川速雷达
雷达通信协议(通用版)
雷达通信协议(通用版)———— 2012.12.26北京川速微波科技有限公司★ 声明:● 协议内容○ 雷达测速状态下送出的数据格式○ 调试或设置雷达参数的通信口令● 本协议适用于川速微波所有款型的雷达● 如有新的使用或需求,可向本公司提出协议申请或协商标注说明:XX XX:内容强调注明XX XX:区分注明XX XX:特殊修改一、总述雷达上电复位后先输出FEh FDh两秒内若无更新请求则输出FDh FEh然后进入测速状态,测量车速范围02h~F0h(对应2~240 km/h,包括边界)。
在测速状态通过命令可进入设置状态,完成各种设置后可通过命令退出设置状态回到测速状态。
上电复位在测速状态下有五类工作模式可选:1,持续送数模式,无车持续输出00h,若探测到车速则输出车速数据(一辆车通过探测区会有一串数据),数据间隔固定为26ms。
2,车头触发送数模式,平时无车不再输出00h,机动车进入照射区时只送1次数据(具体见后命令)。
3,车尾触发送数模式,平时无车不再输出00h,机动车驶出照射区时只送1次数据(具体见后命令)。
4,应答模式,只有上位机下发数据请求(F7h)才回送车速数据。
5,计量院送数模式,基本和持续送数模式一样,只是判定条件较低,更容易触发送数。
设备出厂默认为车头触发送数模式。
车速数据格式默认为单字节16进制数(具体见后命令)。
二、设置命令设置命令基本格式回应:帧头命令参数(2字节)帧尾帧头长度内容帧尾FAh 3xh FBh FAh 3xh FBh 其中x指示具体命令。
其中x指示内容的字节数。
1,进入设置状态:FAh 31h 30h 30h FBh先停止送数,然后回应:FAh 32h xxh 3xh FBh其中xxh为:30h表示正确执行,31h表示不正确。
下同。
3xh为标志字节,暂未详细定义。
2,退出设置状态:FAh 32h 30h 30h FBh若在设置状态,先回应:FAh 32h xxh 3xh FBh ,然后恢复送数。
电子狗工作原理深入探究
我司 产品
山寨 产品
不久前的展会上很多厂家展出了自己的所谓 “镀金雷达板”,鼓吹自己的雷达板性能如 何优越,那么我们来仔细分析下雷达板的导 波喇叭口 镀金与雷达性能关系如何呢?
导波喇叭天线是雷达为接受K,KA,KU,X 频段信号的一个腔体,K,KA,KU,X频段
是微波信号,其波长都在厘米到毫米级别的 波,
其利科技有限公司产品培训
市场部 2013年3月
当前警方测速设备简介
1)从检测技术上来看,世界上主要的测速方式有
雷达检测
超声波 检测
地磁式检 测技术
激光检测
便携式视 频抓拍
红外检测
2)从测速的方式来说,主要的测速方式有
雷达测速
地磁式测 速
激光测速 区间测速
国内警用测速雷达
中国市场上的雷达品牌主要有: 俄罗斯:西米控的“火花”系列雷达 奥利维亚公司的“金雕”系列平板雷达 美国: ACI公司S3雷达 国内:安道雷公司的CSR-68雷达 川速微波公司的CSR-I系列平板雷达 雷通公司的CS-12雷达 惠昌公司的MPR-U系列平板雷达
国产雷达板与我司产品采用韩国雷达板区别 :
雷达技术是电子狗技术的灵魂,众所周知,固定测速软件和 数据随手可得,而流动测速是行业内主要核心竞争技术, 这也是国产雷达与韩国雷达区别所在,那么雷达技术的核心 主要又在哪儿呢?
从技术实现的角度,不难分析出,其主要核心技术主要在1, 接受天线,2,中频数据软件处理系统 这两块技术真正决定了一款雷达性能好坏。
而在合金材料上镀金不过是画蛇添足,对信 号真正起不到帮助,
从技术角度来说,镀金对信号是有帮助的, 那要把金镀到雷达板的什么地方有帮助呢? 从电磁学的角度来说,只有把金镀到导电带 上才对雷达接受起到电性能的帮助。
雷达的命令
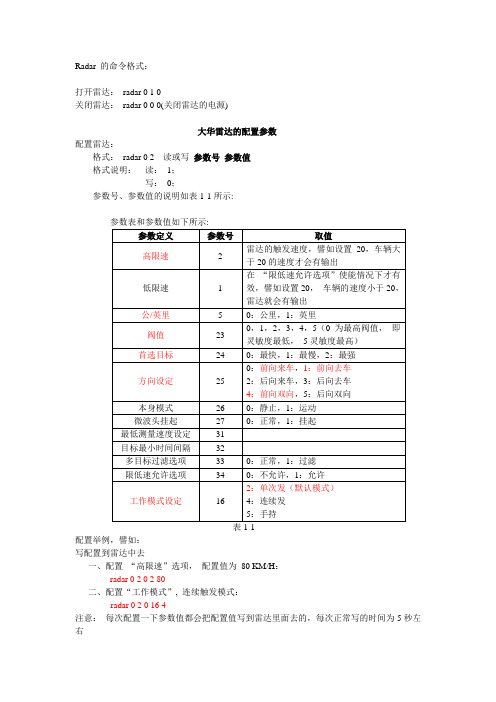
Radar 的命令格式:打开雷达:radar 0 1 0关闭雷达:radar 0 0 0(关闭雷达的电源)大华雷达的配置参数配置雷达:格式:radar 0 2 读或写参数号参数值格式说明:读:1;写:0;参数号、参数值的说明如表1-1所示:表1-1配置举例,譬如:写配置到雷达中去一、配置“高限速”选项,配置值为80 KM/H:radar 0 2 0 2 80二、配置“工作模式”, 连续触发模式:radar 0 2 0 16 4注意:每次配置一下参数值都会把配置值写到雷达里面去的,每次正常写的时间为5秒左右2、读配置:读取当前的“高限速配置”值radar 0 2 1 2 0如果当前配置的高限速值为20,返回的值是:5a 5a 5a 5a 0 37 02 01 2 14 0 (14 是16进制,转换为10进制为20) 返回值是倒数的第二个字符3、诊断雷达是否握手成功telnet 上去,敲cat /proc/kmsg:若看到“<7>radarKthread_Process : HandShake Failed “打印,表明雷达的握手失败4、查看雷达的WEB页面的配置是否配置到雷达中去敲命令吧,这个最可靠了5、有些定制化的程序,敲cat /proc/dahua/cap485, 可以看到如下的打印信息:………………………………………………………………………………….SNAP_TYPE_MODE: 0, g_coil_state = 0 , radar_sate = 0, eight: 0, nine: 0, ten: 0, eleven: 0…………………………………………….雷达与相机的电源接线注意:接雷达的时候需要注意雷达与12V电源如何接。
雷达的GND 和12V电源的GND连接在一起;雷达的正极接在相机的后面板的“C”插口下,12V的电源的正极接在后面板的“NO”插口下,如下图:川速雷达命令调试平常不抓拍时候问题排除步骤和某些参数定义一、首先确认下串口有没有中断次数递增,敲cat /proc/interrupts, 可以看到如下打印:# cat /proc/interruptsCPU00: 26121 AINTC vpfe_capture01: 26121 AINTC vpfe_capture12: 26120 AINTC dm365_h3a_aew5: 22872 AINTC DaVinciPreviewer8: 126164 AINTC davinci_osd10: 22872 AINTC IRQK_Handler12: 32 AINTC musb_hdrc16: 45744 AINTC EDMA Completion17: 134 AINTC EDMA CC Error18: 0 AINTC EDMA TC0 Error19: 5 AINTC EDMA TC1 Error26: 2098 AINTC davinci-mmc32: 1105777 AINTC clockevent33: 11 AINTC free-run counter34: 0 AINTC DelayTimer135: 0 AINTC DelayTimer239: 22487 AINTC i2c_davinci40: 3383 AINTC serial041: 1 AINTC seria1l42: 0 AINTC dm_spi44: 22957 AINTC vdirq52: 0 AINTC mac_rx_threshold53: 755 AINTC mac_rx54: 0 AINTC mac_tx55: 0 AINTC mac_misc61: 0 AINTC EDMA TC2 Error62: 0 AINTC EDMA TC3 Error41号中断(UART1)计数是否持续增加(主要是确认车检器、信号检测器等是否信号到达相机这边)40号中断(URAT0)计数是否持续增加(主要是确认雷达这边是否有信号到达相机)44号中断计数是否增加(主要是确认相机的硬件是否无误的)二、确认各个协议参数是否配置好,cat /proc/dahua/cap485 , 可以看看相关的协议是否配置正确,各协议对应的数据统计值如TEST_CAR、TEST_NEW是否有增加,相关的违法抓拍使能是否打开。
CSR-LD双雷达微波车辆检测器-川速微波

CSR-LD双雷达微波车辆检测器CSR-LD双雷达微波车辆检测器是由北京川速微波科技有限公司自主研发的加强型微波车辆检测器。
该检测器采用国际最先进的多波束电扫描微波探测技术,可在侧装条件下精确测量车辆速度、位置等信息。
本产品用于统计车流量、车道占有率、单车车速、平均车速、车头时距、车型分类等车道信息。
本产品为交通管理者提供准确、可靠、实时的车辆速度信息,车流量信息等,保障交通管理系统的正常运行,为建设智慧交通、智慧城市充当“千里眼”与“顺风耳”。
一、工作原理CSR-LD双雷达微波车辆检测器内置两个雷达收发器,其产生两个微波束在检测路面上投映出两个检测区域,当车辆每经过一次检测区域时都会给CSR-LN反射一个微波信号,当一辆车经过两个检测区域后,通过复杂的计算分析能够精确地得到其车速和相关的信息。
二、产品特点1、CSR-LD双雷达微波车辆检测器采用国际最先进的多波束电扫描微波探测技术,一体化集成双雷达前端,自主研发,适用于路旁车流量监控,并具有探测每条车道车辆速度的能力。
2、全自动高精度地划分车道,触发定位准确,覆盖多达12车道,能够及时准确反馈对多个车道的车流量统计信息,包括:车流量、道路占有率、平均车速、车型分类等交通信息。
一体化集成双雷达前端,多波束电扫描微波探测技术,侧装应用下,全自动检测划分多达12个车道,探测每个车道的车速信息。
3、支持RS232/RS485通信,支持TCP/IP协议,支持无线传输,支持开放的通信协议,适应性强,可根据用户需要定制。
4、自带存储,意外断电后,雷达的设置参数不丢失。
5、软件操作界面简单明了,支持客户自定义数据查询间隔,灵活性强。
6、安装简单,维护方便,能够适应全天候工作,不受大风、雨、雪、冰雹等恶劣天气的影响,抗干扰能力强。
三、应用范围1、高速公路路段或城市快速路口交通监控系统2、定点路段路况信息预报系统3、大范围的交通监控网络4、十字路口红绿灯智能控制系统5、大型停车场智能泊车引导系统四、安装方式和安装要求1、安装方式将雷达安装于道路旁的立杆上,从车辆侧面进行测量,本测量方式要求将雷达照射方向与道路垂直,此时,雷达照射区能覆盖多条车道,可提供多条车道的路况信息,其安装方式如下图所示:2、安装要求由于雷达照射区与雷达的安装夹角、高度及与第一车道外侧的距离(侧装方式)还有车道宽度、绿化带距离和宽度等因素有关,因此雷达安装时请使用辅助测量设备,将以上安装参数测量并输入系统。
川仪雷达物位计说明书

川仪雷达物位计说明书川仪雷达物位计是一种先进的测量仪器,可以用于准确测量各种液体和固体物料的物位高度。
其采用了雷达技术,具有高精度、稳定性强、抗干扰能力强等特点,在化工、石油、食品等工业领域具有广泛的应用。
一、工作原理川仪雷达物位计利用了微波脉冲技术进行物位测量。
当雷达发射器向目标物体发射微波信号时,一部分微波会被目标物体反射回来,雷达接收器接收到反射的微波信号后,通过计算信号的时间延迟,可以测量出物体与雷达之间的距离。
通过周期性地重复这一过程,可以得到物体的物位高度。
二、技术特点1. 高精度:川仪雷达物位计采用先进的雷达技术,能够实现高精度的测量,误差极小,提供准确的物位数据。
2. 稳定性强:川仪雷达物位计在复杂环境中的测量精度能够得到保证,不受温度、压力、湿度等因素的影响,具有良好的稳定性。
3. 抗干扰能力强:川仪雷达物位计可以有效应对外界的干扰,如电磁干扰、细粒物料的反射干扰等,保证测量数据的准确性。
4. 适用范围广:川仪雷达物位计可以测量各种液体和固体物料的物位高度,适用于化工、石油、食品等多种工业领域。
三、安装注意事项1. 安装位置:川仪雷达物位计应安装在垂直于物体表面的方向上,以便获得准确的物位数据。
2. 避免遮挡:安装时应避免遮挡物体,确保雷达信号的正常发射和接收。
3. 温度影响:雷达物位计在极端温度下的工作应避免使用,以免影响仪器的测量精度和寿命。
4. 金属干扰:应避免将雷达物位计安装在靠近金属物体的位置,以免金属对微波信号的传播产生干扰,影响物位测量的准确性。
四、使用步骤1. 连接电源:将川仪雷达物位计与电源连接,确保供电正常。
2. 参数设置:通过仪器的人机交互界面,设置合适的测量参数,如信号发射频率、脉宽等。
3. 校准:在测量前,需要对川仪雷达物位计进行校准,以确保测量结果的准确性。
4. 开始测量:设置好参数,并进行校准后,即可开始测量物体的物位高度。
五、日常维护1. 定期检查:需要定期检查仪器的供电和信号连接是否正常,如有异常应及时进行处理。
川速K28型雷达调试说明
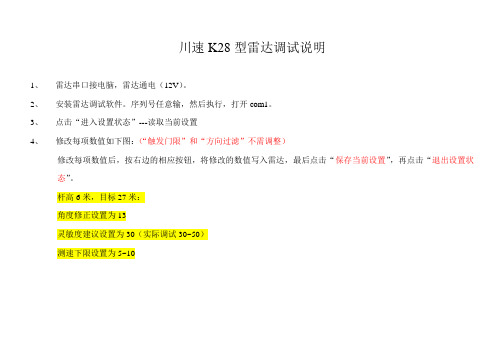
川速K28型雷达调试说明
1、雷达串口接电脑,雷达通电(12V)。
2、安装雷达调试软件。
序列号任意输,然后执行,打开com1。
3、点击“进入设置状态”---读取当前设置
4、修改每项数值如下图:(“触发门限”和“方向过滤”不需调整)
修改每项数值后,按右边的相应按钮,将修改的数值写入雷达,最后点击“保存当前设置”,再点击“退出设置状态”。
杆高6米,目标27米:
角度修正设置为13
灵敏度建议设置为30(实际调试30~50)
测速下限设置为5~10
断电重启后,点击“进入设置状态”-------“读取当前设置”,检查修改数值是否正确。
5、用手掌由远到近向雷达挥动,软件上会显示不同单字节字符,表明雷达正常。
6、如相邻车道对雷达有干扰,是因为雷达灵敏度偏高,需将“灵敏度”的值调大。
角度修正的值越小,雷达测到的速度越慢;角度越大,雷达测到的速度越快。
灵敏度的值越小,灵敏度越高,发射波束角度越大,覆盖面越广。
测速下限,如果没有特殊应用的情况,不要调的太低,最好在5~10以上。
测试时,选择“持续”工作模式,数据正常后,再改回“触发”工作模式。
改回“触发”工作模式后,挥手测试不一定好用。
因为室内测试不准确,最好实际应用测试,因为雷达的某些算法是根据车辆特点设计的。
只有挥手与车辆行驶特点像符合时,才会有数据上来。
注:232雷达通过直连线与笔记本连接232雷达通过交叉线与485转换器连接
雷达工作电流:160mA~170mA。
川速雷达传感器现场调试经验(用户版)v1.05

现象和可能原因分析解决方法(1)相机未抓拍照片查看雷达通信口,发现单车通过照射区雷达没有送数,有可能为以下原因1.未正常供电检查雷达的电源,可以用万用表测量雷达工作电流,电压,正常情况下雷达工作电压12V,电流200毫安左右。
还要查看电源功率是否满足雷达应用,雷达的额定功率约为2.5W,供电电源应大于5W。
2.通信线线序错误查看雷达使用说明书或安装手册,检查雷达线序。
3.雷达通信接口RS232和RS485混淆查看雷达外壳标签。
RS485通信的雷达,外壳上贴着标有RS485的标签。
4.判断RS232接口雷达通信是否正常用万用表测量雷达RS232发送线和地线之间的电压,在不接负载的情况下应该为-9V左右。
5.如果使用了串口通信服务器根据说明书查看串口服务器的供电模块和通信线序。
查看雷达通信口,发现单车通过照射区雷达正常送数,说明相机部分出现问题,有可能为以下原因1.未正常供电根据相机说明书,检查相机供电模块。
2.和雷达通信协议未匹配仔细校对雷达和相机的通信协议。
3.相机IP地址等参数设置错误根据相机的说明书重新设置。
4.相机内部设有一个抓拍的速度下限,只有雷达的测速值大于相机抓拍的速度下限,相机才抓拍。
当相机的抓拍下限设置的太高,而实际车速较低时会造成相机不抓拍根据现场实际车速调整相机抓拍的速度下限值。
(2)抓拍照片中的速度值不准雷达部分可能原因1.雷达速度修正值设置不正确根据文档《雷达在卡口应用下的速度修正》重新设置相关参数。
2.安装不合理根据文档《平板型微波测速雷达简明安装手册》重新调整雷达的安装。
3.雷达受到外部干扰请联系本公司的技术人员,我们需要了解雷达的使用环境和工作状态再制定相应的解决方案。
4.雷达经常性的重新启动,相机把雷达启动时发送的标志字节FD、FE当成了速度值,进行了抓拍,造成照片中出现异常高速值雷达的供电不符合标准,请查看雷达的供电部分。
5.雷达的供电电压小于9V,会造成雷达工作不正常,可能会出现测速值不准确的情况检查雷达电源。
重庆霍克川仪脉冲雷达调试步骤
脉冲雷达调试步骤:
1、安装好仪表后在画面按OK键出现快速设置,在按OK键出现
量程低位及量程高位。
按现场实际情况设置量程。
(按OK键量
程设置第一个数字变为黑色,增加按箭头,减小按箭头。
修改好后按箭头到第二个数字,依次类推改好后按OK键确
认)
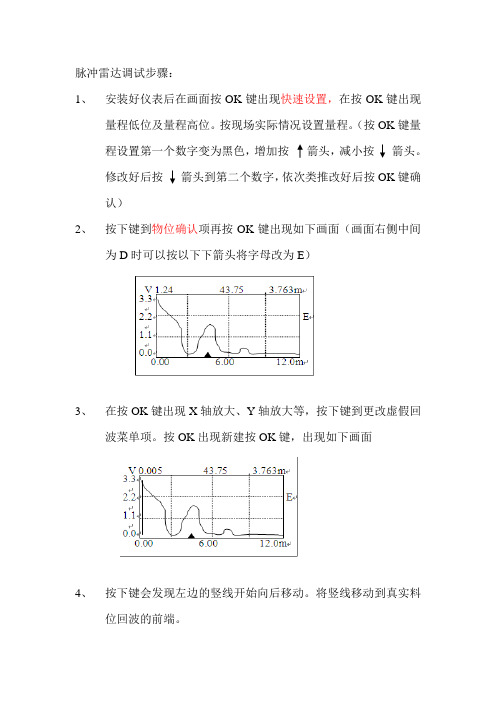
2、按下键到物位确认项再按OK键出现如下画面(画面右侧中间
为D时可以按以下下箭头将字母改为E)
3、在按OK键出现X轴放大、Y轴放大等,按下键到更改虚假回
波菜单项。
按OK出现新建按OK键,出现如下画面
4、按下键会发现左边的竖线开始向后移动。
将竖线移动到真实料
位回波的前端。
5、 按OK 键,等待画面出现双曲线后,按ECS 键退到测量画面,
仪表设置完成。
6、 在仪表的测量画面按
使画面右侧出现大写字母R
注意:如果测量点的距离超过15米。
需要进入仪表的系统设置(仪表画面按OK 键出现快速设置按 到系统设置,选择距离系数将 零点校正:改为-0.156m
比例校正:改为1.0020m )
15米以内不用修改。
川速雷达i测试使用说明

(1)因雷达可以随时断电和断开,有时软件“主要显示区域”的ASCII显示和雷达数据方式未能对应,可点击“ASCII显示强制切换”来切换软件窗口的显示方式。
(2)“当前车速显示”区域,要先选择匹配雷达的输出格式,按“锁定”按钮才可显示当前车速值(单位是km/h)和方向信息。如不清楚当前雷达数据格式,可先进入设置状态进行查看。
5、当在计量院使用奥利维亚测速仪测量雷达时,请按下面步骤设置雷达参数:
(1)点击“进入设置状态”;
(2)点击“计量院测试”;
(3)点击“退出设置状态”,此时处于奥利维亚测速仪测试状态。
★检查设置是否成功,按下“读取当前设置”。
(3)已被更改的雷达当前设置若要保存住,请点击“保存当前设置”。注意:保存的是雷达内部的当前设置!若你只是修改软件的编辑窗口,而没通过设置命令按钮下发给雷达,是不会被保存的。
4、当有扩展的命令还没来得及更新软件,或有其他串口调试需求时,可将16进制数填入对应编辑窗口,然后点击“任意发送”即可从串口输出。16进制数格式应按后面引号内列举的格式,不包括引号:“xx xx xx”
使 用 说 明
Байду номын сангаас
川速微波测速雷达调试软件分为“通用TSRadarU”和“R型专用TSRadarR”两个版本,请留意本调试软件版本显示,切勿混淆!
1、串口选择:
选择连接的串口。若在中途更换过正在使用USB转串口,可以点击“软件自身状态复位”来重新识别并要重新选择串口。
2、显示:
(3)为了方便在“主要显示区域”中大量0x00数据中发现非零数值,0x00可显示成 __ ,能在软件右边选择。要暂停窗口显示可去掉勾选“显示数据”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ic 波 1.总述................................................................................................................. - 2 -
M 微 2.设置命令......................................................................................................... - 2 -
3xh
其中x指示内容的字节数
FBh
微 1、进入设置状态:FAh 31h 30h 30h FBh
速 先停止送数,然后回应:FAh 32h xxh 3xh FBh
其中xx为:30h表示正确执行,31h表示不正确。下同。
川 3xh为标志字节,暂未详细定义。
2、退出设置状态:FAh 32h 30h 30h FBh
北京川速微波科技有限公司
感谢您选用本公司生产的 CSR﹣I 系列平板型微波测速雷达!
波 版权信息(Copyright):本产品的硬件设计及软件模块的版权归北京川速微波 微 科技有限公司所有,受中华人民共和国版权法和国际知识产权公约保护,任何单 速 位和个人不得侵犯。
川 本产品规格与设计可能在未经通知情况下有变更,最终解释权归北京川速
e 回应:FAh 32h xxh 3xh FBh av 11、调用出厂默认设置为当前设置:FAh 3dh 32h 30h FBh w 回应:FAh 32h xxh 3xh FBh icro 波 12、将当前设置回传给PC:FAh 3dh 34h 30h FBh
回应:FAh 3yh yyh … yyh FBh
ns 速 四. 雷达上位机调试软件使用方法(以通用版为例):...................................... - 5 -
Tra 川 五.车辆速度的修正计算方法 ................................................................................ - 6 -
s 1、只输出来向车速 n 2、只输出去向车速 Tra 回应:FAh 32h xxh 3xh FBh
卓越的产品性能 可靠的产品质量 专业的技术服务 优秀的品牌形象
-3-
北京川速微波科技有限公司
8、选择车速数据格式:FAh 38h 3xh 30h FBh
波 其中x定义:0、单字节,无方向无帧格式。此为默认设置。 1、双字节(仅对CSR-IR型有效),有方向无帧格式,首字节为方向:F9h来向、F8h 去向、F7h不确定,K型雷达固定为‘F7’。 2、ASCII码格式,有速度输出时为四字节,首字节为方向:‘+’来向,‘-’ 微 去向、‘*’不确定,无速度输出的是‘*000’ ,K型雷达首字节固定为‘*’。 例如:来向车速125km/h,输出:2bh 31h 32h 35h
M ≤±1 km/h s 26ms n 12VDC Tra 约 2.5 瓦
卓越的产品性能 可靠的产品质量 专业的技术服务 优秀的品牌形象
-1-
北京川速微波科技有限公司
通信接口:(出厂前选定)
波 ⑴ 全双工 RS232,9600bps
微 DB9 Female 速 2
雷达端 导线颜色
棕
信号 TX
川3
白
14、查询软件版本:FAh 3fh 30h 30h FBh
e 回应:FAh 3xh 30h 版本字符串(ASCII码格式,无结尾字节00h)FBh av 其中x为字符串长度(算上字符串结尾字节00h)
例如:FAh 3dh 30h 6Bh 30h 31h 2dh 76h 32h 2eh 31h 30h 2eh 33h 33h FBh
速 方向不确定车速89km/h,输出:2ah 30h 38h 39h 川 回应:FAh 32h xxh 3xh FBh
9、低速下限调整:FAh 39h yyh 30h FBh 其中yy为速度值。调整范围1~200(km/h),默认为5。 回应:FAh 32h xxh 3xh FBh
10、将当前设置写入EEPROM:FAh 3dh 31h 30h FBh
av 二.技术规格............................................................................................................. - 1 -
row 三.常用通信协议 .................................................................................................... - 2 -
若在设置状态,先回应:FAh 32h xxh 3xh FBh ,然后恢复送数
若在测速状态则不回应。以下命令在测速状态均不响应。
3、选择工作模式:FAh 33h 3xh 30h FBh
e 其中x定义:0、持续送数(忽略触发门限设置,送数间隔约26ms,无车时送00h) v 1、车头触发送数模式(即每辆车进入探测区只送1次数,无车时不再送00h) a 2、车尾触发送数模式(即每辆车进入探测区只送 1 次数,无车时不再送 00h)
5、应答模式
w 回应:FAh 32h 3xh 30h FBh icro 波 4、设置触发门限:FAh 34h yyh 30h FBh (需硬件订制输出线)
测速值大于门限值时,同步输出TTL脉冲信号,高电平维持26ms左右,连续模式下,目标车辆
M 微 的所有测速周期都输出高电平。 s 其中yy为车速门限值十六进制值。门限范围1~240(km/h),默认值30 n 速 回应:FAh 32h xxh 3xh FBh ra 川 5、设置角度修正:FAh 35h yyh 30h FBh T其中yy为角度值。角度范围0~70度。默认为0度,即不修正。
六. 常用安装及使用方法 ............................................. - 8 -
ve 1、顶装方式......................................................................................................... - 8 wa 2、侧装方式......................................................................................................... - 9 ro 七.维护保养及常见故障判断 ................................................................................ - 9 ic 八.机械尺寸........................................................................................................... - 11 TransM 附一:产品保修卡、保修条例及合格证
例如需修正25度,下发:FAh 35h 19h 30h FBh
e 回应:FAh 32h xxh 3xh FBh av 6、设置灵敏度:FAh 36h yyh 30h FBh w 其中yy为灵敏度,数值越大门限越高(灵敏度越低),有效范围1~240。
预设值:20
ro 回应:FAh 32h xxh 3xh FBh ic 7、设置方向过滤:FAh 37h 3xh 30h FBh (仅对CSR-IR型有效) M 其中x定义:0、不过滤方向。此为默认设置。
240 km/h)。在测速状态通过命令可进入设置状态,完成各种设置后可通过命令退出设置状态 回到测速状态。
e 在测速状态下有三类工作模式可选,一类是持续送数模式,无车持续输出00h,若探测到车 v 速则输出车速数据(一辆车通过探测区会有一串数据),数据间隔约为26ms。另一类为触发送 a 数模式,探测区无车不再输出00h,有车通过时只送1次数据,同时具有输出车速和实时触发功 w 能(具体见后命令)。第三类是应答模式,只有在测速状态时上位机下发数据请求(F7h)才回 ro 送车速数据。设备出厂默认为第二类模式。
5
绿
RX GND
PC 端
DB9 male 信号
2
RX
3
TX
5
GND
⑵ 半双工 RS485,9600bps
ve DB9 Female a 1 w 2 ro 5
雷达端 导线颜色
棕 白 绿
信号 A+ B- GND
PC 端
DB9 male 信号
1
A+
2
B-
5
GND
Mic 微波 三.常用通信协议 rans 速 1.总述 T 川 雷达上电复位后先输出FDh FEh然后进入测速状态,默认测量车速范围01h~F0h(对应1~
波 微 速 川
CSR﹣I 系列
TransMi平cr板产ow型品a微使ve波用测说川速明速雷书达微波 北京川速微波科T技r有a限n公sM司 icrowave
波 微 速 川
TransMicrowave
波 速微 川
TransMicrowave
波 微 速 川
目
录
e 一.简介..................................................................................................................... - 1 -
M 微 其中y为后续字节个数(不含FBH)。yyh … yyh为可存参数,顺序为:工作模式、出发门限、 s 修正角度、灵敏度、车速格式、测速下限、测速跃变门限、5个保留字节。 ran 速 13、软复位:FAh 3eh 30h 30h FBh 川 回应:FAh 32h xxh 3xh FBh 回应之后雷达立即复位,不再响应任何命令,复位所花时间约1 T秒。