平衡机最小可达剩余不平衡度emar
从业人员必知的平衡机的相关知识

从业人员必知的平衡机的相关知识1.动平衡机性能指标要素动平衡机的主要性能用最小可达剩余不平衡量,和不平衡量减少率两项综合指标表示。
前者是动平衡机能使转子达到的剩余不平衡量的最小值,它是衡量平衡机最高平衡能力的指标;后者是经过一次校正后所减少的不平衡量与初始不平衡量之比,它是衡量平衡效率的指标,一般用百分数表示。
同标准转子(标准工件)残留相同的不平衡量时使用。
曲轴等添加了活塞等的影响的方向必须残留不平衡量的转子。
事先记忆将标准工件的不平衡量进行补偿,能够制作出标准工件相同的工件来。
什么是偏心补偿,插入接合器(测试轴)进行平衡机测定的功能。
不管多么精密多么高的精度加工,接合器实际上或多或少都一点偏心。
另外,假如要制作没有偏心的接合器,把接合器安装到平衡机本体内时,以嵌入的公差分作偏心的安装的情况也有。
2.销子补偿功能的定义如果平衡机的减重率比较高,就可以用较少的转动次数完成平衡。
所有做动平衡的工件,都需要转动,或者被支承着旋转。
通过旋转,使工件中的不平衡量产生离心力引起摆架系统的振动,通过传感器将此机械振动量变成电信号,经滤波放大、锁相倍频、定标调整和平面分离等。
什么是动平衡机销子补偿(虚设重量补偿相同),测定转移最前端有销子的工件的时候,考虑到实用状态销子插入,在插入一半的销子的状态下进行不平衡测定的必要。
但是,测定的时候,插入半个销子的话,这样就增加作业工程量,导致作业效率恶化。
如果事前提出半个销子的不平衡影响,没有半个销子的状态下进行测定结果,补正这部分的影响得出来的结果与有半个销子的状态下测定的结果相同。
我们称为这个功能为销子补偿功能。
根据刚性转子可将其不平衡量简化至两个任意选择的校正平面上去的的原理和转子的振动方程可知:刚性转子的任一校正面有不平衡量,必然要在左右两个轴承上同时引起振动受力状态3.轮胎平衡检测原理汽车的车轮是由轮胎、轮毂组成的一个整体。
但由于制造上的原因,使整体各部分的质量分布不能非常均匀。
动平衡技术规范及操作指南
1.工件质量(包括平衡夹具)a.最小500Kgb.最大20000Kg2.每个支承座最大载荷10500Kg3.工件最大直径Φ2500mm4.工件轴径范围a.小滚轮组Φ50~Φ190mmb.中滚轮组Φ190~Φ300mmc.大滚轮组Φ300~Φ400mmd.大滚轮组Φ190~Φ300mm5.工件两支承间距离400~4400mm二、驱动主轴a.主轴电机:YVF2250M-4/B3 55KWb.平衡转速范围:100~1250r/min三、使用条件1.环境温度:-10~50℃2相对环境温度不超过85%3.电源:交流380V、50Hz,允许±10%的波动4.周围无强磁场及大的振动设备。
5.变速器型号:QJ五档系列变速器QJ805。
四、平衡精度1.最小可达剩余不平衡量:e mar≤0.4gmm/Kg2.不平衡量减少率:URR≥95%。
1.工件质量(包括平衡夹具)a.最小500Kgb.最大2000Kg2.每个支承座最大载荷1050Kg3.工件最大直径Φ1600mm4.工件轴径范围a.小滚轮组Φ15~Φ190mmb.中滚轮组Φ190~Φ290mm5.工件两支承间距离280~3100mm(圈带驱动)140~2250 mm(联轴节驱动)二、驱动a.联轴节驱动电机:YVF2180L-4/B3 22KWb.圈带驱动电机:YVF2180L-4/B5 22KWc.平衡转速范围:100~1200r/min三、使用条件1.环境温度:-10~50℃2相对环境温度不超过85%3.电源:交流380V、50Hz,允许±10%的波动4.周围无强磁场及大的振动设备。
四、平衡精度1.最小可达剩余不平衡量:e mar≤0.2gmm/Kg2.不平衡量减少率:URR≥95%。
操作指南1 安装参照系统接线图(图2),将彩色显视器插头、左右振动传感器插头、光电传感器插头和电源插头插好,一般情况下不需要变动。
打开整机电源,大约几秒钟后,屏幕上显示Window 的桌面,点击桌面上的平衡程序(飞机图标),出现下面的显示(图3)。
PHQ-160型硬平衡机说明书
JP PHQ-160型硬支承平衡机产品说明书上海剑平动平衡机制造有限公司感谢您使用上海剑平动平衡机制造有限公司的产品。
在使用本产品之前,请注意仔细阅读本说明书及有关附属说明书,并请注意下列事项:1.开箱验收:产品开箱验收时若发现产品、附件与装箱单不符,请来函与本公司联系。
2.安装使用:对使用说明书有关安装、环境、操作、调整等事项应事先了解清楚,避免造成事故。
在正常运输、安装、使用和保养条件下如发现产品制造质量问题,在规定期限内请与本厂联系。
3.安全事项:产品电器电压、电流、防护和报警等安全措施尤须注意。
4.在安装和使用过程中,如对本平衡机有什么要求,意见和建议,请与本厂咨询服务部门联系,我们将热忱地回答并解决你们生产使用中发生的一切问题。
谢谢!公司网址公司电话:+86-21-39971327公司传真:+86-21-39972165公司地址:上海市沪太路7488弄111号邮编:201809E-mail:**************目录一.平衡机的用途及适用范围二.平衡机的工作条件三.技术参数及主要技术性能指标四.主要结构概述五.硬支承平衡机的原理六.平衡机的吊运与安装七.操作与使用八.维护与保养九.故障与排除十.平衡词汇十一.平衡精度及精度计算附表. 典型刚性转子的平衡精度等级平衡机外型图支承架结构图传动系统结构图一.平衡机的用途与适用范围随着现代工业的发展。
消除机器的振动问题已日趋重要。
对于旋转机械(如电动机、鼓风机、柴油机、汽车等等)其旋转部件将直接影响到机器的效率,寿命和人身的安全。
因此平衡工艺被看成是绝对必要的。
本平衡机就是专门为旋转工件的平衡而设计生产的专用设备。
本平衡机是属于硬支承平衡机产品之一。
转子的支承采用H型支承架,具有支承刚度高、恢复力强、稳定性好的特点,机电转换器采用压力传感器,其特点是输入量较大、体积小、便于安装。
电测系统采用JP-380微机测试系统,转速、量值、相位全部用数字显示,转子的6种类型可任选,显示直观,并能记忆显示量,不平衡量直接以“g”显示。
动平衡技术要求规范及操作指南设计
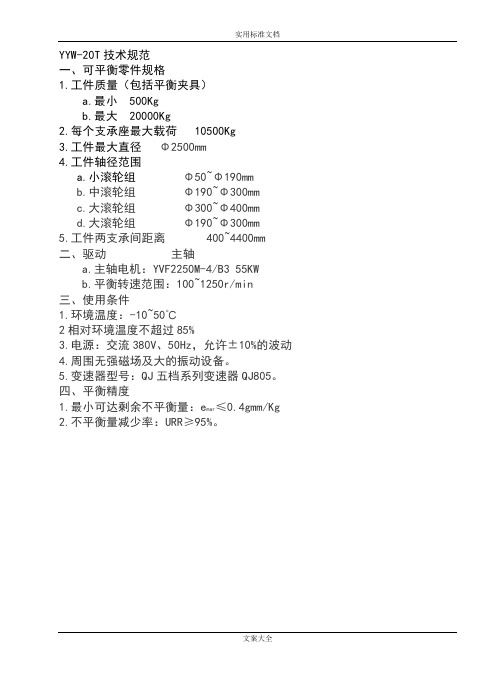
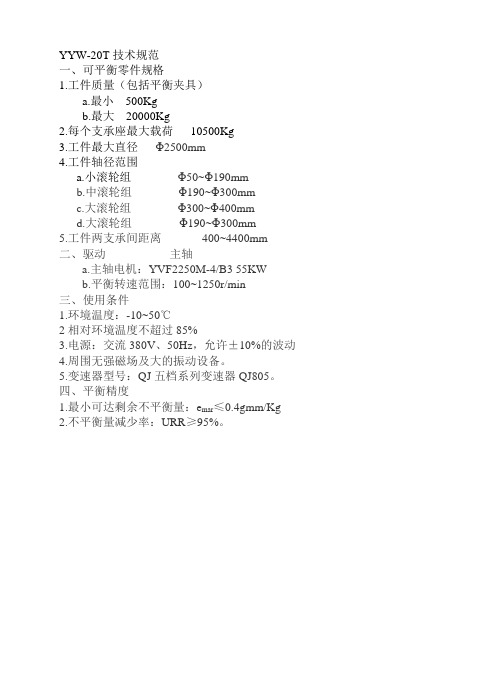
实用标准文档YYW-20T技术规范一、可平衡零件规格1.工件质量(包括平衡夹具)a.最小 500Kgb.最大 20000Kg2.每个支承座最大载荷 10500Kg3.工件最大直径Φ2500mm4.工件轴径范围a.小滚轮组Φ50~Φ190mmb.中滚轮组Φ190~Φ300mmc.大滚轮组Φ300~Φ400mmd.大滚轮组Φ190~Φ300mm5.工件两支承间距离 400~4400mm二、驱动主轴a.主轴电机:YVF2250M-4/B3 55KWb.平衡转速范围:100~1250r/min三、使用条件1.环境温度:-10~50℃2相对环境温度不超过85%3.电源:交流380V、50Hz,允许±10%的波动4.周围无强磁场及大的振动设备。
5.变速器型号:QJ五档系列变速器QJ805。
四、平衡精度1.最小可达剩余不平衡量:e mar≤0.4gmm/Kg2.不平衡量减少率:URR≥95%。
YYH-2000技术规范一、可平衡零件规格1.工件质量(包括平衡夹具)a.最小 500Kgb.最大 2000Kg2.每个支承座最大载荷 1050Kg3.工件最大直径Φ1600mm4.工件轴径范围a.小滚轮组Φ15~Φ190mmb.中滚轮组Φ190~Φ290mm5.工件两支承间距离 280~3100mm(圈带驱动)140~2250 mm(联轴节驱动)二、驱动a.联轴节驱动电机:YVF2180L-4/B3 22KWb.圈带驱动电机:YVF2180L-4/B5 22KWc.平衡转速范围:100~1200r/min三、使用条件1.环境温度:-10~50℃2相对环境温度不超过85%3.电源:交流380V、50Hz,允许±10%的波动4.周围无强磁场及大的振动设备。
四、平衡精度1.最小可达剩余不平衡量:e mar≤0.2gmm/Kg2.不平衡量减少率:URR≥95%。
操作指南1 安装参照系统接线图(图2),将彩色显视器插头、左右振动传感器插头、光电传感器插头和电源插头插好,一般情况下不需要变动。
刚性转动零件的静平衡与动平衡试验的概述

C=(G式中:G转子的重量(公斤)转子的重心对旋转轴线的偏心量(毫米)转子的转速(转/分) 转子的角速度(弧度/秒)g ——重力加速度9800(毫米/秒2)由上式可知,当重型或高转速的转子,即使具有很小的偏心量,也会引起非常大的不平衡的离心力,.所以零件在加工和装配时,转子必须进行平衡.所示.当转子旋转时,将产生不平衡的离心力.,且相交于转子的重心上,即转子重心在旋转轴线上,如图1b 所示.这时转子虽处于平衡状态,但转子旋转时将产生一不平衡力矩.静动不平衡—一大多数情况下,转子既存在静不平衡,又存在动不平衡,这种情况称静动不平衡.即转子的主惯性轴与旋转轴线既不重合,又不平行,而相交于转子旋转轴线中非重心的任何一点,如图1c 所示.当转子旋转时,将产生一个不平衡的离心力和一个力矩 .1.2.4转子静不平衡只须在一个平面上(即校正平面)安放一个平衡重量,就可以使转子达到平衡,故又称单面平衡.平面的重量的数值和位置 ,在转子静力状态下确定,即将转子的轴颈放置在水平转子动不平衡及静动不平衡必须在垂直于旋转轴的二个平面 (即校正平面)内各加一个平衡重量,使 转子达到平衡.平面的重量的数值和位置,必须在转子旋转情况下确定,这种方法叫动平衡.因需两个 平面作平衡校正,故又称双面平衡刚性转子只须作低速动平衡试验,其平衡转速一般选用第一临界转速的1/3以下。
转子不平衡产生的原因:设计与制图的误差 . 材料的缺陷I . 加工与装配的误差.转子不平衡产生的不良效应:会对轴承、支架、基体产生作用力 .引起振动.但不平衡与质量分布,机架的刚度有关,所以转子不平衡不一定就会产生振动 不平衡影响大于力矩不平衡的影响.般的说来,静刚性转动零件的静平衡与动平衡试验的概述1.基本概念:不平衡离心力基本公式:具有一定转速的刚性转动件 (或称转子),由于材料组织不均匀、加工外形的误差、装配误差以及 (如键槽)等原因,使通过转子重心的主惯性轴与旋转轴线不相重合 ,因而旋转时,转 ,其值由下式计算:结构形状局部不对称 子产生不平衡离心力般选取的范围:当转子厚度5与外径D 之比(5/ D ) W 时(盘状转子),需要作平衡试验的,不轮 其工作转速高低,都只需进行静平衡.当转子厚度5 (或长度)与外径D 之比(5 /D ) >1时(辊筒类转子),只要转子的转速> 1000转/分, 都要进行动平衡.当转子厚度5与外径D 之比(5 / D )在一1时和当转子厚度 5与外径D 之比(5 /D ) >1而转子 的转速V1000转/分时,需根据转子的重量;使用功能;制造工艺;加工情况(部分加工还是全部加 工)及轴承的距离等因素,来确定是否需要进行动平衡还是静平衡转速度较低的转子零件,设计需要作平衡试验的,一般只按排作静平衡.按图表选择:(见图2)图2表示平衡的应用范围.下一条线以下的转子只需进行静平衡 ,上斜线以上的转子必须进行 动平衡,两斜线之间的转子须根据转子的重量;使用功能;制造工艺;加工情况(部分加工还是全部加工)及轴承的距离等因素,来确定是否需要进行动平衡还是静平衡 .一般不重要部位使用的零件旋转速度较低的转子零件,设计需要作平衡试验的,一般只按排作静平衡.2.动平衡与静平衡的选择: 般不重要部位使用的零件,旋3.许用不平衡量的确定:许用不平衡量的表示方法:评价转子不平衡大小在图纸上可以用许用不平衡力矩表示,即转子重量与许用偏心距的乘积,单位为克.毫米.也可用偏心距表示,单位为微米.1973 年国际标准化协会对于刚性转子相应不同平衡精度等级G的许用偏心距和各种具有代表性的旋转机械钢性转子应具有的精度等级分别表示在图3和表上.可供确定刚性转子许用不平衡量值的参考.静平衡(单面平衡)的许用不平衡力矩为:M=e< G (克/毫米)动平衡(双面平衡)的许用不平衡力矩为:M=1 /2(e X G)(克/毫米式中:e ――许用偏心距(毫米,见图G -------- 转子重量(克)3) 图三若转子用许用偏心距表示不平衡大小时,则静平衡的许用值可取图3中的全数值.而动平衡的校正平面许用值取图3中的数值的一半.(图3可参见附页图3放大图)许用不平衡量控制的误差如下:平衡精度等级~G16G1允许偏差± 15%± 30% ± 50%平衡精度的分类:1973年国际标准化ISO推荐”旋转刚性平衡精度”的判断标准中根据e®乘积为一常数,按倍阶比被分为下11等级,见下表1.个别转动件”所同类等级,可选择平衡精度同类等级为级 .再按工作速度60转/分,查对图3,但图3中级,最低速度为150转/分,故提高速度等级,按工作速度为150转/分进行查对,查得结果许用 偏心量为400卩m.注:1、若n 用转/分,用弧度/秒测定,则=2n/60"n/ 10 2 、指曲轴驱动件是一个组合件,包括曲轴、飞轮、离合器、皮带轮、减振器和连杆的转动部份等 3、指活塞速度低于9米/秒为低速柴油机发动机,活塞速度高于9米/秒为高速柴油机发动机4、发动机整机转子其重量包括注②所述的曲轴驱动件的全部重量.在外圆处许用静平衡配重值与平衡精度等级和工作转速度关系式 许用静平衡在外圆处配重值计算公式为:许用动平衡在外圆处配重值计算公式为:注:1)后面除2是动平衡的两个端面处的每一端面的动平衡许用配重值。
(整理)XN-280型动平衡机电测箱操作说明书.

XN-280 型双面平衡机电测箱操作说明书上海铉诺平衡仪器有限公司在使用本系统前应仔细阅读说明书的内容一须知1.1一般使用条件环境温度 0~+40℃环境湿度≦85%电源电压220VAC±10%连续工作方式无强腐蚀性气体或严重粉尘1.2主要技术指标最小可达剩余不平衡度emar≦参见平衡机说明书不平衡量一次减低率URR≧参见平衡机说明书测量时间 10S (启动停止时间除外)自动调整灵敏度六种支承模式预装量程自动转换10种转子数据储存1.3外部接线使用前,应仔细核对电源电压并安装好后面板连接件。
a)传感器1连1平面振动传感器b) 传感器2连2平面振动传感器c) 光电接光电传感器(部分机型连线内接)d) 电源输入与输出插座接插线e) 检查电源线是否接好并接通电源f) 配备性能良好的妆地线,接地电阻<0.5Ω1.4设备贮存及运输1.4.1应贮存防雨,通风,干燥的场地。
目录一概述1.1概念1.2微机控制特点1.2.1实时性1.2.2易操作性1.2.3高效率二结构2.1原理框图2.2主机2.3外部设备2.4数据系统三操作指南3.1操作流程3.2测平衡操作3.3测动平衡3.4 测平均值3.5 分量平衡3.6定标四设备维护一概述1.1概念1.1.1现代工业中为了减少旋转机械的振动,提高工作转速,延长工件使用寿命,必须消除旋转工件的动不平衡。
从四十年代的试凑法,五十年代电子管测量,七十年代晶体管测量,八十年代的小规模集成电路测量,九十年代进入微机测量领域。
由于采用了微机测量系统,才能使平衡机发展来了一个飞跃,采用微机系统后,能适应不同的旋转工件,品种、形状、重量、支承形式,能进行人机对话进行智能化操作。
解决了一般平衡机效率低,操作复杂等通病。
适应现代工业的管理和发展。
1.2微机控制特点1.2.1实时性1.2.1.1微机操作系统能迅速采样、处理、分检、工件的不平衡状况一般≦10S1.2.1.2简单的人机交互操作,迅速调用相应控制程序,框图,实现动态分析,贮存结果。
平衡精度等级及允许剩余不平衡量计算
平衡精度等级及允许剩余不平衡量计算平衡精度等级(Balance Accuracy Level)是指在计量领域中,衡量设备是否能够保持稳定、准确的工作状态的指标。
平衡精度等级一般用于衡量电子天平、秤等计量设备的性能。
而允许剩余不平衡量则是指在进行称量操作时,允许设备在一定范围内存在一定的误差。
平衡精度等级是通过进行一系列的实验测试来确定的,包括确定设备的最大量程、最小显示分度值、工作环境温度、湿度等因素。
根据这些数据,可以计算出设备的平衡精度等级。
平衡精度等级通常以“e”或“d”表示,如e=0.1g,表示设备的平衡精度等级为0.1g。
允许剩余不平衡量是指在进行称量操作时,设备存在一定的误差是可以接受的。
允许剩余不平衡量一般以设备的最小显示单位为单位进行计算。
例如,设备的最小显示单位为0.1g,允许剩余不平衡量为10g,则在进行称量操作时,设备的读数可以在10g的误差范围内波动。
计算允许剩余不平衡量的方法可以通过将平衡精度等级转化为最小显示单位来计算。
例如,如果设备的平衡精度等级为e=0.1g,而设备的最小显示单位为0.01g,则允许剩余不平衡量可以计算为0.1g/0.01g=10个最小显示单位。
允许剩余不平衡量的计算与设备的精度要求有关。
在一些应用中,对称量的要求比较严格,不允许存在较大的剩余不平衡量;而在一些应用中,对称量的要求相对较低,允许存在一定的剩余不平衡量。
根据国际计量组织(International Organization of Legal Metrology,OIML)的规定,不同类型的衡器设备有不同的平衡精度等级要求。
例如,OIML R76文档规定了电子天平的三个精确等级:Ⅲ级、Ⅱ级和Ⅰ级。
Ⅲ级精确等级适用于一般的商业和工业应用,Ⅱ级适用于较高的商业和工业应用,Ⅰ级适用于科学实验室和质量控制应用。
在实际应用中,选择合适的平衡精度等级和允许剩余不平衡量需要综合考虑多种因素,包括实际测量需求、预算限制、设备的可靠性和稳定性等。
SD220X现场平衡机说明书
SD220X型现场平衡仪电测系统操作说明书宣化新时代平衡机制造有限公司────在使用本系统前应仔细阅读本说明书的内容──前言转子平衡可采用两种方式:一是用平衡机平衡;另一种是在实际运行状态下平衡(称为现场平衡)。
后者考虑了各种因素对振动的影响且节省时间,多数的平衡问题均能通过这种方式解决,就现场平衡的方法而言,又分为测幅平衡和测相平衡。
测幅平衡只需要测量振动的大小,用周移法、三点法等方法进行计算。
这种方法比较简单,但精度低,启动次数多;测相平衡采用可同时测量振幅和相位的仪表。
平衡时首先在转子上加一个试验质量,通过加重前后振幅和相位的变化,计算校正质量的大小和方向。
这种方法精度高,启动次数少。
一般来说,震动产生的原因是很繁杂的,一般包括如基础的影响风道轴承松动和动平衡等等。
只要振动成分中基频占主导地位,就可以认定存在不平衡。
当转子的工作转速低于一阶临界转速,不平衡离心力较小,由此引起的挠曲变形小得可以忽略时称作刚性转子。
刚性转子存在两种形式的不平衡:静不平衡和力偶不平衡。
从理论上讲,用两个平面平衡可以同时消除这两种形式的不平衡。
柔性转子的平衡方为振型法。
所谓振型法是根据柔性转子的振动理论和振型函数的正交性,分别对转子的各阶振型进行平衡的一种挠性转子平衡方法。
Sd220x型平衡仪是一款既能检测刚性转子又能检测性挠性转子的测相平衡仪第一章一般介绍一技术条件1、一般使用条件环境温度 -10~+40℃环境湿度≤85% 电源电压180VAC~250VAC连续工作方式无强腐蚀性气体或严重粉尘2、主要技术指标最小可达剩余不平衡度 e m a r≤0.5g×mm/kg(配YYQ-100测振系统时)不平衡量一次减低率 URR≥ 90%配YYQ-100测振系统时)测量时间约10S 灵敏度调整自动3、外部接线下图是电测箱的后面板,正常使用前,应检查安装好以下接插件:a) 传感器1接插线b) 传感器2接插线c) 基准信号接插线d) 电源插座接插线e) 检查熔断器是否完好并接通电源检查接口f)现场平衡的测振传感器必须水平安装在离轴承最近的测振点上,测速度传感器水平或垂直安装必须跟被测转子同步,磁铁或光标所在位置为0度并且每旋转一周传感器上的黄灯只能亮一次。
动平衡机常用术语
动平衡机常用术语解释1.不平衡量转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。
它等于不平衡质量和其质心至转子轴线的乘积,不平衡量单位是gmm或者gcm,俗称“重径积”。
2.不平衡相位转子某平面上的不平衡质量相对于给定极坐标的角度值。
3.不平衡度转子单位质量的不平衡量,单位是gmm/kg。
在静不平衡时相当于转子的质量偏心距,单位为μm。
4.初始不平衡量。
平衡前转子上存在的不平衡量。
5.许用不平衡量为保证旋转机械正常工作所允许的转子剩余不平衡量。
该指标用不平衡度表示时,称为许用不平衡度(亦称许用不平衡率)。
6.剩余不平衡量平衡校正后转子上的剩余不平衡量。
7.校正半径校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。
8.校正平面的干扰(相互影响)在给定转子某一校正面上不平衡量的变化引起另一校正平面上平衡机指示值的改变(有时称为平面分离影响)9.转子平衡品质衡量转子平衡优劣程度的指标。
G=eperω/1000式中G-转子平衡品质,单位mm/s。
从G0.4-G4000分11级。
eper-转子允许的不平衡率gmm/kg或转子质量偏心距μmω-相应于转子最高工作转速的角速度=2πn/60≈n/10,n为转子的工作转速r/min10.转子单位质量的允许不平衡度(率)eper=G×1000/n/10 单位:gmm/kg或μm11.最小可达剩余不平衡量(Umar)最小可达剩余不平衡量(Umar)。
单位是gmm。
其意义是指平衡机能使转子达到的剩余不平衡量的最小值。
是衡量平衡机最高平衡能力的性能指标。
当该指标用不平衡度表示时,称为最小可达剩余不平衡度。
(单位gmm/kg)12.不平衡量减少率(URR)经过一次平衡校正所减少的不平衡量与初始不平衡量之比值。
它是衡量平衡机效率的性能指标,以百分数表示:URR(%)=(U1-U2)/U1=(1-U2/U1)×100式中:U1-初始不平衡量U2-一次平衡校正后的剩余不平衡量13.不平衡力偶干扰比单面平衡机抑止不平衡力偶影响的性能指标。
学习项目2安装调试机械主轴 任务4动平衡计算
FA FB F
因此
FA
FB
F 2
60N
练习题
1.一个风扇的不平衡质量为15g,求半径为300mm处不平衡量 是多少?
2.一个重30g的陀螺仪,允许的质量偏心是0.1微米,问允许 的剩余不平衡量是多少?如果校正半径是15毫米,请计算 允许的剩余不平衡质量。
平衡计算
• 例题1 1kg物体以半径1.5m、转速1000rpm旋转,求其离心力是多少?
• 解:
2n/ 60 n/10 1000/10 100rad / s F mr2 11.51002 15000N
平衡计算
• 例题2 不平衡质量m为24g,其作用半径为500mm,求其不平衡量是多少? • 解:
平衡计算
• 例题4
如果一个电机的电枢重量是5kg,允许的最大离心力是16N,零件
的质量偏心距是0.02mm,求允许的最大速度是多少?
• 解: U Me
F
U
n
2
10
n
2
F
16N
16N
10 Me 5kg 0.02mm 5kg 0.00002m
n 4000rpm
平衡计算
• 例题5
有一电机质量为10kg,质量中心的偏心距为0.07mm,转速 3000r/min,问是否达到G6.3级平衡等级? 按照G6.3平衡精度等 级,允许的电机偏心距是多少?
• 解:
M=10Kg,e=0.07mm,G=6.3,
n=3000rpm
e=10000G/n
许可偏心距e=0.021mm<0.07mm
平衡计算
• 例题6 一个600kg的转子,静不平衡量Us=12000gmm,转子以1000rpm 旋转时,求两个轴承上受力的大小。
平衡精度等级及允许剩余不平衡量计算
平衡精度等级及允许剩余不平衡量计算
平衡机精度等级
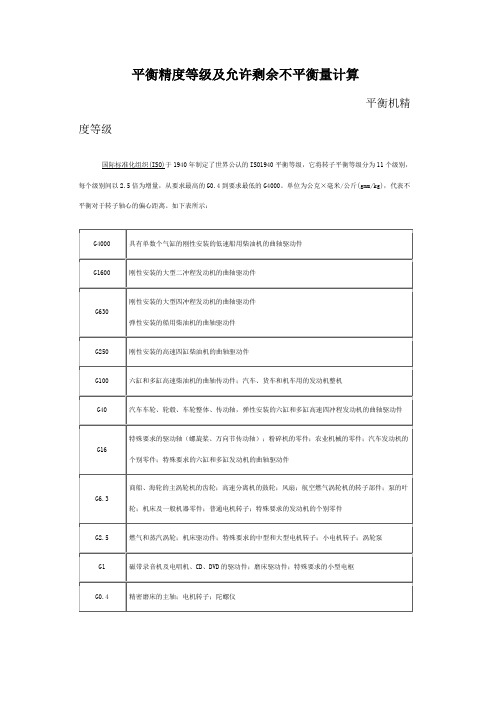
国际标准化组织(ISO)于1940年制定了世界公认的ISO1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以2.5倍为增量,从要求最高的G0.4到要求最低的G4000。
单位为公克×毫米/公斤(gmm/kg),代表不平衡对于转子轴心的偏心距离。
如下表所示:
在您选择平衡机之前,应该先确定转子的平衡等级。
允许不平衡量的计算公式为:
式中m per为允许不平衡量
M代表转子的自身重量,单位是kg;
G代表转子的平衡精度等级,单位是mm/s;
r 代表转子的校正半径,单位是mm;
n 代表转子的转速,单位是rpm。
举例如下:
如一个电机转子的平衡精度要求为G6.3级,转子的重量为0.2kg,转子的转速为1000rpm,校正半径20mm,
则该转子的允许不平衡量为:
因电机转子一般都是双面校正平衡,故分配到每面的允许不平衡量为0.3g。
动平衡
自校报告设备名称:动平衡机精度测试编制:审核:2006 年11月3 日动平衡机精度Umar测试报告试验目的:最小可达剩余不平衡量Umar受平衡机的形式,测量方式、支承形式、校正面的平面分离比和平衡机灵敏度等因素的影响。
因此最小剩余不平衡量是衡量平衡机最高平衡能力的性能指标。
试验标准:根据中华人民共和国GB4201-84《通用卧式平衡机检验法》进行。
试验方法:将二块相当于转子假定Umar剩余不平衡量10倍的试重,依次加在转子8(或若干)等分左右平面上(两面试加点不能同相反或反相),并读出每次相应的不平衡值,按GB4201-84要求,计算出8个(若干个)读数的算术平均值。
A就是10 Umar所对应的仪表读数值,各点所得值应在11.2A0和8.8 A0范围内,则认为假定的Umar是测试平衡机的精度。
1/132006年11 月1日平衡机型号:H1BK平衡机编号:1H1K8614 试验人:黄卓斋2/132006年11 月1 日平衡机型号:YYW-300A平衡机编号: 689 试验人:黄卓斋2006年11月1 日平衡机型号:H4U平衡机编号:1HG421 试验人:黄卓斋最小可达剩余不平衡度emar试验记录表2006年11月1日平衡机型号:YYW-3000平衡机编号:H16104 试验人:黄卓斋2006年11月1日平衡机型号:JD2-3.5平衡机编号:569001 试验人:黄卓斋2006年11月1日平衡机型号:JD3-5平衡机编号: 569005 试验人:黄卓斋2006年11 月1 日平衡机型号:JD6-7平衡机编号: 569002 试验人:黄卓斋2006年11月1日平衡机型号:JD8-10平衡机编号:569003 试验人:黄卓斋2006年11 月1日平衡机型号:JD12-20平衡机编号: 569004 试验人:黄卓斋2006年11 月2日平衡机型号YYW-6000C平衡机编号: 08 试验人:黄卓斋2006年11 月1 日平衡机型号:JD8-10平衡机编号: 569003 试验人:黄卓斋2006年11 月2日平衡机型号:JD12-20平衡机编号: 569004 试验人:黄卓斋。
车轮动平衡机校准浅析
表1 卡规误差测量值表2 最小可达剩余不平衡量校准中不同加载位置测量值被测的车轮装卸方便,造价较为低廉,机械结构 和传感装置也较简单,占据着维修企业市场的较 大份额,但其灵敏度较低,在5~10g 之间,数显设 备上的最小分辨力通常为5g 。
立式动平衡机主轴垂 直放置,装卸车轮较为不便,车轮水平放置于操控台上,由于车轮的重量垂直压在主轴中心线 上,不会形成较大的力矩,同时其装有两个水平 传感器,精度和灵敏度较卧式动平衡机有很大的 提高,最高可达1g 。
JJF1151-2006《车轮动平衡机校准规范》适用于离车式硬支撑车轮动平衡机,4S 店和私营个体维 修企业一般使用卧式动平衡机,均能依此规范进 行校准。
[1]下面作者结合实际校准工作谈谈对规 范的理解,并对其提出修改意见和建议。
转子的参数计算的得出m e =11.2g ,加载的试重重量 应为112g 。
而规范的附录B 表B1中规定配备的试重 规格并没有112g ,标准器的生产厂家按部就班仅根 据附录B 提供试重。
[1]受此限制,日常校准中,我 们仅能用100g 的试重代替10m e 的试重,会造成数据不够准确。
笔者认为应增加112g 试重两个,以满足车 轮 动 平 衡 机 校 准 浅 析杨图强5 试重的加载及加载不当对校准数据 的影响(三明市计量所,福建 三明 365000)试重的加载位置在两校准面应同为内侧孔或 者外侧孔,严禁时内时外加载,否则将造成数据 失真,误差加大,极易出现数据超出规范限定范 围的情况,使校准人员做出错误判断。
以校准规 范中7.5.6所测参数为例,如表2所示。
摘要:不平衡的车轮在行驶过程中不仅会加剧轮胎、轮辋的磨损,更会殃及车辆的转向系、行驶系和传动 系,造成整车的不正常振动和抖动,进而引发事故。
车轮的平衡与否与汽车的操控性、平稳性、舒适性息息 相关。
为检测车轮的不平衡量并加以修正,车轮动平衡机应运而生。
国家于2006年发布了车轮动平衡机校准 规范JJF1151-2006《车轮动平衡机校准规范》,并于同年8月23日起实施。
如何选配平衡机
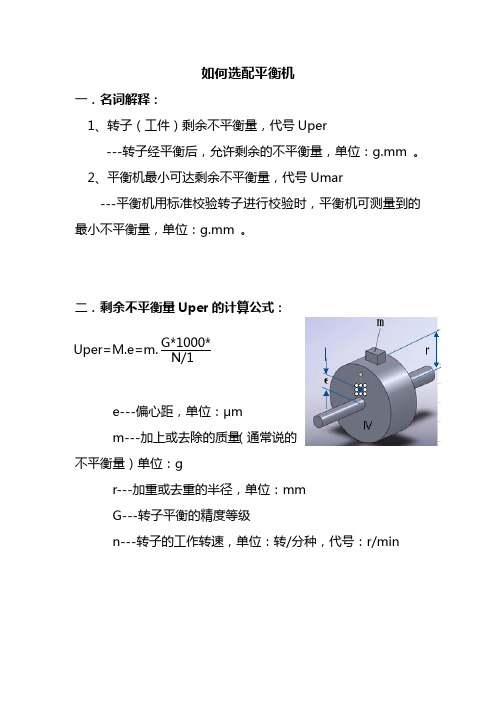
如何选配平衡机一.名词解释:1、转子(工件)剩余不平衡量,代号Uper---转子经平衡后,允许剩余的不平衡量,单位:g.mm 。
2、平衡机最小可达剩余不平衡量,代号Umar---平衡机用标准校验转子进行校验时,平衡机可测量到的最小不平衡量,单位:g.mm 。
二.剩余不平衡量Uper 的计算公式:e---偏心距,单位:μm m---加上或去除的质量(通常说的不平衡量)单位:gr---加重或去重的半径,单位:mm G---转子平衡的精度等级n---转子的工作转速,单位:转/分种,代号:r/minUper=M.e=m.r=G*1000*MN/10三.平衡机的选择步骤:1、根据转子是需要双面校正还是单面校正来粗选平衡机。
一般当转子需校验处的长度与直径之比≥5时,选择双面平衡机;反之,则选择单面平衡机。
2、如果已确定转子需做双面平衡,则再根据转子的最大直径,最大长度及重量来进一步确定平衡机,如果转子需单面校正,则应根据转子的重量,直径来选择单面功能的平衡机,有时可用双面平衡机。
3、用转子的剩余不平衡量Uper与平衡机的最小可达不平衡量Umar作比较。
a)当Uper>Umar时,平衡机选择正确。
转子的Uper值可根据前面的计算公式算出,没有转子的Uper值就无法正确选择平衡机。
b)当最小Umar>Uper时,说明现有的通用平衡机不能满足此种转子的平衡要求,需要重新设计或改制成特殊的平衡机,有时转子的支承方式特殊也需改制平衡机。
四.附各种平衡机的最小可达剩余不平衡量Umar表:单位 g.Mm圈带传动平衡机型号Umar 型号Umar 型号UmarPHQ-1.6 0.15 PHQ-160 25 PHQ-1600 250PHQ-5 0.48 PHQ-300 50 PHQ-3000 500PHQ-16 1.5 PHQ-500 80 PHQ-5000 1600PHQ-50 8 PHQ-1000 150 PHQ-7500 2500万向节传动平衡机型号Umar 型号Umar 型号UmarPHW-50 16 PHW-1000 300 PHW-7500 2500PHW-160 50 PHW-1600 500 PHW-10000 3000PHW-300 100 PHW-3000 1000 PHW-20000 6000PHW-500 160 PHW-5000 1600单面立式平衡机型号Umar 型号UmarPHD-3.5 5.5 PHD-65 100PHD-16 17.5 PHD-100 175PHD-42 55备注:具双面平衡能力的平衡机行标注的最小可达不平衡量Umar值是指左右两面值的总和,如果此机用于校正单面的转子,则其Umar值应除以2。
转子不平衡量的计算

转子不平衡量的计算方法1、计算转子的允许不平衡度Eper=(G×1000)/(n/10)Eqer---允用不平衡度单位μG ---平衡精度等级一般取6.3n----工作转速单位r/min例:某工件工作转速1400r/min平衡精度等级取6.3则Eper=(6.3×1000)/(1400/10)=6300/140=45μ2、计算允许残余不平衡量m=(Eper×M)/(r×2)m------允许残余不平衡量单位gM------工件旋转质量单位kgr------工件半径单位mm例:工件质量20kg半径60mm双面平衡故计算每个平衡面的允许的剩余不平衡量为m=(Eper×M)/(r×2)=45×20/60×2=7.5g不平衡机专用名1、不平衡量――转子某平面上不平衡和量值大小,不涉及不平衡的角位置。
它等于不平衡质量和其质心至转子轴线距离的乘积,不平衡量单位为g.mm或g.cm俗称“重径积”2、不平衡度――转子某平面上的不平衡质相对于给定极坐标的角度值3、不平衡度―――转子单位质量的不平衡量,单位为g.mm/kg,在静不平衡时相当于转子的质量偏心距,单位为微米。
4、初始不平衡量―――平衡前转子上存在的不平衡量。
5、许用不平衡量―――为保证旋转机械正常工作所允许的转子剩余不平衡量该指标用不平衡度表示时,称为许用不平衡度(亦有称许用不平衡率)6、剩余不平衡量―――平衡后转子上剩余的不平衡度。
7、校正半径――――校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。
8、校正平面干扰(相互影响)―――在给定转子某一校正面上不平衡量的变化所引起另一校正平面上平衡机指标值的改变(有时称平面分离影响)。
9、转子平衡品质―――衡量转子平衡优劣程度的指标。
G =Eperω/1000试中G为转子平衡品质,mm/s,从G0 4-G4000分11级,Eper为转子允许的不平衡率g.mm/kg或转子质量偏心距μmω相应于转子最高工作转速的角速度=2Ⅱn/60≈n/1010、转子单位质量的允许残余不平衡度(率)Eper=(G×1000)/(n/10) 单位g.mm/kg或mm/s11、最小可达剩余不平衡量(umar)---单位g.m,平衡机能使转子达到的剩余不平衡量的最小值,是衡量平衡机最高平衡能力的性能指标,当该指标用不平衡度表示时,称为最小可达剩余不平衡度(单位g.mm/kg).12、不平衡量减少率(URR)---经过一次平衡校正所减少的不平衡量与初始不平衡量之比值,它是衡量平衡机效率的性能指标,以百分数表示:URR(%)=(U1-U2)/U1=91-U2/U1)×100式中:U1为初始不平衡量;U2为一次平衡校正后的剩余不平衡量.13、不平衡国偶干扰比---单面平衡机抑制不平衡力偶影响的性能指标。
机床主轴动平衡机的性能指标介绍
机床主轴动平衡机的性能指标介绍什么是机床主轴动平衡机机床主轴动平衡机是一种用于检测机床主轴质量平衡的设备。
由于机床主轴是机床的核心部件,在加工过程中,如果主轴不平衡会导致机床的震动、声音等问题,严重的还会影响加工精度和加工效率。
因此,对机床主轴的平衡性能进行测试和修正非常重要。
机床主轴动平衡机就是用于测试和修正机床主轴平衡性能的设备。
机床主轴动平衡机的性能指标机床主轴动平衡机的具体性能指标有哪些呢?下面我们来逐一介绍。
支承剩余不平衡量支承剩余不平衡量是指,在机床主轴已经进行初平衡后,在机床主轴动平衡机支撑点上产生的不平衡量。
它是测试机床主轴平衡性能的重要指标之一。
支承剩余不平衡量越小,说明机床主轴的平衡性能越好。
运行不平衡量运行不平衡量是指在机床主轴运行中,机床主轴的不平衡量。
机床主轴的不平衡会产生离心力和振动力,从而影响机床的加工精度和工件表面质量。
因此,机床主轴的运行不平衡量也是一个非常重要的指标。
坐标旋转定位精度坐标旋转定位精度是指在机床主轴安装位置上安装定位咬合装置并进行定位时,机床主轴与排齿之间相对转动角度的误差。
它是测试机床主轴安装定位精度的一个重要指标。
坐标连接精度坐标连接精度是指安装在机床主轴上的主轴锥度与主轴锥孔之间的配合关系。
主轴锥度的误差会影响主轴转动时产生的离心力,从而影响加工质量和工件精度。
因此,坐标连接精度也是机床主轴动平衡机的一个重要指标。
附加质量误差附加质量误差是指机床主轴上附加的除定轴以外的附加质量对机床主轴平衡性能的影响。
这些质量通常是由安装在机床主轴上的夹具、工件、刀具等引起的。
附加质量误差越小,说明机床主轴的平衡性能越好。
总结机床主轴动平衡机是一种非常重要的检测设备,它能够测试和修正机床主轴的平衡性能,从而提高机床的加工精度和效率。
以上介绍的五个性能指标可以帮助我们更好地了解机床主轴动平衡机的工作原理和性能特点,对于选择和使用机床主轴动平衡机也提供了一定的指导。
平衡机最小可达剩余不平衡度测试方法的研究
平衡机最小可达剩余不平衡度测试方法的研究
于梅;于仲敏
【期刊名称】《计量技术》
【年(卷),期】2001(000)004
【摘要】本文对平衡机最小可达剩余不平衡度emar测试数据的相位一幅值曲线
进行分析,提出了最小可达剩余不平衡度emar与emar的计算值e估的数学关系式,为提高平衡机现场测试效率,更为客观地评价被测平衡机性能指标提供了依据。
【总页数】3页(P16-18)
【作者】于梅;于仲敏
【作者单位】中国计量科学研究院,;中国计量科学研究院,
【正文语种】中文
【中图分类】TB9
【相关文献】
1.基于矢量合成的平衡机最小可达剩余不平衡度测试方法的研究 [J], 孙桥;于梅
2.水泥土截渗墙墙体最小厚度测试方法研究 [J], 宋新江;张敏秋
3.一种蓄电池剩余容量测试方法的研究 [J], 李强;仰蕾伊
4.基于最小剩余法的FY-3B/IRAS资料云检测研究 [J], 王根;华连生;刘惠兰;张苗苗
5.基于数字恒流技术的B型剩余电流动作特性测试方法的研究 [J], 李奎; 王天朔; 王尧; 李倩; 林靖怡
因版权原因,仅展示原文概要,查看原文内容请购买。
动平衡机参数设置【详解】
轮胎动平衡三个参数指的是轮胎宽度、轮毂半径、轮毂内缘到平衡机之间的距离。
这是在做动平衡的过程中,需要输入动平衡机的三个参数。
轮胎宽度及轮毂半径是可以直接通过轮胎侧面知道的,而轮毂内缘到平衡机的距离是测量的。
有关动平衡机的几个性能指标:动平衡:指通过平衡机检测转子的不平衡量大小和位置,并加去重,使转子的不平衡量达到许用范围内,整个过程称之为动平衡试件质量:代表平衡机摆架的承载能力,工件质量应在许用范围内;最小可达剩余不平衡量:系平衡机平衡转子时所能达到的最小不平衡量,是衡量平衡机最好平衡能力的性能指标;不平衡量减少率:按平衡机的指示值,转子经过一次平衡校正后所减少的不平衡量与转子的初始不平衡量之比,是衡量平衡机效率的性能指标;平衡转速:平衡机在做平衡校验时的转速,对于刚性转子在保证精度的前途下,尽可能选择较低转速;平衡精度:针对转子而言,指转子单位质量内存在的不平衡量的大小,衡量转子动平衡性能的指标电机功率:代表平衡机的驱动能力,应根据工件的转动惯量GD2值,选择合适的平衡机功率,带有风叶的工件要考虑风阻损耗;传动方式:有枫叶的工件,外形不规则的工件,气动力矩较大制动困难的工件选用万向节驱动的平衡机;批量较大外形呈简单圆柱状的工件选用圈带拖动的平衡机,盘类单面平衡的工件一般选用单面立式平衡机;显示方式:指平衡机电测系统是指针表示,瓦特表指示,数码管指示,还有微机屏幕指示。
扩展资料:分类:若从应用方面讲:有通用平衡机(如平衡电机、水泵转子)和专用平衡机(如汽车刹车盘,传动轴等);卧式平衡机,立式平衡机,重型、中型、小型、特小型平衡机。
从原理上划分,有软支承平衡机、硬支承平衡机、有离心式平衡机与式平衡机。
平衡机分桥架设备与电测控制设备。
其中桥架设备部分许多厂家都利用新的材料以提高其减振性能,利用模块设计以使用一台机器同时可适用于多种转子的需要,电测控制流发展由电子管到半导体,到集成电路,由模拟电路到数字化电路,其发展可谓一日千里,日新月异。
平衡机常用术语解释
平衡机常用术语解释Let’s study the general term of balancing machine1.不平衡量Amount of Unbalance转子某平面上不平衡量的量值大小,不涉及不平衡的角度位置。
它等于不平衡质量和其质心至转子轴线的乘积,不平衡量单位是gmm或者gcm,俗称“重径积”。
2.不平衡相位Angle of Unbalance转子某平面上的不平衡质量相对于给定极坐标的角度值。
3.不平衡度Eper转子单位质量的不平衡量,单位是gmm/kg。
在静不平衡时相当于转子的质量偏心距,单位为μm。
4.初始不平衡量。
Initial unbalance平衡前转子上存在的不平衡量。
5.许用不平衡量allowable unbalance为保证旋转机械正常工作所允许的转子剩余不平衡量。
该指标用不平衡度Eper表示时,称为许用不平衡度(亦称许用不平衡率Allowable Eper)。
6.剩余不平衡量Residual Unbalance平衡校正后转子上的剩余不平衡量。
7.校正半径Radius校正平面上校正质量的质心到转子轴线的距离,一般用mm表示。
8.校正平面的干扰(相互影响)在给定转子某一校正面上不平衡量的变化引起另一校正平面上平衡机指示值的改变(有时称为平面分离影响)9.转子平衡品质衡量转子平衡优劣程度的指标。
G=eperω/1000式中G-转子平衡品质,单位mm/s。
从G0.4~G4000 分11级。
eper-转子允许的不平衡率gmm/kg 或转子质量偏心距μmω-相应于转子最高工作转速的角速度=2πn/60≈n/10,n为转子的工作转速r/min10.转子单位质量的允许不平衡度(率)eper=G×1000/n/10 单位:gmm/kg或μm11.最小可达剩余不平衡量(代号为Umar,即minimum achievable residual unbalance)最小可达剩余不平衡量(Umar)。
平衡精度等级及允许剩余不平衡量计算
平衡精度等级及允许剩余不平衡量计算
平衡机精度等级
国际标准化组织(ISO)于1940年制定了世界公认的ISO1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以2.5倍为增量,从要求最高的G0.4到要求最低的G4000。
单位为公克×毫米/公斤(gmm/kg),代表不平衡对于转子轴心的偏心距离。
如下表所示:
在您选择平衡机之前,应该先确定转子的平衡等级。
允许不平衡量的计算公式为:
式中m per为允许不平衡量
M代表转子的自身重量,单位是kg;
G代表转子的平衡精度等级,单位是mm/s;
r 代表转子的校正半径,单位是mm;
n 代表转子的转速,单位是rpm。
举例如下:
如一个电机转子的平衡精度要求为G6.3级,转子的重量为0.2kg,转子的转速为1000rpm,校正半径20mm,
则该转子的允许不平衡量为:
因电机转子一般都是双面校正平衡,故分配到每面的允许不平衡量为0.3g。