2014西邮电赛题目 四旋翼自主飞行器设计(C题)
电子设计大赛四旋翼设计报告最终版
电子设计大赛四旋翼设计报告最终版四旋翼飞行器(A 题)参赛队号:20140057号四旋翼飞行器设计摘要:四旋翼作为一种具有结构特殊的旋转翼无人飞行器,与固定翼无人机相比,它具有体积小,垂直起降,具有很强的机动性,负载能力强,能快速、灵活的在各个方向进行机动,结构简单,易于控制,且能执行各种特殊、危险任务等特点。
因此在军用和民用领域具有广泛的应用前景如低空侦察、灾害现场监视与救援等。
多旋翼无人机飞行原理上比较简单,但涉及的科技领域比较广,从机体的优化设计、传感器算法、软件及控制系统的设计都需要高科技的支持。
四旋翼无人机的飞行控制技术是无人机研究的重点之一。
它使用直接力矩,实现六自由度(位置与姿态)控制,具有多变量、非线性、强耦合和干扰敏感的特性。
此外,由于飞行过程中,微型飞行器同时受到多种物理效应的作用,还很容易受到气流等外部环境的干扰,模型准确性和传感器精度也将对控制器性能产生影响,这些都使得飞行控制系统的设计变得非常困难。
因此,研究既能精确控制飞行姿态,又具有较强抗干扰和环境自适应能力的姿态控制器是微小型四旋翼飞行器飞行控制系统研究的当务之急。
2.1.1 方案一:选择Coldfire系列芯片作为系统控制的主控板,因为在以往队员们做过飞思卡尔智能车竞赛,对此系列的芯片做的比较熟悉,芯片功能强大,但以往做的核心板较大,所需的电路较多,考虑到四轴飞行器的轻便,故而不太是一个很理想的选择。
2.1.2 方案二:主控板使用STM32。
STM32板子的I/O口很多,自带定时器和多路PWM,可以实现的功能较多,符合实验要求。
Stm32迷你板在体积和重量上也不是很大,对飞机的载重量要求不是很高。
综上所述,我们一致决定使用STM32 MMC10作为此次大学生电子竞赛的主控板。
2.2 飞行姿态的方案论证:2.2.1 方案一:十字飞行方式。
四轴的四个电机以十字的方式排列,x轴和y轴成直角,调整俯仰角和翻滚角的时候分开调整,角度融合简单,适合初学者,能明确头尾,飞行时机体动作精准,飞控起来也容易。
电子设计大赛四旋翼设计报告最终版

四旋翼飞行器〔A 题〕参赛队号:20140057号四旋翼飞行器设计摘要:四旋翼作为一种具有构造特殊的旋转翼无人飞行器,与固定翼无人机相比,它具有体积小,垂直起降,具有很强的机动性,负载能力强,能快速、灵活的在各个方向进展机动,构造简单,易于控制,且能执行各种特殊、危险任务等特点。
因此在军用和民用领域具有广泛的应用前景如低空侦察、灾害现场监视与救援等。
多旋翼无人机飞行原理上比拟简单,但涉及的科技领域比拟广,从机体的优化设计、传感器算法、软件及控制系统的设计都需要高科技的支持。
四旋翼无人机的飞行控制技术是无人机研究的重点之一。
它使用直接力矩,实现六自由度〔位置与姿态〕控制,具有多变量、非线性、强耦合和干扰敏感的特性。
此外,由于飞行过程中,微型飞行器同时受到多种物理效应的作用,还很容易受到气流等外部环境的干扰,模型准确性和传感器精度也将对控制器性能产生影响,这些都使得飞行控制系统的设计变得非常困难。
因此,研究既能准确控制飞行姿态,又具有较强抗干扰和环境自适应能力的姿态控制器是微小型四旋翼飞行器飞行控制系统研究的当务之急。
一、引言:1.1 题目理解:四旋翼飞行器,顾名思义,其四只旋转的翅膀为飞行的动力来源。
四只旋转翼是无刷电机,因此对于无刷电机的控制调速系统对飞行器的飞行性能起着决定性的作用。
在本次大赛中,需要利用四旋翼飞行器平台,实现四旋翼的起飞,悬停,姿态控制,以及四旋翼和地面之间的测距等功能。
以往做的核心板较大,所需的电路较多,考虑到四轴飞行器的轻便,故而不太是一个很理想的选择。
方案二:主控板使用STM32。
STM32板子的I/O口很多,自带定时器和多路PWM,可以实现的功能较多,符合实验要求。
Stm32迷你板在体积和重量上也不是很大,对飞机的载重量要求不是很高。
综上所述,我们一致决定使用STM32 MMC10作为此次大学生电子竞赛的主控板。
2.2 飞行姿态的方案论证:方案一:十字飞行方式。
四轴的四个电机以十字的方式排列,*轴和y轴成直角,调整俯仰角和翻滚角的时候分开调整,角度融合简单,适合初学者,能明确头尾,飞行时机体动作精准,飞控起来也容易。
电赛四旋翼飞行器
2014年电子设计竞赛四旋翼自主飞行器(G题)2013年9月11日目录摘要关键词 (1)一系统方案 (2)1.1控制系统的选择 (2)1.2飞行姿态控制的论证与选择 (2)1.3电机的选择 (2)1.4高度测量模块的论证与选择 (2)1.5电机调速模块的选择 (2)1.6循迹模块的方案选择 (2)1.7薄铁片拾取的方案的论证与选择 (2)1.8角速度与角加速度测量模块选择 (3)二设计与论证 (3)2.1控制方法设计 (3)2.1.1降落及飞行轨迹控制设计 (3)2.1.2飞行高度控制设计 (4)2.1.3飞行姿态控制设计 (4)2.1.4铁片拾取与投放控制设计 (4)2.2参数计算 (5)三理论分析与计算 (5)3.1Pid控制算法分析..............................................................................................5.3.2飞行姿态控制单元 (6)四电路与程序设计 (7)4.1系统组成 (7)4.2 原理框图 (7)4.3电路图 (8)4.4系统软件与流程图 (9)五测试方案与测试条件 (11)5.1测试方案 (11)5.2测试条件 (11)六结论 (11)附录 (12)附一:元器件明细表 (12)附二:仪器设备清单 (12)附三:源程序 (12)摘要:本系统由数据采集、数据信号处理和飞行姿态和航向控制部分组成。
系统选用STC89C52单片机作为主控芯片,对从MPU-6050芯片读取到的一系列数据进行PID算法处理并给飞行器的电调给出相应指令从而达到对飞行器的飞行姿态的控制。
采用MPU-6050芯片采集四旋翼飞行器的三轴角速度和三轴角加速度数据。
用红外传感器来检测出黑色指示线,以保证飞行器不脱离指定飞行区域及达到指定圆形区域。
利用超声波传感器来检测飞行器与地面的距离,以保证飞行器能越过一米示高线。
电子设计大赛国赛_四旋翼自主飞行器A题
2013年全国大学生电子设计竞赛课题:四旋翼自主飞行器(B 题)【本科组】2013年9月7日摘要为了满足四旋翼飞行器的设计要求,设计了以微控制器为核心的控制系统和算法。
首先进行了各单元电路方案的比较论证,确定了硬件设计方案。
四旋翼飞行器采用了固连在刚性十字架交叉结构上的4个电机驱动的一种飞行器,以78K0R CPU內核为基础,围绕新的RL78 CPU內核演化而来的RL78/G13作为控制核心,工作频率高达32MHz,工作电压1.6V-5.5V,适合各种类型的消费类电子和工业应用, 满足8/16位微控制器的需求,有助于降低系统功耗,削减总系统的构建成本。
采用9926B MOS管芯片的驱动直流电机,该驱动芯片具有内阻小、负载电流大、且控制简单的特性。
通过采用MPU-6050整合的3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,实现了四旋翼飞行器运动速度和转向的精准控制。
通过HC-SR04超声波测距模块实现了对四旋翼飞行器飞行高度的准确控制。
通过激光传感器,实现了四旋翼飞行器沿黑线前进,在规定区域起降,投放铁片等功能,所采用的设计方案先进有效,完全达到了设计要求。
关键词:四旋翼自主飞行器,E18-D50NK光电传感器,寻线,超声波,单片机。
四旋翼自主飞行器(B 题)【本科组】1系统方案本系统主要由电源模块、电机驱动模块、光电循迹模块模块、超声波测高模块、姿态传感器模块组成,下面分别论证这几个模块的选择。
1.1 电源模块的论证与选择方案一:采用线性元器件LM7805三端稳压器构成稳压电路,为单片机等其他模块供电,输出纹波小,效率低,容易发热。
电赛四轴论文
电赛四轴论文 SANY GROUP system office room 【SANYUA16H-2015年全国大学生电子设计竞赛多旋翼自主飞行器(C题)2015年8月15日摘要四旋翼飞行器结构较简单,且能够控制其稳定飞行。
通过对MPU6050陀螺仪姿态索取,并以R5F100LEA单片机作为主控芯片,利用其内部资源,进行运算完成四元数矩阵转换及姿态解算、融和、矫正。
针对四旋翼飞行器的动力来源为直流电机,通过采用PWM控制方式对电机进行调速,通过调节电机转速,实现升力变化,控制飞行器的姿态及位置变化。
采用ov7620摄像头循迹使飞行器从A区到B区。
通过对四旋翼工作模式与控制参数的研究,采用PID算法,编程实现,模拟相应的飞行姿态,使四旋翼飞行器能够实现自主飞行、自主悬停控制,并且能够完成题目要求内容。
关键词:四旋翼飞行器;PWM;PIDAbstractFourrotatingpropeller-drivenaircraftstructureisrelativelysimple.ThroughtotheMPU6050gyrosc opetoreadgestures.AndR5F100LEAsingle-chipmicrocomputerasmaincontrolchip,Operationswithitsinternalresou rces,completethequaternionmatrixtransformationandattitudealgorithm ,harmony,andcorrect.Inviewofthefourrotoraircraftpowersourcefordcmot or,throughtheadoptionofPWMcontrolmethodformotorspeedadjustment, foradjustingthemotorspeed,implementchangestolift,andcontrolaircraft attitudeandpositionchanges.Weuseov7620cameratrackingmakeaircraft fromareaAtoareaB.Throughthestudyoffourrotorworkingmodeandthecon trolparametersofthePIDalgorithm,andprogrammingimplementation,sim ulationofthecorrespondingflightattitude,makefourrotoraircraftcanrealizeautonomousflight,hoveringcontrolindependentlyandcompletethesubje ctrequirements.keywords:Fourrotatingpropeller-drivenaircraft;PWM;PID目录1.系统方案论证与选择 (1)1.1姿态检测模块 (1)1.2电源模块 (2)1.3光电传感器模块 (2)2.系统理论分析与计算 (3)2.1姿态控制方法 (3)2.2电机驱动模块 (5)3.系统硬件电路设计与分析 (5)3.1电机驱动 (6)3.2姿态检测模块 (6)3.3MCU主控电路 (6)4.系统软件设计 (7)4.1中值窗口滤波算法 (8)4.2PID算法 (8)5.仿真测试与实飞 (9)5.1仿真测试 (9)5.2作品实物图 (10)5.3实飞测试 (11)6.结论 (12)参考文献 (I)多旋翼自主飞行器(C题)1.系统方案论证与选择随着传感器技术和控制理论的不断发展,尤其是微电子和微机械技术的逐步成熟使四轴飞行器的自主飞行控制变得易实现并成为国际上的热点研究对象。
201X电子设计大赛四旋翼自主飞行器_(B_题)
2013年全国大学生电子设计竞赛论文【本科组】课题:四旋翼自主飞行器(B 题)摘要为了满足四旋翼飞行器的设计要求,设计了以微控制器为核心的控制系统和算法。
首先进行了各单元电路方案的比较论证,确定了硬件设计方案。
四旋翼飞行器采用了固连在刚性十字架交叉结构上的4个电机驱动的一种飞行器,以78K0R CPU內核为基础,围绕新的RL78 CPU內核演化而来的RL78/G13作为控制核心,工作频率高达32MHz,工作电压1.6V-5.5V,适合各种类型的消费类电子和工业应用, 满足8/16位微控制器的需求,有助于降低系统功耗,削减总系统的构建成本。
采用9926B MOS管芯片的驱动直流电机,该驱动芯片具有内阻小、负载电流大、且控制简单的特性。
通过采用MPU-6050整合的3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense 的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,实现了四旋翼飞行器运动速度和转向的精准控制。
通过HC-SR04超声波测距模块实现了对四旋翼飞行器飞行高度的准确控制。
通过激光传感器,实现了四旋翼飞行器沿黑线前进,在规定区域起降,投放铁片等功能,所采用的设计方案先进有效,完全达到了设计要求。
关键词:四旋翼自主飞行器,红外,寻线,超车,单片机1、系统方案的设计与论证1.1 系统总体框架整个系统分为系统模块、角度检测模块、电机驱动模块、电源模块、显示模块。
各模块的系统框图如图1所示。
图1 系统模块框图1.2 方案论证与比较(1)控制模块传统的51单片机广为应用,具有使用简便、便宜价格等优点,但是其运算能力较低,速度较慢,功能相对单一,难以实现较复杂的任务要求。
四旋翼自主飞行器(B)

四旋翼自主飞行器(B题)摘要摘要:本设计采用瑞萨公司的R5F100LEA型号单片机为核心处理芯片,控制有刷空心杯电机实现四旋翼的起飞和转向。
四旋翼在飞行区域上空自主行驶,通过MPU6050获得其飞行姿态,通过超声波模块测离地高度,用线性CCD采集下方路径信息从而获得航向。
四旋翼缓慢起飞后,首先悬停一会,然后沿着黑线往返AB之间,当偏航时,通过PWM和PID算法调整4个电机的转速以纠正飞机姿态和航向。
另外,采用一个5V继电器控制薄铁片的吸合和释放,完成空投。
为了安全和控制方便,我们调试了无线模块,实现远程一键启动。
AbstractThis design uses the R5F100LEA Renesas microcontroller as the core processing chip model, controlling brush coreless motor to achieve four rotor takeoff and steering. four-rotor aircraft flys over the regional travel automaticly, gets the flight attitude by MPU6050,ground clearance measured by ultrasonic module, using a linear CCD acquisition below the path information to obtain heading. Four-rotor aircraft takes off slowly and hovers for a moment firstly, then flys back and forth along the black line between AB, when the yaw, through the PWM and PID algorithm to adjust four motor speed to correct the aircraft attitude and heading. In addition, we use a 5V relay control thin sheet iron absorption and release, complete airdrop. For safe and easy to control, we debug the wireless module, then we can use only one key to take off four-rotor aircraft remotely..一、系统方案与论证1、平衡传感器的选择方案1:采用六轴传感器MPU6050进行处理,MPU6050集成3轴加速度计和3轴陀螺仪,能采取飞行器X轴、Y轴、Z轴3个方向的数据,进行姿态判断。
2014电子设计竞赛备选题(南航)
2014南京航空航天大学电子设计竞赛题目参赛说明1.赛题分为:初级组(一、二年级)和高级组(三、四年级)两大类。
2.一、二年级学生可独立组队,完成初级组赛题或完成高级组赛题中的“基本要求”部分,按初级组评奖;3.三、四年级学生组队参赛,完成高级组赛题,按高级组评奖。
不可参加初级组及评奖。
4.如果参赛队伍中有高年级和低年级学生混合组队的情况,则按高级组参赛处理。
低频信号调理电路(A题)•【高级组】一、任务设计并制作一个低频信号调理电路,其组成如图1所示。
包括放大器与滤波器等部分,其中,放大器增益可控;滤波器的类型(低通、高通或带通)以及通带、截止频率等参数可控。
放大器滤波器信号输入参数设置参数设置信号输出R L测试端子图1 低频信号调理电路组成二、要求1. 基本要求(1)调理电路的输入可以从mp3或信号源输入低频(100Hz~100kHz)信号,输出可以带600Ω负载或驱动8Ω喇叭(2~5W)。
(2)放大器部分。
输入低频正弦信号电压振幅为10mV,电压增益为0~40dB,可扩展到60 dB;增益步进程控可调,步进越小越好;电压增益误差不大于5%;通频带为100Hz~100kHz,接600Ω负载时,放大器输出电压无明显失真。
(3)滤波器部分。
当设置为低通滤波器时,其-3dB截止频率fc分别为3.4kHz、20kHz和50kHz三档程控可调。
当设置为高通滤波器时,其-3dB截止频率fc分别为200Hz、10kHz和30kHz三档程控可调。
当设置为带通滤波器时,其带宽为300Hz~3.4 kHz。
以上滤波器的截止频率的误差均不大于5%。
2. 发挥部分(1)具有AGC功能。
当调理电路的信号输入接mp3信号时,滤波器应设置为带通滤波器,输出负载为8Ω喇叭,此时调理电路的输入信号幅度在10mV~5V 间变化时,调理电路输出默认值保持在2V±0.1V内,波动越小越好。
(2)能够显示输入信号幅度大小及频率高低。
四旋翼自主飞行器(B题)
2013全国电子设计大赛瑞萨杯2013年全国大学生电子设计竞赛四旋翼自主飞行器(B题)【XX组】2013年9月6日目录1系统方案..................................... 错误!未定义书签。
1.1平衡传感器的论证与选择............ 错误!未定义书签。
1.2 巡线方案的论证与选择.............. 错误!未定义书签。
1.3停机坪寻找方案的论证与选择 (1)1.4控制系统的论证与选择.............. 错误!未定义书签。
2系统理论分析与计算.. (4)2.1 控制理论的分析 (4)2.1.1 四元数与欧拉角的理论计算 (4)2.1.2控制方式 (5)2.1.2 对PID的分析 (5)2.2节能论证 (6)2.2.1电源的选择 (6)3电路与程序设计 (7)3.1电路的设计 (7)3.1.1R5F100LEA 芯片引脚图 (7)3.1.2电机驱动电路 (8)3.1.3 传感器电路原理图 (9)3.2程序的设计 (9)3.2.1程序功能描述与设计思路 (9)3.2.2程序流程图 (10)4测试方案与测试结果 (12)4.1测试方案 (12)4.2 测试条件与仪器 (12)4.3 测试结果及分析 (12)4.3.1测试结果(数据) (12) (12)4.3.2测试分析与结论 (12)附录:源程序 (13)摘要四轴飞行器为成品改造玩具四轴航模,采用瑞萨公司的R5F100LEA型号单片机产生PWM通过驱动电路来驱动四个无心杯电机的转动产生一个向上的力,通过四元数算法处理传感器MPU6050采集的机身平衡信息并进行闭环的PID控制来保持机身的平衡。
通过激光收发来采集赛道信息来进行飞行器的循迹。
通过采集停机坪的信息进行降落。
经测试,系统基本可以完成题目要求。
关键字:四周飞行器R5F100LEA 四元数算法PID控制AbstractThe model aircraft Been modified by Four aircraft toys axis ,use of Renesas microcontroller to generate the PWM, R5F100LEA model through the drive circuit to drive four cups unintentional rotation of the motor produces an upward force, through the quaternion algorithm processing six-axis sensor MPU6050 collection balance information of the body and closed-loop PID control to maintain the body balance. Track by linear CCD to capture the tracking information for the aircraft. On the tube on then\tube through the infrared the information collected After testing, the system can be completed subject requirements.Keywords: four weeks Aircraft R5F100LEA Quaternions PID control algorithm1 系统方案本系统主要由中央处理单元,巡线模块,平衡控制单元,电机驱动模块,电源模块,停机坪信息采集单元组成。
2014电子设计竞赛题目全(本科组)

2014年TI杯大学生电子设计竞赛题A题:四旋翼飞行器1.任务设计制作一架能够自主飞行的四旋翼飞行器。
2.要求四旋翼飞行器能够完成以下飞行动作:(1)飞行器能够根据起飞前预置的指令起飞,飞离地面高度应超过30cm,飞行距离(水平)应超过60cm,然后飞行器应能平稳降落。
(30分)(2)飞行器能够根据指定(键盘设定)的飞行高度及降落地点(方向及距离)连续稳定地完成起飞、指定高度水平飞行、平稳降落等动作。
(20分)(3)飞行器能够根据起飞前预置的指令垂直起飞,起飞后能够在50cm以上高度平稳悬停5s以上,然后再平稳缓慢降落到起飞地点;起飞与降落地点水平距离不超过30cm。
(30分)(4)其他自主发挥设计的飞行动作。
(20分)(5)设计报告(20分)项目主要内容分数系统方案方案比较,方案描述 5设计与论证飞行器姿态测量方法飞行控制器控制方法与参数计算8测试测试方法与测试结果 5设计报告结构及规范性摘要,正文结构完整性、内容规范性 2小计203.说明(1)飞行器的姿态检测及飞行控制必须使用TIV A M4、C2000或MSP430等系列控制器。
(2)飞行器在完成每一项飞行动作期间不得以任何方式人为干预,如遥控等。
(3)飞行器的尺寸可自行选定。
(4)飞行方向以正北方向为0°、东北方向为45°、正东方向为90°等,以此类推;距离的单位为厘米(cm)。
(5)指定的降落地点是指降落地点距起飞地的水平距离及方向。
(6)平稳降落是指在降落过程中无明显的跌落、弹跳及着地后滑行等现象。
(7)能够完成要求(2)时,要求(1)可以免测。
(8)为确保安全,飞行器应在安全网中或在系留方式下工作(即以绳索将飞行器拴在地面固定物上)。
2014年TI 杯大学生电子设计竞赛题B 题:金属物体探测定位器4. 任务设计并制作一个可自主移动的金属物体探测定位器(以下简称探测器),可探测置于玻璃板下的金属物体并给出定位指示。
2014年电赛预测题
预测题目一:环绕声响应系统制作
任务:
设计一套环绕声响应系统。
在一块3平方米的平板上四脚外侧固定四个普通纸盆喇叭构成的声音发生装置,声音通过空气传输到全向麦克风进行接收,同时采用纸盆音响播放事先录制好的噪声源分别在其四轴进行播放。
用功率不大于1W的扬声器播放制定频率的音频信号,系统根据麦克风模块通过空气传播来自各声音发生模块的声音信号,恢复原始信号传输到信号处理装置,依次产生制定的环绕响应信号
预测题目一:四旋翼自主定点探测飞行器
1.任务
设计一个四旋翼自主飞行器。
2.基本要求
(1)四旋翼自主飞行器(下简称飞行器)摆放在A区,一键式启动飞行器起飞;飞向B区,在B区降落;然后从B区自主起飞飞到C区,在C 区降落,然后从C区自主起飞飞到D区,在D区降落,然后从D区自主起飞飞到A区,在A区降落停机。
注意:每次两区间飞行必须穿过示高线,每次停机停在外圈内。
四旋翼无人机操作技能培训题库及答案

四旋翼无人机操作技能培训题库一、单选题30题1、飞行器通电时间过长,执行以下动作的含义是什么:推上E杆,按一次shift键,拉下E杆。
( C )A、清空机载航点B、校准遥控器C、重新初始化D、强行启动2、通过遥控器的以下组合操作来调整标准双轴云台俯仰角度。
( D )A、shift键↑+滚转指令←→B、shift键↑+俯仰指令↓↑C、shift键↑+航向指令←→D、shift键↑+油门指令↓↑3、通过遥控器的以下组合操作来调整标准双轴云台滚转角度( C )A、shift键↑+滚转指令←→B、shift键↑+俯仰指令↓↑C、shift键↑+航向指令←→D、shift键↑+油门指令↓↑4、通过遥控器的以下组合来操作高清变焦摄像机的录制视频( C )A、shift键↑+滚转指令→B、shift键↑+俯仰指令↓↑C、shift键↑+滚转指令←D、shift键↑+油门指令↓↑5、通过遥控器的以下组合来操作高清变焦摄像机的拍摄照片( A )A、shift键↑+滚转指令→B、shift键↑+俯仰指令↓↑C、shift键↑+滚转指令←D、shift键↑+油门指令↓↑6、通过遥控器的以下组合操作来操作高清变焦摄像机的变焦( B )A、shift键↑+滚转指令→B、shift键↑+俯仰指令↓↑C、shift键↑+滚转指令←D、shift键↑+油门指令↓↑7、通过遥控器的以下组合操作来操作高清变焦摄像机的对焦( C )A、shift键↑+滚转指令←→B、shift键↑+俯仰指令↓↑C、shift键↑+航向指令←→D、shift键↑+油门指令↓↑8、如何切入自动驾驶模式。
( B )A、shift键↑+photo↓B、shift键↑+waypoint键↑C、waypoint键↑D、shift键↑+waypoint键↓9、如何切入自动返航模式。
( D )A、shift键↑+photo↓B、shift键↑+waypoint键↑C、waypoint键↑D、shift键↑+waypoint键↓10、如何切入动态锁定模式。
2017年全国大学生电子设计竞赛试题--设计报告

2017年全国大学生电子设计竞赛试题设计报告四旋翼自主飞行器探测跟踪系统(C题)【本科组】摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。
根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。
在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。
最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。
关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器一、系统方案根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。
1、飞行控制模块的选择飞行控制模块是四旋翼自主飞行器的核心。
按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。
为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。
目前看来,国内外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。
此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。
针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。
2、驱动模块的选择方案一:采用普通直流电机。
普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。
方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。
因系统精度较高,足够精确控制飞机的速度。
2014电子设计竞赛题目全(专科组)
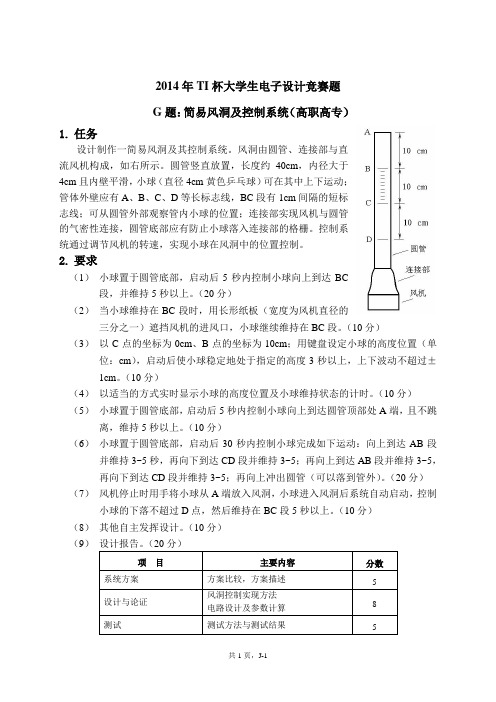
2014年TI杯大学生电子设计竞赛题G题:简易风洞及控制系统(高职高专)1.任务设计制作一简易风洞及其控制系统。
风洞由圆管、连接部与直流风机构成,如右所示。
圆管竖直放置,长度约40cm,内径大于4cm且内壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运动;管体外壁应有A、B、C、D等长标志线,BC段有1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。
控制系统通过调节风机的转速,实现小球在风洞中的位置控制。
2.要求(1)小球置于圆管底部,启动后5秒内控制小球向上到达BC段,并维持5秒以上。
(20分)(2)当小球维持在BC段时,用长形纸板(宽度为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段。
(10分)(3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3秒以上,上下波动不超过±1cm。
(10分)(4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。
(10分)(5)小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A端,且不跳离,维持5秒以上。
(10分)(6)小球置于圆管底部,启动后30秒内控制小球完成如下运动:向上到达AB段并维持3~5秒,再向下到达CD段并维持3~5;再向上到达AB段并维持3~5,再向下到达CD段并维持3~5;再向上冲出圆管(可以落到管外)。
(20分)(7)风机停止时用手将小球从A端放入风洞,小球进入风洞后系统自动启动,控制小球的下落不超过D点,然后维持在BC段5秒以上。
(10分)(8)其他自主发挥设计。
(10分)(9)设计报告。
(20分)项目主要内容分数系统方案方案比较,方案描述 5设计与论证风洞控制实现方法电路设计及参数计算8测试测试方法与测试结果 5设计报告结构及规范性摘要,正文结构完整性、内容规范性 2小计203.说明(1)题中“到达XX段”是指,小球的整体全部进入该段内;(2)题中“维持”是指,在维持过程中小球整体全部不越过该段的端线;(3)小球的位置以其中心点为准(即小球的上沿切线向下移2cm,或下沿切线向上移2cm);(4)直流风机的供电电压不得超过24V,注意防止风机叶片旋转可能造成的伤害;可在圆管及其周围设置传感器检测管内小球的位置;可将圆管、连接部与直流风机安装在硬质板或支架上,以便于使圆管保持竖直状态,并保持风洞气流通畅。
四旋翼自主飞行器(B题)
2013 年全国大学生电子设计竞赛试题参赛注意事项(1)9 月 4 日 8:00 竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高 职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生 身份的有效证件(如学生证)随时备查。
(4)每队严格限制 3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设 计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违 纪参赛队取消评审资格。
(6)9 月 7 日 20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
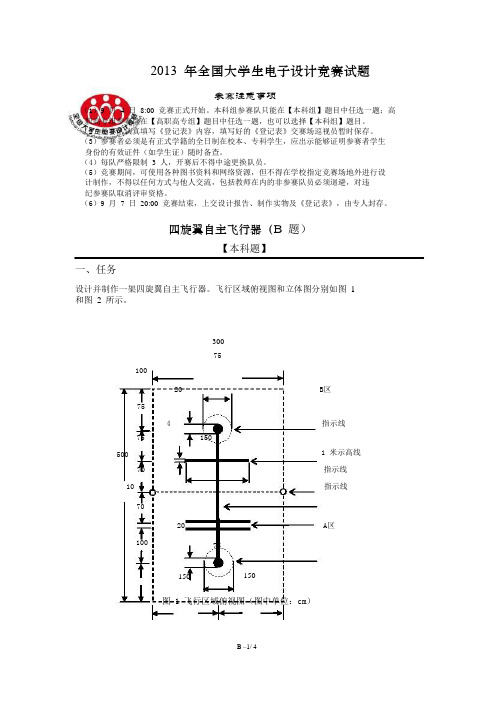
四旋翼自主飞行器(B 题)【本科题】一、任务设计并制作一架四旋翼自主飞行器。
飞行区域俯视图和立体图分别如图 1 和图 2 所示。
300 7510020754 75 50070 10 702010075A 区1501 米示高线 指示线 指示线 指示线 B 区150 150图 1 飞行区域俯视图(图中单位:cm )示高线100200250300250图 2 飞行区域立体图(图中单位:cm)二、要求1. 基本要求(1)四旋翼自主飞行器(下简称飞行器)摆放在图 1 所示的 A 区,一键式启动飞行器起飞;飞向 B 区, B 区降落并停机;在飞行时间不大于 45s。
(2)飞行器摆放在 B 区,一键式启动飞行器起飞;飞向 A 区,在 A 区降落并停机;飞行时间不大于 45s。
2. 发挥部分(1)飞行器摆放在 A 区,飞行器下面摆放一薄铁片,一键式启动,飞行器拾取薄铁片并起飞。
(2)飞行器携带薄铁片从示高线上方飞向 B 区,并在空中将薄铁片投放到B 区;飞行器从示高线上方返回 A 区,在 A 区降落并停机。
小型四旋翼直升机的自动控制系统设计
Major:
Mechanical Manufacturing and Automation Chen Long Prof. Sam Ge School of Mechatronics Engineering
Author: Advisor: School:
独创性声明
本人声明所呈交的学位论文是本人在导师指导下进行的研究工作 及取得的研究成果。据我所知,除了文中特别加以标注和致谢的地方 外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为 获得电子科技大学或其它教育机构的学位或证书而使用过的材料。与 我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的 说明并表示谢意。
II
ABSTRACT
Keywords: quadrotor, automatic control system, PD controller, CMAC
III
目录
目 录
第一章 绪 论 ................................................................................................................. 1 1.1 研究工作的背景与意义 ................................................................................... 1 1.2 四旋翼的发展历史 ........................................................................................... 2 1.3 国内外研究现状 ............................................................................................... 3 1.4 本文主要目标和创新 ....................................................................................... 6 第二章 小型四旋翼的数学模型 ................................................................................. 7 2.1 小型四旋翼的动力学分析 .............................................................................. 7 2.2 坐标系定义和坐标旋转 ................................................................................... 8 2.2.1 坐标系定义 .............................................................................................. 8 2.2.2 坐标旋转 .................................................................................................. 9 2.3 小型四旋翼数学模型的建立 ........................................................................ 12 2.3.1 小型四旋翼的姿态动力学模型 ........................................................... 12 2.3.2 小型四旋翼的位置动力学模型 ........................................................... 13 2.4 本章小结 .......................................................................................................... 13 第三章 小型四旋翼的控制器设计 ........................................................................... 14 3.1 总体控制器设计 ............................................................................................. 14 3.2 姿态控制器设计 ............................................................................................. 15 3.2.1 姿态动力学模型的简化 ....................................................................... 15 3.2.2 姿态控制器设计 .................................................................................... 16 3.2.2.1 小脑模型神经网络 ...................................................................... 17 3.2.2.2 PD 和 CMAC 的复合控制算法 ................................................... 18 3.3 水平位置控制器设计 ..................................................................................... 20 3.4 高度控制器设计 ............................................................................................. 21 3.5 本章小结 .......................................................................................................... 22 第四章 自动控制系统实验平台的搭建 ................................................................... 23 4.1 自动控制系统实验平台的总体架构 ............................................................ 23 4.2 动力系统 .......................................................................................................... 23 4.3 传感器系统 ..................................................................................................... 25 4.3.1 姿态参考系统 ........................................................................................ 25 4.3.2 位置参考系统 ........................................................................................ 26
四旋翼飞行器设计考试试题及答案
四旋翼飞行器设计考试试题及答案一、试题1. 请简要描述四旋翼飞行器的原理和工作原理。
2. 在四旋翼飞行器设计中,哪些因素会影响其飞行性能?请列举并解释至少三个因素。
3. 请说明四旋翼飞行器的控制系统中的传感器种类及其各自的功能。
4. 在四旋翼飞行器的设计中,重心的位置有何重要性?请解释。
5. 请简要描述四旋翼飞行器的自动驾驶技术,并列举至少两种常用的自动驾驶模式。
6. 在四旋翼飞行器设计中,如何选择合适的电池以提供持久的飞行时间?请阐述你的设计考虑。
二、答案1. 四旋翼飞行器是一种多旋翼飞行器,由四个螺旋桨和电机组成。
其工作原理是通过控制电机的转速和扭矩,通过改变每个电机的相对转速和扭矩来产生力矩和推力,从而实现悬停以及姿态控制。
2. 影响四旋翼飞行器飞行性能的因素包括但不限于:a. 重量与推力比:四旋翼飞行器的负载越大,需要的推力也越大,因此需要更强大的电机和电池才能提供足够的动力,影响其续航时间和飞行灵活性。
b. 气动特性:飞行器的设计需要考虑气动力学特性,如气动阻力和升力分布,以确保飞行器具有稳定的飞行性能和操控特性。
c. 控制系统:四旋翼飞行器的控制系统负责姿态控制和稳定控制,设计合理的控制算法和传感器选择能够影响飞行器的控制准确性和稳定性。
3. 四旋翼飞行器的控制系统主要依赖于以下传感器:a. 加速度计:用于检测飞行器的加速度和倾斜角度,为姿态控制提供数据支持。
b. 陀螺仪:用于检测飞行器的角速度和旋转角度,为姿态控制提供数据支持。
c. 气压计:用于测量飞行器的高度和气压,为高度控制和气压补偿提供数据支持。
d. GPS导航:用于提供飞行器的全球定位信息,使其能够实现准确定位和导航功能。
4. 重心的位置对四旋翼飞行器设计至关重要。
重心过高或过低都会影响飞行器的稳定性和操控性能。
如果重心过高,飞行器会变得不稳定,容易失去平衡;如果重心过低,飞行器会变得笨重且不敏感,操纵起来困难。
5. 四旋翼飞行器的自动驾驶技术包括但不限于:a. GPS导航自动驾驶:通过接收GPS信号,飞行器能够自动定位和导航,实现航线跟踪、航点飞行等功能。
电赛四旋翼飞行器

2014年电子设计竞赛四旋翼自主飞行器(G题)2013年9月11日目录摘要关键词 (1)一系统方案 (2)1.1控制系统的选择 (2)1.2飞行姿态控制的论证与选择 (2)1.3电机的选择 (2)1.4高度测量模块的论证与选择 (2)1.5电机调速模块的选择 (2)1.6循迹模块的方案选择 (2)1.7薄铁片拾取的方案的论证与选择 (2)1.8角速度与角加速度测量模块选择 (3)二设计与论证 (3)2.1控制方法设计 (3)2.1.1降落及飞行轨迹控制设计 (3)2.1.2飞行高度控制设计 (4)2.1.3飞行姿态控制设计 (4)2.1.4铁片拾取与投放控制设计 (4)2.2参数计算 (5)三理论分析与计算........................................................ (5)3.1Pid控制算法分析................................................................... ...........................5.3.2飞行姿态控制单元 (6)四电路与程序设计 (7)4.1系统组成 (7)4.2 原理框图 (7)4.3电路图 (8)4.4系统软件与流程图 (9)五测试方案与测试条件 (11)5.1测试方案 (11)5.2测试条件 (11)六结论 (11)附录 (12)附一:元器件明细表 (12)附二:仪器设备清单 (12)附三:源程序 (12)摘要:本系统由数据采集、数据信号处理和飞行姿态和航向控制部分组成。
系统选用STC89C52单片机作为主控芯片,对从MPU-6050芯片读取到的一系列数据进行PID算法处理并给飞行器的电调给出相应指令从而达到对飞行器的飞行姿态的控制。
采用MPU-6050芯片采集四旋翼飞行器的三轴角速度和三轴角加速度数据。
用红外传感器来检测出黑色指示线,以保证飞行器不脱离指定飞行区域及达到指定圆形区域。
四旋翼自主飞行器探测跟踪系统设计竞赛试题

2017年全国大学生电子设计竞赛试题设计报告四旋翼自主飞行器探测跟踪系统(C题)摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。
根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。
在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。
最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。
关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器一、系统方案根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。
1、飞行控制模块的选择飞行控制模块是四旋翼自主飞行器的核心。
按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。
为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。
目前看来,国外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。
此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。
针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。
2、驱动模块的选择方案一:采用普通直流电机。
普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。
方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。
因系统精度较高,足够精确控制飞机的速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年TI 杯西安邮电大学大学生电子设计竞赛
四旋翼自主飞行器设计(C 题)
一、 任务
设计并制作一架四旋翼自主飞行器。
飞行区域俯视图如图1所示。
1和2是在地面画出的10环靶标,10环靶为直径5厘米的黑色区域,其余各环直径分别以5厘米递增。
3是围绕靶标树起的围墙,边长1.5米,高度1.2米,并在高度1米处画有高度线。
图1 飞行区域俯视图
二、 要求:
1.基本要求
(1)四旋翼自主飞行器(下简称飞行器)摆放在图1所示的10环靶标黑色区域,一键式启动飞行器起飞,垂直起飞高度在1米到1.2米范围时,
以明显方式示警(灯或蜂鸣器),并保持该高度5秒和示警;
(2)飞行器在保持高度区域内(1米—1.2米)向十环靶标投放物体,物体材料自定,但外围直径不得小于5角硬币。
2.发挥部分
(1)飞行器由十环黑色区域起飞后,到达高度区域后,示警并保持5秒,然后降落到十环靶标。
(2)其它扩展功能。
(3)飞行器自身自定十字定位记号,以便降落后确定环数。
三、说明:
(1)飞行器桨叶旋转速度高,有危险!请务必注意自己及他人的人身安全。
(2)飞行器控制板由各队自主选定。
(3)飞行器可自制或外购,带防撞圈,外形尺寸(含防撞圈)限定为:长度≤50cm,宽度≤50cm。
飞行器机身必须标注参赛队号。
(4)允许测试2次,每次测试全程不得更换电池。
两次测试之间允许更换电池,更换电池时间小于2分钟。
(5)飞行器不得遥控,飞行过程中不得人为干预。
(6)飞行器飞行期间,触及地面后自行恢复飞行的,酌情扣分;触地后5s 内不能自行恢复飞行视为失败,失败前完成动作仍计分。
(7)飞行器起飞,距地面高度10cm以上视为飞离地面。
(8)一键式启动是指飞行器摆放后,只允许按一个键启动。
四、评分标准。