的四线制量测,Sense端可直接短接值待测点,能有效提高量测精度,缺省时系统默认为Remote模式。
示例:pmuSenseRemote(1); 设置SM40 CH1为Remote模式pmuSenseLocal(2); 设置SM40 CH2为Local模式2、设置板卡供应与量测的速度U16 integral:根据需要设定板卡的量测速度,系统默认为FAST模式,SM40板卡有四种模式可供选择“0”or “FAST”:100us“1”or “MEDIUM”: 1.6ms“2”or “SLOW”: 16.7ms“3”or “VSLOW”: 20ms示例:pmuConfigure(1 ,0); 设置SM40 CH1工作在FAST方式下pmuConfigure(2 ,MEDIUM); 设置SM40 CH2工作在MEDIUM方式下3、设置工作模式SM40加压测流float FV:即Force Value,设置需要SM40提供的电压值,单位伏特VU16 FR:即Force Range,为输出电压设置合适的电压档位,有效值为V_RANGE_1V or 0V_RANGE_2V or 1V_RANGE_4V or 2V_RANGE_10V or 3V_RANGE_20V or 4V_RANGE_40V or 5float CV:即Clamp Value,设置Clamp电流的电流值,单位安培AU16 CR:即Clamp Range,设置Clamp电流的合适档位,有效值,I_RANGE_1UA or 0I_RANGE_10UA or 1I_RANGE_100UA or 2I_RANGE_1MA or 3I_RANGE_10MA or 4I_RANGE_100MA or 5I_RANGE_1A or 6U16 OP:设置“DC”或“FIXED”模式,有效值DC or 0FIXED or 1Special:当float FV为零时,SM40等效为电流表使用,完全等效为一个电流表使用。
LM1000说明书

统用(1A 可供 4 台语音系统用)。
5
安装步骤
LM1000 用戶手冊
1、依 PABX 系统的号码安排及单机使用说明, 参照
接线图依序: (1) 将整流变压器插到市电插座上。 (2) 将 整 流 变 压 器 的 输 出 接 至 语 音 系 统 的
“DC12V”电源输入,同时注意状态指示 灯会闪亮,表示可正常工作。 (3) 安装多个语音系统者,请参考第 3 页,使 用 8 芯复接线复接。 (4) 接上分机线。
LM1000 用戶手冊
PABX 资料
语音系统能匹配大多数的 PABX 可即插即 用(转接键时间 0.13 秒以上,转接及取回外 线只使用转接键而不需功能码者)。但有些 PABX 转接或取回外线的操作方式较为特殊, 请先按照 PABX 的单机操作方式设定资料。
智能型语音系统除了一般自动总机之 转接功能外,又增加了一个公共语音信箱 以供留言,内藏语音及自动测试功能,让 装机更为简易。信号音智能模式及弹性号 码计划,让交换机连线更容易完成。
3、查询系统的段落/片语号码是从[接待语]拨至该段落所 按的号码,如下图所示。
接待语
M_1
-------------
M_9
M_11 -------
M_19
M_91 -------- M_99
14
LM1000 用戶手冊
4、查询语音播放完毕后,语音系统会播放[查询后引导语]。 5、段落号首 Y:1=查询段落 1,1×,1××,1×××
4
其它说明:
LM1000 用戶手冊
1、内置电池仅用于保持语音及资料,可外接
12V/7AH 电池作为不停电设备。
2、若外接电池极性错误,语音系统电源会自
动切断,请将整流变压器拔起,确认电
MachMotion 1000系列铣床控制器操作手册说明书

1000 Series Mill Control OPERATING MANUALSpecializing in CNC Automation and Motion Control2 | P a g eG0131This manual covers the operation of the 1000 Series Mill Control.Formatting Overview:•Menus, options, icons, fields, and text boxes on the screen will be bold (e.g. the Help icon).•Clickable buttons will be bold and within brackets (e.g. the [OK] button).•Directory names, commands, and examples of editing program files will appear in Courier New fontThis manual as well as all other MachMotion manuals can be found at Copyright © 2014, MachMotionAll rights reserved.P a g e | 3 1000 Series Mill ControlG0131Table of Contents1INTRODUCTION (5)1.1Control Startup (5)1.2Overview (5)2HOMING (6)3PROGRAMMED MOVEMENT (7)3.1MDI (7)3.2G-Code (7)3.2.1G-Code File Controls (8)3.2.2Running a G-Code File Example (8)3.2.3Running a G-Code File with the Single Block Option (9)3.2.4Block Delete Option (9)3.2.5Running a G-Code File with the Run From Here Option (9)3.2.6Tool Path Screen (10)3.3Advanced (10)3.3.1Dry Run (10)3.3.2M-S-T Lock (10)3.3.3Regen Tool Path (11)3.3.4Show Boundaries (11)3.3.5Jog Follow (11)4TOOLS, TOOL OFFSETS, AND CUTTER COMPENSATION (11)4.1Tools and Tool Offsets (11)4.1.1Fixed Tool Set Height (11)4.1.2Random Tool Set Height (11)4.1.3Auto Tool Setter (12)5SPINDLE CONTROL (13)5.1G-Code Spindle Control (13)5.2Manual Spindle Control (13)5.2.1Spindle (13)5.2.2Mist (14)5.2.3Coolant (14)6FIXTURE OFFSETS (14)7APPENDIX A – STARTUP PROCEDURE (15)8APPENDIX B (16)4 | P a g e8.1Warranty Information (16)8.2Additional Resources (16)P a g e | 5 1INTRODUCTION1.1Control Star tupTo open the control software double-click on the Mill profile icon on the desktop or open the Mach4 Loader and choose a profile from the list.FIGURE 1 – CONTROL ICONS1.2OverviewThis manual gives the process for basic operation of a mill using the MachMotion control screen. Depending on the control type, the control screen will display slightly different. The two screens are shown below, followedby a brief summary of the different sections of the screen.FIGURE 2A – STANDARD CONTROL SCREEN OVERVIEW6 | P a g eFIGURE 2B – WIDESCREEN CONTROL SCREEN OVERVIEWFor a quick reference, the description of each zone is located below.1.The tool path window shows the path the tool will take when a G-Code file is loaded. G-Code linenumber display (can also show percentage complete with setting change) and part counter display.2.Unlock the screen to access certain features/settings. Use DRO mode to measure or run in manualmode. DRO mode is has no effect on fixture offsets.3.The axis DROs show the current location and homing state (Green DROs indicate part coordinates,brown DROs indicate machine coordinates. The axis label LEDs turn green when the axis is homed).4.The axes DROs display the remaining travel distance to complete the current line of G-Code. Changebetween part and machine coordinates by clicking [Machine Coordinates].5.Feed rate control and status6.Spindle control and status, Mist & Coolant, and Auxiliary Buttons. Change between tabs for offsetsand settings.7.The Control section is used to Enable/Disable system, Start and Stop programs, and Feed Hold. Resetwill rewind the program and return to the default state of G-Code settings.8.G-Code control and other functions9.View current/last status message. Click [History] to view status messages and clear status line.10.Displays current G-Code modals and the state of the control.2HOMINGTo home the mill, begin by enabling the system (Figure 2 #7). Click [UnLocked] button (Figure 3). To home all axes press the [Home All] button. Each axis can also be homed using the individual axis home buttons. Once an axis has been homed, the axis LED display will be green.P a g e | 7FIGURE 3 – MILL HOMING3PROGRAMMED MOVEMENT3.1MDITo command a movement using the MDI feature, press the MDI tab.FIGURE 4 - MDI TAB SELECTIONEnter the desired G-Code command into the field and press [Cycle Start] to execute the command(s). Theup/down arrow buttons will scroll through the history of cycled commands.FIGURE 5 - EXAMPLE MDI COMMAND3.2G-CodeThe primary method of commanding motion is using G-Code files. G-Code files can be hand written, generated by a wizard, or generated from CAD files using a CAM program.8 | P a g e3.2.1G-Code File ControlsFIGURE 6 - G-CODE CONTROLS1.Cycle Start – Starts a loaded G-Code file2.Feed Hold – Pauses a running G-Code file which can then be restarted by pressing Cycle Start3.Cycle Stop – Stops a running G-Code file or other commanded movement4.Reset – Rewinds a loaded G-Code file to the beginning and resets G-Code modals to defaultconfiguration5.Load – Opens a file browser to select an existing G-Code file6.Recent – Opens a selection window with the ten most recent run G-Code files7.Edit – Opens a loaded G-Code file to allow easy editing8.Close – Closes the loaded G-Code file9.M1 Optional Stop – Stops program with M1 command10.Single Block – Run the G-Code line by line11.Block Delete – Ignores designated lines within the G-Code file12.Run From Here – Run the loaded G-Code file starting at selected line3.2.2Running a G-Code File ExampleTo run a G-Code file, follow the steps below:1.Press the [Load] button (Figure 6) then select a G-Code file and press [Open]2.Jog the machine to the work piece zero point3.Zero the axes by selecting [UnLocked] and then [Zero All] (Figure 7)4.Before running G-Code, it is good practice to go back to [Locked] mode. All offsets are saved when[Locked] is pressed.5.Press [Cycle Start] to run the program (Figure 6)6.If it is necessary to stop in the middle of a program to inspect the part press [Feed Hold] (Figure 6)7.If it is necessary to end a program before it has completely run press [Cycle Stop] (Figure 6)FIGURE 7 – ZERO THE AXESP a g e | 9 3.2.3Running a G-Code File with the Single Block OptionIf it is necessary to run a G-Code file line-by-line, follow the steps below:1.Click the [Single Block] button (Figure 6)2.Press [Cycle Start] button to begin the file (Figure 6)3.The line will run and then enter feed hold.4.To run successive lines, continue pressing [Cycle Start]5.When finished running lines, press [Single Block] to put it back in normal run mode3.2.4Block Delete OptionThe Block Delete option (Figure 6) allows for specially marked lines to be ignored when running a G-Code file. Consider the following:N1 M3 S2000N2 /G00 G91 Z-1N3 G00 G91 X4 Y5N4 /4 G01 G91 Z3N5 /M00N6 G01 G91 Z5N7 /8 M5N8 M30With the Block Delete options selected as noted in Figure 8, the N2, N5, and N7 lines would be ignored.FIGURE 8 – ZERO THE AXES3.2.5Running a G-Code File with the Run From Here OptionIf for whatever reason a program needs to be started in the middle, use the Run From Here feature by following these steps:e the Up/Down arrows in the G-Code file window to select the line to start from (Figure 6)2.Press the [Run From Here] button (Figure 6)3.Select the [Change to Needed Tool] button if applicable (Figure 9)4.Enter desired value in the Feed Rate field (Figure 9)5.Select axis to move and press [Move Selected] button (Figure 9) to move the axis into position6.Select desired Auxiliary Settings and press [Turn On Selected Auxiliaries] button (Figure 9)7.Press [Cycle Start] to begin the file at selected starting line (Figure 6)10 | P a g eFIGURE 9 – RUN FROM HERE3.2.6Tool Path ScreenBelow are the controls to manipulate the tool path screen:1.Zoom – right click with the mouse and move mouse up/down2.Rotate – left click with the mouse and rotate the part by moving the mouse3.Pan – press Ctrl on the keyboard and left click with the mouse, then pan by moving the mouse (one-hand control option is to use left and right mouse click and move the mouse. No Ctrl press needed) 3.3AdvancedThe Advanced tab has various settings and axis details for the G-Code file to be run as well as options for the tool path display.FIGURE 10 - ADVANCED CONTROLS3.3.1Dry RunThe Dry Run option will process the G-Code file without turning on Mist or Coolant.3.3.2M-S-T LockThe M-S-T Lock mode prevents the Mist, Spindle, and Tool Changes from activating when running a G-Code file (ignores M-, S-, and T-Codes).3.3.3Regen Tool PathClicking the [Regen Tool Path] button regenerates the Tool Path window display.3.3.4Show BoundariesClicking the [Show Boundaries] button displays a dotted line around the area of range of travel determined by values set in soft-limits.3.3.5Jog FollowJog Follow sets the tool path screen to keep the current position in the range of view4TOOLS, TOOL OFFSETS, AND CUTTER COMPENSATION4.1Tools and Tool OffsetsDefining tools depends on the tool setter/gage-block position type. The tool setter/gage-block position type options are fixed (e.g., a bed mill) and random (e.g., a knee mill).4.1.1Fixed Tool Set HeightIf the table height (work surface) of the machine is adjustable, the Setter Position needs to be updated before you begin a job.1.Change the tool number to the number for the new tool2.Put the new tool in the spindle3.Touch the tool off on the tool setter/gage block4.Go to the Tool Offset tab (Figure 11)5.Press the [Manual Calculate Tool Length] button to record tool length6.Repeat steps 1-6 for each additional toolsFIGURE 11 - TOOL WINDOW4.1.2Random Tool Set Height1.Put the master tool in the spindle2.Press [UnLock] to unlock the screen3.Set the tool number to 1 (Figure 2 #5)4.Verify the gage block height setting5.Touch the master tool off on the tool setter/gage block6.Press the [Calculate Setter Position] button7.Remove master tool and place the new tool in the spindle8.Change the tool number to the number for the new tool9.Touch the master tool off on the tool setter/gage block10.Press the [Manual Calculate Tool Length] button to record tool length11.Repeat steps 7-10 for each additional toolsFIGURE 12 RANDOM TOOL SET HEIGHTNote: The master tool does not have to be an actual tool. It can be a blank rod or the bottom of the empty spindle. The main point is that it should be a specific and consistent reference point.4.1.2.1SETTING UP ADDITIONAL TOOLS AFTER CALCULATING SETTER POSITION:1.Define the master tool as stated above2.Change the tool number to the number for the new tool3.Put the new tool in the spindle4.Touch the tool of on the same surface as the master tool5.Go to the Tool Offset tab (Figure 11)6.Press the [Manual Calculate Tool Length] button7.Repeat steps 2-6 for each additional toolTool diameters can be set in the Diameter field (Figure 2 #5) or in the Tool Table (Figure 13). Tool diameters are required only if cutter compensation is being used.4.1.3Auto Tool SetterWith an auto tool setter, the process is the same, however, instead of manually touch the tool of on the gage block/setter, press [Auto Calculate Tool Length].FIGURE 13 - TOOL TABLE5SPINDLE CONTROL5.1G-Code Spindle ControlThe spindle is controlled through G-Code using the M-Codes M3 (Clockwise), M4 (Counterclockwise), and M5 (Off). To control the spindle speed in RPMs an S word is added.For example, M3 S2000 would turn the spindle on in the clockwise direction at 2000 RPM.5.2Manual Spindle Control5.2.1SpindleTo control the spindle separately from G-Code use the spindle control on the Machine screen.FIGURE 14 - SPINDLE CONTROL1.S-OV% – Spindle Override Percentage2.Load – The load of the spindle3.Spindle FWD – Turns spindle on clockwise4.Spindle REV – Turns spindle on counterclockwise5.TSpeed – True Spindle speed (if feedback encoder is installed)6.Speed – Commanded Speed7.Range – Pulley number selected and speed range5.2.2Mist[Mist] turns on and off the Mist control (Figure 14).5.2.3Coolant[Coolant] turns on and off the Coolant control (Figure 14).6FIXTURE OFFSETSAll G-Code files have their own coordinate system. In order to allow parts to be located on the table at any desired location, the part offset can be defined to adjust the actual location of the part on the table.Part offsets can be defined and saved using G54-G59P120. The functionality is designed to allow different tooling setups to have predefined zero points to allow for streamlined setup.Setting up saved part offsets is done through the Fixture Offsets tab. You can view the fixture table and change the values directly by clicking the [Show fixture Table] button. The values can also be set by using the MDI command to select the G-Code number for the fixture offsets to be stored in. Once the machine is at the desired zero position, and the edge finder diameter has been set, the edge finder offset buttons can be used to set the values. Use the [Calculate Z Fixture Offset] button for setting the Z offset.FIGURE 15 – FIXTURE OFFSETS7 APPENDIX A – STARTUP PROCEDUREEnableFigure 168APPENDIX B8.1Warranty InformationMachMotion guarantees all products to be free from manufacturer defects for a period of one year from the date of purchase. Products which prove to be defective under normal conditions and proper use, during the warranty period, will be repaired or exchanged free of charge. For warranty service the customer must contact MachMotion for an RMA number and then return the defective product to MachMotion. If a product is sent to MachMotion without an RMA number, the product may be misdirected or delayed. When a product or part is exchanged, any replacement item becomes the customer’s property and the replaced item becomes MachMotion's property.If the defect is found to be caused by improper use or installation, the warranty is void. Otherwise the product will be repaired or exchanged and returned to the address located on the Product Return/Repair Form. MachMotion will cover ground shipping cost for the replacement/repaired product being returned to the customer. MachMotion does offer expedited shipping at the customer’s expense.If a replacement product is needed quickly, a replacement can be sent immediately. In this case the customer will be charged for the replacement part at the time of the order and be refunded that charge when the defective component is returned to MachMotion, assuming the defective item falls under the warranty guidelines. MachMotion will issue a refund within two work weeks after receiving the faulty component.8.2Additional ResourcesAdditional manuals and resources can be found at The Mach Motion Team14518 County Road 7240, Newburg, MO 65550(573) 368-7399 • Fax (573) 341-2672。
RMX1000MCU操作手册
RMX1000和RMX500 MCU操作手册RMX1000或RMX500 MCU操作可分为设备登录、会议创建、会议操作三部分。
一、设备登录1)请将在二楼网络控制中心的RMX1000、RMX500视频设备开机。
(2楼机房内已配置好的RMX1000和RMX500设备24小时开机,无须再进行开关机等任何操作;除意外情况外,RMX1000和RMX500须进行重新启动或开关机等操作)2)RMX1000和RMX500 2台MCU互为备份,其中RMX1000为主用MCU、RMX500为备用MCU。
正常召开会议情况下,启用主用MCU RMX1000;当主用MCU RMX1000设备出现故障时,启用备用MCU RMX500,确保会议的正常召开和进行。
3)在IE浏览器中输入RMX1000(IP地址:11。
20.14.168)或RMX500(IP地址:11.20。
14。
178)的IP地址,然后点击电脑键盘的“Enter 回车"按钮即可察看到下图。
RMX1000 登录界面RMX500登录界面4)在RMX1000或RMX500 MCU的对话框中输入用户名和密码,用户名、密码均为POL YCOM,点击“登录"按钮即可成功登录MCU设备。
如下图二、会议创建1、会议模版的创建1)在RMX1000或RMX500 MCU设备中点击RMX管理选项中的“会议模版”按钮,即可进入会议模版菜单。
如下图:2)点击会议模版菜单中的“新建会议模版”按钮,即进入会议模版创建的选项.如下图:点击“新建会议模版"按钮后,会弹出如下对话框.会议模版对话框3)会议模版依据会议召开的模式可分为三种。
模式1:总行-—--沈阳分行(带大连中支);模式2:总行--——沈阳分行-————地市中支;模式3:沈阳分行—-—-地市中支。
4)模式1:总行—-—沈阳分行(带大连中心支行)会议模版的创建过程:A.在对话框中输入名称-——--例如:总行级联会议(带大连中支);B.在对话框中选择连接速率—--例如:1024Kbps(沈阳分行会议模版连接速率须与总行会议模版连接速率一致);C.在对话框中将“启用从级联策略"选中;D.在对话框中将“最小预留资源数”和“最大可用资源数"均选中;E.如需启用会场断线重邀功能,需要在对话框中将“自动重邀”选中。
AIMI说明书

目 录一、概述 (1)二、主要技术参数 (2)三、型号规格 (3)四、执行机构外形及安装尺寸 (7)五、执行机构的接线 (15)六、开箱和产品的陈套性 (20)七、运输和贮存 (20)八、质量承诺 (20)一、概述AI、MI系列智能型电动执行机构是在引进产品ROTORK A、M系列电动执行机构的基础上,采用当今最先进的超大规模数字集成电路研制而成的新一代智能化、数字化、中/英文菜单显示、遥控操作的电动执行机构。
使用红外线遥控器可安全、快捷地对执行机构力矩值、限位以及其它所有控制、指示和保护功能进行设定。
本产品执行的标准代号及名称:Q/YXBM 233 -2004《ID系列智能型电动执行机构》。
1、AI、MI智能型电动执行机构的主要特点:经典的机械力矩传感器,性能稳定、工作可靠脉冲数字化的霍尔效应位移传感器精度等级高,适应性强采用超大规模的集成芯片,使执行机构具备了强大的功能提供中文、英文切换菜单。
菜单式操作,凸现了调试简单、操作方便的优点非侵入式设计——采用双密封结构、无贯通轴设计,无需打开电气端盖即可通过遥控器进行设定和调试,是防护等级IP68的绝对保证2、AI、MI智能型电动执行机构的功能:遥控器设定功能执行机构阀位指示显示功能行程限位保护功能力矩限位保护功能状态指示触点功能1)中途限位 4)执行器正在运行 7)远程控制 10)手轮操作中 13)行程中力矩跳断 2)执行器正在打开 5)就地停止 8)开阀联锁 11)开阀力矩跳断3)执行器正在关闭 6)就地控制 9)关阀联锁 12)关阀力矩跳断阀门报警功能控制系统报警指示1)过力矩报警功能 2)堵转报警功能 a 、关方向过力矩 a 、关方向堵转 b 、开方向过力矩 b 、开方向堵转 c 、全方向过力矩 c 、全方向堵转1)紧急事件(ESD)报警 2)断信号报警执行机构报警指示1)电机过热报警 3)内电源故障报警 5)内部系统故障报警 7)就地接线故障报警 2)电池电量过低报警 4)电源缺相报警 6)阀位信号掉失保护 瞬间反向保护功能就地控制电动/自保持选择功能触点方式选择功能外部联锁设置功能条件控制设置功能两线控制设置功能力矩旁路设置功能ESD超越保护功能中断设置功能附加指示触点功能3、AI、MI智能型电动执行机构的工作原理:AI、MI系列多转式智能型电动执行机构由三相异步电动机驱动,通过蜗轮蜗杆减速,带动空心输出轴转动输出转矩。
NICE1000电梯一体化控制器用户手册-V1.10
目录第一章安全信息及注意事项.................... - 1 -1.1安全事项 (1)1.2注意事项 (2)第二章产品信息........................................ - 4 -2.1命名规则及铭牌 (4)2.2NICE1000系列型号 (4)2.3技术规范 (5)2.4产品外观 (6)2.5控制器的保养与维护 (7)第三章安装与配线.................................... - 9 -3.1系统配置简介 (9)3.2机械安装 (10)3.3电气安装及接线 (10)第四章调试工具使用说明 ..................... - 19 -4.1NICE1000调试工具 (19)4.2操作面板使用说明 (19)第五章功能参数表.................................. - 23 -5.1功能参数表说明 (23)5.2功能参数表 (23)第六章功能参数说明 ............................. - 37 -6.1F0组基本参数 (37)6.2F1组电机参数 (38)6.3F2组矢量控制参数 (41)6.4F3组运行控制参数 (42)6.5F4组楼层参数 (45)6.6F5组端子输入功能参数 (46)6.7F6组电梯基本参数 (53)6.8F7组端子输出功能参数 (55)6.9F8组增强功能参数 (55)6.10F9组时间参数 (57)6.11FA组键盘设定参数 (58)6.12FB组门功能参数 (61)6.13FC组保护功能设置参数 (63)6.14FD组保留参数 (65)6.15FE组电梯功能设置参数 (65)6.16FF组厂家参数(保留) (68)6.17FP组用户参数 (68)第七章系统典型应用及调试 .................. - 69 -7.1电梯调试 (69)7.2系统典型应用 (70)第八章故障诊断及对策 ......................... - 77 -8.1故障类别说明 (77)8.2故障信息及对策 (77)-前言NICE1000是默纳克控制技术有限公司自主研发的电梯一体化控制器。
IMS-1000安装
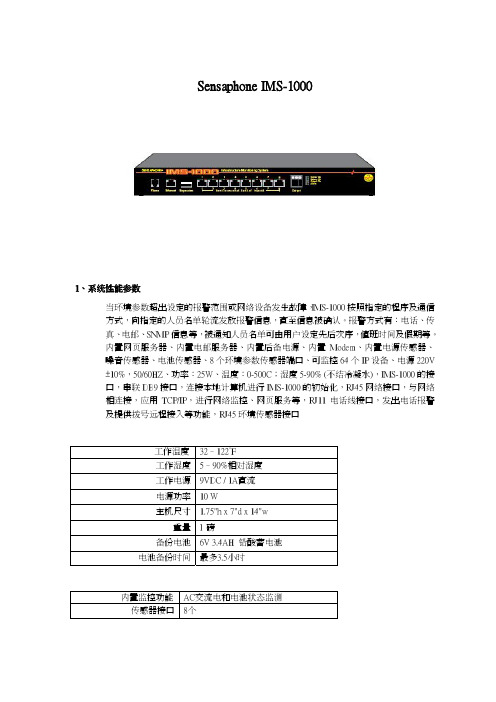
Sensaphone IMS-10001、系统性能参数当环境参数超出设定的报警范围或网络设备发生故障,IMS-1000按照指定的程序及通信方式,向指定的人员名单轮流发放报警信息,直至信息被确认。
报警方式有:电话、传真、电邮、SNMP信息等,被通知人员名单可由用户设定先后次序,值班时间及假期等。
内置网页服务器、内置电邮服务器、内置后备电源、内置Modem、内置电源传感器、噪音传感器、电池传感器、8个环境参数传感器端口、可监控64个IP设备、电源220V ±10%,50/60HZ、功率:25W、温度:0-500C;湿度5-90% (不结冷凝水),IMS-1000的接口,串联DB9接口,连接本地计算机进行IMS-1000的初始化,RJ45网络接口,与网络相连接,应用TCP/IP,进行网络监控、网页服务等,RJ11电话线接口,发出电话报警及提供拨号远程接入等功能,RJ45环境传感器接口工作温度 32–122°F工作湿度 5–90%相对湿度工作电源 9VDC / 1A直流电源功率 10 W主机尺寸 1.75"h x 7"d x 14"w重量 l 磅备份电池 6V 3.4AH 铅酸蓄电池电池备份时间 最多3.5小时内置监控功能 AC交流电和电池状态监测传感器接口 8个传感器类型 温度、湿度、漏水、电源、红外探头、烟感、干接点信号传感器接口型式 RJ-45插口连接线 CAT-5, 568B网络线连接线最大长度 300米一、系统结构示意图二、系统主要功能设置1、系统登录在WEB网页浏览地址栏输入IM1000主机的IP地址(该地址由网络管理员分配),即进入主机登录介面,输入用户名及密码(管理员为admin 密码ims1k)进入监控页面。
2、设置用户及联系人在设置菜单中的User profiles设置添加用户及登录权限,每个用户下面允许设置四个报警联系人,当系统发生告警,将通过设置的报警方式通知联系人。
中SLM-1000_Manual

(2) 超声波换能器规格
XDS超声波换能器使用压电陶瓷圆盘,利用电压和声波的相互转换原理,进行非接触式液位测
量。使用 IS科技株式会社特有的声波集中放射面方式的技术进行设计制作。所谓声波集中放射 面方式是指,让超声波的放射面凹下去,在周围设置声波槽,使超声波的能量向中心集中,从 而尽可能让周围障碍物所造成的影响最小化,使其能够对远距离探测物体进行测量的一种方式。 在结构上,具有放射面上的水滴能够流向外部达到防止露水的特点,和外部的雨水不能流进放 射面中心部分的特点。 换能器的内部是由压电陶瓷圆盘和阻抗匹配层及接受器等构成的,环氧树脂复合型材制成的放 射面在最前面,温度传感器设置在内部,可以根据温度变化进行音速补偿和标示测量的温度值, 外部由聚丙烯制成,从而使内部环境十分稳定。
分辨率 最大追踪速度
显示屏 工作温度
外形 材质 重量 保护等级 规格认证
SLM-1000
8m 型
12m 型
15m 型
100 – 230V~ , 50/60Hz (DC Version - Option)
15VA 以下
0.30 ∼ 8.50m
0.50 ∼ 12.50m
0.50 ∼ 15.50m
4 ∼ 20 / 20 ~ 4mA, 独立的
10
(1) 超声波换能器的安装环境 SONDAR XDS系列超声波换能器可以利用传感器上端的螺丝,通过符合规格的PVC材质的插槽 来固定,或是直接用法兰来固定。 一般来说超声波液位计根据超声波的前进角度的变化来决定测量的范围,SONDAR SLM 系列 具有可调节换能器发射波功率的功能,可以满足特殊环境下的使用,从而使适用范围大幅增加。
9
超声波换能器的安装 超声波换能器的感应范围是根据换能器中产生的超声 波的强度来决定的,这个和换能器的指向性有着密不可 分的关系。 正常情况下超声波换能器中产生的声波强度在中心是 最大的,并且具有角度越偏强度越小的特征,一般选定 的感应区域应以换能器中心轴为准心,到基点为止,当 减少-3dB的角度时,大约是 8°。 安装超声波换能器时,如右图所示,在超声波的方向角 范围内要确保没有阻挡超声波传播的障碍物。本公司的 超声波传感器需要法兰、传感器适配器、端头、金属管 道等配件,才能安装成功。这些配件单独销售。具体详 情请向本公司咨询。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a) 百分比上限:设定百分比最大值(0~100) b) 百分比下限:设定百分比最小值(0~100)
计算方法:
计算检查窗口内部符合亮度和颜色设定范围内的像素组成的最大连通区域的最小外接 矩形。并计算该外接矩形面积与检查窗口面积的百分比。百分比的结果符合判定参数范围时, 判定结果为 OK。反之,判定结果为 NG。
Range
计算参数: a) X 邻域:设定 X 方向做均值运算的像素个数 b) Y 邻域:设定 Y 方向做均值运算的像素个数 判定参数: a) 上限:亮度最大值(0~255) b) 下限:亮度最小值(0~255) 计算方法: 先 X 邻域和 Y 邻域做均值运算后,再计算检查窗口内部像素亮度最大值。结果符合判 定参数的范围时,判定结果为 OK。反之,判定结果为 NG。
易用性
机器采用 Microsoft Windows XP 操作系统。强劲的功能,满足用户全面的需求。
高精度高速度
机器采用 2M 像素工业相机,在 20u 时 FOV 区域大小为:32mm X 24mm。机器可以 在 1sec 内完成对 4/5FOV 的拍摄和检测。通过对相机的调整,可以将最高分辨率升至 10um。
Mean
计算参数: 无 判定参数: a) 上限:亮度最大值(0~255) b) 下限:亮度最小值(0~255) 计算方法: 计算检查窗口内部像素亮度的平均值。结果符合判定参数的范围时,判定结果为 OK。 反之,判定结果为 NG。
Max
计算参数: a) X 邻域:设定 X 方向做均值运算的像素个数 b) Y 邻域:设定 Y 方向做均值运算的像素个数 判定参数: a) 上限:亮度最大值(0~255) b) 下限:亮度最小值(0~255) 计算方法: 先 X 邻域和 Y 邻域做均值运算后,再计算检查窗口内部像素亮度最大值。结果符合判 定参数的范围时,判定结果为 OK。反之,判定结果为 NG。
JUTZE XIAMI-1000 自动光学检查仪使用手册
Ver.:1.0
关于本手册
感谢您购买 XIAMI-1000 自动光学检查仪
本手册阐述如何正确使用这个机器, 在使用机器之前请 仔细阅读本手册。
本手册内容在未经允许下, 不可复制传播。
本手册内容更新时, 可不必通知用户。
虽然经过严格核对, 本手册可能仍然存在纰漏。如有此情形, 请联络机器供应商。
位移输出:
输出向量:同时包含 X/Y 方向的偏移量
ContoursFind
计算参数:
亮度参数(可用鼠标通过直方图来设定): a) 亮度上限:设定最高亮度值(0~255) b) 亮度下限:设定最低亮度值(0~255) 颜色参数(可用鼠标通过色彩图来设定): c) 红色上限:设定红色最大值(0~173) d) 红色下限:设定红色最小值(0~173) e) 绿色上限:设定绿色最大值(0~173) f) 绿色下限:设定绿色最小值(0~173) g) 蓝色上限:设定蓝色最大值(0~173) h) 蓝色下限:设定蓝色最小值(0~173) 目标尺寸: i) X:设定搜寻的目标尺寸 X 方向大小,单位为 um j) Y:设定搜寻的目标尺寸 Y 方向大小,单位为 um k) 容许差异%:实际搜寻的目标与设定目标之间容许差异百分比 块参数: l) 数量:设定组成目标的联通区域数量(0,1,2,3,4,) m) 一致性:连通区域几何尺寸的大小接近程度(0,1,2,3,4)
RectSearch
计算参数:
亮度参数(可用鼠标通过直方图来设定): a) 亮度上限:设定最高亮度值(0~255) b) 亮度下限:设定最低亮度值(0~255) 颜色参数(可用鼠标通过色彩图来设定): c) 红色上限:设定红色最大值(0~173) d) 红色下限:设定红色最小值(0~173) e) 绿色上限:设定绿色最大值(0~173) f) 绿色下限:设定绿色最小值(0~173) g) 蓝色上限:设定蓝色最大值(0~173) h) 蓝色下限:设定蓝色最小值(0~173)
搬出基板
4) 选择菜单,执行“搬出基板至进口/出口”命令
采集基板全图
1) 搬入基板 2) 设定正确的基板尺寸 3) 选择菜单,执行“分配基板视区”命令 4) 选择菜单,执行“归零”命令 5) 选择菜单,执行“采集基板全图”命令
算法参数说明
Scale
计算参数: a) 亮度上限:设定最高亮度值(0~173) b) 亮度下限:设定最低亮度值(0~173) c) 红色上限:设定红色最大值(0~173) d) 红色下限:设定红色最小值(0~173) e) 绿色上限:设定绿色最大值(0~173) f) 绿色下限:设定绿色最小值(0~173) g) 蓝色上限:设定蓝色最大值(0~173) h) 蓝色下限:设定蓝色最小值(0~173) 判定参数: a) 百分比上限:设定百分比最大值(0~100) b) 百分比下限:设定百分比最小值(0~100) 计算方法: 计算检查窗口内部符合亮度和颜色设定范围内的像素的百分比。百分比的结果符合判定 参数范围时,判定结果为 OK。反之,判定结果为 NG。
a) 百分比上限:设定百分比最大值(0~100) b) 百分比下限:设定百分比最小值(0~100) 计算方法:
计算检查窗口内部符合亮度和颜色设定范围内的像素组成的尺寸大小最符合目标尺寸 的连通区域的最小外接矩形。并计算该外接矩形与目标尺寸的差异,完全符合时为 100%。 该差异值符合判定参数范围时,判定结果为 OK。反之,判定结果为 NG。
MarkSearch
计算参数:
亮度参数(可用鼠标通过直方图来设定): a) 亮度上限:设定最高亮度值(0~255) b) 亮度下限:设定最低亮度值(0~255) 颜色参数(可用鼠标通过色彩图来设定): c) 红色上限:设定红色最大值(0~173) d) 红色下限:设定红色最小值(0~173) e) 绿色上限:设定绿色最大值(0~173) f) 绿色下限:设定绿色最小值(0~173) g) 蓝色上限:设定蓝色最大值(0~173) h) 蓝色下限:设定蓝色最小值(0~173) 判定参数:
检查参数:
带宽百分比:设定检查窗口内部符合亮度和颜色的带宽占窗口长(宽)百分比
判定参数:
i) 位移上限:以检查窗口中心为原点,带宽最大位移值(um) j) 位移下限:以检查窗口中心为原点,带宽最小位移值(um) 检查结果:结果符合上限和下限之间,判定结果为 OK。反之,判定结果为 NG。
位移输出:
输出向量:一个窗口只包含 X/Y 方向其中一个偏移量
高检出率
通过对彩色图像的分析处理,加以本公司独有的检测算法。机器可以保证较高的捡出率 和直通率。
机器指标
图像系统: 2M 像素彩色 CCD 工业相机 分辨率(标准): 10um/Pixel – 20um/Pixel 检测元件: 01005Chip 元件、0.3Pitch 引脚元件(SOP、QFP、Connector)、其他异形
安全须知
红色紧急停开关位于机器右前方面板。有任何安全问题发生时,请你快速拍下该开关。 在启动设备后,请留意机器安全状况。特别要注意机器移动部件对人体会造成伤害地可
能。 在机器通电状态下,不要触摸机器内部。有可能会遭到电击的危险。 不要在机器内部放置其他物体,而影响机器散热性能。有可能会造成火灾隐患。 不要在机器顶部放置其他物体。有可能在机器工作时,震动坠落而造成伤害。 避免机器遭受液体泼溅,如水等。有可能造成机器损坏,甚至火灾。 机器发生异常时,请立即终止运行并切断电源。如闻到空气烧焦味时。 请不要改装机器,这将带来安全隐患或造成机器故障。 只有经过培训人员才能操作机器。 请勿使 interlock key 失效,来操作机器。
判定参数:
n) 百分比上限:设定百分比最大值(0~100) o) 百分比下限:设定百分比最小值(0~100)
位移输出:
输出向量:同时包含 X/Y 方向的偏移量
计算方法:
计算检查窗口内部符合亮度和颜色设定范围内的像素组成的尺寸大小最符合目标尺寸 的连通区域的最小外接矩形。并计算该外接矩形与目标尺寸的差异,完全符合时为 100%。 该差异值符合判定参数范围时,判定结果为 OK。反之,判定结果为 NG。
LBandSearch / WBandSearch
计算参数:
亮度参数(可用鼠标通过直方图来设定): a) 亮度上限:设定最高亮度值(0~255) b) 亮度下限:设定最低亮度值(0~255) 颜色参数(可用鼠标通过色彩图来设定): c) 红色上限:设定红色最大值(0~173) d) 红色下限:设定红色最小值(0~173) e) 绿色上限:设定绿色最大值(0~173) f) 绿色下限:设定绿色最小值(0~173) g) 蓝色上限:设定蓝色最大值(0~173) h) 蓝色下限:设定蓝色最小值(0~173)
机器放置场所环境要求
电力
1K AV
气压
0.5MPa
环境温度
5 ~ 40 ℃
相对湿度
25% ~ 80%
避免机器在以下场所工作
阳光直射处。 地面有严重震动区域,地面水平不佳。 空气流通不畅。
关于软件
任何对本软件拷贝、修改,或公开透露本系统所包含的信息,都是不允许的。
机器介绍
XIAMI-1000 是一台基板外观缺陷高速检查仪。机 器通过使用 CCD 成像技术,结合 LED 照明系统对组 装基板进行检测。能够判断元件的缺失、反向、翻转、 偏移、焊锡不良等缺陷。
元件 检测项目: 缺件、极性反向、位置偏移、焊锡不良、引脚短路、、、、、、等 基板尺寸: 50mm X 50mm ~ 330mm X 250mm 基板厚度: 0.3mm ~ 6mm 基板上下方高度: 上方 30mm 下方 60mm 基板上下方高度: 上方 30mm 下方 60mm 基板流向: 左至右 或 右至左 (可选)
判定参数:
a) 上限:检查窗口内文字个数的最多值 b) 下限:检查窗口内文字个数的最少值 c) 辨识结果:检查窗口内符合亮度和颜色 识别出的文字 d) 标准字符:参考文字 检查结果:结果符合上限和下限之间,判定结果为 OK。反之,判定结果为 NG