基于UGMotion的救生缓降器仿真研究
基于UG的升降机构的建模及运动仿真

基于UG的升降机构的建模及运动仿真升降机是工业自动化生产中非常重要的机构,广泛应用于各种机械设备的升降装置。
在升降机的构造中,升降机构是起到关键作用的部分之一。
本文将基于UG软件对升降机构进行建模和运动仿真。
首先,在UG软件中绘制出升降机构的三维模型。
升降机构主要由支架、升降柱、伸缩杆、导轨、保护套等零件组成。
在绘图过程中,需要根据具体的工程要求进行尺寸和配比的设计。
其次,根据升降机的工作原理和运动规律,建立升降机构的动力学模型,并对其进行运动仿真。
升降机的运动状态可以分为升降、下降、伸出和收回四种类型。
在每种状态下,升降机的运动规律都是不同的,需要针对性地进行建模和仿真。
在进行运动仿真时,需要当前升降机状态的初始参数,例如各个零部件的初始位置、速度、加速度等,同时还需要给定的系统参数,例如负载重量、电动机的功率等。
调整这些参数可以让仿真结果更加贴近实际。
最后,通过实际测量和仿真结果的对比,对升降机构进行优化改进。
对不合理的部分进行修正和调整,使其在升降、下降、伸出和收回等不同工况下均能保持良好的性能和稳定性,从而保证升降机的正常运转和安全性。
综上所述,通过UG软件对升降机构进行建模和运动仿真,可以充分了解升降机的结构和运动规律,有助于发现潜在的问题并加以优化改进,提高升降机的精度和有效性,提高生产效率和安全性,从而更好地满足工业自动化生产的需求。
数据分析是一个非常有效的方法,可以用来研究各种信息。
无论是个人还是公司,皆可以从数据分析中受益。
这里,我们将列出一些数据,并进行分析,以展示数据分析的价值和实际意义。
以一个假设的数据集为例:一家服装公司在过去三个月内销售了1000件女装,其中450件为裙子,300件为上衣,250件为外套。
以下是对该数据集的分析结果:1.销售额分析这家服装公司在过去三个月总共获得了销售额1500万美元。
从销售额来看,裙子销售额为675万美元,上衣销售额为450万美元,外套销售额为375万美元。
基于UG的减速器的建模及运动仿真
பைடு நூலகம்摘 引
录
要........................................................................................................................................................................................ - 2 言...................................................................................................................................................................................... - 3 -
第一章 绪论 ................................................................................................................................................................................ - 4 1.1 减速器简介 ............................................................................................................................................................................ - 4 1.2Unigraphics 软件简介 ....
铁路救援起重机模拟器视景仿真系统的研究
起 重 机 控 制 模 块
统 , 要 通过 多相机 技术 分 别 在不 同的终 端 显 示 即 可 。根 据视 景 系 只需 统 的功能需 求 , 者将 系统 分 成起 重 机 控制 模 块 、 挥 员控 制 模 块 、 笔 指 动 画模 块 、 音模块 、 声 网络通讯 模块 和资 源管理 模块 6部 分 , 图 1 示 。 如 所
第l 5卷 第2 期
21 0 2年 6月
成都 电子机械高等专科学校学报
J u n l fCh n d lc r me h n c lCol o r a e  ̄ u E e to c a i a o l e
Vo1 1 No. . 5, 2 J e., 01 un 2 2
我 国铁路 作业 人员 培训 效率 , 改善 培训效 果 , 快铁 路事 故处理 速度 。 加
收 稿 日期 : 0 2— 2— 4 2 1 0 2 作者简 介:乔辉( 96一 ) 男( 18 , 汉族) 河南开封人 , , 在读硕士研 究生 , 究方 向: 研 视景仿真 , 物理动画。 张 玉 平 ( 96一 ) 男( 17 , 汉族 ) 四川 彭 州人 , , 副教 授 , 士 , 究方 向 : 能控 制 。 硕 研 智
T c n l yC . Ld Chn d 1o 1Chn ) eh o g o ,t , eg u6 03 , i a o
Ab t a t:Th iu l i lt n s se p a s l i o a t r l i h al y i s u r n d i i g smu a o y tm ,I r e o mp o e t e sr c e v s a smu a o y tm l y al mp  ̄ n o e n t e r wa e c e c a e rv n i lt r s se i i n o d r t i r v h
矿用破障救援机器人行走机构设计及仿真
矿用破障救援机器人行走机构设计及仿真机设06-5班汪林清指导老师:罗静摘要:目前灾难救援机器大多为陆上、空中避障探测救援,对于需要破障进入塌方、废墟内部的情况,常规挖掘钻探设备很难及时有效搜救被困人员。
该破障救援装置主要针对煤矿塌方等内部救援而设计。
本设计采用仿尺蠖运动机理,以液压为动力,前后两部分互为支撑,屈伸爬行,前部采用扩张增力机构,排除障碍。
在坍塌的巷道中,伸缩前进,到达预定地点,为幸存的受困人员输送药物、食品和氧气等,为救援人员争取更多的救援时间,提高救援效率,避免二次伤害的发生。
设计中分析计算了双边铰杆增力机构的各方面参数,为双边铰杆增力机构的更好研究与应用提供了理论基础,并自行设计了分级双边铰杆增力机构,克服了在输入力一定的情况下,初始输出力较小的局限性,极大地提高了机构的承载能力;文中采用现代设计理论与方法,应用Pro/E、3DMAX等机械设计软件进行三维实体动态设计、机构运动仿真、有限元分析、结构优化设计及行为建模等,结合实际生产环境,最大限度的提高工作效率,减少产品设计周期,降低生产成本。
关键词:破障救援机器人分级双边铰杆增力机构行走机构仿真Abstract:Currently disaster relief for the land, the air machine mostly obstacle-avoidance and detection rescue, the need for breaking into the landslide barrier, and ruins of conventional mining drilling equipment to timely and effective rescue trapped workers. The broken disabled rescue device aimed at mines and other internal aid design.This design uses the imitation of the cankerworm's movement and mechanism of hydraulic power. After two parts are supported by crawling, the front adopts the power mechanism to unblock obstacle. Crawling in the collapsed tunnel for surviving sites delivering drugs, food and oxygen, for the rescue crews get more time, improve efficiency and to avoid secondary damage relief. Design and calculation for the institution of power mechanism of double-sided hinge-rod overcoming the limitations of small initial output force. It has greatly improved the capacity of the institution. Using the modern design theory and method, Pro/E and 3DMAX, this design has realized three-dimensional dynamic mechanism motion simulation, the finite element analysis, structural optimization design and behavioral modeling. With actual production environment, it can improve the work efficiency, reduce product design cycle and reduce production cost.Keywords: unblocking and rescuing; robot; power mechanism of classifying double-sided hinge-rod; running mechanism ; emulation一、概述由于目前的灾难救援机器大多为陆上、空中避障探测救援。
矿用救援机器人悬架平衡机构建模与仿真_刘建

摘 要:为了提高矿用救援机器人的平顺性和越野性,将被动适应式空间平衡连 杆 机 构 与 履 带 行 驶 机 构 相 结 合,根 据对角线对称布置和中心线对称布置两种空间平衡连杆机构,分别设计了矿用 救 援 机 器 人 悬 架。 基 于 笛 卡 尔 坐 标 系建立了两种悬架多刚体模型,计算其自由度为2,表明两 种 悬 架 均 具 有 差 动 性 能;通 过 几 何 方 法 推 导 出 对 角 线 对 称的悬架具有线性均化作用。在 Recurdyn多体系统仿真环境下进行运动 学 仿 真,并 使 用 蒙 特 卡 洛 法 进 行 试 验,对 试验结果进行线性回归分析,结果表明:所设计的两种矿用救援机器人悬架均具 有 差 动 性 能;与 中 心 线 对 称 的 空 间 平衡连杆机构悬架相比,对角线对称的空间平衡连杆机构悬架还具有线性均化 能 力,因 此,采 用 对 角 线 对 称 的 空 间 平衡连杆机构悬架。所设计悬架的零部件布置于隔爆 机 箱 外 部,不 必 考 虑 悬 架 与 隔 爆 机 箱 的 密 封,简 化 了 结 构 设 计 ,满 足 矿 用 救 援 机 器 人 运 动 功 能 的 需 求 。 关 键 词 :矿 用 救 援 机 器 人 ;空 间 平 衡 连 杆 机 构 ;差 动 机 构 ;蒙 特 卡 洛 方 法 ;运 动 学 分 析
基于UG的四连杆机构的运动分析仿真[1]
![基于UG的四连杆机构的运动分析仿真[1]](https://img.taocdn.com/s3/m/05b9da0a2e60ddccda38376baf1ffc4fff47e243.png)
基于UG的四连杆机构的运动分析仿真[1]第24卷第4期轻工机械Vol. 24,No. 4.2006年12月L ight IndustryMachineryD ec. , 2006[研究·设计]基于UG的四连杆机构的运动分析仿真沈庆云,沈自林(图章注释新建图章 sun2008-9-27 17:58:05空白)(佛山科学技术学院,广东佛山528000)0 引言机构的运动分析,就是对机构的位移、轨迹、速度、加速度进行分析,根据原动件的运动规律,求解出从动件的运动规律。
由于机构的复杂性,用传统的方法分析机构的运动非常费时,且精度低。
本文以世界著名的CAD .CA E.CAM系统U nigraphics (简称U G )软件为工具,用计算机模型代替机构的实际模型,通过求解计算机模型,获得精确的机构运动参数,用图形和动画来模拟机构的实际运动过程,这是传统的分析方法所不能比拟的。
在UG的机构仿真模块(U G ScenarioforM otion)中嵌入求解器ADAM SKinem atics,可以对二、三维机构进收稿日期: 2005210231行复杂的运动学、动力学分析及设计仿真,分析产品的临界位置、反作用力、速度及加速度。
摘要:利用基于UG的机构运动分析模块,详细介绍了一套完整的四连杆机构的参数化建模设计、运动副的创建与运动仿真。
关键词:参数化建模;连杆机构;运动仿真中图分类号: TH 122 文献标志码:A 文章编号: 100522895 (2006) 04200742021 四连杆参数化建模与装配在这里预先设定四连杆的长度数据及几何造型如表1所示。
将表1各组件装配,即可形成1个四连杆机构(如图1)。
在计算机中创建连杆机构,将连杆1、连杆2、连杆3和机架分别创建成连杆。
图1 四连杆机构表1 四连杆基本参数2 创建运动副(J oints )考虑到所有连杆均作旋转运动,将建立4个旋转副,其中有2个旋转副与地固定(只要将机架设成与地固定即可实现)。
起落装置虚拟试验及缓冲性能优化
起落装置虚拟试验及缓冲性能优化李晓霏许锋南京航空航天大学,南京,210000摘要:以某直升机起落架为例,基于LMS Virtual. Lab Motion和LMS Imagine. Lab AMESim建立起落架虚拟试验联合仿真平台,简化仿真步骤,实现快速、准确的起落架虚拟试验。
首先在VL Motion中建立参数化起落架虚拟试验模型,包括落震模型和摆振模型;再利用AMESim建立多种缓冲器模型,并通过两款软件实现联合仿真。
基于iSIGHT优化平台集成虚拟试验平台,以油针截面为设计变量,优化起落架缓冲性能,在降低缓冲器最大轴向力的同时,显著提高缓冲器效率。
关键词:虚拟试验; LMS;联合仿真;性能优化中图分类编号:V226Research on the virtual experiment and optimization of landing gearLi Xiaofei Xu FengNanjing University of Aeronautics and Astronautics,Nanjing,210000 Abstract: Based on LMS Virtual. Lab Motion and LMS Imagine. Lab AMESim, a virtual experiment platform was built to provide a fast and simple way to carry out the simulation of landing gear dropping and shimmy. First, it built the dynamical model of virtual experiment including both dropping and shimmy of landing gear by using VL Motion. Then the buffer model was built applying the AMESim. Based on the method of combined simulation of these two software, it analyzed both dropping and shimmy performance of landing gear. Based on optimization platform iSIGHT, the pin section radius is choosedto be the design variable to optimize the performance of dropping. While reduced the maximum force, it increased the efficiency of the buffer.Key words: virtual experiment; LMS; combined simulation; optimization0 引言起落架用于飞机的起降滑跑、机场滑行和在着陆及在地面是减缓撞击。
基于UG的矿用减速器虚拟装配与运动仿真应用
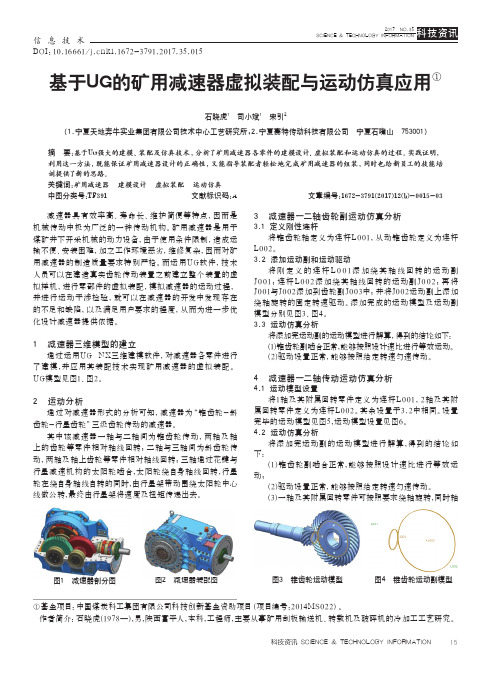
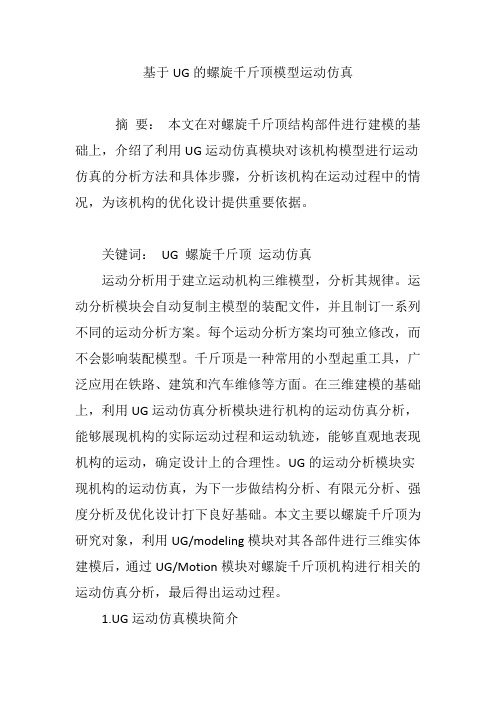
信 息 技 术15科技资讯 SCIENCE & TECHNOLOGY INFORMATIONDOI:10.16661/ki.1672-3791.2017.35.015基于UG的矿用减速器虚拟装配与运动仿真应用①石晓虎1 司小斌1 宋引2(1.宁夏天地奔牛实业集团有限公司技术中心工艺研究所;2.宁夏赛特传动科技有限公司 宁夏石嘴山 753001)摘 要:基于UG强大的建模、装配及仿真技术,分析了矿用减速器各零件的建模设计、虚拟装配和运动仿真的过程。
实践证明,利用这一方法,既能保证矿用减速器设计的正确性,又能指导装配者轻松地完成矿用减速器的组装,同时也给新员工的技能培训提供了新的思路。
关键词:矿用减速器 建模设计 虚拟装配 运动仿真中图分类号:TP391 文献标识码:A 文章编号:1672-3791(2017)12(b)-0015-03①基金项目:中国煤炭科工集团有限公司科技创新基金资助项目(项目编号:2014MS022)。
作者简介:石晓虎(1978—),男,陕西富平人,本科,工程师,主要从事矿用刮板输送机、转载机及破碎机的冷加工工艺研究。
减速器具有效率高、寿命长、维护简便等特点,因而是机械传动中极为广泛的一种传动机构。
矿用减速器是用于煤矿井下开采机械的动力设备,由于使用条件限制,造成运输不便、安装困难,加之工作环境恶劣,维修复杂,因而对矿用减速器的制造质量要求特别严格。
而运用UG软件,技术人员可以在建造真实齿轮传动装置之前建立整个装置的虚拟样机,进行零部件的虚拟装配,模拟减速器的运动过程,并进行运动干涉检验,就可以在减速器的开发中发现存在的不足和缺陷,以及满足用户要求的程度,从而为进一步优化设计减速器提供依据。
1 减速器三维模型的建立通过运用UG NX三维建模软件,对减速器各零件进行了建模,并应用其装配技术实现矿用减速器的虚拟装配。
UG模型见图1、图2。
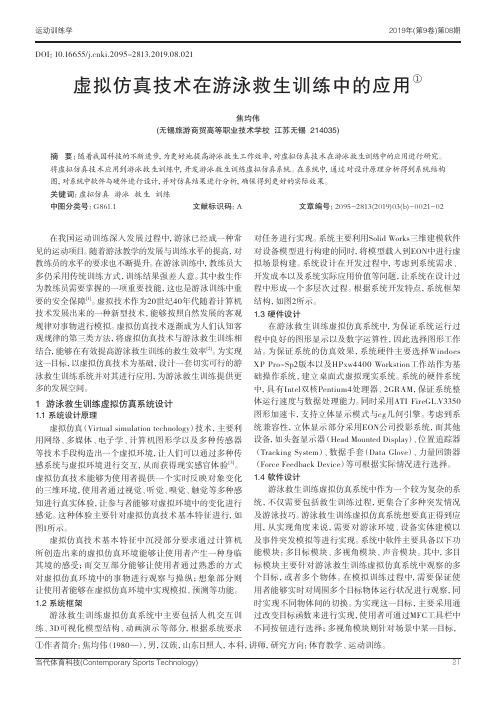
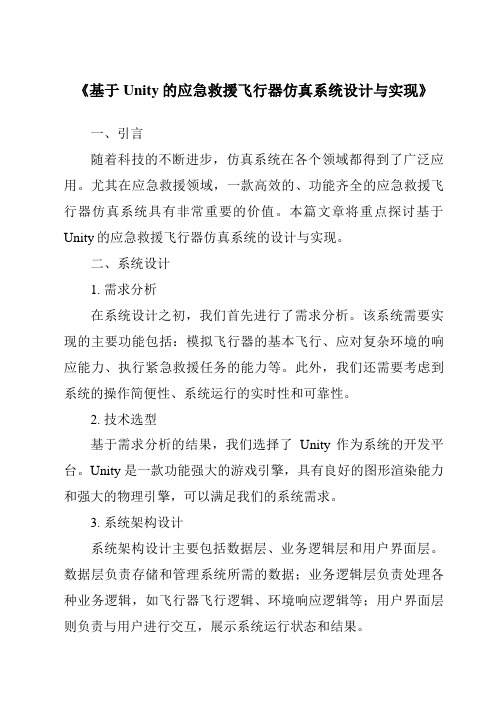
2 运动分析通过对减速器形式的分析可知,减速器为“锥齿轮-斜齿轮-行星齿轮”三级齿轮传动的减速器。
基于UG的螺旋千斤顶模型运动仿真
基于UG的螺旋千斤顶模型运动仿真摘要:本文在对螺旋千斤顶结构部件进行建模的基础上,介绍了利用UG运动仿真模块对该机构模型进行运动仿真的分析方法和具体步骤,分析该机构在运动过程中的情况,为该机构的优化设计提供重要依据。
关键词:UG 螺旋千斤顶运动仿真运动分析用于建立运动机构三维模型,分析其规律。
运动分析模块会自动复制主模型的装配文件,并且制订一系列不同的运动分析方案。
每个运动分析方案均可独立修改,而不会影响装配模型。
千斤顶是一种常用的小型起重工具,广泛应用在铁路、建筑和汽车维修等方面。
在三维建模的基础上,利用UG运动仿真分析模块进行机构的运动仿真分析,能够展现机构的实际运动过程和运动轨迹,能够直观地表现机构的运动,确定设计上的合理性。
UG的运动分析模块实现机构的运动仿真,为下一步做结构分析、有限元分析、强度分析及优化设计打下良好基础。
本文主要以螺旋千斤顶为研究对象,利用UG/modeling模块对其各部件进行三维实体建模后,通过UG/Motion模块对螺旋千斤顶机构进行相关的运动仿真分析,最后得出运动过程。
1.UG运动仿真模块简介UG运动仿真模块可以进行机构的干涉分析,可以跟踪零件的运动轨迹,分析机构中零部件的速度、加速度、作用力及反作用力和力矩等。
运动仿真模块的分析结果可以指导修改零件的调整零件的材质或结构设计,其设计更改可以反映直接反映到装配主模型中。
2.仿真方案的创建运动仿真方案的创建是进行运动仿真的关键。
创建模型仿真,首先需要确定各零件部件之间的静态关系,对连杆进行运动仿真定义。
根据装配模型建立一个新的仿真模型时,仿真模块会自动将装配模型中的一个个零部件(Part),映射成仿真模型中的连杆(Link),而且会选择一个连杆为接地连杆。
因此,首先要定义仿真模型的连杆。
(1)创建连杆(links)L001。
打开事先已经创建的螺旋千斤顶装配模型,如图1所示。
单击运动工具条上的【连杆】按钮,打开连杆对话框,在视图区选择底座的中心直线为连杆,由于直线没有质量、体积,可以自定义以上中心直线的质量、体积。
虚拟仿真技术在游泳救生训练中的应用
2019年(第9卷)第08期运动训练学DOI:10.16655/ki.2095-2813.2019.08.021虚拟仿真技术在游泳救生训练中的应用①焦均伟(无锡旅游商贸高等职业技术学校 江苏无锡 214035)摘 要:随着我国科技的不断进步,为更好地提高游泳救生工作效率,对虚拟仿真技术在游泳救生训练中的应用进行研究。
将虚拟仿真技术应用到游泳救生训练中,开发游泳救生训练虚拟仿真系统。
在系统中,通过对设计原理分析得到系统结构图,对系统中软件与硬件进行设计,并对仿真结果进行分析,确保得到更好的实际效果。
关键词:虚拟仿真 游泳 救生 训练中图分类号:G861.1 文献标识码:A 文章编号:2095-2813(2019)03(b)-0021-02①作者简介:焦均伟(1980—),男,汉族,山东日照人,本科,讲师,研究方向:体育教学、运动训练。
在我国运动训练深入发展过程中,游泳已经成一种常见的运动项目。
随着游泳教学的发展与训练水平的提高,对教练员的水平的要求也不断提升。
在游泳训练中,教练员大多仍采用传统训练方式,训练结果强差人意。
其中救生作为教练员需要掌握的一项重要技能,这也是游泳训练中重要的安全保障[1]。
虚拟技术作为20世纪40年代随着计算机技术发展出来的一种新型技术,能够按照自然发展的客观规律对事物进行模拟。
虚拟仿真技术逐渐成为人们认知客观规律的第三类方法,将虚拟仿真技术与游泳救生训练相结合,能够在有效提高游泳救生训练的救生效率[2]。
为实现这一目标,以虚拟仿真技术为基础,设计一套切实可行的游泳救生训练系统并对其进行应用,为游泳救生训练提供更多的发展空间。
1 游泳救生训练虚拟仿真系统设计1.1 系统设计原理虚拟仿真(Virtual simulation technology )技术,主要利用网络、多媒体、电子学、计算机图形学以及多种传感器等技术手段构造出一个虚拟环境,让人们可以通过多种传感系统与虚拟环境进行交互,从而获得现实感官体验[3]。
《基于Unity的应急救援飞行器仿真系统设计与实现》
《基于Unity的应急救援飞行器仿真系统设计与实现》一、引言随着科技的不断进步,仿真系统在各个领域都得到了广泛应用。
尤其在应急救援领域,一款高效的、功能齐全的应急救援飞行器仿真系统具有非常重要的价值。
本篇文章将重点探讨基于Unity的应急救援飞行器仿真系统的设计与实现。
二、系统设计1. 需求分析在系统设计之初,我们首先进行了需求分析。
该系统需要实现的主要功能包括:模拟飞行器的基本飞行、应对复杂环境的响应能力、执行紧急救援任务的能力等。
此外,我们还需要考虑到系统的操作简便性、系统运行的实时性和可靠性。
2. 技术选型基于需求分析的结果,我们选择了Unity作为系统的开发平台。
Unity是一款功能强大的游戏引擎,具有良好的图形渲染能力和强大的物理引擎,可以满足我们的系统需求。
3. 系统架构设计系统架构设计主要包括数据层、业务逻辑层和用户界面层。
数据层负责存储和管理系统所需的数据;业务逻辑层负责处理各种业务逻辑,如飞行器飞行逻辑、环境响应逻辑等;用户界面层则负责与用户进行交互,展示系统运行状态和结果。
三、系统实现1. 飞行器模型建立在Unity中,我们使用3D建模工具创建了飞行器模型,并进行了详细的纹理贴图和材质设置。
同时,我们还为飞行器添加了物理属性和动力学特性,使其在仿真环境中能够进行真实的飞行运动。
2. 场景搭建与优化为了满足仿真需求,我们搭建了多个仿真场景,包括城市、山区、水域等复杂环境。
同时,为了确保系统运行的实时性,我们对场景进行了优化,如减少不必要的细节、使用LOD(Level of Detail)技术等。
3. 业务逻辑实现业务逻辑的实现是系统的核心部分。
我们根据需求分析的结果,实现了飞行器的基本飞行逻辑、环境响应逻辑以及执行紧急救援任务的能力等。
此外,我们还实现了飞行器的自主导航和远程控制功能。
4. 用户界面设计用户界面是用户与系统进行交互的桥梁。
我们设计了一个简洁、直观的用户界面,可以实时显示飞行器的位置、速度、姿态等信息,同时还可以显示仿真环境的状态和任务执行情况。
《基于Unity的应急救援飞行器仿真系统设计与实现》
《基于Unity的应急救援飞行器仿真系统设计与实现》一、引言随着科技的不断发展,模拟技术在应急救援领域得到了广泛的应用。
为了提高救援工作的效率和准确性,我们基于Unity游戏引擎开发了一款应急救援飞行器仿真系统。
该系统可对救援飞行器进行三维模拟,提供真实的飞行环境与场景,使救援人员能够在模拟环境中进行飞行操作和救援任务演练,为实际救援工作提供有力支持。
二、系统设计1. 需求分析在系统设计阶段,我们首先对救援飞行器仿真系统的需求进行了详细分析。
系统需要具备以下功能:(1)三维场景建模:能够模拟出真实救援环境的场景,包括建筑物、地形、气候等。
(2)飞行器建模与仿真:需要能够精确地模拟出救援飞行器的各项性能参数和飞行特性。
(3)交互式操作:提供直观的交互操作方式,使救援人员能够在模拟环境中进行操作练习。
(4)任务模拟:能够模拟出各种救援任务场景,如搜索、运输、投放等。
2. 系统架构根据需求分析,我们设计了基于Unity的应急救援飞行器仿真系统架构。
系统采用C/S架构,分为客户端和服务端两部分。
客户端负责用户界面和交互操作,服务端负责数据处理和模型运算。
系统采用模块化设计,便于后期维护和扩展。
3. 关键技术(1)Unity引擎:Unity是一款强大的游戏引擎,具有出色的三维图形处理能力和物理引擎,能够满足我们开发仿真系统的需求。
(2)三维建模技术:采用3DMax等建模软件进行场景和飞行器的建模,确保模型的真实性和精度。
(3)物理引擎:使用Unity自带的物理引擎进行飞行器的物理模拟,使飞行器在模拟环境中的运动更加真实。
(4)网络通信技术:采用TCP/IP协议进行客户端与服务器之间的数据传输,确保系统的实时性和稳定性。
三、系统实现1. 场景建模与飞行器建模我们使用3DMax等建模软件进行场景和飞行器的建模。
在建模过程中,我们充分考虑了真实性和精度,确保模型能够真实地反映出救援环境的实际情况。
同时,我们还对飞行器的各项性能参数进行了详细的设定,以确保仿真系统的准确性。
基于三维混合定位的车载水下应急救生装置
2023年 / 第11期 物联网技术170 引 言众所周知,我国是一个汽车大国。
据公安部统计,截至2022年6月底,我国机动车保有量达到4.06亿辆,其中汽车有3.1亿辆,可见我国汽车数量庞大,发生意外事故的可能性也会大大提高[1]。
“7.20”河南特大洪涝灾害期间,郑州仅京广快速路北段隧道,就有247辆车拥堵被淹,遇难人数6人。
2012年7月21日,北京暴雨如注,这场暴雨导致了全城交通处于瘫痪状态,最后共有37人不幸遇难[2]。
2013年 8月30日,深圳下了一场大暴雨,一司机经过涵洞时,涵洞中的积水迅速上升,司机受困于车中无法逃脱,最后不幸溺亡[3]。
《中国统计年鉴》显示,2017—2019年,中国交通事故年均发生数23.19万次,交通事故年均死亡人数6.3万人, 其中汽车涉水事故的死亡率最高。
据不完全统计,我国平均每年汽车落水事件达300余起,车内驾乘人员获救者不足10%。
这些数据和事件表明,有一款合适且工作性能稳定的水下救生装置是多么的重要,它可以在危急时刻挽救多少人的生命。
根据专家统计和专业人士水下实验,以及汽车涉水后车内获救人员讲述的经验,总结汽车落水造成驾乘人员死亡的主要原因有六种:一是因缺氧而导致的窒息身亡;二是汽车电路断电,水压过大,车门无法打开,无法及时逃生;三是车内没有击碎车玻璃的工具、车玻璃硬度较大难以击碎逃出;四是车玻璃被水压冲击破碎后严重伤人致死;五是汽车坠入水中时产生的冲击直接致人死亡;六是溺水死亡。
针对以上问题,本文提出一种基于三维混合定位的车载水下应急求生装置。
本装置功能丰富,可靠性高,极大地提高了受害者的存活概率。
1 系统整体设计本文设计的基于三维混合定位的车载水下应急救生装置主要由五大模块组成:三维混合定位模块、推力模块、供氧模块、照明模块以及电源模块。
在发生危险时,使用者在汽车头枕支撑杆的一侧,找到一个塑料按键,按下塑料按键后,向上用力将头枕完全拔出,将头枕拿下来后,使用汽车头枕进行破窗;在水中利用推力模块进行运动,推进器采用无刷电机带动螺旋桨作为动力来源;采用人体工学设计让使用者上手舒适;动力大小通过油门拉环调整,采用高品质鱼线材质可以承受较大的拉力,并且可以根据使用者的手掌大小不同调整拉环线的长度,方便使用者调节行进速度,避免不必要的磕碰。
基于NX_的球形曲柄滑块推进仿生机械鱼设计*
Science and Technology & Innovation |科技与创新2024年 第04期DOI :10.15913/ki.kjycx.2024.04.007基于NX的球形曲柄滑块推进仿生机械鱼设计*程明玉,杨小高,刘 霆,颜欣可,祝文杰(湖南文理学院,湖南 常德 415000)摘 要:近年来,人们为利用水资源进行了不断探索。
通过对鱼体外形和运动模式的研究,设计了以球形曲柄滑块机构为动力输出、单片机为控制核心元件的仿生机械鱼。
采用传感器进行主要数据采集,配置直观图像输出和处理功能,同时观测温度、污浊度等水质参数对水下情况进行数据收集,整个系统可实现水下环境的检测和生物生存状况的观测。
关键词:仿生机械鱼;球形曲柄滑块;控制系统;结构简化中图分类号:TP242 文献标志码:A 文章编号:2095-6835(2024)04-0031-03——————————————————————————*[基金项目]省级大学生创新创业训练计划项目“新工科背景下《机械设计课程设计》创新思政教学改革与实践”(编号:HNJG-2021-0824、校JGZD2122)、“‘互联网+’背景下统计学课程融入创新创业训练的教学改革研究与实践”(编号:HNJG-2022-1235)、“智能水质与鱼群监测仿生鱼”(编号:S202210549021)近年来,随着环境污染加剧,长江黄河流域的水质也受到一定影响,水下生物的生活环境逐渐恶劣,一些物种甚至濒临灭绝。
为了实现可持续发展,保护水资源刻不容缓。
国内外学者研究了仿生智能机械鱼的应用,并在推进机理和应用方面取得了一定的应用成果。
学者们参考二自由度胸鳍仿生鱼[1]设计了基于球形曲柄滑块机构推进的智能水质与鱼群监测仿生鱼,采用仿生学原理使其外观更接近真实鱼类,其体积相对一般水下机器较小,运动灵活性更高,能耗低,供电元件密封,续航能力强,能够实现通信。
而内部的探测传感系统能够检测水质,例如水中污染物、温度等,能够在水下实现探测、水环境检测等功能,从而减少人工下潜探测的需要。
航空救生试验仿真系统的设计与实现
收稿日期:2004-06-04 第21卷 第9期计 算 机 仿 真2004年9月 文章编号:1006-9348(2004)09-0037-03航空救生试验仿真系统的设计与实现杨爱民1,张文祥1,王新辉2(1.浙江万里学院,浙江宁波315008;2.北京通信技术研究所,北京100085)摘要:由于存在大量不确定型因素,使得建立在纯数学模型基础上的航空救生试验仿真存在很大局限性。
文章首先通过对航空救生试验仿真系统的分析,提出了一种基于演绎型数学仿真和归纳型数学仿真相结合的混合型的数学仿真方法。
然后,在分析混合型的数学仿真关键技术基础上,文章提出了实现方案、实现步骤,并建立了一个初步原型;最后通过对原型仿真系统的仿真结果的统计分析,证明该方法的有效性。
关键词:航空救生;仿真试验;数学仿真中图分类号:TP391.9 文献标识码:ADesign and Implementation of Aviation EjectionExperimentation Simulation SystemY ANG Ai -min 1,ZHANG Wen -xiang 1,WANG X in -hui 2(1.Zhejiang Wanli University ,ZheJiang Ningbo 315008,China ;2.Beijing C ommunication T echnology Institute ,Beijing 100085,China )ABSTRACT :Because of existing a large number uncertainty factors ,aviation ejection experimentation simulation system based on pure math m odels has many limitations.The paper firstly analyzes aviation ejection experimentation simulation sys 2tem and presents an com posite math simulation methods based on deduction math simulation and induction math simulation.Then after analyzing critical technology of the com posite math simulation method ,the paper puts forward an im plementation scheme and steps and sets up a prototype.At last ,by analyzing the simulation results ,the method ’s validity is proved.KE YWOR DS :Aviation ejection ;S imulation experimentation ;Math simulation1 研究背景航空救生装备是在飞机飞行包线极限区域内为飞行员创造安全舒适的飞行环境、保证飞行作战效能的发挥,并在飞机失控的情况下使飞行员安全逃逸的装置。
微小型救援机械手的正、逆运动学仿真分析
微小型救援机械手的正、逆运动学仿真分析邢天羿;刘春明;张邦成;谭海东【摘要】应用D‐H (Denavit‐Hartenberg )法建立了微小型救援机械手的D‐H 坐标系,应用Matlab/Robotics建立其三维仿真模型进行正运动学和逆运动学仿真。
结果表明,运动过程中,微小型救援机械手的速度和加速度没有突变,能够准确、平稳地完成指定任务。
%D‐H coordinate system of a miniature rescue manipulator is established with D‐H(Denavit‐Hartenberg) method ,and the 3D model of the manipulator is built in MATLAB/Robotics for both the forward and inverse kinematics simulation .The results show that no sharp changes in velocity and acceleration ,so the manipulator can move and stop smoothly with high precision .【期刊名称】《长春工业大学学报(自然科学版)》【年(卷),期】2015(000)001【总页数】6页(P11-16)【关键词】救援机械手;D-H法;运动学【作者】邢天羿;刘春明;张邦成;谭海东【作者单位】长春工业大学机电工程学院,吉林长春 130012;吉林石化公司合成树脂厂,吉林吉林 132000;长春工业大学机电工程学院,吉林长春 130012;长春工业大学机电工程学院,吉林长春 130012【正文语种】中文【中图分类】TP272普通机器人由于空间受限等原因不能完成某些救援任务,微小型救援机器人就是为了完成这些任务而研制的特种机器人[1-2]。
Robocup救援仿真PPT
代理人 代理人模组控制具有智慧的个体,这些个体能够根据所处的环境自行决定他们 的动作,在RobcupRescue模拟系统当中,代理人是系统的客户端 (client) 程式, 而核心是伺服端 (server) 程式,会检查代理人的动作.例如,一个消防队代理人决 定要去灭火,但是可能存在一些因素使得代理人无法进行灭火的动作.此外在系 统 当中,一个代理人所代表的是一的单位而不是一个真正的实体,也就是说在系统 中 如果有一个消防队代理人,实际上所表示的是一组消防队员.这个系统会这麼做 的 原因是为了不让整个模拟系统太过庞大,但是未来在系统当中将会把一个代理人 表 示成一个真正的人或机器人.
二.服务器安装 09年比赛的服务器版本是0.49plus。从网上下载服务器包,置于 home/rescue目录下。解压之后进入安装包目录(既0.49plus文件夹) 下的programs目录。在命令窗口下输入make命令,它会根据当前目录 下的makefile文件编译服务器。若没有错误就安装成功了。 即命令符: $cd rescue/0.49plus/program $make 三. 服务器运行 进入0.49plus/boot目录下,命令行下输入./all.sh VC 启动服务器。 我们会看到一个可视化的灾区环境。接下来上一下平台自带的智能体 。接着输入./sampleagent.sh。启动智能体后你会看到整个灾区的救援 情况。 命令: $cd rescue/0.49plus/boot $./all.sh VC(vc为一地图名) $./sampleagent.sh
5. 核心整合从模拟器的结果,并且将这些广播到地理资讯 系统和模拟器,同样地 核心也是会在一定的时限之内接收这些结果,然后核心会 将模拟世界的时间增 加,并且提醒观察器更新. 6. 观察器对地理资讯系统提出有关这个是世界的更新资 讯,并且将这些资讯以视 觉化的方式显现出来. 7. 地理资讯系统维持模拟结果的追踪,并且将工程构建和运行
基于unity3d的挖掘机抢险救灾全景模拟训练平台设计
Equipment Manufacturing Technology No.10,2019抢险救灾是武警部队的重要职能任务之一,挖掘机操作在执行任务中发挥了巨大的作用,为了提高执行任务的能力,减少执行任务中的伤亡,武警部队官兵需要经常性开展抢险救灾模拟演练。
但是在挖掘机的抢险救灾模拟演练中存在以下问题:受实际训练场地、时间及气候等因素影响较大,训练效率低;在训练时对挖掘机的损伤大,影响挖掘机的整体性能和使用寿命,对机手和教练的安全带来风险;油耗较大,成本高,培训周期长[1,2,3]。
针对挖掘机操作训练中存在的上述问题,本文基于Unity3D技术,设计并开发了某型挖掘机抢险救灾全景模拟训练平台。
该平台以部队列装使用的某型挖掘机为原型,系统集成了理论教学、理论考试、实操练习、实操考核四个模块,可以实现“从入门到精通”的学习训练效果。
该平台的开发成功,为该型挖掘机的教学训练提供了一种新的有效手段[4,5]。
1需求分析该平台是为了满足武警部队挖掘机培训教学需要而开发的,为了保证训练的权威性和训练质量,提高训练的安全性、经济性,拟定以下设计要求:(1)人机界面友好,可靠性高,便于操作。
(2)训练科目丰富、仿真度高,具有基础驾驶、挖斗练习、抢险救灾等功能,能够满足部队训练教学需求。
(3)能够实现全景视角和驾驶室视角的切换。
(4)能模拟铲斗在挖掘过程中土壤表面的变化、卸土时土壤的洒落过程、土壤溢出装土车外过程。
(5)具有碰撞检测功能,发现错误操作及时给出警告。
(6)系统造价低,易于部队装备[1]。
2总体构成模拟训练平台主要由操控平台、软件平台、显示输出平台三大部分组成。
操控平台按照某型挖掘机驾驶室1∶1制作,操作手柄、踏板、座椅等均与真实挖掘机完全一致,有利于提高训练的真实性。
软件平台由模拟训练软件和软硬件运行环境组成。
模拟训练软件包括理论教学、理论考试、实操练习、实操考核四大模块。
软硬件环境是指运行模拟训练软件必需的电脑硬件、操作系统等。
救援仿真机器人介绍PPT教案
绿消块防—队—,避警难察所 ,医疗队 矩绿黑就3将中种形点点是市,智颜颜—需民就色色—能要变变市放可体开化化民入以。发已——避保死——者难证亡着受控所市火伤制程程的度度 黑民叉永—远—路不障受伤害。
第5页/共14页
城市地图
第6页/共14页
运行环境
第7页/共14页
运行环境
• 单机调试 • 不可线程间共享变量 • 不可写文件共享信息
• 比赛环境 • 1台服务器 • 3台Agent运行机器 • 任意台Viewer机器
第8页/共14页
阅读材料
• RCRSS系统手册
☆☆☆☆☆
第9页/共14页
谢谢大家!
第10页/共14页第2页/共14页 Nhomakorabea援系统结构
救援仿真系统是一个 由多个模块通过网络进 行连接的实时的分布式 仿真系统(如图 所示)。 每个模块可以独立的运 行在不同的计算机上, 所以仿真系统的计算任 务就可以分布到多台计 算机上。
第3页/共14页
第4页/共14页
系统运行图解
最上方: Time——仿真周期
每Sc场or比e—赛—的比仿赛分真数周期为 3界主灰白0色色中体0,矩线部的形条一分一——:个——秒周建道钟筑路期物是现实世
第1页/共14页
研究目的
• RoboCupRescue 机器人救援仿真 是一个通过模拟现实生活中的城市灾 难场景,用机器人进行救援的仿真系 统。RCRSS(Robocup Rescue Simulation System)
• 使救援Agent(智能体/机器人)进行 有效的分工协作,完成营救市民和灭 火的任务,以最大限度地减小灾难带 来的损失,进而在灾难救援这个重大 的社会问题上促进研究和发展
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人的体重为100kg,施加在绳轮上的主动力矩为T=GD/2=
981x53/2=25996.5N/ram,摩擦阻力矩为/’=-5901.2N/ram。
当人开始下降时,先做一段加速运动,这时绳轮转速逐渐增
加,由机构传动原理得到摩擦块所产生的离心力也逐渐增加。为
了施加摩擦块的等效离心力,需要计算摩擦块的质心坐标,其坐
Scenario模型由大凄略嘣阱场吐象组成,包括连忏凌豸幅Ⅱ、弹簧稀嘴。
连杆是指机构中所有的运动零件。因为所有的运动零件必须 和连杆相关,所以有—个连杆必须与地固定,不能移动。在本文中 将主轴和内齿圈与地固定,建立了8个连杆。
运动副可以手工建立也可利用主模型中定义的配对条件自 动创建。根据建立的8个连杆的运动关系,建立了4个旋转副、2 个滑动副和2个固定副。
吊 +I/
和 \
\·
纠且 /
沙 T U
出
图1缓降器结构原理图
★来稿日期:2008-02—15
JLJ¨—奠^叠—●一羹—叠—生—奠—生—叠—奠—叠—奠^奠^生^羹—生.生—奠—’—●—奠—叠—叠—壹—羹一●一●—●一●—鱼—奠—●一、奠^叠^叠^奠^叠—奠^盘^奠^奠—奠^奠^生^奠—生—吏—生—叠—奠—奠—lL
0.04
0.06
0.08
时问如
o.10
o-12
图4内齿圈、行星轮和太阳轮之间啮合力曲线图
3.1绳轮及太阳轮角速度分析
如图5所示,在人的重力作用下,绳轮和太阳轮角速度在很
短的时间内迅速增加,达到平稳状态;绳轮和太阳轮的平均转速
比为0.235,传动比误差为:
I(0.228-0.235)/0.2281=3.07%<4%
满足行星齿轮传动系统的传动比要求;输出角速度有微小波
动,波幅变化不大,并且当进人平稳传动阶段时,Az-2物体的平均下
降速度为0.89rids,标准规定下降速度在1.5m以内,满足设计要求。
~1.oE+04
孕8.0E+03 薯6.0E+03
l
魁4.0E+03
}吼
型2.0E+03 I,r一.
‘
Байду номын сангаас曩0.oE+00
4实验结果与仿真数据对比
通过样机在20次不同载荷作用下的下降实验,得到下降速度 随负荷力的增大而增大的规律曲线图,以此来分析缓降器结构设计 和优化结果是否满足设计要求,同时验证基于虚拟样机的仿真分析 是否准确。如表l所示,列出了其中9次实睑与虚拟晓彭杉鼬镁《据。
关键词:摩擦阻尼;救生缓降器;仿真研究;UG
【Abstract】Introduces to principle of descent rescue device on frietiond如唧坛Establishing∥扣
tual prototyping based On UG/Motion of NGW planetary gear machinery.A nalyzed dynamics characteristic to this kind of descem re¥Cll孵device in running,Discussed parameter interrelation including veloc渺,0c— celeration and torque about descent Fe¥Cll孵device.the numerical value analysis result proves model is rep
进产品,这就大大缩短了设计周期,减少了设计开发费用,具有较
仿真,2005(7)
万方数据
第12期
王智明等:基于UG/Motion的救生缓降器仿真研究
71
2虚拟样机模型建立及仿真参数的确定
2.1虚拟样机模型的建立 UC4 Motion运动机构模块提供机构设计、分析、仿真和文档生
成功能,通过分析可得到系统的动力学特性,为设计和分析提供准 确的数据。在UG分析模块中,Scenario模型是基于主模型在各种 不同条件下对机构进行分析计算并且与主模型相关联的模型。
sonable through contrast On testing data.
Key words:Frictional dam#ng;Descent rescue device;Simulation study;UG
中图分类号:THl6。TP391.9文献标识码:A
上々l商 救生缓降器为高楼逃生设备,恒安电子机械公司的缓降器为
图2动力学仿真模型
}=者±丢护F争cosc妇眦’;P2=妒t
—1。:』坐己+上色左
E
El
E2
式中:x一刚度系数,N/mmLS;p—综合曲率半径,mm;“+竹-崭啮
合;“一”一内啮合;F—综合弹性模量,MPa;Pl沪广书点处
小、大齿轮齿廓的曲率半径,nun;a—分度圆压力角,o;∥一 节圆压力角,mm;d。—小齿轮分度圆直径,mm;u—传动比; p.—小齿轮的泊松比;触—大齿轮的泊松比;晶—小齿轮的 弹性模量,MPa;易—大齿轮的弹性模量,MPa。 计算得内、外齿轮啮合力仿真刚度系数分别为4.15xl&N/
(3Jilin Heng’an Electron Machinery Co.Ltd.,Changchun 1 30052,China)
【摘要】介绍了摩擦阻尼型救生缓降器的工作原理,建立了基于UG/Motion的NGW型行星齿轮 传动系统的虚拟样机,研究了样机仿真分析参数的确定方法,分析了该救生缓降器的动力学特性,得出了 速度、加速度及转矩的关系,比较了仿真分析结果与试验数据,结果表明样机模型是正确的。
接触力和载荷利用UG中提供的各种工具和函数,根据缓降 器的运动原理,分别施加各部件运动约束及运动控制,以模拟虚 拟样机各连杆之间的相对运动以及力学关系。本研究主要是实现 运动传递和齿轮之间的啮合计算,因此用接触力代替齿轮副来实 现齿轮之间的运动和力的传递。
利用UG/Motion模块建立了救生缓降器的虚拟样机,并对其 进行了动力学分析,动力学仿真模型,如图2所示。计算简图,如 图3所示。
匀速下降26.0N/m。
’
葶 餐 凄
12 时间t/s
图6绳轮及太阳轮的角加速度曲线图
3.3主动力矩及摩擦阻力矩分析
如图7所示,绳轮所受的主动力矩为一个恒量,由人或物体 所受的重力产生,大小为26.0N/m。
主动力矩
Ⅲ.W,裂辛睾
—1…—爵I'n一|t/s k呼谨船矩0D4
n.06
o‘08
olo 一
0-1 2
(3吉林恒安电子机械公司,长春130052) Simulation study based 013 UG/motion for descent rescue device
WANG Zhi-mingm,WANG Guo-qiangj,LI Jing-hai3 (1Institute of Mechanical Science and Engineering of Jilin University,Changchun 1 30025,China) (ZR&D Center-China OiLfield Services Limited,Mechanical&Electrical Equipment Institute,Beijing 101149,China)
参考文献
l王国强等.虚拟样机技术及其在ADAMS上的实践EM2.西安:西北工业大 学出版社,2003(3)
2何德誉.曲柄压力机[M].北京:机械工业出版社。1982(6)
3吴艳荣等.基于ADAMS的变胞机构动力学仿真[J].机械设计与制造,
2007(5)
性能,可以完成物理样机无法完成的无数次的仿真试验,进而改 4罗阿妮,张家泰,刘贺平.利用adams仿真分析五自由度机械手[J].计算机
万方数据
No.12
72
机械设计与制造
Dec.2008
。~●..I.. \』^.^..J-|I一..k一. ^..
,Y。 y1’
Y一
"
基
j
J
农
¨^、 .]n 、 1 、n n n n, 、 、n n n
麓 f”’Ⅶ’7” F77y。。w’”’rv。’一””
辎
打星轮±与太目斑行星轮I与太阳轮
0.00
0.02
是啮合力研究的关键,齿轮工作过程中齿廓啮合点的位置是变化 的,由于各个啮合点的曲率半径随着节点啮合处的曲率半径上下 波动,因此应以节点啮合处作为计算点,推导刚度系数计算公式。
K-扩E
式中:m—摩擦块的质量,kg;m—太阳轮的角速度,rad/s;多—摩 擦块的质心Y坐标值,lllln。
3缓降器的动力学仿真及结果分析
.’’
:~ i
0.00
0.02
0.04
O.06
0.08
0.10
0.12
时间如
图5绳轮及太阳轮的角速度曲线图
3.2绳轮及太阳轮角加速度分析
如图6所示,输出角加速度与角速度同样有微小波动,波幅
变化不大,这是由装配间隙和在负荷力作用下产生的冲击引起
的,当角加速度减为零的时候,系统达到平稳状态,这时人就开始
标(;,多,三)可由式(4)确定: i卸
芦}』肛}恤』》
㈤
;专
式中:A—摩擦块纵向截面面积,mill2;^—摩擦块厚度,mill。
经计算得摩擦块质心坐标为x=O,扣-52.4,z=4.25。
摩擦块转动时,其等效离心力大小为
艮l晌面予
(5)
图3摩擦块简图
2.2仿真分析参数的确定 渐开线齿轮啮合力仿真刚度系数与零件的材料和形状有关,
动力学仿真分析是假定人为100kg。仿真时间为0.1s,步数 为50,内外齿轮的接触刚度系数分别为4.15x105N/mm岱,1.65x 105N/mmLs,静摩擦因数为0.5,动摩擦因数为0.4。