船舶监控系统中GPS定位功能的设计与开发
船舶自动化控制系统的设计与实现

船舶自动化控制系统的设计与实现一、引言随着社会的不断发展,航运行业也在不断创新进步。
近年来,船舶自动化控制系统的设计与实现越来越受到重视。
船舶自动化控制系统是指利用计算机技术、自动化控制技术、通讯技术等现代科技手段,对船舶的机电设备、能源、信息等各方面进行智能化控制,从而提高船舶的安全性和运行效率。
本文将对船舶自动化控制系统的设计与实现进行详细介绍。
二、船舶自动化控制系统的基本组成船舶自动化控制系统包括以下几个部分:2.1 航行控制系统航行控制系统是船舶自动化控制系统最基础的组成部分。
它主要包括自动导航、操纵控制、通讯导航、危险警报、远程监控等功能。
其中,自动导航系统使用全球定位系统(GPS)技术,实现对船舶在海上的船位、速度、方向等数据的监测和控制。
操纵控制系统则使用计算机控制技术,通过船舶电子控制系统对发动机和舵机进行控制。
通讯导航系统是通讯航行装备中的关键环节,它负责传递船舶的通讯数据和导航数据,以确保船舶的安全性。
危险警报系统可以快速判断船舶是否面临危险,并启动相应的控制程序,避免事故的发生。
远程监控系统可以通过互联网或其他通讯手段,对船舶进行电子监控,保证船舶在海上的安全与稳定。
2.2 电气设备自动化控制系统电气设备自动化控制系统主管船舶的各种电气设备状态监测和控制,包括主机动力控制系统、配电系统、照明、暖通空调和厨房用具等。
其中主机动力控制系统一般采用集中控制模式,使用计算机系统,将车间内各种机电设备通过传感器连接到计算机,实现对发动机、控制系统、流量计等各种设备的检测和控制。
配电系统主要负责船舶的配电控制,以确保每个配电板的用电安全。
照明和暖通空调系统用来维持船员以及载货物的舒适性和安全性,同时还可以通过自动控制,实现节能和环保。
2.3 负载自动化控制系统船舶的负载自动化控制系统包括冷库控制、货物舱盖控制、舱盖门控制等。
其中,冷库控制系统用来监测和调节船舶冷库的温度和湿度,以保证存放在船舶中的货物安全。
gps和ais的工作原理
gps和ais的工作原理GPS(全球定位系统)和AIS(自动识别系统)是现代航海领域中广泛使用的两种定位技术。
它们分别基于卫星和无线电通信,为船舶提供精确的位置和航行信息。
本文将详细介绍GPS和AIS的工作原理。
让我们了解一下GPS的工作原理。
GPS是由一组卫星组成的系统,这些卫星围绕地球轨道运行。
每颗卫星都会向地面发送信号,这些信号包含卫星的位置和时间信息。
GPS接收器通过接收来自多颗卫星的信号,并计算出自身与每颗卫星之间的距离。
通过测量多个卫星的距离,GPS接收器能够确定自身的精确位置。
GPS接收器的工作原理基于三角定位原理。
三角定位原理认为,如果我们知道一个点与三个不同位置的点之间的距离,就可以确定这个点的位置。
在GPS中,卫星就是这些“不同位置的点”,GPS接收器通过测量到多个卫星的距离,然后使用三角定位原理计算出自身的位置。
GPS系统的精确性取决于接收器和卫星之间的精确时间同步。
为了实现精确时间同步,GPS接收器会接收来自卫星的时间信号,并与自身的内部时钟进行比较。
通过对接收到的时间信号进行微调,接收器可以确保自身的时钟与卫星的时钟保持同步,从而提高定位的准确性。
接下来,我们来了解一下AIS的工作原理。
AIS是一种船舶间的无线通信系统,用于实时交换船舶的位置、航速、航向等信息。
AIS 系统由船舶上的发射器和陆地上的接收器组成。
船舶上的AIS发射器会周期性地发送包含船舶信息的信号,而陆地上的AIS接收器则会接收这些信号并将其显示在监控系统上。
AIS的工作原理基于VHF无线电通信技术。
船舶上的AIS发射器会将船舶的位置、航速、航向等信息编码成数字信号,并通过VHF无线电波发送出去。
陆地上的AIS接收器会接收到这些信号,并将其解码成可读的船舶信息。
接收器会将这些信息显示在监控系统上,以便船舶的位置和航行信息能够被其他船只和海岸站点实时获取。
AIS的工作原理还涉及到船舶之间的通信。
当一艘船接收到另一艘船的AIS信号后,它可以通过无线电通信与对方进行交流。
船舶通信系统设计方案
船舶通信系统设计方案I. 简介船舶通信系统是一种关键的技术设备,用于在海上通信、追踪和管理船只。
本文将就船舶通信系统的设计方案进行探讨。
II. 系统架构船舶通信系统的架构应该考虑以下几个关键要素:1. 数据传输:船舶之间的通信需要快速和可靠的数据传输。
因此,我们建议将卫星通信技术与无线局域网技术相结合,以实现高速的数据传输。
2. 船舶追踪:为了实现对船只的有效管理和定位,应该在系统中集成全球卫星定位系统(GPS)和自动识别系统(AIS)。
GPS用于定位船只,AIS用于识别和追踪船只。
3. 紧急救援功能:船舶通信系统应该具备紧急呼叫和求救功能,以确保在紧急情况下能够及时寻求帮助。
这可以通过集成应急按钮和紧急援助电话等功能实现。
4. 数据存储与处理:系统应该具备数据存储和处理的能力,以便对通信记录、船只信息和其他数据进行分析和管理。
III. 主要技术组件为了实现上述的系统架构,我们建议采用以下主要技术组件:1. 卫星通信设备:选择一种可靠的卫星通信设备,确保在海上的通信畅通无阻。
该设备应具备高速数据传输的能力和良好的抗干扰性能。
2. 无线局域网设备:为船舶内部的通信提供无线连接。
通过安装无线网络设备,船员可以方便地在船上的各个区域进行通信和数据共享。
3. 全球卫星定位系统设备:集成GPS设备,以获取船只的准确位置信息。
这有助于提高船只的管理效率和安全性。
4. 自动识别系统设备:集成AIS设备,用于识别和追踪船只。
这有助于实时监控海上交通、避免碰撞和提供船只信息。
5. 紧急呼叫装置:安装紧急呼叫按钮和紧急援助电话等设备,以便在紧急情况下能够及时寻求帮助。
6. 数据存储和处理设备:选择适当的数据存储设备和处理器,以实现对通信记录、船只信息和其他数据的管理和分析。
IV. 系统功能与特点船舶通信系统的设计方案应具备以下功能和特点:1. 高速数据传输:通过卫星通信和无线局域网技术,实现快速、稳定的数据传输,以满足船舶之间的通信需求。
基于GPS技术的船舶定位导航和航迹预测研究

测出船舶的航向、航迹误差,并控制船舶舵角使船舶 调整航线。本文介绍了全球定位系统(GPS)的工作 原理,在此基础上研究了船舶定位导航和航迹预测系 统,对提高船舶航行效率和安全性有一定意义。
1 全球定位系统 GPS 的工作原理及研究现状
1.1 GPS 的组成与功能 全球定位系统(GPS) 是美国在 20 世纪 70 年代研
图 1 全球定位系统(GPS)的星座图 Fig. 1 The constellation of the global positioning system (GPS)
1.2 GPS 的定位原理
GPS 系统的定位卫星分布形式使得地球上每个位 置都可以同时观测到 4 个及以上的卫星,假设地面接 收机的位置 P,到某一卫星的距离为 D0,某卫星的三 维坐标为(X0, Y0, Z0)。不考虑测量距离的误差,可由下 式求解地面坐标:
关键词:GPS;船舶定位;导航;航迹预测
中图分类号:U665.23 文献标识码:A
文章编号: 1672 – 7649(2018)6A – 0178 – 03
doi:10.3404/j.issn.1672 – 7649.2018.6A.060
Research on the navigation and track prediction of ship based on GPS technology
发的一种导航定位系统,具有全天候、全球性、实时 性和连续性的三维导航与定位功能[2]。
全球定位系统(GPS)主要由轨道卫星、地面监 控部分和用户设备 3 个部分组成,其中,全球定位系 统(GPS)的空间星座由 21 颗工作卫星和 3 颗备用卫 星组成,并且分布在 6 个轨道平面中。GPS 卫星轨道 平均高度为 20 200 km,运行周期为 11 h 左右。
工程船舶GPS定位监控系统的关键技术分析

就会不停地接收卫 星信 号并输 出大量 的观 测定位 信息 , 通过 串 行通信传送到微计算机 中, 可根据用 户的需求 任意设 置数据 并 采样间隔 。考虑到本监控系统 的整体开发环境 , 为降低 复杂度 , 本文采 用 MS o 控 件 的事件驱 动通信 方式 , 当有新 字符 C mm 每 到达 、 或端 口状态 改变 、 或发生错误时便触发 On o C mm 事件 。
工程管理 / 13 3
工程船舶 G S定位 监控 系统 的关键技 术分析 P
赵 卫 民
摘 要 : 对 当今 国 内 工程 船 舶 监 控 技 术 缺 口, 以研 究 施 工 过 针 可 程 中的 精 确 定 位 及 准 确 控 制 等 保 证 有 效 地 治 理 航 道 问题 的 关键 技术 , 并将这一技术应 用于航道 治理施工 中, 即利用差分定位技 术 对 工 程 船 舶 进 行 定 位 , 高 了施 工 定 位 的精 度 。 提
关 键 词 : S 定 位 监 控 ; 舶 工 程 GP ; 船
后者为真正 的 R TK 技 术 。
三 、P G S数 据通 讯技 术
() 1 串行通信技术 。串行端 口的功能是作为 C U串行设备 P 间 的 编 码 转 换 器 。当 数 据 从 C U 经过 串行 端 口发送 出去 时 , P 字 节数据转换为串行 的位。 。一 般 的 G S都 有 串行 通信 口, 设 P 本 计使 用 R 一2 2 s 3 一c通 信接 口标准 , 采用 异步 串行方 式进行 数 据传输 , 通过编 写相 应 的串 口通 信程 序来 实 现 G S接 收机 与 P P C机之间的数据通 信。 ( ) P 2 G S数 据报 文 分析 。系统设 计 需 要掌握 的信息 是经纬 度 、 经纬 度方 向 、 P G S定 位状 态和 接收 信 号 的 时 间 。在 提 取 出 的 G S语 句 中 , 通 过 找 寻 经 纬 度 所 在 的 P 可 逗 号 位 置 的方 法 , 出 经 纬 度 坐 标 , 将 经 纬度 坐标 进 行 度 数 的 读 再 转换 。( ) 据通讯模 块设计 。GP 3数 S接 收机 只要处 于工 作状态
船舶安全监测与预警系统设计与实现

船舶安全监测与预警系统设计与实现船舶安全一向是船运业中重要而值得重视的一个议题,因为不仅仅涉及到货物的安全,也涉及到人类的生命安全。
然而,随着技术的发展和科学的进步,船舶安全监测与预警系统也随之出现并得到了广泛的应用。
本文将会介绍船舶安全监测与预警系统设计与实现的相关知识。
一、船舶安全监测系统功能和应用船舶安全监测系统是由多个传感器组成的系统,包括温度和湿度传感器、震动和压力传感器等。
这些传感器的作用是在不同环境中监测船舶的物理状态和运行状态,以便在发生故障或异常情况时及时发出警报。
例如,在海上运输货物时,如果某个集装箱燃烧起火,系统中的温度传感器会检测到异常温度并立即发出警报,防止火劫。
船舶安全监测系统的主要应用是监控船舶下沉、失稳和结构受损等情况。
此外,它也可以监测船舶上的设备,例如引擎、发电机等的故障和损坏情况。
如果出现任何问题,系统会自动发送警报,以便船员可以及时采取行动或联系海岸警卫队等相关单位。
二、船舶安全预警系统的设计船舶安全预警系统是通过互联网来监测船舶所处的环境,将信息传输到服务中心,并进行数据处理和分析以便提供预警信息。
预警系统通常包括了星载定位、雷达、气象观测和海况探测等监测设备。
首先,对于船舶上的设备,系统要求能够实时显示电力、燃料、水等的使用情况,让船员对每个设备进行全面了解。
其次,系统还需要配备智能监测摄像头,以便在出现事故情况时可以及时采取相应措施。
最后,系统还要配备高精度和高可靠的GPS定位系统和通讯系统,以便在不同环境和地理位置下快速响应船只紧急情况。
三、船舶安全专业技术人员的培养由于船舶安全预警系统设计和管理需要专业知识和技能,因此需要有一批具备相关知识和技术的专业人士来负责船舶安全预警系统的运维和管理。
相关领域的专家和研究人员也要参与到系统设计中来,以便在解决关键技术、提高系统可靠性和减少运维成本等方面提供帮助。
在技术人员的培养上,大学教育和科研机构起着至关重要的作用。
【豆丁-精品】-船舶上排自动定位系统应用研究

我国船舶上排定位现状及研究的可行性目前,在我国船舶修造船行业,船舶上排(台)大致有五种方式:一是利用船厂就近的自然平缓滩涂简易上排方式;二是修建标准的横向或纵向滑道排车并链接轨道车上排方式;三是专用橡胶气囊上排方式;四是专门修建的干(湿)船坞上排方式;五是滑道排车出水后再用专用轨道小车接应上排方式。
岸上起重随船轨道车的形式一般为纵拉式、横拉式、提升式等。
无类采用何种方式都是根据船体线型图在轨道车上布墩放样后,再用岸上动力设备将船舶起出水面,进行上排(台)作业过程。
随着相关专业的技术发展,解决这一问题的计算机控制、传感器、液压系统及无线通信技术日益成熟,计算机控制的可靠性不断提高,多种复杂、精确、大功率的液压及电动控制设备已广泛应用于国防和工农业生产各个领域,采用电磁传感及控制技术来实现船舶上排自动定位,已成为现实。
定位系统研究吸收“船艇上排定位监测装置”成功经验,针对修造船行业的基层专业技术人员,构件满足国家有关标准要求,通用性强,力求实用、简单、方便、可靠。
定位系统研究的主要内容定位系统利用计算机测控和通讯技术,通过定位传感器检测船舶在随船轨道车上的位置状态,根据需要控制随船轨道车上液压支撑臂的开合,自动锁定水下轨道车上的船舶,实现上排船舶的自动定位,然后通过岸上起重机将上排船只拖出水面至适当位置。
系统分“岸上控制台”和“液压随船轨道车及其控制系统”两部分。
操作人员通过操作岸上控制台的工业控制计算机,实现对整个船舶上排定位过程的全自动监测与控制,并且通过人机交互界面和远程无线数据传输,实时观察船舶上排定位过程中的各个状态信息和数据。
“岸上控制台”包括岸上控制站、下位机控制、随船轨道车体和随船轨道车上的液压系统等四部分。
其中控制系统分为由岸上控制站和随船轨道车上的现场总线控制系统;随船轨道车车体和随船轨道车上的液压系统构成的执行机构。
控制系统部分结构图定位系统设计成4台随船轨道车(可根据需要串接),液压驱动,无线控制方案,动力由岸上交流提供。
GPS在海上航标监控系统中的应用研究
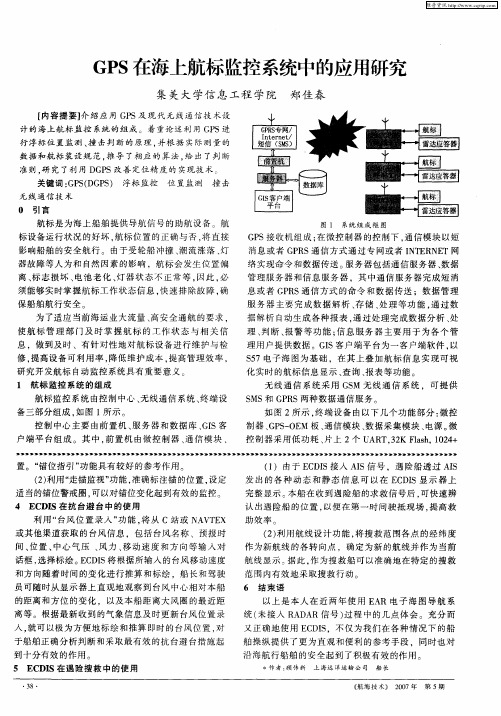
研 究开 发航标 自动 监控 系统具 有重要 意 义 。 1 航标 监控 系统 的组成 航标监 控 系统 由控 制 中心 、 无线 通信 系统 、 端设 终
户 端平 台 组成 。其 中 , 置机 由微 控 制 器 、 前 通信 模 块 、
置 。“ 位指 引 ” 能具有 较好 的参考 作用 。 锚 功 () 2 利用 “ 走锚监 视 ” 能 , 功 准确 标注锚 的位置 , 设定
( ) 由于 E D S接入 A S信 号 ,遇 险船 透过 A S 1 C I I I
息 或者 G R P S通信 方式 的命 令 和 数据 传 送 ;数据 管 理
须能够 实时掌 握 航标 工作 状态 信息 , 速排 除故 障 , 快 确
保 船舶 航行安 全 。
服 务器 主要 完成 数 据解 析 、 储 、 理 等 功 能 , 过 数 存 处 通
据解 析 自动生 成各 种报 表 , 通过 处理 完成 数 据分 析 、 处
数据和航 标装 设规 范 . 导 了相 应 的算 法 . 出 了判 断 推 给
准 则 。 究 了利 用 D P 研 G S改善 定 位 精 度 的 实现 技 术
关键词 : P ( G S 浮标 监控 G SD P )
无 线 通 信 技 术
位 置监 测 撞 击
0 引 言
航标 是 为海 上船 舶提 供导 航信 号 的助航 设备 。航
维普资讯
G S P 在海上航标监控 系统中的应用研究
集 美 大 学信 息工 程 学 院 郑 佳春
基于GPRS的船载远程监控终端设计
[ ]Vi seIcVS 8 2 aahe[ ] ww vtse cr. 1 t s . C 2 8dts etOL . w. i s.o e n - e n [ ]李 榈 宇 , 家 玮 . S I 线 实 现 D P和 MC 之 间 的 高 速 2 杨 用 P 总 S U
的 应 用 [] 微 计 算 机 信 息 ,0 6 2 ( 4 : 0 J. 2 0 ,2 1 )8—1. [ ]陈 伟 , 会 衡 , 秋元 , P 6 刘 黄 E ON 突 发 式 光 信 号 产 生 及 测 试 系 统
所示 。
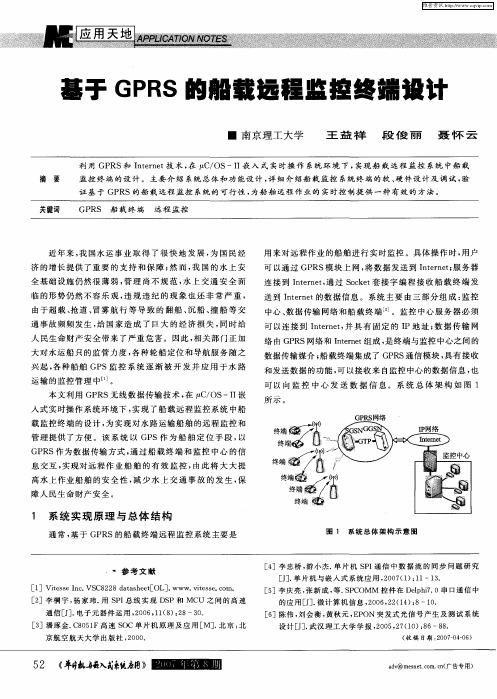
本文利用 G R P S无 线 数 据 传 输 技 术 ,  ̄ / S— I 在 C O I嵌 入 式 实 时 操 作 系 统 环 境 下 , 现 了船 载 远 程 监 控 系 统 中船 实 载 监 控 终 端 的 设 计 , 实 现 对 水 路 运 输 船 舶 的 远 程 监 控 和 为 管 理 提 供 了方 便 。该 系 统 以 G S作 为 船 舶 定 位 手 段 , P 以
关键词 GP RS 船 载终 端 远 程 监控
近 年 来 , 国水 运 事 业 取 得 了很 快 地 发 展 , 国 民 经 我 为
用来对远程作业 的船舶进 行实时监控 。具体操作时 , 用户
可 以通 过 GP RS模 块 上 网 , 数 据 发 送 到 I tr e ; 务 器 将 n en t服 连 接 到 Itr e , 过 S c e 套 接 字 编 程 接 收 船 载 终 端 发 n en t通 ok t
济 的 增 长 提 供 了 重 要 的 支 持 和 保 障 ; 而 , 国 的 水 上 安 然 我
全 基 础 设 施 仍 然 很 薄 弱 , 理 尚不 规 范 , 上 交 通 安 全 面 管 水
船舶GPS监控系统
GPS/GPRS(CDMA1X) 水上交通管理监控系统解决方案武汉长江通信产业集团股份有限公司2007年1月目录1. 系统概述 (3)1.1 前言 (3)1.2 系统目标 (3)2. 系统总体设计 (4)2.1 系统设计思想 (4)2.2 系统结构 (5)2.2.1 系统的拓朴结构 (5)2.2.2 系统的逻辑结构 (7)3. 系统服务 (8)3.1 水上安全监控 (8)3.2 电子助航 (8)3.3 船舶定位和调度 (9)4. 系统功能 (9)4.1实时定位监控跟踪 (9)4.2节点设置管理 (10)4.3电子栅栏设置管理 (10)4.4船舶历史轨迹回放相关管理 (10)4.5 作权限管理 (11)4.6船载终端IP地址远程更新 (12)4.7数据保存补报 (12)4.8客户分控中心支持因特网远程下载 (12)4.9数据保存功能 (12)4.19应急(应劫)报警 (12)4.11越、入电子栅栏报警 (13)4.12超速报警 (13)4.13里程统计 (13)4.14超时停舶报警 (13)4.15远程参数设置 (14)4.16查询统计 (15)4.17船舶资料管理 (15)4.18船员资料管理 (15)4.19客户资料管理 (16)4.20软件系统预留对接接口 (16)4.21支持外接摄像头 (16)4.22支持与船舶其它接口连接 (16)4.23WEB子系统 (16)5. 终端简介 (18)1. 系统概述1.1 前言水上交通管理监控系统不仅将促进水上安全管理和水运行业管理水平跃升到一个新的台阶;同时,通过将先进的综合信息管理网络资源、安全监察管理资源向行业市场开放,进一步向市场提供服务功能,将对扶持水运行业企业提高市场竞争力发挥重要的积极作用。
通过对综合信息化管理系统、先进设备的研发及应用,不仅为水路运输业奠定了良好的发展基础;同时,也对提高中国水路运输整体信息化应用水平作出了贡献。
1.2 系统目标系统定位是一个基于现代卫星定位和无线数据通信技术的、开放的、面向多用户、多种应用的水上安全动态监控及预警综合服务平台,是针对水上安全管理的现状和特点,利用GPS 卫星定位技术、GPRS(CDMA1X)移动通信技术和GIS 地理信息系统技术等高新技术建立的水上安全管理监控平台。
基于GPRS/GPS的海上移动目标监测系统设计
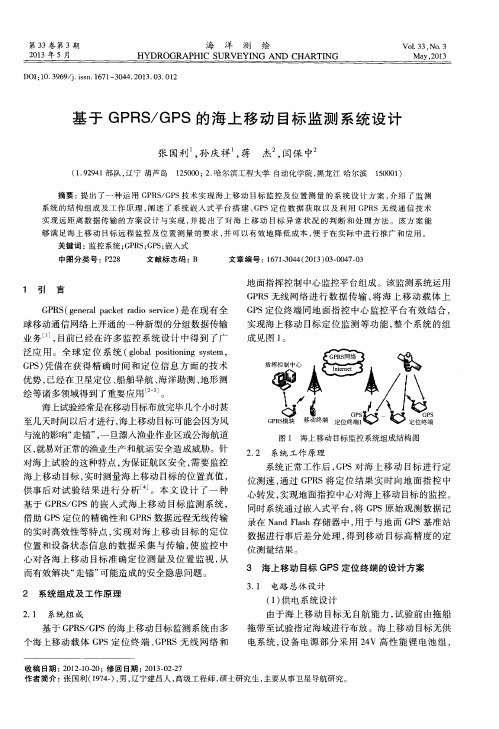
实 现远 距离 数据 传输 的方 案设 计 与实 现 , 并 提 出 了对 海 上移 动 目标 异 常状 况 的 判 断和 处 理 方法 。该 方 案 能 够 满足 海上 移动 目标 远程 监控 及位 置测 量 的要求 , 并 可 以有效 地降低 成 本 , 便 于在 实际 中进行 推广 和应 用 。
优势 , 已经在 卫 星定位 、 船 舶导航 、 海 洋勘 测 、 地 形测
绘 等诸 多领 域得 到 了重要 应用
。
海上试验经常是在移 动 目标 布放完 毕几个小时甚 至几 天 时间 以后 才进行 , 海上 移动 目标 可能会 因为风 与流 的影响 “ 走锚 ” , 一旦 漂入渔业 作业 区或公海 航道 区, 就易对 正常的渔业 生产 和航运 安 全造成 威胁 。针
海
洋
测
绘
第3 3卷
它具 有可靠 性 高 , 寿命 长 等 优 点 , 可 以满 足 A R M9 、
录在 N a n d F l a s h存储 器 中 , 用于与地面 G P S基 准 站 数 据进 行事后 差 分处 理 , 得 到移 动 目标 高精 度 的定
位测 量 结果 。
借助 G P S 定位的精确性和 G P R S 数据远程无线传输 的实 时高效 性 等特 点 , 实 现 对 海 上 移动 目标 的定 位
基 于 GP R S / GP S的 海 上移 动 目标 监 测 系统 设 计
张 国利 , 孙 庆祥 , 蒋 杰 , 闫保 中
( 1 . 9 2 9 4 1部队 , 辽宁 葫芦 岛 1 2 5 0 0 0 ; 2 . 哈尔滨工程大学 自动化学院 , 黑龙江 哈尔滨 1 5 0 0 0 1 )
第3 3卷 第 3期
船舶动态监控系统的开发
t h iu sapidt t eo dr ee p e t f I go r hcif m t nss m)b Bt l e nq e p l escn a dvl m n o S( ega i no ai yt c e oh y o G p r o e yV o o
1 支持
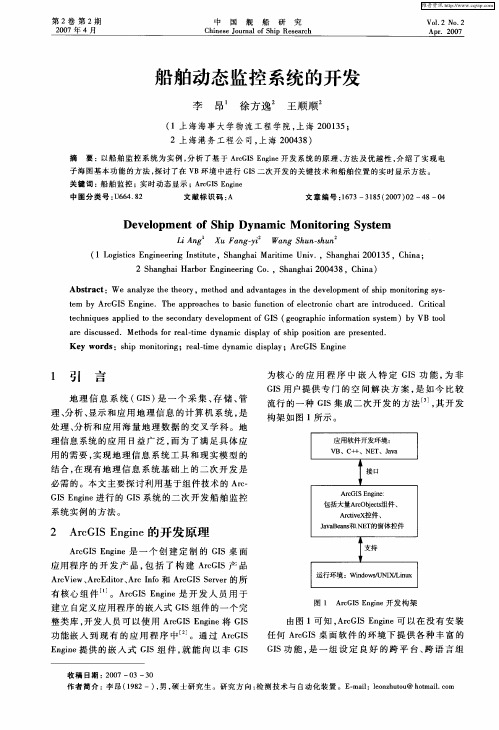
应用程 序 的开 发 产 品 , 括 了 构 建 A c I 包 r S产 品 G
A c i A c dt 、 r If 和 A c I Sre 的 所 r e V w、 rE i rA c n o o rG S evr
I行境、。M,x 运环:i s xn v w L n^ i a u
图 1 A c I E g e开发 构 架 rG S n i n
有核 心 组 件 ¨ 。A c I nie是 开 发 人 员 用 于 rG S E g n
2上海 港务工 程公 司 , 海 2 0 3 ) 上 0 4 8
摘 要 :以船 舶 监 控 系 统 为 实 例 , 析 了基 于 Ae I nie开 发 系 统 的原 理 、 法 及 优 越 性 , 绍 了 实 现 电 分 rG SE gn 方 介
子 海 图基 本 功 能 的方 法 , 讨 了在 V 探 B环 境 中进行 GS二 次 开 发 的关 键 技 术 和 船 舶 位 置 的 实 时 显示 方法 。 I 关键 词 : 舶 监 控 ; 时 动 态 显 示 ; rGSE gn 船 实 A e I nie 中 图分 类 号 : 64 8 U 6 .2 文 献标 识 码 : A 文 章编 号 :63—3 8 ( 07 0 4 0 17 15 2 0 )2— 8— 4
De eo m e t o hi na i o io i y t m v lp n f S p Dy m c M n t rng S s e
海上船舶远程视频监控系统设计方案

海上船舶远程视频监控系统设计方案1. 应用目标运输船舶:实现运输船舶的本地视频监控管理、陆地视频监控管理和突发事务发生时的远程调度指挥,削减财产损失和保障生命平安,为水上交通平安供应有力的支持和保障。
海上救援:当发生海事事故或海上突发事务时,海上救助打捞船只刚好救援抢险,实现陆地应急指挥中心对突发事务现场状况的刚好掌控和调度指挥。
2. 整体设计2.1. 整体网络拓扑整体网络拓扑图整个系统分为陆地调度指挥中心、船舶集团监控中心及船舶无线视频监控管理系统。
陆地调度指挥中心、船舶集团监控中心设置中心管理平台及显示大屏幕系统,实现把船舶无线视频监控在一个监控平台进行管理、限制。
整体网络拓扑如图所示。
2.2. 需求分析2.2.1. 船上的摄像机数量和安装位置镜头1:安装在船头甲板上空对着甲板处,能看到船上甲板的实时状况。
镜头2:安装在船的左铉对着甲板左侧,能看到甲板左侧实时状况。
镜头3:安装在船的右铉镜头对着甲板右侧,看到甲板右侧实时状况。
镜头4:(可选待定)安装驾驶仓里面看到驾驶仓人员操作或驾驶仓后上面看到船的尾部。
(可根船的结构改动镜头的位置和数量。
)2.2.2. 设备需求1、要求摄像机设备是防暴、防水、防腐、带有红外功能。
2、设备要求有升级空间、兼容以后发展的网络。
如3G、4G 等相关的网络。
3、能够兼容以前的监控设备。
2.2.3. 功能实现需求1、能保证白天和晚上视频能看到甲板的实时状况。
2、船上的全部的视频能保存30天。
3、保证本地录像清晰流畅,在有信号状况下远程查看图像清晰流畅。
4、可以将以前的船舶监控整合到同一个操作平台上。
2.3. 设计描述依据以上需求,设计接受远程无线视频监控系统+船舶本地视频监控系统结合的方案,无线视频监控系统链路接受海事卫星和中国联通CDMA1x线路,保障无线通信稳定牢靠。
系统能够兼容下一代网络扩展,系统能够对原有系统进行利用改造。
其设计图如下:2.3.1. 四卡无线视频服务器CB系列四卡无线视频服务器,基于海事卫星BGAN和CDMA1x网络传输而设计。
海洋船舶北斗定位导航系统解决方案(海洋)
海洋船舶北斗定位导航系统解决方案华云科技有限公司2013年10月目录一、综述.................................................................................................... 错误!未指定书签。
二、系统解决方案 .................................................................................... 错误!未指定书签。
(一)设计目标与原则.......................................................................... 错误!未指定书签。
1.设计目标 ................................................................................ 错误!未指定书签。
2.设计原则 ................................................................................ 错误!未指定书签。
(二)总体方案设计.............................................................................. 错误!未指定书签。
1. 卫星导航运营中心 ...................................................................... 错误!未指定书签。
2. 岸端监控中心 .............................................................................. 错误!未指定书签。
基于GPS的船舶定位监控系统.
基于GPS的船舶定位监控系统□华南理工大学郑志恒摘要:为减小海上船舶海损事故的发生,提高船舶监管能力,同时为了更好地对海上运输进行监督管理、提高遇险救助能力,建立高效的水上交通管理系统,在GPS及相关技术的基础上,探讨船舶定位监控系统的解决方案。
关键词:GPS 船舶定位1 目前主要的船舶管理技术目前我国对海上船舶的管理主要通过沿岸各港口的船舶交通管理系统(VTS)。
VTS是负责增进交通安全和提高交通效率以及保护环境的主管部门所实施的服务系统。
其功能有数据搜集、数据评估、信息服务、航行协助服务、交通组织服务、支持联合行动。
1.1 VTS的系统组成VTS由信息获取、信息传输、信息处理三大部分组成。
雷达设备是VTS中的信息获取设备,其作用是对水域目标采集与监视导航。
通信设备是将雷达站采集到的信息传送至VTS控制中心;将VTS控制中心发出的对系统的控制信号送到各雷达站,建立VTS控制中心与船舶间的信息交换。
数据处理设备将对各雷达站的雷达信息进行综合处理显示;对监视区域内航道,锚地的船舶与航标的动静态信息处理与评估、预测潜在危险并报警;记录信息收集和信息服务的情况。
1.2 VTS存在的不足由于目前的VTS主要利用雷达作为技术手段,而雷达存在着观测性能的局限性,使得所提供的目标位置精度及分辨率不高,目标特征参数少,不易识别,以至造成目标的误、漏跟踪,目标丢失及动态监测精度不高;特别是在目标密集、机动性大或海浪、雨雪干扰杂波大时更为严重,制约系统的整体性能。
同时,目前我国各地的VTS中心,覆盖范围小,基本上还处于相互独立、分散管理,只能监测到本水域范围内的船舶航行状况,而对于相邻水域或其它水域有关的船舶航行状况尚不能很好地了解。
因此,寻求一种更可靠的船舶检测定位技术去支持VTS是很有必要的。
2 GPS及技术优点2.1 GPS概述是由美国研制的导航、授时和定位系统。
它由空中卫星、地面跟踪监测站、地面卫星数据注入站、地面数据处理中心和数据通讯网络等部分组成。
船载时间统一系统GPS跳秒问题研究与改进
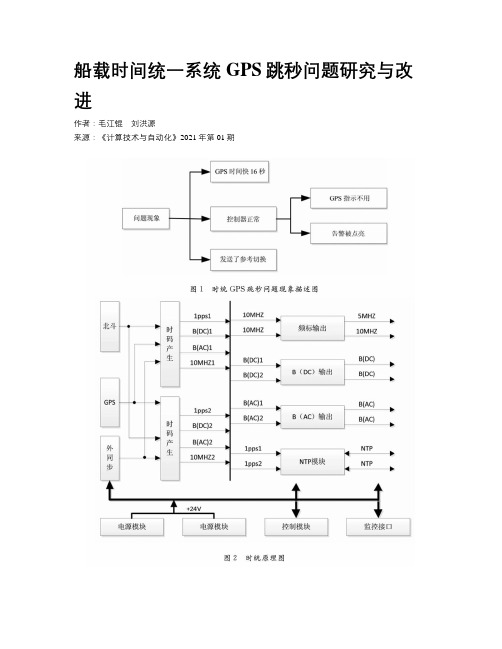
船载时间统一系统GPS跳秒问题研究与改进作者:毛江锟刘洪源来源:《计算技术与自动化》2021年第01期摘要:介绍了船载时间统一系统的组成和GPS模块的工作原理。
指出了现有时间统一系统存在的GPS跳秒问题。
针对船载时间统一系统GPS跳秒问题,建立FTA故障树分析模型,分析故障底事件,定位了GPS跳秒问题的故障部位是GPS定时接收机,并深入分析GPS接收机关于闰秒的相关原理,进一步精确定位了GPS跳秒问题的原因是GPS接收机的闰秒修正软件算法存在缺陷。
为了解决该问题,采用在GPS解码程序中增加GPS跳秒检测机制的方法,检测GPS芯片是否发生跳秒现象来避免产生器误同步,从而避免GPS跳秒问题导致的系统时间异常。
通过搭建GPS模块程序验证平台和设计GPS验证测试软件进行测试,结果表明改进后的GPS解码程序在检测到GPS定时接收机跳秒后,能使GPS定时接收机复位,并设置GPS 信息不可用,避免产生器误同步,从而有效解决了GPS跳秒问题。
关键词:船载;时间统一;GPS;跳秒;FTA(故障树分析);闰秒中图分类号:TP274 文献标识码:AResearch and Improvemen of GPS Jump SecondProblem for Timing System on ShipMAO Jiang-kun, LIU Hong-yuan(China Satellite Marine Track & Control Department, Jiangyin,Jiangsu 214431, China)Abstract:Describes the composition of the ship timing system and the working principle of the GPS module. pointed out the GPS jump second problem of current timing system. For it establishing FTA model and analysis fault bottom events, which positioned the fault location is GPS timing receiver. And analyzed deeply the principle of GPS receiver on the leap second, further pinpoint the reasons is the defect of GPS receiver second correction software algorithm. In order to solve this problem, by means of increasing the GPS jump second detection mechanism in GPS decoding process, which detect jump second phenomenon of GPS chip to avoid the generator false synchronous, and avoid GPS jump second leading to System time anomaly. By setting up the GPS module program verification platform and designing the GPS verification test software for testing. The results show that GPS timing receiver jump second is detected by the improved GPS decoding procedure, which can reset GPS timing receiver, and set the GPS information is not available, to avoid generator false synchronous, so as to effectively solve the GPS problem.Key words:ship; timing system; GPS; jump second; FTA (fault tree analysis); leap second船載时间统一系统为船舶各用户及配套设备提供标准频率和标准时间信号,确保岸船设备之间时间同步,特别是对科学试验中整个试验系统时间和频率的统一、保证测量数据正确有效有着重大意义。
船舶定位监控系统与船舶信息化管理

船舶定位监控系统与船舶信息化管理摘要:随着我国船舶行业的快速发展,船舶定位监控系统的稳定性与准确性逐渐受到业内人士的关注,很多专家学者对船舶定位监控系统的高科技应用进行了探索,随着互联网技术的不断提升,我国船舶行业管理也逐渐趋向于信息化。
基于此,本文深刻阐述了GPS以及WCF技术在船舶定位监控系统的应用,在此基础上分析了我国船舶信息化管理现状,并对此提出了初步的改进措施,希望能为我国船舶事业的发展添砖加瓦。
关键词:船舶行业;定位监控系统;信息化管理一、GPS技术在船舶定位监控系统的应用GPS系统主要由空间卫星星座、地面监控系统以及信号接收系统三部分组成,GPS在船舶定位监控系统中的应用是通过计算机技术、移动通信技术等多种技术的辅助实现的,通过对多种技术的综合应用极大程度上提高了船舶定位监控系统的运行效率。
首先GPS技术的应用使船舶的定位更加精确,定位结果甚至可精确至个位数,根据定位系统对定位坐标修正内容以及精准度的不同,GPS定位可分为相位差分、伪距差分以及位置差分三种形式,例如伪距差分主要是对定位结果公共误差的修正。
其次GPS技术使船舶定位监控系统的监控覆盖面更宽,将GPS技术与计算机技术相结合,船舶定位监控系统只需有网络的支持便可发挥定位与监控功能,从而实现对全国范围的监控,且方便了船舶监控部门与船舶之间的沟通与交流,有利于提高船舶在行驶过程中的安全性与稳定性。
最后GPS技术可容纳更大的信息量,使多船只之间实现信息共享,船舶监管部门可以动态地、及时地掌握船舶的运行状态,并与船舶之间进行迅速的信息沟通,提高对船舶的指挥调控效率。
二、WCF技术在船舶定位监控系统中的应用近些年来WCF技术也在船舶定位监控系统中得到了极大应用,WCF技术的实现需要百度API地图资源的支持,WCF技术通过对船舶的定位,将船舶的具体位置以坐标的形式表示出来,经过进一步的处理后将具体坐标标识在百度API地图中,这种方式往往需要提前将API地图存入船舶定位监控系统或者利用网络将对API地图进行即时利用,从而导致占用定位监控系统内存或网络资源,影响定位监控系统的综合效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首 先将 GP S接 收 机基 准 站 安 置在 施 工 地 点
附近精 确 的已知点 位置 , 然后将 其 余 2台 GP S接
船 舶 监 控 系统 中 GP S定位 功能 的设 计 与 开发
薛 君, 郭建 明 , 黄 珍
( 汉理 工 大 学 自动 化 学 院 , 汉 4 0 6 ) 武 武 3 0 3 摘 要 : 绍 GP 介 S坐 标 转 换 的 2种 转 换算 法 , 将 其 各 自设 计 为 独 立 的 程 序 包 , 装 为 动 态 链 接 库 的形 并 封
动涉 及到 航迹 和航 向两 方 面 因素 , 为达 到 有 效减 弱相 关误 差 以获得 精 确 的定 位 结 果 , 体 姿 态定 船
位采 用 目前 G S技 术 中精 度 最高 的“ +2 动态 P 1 ”
无 法 和主控制 系 统 融 为一 体 , 施 工过 程 监 控 带 给
来 一定 的复 杂度 。
式 , 服 了 目前 市 场 上 GP 克 S数 据 转 换 模 块 无 法 和 主 控 制 系 统 融合 的 缺 点 , 而 实 现 真 正 意 义 上 的全 自动 监 控 从
一
体化 。
关键词 : S 坐标转换 ; GP ; 动态链接库 ; 监控系统
中图 分 类 号 : 7. U6 5 7 文献 标 志 码 : A
D e i n a v l p e fGPS T e h i u s i he sg nd De eo m nto c n q e n t Shi S M o t e nto s e p’ nior d Co r lSy t m
X UE t ,GU J a - n ,HUANG e Jm O in mi g Zh n ( t ma i n S h o ,W u a n v r iy o c n l g ,W u a 3 0 0 Au o t c o l o h n U i e s t fTe h oo y h n 4 0 7 ,Ch n ) ia Ab ta t s r c :Two k n s o o r i a e ta s o ma i n a i me i b s d o re t t n GP d e h i u s id fc o d n t r n f r t rt o h t a e n o in a i S mo e t c n q e c o a e i to u e .Ea h o h m a e n d s n d a n ta h d p o r mme p c g ih i e c p u a e o r n r d c d c ft e h d b e e i e s a u a t c e r g a g - a k e wh c s n a s lt d t d n mi i k l r r .I v r a h ia v n a e t a y a cl b a y to e c me t ed s d a tg h t n i GPS d t r n f r t n mo ue c n tb a a ta s o ma i d l a ’ e i ln e — o mp a t d i n
维普资讯
第 3 7卷
第3 期
船 海 工 程
S P& OCEAN NGI ERI HI E NE NG
Vo 7 No 3 L3 . J n 20 u.08
20 0 8年 6月
文章编号 :6 17 5 (0 8 0 —船 舶 GP S定 位 体 系结 构 设 计
工程 船舶在 施 工 过程 中是 运 动状 态 , 体 运 船
工 等方 面起着极 为重 要 的作用[ 。 目前 市场 上 推 1 ]
出的 G S定位 软件 独立 于工程对 象 的控 制 系统 , P
只能在 附送 的监 视 系统 中显 示 被测 对 象 的 位 置 ,
t h o tc n r ls s e S h tt e f l u o t m n e r t e wa e l e it al . o t e h s o t o y tm O t a h u l a t ma i i t g a i s r a i d v ru l y s v z y
置及方 向的精 确 判 断 。同 时 , 件 开 发部 分 采 用 软 动态链 接库 形式 , 方 便 地嵌 入 到工 程船 舶 控 制 能 系统 中 , 监视 控制 与工 程 控制 融 为 一 个完 整 的 使 监 控系统 , 最后 以铺 排船 为例应 用到 实 际工 程 中 , 实 现真 正意 义上 的全 自动控制 , 提高 了施 工效率 。
Ke r s ywo d :GP c o d n t r n f r to S o r i a e ta so ma i n;d n mi l k l r r y a c i i a y;mo i rc n r l y tm n b nt o t o s e o s
GP S提供 的连续 、 高精 度 的 船位 对船 舶 导航 定 位 、 证工程 船 舶 安全 经 济 地 在计 划 航 线 上施 保
本 文针对 以上 问题 , 计 一种 GP 设 S定位 通 用
差分 定位 方法 。该 系统 由 3台 G S接 收机 ( ] P 其 中 1台作 为基 站 、 2台作 为 流 动站 )数 据 处 理 另 、 软 件及相 应 的用户 设备 如计算 机气 象仪器 等所 组
成。
模块 。该 模 块可实 现 G S定 位数 据转 换 , P 船舶 位