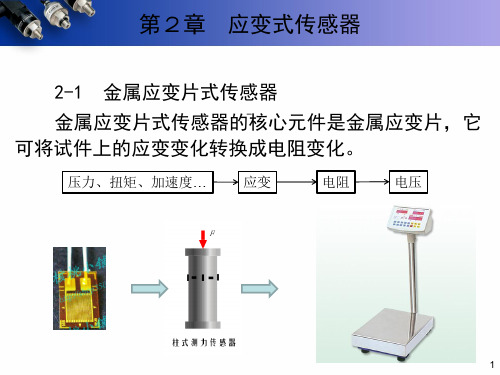
传感器:第2章应变式传感器
合集下载
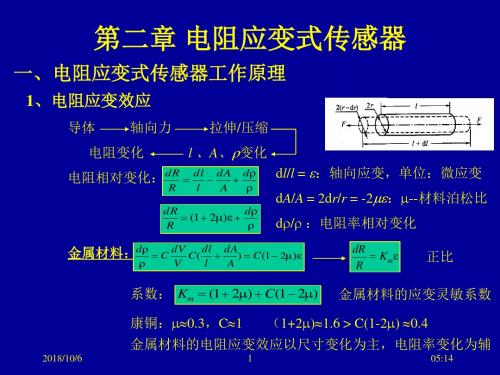
第2章 电阻应变式传感器
( 2 2 )
传感器原理与应用——第二章
电阻相对变化量为:
dR dL d dA R L A
若电阻丝是圆形的, 则A=πr ² 微分 ,对r
( 3 2 )
l
2r
2(r-dr)
F
l+ dl
得dA=2πr dr,则:
dA 2rdr dr 2 2 A r r
图2-1 金属丝的应变效应
• 应变式电阻传感器是目前测量力、力矩、 压力、加速度、重量 等参数应用最广泛的传感器。
传感器原理与应用——第二章
2.1 电阻应变片的基本原理 应变式传感器的核心元件是电阻应变片,它可将试件 上的应力变化转换成电阻变化。 2.1.1 应变效应 当导体或半导体在受到外界力的作用而不能产生位移
时,则会产生机械变形(它的几何形状和尺寸将
指 示 应 变 卸载
Δε
εi
加载 机械应变εR 图2-6 应变片的机械滞后
传感器原理与应用——第二章
产生原因:应变片在承受机械应变后的残余变形,使
敏感栅电阻发生少量不可逆变化;在制造或粘贴应变
片时,敏感栅受到的不适当的变形或粘结剂固化不充
分等。
机械滞后值还与应变片所承受的应变量有关,加载 时的机械应变愈大,卸载时的滞后也愈大。所以,通常 在实验之前应将试件预先加、卸载若干次,以减少因机 械滞后所产生的实验误差。
很宽的范围内均为线性关系。
传感器原理与应用——第二章
即:
R
R
K 或
K
R
R
( 14 2 )
K为金属应变片的灵敏系数。
测量结果表明,应变片的灵敏系数K恒小于线材的
灵敏系数KS。原因主要是胶层传递变形失真及横向效
第2章 应变式传感器1

2.6金属丝式应变传感器的应用
1、柱式力传感器
弹性元件可分为实心和空心两种在轴向布置一个或几个应变,在圆 周方向布置同样数目的应变片,后者取符号相反的横向应变,从而构成 差动对。
1
2
[(1 ) (1 ) cos 2 ]
F SE
1
F 2 1 SE
2.6金属丝式应变传感器的应用
3、应变式压力传感器
应变式压力传感器主要用来测量流动介质的动态或静态压力, 如动力管 道设备的进出口气体或液体的压力、发动机内部的压力、 枪管及炮管内部的 压力、内燃机管道的压力等。 应变片压力传感器大多采用膜片式或筒式弹性元件。 下图为膜片式压力传感器,应变片贴在膜片内壁,在压力p作用下,膜片 产生径向应变εr和切向应变εt,表达式分别为
1、测量原理
R1 R4 R2 R3 Ig E Rg ( R1 R2 )( R3 R4 ) R1 R2 ( R3 R4 ) R3 R4 (R1 R2 )
U g I g Rg E ( R1 R4 R2 R 3 ) 1 ( R1 R2 )(R 3 R4 ) [ R1 R2 (R 3 R4 ) R 3 R4 ( R1 R2 )] Rg
E R1 Uo 2 R1
2.5电阻应变片的温度误差及其补偿
1、温度误差产生的原因
(1)温度变化引起应变片敏感栅电阻变化而产生附加应变
(
(2)敏感栅材料与被测试件的线膨胀系数不同引起的电阻变化 R ( ) 2 K ( e g )t R
温度变化引起的总电阻变化为 R R R ( )t ( )1 ( ) 2 t t K ( e g )t R R R 相应的虚假应变为
第2章 应变式传感器(电阻式传感器)

工艺复杂, 将逐渐被横向效应小、 其他方面性能更优越的箔式应变计所
代替。
(a)
(b)
(c)
图 2.2金属丝式应变计常见形势
第2章 应变式传感器
箔式应变计(实验中用的)的线栅是通过光刻、腐蚀等工艺制成很薄 的金属薄栅(厚度一般在0.003~0.01mm)。与丝式应变计相比有如下优 点:
(1) 工艺上能保证线栅的尺寸正确、 线条均匀, 大批量生产时, 阻值离 散程度小。 (2) 可根据需要制成任意形状的箔式应变计和微型小基长(如基长为 0.1 mm)的应变计。 (3) 敏感栅截面积为矩形, 表面积大, 散热好, 在相同截面情况下能通过 较大电流。 (4) 厚度薄, 因此具有较好的可挠性, 它的扁平状箔栅有利于形变的传 递。 (5) 蠕变小, 疲劳寿命高
式中, 应力 l T E (金属或者半导体的弹性模量) E l 其中, ε=Δl/l为轴向应变。 则有
第2章 应变式传感器
k0
R / R
1 2 E
对金属来说, πE很小, 可忽略不计, μ=0.25~0.5, 故k
因此, 将同样长的金属线材做成敏感栅后, 对同样应 变, 应变计敏感栅的电阻变化较小, 灵敏度有所降低。 这 种现象称为应变计的横向效应。
第2章 应变式传感器
下面计算横向效应引起的误差。
图为 应变片敏感栅半圆弧部分的形状。沿轴向应 变为εX ,沿横向应变为εY 。
X
θ
dl
dθ
丝绕式应变片敏感栅半圆弧形部分
第2章 应变式传感器
k0为单根导电丝的灵敏系数, 表示当发生应变时, 其电阻变 化率与其应变的比值。 k0的大小由两个因素引起, 一项是由 于导电丝的几何尺寸的改变所引起, 由(1+2μ)项表示, 另 一项是导电丝受力后, 材料的电阻率ρ发生变化而引起, 由
第2章 电阻应变计式传感器

• 相对误差为:
2 p t l l 1 lf e sin 1 t 6
• 上式表明,当频率增加时,误差增大,因此应使:
l l max
6 e
f max
6 e l
第2章 电阻应变计式传感器 疲劳寿命
d E
式中:π——半导体材料的压阻系数;
(2-5)
σ——半导体材料的所受应变力;
E——半导体材料的弹性模量;
10
2.1电阻应变计的基本原理结构和应用
2.半导体材料的压阻效应 则:
dR (1 2 E ) R
(2-6)
由于π E>>(1+2μ ),因此半导体丝材的灵敏
21
第2章 电阻应变计式传感器
第二节 电阻应变计的主要特性
应变计多为一次性使用,应变计的特性是 按规定的条件,从大批量生产中按比例抽 样实测而得。
静态特性
灵敏系数K R • 一般K<K0
R K x
, x 应变计的轴向应变
第2章 电阻应变计式传感器 横向效应及横向效应系数H • 由于传感器是多线的,线与线之间连接部分不 在测量方向上,引起横向效应 • 计算公式:R R Kx x K y y Kx (1 aH ) x H——双向灵敏系数比 • 标定情况下: R R Kx (1 0 H ) x 可见,横向效应使传感器的灵敏度系数下降, 必须使H减小 • 丝绕式应变计的长度要长、横栅要小。 • 对横向效应分析结果的应用结果之一是箔式应 变计
t
31
2.3电阻应变计的温度效应及其补偿
1、温度自补偿法
(2)双丝自补偿应变计 敏感栅由电阻温度系数 一正一负的两种合金丝串接 而成。当工作温度变化时, 若Ra栅产生正的热输出ε a 与Rb栅产生负的热输出ε b 相等或相近,就可达到 自补偿的目的,即:
第二章_应变式传感器_

t K e g 0
t K g e
即
选择应变片时,若使其电阻温度系数 t 和线膨胀系数 与 g 满足上式的条件,即可实现温度自补 e 偿。具有这种敏感栅的应变片称为单丝自补偿应变片。
②双丝组合式自补偿应变片
第二章
是由两种不同电阻温度系数(一种为正值,一种 为负值)的材料串联组成敏感栅,以达到一定的温度 范围内在一定材料的试件上实现温度补偿的,如图。 这种应变片的自补偿条件要求粘贴在某种试件上的两 段敏感栅,随温度变化而产生的电阻增量大小相等,符号 相反,即
B R1 R2 Rg
A
R3 R4
C
Ig
D
E
电桥线路原理图
第二章
当R1R4=R2R3时,Ig=0,Ug=0,即电桥处于平衡状态。 若电桥的负载电阻Rg为无穷大,则B、D两点可视为开 路。 当
R i Ri
Ei R1 R2 R3 R4i Ug ( ) 4 R R R R Ei K ( 1 - 2 - 3 4 ) 4
4 零点漂移和蠕变
零点漂移产生原因:敏感栅通电后的温度效应; 应变片的内应力逐渐变化;粘结剂固化不充分等。 如果在一定温度下,使应变片承受恒定的机械应 变,其电阻值随时间增加而变化的特性称为蠕变。 一般蠕变的方向与原应变量的方向相反。 产生原因:由于胶层之间发生“滑动”,使力传 到敏感栅的应变量逐渐减少。
第二章
电桥补偿法
R1 U0 Rb R1 +⊿R Rb -⊿R
R3
U
R4
R1+⊿R Rb-⊿R U0
F
R1 Rb
F
R3 U
R4
——电阻率的相对
——截面积的相对变化。
第2章 电阻应变式传感器

2
F
3.2.2 位移传感器
R4 R3 U0 R1 E R2 R1 R2 F
图2.11 应变片式线位移传感器
U
3.2.4 压力传感器
0
= k U ε = kU
3l 4 Eb h
2
F
3.2.3 加速度传感器
作业: 作业:
1. 什么叫电阻式传感器?什么是电阻应变效应? 什么叫电阻式传感器?什么是电阻应变效应? 2. 电阻应变式传感器的工作原理? 电阻应变式传感器的工作原理? 3. 作出桥式测量电路图,并推导直流电桥平衡条件, 作出桥式测量电路图,并推导直流电桥平衡条件, 以及不对称电桥的输出电压变化. 以及不对称电桥的输出电压变化.
3.2 应用
3.2.1 应变式测力与荷重传感器
kU F U 0 = 2 (1 + ) AE
图2.8 受力圆柱上应变片的粘贴
图2.9 受力薄臂环上应变片的粘贴
U
0
= k U ε = kU
1 .092 R bδ E
2
F
图2.10 受力等强度梁应变片的粘贴
U
0
= k U ε = kU
6l E b0 h
1
Z3 = Z 2Z 4
z1 z3 = z 2 z 4
φ1 + φ3 = φ2 + φ4
或
(R1 + jX1)(R3 + jX3 ) = (R2 + jX2 )(R4 + jX4 )
2.2 电桥的调平衡
在应变片工作之前必须进行电桥的平衡调节. 在应变片工作之前必须进行电桥的平衡调节.对于直流 电桥可采用串联或并联电位器法, 电桥可采用串联或并联电位器法,对于交流电桥一般采用阻 容调平衡法. 容调平衡法.
F
3.2.2 位移传感器
R4 R3 U0 R1 E R2 R1 R2 F
图2.11 应变片式线位移传感器
U
3.2.4 压力传感器
0
= k U ε = kU
3l 4 Eb h
2
F
3.2.3 加速度传感器
作业: 作业:
1. 什么叫电阻式传感器?什么是电阻应变效应? 什么叫电阻式传感器?什么是电阻应变效应? 2. 电阻应变式传感器的工作原理? 电阻应变式传感器的工作原理? 3. 作出桥式测量电路图,并推导直流电桥平衡条件, 作出桥式测量电路图,并推导直流电桥平衡条件, 以及不对称电桥的输出电压变化. 以及不对称电桥的输出电压变化.
3.2 应用
3.2.1 应变式测力与荷重传感器
kU F U 0 = 2 (1 + ) AE
图2.8 受力圆柱上应变片的粘贴
图2.9 受力薄臂环上应变片的粘贴
U
0
= k U ε = kU
1 .092 R bδ E
2
F
图2.10 受力等强度梁应变片的粘贴
U
0
= k U ε = kU
6l E b0 h
1
Z3 = Z 2Z 4
z1 z3 = z 2 z 4
φ1 + φ3 = φ2 + φ4
或
(R1 + jX1)(R3 + jX3 ) = (R2 + jX2 )(R4 + jX4 )
2.2 电桥的调平衡
在应变片工作之前必须进行电桥的平衡调节. 在应变片工作之前必须进行电桥的平衡调节.对于直流 电桥可采用串联或并联电位器法, 电桥可采用串联或并联电位器法,对于交流电桥一般采用阻 容调平衡法. 容调平衡法.
第二章、应变式传感器1

原因
(1)应变片的敏感栅具有一定温度系数; (2)应变片材料与测试材料的线膨胀系数不同。
3.4 电阻应变片的测量电路
单臂应变电桥
工作臂 双臂应变电桥 全臂应变电桥
应
变
电源
直流电桥:
电
交流电桥:
桥
电源端对称
桥臂关系 半等臂电桥 输出端对称
全等臂电桥
3.4.1 直流电桥
平衡条件 R1R4=R2R3
n=R2/R1=R4/R3
常用金属薄膜应变片
金属应变片的基本结构
转换元件 F
敏感元件
二、半导体应变片结构 体型、薄膜型和扩散型
1、体型半导体应变片 半导体材料硅或锗晶体按一定方向切割成片状小
条,经腐蚀压焊粘贴在基片上制成。
体型半导体应变片的结构
2、薄膜型半导体应变片
通过薄膜制备技术,在带有绝缘层的试件上沉积 半导体材料薄膜而制成。
对电阻丝材料应有如下要求:
① 灵敏系数大,且在相当大的应变范围内保持常数; ②ρ值大; ③ 电阻温度系数小,以免环境温度变化改变其阻值; ④ 与铜线的焊接性能好,与其它金属的接触电势小; ⑤ 机械强度高, 具有优良的机械加工性能。
表3-1 常用金属电阻丝材料的性能
康铜是目前应用最广泛的应变丝材料,这是由于 它有很多优点:灵敏系数稳定性好,不但在弹性变形 范围内能保持为常数, 进入塑性变形范围内也基本上 能保持为常数;康铜的电阻温度系数较小且稳定,当 采用合适的热处理工艺时,可使电阻温度系数在 ±50×10-6/℃的范围内;康铜的加工性能好,易于焊 接, 因而国内外多以康铜作为应变丝材料。
Κ κ 卡帕 Kappa 介质常数 Λ λ 兰姆达 Lambda 波长(小写);体积 Μ μ 缪 Mu 磁导系数;微 ;放大因数(小写) Ν ν 纽 Nu 磁阻系数 Ξ ξ 克西 Xi Ο ο 奥米克戎 Omicron Π π 派 Pi 圆周率=圆周÷直径=3.1416 Ρ ρ 柔 Rho 电阻系数(小写) Σ σ 西格玛 总和(大写),表面密度;跨导(小写) Τ τ 陶 Tau 时间常数 Υ υ 宇普西隆 Upsilon 位移 Φ φ 斐(佛爱) Phi 磁通; 角 Χ x 西 Chi Ψ ψ 普西 Psi 角速;介质电通量(静电力线);角 Ω ω 欧米伽 Omega 欧姆(大写);角速(小写);
(1)应变片的敏感栅具有一定温度系数; (2)应变片材料与测试材料的线膨胀系数不同。
3.4 电阻应变片的测量电路
单臂应变电桥
工作臂 双臂应变电桥 全臂应变电桥
应
变
电源
直流电桥:
电
交流电桥:
桥
电源端对称
桥臂关系 半等臂电桥 输出端对称
全等臂电桥
3.4.1 直流电桥
平衡条件 R1R4=R2R3
n=R2/R1=R4/R3
常用金属薄膜应变片
金属应变片的基本结构
转换元件 F
敏感元件
二、半导体应变片结构 体型、薄膜型和扩散型
1、体型半导体应变片 半导体材料硅或锗晶体按一定方向切割成片状小
条,经腐蚀压焊粘贴在基片上制成。
体型半导体应变片的结构
2、薄膜型半导体应变片
通过薄膜制备技术,在带有绝缘层的试件上沉积 半导体材料薄膜而制成。
对电阻丝材料应有如下要求:
① 灵敏系数大,且在相当大的应变范围内保持常数; ②ρ值大; ③ 电阻温度系数小,以免环境温度变化改变其阻值; ④ 与铜线的焊接性能好,与其它金属的接触电势小; ⑤ 机械强度高, 具有优良的机械加工性能。
表3-1 常用金属电阻丝材料的性能
康铜是目前应用最广泛的应变丝材料,这是由于 它有很多优点:灵敏系数稳定性好,不但在弹性变形 范围内能保持为常数, 进入塑性变形范围内也基本上 能保持为常数;康铜的电阻温度系数较小且稳定,当 采用合适的热处理工艺时,可使电阻温度系数在 ±50×10-6/℃的范围内;康铜的加工性能好,易于焊 接, 因而国内外多以康铜作为应变丝材料。
Κ κ 卡帕 Kappa 介质常数 Λ λ 兰姆达 Lambda 波长(小写);体积 Μ μ 缪 Mu 磁导系数;微 ;放大因数(小写) Ν ν 纽 Nu 磁阻系数 Ξ ξ 克西 Xi Ο ο 奥米克戎 Omicron Π π 派 Pi 圆周率=圆周÷直径=3.1416 Ρ ρ 柔 Rho 电阻系数(小写) Σ σ 西格玛 总和(大写),表面密度;跨导(小写) Τ τ 陶 Tau 时间常数 Υ υ 宇普西隆 Upsilon 位移 Φ φ 斐(佛爱) Phi 磁通; 角 Χ x 西 Chi Ψ ψ 普西 Psi 角速;介质电通量(静电力线);角 Ω ω 欧米伽 Omega 欧姆(大写);角速(小写);
传感器:第2章应变式传感器
如果电桥各臂都改变,则有
Ug
E
(R1 R1)(R4 R4 ) (R2 R2 )(R3 R3) (R1 R1 R2 R2 )(R3 R3 R4 R4 )
(一)等臂电桥
当 R1 R2 R3 R4 时,称为等臂电桥。此时
Ug
E
R(R1 R2 R3 R4 ) R1R4 R2R3 (2R R1 R2 )(2R R3 R4 )
应变式传感器包括两部份,一是弹性敏感元件,将被 测量转换为应变;二是应变片,将应变转化为电阻 的变化。
被测量
应变量
弹性元件
电阻
应变片
变化
(一)柱式压力传感器 圆柱式压力传感器分为实心和空心两种。
柱式力传感器应变片的粘贴方式
对于柱式压力传感器其轴向应变和圆周方向应变与轴 向受力成正比例关系。
轴向应变
下面分析横向效应产生的原因。设轴向应变为 , 横向应变为 r。
2006.9.11 JC204->
若敏感栅有 n 个纵栅,每根长为 l ,圆弧横栅的半
径为 r ,在轴向应变 作用下,全部纵栅的形
变 L1 nl 。
在半圆弧上取一小微元 dl rd ,上面的应变为
1 2
(
r )
1 2
(
r ) cos 2
一、压阻效应 单晶硅材料在受到应力后,其电阻率发生明显的变化,
这种现象被称为压阻效应。 对于一条形的半导体材料,其电阻变化与应变的关系
d ( r 2 ) r2
2 dr r
2 r
根据泊松效应,有
r 上式中 为泊松系数。
由实验结果有
通常 C 1
d C dV V
由于 V S l
dV V
dS S
传感器原理及应用-第2章
电桥电路
力、加速度、荷重等
应变
电阻变化
电压、电流
图2-1 电阻应变式传感器典型结构与测量原理
电阻应变片:利用金属丝的电阻应变效应或半导 体的压阻效应制成的一种传感元件。
电阻应变片的分类: 金属应变片和半导体应变片。
一、电阻应变片
(一)工作原理——应变效应
导体或半导体材料在外力的作用下产生机械变形时, 其电阻值相应发生变化的现象称为应变效应。
第二章 应变式传感器
主要内容:
一、电阻应变式传感器 二、压阻式传感器
本章重点:
电阻应变式传感器的构成原理及特性 电桥测量电路的结构形式及特点 压阻式传感器的工作原理
基本要求:
掌握电阻应变式传感器的构成原理及特性, 掌握电桥测量电路的结构形式及和差特性,掌握 压阻式传感器的工作原理及设计特点。
in2x
图2-10 应变片对应变波的动态响应
应变片对正弦应变波的响应是在其栅长 l 范围内所
感受应变量的平均值 m,低于真实应变波 t ,从而
产生误差。
t 瞬时应变片中点的应变(真实应变波) 值为:
t
0
s
in2
xt
t 瞬时应变片的平均应变(实际响应波) 值为:
m
也可写成增量形式
RRKs
l l
Ks
式中,Ks——金属丝的应变灵敏系数。物理意义是单位应变 所引起的电阻相对变化量。
金属丝的灵敏系数取决于两部分:
①金属丝几何尺寸的变化, 0 .3 (1 2 ) 1 .6
②电阻率随应变而引起的变化
Hale Waihona Puke 金属丝几何尺寸 金属本身的特性C
如康铜,C≈1, Ks ≈2.0。其他金属, Ks一般在1.8~4.8范围内。
传感器原理及应用(第三版)第2章
上一页 下一页 返 回
金属丝的应变灵敏系数
K0由两部 分组成
①受力后材料几何尺寸变化(1+2μ)
②受力后材料电阻率的变化(Δρ/ρ)/ε(与几何尺寸及 金属丝本身特性有关)
对于金属电阻丝(1+2μ )>>(Δ ρ /ρ )/ε ,金属丝应变片灵敏 系数k0主要由材料的几何尺寸变化决定,即对于用金属制成的应变片 来说,起主要作用的是应变效应(电阻的相对变化与伸长或缩短间 存在比例关系叫应变)。金属丝的μ =0.25~0.5(钢的μ =0.285)故 k0≈1+2μ ,k0≈1.5~2。 对于半导体则不同:当半导体材料受到应力作用后,其电阻率发生 明显的变化,称为压阻效应。因此(Δρ/ρ)/ε=πE >> (1+2μ ) 故可忽略(1+2μ )的影响,即对于用半导体制成的压阻传感器来说, 起主要作用的是压阻效应。半导体的k0≈ πE ≈ 50~100,灵敏度是 金属材料的几十到上百倍。 弹性模 压阻系
AR RK
上一页
下一页
返
回
不引入补偿块(如下图所示) – 起到温度补偿作用 – 可提高灵敏度
A:如图,R1、RB正交粘结 则: U AR' RK (1 )
0
R正反面(R1受拉,应变为正;RB受压,应变为负) 则: '
U0 2 AR RK
应变计
应变片的粘贴
1. 检查通断 13.固定 5 .用透明胶带将应变片与构件在引脚处 临时固定,移动胶带位置使应变片达到 3 .再用细砂纸精磨( 45度交叉纹)。 粘贴、焊接后,用胶布将引线和 正确定位。 2 .在选定贴应 被测对象固定在一起,防止拉动 4 .用棉纱或 引线和应变片。 变片的位置划
金属丝的应变灵敏系数
K0由两部 分组成
①受力后材料几何尺寸变化(1+2μ)
②受力后材料电阻率的变化(Δρ/ρ)/ε(与几何尺寸及 金属丝本身特性有关)
对于金属电阻丝(1+2μ )>>(Δ ρ /ρ )/ε ,金属丝应变片灵敏 系数k0主要由材料的几何尺寸变化决定,即对于用金属制成的应变片 来说,起主要作用的是应变效应(电阻的相对变化与伸长或缩短间 存在比例关系叫应变)。金属丝的μ =0.25~0.5(钢的μ =0.285)故 k0≈1+2μ ,k0≈1.5~2。 对于半导体则不同:当半导体材料受到应力作用后,其电阻率发生 明显的变化,称为压阻效应。因此(Δρ/ρ)/ε=πE >> (1+2μ ) 故可忽略(1+2μ )的影响,即对于用半导体制成的压阻传感器来说, 起主要作用的是压阻效应。半导体的k0≈ πE ≈ 50~100,灵敏度是 金属材料的几十到上百倍。 弹性模 压阻系
AR RK
上一页
下一页
返
回
不引入补偿块(如下图所示) – 起到温度补偿作用 – 可提高灵敏度
A:如图,R1、RB正交粘结 则: U AR' RK (1 )
0
R正反面(R1受拉,应变为正;RB受压,应变为负) 则: '
U0 2 AR RK
应变计
应变片的粘贴
1. 检查通断 13.固定 5 .用透明胶带将应变片与构件在引脚处 临时固定,移动胶带位置使应变片达到 3 .再用细砂纸精磨( 45度交叉纹)。 粘贴、焊接后,用胶布将引线和 正确定位。 2 .在选定贴应 被测对象固定在一起,防止拉动 4 .用棉纱或 引线和应变片。 变片的位置划
第2节 应变式传感器

实际使用, 实际使用,多采用等臂电桥或对称电桥
用法一: 用法一:等臂电桥
当R1=R2=R3=R4=R时: 时
R(∆R1 − ∆R2 − ∆R3 + ∆R4 ) + ∆R1∆R4 − ∆R2∆R3 Ug = E (2R + ∆R1 + ∆R2 )(2R + ∆R3 + ∆R4 )
R>>∆Ri,则:
E ∆R1 ∆R2 ∆R3 ∆R4 EK (ε1 −ε2 −ε3 + ε4 ) Ug = − − + = R R R 4 4 R
纸(不能太厚),一般为(0.02 ~ 0.04)mm。 不能太厚),一般为( ),一般为 ) 。 基底长:基底的全长,基底宽: 基底长:基底的全长,基底宽:基底宽度
3. 粘结剂
有机
聚丙烯酸酯 酚醛树脂 有机硅树脂 聚酰亚胺 磷酸盐 硅酸 硼酸盐
无机
4.引线 引线
直径( 镀锡铜线,要求电阻率低、 直径(0.1-0.15)mm 镀锡铜线,要求电阻率低、电阻温度系数 ) 抗氧化,易于焊接。 小,抗氧化,易于焊接。
∆R ∆L 2nl + (n − 1)πr (n − 1)πr = KS = K Sε + KSε r R L 2L 2L
令:
(n −1)πr Ky = KS 2L
则横向系数: 则横向系数:
H=
Ky Kx
(n − 1)πr = 2nl + (n − 1)πr
3.机械滞后 机械滞后
应变片粘贴在被测试件上,当温度恒定时, 应变片粘贴在被测试件上,当温度恒定时,其加载特 性与卸载特性不重合,其差值即为机械滞后。 性与卸载特性不重合,其差值即为机械滞后。 指 示 应 卸载 变 ∆ε εr
第2章 应变式传感器
2.6~2.8
Pt(纯)
4.6
Pt(80) Ir(20)
4.0
Pt(91.5) W(8.5)
3.2
1.0~1.1
1.24~1.42
1.0 1.3~1.5
0
175
30~40 3 000 590 192
线膨胀系数
(×10-6/℃ ) 15
14
13.3
③
实验研究发现,
d
C dV V
,C为与材料相关的常数
又 dV d(Sl) dS dl (1 2)
V Sl S l
dR R
C(1
2)
2
Ks
其中,Ks为金属丝的灵敏度系数,是与材料相 关的常数,对金属或合金一般在1.8~3.6范围内。
金属丝电阻的相对变化与其伸长或缩短之间存在比例关系。
压决定的常数。
由上式可知,当R3 、 R4为 常数时,R1和R2对输出电压的作 用方向相反。利用这个基本特性
可实现对温度的补偿,并且补偿
效果较好,这是最常用的补偿方
法之一。
图2-7 桥路补偿法
32
第2章 应变式传感器
测量应变时,使用两个应变片,
一片贴在被测试件的表面,如图2-8
中R1,称为工作应变片。另一片贴 在与被测试件材料相同的补偿块上,
• 价格低廉,品种多样,便于选择。
3
第2章 应变式传感器
应变式传感器也存在一定缺点: • 在大应变状态中具有较明显的非线性,半导体应变式传
感器的非线性更为严重; • 应变式传感器输出信号微弱,故它的抗干扰能力较差,
因此信号线需要采取屏蔽措施; • 应变式传感器测出的只是一点或应变栅范围内的平均应
Pt(纯)
4.6
Pt(80) Ir(20)
4.0
Pt(91.5) W(8.5)
3.2
1.0~1.1
1.24~1.42
1.0 1.3~1.5
0
175
30~40 3 000 590 192
线膨胀系数
(×10-6/℃ ) 15
14
13.3
③
实验研究发现,
d
C dV V
,C为与材料相关的常数
又 dV d(Sl) dS dl (1 2)
V Sl S l
dR R
C(1
2)
2
Ks
其中,Ks为金属丝的灵敏度系数,是与材料相 关的常数,对金属或合金一般在1.8~3.6范围内。
金属丝电阻的相对变化与其伸长或缩短之间存在比例关系。
压决定的常数。
由上式可知,当R3 、 R4为 常数时,R1和R2对输出电压的作 用方向相反。利用这个基本特性
可实现对温度的补偿,并且补偿
效果较好,这是最常用的补偿方
法之一。
图2-7 桥路补偿法
32
第2章 应变式传感器
测量应变时,使用两个应变片,
一片贴在被测试件的表面,如图2-8
中R1,称为工作应变片。另一片贴 在与被测试件材料相同的补偿块上,
• 价格低廉,品种多样,便于选择。
3
第2章 应变式传感器
应变式传感器也存在一定缺点: • 在大应变状态中具有较明显的非线性,半导体应变式传
感器的非线性更为严重; • 应变式传感器输出信号微弱,故它的抗干扰能力较差,
因此信号线需要采取屏蔽措施; • 应变式传感器测出的只是一点或应变栅范围内的平均应
第二章电阻应变式传感器
R
线性,灵敏度*4
9 05:14
2018/10/6
恒流源电桥补偿法: 全等臂电桥,恒流源,单臂工作:
' U 0 I
R3R1 RR1 I R1 R2 R3 R4 R1 4 R R1 U 0 I
非线性
近似线性:
R3R1 IR R1 R1 R2 R3 R4 4 R
7
相对桥臂相加 相邻桥臂相减
U R1 05:14 4 R 1
2018/10/6
单臂工作:R1-应变片,R2-补偿片,R3、R4固定电阻
U 0
(2) 交流电桥: 原理:相同 ; 输入输出:直流 平衡条件: Z1Z3 Z2 Z4
Z ze j
交流, 电阻
阻抗
z1z3 z2 z4
平衡 输出 C1R4 C2 R3
H K y / Kx
横向效应系数
2018/10/6 5 05:14
机械滞后: 粘接 --- 过热/过载 残余变形 蠕变和零漂: 粘接 内应力
不重合
预载/重复加载
滑移
固化,增大弹性膜量
应变极限:非线性误差达到10%的应变值,过载能力
(2) 动态特性: 力传导:机械应变
基底
胶层
敏感栅
滞后
正弦响应:幅值降低
非线性误差:
' U0 U0 IRR1 /(4 R) IRR1 /(4 R R1 ) R1 / R1 eL ' U0 IRR1 /(4 R R1 ) 4 R1 / R1
(4) 电桥的温度效应及其补偿: 温度效应:标准状态(t=20C,p=760mmHg,f=10mmHg),(理想) 实际温度:偏差 --- 特性改变 --- 输出改变
线性,灵敏度*4
9 05:14
2018/10/6
恒流源电桥补偿法: 全等臂电桥,恒流源,单臂工作:
' U 0 I
R3R1 RR1 I R1 R2 R3 R4 R1 4 R R1 U 0 I
非线性
近似线性:
R3R1 IR R1 R1 R2 R3 R4 4 R
7
相对桥臂相加 相邻桥臂相减
U R1 05:14 4 R 1
2018/10/6
单臂工作:R1-应变片,R2-补偿片,R3、R4固定电阻
U 0
(2) 交流电桥: 原理:相同 ; 输入输出:直流 平衡条件: Z1Z3 Z2 Z4
Z ze j
交流, 电阻
阻抗
z1z3 z2 z4
平衡 输出 C1R4 C2 R3
H K y / Kx
横向效应系数
2018/10/6 5 05:14
机械滞后: 粘接 --- 过热/过载 残余变形 蠕变和零漂: 粘接 内应力
不重合
预载/重复加载
滑移
固化,增大弹性膜量
应变极限:非线性误差达到10%的应变值,过载能力
(2) 动态特性: 力传导:机械应变
基底
胶层
敏感栅
滞后
正弦响应:幅值降低
非线性误差:
' U0 U0 IRR1 /(4 R) IRR1 /(4 R R1 ) R1 / R1 eL ' U0 IRR1 /(4 R R1 ) 4 R1 / R1
(4) 电桥的温度效应及其补偿: 温度效应:标准状态(t=20C,p=760mmHg,f=10mmHg),(理想) 实际温度:偏差 --- 特性改变 --- 输出改变
传感器原理及应用(第3版) 王华翔 第2章 应变式传感器
(1)单丝自补偿;
热输出
R R t
t
K
e
g
t
为达到温度补偿的目的,在温度变化 Δt时,必须使
t K(e g ) 0
t K(g e)
试件的线膨胀系数 e 为确定值。可以选用电阻温度系 数 t 和线膨胀系数 g 满足上式条件,即可实现 温度自补偿。具有这种敏感栅的应变片称为单丝自补偿 应变片。
Ug
E 4
R R
E 4
K
假设 Ri R 导致的误差是多少? 从原始公式推导
Ug
ER 4R 2R
E 4
R R
1
1 2
R R
1
E 4
K
(1
1 2
1
K
)
线性项
级数展开
非线性项
Ug
E 4
K
1
1 2
K
1 K 2
4
1 K 3
8
相对非线性误差= 第1个非线性项 线性项
1 K 0.01, K 2
Ra
Ra Ra
t
Rb
Rb Rb
t
Ra Rb
Rb Rb
t
Ra Ra
t
t t
K b e K a e
b a
调整两段敏感丝长短,可以达到很好的补偿作用。
(3)桥路补偿法
测量应变时,使用两个应变片,一片贴在被测试件的表面 ,称为工作应变片。另一片贴在与被测试件材料相同的补 偿块上,称为补偿应变片。在工作过程中补偿块不承受应 变,仅随温度发生变形。
R2
构件受弯 曲应力
构件受单向应力
U sc AR1 R1t R1 K R4 R2 R2t R2 K R3
第2章应变式传感器

1. 温度效应及误差
用作测量应变的金属应变片,希望其阻值仅随应变变化,而
不受其它因素的影响。实际上应变片的阻值受环境温度(包括
被测试件温度)影响很大。因环境温度改变而引起电阻变化的
两个主要因素: 其一是应变片的电阻丝具有一定温度系数; 其二是电阻丝材料与测测试材料的线膨胀系数不同。
由于测量现场环境温度的改变而给测量带来的附加误差,称为
电阻率变化 形 变
(1 2) c(1 2) K
K (1 2 ) c(1 2 )
K为金属材料的应变灵敏度系数 电阻率变为几何参数再联系应变和固有参数
R d (1 2 ) R
电阻的变化由两部分组成: 一是应变片受力后材料由形变引起的变化,即1+2μ
机械应变的比值应当不变,即加载、卸载过程中的灵敏系数应一致,
差值即为机械滞后。
指 示 应 变εi
卸载
Δε
加载
机械应变ε
ε
产生原因:应变片在承受机械应变后的残余变形,使敏感栅
电阻发生少量不可逆变化;在制造或粘贴应变片时,敏感栅受
到的不适当的变形或粘结剂固化不充分等。 机械滞后值还与应变片所承受的应变量有关,加载时的机械 应变愈大,卸载时的滞后也愈大。所以,通常在实验之前应将 试件预先加、卸载若干次,以减少因机械滞后所产生的实验误
基底用于保持敏感栅、引线的几何形状和相对位置,盖片既保 持敏感栅和引线的形状和相对位置,还可保护敏感栅。最早的基底 和盖片多用专门的薄纸制成。基底厚度一般为0.02~0.04mm,基底 的全长称为基底长,其宽度称为基底宽。
3. 粘结剂
用于将敏感栅固定于基底上,并将盖片与基底粘贴在一起。
使用金属应变片时,也需用粘结剂将应变片基底粘贴在构件表面 某个方向和位置上,以便将构件受力后的表面应变传递给应变计的 基底和敏感栅。 常用的粘结剂分为有机和无机两大类。有机粘结剂用于低温、常 温和中温。常用有聚丙烯酸酯、酚醛树脂、有机硅树脂,聚酰亚胺 等。无机粘结剂用于高温,常用的有磷酸盐、硅酸盐、硼酸盐等。 4. 引线 它是从应变片的敏感栅中引出的金属线。常用直径约0.8~0.15mm 的镀锡铜线,或扁带形的其它金属材料制成。对引线材料的性能要 求为电阻率低、电阻温度系数小、抗氧化性能好、易于焊接。大多 数敏感栅材料都可制作引线。
用作测量应变的金属应变片,希望其阻值仅随应变变化,而
不受其它因素的影响。实际上应变片的阻值受环境温度(包括
被测试件温度)影响很大。因环境温度改变而引起电阻变化的
两个主要因素: 其一是应变片的电阻丝具有一定温度系数; 其二是电阻丝材料与测测试材料的线膨胀系数不同。
由于测量现场环境温度的改变而给测量带来的附加误差,称为
电阻率变化 形 变
(1 2) c(1 2) K
K (1 2 ) c(1 2 )
K为金属材料的应变灵敏度系数 电阻率变为几何参数再联系应变和固有参数
R d (1 2 ) R
电阻的变化由两部分组成: 一是应变片受力后材料由形变引起的变化,即1+2μ
机械应变的比值应当不变,即加载、卸载过程中的灵敏系数应一致,
差值即为机械滞后。
指 示 应 变εi
卸载
Δε
加载
机械应变ε
ε
产生原因:应变片在承受机械应变后的残余变形,使敏感栅
电阻发生少量不可逆变化;在制造或粘贴应变片时,敏感栅受
到的不适当的变形或粘结剂固化不充分等。 机械滞后值还与应变片所承受的应变量有关,加载时的机械 应变愈大,卸载时的滞后也愈大。所以,通常在实验之前应将 试件预先加、卸载若干次,以减少因机械滞后所产生的实验误
基底用于保持敏感栅、引线的几何形状和相对位置,盖片既保 持敏感栅和引线的形状和相对位置,还可保护敏感栅。最早的基底 和盖片多用专门的薄纸制成。基底厚度一般为0.02~0.04mm,基底 的全长称为基底长,其宽度称为基底宽。
3. 粘结剂
用于将敏感栅固定于基底上,并将盖片与基底粘贴在一起。
使用金属应变片时,也需用粘结剂将应变片基底粘贴在构件表面 某个方向和位置上,以便将构件受力后的表面应变传递给应变计的 基底和敏感栅。 常用的粘结剂分为有机和无机两大类。有机粘结剂用于低温、常 温和中温。常用有聚丙烯酸酯、酚醛树脂、有机硅树脂,聚酰亚胺 等。无机粘结剂用于高温,常用的有磷酸盐、硅酸盐、硼酸盐等。 4. 引线 它是从应变片的敏感栅中引出的金属线。常用直径约0.8~0.15mm 的镀锡铜线,或扁带形的其它金属材料制成。对引线材料的性能要 求为电阻率低、电阻温度系数小、抗氧化性能好、易于焊接。大多 数敏感栅材料都可制作引线。
第2章 应变传感器

RL
U0
-
R3
D
R4
输出电压为:
电压灵敏度为:
U0= E
R1
U0= E
应变式传感器的应用
一 应变式力传感器
柱(筒)式力传感器
作为各种电子秤与材料试验机的测力元件、发动机的推 力测试、水坝坝体承载状况监测
应变片粘贴要求: 应变片粘贴在弹性体外壁应力分布均匀的中间部分, 对称粘贴多片。 应变片接线要求: 采用电桥连接方式,横向粘贴的应变片起温度补偿的作用。
E——试件材料的弹性模量。
由此可知, 应力值σ正比于应变ε, 而试件应变ε正比于电阻
值的变化, 所以应力σ正比于电阻值的变化, 这就是利用应变片 测量应变的基本原理。
二
应变片特性
金属电阻应变片 电阻应变片的种类 半导体电阻应变片 金属应变片组成 敏感栅、 基片、 覆盖层和引线等部分 敏感栅是应变片的核心部分, 它粘贴在绝缘的基片上, 其
测量流动介质的动态和静态 压力,如动力管道设备的进 出口气体或液体的压力、 发动机内部的压力、枪管及 炮管内部的压力、内燃机管 道的压力
R1R4切向粘贴, R2R3在边缘处径向 粘贴构成全桥电路
三
应变式容器内液体重量传感器
微压传感器
电阻应变片
传压杆
感压膜 h
可以测量容器内储存 的溶液重量及液位。
当容器中溶液增多时,感压膜感受的压力就增大,将其 上两个传感器Rt的电桥接成正向串接的双电桥电路。 输出电压为:
4力敏荷重传感器
5支点;6减速电机;7环行皮带;8料仓。
通过放大器将测得的毫伏信号放大,再送入调 节器,与物料流量给定值进行比较后,通过控制装 置去自动调节给料机的给料量。当实测流量低时, 调节器使给料机增加给料量,直至实际流量与给定 流量相等,调节器就保持不变,反之亦然。依次循 环,达到了物料连续计量与自动调节给料量的目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(Ra)t Ra(aK(ea) )t
于是有
(Rb)t Rb(bK(eb) )t
Ra(aK(ea))1 Rb(bK(eb))
2020/5/5
即
Ra bK(eb) Rb aK(ea)
通过选择两种敏感栅的电阻,使之符合上式。即可实 现温度补偿。
2020/5/5
(3)电路补偿 采用电桥电路和双应变片可以补偿温度误差。如图
2020/5/5
2.1 金属应变式传感器
特点:精度高、量程大;频响好;结构简单;环境适 应性强;易于小型化和固态化;价格低廉、品种多。
一、应变概念 应变:构件内任一点处的变形程度。应变又可分为线
应变 和切应变 ,均为无量纲量。
线应变 表示变形前构件内任一点处的一条微线段, 变形后的长度改变量与其原始长度之比。
应变式传感器包括两部份,一是弹性敏感元件,将被 测量转换为应变;二是应变片,将应变转化为电阻 的变化。
被测量
应变量
弹性元件
电阻
应变片
变化
2020/5/5
(一)柱式压力传感器 圆柱式压力传感器分为实心和空心两种。
2020/5/5
2020/5/5Leabharlann 柱式力传感器应变片的粘贴方式
对于柱式压力传感器其轴向应变和圆周方向应变与轴 向受力成正比例关系。
应变波波长为 ,应变栅长为 l 时,时刻 t 应变
因沿而构应件变的片分中布点为的应(x变)为0sin2x
t
0
sin2
xt
2020/5/5
2020/5/5
应变片测得的应变为栅长 l 范围内的平均应变 m ,
其数值为
m1lxxtt 2 2ll 0sin2xdxt0sin2xt sin ll
平均应变 m 与中点应变 t 之相对误差
(eg)t
2020/5/5
相应的电阻变化为
R R2
K(e
g)t
因此总的电阻变化为
R R t R R 1 R R 2 t t K (e g) t
等价的虚假应变
t R R t K K t (eg) t
2020/5/5
2.温度补偿 (1)单丝自补偿应变片 要补偿温度带来的虚假应变,由上式可看出,只需
1.温度误差 温度引起应变片的电阻变化有两个因素:其一是应变
片的电阻丝具有一定的温度系数,其二是电阻丝材 料与测试工件的线膨胀系数不同引起附加应变。
设工件温度变化为t ,敏感栅材料的电阻温度系数 为 t ,则应变片产生的电阻相对变化为
由于敏感栅材料与被测RR构1件的线t膨t 胀系数不同,引起
的附加应变
是
RR 1 R
Ug
I
4RR
4I1R
4R
2020/5/5
2020/5/5
I1 I2
I
恒流供电电桥
(五)电桥桥臂比与电桥灵敏度 根据前面电桥输出公司,令
n R2 R4 R1 R3
n称为电桥的桥臂比,得
R4 R Ug E1RR1 R3R R12R11R R34E(1nn2)RR1
2020/5/5
定义电桥灵敏度
2020/5/5
(三)主要特性
1.灵敏度系数
标称灵敏度系数
K R
R
K恒小于 K S ,引起原因:胶层传递变形失真和横
向效应。
2.横向效应
金属应变片受横向应变影响引起电阻变化的现象称为 横向效应。
下面分析横向效应产生的原因。设轴向应变为 ,
横向应变为 r 。
2020/5/5
2019.9.11 JC204->
2020/5/5
当均匀的压力作用于圆形的薄板时,圆板上任一点的 应变值为
r
3P 8h2E
(1
2
)(r2
3x2)
t
3P 8h2E
(1
2)(r2
x2)
r , t 为切向和径向应变。由上式可以看出:
(1)边缘处切向应变为0,径向应变最大;
(2)中心处径向应变与切向应变相等,切向应变最大;
(3)在 x r 3 时,径向应变为0。
1.敏感栅 敏感栅细丝直径一般为0.015~0.05mm。电阻值为
60Ω、120 Ω、200 Ω等规格。栅长有100mm、 200mm、1mm、0.5mm、0.2mm等规格。 2.基底和盖片 对于基底要求能可靠地传递应变。 3.粘结剂 粘结剂用于将敏感栅规定到基底上并将盖片与基底粘 结在一起。 使用应变片时还须将应变片粘结到构件表面。 4.引线 电阻率低、电阻温度系数小、易于焊接、抗氧化。
KuUg RR 1 E(1nn2)
由上式看出,电桥灵敏度是桥臂比的函数,下面分析 桥臂比为何值时电桥灵敏度最大。令
dK u 0
得
dn
(1 (1
n2) n)4
0
n 1 时,即第一对称电桥电桥灵敏度最大。
2020/5/5
四、应变传感器
金属应变片除了测定试件应力、应变外,还可知制造 成多种应变式传感器,用于测量力、扭矩、加速度、 压力等其他物理量。
Ug
(RR)R' RR'
E
(2RR)(2R')
E
R
E
R1
1
R1
4RR 4 R 2 R
2020/5/5
2019.9.15 JC204->
1.第一对称电桥
2020/5/5
2.第二对称电桥
(三)第二对称电桥 若电桥桥臂两两相等,即
R 1R 3R , R 2R 4R ' 则称为第二对称电桥。设 R 1 有一增量 R ,则输出
变化,这一变化称为零点漂移。 蠕变指应变片受恒定应变和恒温的条件下,输出随时
间变化的现象。 5.应变极限 应变测量值与真实值 误差小于10%的最大 应变范围。
2020/5/5
6.动态特性
由于应变片很薄,构件应变波传到应变片的时间很短
(约200nS),因此只考虑应变沿应变片纵向传播 时的动态响应。
设一频率为 f 的正弦应变波在构件中以速度 v 沿应 变片纵向传播,在某时刻 t 应变量分布如图。
2020/5/5
2020/5/5
用于圆板的应变片 圆板表面应力分布图
2.筒式应变压力传感器 筒式应变压力传感器结构如下图。
2020/5/5
2020/5/5
应变片敏感栅总的变形为
L L 1 L 2 2 n ( l n 2 1 )r (n 2 1 )r
设敏感栅的总长为 L,敏感栅的灵敏度系数为 K
则电阻的相对变化为
,
s
R L R KS L
2nl(n1)r
2L
KS
(n1) 2L
KSr
2020/5/5
令
通常电桥输出都是接运放差动输入,负载电阻可以 近似为无穷大,输出电流为零。 输出
Ug E R1R4 R2R3
(R1 R2)(R3 R4)
2020/5/5
设 R 1 为应变片,受应变时电阻改变为R ,则输出 UgE(R (1R 1 R R)R R 24 ) R (R 32 R R 34)
当金属丝受拉力后金属丝伸长,同时金属丝截面变小。 对上面公式微分:
dR ldd ll dS
上式两边同除以 S得: S
S2
R
上式中:
dRddldS Rl S
dl ,
l
dS d(r2)
S
r2
2drr2r
2020/5/5
根据泊松效应,有
r
上式中 为泊松系数。
由实验结果有
d C dV V
通常 C 1 由于 VSl
切应变 表示过构件内任一点的两个互相垂直的微
线段,变形后两个微线段的角度改变量。
2020/5/5
Y
L
L L L
F
O 1. 线应变
XO
F
X
2.切应变
2020/5/5
二、金属丝式应变片 (一)应变效应
设长度为 l 、截面积为 S 、电阻率为 的金属丝,
其电阻为
R l
S
l
l
r
S
F
2020/5/5
t
m t
1m t
sinl
1
l
2020/5/5
从上式可看出 随 l 减少而减小。当 l 在0.1 到0.05时, 将小于2% 。考虑
取 l 0.1,则
v f
f 0.1 v l
若已知应变波传播速度,由上式可以计算出栅长为 l
的应变片可测动态应变的最高频率。
2020/5/5
(四)温度误差及其补偿
6Fl bh 2 E
等截面梁其应变随距受力点的距离变化而变化,等强
度梁各处的应变相同。
除了上面的梁式传感器外还有其它形式的梁式传感器。 参见下面图。
2020/5/5
2020/5/5
各种梁式传感器
(三)应变式压力传感器 1.膜式应变压力传感器 测量气体或液体压力(压强)的膜式压力传感器结构
如下图。
U gE 4K 1 1 2K 1 4(K )2 8 1(K )3
2020/5/5
电桥的非线性相对误差
E 4
K
Ug
E K
4
1 K 1 (K )2 1 (K )3
24
8
取
1 K
2
2020/5/5
(二)第一对称电桥
若电桥桥臂两两相等,即
R 1R 2R , R 3R 4R ' 则称为第一对称电桥。设 R 1 有一增量 R ,则输出
UgE(R( R R R)RR')' (RRR R ' ') 令 k R R' 得
U gE R Rk211k11 kk R R1
于是有
(Rb)t Rb(bK(eb) )t
Ra(aK(ea))1 Rb(bK(eb))
2020/5/5
即
Ra bK(eb) Rb aK(ea)
通过选择两种敏感栅的电阻,使之符合上式。即可实 现温度补偿。
2020/5/5
(3)电路补偿 采用电桥电路和双应变片可以补偿温度误差。如图
2020/5/5
2.1 金属应变式传感器
特点:精度高、量程大;频响好;结构简单;环境适 应性强;易于小型化和固态化;价格低廉、品种多。
一、应变概念 应变:构件内任一点处的变形程度。应变又可分为线
应变 和切应变 ,均为无量纲量。
线应变 表示变形前构件内任一点处的一条微线段, 变形后的长度改变量与其原始长度之比。
应变式传感器包括两部份,一是弹性敏感元件,将被 测量转换为应变;二是应变片,将应变转化为电阻 的变化。
被测量
应变量
弹性元件
电阻
应变片
变化
2020/5/5
(一)柱式压力传感器 圆柱式压力传感器分为实心和空心两种。
2020/5/5
2020/5/5Leabharlann 柱式力传感器应变片的粘贴方式
对于柱式压力传感器其轴向应变和圆周方向应变与轴 向受力成正比例关系。
应变波波长为 ,应变栅长为 l 时,时刻 t 应变
因沿而构应件变的片分中布点为的应(x变)为0sin2x
t
0
sin2
xt
2020/5/5
2020/5/5
应变片测得的应变为栅长 l 范围内的平均应变 m ,
其数值为
m1lxxtt 2 2ll 0sin2xdxt0sin2xt sin ll
平均应变 m 与中点应变 t 之相对误差
(eg)t
2020/5/5
相应的电阻变化为
R R2
K(e
g)t
因此总的电阻变化为
R R t R R 1 R R 2 t t K (e g) t
等价的虚假应变
t R R t K K t (eg) t
2020/5/5
2.温度补偿 (1)单丝自补偿应变片 要补偿温度带来的虚假应变,由上式可看出,只需
1.温度误差 温度引起应变片的电阻变化有两个因素:其一是应变
片的电阻丝具有一定的温度系数,其二是电阻丝材 料与测试工件的线膨胀系数不同引起附加应变。
设工件温度变化为t ,敏感栅材料的电阻温度系数 为 t ,则应变片产生的电阻相对变化为
由于敏感栅材料与被测RR构1件的线t膨t 胀系数不同,引起
的附加应变
是
RR 1 R
Ug
I
4RR
4I1R
4R
2020/5/5
2020/5/5
I1 I2
I
恒流供电电桥
(五)电桥桥臂比与电桥灵敏度 根据前面电桥输出公司,令
n R2 R4 R1 R3
n称为电桥的桥臂比,得
R4 R Ug E1RR1 R3R R12R11R R34E(1nn2)RR1
2020/5/5
定义电桥灵敏度
2020/5/5
(三)主要特性
1.灵敏度系数
标称灵敏度系数
K R
R
K恒小于 K S ,引起原因:胶层传递变形失真和横
向效应。
2.横向效应
金属应变片受横向应变影响引起电阻变化的现象称为 横向效应。
下面分析横向效应产生的原因。设轴向应变为 ,
横向应变为 r 。
2020/5/5
2019.9.11 JC204->
2020/5/5
当均匀的压力作用于圆形的薄板时,圆板上任一点的 应变值为
r
3P 8h2E
(1
2
)(r2
3x2)
t
3P 8h2E
(1
2)(r2
x2)
r , t 为切向和径向应变。由上式可以看出:
(1)边缘处切向应变为0,径向应变最大;
(2)中心处径向应变与切向应变相等,切向应变最大;
(3)在 x r 3 时,径向应变为0。
1.敏感栅 敏感栅细丝直径一般为0.015~0.05mm。电阻值为
60Ω、120 Ω、200 Ω等规格。栅长有100mm、 200mm、1mm、0.5mm、0.2mm等规格。 2.基底和盖片 对于基底要求能可靠地传递应变。 3.粘结剂 粘结剂用于将敏感栅规定到基底上并将盖片与基底粘 结在一起。 使用应变片时还须将应变片粘结到构件表面。 4.引线 电阻率低、电阻温度系数小、易于焊接、抗氧化。
KuUg RR 1 E(1nn2)
由上式看出,电桥灵敏度是桥臂比的函数,下面分析 桥臂比为何值时电桥灵敏度最大。令
dK u 0
得
dn
(1 (1
n2) n)4
0
n 1 时,即第一对称电桥电桥灵敏度最大。
2020/5/5
四、应变传感器
金属应变片除了测定试件应力、应变外,还可知制造 成多种应变式传感器,用于测量力、扭矩、加速度、 压力等其他物理量。
Ug
(RR)R' RR'
E
(2RR)(2R')
E
R
E
R1
1
R1
4RR 4 R 2 R
2020/5/5
2019.9.15 JC204->
1.第一对称电桥
2020/5/5
2.第二对称电桥
(三)第二对称电桥 若电桥桥臂两两相等,即
R 1R 3R , R 2R 4R ' 则称为第二对称电桥。设 R 1 有一增量 R ,则输出
变化,这一变化称为零点漂移。 蠕变指应变片受恒定应变和恒温的条件下,输出随时
间变化的现象。 5.应变极限 应变测量值与真实值 误差小于10%的最大 应变范围。
2020/5/5
6.动态特性
由于应变片很薄,构件应变波传到应变片的时间很短
(约200nS),因此只考虑应变沿应变片纵向传播 时的动态响应。
设一频率为 f 的正弦应变波在构件中以速度 v 沿应 变片纵向传播,在某时刻 t 应变量分布如图。
2020/5/5
2020/5/5
用于圆板的应变片 圆板表面应力分布图
2.筒式应变压力传感器 筒式应变压力传感器结构如下图。
2020/5/5
2020/5/5
应变片敏感栅总的变形为
L L 1 L 2 2 n ( l n 2 1 )r (n 2 1 )r
设敏感栅的总长为 L,敏感栅的灵敏度系数为 K
则电阻的相对变化为
,
s
R L R KS L
2nl(n1)r
2L
KS
(n1) 2L
KSr
2020/5/5
令
通常电桥输出都是接运放差动输入,负载电阻可以 近似为无穷大,输出电流为零。 输出
Ug E R1R4 R2R3
(R1 R2)(R3 R4)
2020/5/5
设 R 1 为应变片,受应变时电阻改变为R ,则输出 UgE(R (1R 1 R R)R R 24 ) R (R 32 R R 34)
当金属丝受拉力后金属丝伸长,同时金属丝截面变小。 对上面公式微分:
dR ldd ll dS
上式两边同除以 S得: S
S2
R
上式中:
dRddldS Rl S
dl ,
l
dS d(r2)
S
r2
2drr2r
2020/5/5
根据泊松效应,有
r
上式中 为泊松系数。
由实验结果有
d C dV V
通常 C 1 由于 VSl
切应变 表示过构件内任一点的两个互相垂直的微
线段,变形后两个微线段的角度改变量。
2020/5/5
Y
L
L L L
F
O 1. 线应变
XO
F
X
2.切应变
2020/5/5
二、金属丝式应变片 (一)应变效应
设长度为 l 、截面积为 S 、电阻率为 的金属丝,
其电阻为
R l
S
l
l
r
S
F
2020/5/5
t
m t
1m t
sinl
1
l
2020/5/5
从上式可看出 随 l 减少而减小。当 l 在0.1 到0.05时, 将小于2% 。考虑
取 l 0.1,则
v f
f 0.1 v l
若已知应变波传播速度,由上式可以计算出栅长为 l
的应变片可测动态应变的最高频率。
2020/5/5
(四)温度误差及其补偿
6Fl bh 2 E
等截面梁其应变随距受力点的距离变化而变化,等强
度梁各处的应变相同。
除了上面的梁式传感器外还有其它形式的梁式传感器。 参见下面图。
2020/5/5
2020/5/5
各种梁式传感器
(三)应变式压力传感器 1.膜式应变压力传感器 测量气体或液体压力(压强)的膜式压力传感器结构
如下图。
U gE 4K 1 1 2K 1 4(K )2 8 1(K )3
2020/5/5
电桥的非线性相对误差
E 4
K
Ug
E K
4
1 K 1 (K )2 1 (K )3
24
8
取
1 K
2
2020/5/5
(二)第一对称电桥
若电桥桥臂两两相等,即
R 1R 2R , R 3R 4R ' 则称为第一对称电桥。设 R 1 有一增量 R ,则输出
UgE(R( R R R)RR')' (RRR R ' ') 令 k R R' 得
U gE R Rk211k11 kk R R1