A4980-汽车可编程步进驱动器
步进马达与伺服马达区分讲解
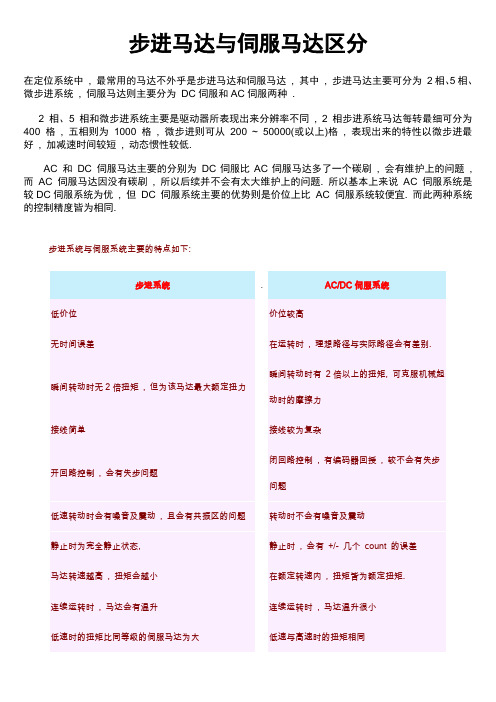
步进马达与伺服马达区分在定位系统中, 最常用的马达不外乎是步进马达和伺服马达, 其中, 步进马达主要可分为2相、5相、微步进系统, 伺服马达则主要分为DC伺服和AC伺服两种 .2相、5相和微步进系统主要是驱动器所表现出来分辨率不同, 2相步进系统马达每转最细可分为400 格, 五相则为1000 格, 微步进则可从200 ~ 50000(或以上)格, 表现出来的特性以微步进最好, 加减速时间较短, 动态惯性较低.AC 和DC 伺服马达主要的分别为DC伺服比AC伺服马达多了一个碳刷, 会有维护上的问题, 而AC 伺服马达因没有碳刷, 所以后续并不会有太大维护上的问题. 所以基本上来说AC伺服系统是较DC伺服系统为优, 但DC 伺服系统主要的优势则是价位上比AC 伺服系统较便宜. 而此两种系统的控制精度皆为相同.步进系统与伺服系统主要的特点如下:.上图为标准的步进系统(开回路)上图为脉波命令式伺服系统(半闭回路)上图为电压命令式伺服系统(全闭回路)微步进驱动技术图一(全步进,两相激磁)图二(半步进)步进驱动器脉波输入方式为何有1P(one pulse) 及2P(two pulse)之分?1. TWO pulse 方式, 亦即所谓的2P方式.所谓的TWO pulse方式,一般日系进口的定位控制器或步进驱动器皆采此种脉波格式,就是由控制器输出到步进马达驱动器的两个信号中,一个是正转脉波(CW)信号,用来输出正转方向所要移动脉波数量,另一个信号则为反转方向(CCW)信号,用来输出反转方向所要移动脉波数量,以此来控制步进马达作正反转的任意长度移动了. 此两个信号的波形如下:这种脉波输出方式会有两种不良的影响,其一,会有冲突的情况,因为若是两边因某些原因而都有输出脉波信号到驱动器,则无法确定到底驱动器是要正转还是要反转;其二,因为两边都有可能输出脉波到驱动器,若在速度变高,高频的信号较容易受到外在的干扰,所以此两个脉波信号受干扰的机率会比较大,但TWO pulse的方式,若是要让马达的转动方向颠倒,只要将此两个脉波信号互换即可,程序比较方便.2. ONE pulse方式, 也就是所谓的1P方式.所谓的ONE pulse方式,一般欧美进口的定位控制器或步进驱动器皆采此种脉波格式,就是由控制器输出到步进马达驱动器的两个信号中,有一个是脉波(pulse或step)信号,用来输出所要移动脉波数量(即长度),另一个信号为方向(direction)信号,这信号只是做信号高低准位的切换而已,用来表示马达的转动方向,如此一来,即可控制步进马达作正反转的任意长度移动了. 此两个信号的波形如下:这种脉波输出方式比TWO pulse较好,因为不会有像TWO pulse一样可能会有冲突的情形发生,且这种ONE pulse方式的受干扰可能性较TWO pulse小,因为只有一条信号有可能是高频的脉波信号(pulse),另一个方向信号(dir)则只是有时会有准位上的变化,并非高频信号,所以较不容易受到干扰,ONE pulse方式主要的缺点是若要使马达方向颠倒,不像TWO pulse方式那样方便, 而需在马达线那端互换接线来成方向颠倒的功能.。
E4980A 精密 LCR 表用户指南
独家补救
这里提供的补救指对买方唯一的独家补救。是德科技将不对任何直接、间接、特殊、 偶然或必然的损害负责,无论这些损害是基于合同、侵权还是任何其他法律理论。
5
协助
产品维护协议及其它客户协助协议适用于是德科技的产品。 如欲获得任何协助,请与最近的是德科技销售和服务处联系。本手册的背面提供了 这些销售和服务处的地址。
表示示例1、示例2和示例3(菜单、按钮或方框)的 顺序操作。“-”可省略。
6
文档地图
以下手册适用于Keysight E4980A。 • 用户指南(制造号E4980-900x0,附属于选件ABA,英文版) 本手册描述了有关E4980A的大部分基本信息。它提供了每个功能的详细操作步骤(从 功能概览到系统设置)、测量示例、选件、附件、技术指标、GPIB命令、功能键功能列 表及错误消息。
部分版权©1996归微软公司所有。保留所有权利。 ©版权2006, 2014归是德科技公司所有。
手册印刷信息
手册的印刷日期和制造号表示其当前的版本。印刷日期在印刷新版本时将会变更(重 印时的少量纠正和更新不再变更印刷日期)。制造号在包含大量技术改造时变更。
2006年3月
第1版(制造号:E4980-90000)
为了避免带来其他事故的危险,请勿安装替代部件或未经授权对仪器进行改 装。请将仪器返回到是德科技的销售与服务处进行维修,以保证在操作仪器时 保持安全状态。 • 危险操作警告
本手册中的警告(如下面的示例)介绍了潜在的危险操作。请务必遵守警告 中提及的操作细则。
在这种仪器中存在能导致死亡的危险电压。 在装卸、测试和调整这种仪器时需格外小心。
a4982中文资料

基于A4982设计的DMOS微型步进马达驱动技术Allegro公司的A4982是集成了电平转换和过流保护的微型步进马达驱动器,适用于双极步进马达驱动,工作在全步进,半步进,1/4步进和1/6步进模式,输出驱动能力高达35V和±2 A. A4982包括固定的离线电流调节器,兼容3.3V和5V逻辑,睡眠模式电流小于10 μA.本文介绍了A4982主要特性和优势, 功能方框图, 典型应用框图以及LP和ET封装的应用电路和PCB布局框图.DMOS Microstepping Driver with Translator and Overcurrent ProtectionThe A4982 is a complete microstepping motor driver with built-in translator for easy operation. It is designed to operate bipolar stepper motors in full-,half-, quarter-, and sixteenth-step modes, with an output drive capacity of up to 35 V and ±2 A.The A4982 includes a fixed off-time current regulator which has the ability to operate in Slow or Mixed decay modes. The ET package meets customer requirements for no smoke no fire (NSNF) designs by adding no-connect pins between critical output, sense, and supply pins. So, in the case of a pin-to-adjacent-pin short, the device does not cause smoke or fire. Additionally, the device does not cause smoke or fire when any pin is shorted to ground or left open.The translator is the key to the easy implementation of the A4982. Simply inputting one pulse on the STEP input drives the motor one microstep. There are no phase sequence tables, high frequency control lines, or complex interfaces to program.The A4982 interface is an ideal fit for applications where a complex microprocessor is unavailable or is overburdened. During stepping operation, the chopping control in the A4982 automatically selects the current decay mode, Slow or Mixed. In Mixed decay mode, the device is set initially to a fast decay for a proportion of the fixed off-time, then to a slow decay for the remainder of the off-time. Mixed decay current control results in reduced audible motor noise, increased step accuracy, and reduced power dissipation.Internal synchronous rectification control circuitry is provided to improve power dissipation during PWM operation. Internal circuit protection includes: thermal shutdown with hysteresis, undervoltage lockout (UVLO), and crossover-current protection.Special power-on sequencing is not required. The A4982 is supplied in two surface mount package, the ET, a 5 mm × 5 mm, 0.90 mm nominal overall package height QFN package, and the LP package, a 24-pin TSSOP. Both packages have exposed pads for enhanced thermal dissipation, and are lead (Pb) free (suffix –T), with 100% matte tin plated leadframes.A4982主要特性和优势:▪ Low RDS(ON) outputs▪ Automatic current decay mode detection/selection▪ Mixed and Slow current decay modes▪ Synchronous rectification for low power dissipation ▪ Internal UVLO▪ Crossover-current protection▪ 3.3 and 5 V compatible logic supply▪ Thin profile QFN and TSSOP packages▪ Thermal shutdown circuitry▪ Short-to-ground protection▪ Shorted load protection▪ L ow current Sleep mode, < 10 μA▪ No smoke no fire (NSNF) compliance (ET package)图1.A4982功能方框图图2.A4982典型应用框图图3.A4982 LP封装应用电路和PCB布局框图图4.A4982 ET封装应用电路和PCB布局框图A4982 是一款完全的微步电动机驱动器,带有内置转换器,易于操作。
伺服说明书v
Ver 2.0克瑞斯伺服驱动器使用手册台州亿丰电子有限公司1.1 产品检查 (1)1.2 产品铭牌 (2)1.3 产品前面板 (2)1.4 驱动器技术规格 (4)1.5 伺服电机安装 (4)第二章接线 (5)2.1 系统组成与接线 (5)2.2 CN1 通信接口 (8)2.3 CN2 控制接口 (9)2.4 CN3 编码器接口 (14)2.3 标准接线 (15)第三章面板操作 (16)3.1 面板组成 (16)3.2 模式功换 (17)3.3 监控模式操作 (18)3.4 辅助模式操作 (18)3.5 用户参数模式操作 (22)第四章功能参数一览表 (23)4.1 参数设置面板操作 (23)4.2 参数一览表 (23)5.1 监控面板操作 (32)5.2 监控参数一览表 (32)第六章报警及处理 (33)6.1 报警清除操作 (33)6.2 警报内容与对策表 (34)第七章 MODBUS 通信功能 (36)7.1 MODBUS 通信简介 (36)7.2 通信协议结构 (38)7.3 常用命令码 (39)7.4 伺服参数、状态信息通信地址 (47)附录 (47)附录 A 位置/速度控制模式切换 (48)附录 B 内部位置控制 (48)附录 C 输入功能控制方式选择寄存器 (50)附录 D 输入功能逻辑状态设置寄存器 (51)附录 E 输出功能状态寄存器 (51)第一章产品检查及安装1.1 产品检查本产品在出厂前均做过完整功能测试,为防止产品运送过程中因疏忽导致产品不正常,拆封后请详细检查下列事项:● 检查伺服驱动器与伺服电机型号是否与订购的机型相同。
● 检查伺服驱动器与伺服电机外观有无损坏及刮伤现象。
运送中造成损伤时请勿接线送电。
● 检查伺服驱动器与伺服电机有无零组件松脱之现象。
是否有松脱的螺丝,是否螺丝未锁紧或脱落。
● 检查伺服电机转子轴是否能以手平顺旋转。
带制动器的电机无法直接旋转。
如果上述各项有了生故障或不正常的现象,请立即与经销商联系。
Agilent E4980A E4980A-2 光谱仪用户手册说明书

About this ManualWe’ve added this manual to the Agilent website in an effort to help you support your product. This manual is the best copy we could find; it may be incomplete or contain dated information. If we find a more recent copy in the future, we will add it to the Agilent website.Support for Your ProductAgilent no longer sells this product. Our service centers may be ableto perform calibration and repair if necessary, but no other support fromAgilent is available. You will find any other available product information on the Agilent Test & Measurement website, .HP References in this ManualThis manual may contain references to HP or Hewlett-Packard. Please note that Hewlett-Packard's former test and measurement, semiconductor products and chemical analysis businesses are now part of Agilent Technologies. We have made no changes to this manual copy. In other documentation, to reduce potential confusion, the only change to product numbers and names has been in the company name prefix: where a product number/name was HP XXXX the current name/number is now Agilent XXXX. For example, model numberHP8648A is now model number Agilent 8648A.。
Allegro MicroSystems

Allegro MicroSystems, LLC推出40V电机驱动器IC A5989
作者:暂无
来源:《汽车维修与保养》 2016年第10期
Allegro MicroSystems,LLC公司发布全新40V电机驱动器IC A5989,它能够驱动一个步进电机和一个直流电机。
A5989步进驱动器PWM电流调节器采用了Allegro公司专利的混合衰减模式(mixed-decay mode),以减少电机的可闻噪声,提高步进精度,并降低功耗。
这款直流电机驱动器能够以快速或慢速PWM衰减控制,在前进、后退、滑动和制动模式下工作。
A5989的保护功能包括带滞后的过热关断、欠压锁定(UVLO)、交叉电流、以及过流保护。
A5989还具有低电流睡眠模式以提升效率。
A5989采用无引线6mm×6mm×0.9mm,36引脚QFN封装供货,带有外露电源接片(power tab)以增强热性能。
【微计算机信息】_数控系统_期刊发文热词逐年推荐_20140722
107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140
传感器制造 优化方案 乘法器 串行通信 windows ce usb uc/os-ⅱ操作系统 tcp/ip sopc技术 s3c44box微处理器 rtlinux pwm控制 plc o代码 osaca nc代码 mpc5200 java 语言 g代码 gprs e2prom dde d/a转换 cpu cpld ch341a cgi程序 can cae模块 cad技术 arm串口 arm7 840d
科研热词 数控系统 单片机 运动控制器 步进电机 控制系统 嵌入式系统 dsp 远程监控 电路设计 数控机床 数控 插补 控制器 伺服系统 rtai cad/cam arm 齿轮组 飞利浦单片机 长度测量 锁相环 通信 逐点比较 远程监控系统 运动控制板 运动控制卡 运动控制 轴角编码器 轴盘类零件 软件控制系统 软件复用 超声检测 调度 设备驱动程序 计算机数字控制 计算机控制 触摸屏 解码 解析器 自动编程系统 自动控制 编译 累加极限 系统模型 系统仿真 精密进给 精密磨削 管理信息 移动agent 真实感图形 直线位移 电流源
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106
创动科技 M1 系列伺服驱动器产品说明书

6.3 伺服保修流程......................................................................................................................42 深圳创动科技有限公司维修品清单............................................................................................. 43
6.1 产品保修总则......................................................................................................................42 6.2 伺服保修时间......................................................................................................................42
3.产品安装与配线........................................................................................................................... 8
3.1 产品尺寸与安装...................................................................................................................8 3.1.1 驱动器尺寸与安装........................................................................................................8 3.1.2 电机尺寸与安装............................................................................................................9
DELTA ASDA-A2系列 高性能通讯型伺服驱动器 应用技术手册

如果您在使用上仍有问题,请咨询经销商或者本公司客服中心。
Revision May, 2011
i
序言ASDA-A2 系列
安全注意事项
ASDA-A2 系列为一高解析开放型(Open type)的伺服驱动器,操作时须安装于屏蔽式的控 制箱内。 本驱动器利用精密的反馈控制及结合高速运算能力的数字信号处理器 (Digital Signal PRocessor, DSP),来控制 IGBT 产生精确的电流输出,用来驱动三相永磁式同步交流伺服 电机(PMSM)以达到精准的定位。 ASDA-A2 系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱 动器、线材及电机都必须安装于符合 UL 环境等级 1 的安装环境最低要求规格)。 在接收检验、安装、配线、操作、维护及检查时,应随时注意以下安全注意事项。 标志「危险」、「警告」及「禁止」代表的涵义:
主电路配线
请不要将动力线和信号线从同一管道内穿过,也不要将其绑扎在一起。配线时, 请使动力线和信号线相隔 30 厘米(11.8 英寸)以上。 对于信号线、编码器(PG)反馈线,请使用多股绞合线以及多芯绞合整体屏蔽 线。对于配线长度,信号输入线最长为 3 米(9.84 英尺) ,PG 反馈线最长为 20 米(65.62 英尺) 。 即使关闭电源,伺服驱动器内部仍然可能会滞留高电压,请暂时(10 分钟)不 要触摸电源端子。并请确认「CHARGE」指示灯熄灭以后,再进行检查作业。 请不要频繁地开关电源。如果需要连续开关电源时,请控制在一分钟一次以下。
第三章
3.1
配线
周边装置与主电源回路连接............................................................................ 3-1
drv8848的用法
drv8848的用法DRV8848是一款全桥直流电机驱动器,它能够提供高电流和高效率的驱动能力。
它广泛应用于机器人、工业自动化、汽车电动驱动等领域。
本文将介绍DRV8848的用法以及相关参考内容,帮助读者了解该驱动器的特点和应用。
首先,我们将介绍DRV8848的特点和技术参数。
DRV8848是一款全集成的单片H桥驱动器,采用12-36V的电源供电。
它具有4个独立的驱动器接口,可实现针对不同类型电机的驱动控制。
这些接口可以方便地与微控制器或其他数字信号源相连接,实现电机驱动的控制和监测。
此外,DRV8848还具有过流和过温保护功能,可以防止电机和驱动器由于工作异常而受到损坏。
为了正确使用和配置DRV8848,用户可以参考官方提供的技术手册。
技术手册为用户提供了详细的介绍和说明,包括电路连接方式、信号输入和输出配置、驱动参数的选择和设置等。
手册还提供了一些实际的应用示例,以帮助用户理解和应用该驱动器。
在手册中,还包含了典型应用电路图、时序图和性能曲线等,有助于用户进行设计和调试。
除了官方技术手册,还有一些相关的参考资料可以帮助用户更好地理解和应用DRV8848。
例如,一些电子技术论坛和技术博客上的文章可以分享其他人的使用经验和技巧。
读者可以搜索相关主题,参考他人的经验来解决自己在使用DRV8848时遇到的问题。
同时,也可以参考一些电机驱动器的原理和设计手册,以扩大对电机驱动器工作原理和应用的理解。
另外,网上还有一些视频教程可以帮助用户学习DRV8848的用法。
这些视频通常包含实际的演示和操作步骤,对于学习和掌握该驱动器的使用非常有帮助。
用户可以在视频教程中看到实际的连线方法和配置步骤,了解不同电机驱动方式的示例,并可以根据需要进行调整和应用。
在使用DRV8848时,用户应该遵循一些基本的规范和注意事项。
首先,需要正确连接电源和地线,确保供电正常且安全。
其次,需要根据实际应用选择合适的驱动参数和操作模式,以便实现所需的电机控制效果。
E4980A 精密 LCR 表用户指南
注
上述制造号中“x”显示的编号位置表示版本号。
示例程序
为了便于内部使用,客户将拥有个人使用、复制或修改本手册中示例程序的权利, 但这种权利不可转让。客户可根据自己的用途独自使用示例程序,但不得许可、租赁、 买卖或散布示例程序,也不得对其中的任何部分进行修改。
是德科技将不对示例程序的质量、性能或运行状况负责。是德科技不保证示 例 程序的运行不间断或无差错。示例程序按照原样提供。
安全概述
当用户发现下列任何异常情况时,应立即终止操作并断开电源线。 维修仪器请与当地的是德科技销售代表或其授权的维修公司联系。如果不对仪器进行 维修而继续使用,则可能会给操作者带来失火或触电隐患。
- 仪器操作异常。 - 操作过程中,仪器发出异常噪音、异味、冒烟或电火花。 - 操作过程中,仪器产生高温或出现电击现象。 - 电源线、插头或仪器的插座受损。 - 外界物质或液体进入仪器。
3
警告 注意 注
安全符号
下面列出了仪器上或手册中使用的安全符号的一般定义。 维护手册符号:在需要用户参考仪器手册时,试用此符号表明。 交流。 直流。 接通(电源)。 切断(电源)。 按钮开关到位。 按钮开关复位。
机壳终端;与仪器机壳的连接,包括所有外露的金属结构。 待用。
这个警告标志表示危险。它提醒用户如果不正确执行或不遵守某个程序、操作规程 或条件,将会导致人员伤害或死亡。
字体约定
示例(黑体) 示例(斜体) [示例]键
示例菜单/按钮/方框
示例1-示例2-示例3
黑体字用于强调说明。
斜体字用于强调说前面板或外部键盘上的键)。 “键”可省略。
表示标有“示例”的屏幕上的菜单/按钮/方框,可 通过点击“菜单”、“按钮”或“方框”选择/执行 “示例”。菜单/按钮/方框可省略。
海德汉调试手册.

NC 版本: 340 49x-04 PLC 版本:Basic 54 HEIDENHAIN简明调试手册iTNC 530目录1,调试准备 (1)1.1本手册中标识的含义 (1)1.2 各模块概述 ...................................................................................................... 2 1.2.1 主计算机,硬盘, SIK .......................................................................................... 2 1.2.2 CC 控制单元 ........................................................................................................... 3 1.2.3UV106 B电源模块 ................................................................................................. 4 1.2.4 显示单元和键盘 . .................................................................................................... 5 1.2.5手轮 . ......................................................................................................................... 7 1.2.6 PLC 模块 ................................................................................................................ 8 1.2.7驱动模块 . .. (9)2, 系统连接 ........................................................................................... 10 2.1 一般信息 ........................................................................................................ 10 2.1.1 安全措施 . .............................................................................................................. 10 2.2硬盘(HDR 和 SIK 的安装 . ....................................................................... 11 2.3使用环境 ......................................................................................................... 13 2.3.1温度和湿度 . ........................................................................................................... 13 2.3.2空调 . ....................................................................................................................... 13 2.3.3机械振动 . ............................................................................................................... 14 2.3.4污染 . ....................................................................................................................... 14 2.3 安装空间 ........................................................................................................ 15 2.3.1一般信息 . ............................................................................................................... 15 2.3.2 MC 42x(C, CC42x(B, UV, UM, UE2xxB 安装空间 ......................................... 16 2.3.3显示器 . ................................................................................................................... 16 2.3电气设计重要事项 ......................................................................................... 17 2.3.1供电 . ....................................................................................................................... 17 2.3.2电气柜设计基本要求 . ........................................................................................... 17 2.3.3接地 . ....................................................................................................................... 17 2.4 电缆连接总图 ................................................................................................ 18 2.5 iTNC530连接概览 ..................................................................................... 23 2.6 供电 .............................................................................................................. 26 2.6.1 iTNC 530供电 . ................................................................................................... 26 2.6.2 系统内置 PLC 供电 ........................................................................................... 27 2.6.3 PLC 51x 扩展模块供电 ..................................................................................... 28 2.6.4 Control-Is-Ready 信号供电 . ............................................................................... 28 2.6.5 显示单元(BF 150供电 .. (28)i2.8 手轮 (29)2.8.1 HR 4xx便携式手轮 (30)2.9 PLC 输入信号 (31)3.9.1 输入信号和地址 . .................................................................................................. 31 2.9.2 MC 42x(C内置 PLC 输入信号 ......................................................................... 32 2.9.3 扩展模块 PL 510的输入点 ................................................................................. 33 2.10 PLC 输出信号 ........................................................................................... 34 2.11 PLC输入输出模块 ...................................................................................... 37 2.11.1 PLB511/PLB512 ................................................................................................. 38 2.12机床操作面板 ............................................................................................... 40 2.13 键盘单元 ...................................................................................................... 41 2.14 显示单元 ...................................................................................................... 42 2.15 驱动和电机的连接 ...................................................................................... 43 2.15.1 UV(R 1x0(D 电源模块 ................................................................................. 43 2.15.2 UM1xx(B(D驱动模块 ................................................................................... 47 2.15.3 电机 . .................................................................................................................. 49 2.16基本回路 MC_CC422_UV1xx_CMx .......................................................... 51 2.17 系统通电 (52)2.17.1 第一次通电 . (52)3, PLC 调试 (53)3.1 PLC软件的安装 (53)3.2海德汉 PLC 介绍 ........................................................................................... 54 3.2.1 PLCdesignNT软件 . ............................................................................................... 54 3.2.2 PLC基本程序简介 ............................................................................................... 56 3.3 PLC命令 ........................................................................................................ 57 3.3.1操作符类型 . ........................................................................................................... 57 3.3.2操作数 . ................................................................................................................... 58 3.4用户 PLC 程序的调试 ................................................................................... 60 3.4.1iTNC530编程站 PLC 程序编制 .......................................................................... 60 3.4.2 PLC举例 ............................................................................................................... 65 3.4.3 机床 PLC 程序编制 ............................................................................................. 68 3.5 PLC报警文本 ................................................................................................ 71 3.5.1 PLC 报警信息表结构 ........................................................................................... 71 3.5.2 举例PLC 报警信息 ............................................................................................. 72 3.6 PLC状态诊断 (78)4,驱动器和 NC 调试 . (81)4.2 基本参数的设定 (84)4.2.1编码器和机床 . (85)4.2.2 定位和控制 . (85)4.2.3主轴参数 . (86)4.2.4显示和硬件 . (87)4.3 NC的调试 ...................................................................................................... 87 4.3.1坐标轴及其速度和加速度 . ................................................................................... 87 4.3.2光栅尺和传动比的设定 . ....................................................................................... 88 4.3.3零点的设置 . ........................................................................................................... 89 4.3.4软限位 . ................................................................................................................... 93 4.3.5反向间隙补偿 . ....................................................................................................... 93 4.3.6丝杠螺距非线性误差补偿 . ................................................................................... 93 4.3.7 主轴的调试 . .......................................................................................................... 99 4.4 伺服优化准备 .............................................................................................. 100 4.4.1 TNCopt软件 . ....................................................................................................... 100 4.4.2 控制环原理介绍 . ................................................................................................ 102 4.5电流环优化 ................................................................................................... 102 4.5.1电流环优化准备 . ................................................................................................. 103 4.5.2手动优化电流环步骤:. ..................................................................................... 103 4.6速度环优化 ................................................................................................... 105 4.6.1速度环的脉冲响应 . ............................................................................................. 106 4.6.2速度环的阶跃响应 . ............................................................................................. 107 4.7前馈控制系数的优化 ................................................................................... 108 4.8 Kv系数优化 . ................................................................................................ 109 4.9圆周测试 (110)5,网络连接 (113)5.1设置 iTNC530数控系统的 IP 地址 . (113)5.2 个人电脑固定 IP 的设置步骤 (114)6,数据备份和恢复 (117)6.1数据备份 (117)6.2数据恢复 (121)7,机床参数表 (125)7.1“机床参数编辑”操作模式 ........................................................................ 125 7.2输入和输出机床参数 ................................................................................... 127 7.2.1输入格式 . ............................................................................................................. 127 7.2.2 激活机床参数列表 . .. (128)iii7.2.3 修改输入值 . .................................................................................................. 129 7.3 机床参数列表 . (130)7.3.1 编码器和机床 . (130)7.3.2 定位 . (134)7.3.3 使用速度前馈控制 . (139)7.3.4 使用跟随误差 . (140)7.3.5 速度和电流综合控制 . (141)7.3.6 主轴 . (148)7.3.7 内置 PLC (151)7.3.8 配置数据接口 . (154)7.3.9 3-D测头 (156)7.3.10 用 TT 测量刀具 . (158)7.3.11 攻丝 . (161)7.3.12 显示器和其操作 . (162)7.3.13 颜色 . (168)7.3.14 加工和程序运行 . (170)7.3.15 硬件 . (175)7.3.16 第二主轴 . (181)8, NC-PLC 接口 (183)8.1 Marker . (183)8.2 字和双字 (188)9,安装尺寸 (191)11,调试准备iTNC530是适用于镗、铣、加工中心类数控系统。
2014长安CS75全车维修手册3.1发动机-2.0L

Allegro步进电机驱动IC选型指南
A4982 A4983
8.0 至 35 8.0 至 35
2.0 安培 2.0 A
并行(转换器) 并行(转换器)
A4984
8.0 至 35
2.0 安培
并行(转换器)
A4985
A4988 A3980K A3981K A3986 A4980K A4989
型号
A3972 A3981K A3992 A4980K A3985
串行接口
输出电流范围 1.5 安培 1 安培 1.5 安培 1 安培
2 安培至 10 安培 (典型)
并行(转换器)
并行(转换器) 并行(转换器)
并行/SPI 并行(转换器)
并行/SPI 并行(转换器)
接口 串行 并行/SPI 串行 并行/SPI 串行
封装 DFN-10 QFN-20 SOIC-16
A3906SES
接口
750 毫安
并行(转换器)
A3977
8.0 至 35
2.5 安培
并行(转换器)
A3979 A3982 A3983 A3984
A3987
8.0 至 35 8.0 至 35 8.0 至 35 8.0 至 35
8.0 至 35
2.5 A 1.5 安培 1.5 安培 1.5 安培
1.5 安培
并行 (转换器) 并行(转换器) 并行(转换器) 并行 (转换器)
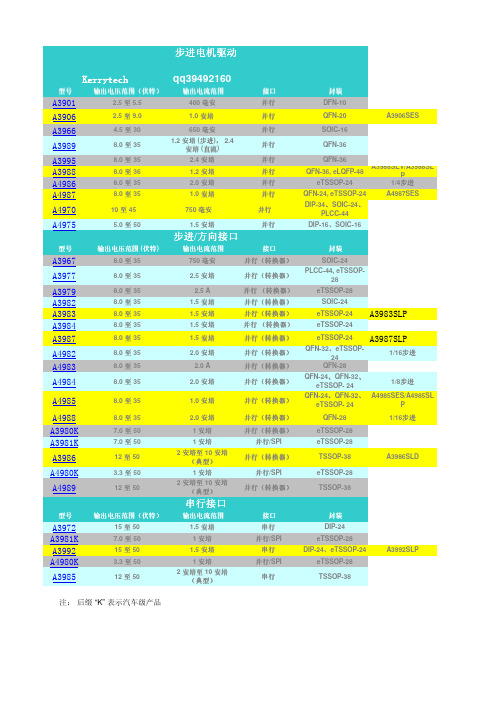
步进电机驱动kerrytech型号输出电压范围输出电压范围伏特伏特25455050qq39492160输出电流范围400毫安10安培接口并行并行封装dfn10a3906sesa3901a3906a3966a3988a4986a4987型号输出电压范围伏特8050a3977a3979a3982a3983a3987a4982a4983a4985a4988a3980ka3981ka4989型号650毫安并行12安培步进24并行安培直流24安培并行12安培并行20安培并行10安培并行750毫安并行15安培并行步进方向接口输出电流范围接口750毫安并行并行转换器转换器25安培25a15安培15安培15安培15安培20安培20a20安培10培20安培1安培1安培2安培至10安培典型典型安培2安培至10安培典型典型并行并行转换器转换器并行转换器转换器并行并行转换器转换器并行并行转换器转换器并行转换器转换器qfn20soic16qfn36qfn36qfn36elqfp48etssop24qfn24etssop24dip34soic24plcc44dip16soic16a3988seva3988sl14步进a4987ses封装soic24plcc44etssop28etssop28soic24etssop24etssop24etssop24qfn32etssop24qfn28qfn24qfn32etssop24a3983slpa3987slp116步进并行并行转换器转换器并行并行转换器转换器并行并行转换器转换器并行并行转换器转换器转换器并行并行转换并行并行转换器转换器并行并行转换器转换器并行spi行并行转换器转换器并行spi并行并行转换器转换器18步进qfn24qfn32a4985sesa4985sletssop24pqfn28etssop28etssop28tssop38etssop28tssop38a3986sld116步进串行接口输出电压范围输出电压范围伏特伏特1550输出电流范围15安培1安培15安培1安培2安培至10安培典型典型接口串行并行spi串行并行spi串行封装dip24a3992slpa3972a3981ka3992a4980ka3985etssop28dip24etssop24etssop28tssop38
汽车仪表盘方案.

主要应用
汽车音响
优势
专为严酷的汽车环境设计,抗干扰能力强 输入耐压高,适合功率放大
汽车喇叭
汽车仪表盘
电源选型 POWER LDO
产品型号
输入电压 (V)
输出电压 (V)
电压精 输出电 度(%) 流(mA)
静态电 流
(uA)
TLE4275-Q1
专为严酷的汽车环境(过温度保护., 过压, ...) 可替代 TLE4275G
GND
TLE4275Q1
基本应用
各种汽车电子客户项目 仪表盘、车身控制等.
IN RST GND DELAY OUT
BD3931FP-E2-低功耗高性能LDO
BD3931FP-E2特性描述: • 输入电压:—36V(MAX:50V) • 高输出电压精度:5.0V±2%。 • 静态电流仅为30uA。 • 内部有热关断监测功能。 • 外部电源反接保护功能。 • 内部具有过流保护电路。 • 内部具有过压保护电路。 • 工作温度:-40― +125℃。 • 多封装形式:TO252-3。
CAN
SN65HVD1040A-Q1
MCU
TMS470(ARM7) Stellaris M3
步进驱动与控制
TFT 或 LCD 控制器
晶振 DST410S
LED 驱动 ULQ2003-Q1 TLC5916-Q1
LED 灯 Rohm
步进马达
显示
TFT 或 LCD 显示 驱动-电源
TPS61041-Q1
普遍推广
主要应用市场:
汽车电子(汽车仪表盘)
TLC5916/17 and TLC5926/27 多功能恒定电流 LED driver
信捷伺服手册
DP4985完美替代A4985

深圳市福田区振中路国利大厦B座1139-1142室
www.dn- Page 1 of 17 11/2013, V0.2
深圳市动能世纪科技有限公司
4 98 5
内置转换器的微步进电机驱动芯片
电路工作极限 at Ta = 25°C
Parameter
Load Supply Voltage Output Current Logic Input voltage Logic Supply voltage Motor Output Votage Sense Voltage Reference Voltage Operating Ambient Temperature Maximum Junction Storage Temperature VSENSE VREF TA TJ(max) Tstg Range S
深圳市动能世纪科技有限公司
描述 DP4985是一种便于使用的内部集成了译码器的微步 进电机驱动器。 其设计为使双极步进电机能够以全、 半、 1/4和1/8步进操作。 步进模式由逻辑输入MSx选择。 输出 驱动能力达到35V和±1A。 DP4985包括一个能够控制慢或 混合衰减模式的电流调节器,其截止时间固定。 译码器是DP4985易于实施的关键。通过STEP简单的 输入一个脉冲就可以使电机完成一次步进,省去了相序 表,高频控制线及复杂的编程接口。这使其更适于应用 在没有复杂的微处理器或微处理器负担过重的场合。 在步进操作期间,DP4985的内部电路可以自动的控 制其PWM操作工作在快、 慢及混合衰减模式。 在混合衰减 模式下,器件初始经过一段时间的快衰减后,将切换至 慢衰减模式直至固定截止时间结束。混合衰减模式控制 不但降低了电机工作时产生的噪声,还增加了步进的准 确性,同时减小了系统的功耗。 内部的同步整流控制电路改善了PWM操作时的功耗。 内部保护电路包括:利用迟滞实现的过热关机、欠压锁 定及交叉电流保护。不需要特别的加电排序。 DP4985目前提供一种贴片封装:带有裸露焊盘的 QFN-24封装,能有效改善散热性能,且是无铅产品,引 脚框采用100%雾锡电镀。 型号选择
浩达力电力驱动器(DC驱动器)零件清单说明书

PowerFlex DC Drive SPARE PARTS LIST Rev V.1Models 20P41AD4P1RA0NNN ….20P41AD1K4RA0NNN (480VAC / 4Q)AA A A A A BBBBCCDDDDD4,1 / 227 / 1535 / 2073 / 4086 / 50100 / 60167 / 100207 / 125250 / 150330 / 200495 / 300667 / 400830 / 500996 / 6001162 / 7001238 / 8001494 / 9006 / 345 / 25129 / 75412 / 25010 / 552 / 3014 / 7.519 / 1020P-S520L 20P-S520L A 115VAC to 24VDC 8 channel I/O converter board 1111111111111111120P-S551LRA PN-81821115VAC to 24VDC 12 channel I/O converter board 20P-S5V6220P-S5V62 A TBO-32 I/O Expansion board 11111111111111111SK-20P-4S9S14PN-54735Snubber Capacitor, 1,5uF 850Vac 666SK-20P-4S9S15PN-54736Snubber Capacitor, 2,2uF 850Vac66SK-20P-4S9S19PN-54737FAN Motor-run Capacitor, 12uF 400Vac11111SK-20P-F4M15PN-54739FUSE Ferrule 22x58mm, for field, 50A 600V 22SK-20P-F4M21PN-54742FUSE Ferrule 22x58mm, for field, 100A 600V222SK-20P-S577N PN-54744FIR-D-50 Pulse Transformer Board, 230Vac & 460 regen drive 11111SK-20P-S5D37PN-54748FNLS Fan loss detector board11111SK-20P-S5H08SK-20P-S5H08 A Main Control Bd (R-PFX) Interf. Ribbon Cable (20 conductor) to Cover Assembly 11111111111111111SK-20P-S5H95SK-20P-S5H95 A PBB-4B Power traces board 111SK-20P-S5N03SK-20P-S5N03 A SW1-31 Switching Power Supply Board 11111111111SK-20P-S5N10SK-20P-S5N10 A SW2-32 Switching Power Supply Board1111 SK-20P-S5N14SK-20P-S5N14 A SN5-31 AC Line Snubber Board, 460VAC drive111111SK-20P-S5N15SK-20P-S5N15 A FL-31 Transient Noise Filter Board, 230 & 460VAC drive 11SK-20P-S5N18SK-20P-S5N18 A FIR2-51 Pulse Transformer Board, 460VAC regen drive 1111SK-20P-S5N20SK-20P-S5N20 A SN-FC Field Snubber Board11SK-20P-S5N21SK-20P-S5N21 A FIR3-32 4B Pulse Transformer Board, 230 & 460VAC regen drive 11SK-20P-S5N22SK-20P-S5N22 A CN3 Power supply filter board 11SK-20P-S5N24SK-20P-S5N24 A PFC1A-32 Field board 111111SK-20P-S5N25SK-20P-S5N25 A PFC2A-31 Field board1111SK-20P-S5N62SK-20P-S5N62 A FIR1-51 Pulse Transformer Board, 460VAC regen drive, obsolete, use: SK-20P-S5N1211SK-20P-S5N63SK-20P-S5N63 A FIR1-52 Pulse Transformer Board, 460VAC regen drive, obsolete, use: SK-20P-S5N171111SK-20P-S5N12PN-92781FIR1-51 Pulse transformer board, 460VAC regen drive 11SK-20P-S5N17PN-92783FIR1-52 Pulse transformer board, 460VAC regem drive 1111SK-20P-S5N70PN-54758PFC40 Field board, 40Adc max.11SK-20P-S5N73PN-54761PFC70 Field board, 70Adc max.111SK-20P-S5N97SK-20P-S5N97 A SW3-32 Switching Power Supply Board 11SK-20P-S5N99PN-54762CFSF461 Overvoltage clipping board11111SK-20P-S5RP1SK-20P-S5RP1 A R-PFX32 Main Control - Regulation board 11111111111111111SK-20P-S7169SK-20P-S7169 A FUSE Ferrule 5x20mm fast, switching supply, 3,15A 250V 111111SK-20P-S725723PN-54778 4 SCR leg assembly, 2HS-PF-4Q-1K6V-830A 3SK-20P-S725724PN-54779 4 SCR leg assembly, 2HS-PF-4Q-1K6V-996A 3SK-20P-S725725PN-54780 4 SCR leg assembly, 2HS-PF-4Q-1K6V-1162A 3SK-20P-S725726PN-54781 4 SCR leg assembly, 2HS-PF-4Q-1K6V-1328A 3SK-20P-S725727PN-54782 4 SCR leg assembly, 2HS-PF-4Q-1K6V-1494A3SK-20P-S725802PN-210106FAN Assembly, F280, 460Vac, used in frame D, series B drives11111SK-20P-S725804PN-297701Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series C drives .11111SK-20P0S725805PN-297720Retrofit Kit for Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series B drives to convert to Series C.11111SK-20P-S725806PN-297715Retrofit Kit for Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series A drives to convert to Series C. 11111SK-20P-S5D41PN-223015DC Fan Board, 400-460Vac, 50/60Hz, used in Frame D, series B and C drives 11111SK-20P-S725801PN-54797FAN Assembly, F280, 230Vac, 2400m 3/h used in frame D, series A drives11111SK-20P-S726171PN-54798Bus bar extension for U V W power terminals, 10x100mm (required for UL installations)111SK-20P-S737F SK-20P-S737F A Module SCR2 for Armature, 460VAC drive, 1K6V 320A66 SK-20P-S75BT PN-54801Upper Cover, Black, A frame only 111111SK-20P-S764L PN-54802Bezel, Black, for PFDC Cover Assembly11111111111SK-20P-S771F SK-20P-S771F A Module SCR2 for Armature, 460VAC drive, 1K6V 500A 6SK-20P-S777H SK-20P-S777H A AC Current Transducer ETI 1168, 600A / 0,2A 2222SK-20P-S779F PN-54806Module DIODE2 for Field, 1K6V 99A 11SK-20P-S77BT PN-54807Lower Cover, Grey, A frame only 111111SK-20P-S785F PN-54808Module DIODE2 for Field, 1K6V 120A111SK-20P-S78H0SK-20P-S78H0 A AC Current Transducer ETI 1188, 200A / 0,1A 222222SK-20P-S799F SK-20P-S799F A Module DIODE2 for Field, 1K6V 40A 111111SK-20P-S79F1SK-20P-S79F1 A Module D/SCR5 for Field, 1K6V 28A 1111SK-20P-S79F3SK-20P-S79F3 A Module D/SCR5 for Field, 1K6V 15A 11SK-20P-S7F41SK-20P-S7F41 A Module SCR2 for Armature, 460VAC drive, 1K6V 210A 6SK-20P-S7F73SK-20P-S7F73 A Module SCR2 for Arm & Field, 1K6V 25A 6111111SK-20P-S7F74SK-20P-S7F74 A Module SCR2 for Armature, 460VAC drive, 1K6V 40A 66SK-20P-S7F75SK-20P-S7F75 A Module SCR2 for Arm & Field, 1K6V 55A 6611SK-20P-S7F77SK-20P-S7F77 A Module SCR2 for Arm & Field, 1K6V 90A6111SK-20P-S7F78SK-20P-S7F78 A Module SCR2 for Armature, 460VAC drive, 1K6V 130A 6SK-20P-S7F79SK-20P-S7F79 A Module SCR2 for Armature, 460VAC drive, 1K6V 160A 6SK-20P-S7G17SK-20P-S7G17 A FAN F150x55 230VAC, 191 cfm 33SK-20P-S7G29SK-20P-S7G29 A BIMETAL THERMOSTAT, 80°C ± 32SK-20P-S7G30SK-20P-S7G30 A BIMETAL THERMOSTAT 90°C ±333SK-20P-S7G33SK-20P-S7G33 A BIMETAL THERMOSTAT, 85°C ±311222SK-20P-S7G37SK-20P-S7G37 A BIMETAL THERMOSTAT, 85°C ±311Catalog NumberSAP Part #DescriptionFrame SizesArmature current [A ] / Power [HP ] sizesModels 20P41AD4P1RA0NNN ….20P41AD1K4RA0NNN (480VAC / 4Q)AA A A A A BBBBCCDDDDD4,1 / 227 / 1535 / 2073 / 4086 / 50100 / 60167 / 100207 / 125250 / 150330 / 200495 / 300667 / 400830 / 500996 / 6001162 / 7001238 / 8001494 / 9006 / 345 / 25129 / 75412 / 25010 / 552 / 3014 / 7.519 / 10Catalog NumberSAP Part #DescriptionFrame SizesArmature current [A ] / Power [HP ] sizesSK-20P-S7G49PN-54812FUSE Ferrule 14x51mm, for Overvoltage Clipping Bd. (CFSFXXX), 10A 690V 33333SK-20P-S7G71SK-20P-S7G71 A FAN 119x119x32 24VDC, 100 cfm 111222SK-20P-S7G76SK-20P-S7G76 A FAN 80x80x25 24VDC, 37 cfm 1SK-20P-S7G78SK-20P-S7G78 A FAN F150x55 24VDC, 212 cfm2SK-20P-S7G84PN-38189Fuse holder on Switching Power Supply Bd. (SW1, SW2, SW3 -board)22222222222211111SK-20P-S7GA0SK-20P-S7GA0 A BIMETAL THERMOSTAT, 70°C ±31SK-20P-S7GA1SK-20P-S7GA1 A BIMETAL THERMOSTAT, 80°C ±31SK-20P-S7GA9PN-54813BIMETAL THERMOSTAT 100°C ±311111SK-20P-S7H22SK-20P-S7H22 A AC Current Transducer TAS2, 1600A / 0,4A 22222SK-20P-S7H23PN-54815AC Current Transducer TAS2, 2400A / 0,5A22SK-20P-S7K9K PN-54816EAM 1251_5 Ribbon cable, 34 conductor, 220mm (FIR-X to R-PFX)(Pulse Transformer Bd to Main Control Bd)11SK-20P-S7P1J PN-54817EAM 1374_16 Ribbon cable, 34 conductor, 160mm (FIR-X to R-PFX)(Pulse Transformer Bd to Main Control Bd)1111SK-20P-S7P1V PN-54818EAM 1408_1 Ribbon cable, 6 conductor, 310mm (PFC-X to R-PFX)(Field Board to Main Control Bd)111111SK-20P-S7P3V PN-54820EAM 1374_7 Ribbon cable, 34 conductor, 130mm (FIR-X to R-PFX)(Pulse Transformer Bd to Main Control Bd)111111SK-20P-S7P4V PN-54821EAM 1374_8 Ribbon cable, 16 conductor, 160mm (SW-X to R-PFX)(Switching Power Supply Bd to Main Control Bd)1111111111SK-20P-S7P7K PN-54822EAM 1408_5 Ribbon cable, 6 conductor, 350mm (PFC-X to R-PFX)(Field Board to Main Control Bd)111111SK-20P-S7W0W PN-54823EAM 1251_4 Ribbon cable, 16 conductor, 100mm (SW-X to R-PFX)(Switching Power Supply Bd to Main Control Bd)11SK-20P-S713748PN-80430EAM 1374_38 Ribbon cable, 16 conductor, 450mm (SW-X to R-PFX)(Switching Power Supply Bd to Main Control Bd)11111SK-20P-S713749PN-80431EAM 1374_39 Ribbon cable, 34 conductor, 570mm (FIR-X to R-PFX)(Pulse Transformer Bd to Main Control Bd)11111SK-20P-S714088PN-80432EAM 1408_18 Ribbon cable, 6 conductor, 800mm (PFC-X to R-PFX)(Field Board to Main Control Bd)11111SK-20P-S7P3U PN-80434EAM 1406_1 Twisted pair cable, 2 conductor, AWG22, 510mm (PFC-X to FIR-X)(Field Board to Pulse Transformer Bd)11111SK-20P-S714402PN-80435EAM 1440_2 Cable, 2 conductor, AWG22, 100mm (SW-X to FIR-X)(Switching Power Supply Bd to Pulse Transformer Bd)11111SK-20P-S724682PN-80437EAM 2468_2 Twisted pair cable, 4 pole, AWG22, 600mm (Gating Field SCR T1F, T2F)11111SK-20P-S713043PN-80438EAM 1304_3 Cable, 2 conductor, AWG18, 1340mm (Fuse switch to FIR-X)(Fuse switch to Pulse Transformer Bd)11111SK-20P-S714442PN-80440EAM 1444-2 Twisted pair cable, 4 conductor, AWG22, 1800mm (CT to FIR-X)(CT to Pulse Transformer Bd)11111SK-20P-S723831PN-80442EAM 2383_1 Cable, 2 conductor, AWG22, 920mm (Thermostat to FIR-X)(Thermostat to Pulse Transformer Bd)11111SK-20P-S726421PN-80443EAM 2642_1 Cable, 3 conductor, AWG16, 900mm (CFSF-X to FIR-X)(Overvoltage Clipping Bd to Pulse Transformer Bd)11111SK-20P-S726136PN-80445EAM 2613_6 Cable, 4 conductor, AWG18, 1300mm (CD term. to FIR-X)(CD term. to Pulse Transformer Bd)11111SK-20P-S726137PN-80448EAM 2613_7 Cable, 4 conductor, AWG18, 900+1450mm (CD to CFSF-X to FIR-X)(CD to Overvoltage Clipping Bd to Pulse Transformer Bd)11111SK-20P-S726141PN-80456EAM 2614_1 Twisted pair cable, 4 pole, AWG20, 780mm (Gating T1, T01 4Q drives)11111SK-20P-S726142PN-80459EAM 2614_2 Twisted pair cable, 4 pole, AWG20, 980mm (Gating T2, T02 4Q drives)11111SK-20P-S726143PN-80460EAM 2614_3 Twisted pair cable, 4 pole, AWG20, 1130mm (Gating T3, T03 4Q drives)11111SK-20P-S726144PN-80461EAM 2614_4 Twisted pair cable, 4 pole, AWG20, 910mm (Gating T4, T04 4Q drives)11111SK-20P-S726145PN-80462EAM 2614_5 Twisted pair cable, 4 pole, AWG20, 1080mm (Gating T5, T05 4Q drives)11111SK-20P-S726146PN-80463EAM 2614_6 Twisted pair cable, 4 pole, AWG20, 1310mm (Gating T6, T06 4Q drives)11111SK-20P-S7ZRZ PN-54824Discharge Resistor, 1k5R 100W 44444SK-20P-S813G PN-54825Inrush limiting Resistor, 10R 75W 11111SK-20P-S815G PN-54827Snubber Resistor, 18R 280W 66SK-20P-S816G PN-54828Snubber Resistor, 22R 180W 666SK-20P-S81N1RA PN-38182Ckt bd conn., kit Frame A 111111SK-20P-S81N2RA PN-38183Ckt bd conn., kit Frame B 1111SK-20P-S81N3RA PN-38184Ckt bd conn., kit Frame C 11SK-20P-S81N6RA PN-80467Ckt bd conn., kit Frame D11111SK-20P-S81N4RA PN-38186Ckt bd conn., kit I/O Board only11111111111111111SK-20P-S81N5RA PN-38187Ckt bd conn., kit converter bd (8 chn)11111111111111111SK-20P-S81N7RA PN-80470Ckt bd conn., kit converter bd (12 chn)11111111111111111SK-20P-S821B SK-20P-S821B A FUSE Ferrule 6x32mm, 25A 500V 33SK-20P-S823B SK-20P-S823B A FUSE Ferrule 10x38mm, 25A 600V 222222SK-20P-S824B SK-20P-S824B A FUSE Ferrule 6x32mm, 16A 500V2222223333SK-20P-S825B SK-20P-S825B A FUSE sq. body, high speed 170M5462, 630A 700V 6SK-20P-S826B SK-20P-S826B A FUSE sq. body, high speed 170M5464, 800A 700V6SK-20P-S85B9PN-54837Field fuse holder, 2-poles, 22x58mm fuses, frame D drives11111Models 20P41AD4P1RA0NNN ….20P41AD1K4RA0NNN (480VAC / 4Q)AA A A A A BBBBCCDDDDD4,1 / 227 / 1535 / 2073 / 4086 / 50100 / 60167 / 100207 / 125250 / 150330 / 200495 / 300667 / 400830 / 500996 / 6001162 / 7001238 / 8001494 / 9006 / 345 / 25129 / 75412 / 25010 / 552 / 3014 / 7.519 / 10Catalog NumberSAP Part #DescriptionFrame SizesArmature current [A ] / Power [HP ] sizesSK-20P-S85C1PN-54839FUSE square body stud-mount, high speed, for armature leg, 1000A 700V 6SK-20P-S85C2PN-54840FUSE square body stud-mount, high speed, for armature leg, 1400A 700V 6SK-20P-S85C3PN-54841FUSE square body stud-mount, high speed, for armature leg, 800A 700V 6SK-20P-S86C2PN-54853FUSE square body stud-mount, high speed, for armature leg, 1100A 700V 6SK-20P-S86C3PN-54854FUSE square body stud-mount, high speed, for armature leg, 1250A 700V 6SK-20P-S8B28SK-20P-S8B28 A FUSE Ferrule 5x20mm slo-blow, switching supply, 1A 250V 111111SK-20P-S8B29SK-20P-S8B29 A FUSE Ferrule 5x20mm slo-blow, switching supply, 2,5A 250V 11111111111SK-20P-S8N04PN-38190Field fuse holder, frame A drive.222222222222SK-20P-S8N29PN-38191Field fuse holder, frame B & C drives.222222222222SK-DC1-CVR1-A1PN-C10434PFDC Cover Assembly - HIM Cradle (common on all Frames)11111111111111111Remark: External high speed power fuses are listed on file "Fuses for PowerFlex DC.xls".Color Code:Not For Sale Obsolete Accessory NewNo external fuses required. Armature leg fuses and fieldPowerFlex DC Drive SPARE PARTS LIST Rev V.1Models 20P41AE067RA0NNN ….20P41AE1K6RA0NNN (575VAC / 4Q)B B B B BC CD D D D D67 / 50101 / 75135 / 100270 / 200405 / 300540 / 400675 / 500810 / 6001080 / 8001215 / 9001350 / 10001668 / 1250 20P-S520L20P-S520L A115VAC to 24VDC 8 channel I/O converter board11111111111120P-S551LRA PN-81821115VAC to 24VDC 12 channel I/O converter board20P-S5V6220P-S5V62 A TBO-32 I/O Expansion board111111111111SK-20P-4S9S13PN-54734Snubber Capacitor, 1uF 850Vac666SK-20P-4S9S14PN-54735Snubber Capacitor, 1,5uF 850Vac66SK-20P-4S9S19PN-54737FAN Motor-run Capacitor, 12uF 400Vac11111SK-20P-F4M15PN-54739FUSE Ferrule 22x58mm, for field, 50A 600V22222SK-20P-S578N PN-54745FIR-D-69 Pulse Transformer Board, 575 & 690VAC regen drive11111SK-20P-S5D37PN-54748FNLS Fan loss detector board11111SK-20P-S5H08SK-20P-S5H08 A Main Control Bd (R-PFX) Interf. Ribbon Cable (20 conductor) to Cover Assembly111111111111SK-20P-S5N03SK-20P-S5N03 A SW1-31 Switching Power Supply Board11111SK-20P-S5N10SK-20P-S5N10 A SW2-32 Switching Power Supply Board11111SK-20P-S5N20SK-20P-S5N20 A SN-FC Field Snubber Board11SK-20P-S5N22SK-20P-S5N22 A CN3 Power supply filter board11SK-20P-S5N25SK-20P-S5N25 A PFC2A-31 Field board, 20Adc max11111SK-20P-S5N421PN-54749FIR2-61 Pulse Transformer Board, 575VAC regen drive11111SK-20P-S5N423PN-54751FIR3-327 Pulse Transformer Board, 575 & 690VAC regen drive11SK-20P-S5N425PN-54753SN7-32 AC Line Snubber Capacitor Board, 0,22uF, 575 & 690VAC drive111SK-20P-S5N426PN-54754FL-57 Transient Noise Filter Board, 575VAC drive11SK-20P-S5N428PN-54756SN7-33 AC Line Snubber Capacitor Board, 0,33uF, 575 & 690VAC drive1111SK-20P-S5N70PN-54758PFC40 Field board, 40Adc max11111SK-20P-S5N97SK-20P-S5N97 A SW3-32 Switching Power Supply Board11SK-20P-S5N99PN-54762CFSF461 Overvoltage clipping board1111SK-20P-S5O50PN-54763CFSF462 Overvoltage clipping board1SK-20P-S5RP1SK-20P-S5RP1 A R-PFX32 Main Control - Regulation board111111111111SK-20P-S7257210PN-81848 4 SCR leg assembly, 2HS-PF-4Q-1K8V-1215A3SK-20P-S7257211PN-81849 4 SCR leg assembly, 2HS-PF-4Q-1K8V-1350A3SK-20P-S7257212PN-81850 4 SCR leg assembly, 2HS-PF-4Q-1K8V-1688A3SK-20P-S725728PN-54783 4 SCR leg assembly, 2HS-PF-4Q-1K8V-810A3SK-20P-S725729PN-54784 4 SCR leg assembly, 2HS-PF-4Q-1K8V-1080A3SK-20P-S725802PN-210106FAN Assembly, F280, 460Vac, used in frame D, series B drives1111SK-20P-S725804PN-297701Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series C drives . 1111SK-20P0S725805PN-297720Retrofit Kit for Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series B drives to convert to Series C.1111SK-20P-S725806PN-297715Retrofit Kit for Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series A drives to convert to Series C. 1111SK-20P-S5D41PN-223015DC Fan Board, 400-460Vac, 50/60Hz, used in Frame D, series B and C drives1111SK-20P-S725801PN-54797FAN Assembly, F280, 230Vac, 2400m3/h used in frame D, series A drives11111SK-20P-S726171PN-54798Bus bar extension for U V W power terminals, 10x100mm (required for UL installations)111SK-20P-S726172PN-54799Bus bar extension for U V W power terminals, 5x100mm (required for UL installations)1SK-20P-S726173PN-54800Bus bar extension for C D power terminals, 10x100mm (required for UL installations)1SK-20P-S764L PN-54802Bezel, Black, for PFDC Cover Assembly111111111111SK-20P-S777H SK-20P-S777H A AC Current Transducer ETI 1168, 600A / 0,2A22222SK-20P-S779F PN-54806Module DIODE2 for Field, 1K6V 99A11111SK-20P-S799F SK-20P-S799F A Module DIODE2 for Field, 1K6V 40A1111111SK-20P-S79F7PN-54809Module SCR2 for Armature, 575VAC drive, 1K8V 130A666SK-20P-S79F9PN-54810Module SCR2 for Armature, 575VAC drive, 1K8V 320A6SK-20P-S79G0PN-54811Module SCR2 for Armature, 575VAC drive, 1K8V 500A66SK-20P-S7F73SK-20P-S7F73 A Module SCR2 for Arm & Field, 1K6V 25A1111111SK-20P-S7F75SK-20P-S7F75 A Module SCR2 for Arm & Field, 1K6V 55A11111SK-20P-S7G17SK-20P-S7G17 A FAN F150x55 230VAC, 191 cfm33SK-20P-S7G29SK-20P-S7G29 A BIMETAL THERMOSTAT, 80°C ± 32SK-20P-S7G30SK-20P-S7G30 A BIMETAL THERMOSTAT 90°C ±333SK-20P-S7G33SK-20P-S7G33 A BIMETAL THERMOSTAT, 85°C ±32222SK-20P-S7G49PN-54812FUSE Ferrule 14x51mm, for Overvoltage Clipping Bd. (CFSFXXX), 10A 690V33333SK-20P-S7G71SK-20P-S7G71 A FAN 119x119x32 24VDC, 100 cfm2222SK-20P-S7G78SK-20P-S7G78 A FAN F150x55 24VDC, 212 cfm2SK-20P-S7G84PN-38189Fuse holder on Switching Power Supply Bd. (SW1, SW2, SW3 -board)222222211111SK-20P-S7GA9PN-54813BIMETAL THERMOSTAT 100°C ±311111SK-20P-S7H22SK-20P-S7H22 A AC Current Transducer TAS2, 1600A / 0,4A22222SK-20P-S7H23PN-54815AC Current Transducer TAS2, 2400A / 0,5A22SK-20P-S7ZRZ PN-54824Discharge Resistor, 1k5R 100W44444SK-20P-S7K9K PN-54816EAM 1251_5 Ribbon cable, 34 conductor, 220mm (FIR-X to R-PFX)(Pulse Transformer Bd toMain Control Bd)11SK-20P-S7P1J PN-54817EAM 1374_16 Ribbon cable, 34 conductor, 160mm (FIR-X to R-PFX)(Pulse Transformer Bdto Main Control Bd)11111SK-20P-S7P4V PN-54821EAM 1374_8 Ribbon cable, 16 conductor, 160mm (SW-X to R-PFX)(Switching Power SupplyBd to Main Control Bd)11111SK-20P-S7P7K PN-54822EAM 1408_5 Ribbon cable, 6 conductor, 350mm (PFC-X to R-PFX)(Field Board to MainControl Bd)1111111Catalog Number SAP Part #DescriptionFrame SizesArmature current [A] / Power [HP] sizesModels 20P41AE067RA0NNN ….20P41AE1K6RA0NNN (575VAC / 4Q)BBBBB CCDDDDD67 / 50101 / 75135 / 100270 / 200405 / 300540 / 400675 / 500810 / 6001080 / 8001215 / 9001350 / 10001668 / 1250Catalog NumberSAP Part #DescriptionFrame SizesArmature current [A ] / Power [HP ] sizesSK-20P-S7W0W PN-54823EAM 1251_4 Ribbon cable, 16 conductor, 100mm (SW-X to R-PFX)(Switching Power Supply Bd to Main Control Bd)11SK-20P-S713748PN-80430EAM 1374_38 Ribbon cable, 16 conductor, 450mm (SW-X to R-PFX)(Switching Power Supply Bd to Main Control Bd)11111SK-20P-S713749PN-80431EAM 1374_39 Ribbon cable, 34 conductor, 570mm (FIR-X to R-PFX)(Pulse Transformer Bd to Main Control Bd)11111SK-20P-S714088PN-80432EAM 1408_18 Ribbon cable, 6 conductor, 800mm (PFC-X to R-PFX)(Field Board to Main Control Bd)11111SK-20P-S7P3U PN-80434EAM 1406_1 Twisted pair cable, 2 conductor, AWG22, 510mm (PFC-X to FIR-X)(Field Board to Pulse Transformer Bd)11111SK-20P-S714402PN-80435EAM 1440_2 Cable, 2 conductor, AWG22, 100mm (SW-X to FIR-X)(Switching Power Supply Bd to Pulse Transformer Bd)11111SK-20P-S724682PN-80437EAM 2468_2 Twisted pair cable, 4 conductor, AWG22, 600mm (Gating Field SCR T1F, T2F)11111SK-20P-S713043PN-80438EAM 1304_3 Cable, 2 conductor, AWG18, 1340mm (Fuse switch to FIR-X)(Fuse switch to Pulse Transformer Bd)11111SK-20P-S714442PN-80440EAM 1444-2 Twisted pair cable, 4 conductor, AWG22, 1800mm (CT to FIR-X)(CT to Pulse Transformer Bd)11111SK-20P-S723831PN-80442EAM 2383_1 Cable, 2 conductor, AWG22, 920mm (Thermostat to FIR-X)(Thermostat to Pulse Transformer Bd)11111SK-20P-S726421PN-80443EAM 2642_1 Cable, 3 conductor, AWG16, 900mm (CFSF-X to FIR-X)(Overvoltage Clipping Bd to Pulse Transformer Bd)11111SK-20P-S726136PN-80445EAM 2613_6 Cable, 4 conductor, AWG18, 1300mm (CD term. to FIR-X)(CD term. to Pulse Transformer Bd)11111SK-20P-S726137PN-80448EAM 2613_7 Cable, 4 conductor, AWG18, 900+1450mm (CD to CFSF-X to FIR-X)(CD to Overvoltage Clipping Bd to Pulse Transformer Bd)11111SK-20P-S726141PN-80456EAM 2614_1 Twisted pair cable, 4 pole, AWG20, 780mm (Gating T1, T01 4Q drives)11111SK-20P-S726142PN-80459EAM 2614_2 Twisted pair cable, 4 pole, AWG20, 980mm (Gating T2, T02 4Q drives)11111SK-20P-S726143PN-80460EAM 2614_3 Twisted pair cable, 4 pole, AWG20, 1130mm (Gating T3, T03 4Q drives)11111SK-20P-S726144PN-80461EAM 2614_4 Twisted pair cable, 4 pole, AWG20, 910mm (Gating T4, T04 4Q drives)11111SK-20P-S726145PN-80462EAM 2614_5 Twisted pair cable, 4 pole, AWG20, 1080mm (Gating T5, T05 4Q drives)11111SK-20P-S726146PN-80463EAM 2614_6 Twisted pair cable, 4 pole, AWG20, 1310mm (Gating T6, T06 4Q drives)11111SK-20P-S813G PN-54825Inrush limiting Resistor, 10R 75W 1SK-20P-S814G PN-54826Inrush limiting Resistor, 15R 75W 1111SK-20P-S815G PN-54827Snubber Resistor, 18R 280W 66SK-20P-S816G PN-54828Snubber Resistor, 22R 180W 666SK-20P-S81N2RA PN-38183Ckt bd conn., kit Frame B 11111SK-20P-S81N3RA PN-38184Ckt bd conn., kit Frame C 11SK-20P-S81N6RA PN-80467Ckt bd conn., kit Frame D 11111SK-20P-S81N4RA PN-38186Ckt bd conn., kit I/O Board only 111111111111SK-20P-S81N5RA PN-38187Ckt bd conn., kit converter bd (8 chn)111111111111SK-20P-S81N7RA PN-80470Ckt bd conn., kit converter bd (12 chn)11111SK-20P-S822Q PN-54832Snubber Resistor, 47R 75W 66SK-20P-S829B PN-54835FUSE Ferrule 10x38mm, 15A 600V 33333SK-20P-S85B6PN-54836FUSE Ferrule 14x51mm, for FL-XX board, 25A 690V 33SK-20P-S85B9PN-54837Field fuse holder, 2-poles, 22x58mm fuses, frame D drives 11111SK-20P-S85C4PN-54842FUSE square body stud-mount, high speed, for armature leg, 630A 1250V 12SK-20P-S85C5PN-54844FUSE square body stud-mount, high speed, for armature leg, 700A 1250V 12SK-20P-S85C6PN-54845FUSE square body stud-mount, high speed, for armature leg, 800A 1250V 612SK-20P-S85C8PN-54847FUSE square body stud-mount, high speed, for armature leg, 1000A 1250V 6SK-20P-S85D2PN-54850FUSE square body flush end, high speed, for armature leg, 800A 1000V 66SK-20P-S8827PN-54855Snubber Resistor, 47R 50W 66666SK-20P-S8B29SK-20P-S8B29 A FUSE Ferrule 5x20mm slo-blow, switching supply, 2,5A 250V 222222211111SK-20P-S8HI6PN-54856Module SCR2 for Armature, 575VAC drive, 1K8V 250A 6SK-20P-S8N29PN-38191Field fuse holder, frame B & C drives 2222222SK-DC1-CVR1-A1PN-C10434PFDC Cover Assembly - HIM Cradle (common on all Frames)111111111111Remark: External high speed power fuses are listed on file "Fuses for PowerFlex DC.xls".Color Code:Not For Sale Obsolete Accessory NewDiscontinuedNo external fuses required. Armature leg fuses and fieldfuses inside drive.PowerFlex DC Drive SPARE PARTS LIST Rev V.1Models 20P41AF452RA0NNN ….20P41AF1K5RA0NNN (690VAC / 4Q)C CD D D D D D D D452 / 400565 / 500678 / 600791 / 700904 / 8001017 / 9001130 / 10001243 / 11001413 / 12501582 / 1400 20P-S520L20P-S520L A115VAC to 24VDC 8 channel I/O converter board111111111120P-S551LRA PN-81821115VAC to 24VDC 12 channel I/O converter board20P-S5V6220P-S5V62 A TBO-32 I/O Expansion board1111111111SK-20P-4S9S13PN-54734Snubber Capacitor, 1uF 850Vac66666SK-20P-4S9S14PN-54735Snubber Capacitor, 1,5uF 850Vac666SK-20P-4S9S19PN-54737FAN Motor-run Capacitor, 12uF 400Vac11111111SK-20P-F4M15PN-54739FUSE Ferrule 22x58mm, for field, 50A 600V2222SK-20P-F4M21PN-54742FUSE Ferrule 22x58mm, for field, 100A 600V2222SK-20P-S578N PN-54745FIR-D-69 Pulse Transformer Board, 575 & 690VAC regen drive11111111SK-20P-S5D37PN-54748FNLS Fan loss detector board11111111SK-20P-S5H08SK-20P-S5H08 A Main Control Bd (R-PFX) Interf. Ribbon Cable (20 conductor) to Cover Assembly1111111111SK-20P-S5N03SK-20P-S5N03 A SW1-31 Switching Power Supply Board11111111SK-20P-S5N20SK-20P-S5N20 A SN-FC Field Snubber Board11SK-20P-S5N22SK-20P-S5N22 A CN3 Power supply filter board11SK-20P-S5N423PN-54751FIR3-327 Pulse Transformer Board, 575 & 690VAC regen drive11SK-20P-S5N427PN-54755FL-69 Transient Noise Filter Board, 690VAC drive11SK-20P-S5N428PN-54756SN7-33 AC Line Snubber Capacitor Board, 0,33uF, 575 & 690VAC drive11SK-20P-S5N70PN-54758PFC40 Field board, 40Adc max1111SK-20P-S5N73PN-54761PFC70 Field board, 70Adc max1111SK-20P-S5N97SK-20P-S5N97 A SW3-32 Switching Power Supply Board11SK-20P-S5O51PN-54764CFSF571 Overvoltage clipping board1111111SK-20P-S5O52PN-54766CFSF572 Overvoltage clipping board1SK-20P-S5RP1SK-20P-S5RP1 A R-PFX32 Main Control - Regulation board1111111111SK-20P-S7257213PN-54768 4 SCR leg assembly, 2HS-PF-4Q-2K2V-678A3SK-20P-S7257214PN-54769 4 SCR leg assembly, 2HS-PF-4Q-2K2V-847A3SK-20P-S7257215PN-54770 4 SCR leg assembly, 2HS-PF-4Q-2K2V-904A3SK-20P-S7257216PN-54771 4 SCR leg assembly, 2HS-PF-4Q-2K2V-1017A3SK-20P-S7257217PN-54772 4 SCR leg assembly, 2HS-PF-4Q-2K2V-1243A33SK-20P-S7257219PN-54775 4 SCR leg assembly, 2HS-PF-4Q-2K2V-1413A3SK-20P-S7257220PN-54777 4 SCR leg assembly, 2HS-PF-4Q-2K2V-1582A3SK-20P-S725802PN-210106FAN Assembly, F280, 460Vac, used in frame D, series B drives11111111SK-20P-S725804PN-297701Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series C drives . 11111111SK-20P0S725805PN-297720Retrofit Kit for Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series B drives to convert to Series C.11111111SK-20P-S725806PN-297715Retrofit Kit for Fan Assembly,400-460Vac, 50/60Hz,for Frame D Series A drives to convert to Series C. 11111111SK-20P-S5D41PN-223015DC Fan Board, 400-460Vac, 50/60Hz, used in Frame D, series B and C drives11111111SK-20P-S725801PN-54797FAN Assembly, F280, 230Vac, 2400m3/h used in frame D, series A drives11111111SK-20P-S726171PN-54798Bus bar extension for U V W power terminals, 10x100mm (required for UL installations)1111SK-20P-S726172PN-54799Bus bar extension for U V W power terminals, 5x100mm (required for UL installations)1SK-20P-S764L PN-54802Bezel, Black, for PFDC Cover Assembly1111111111SK-20P-S779F PN-54806Module DIODE2 for Field, 1K6V 99A1111SK-20P-S785F PN-54808Module DIODE2 for Field, 1K6V 120A1111SK-20P-S799F SK-20P-S799F A Module DIODE2 for Field, 1K6V 40A11SK-20P-S7F73SK-20P-S7F73 A Module SCR2 for Arm & Field, 1K6V 25A11SK-20P-S7F75SK-20P-S7F75 A Module SCR2 for Arm & Field, 1K6V 55A1111SK-20P-S7F77SK-20P-S7F77 A Module SCR2 for Arm & Field, 1k6V 90A1111SK-20P-S7G17SK-20P-S7G17 A FAN F150x55 230VAC, 191 cfm33SK-20P-S7G30SK-20P-S7G30 A BIMETAL THERMOSTAT 90°C ±333SK-20P-S7G49PN-54812FUSE Ferrule 14x51mm, for Overvoltage Clipping Bd. (CFSFXXX), 10A 690V33333333SK-20P-S7G84PN-38189Fuse holder on Switching Power Supply Bd. (SW1, SW2, SW3 -board)2211111111SK-20P-S7GA9PN-54813BIMETAL THERMOSTAT 100°C ±311111111SK-20P-S7H22SK-20P-S7H22 A AC Current Transducer TAS2, 1600A / 0,4A2222222SK-20P-S7H23PN-54815AC Current Transducer TAS2, 2400A / 0,5A222SK-20P-S7K9K PN-54816EAM 1251_5 Ribbon cable, 34 conductor, 220mm (FIR-X to R-PFX)(Pulse Transformer Bd toMain Control Bd)11SK-20P-S7P7K PN-54822EAM 1408_5 Ribbon cable, 6 conductor, 350mm (PFC-X to R-PFX)(Field Board to MainControl Bd)11SK-20P-S7W0W PN-54823EAM 1251_4 Ribbon cable, 16 conductor, 100mm (SW-X to R-PFX)(Switching Power SupplyBd to Main Control Bd)11SK-20P-S713748PN-80430EAM 1374_38 Ribbon cable, 16 conductor, 450mm (SW-X to R-PFX)(Switching PowerSupply Bd to Main Control Bd)11111111Catalog Number SAP Part #DescriptionFrame SizesArmature current [A] / Power [HP] sizes。
A4980KLPTR-T;中文规格书,Datasheet资料
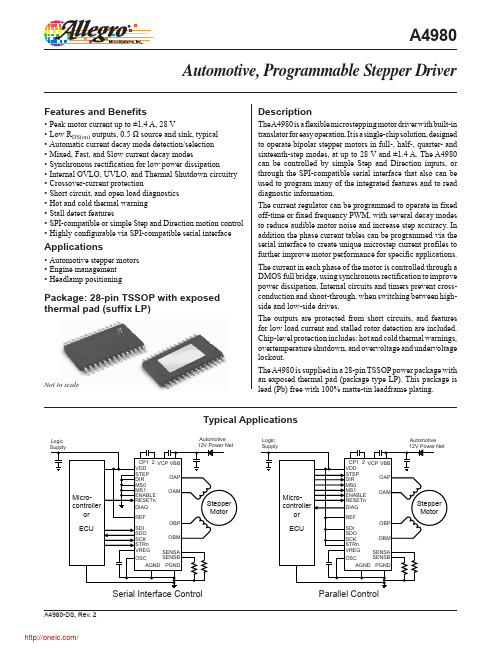
DescriptionThe A 4980 is a flexible microstepping motor driver with built-in translator for easy operation. It is a single-chip solution, designed to operate bipolar stepper motors in full-, half-, quarter- and sixteenth-step modes, at up to 28 V and ±1.4 A. The A4980 can be controlled by simple Step and Direction inputs, or through the SPI-compatible serial interface that also can be used to program many of the integrated features and to read diagnostic information.The current regulator can be programmed to operate in fixed off-time or fixed frequency PWM, with several decay modes to reduce audible motor noise and increase step accuracy. In addition the phase current tables can be programmed via the serial interface to create unique microstep current profiles to further improve motor performance for specific applications.The current in each phase of the motor is controlled through a DMOS full bridge, using synchronous rectification to improve power dissipation. Internal circuits and timers prevent cross-conduction and shoot-through, when switching between high-side and low-side drives.The outputs are protected from short circuits, and features for low load current and stalled rotor detection are included. Chip-level protection includes: hot and cold thermal warnings, overtemperature shutdown, and overvoltage and undervoltage lockout.The A4980 is supplied in a 28-pin TSSOP power package with an exposed thermal pad (package type LP). This package is lead (Pb) free with 100% matte-tin leadframe plating.Features and Benefits• Peak motor current up to ±1.4 A, 28 V• Low R DS(on) outputs, 0.5 Ω source and sink, typical • Automatic current decay mode detection/selection • Mixed, Fast, and Slow current decay modes• Synchronous rectification for low power dissipation• Internal OVLO, UVLO, and Thermal Shutdown circuitry • Crossover-current protection• Short circuit, and open load diagnostics • Hot and cold thermal warning • Stall detect features• SPI-compatible or simple Step and Direction motion control • Highly configurable via SPI-compatible serial interfaceApplications• Automotive stepper motors • Engine management • Headlamp positioningAutomotive, Programmable Stepper DriverPackage: 28-pin TSSOP with exposed thermal pad (suffix LP)Typical ApplicationsNot to scaleA4980AutomotiveLogicAutomotive LogicSelection GuidePart Number Packing*A4980KLP-T50 pieces per tube 4.4 mm × 9.7 mm, 1.2 mm nominal heightTSSOP with exposed thermal pad A4980KLPTR-T4000 pieces per reel*Contact Allegro® for additional packing optionsAbsolute Maximum Ratings With respect to GNDCharacteristic Symbol Notes Rating Unit Load Supply Voltage V BBx Applies to V BBA and V BBB–0.3 to 50V Logic Supply Voltage V DD–0.3 to 6V Pin CP1–0.3 to V BB V Pins CP2, VCP–0.3 to V BB+8V Pins STEP, DIR, ENABLE, DIAG–0.3 to 6V Pin VREG–0.3 to 8.5V Pin RESETn Can be pulled to V BB with 38 kΩ–0.3 to 6V Pin OSC–0.3 to 6V Pins MS0, MS1–0.3 to 6V Pins SDI, SDO, SCK, STRn–0.3 to 6V Pin REF–0.3 to 6V Pins OAP, OAM, OBP, OBM–0.3 to V BB V Pins SENSA, SENSB–0.3 to 1V Ambient Operating TemperatureRangeT A Range K; limited by power dissipation –40 to 150°C Maximum Continuous JunctionTemperatureT J(max) 150°CTransient Junction Temperature T tJ Overtemperature event not exceeding 10 s,lifetime duration not exceeding 10 hours,guaranteed by design and characterization175°CStorage Temperature Range T stg–55 to 150°CThermal Characteristics may require derating at maximum conditionsCharacteristic Symbol Test Conditions*Value UnitPackage Thermal Resistance (Junction to Ambient)RθJA4-layer PCB based on JEDEC standard28ºC/W2-layer PCB with 24.52 cm2 of copper area each side32ºC/WPackage Thermal Resistance(Junction to Pad)RθJP2ºC/W *Additional thermal information available on the Allegro websiteFunctional Block DiagramELECTRICAL CHARACTERISTICS1,2 Valid at T J = –40°C to 150°C, V BB = 6 to 28 V, V DD = 3.3 V; unless otherwise noted Characteristics Symbol Test Conditions Min.Typ.Max.Unit SuppliesLoad Supply Voltage Range3V BB Functional0–50V Outputs Driving 3.3–V BBOV VLoad Supply Quiescent Current I BBQ ENABLE = 0––4mA Sleep mode–110μALogic Supply Voltage Range V DD3– 5.5VLogic Supply Quiescent Current I DDQ ENABLE = 0––5mA Sleep mode–415μACharge Pump Voltage V CP With repect to VBB, V BB >7.5 V, ENABLE = 0,RESETn = 1– 6.7–VInternal Regulator Voltage V REG ENABLE = 0, RESETn = 1, V BB > 7.5 V–7.2–V Internal Regulator Dropout Voltage V REGDO ENABLE = 0, RESETn = 1, V BB > 3.5 V–100200mV Motor Bridge OutputHigh-Side On-Resistance R ONH V BB = 13.5 V, I OUT = –1 A, T J = 25°C–500600mΩV BB = 13.5 V, I OUT = –1 A, T J = 150°C–9001100mΩV BB = 7 V, I OUT = –1 A, T J = 25°C–625750mΩHigh-Side Body Diode ForwardVoltageV FH I F = 1 A–– 1.4VLow-Side On-Resistance R ONL V BB = 13.5 V, I OUT = 1 A, T J = 25°C–500600mΩV BB = 13.5 V, I OUT = 1 A, T J = 150°C–9001100mΩV BB = 7 V, I OUT = 1 A, T J = 25°C–625750mΩLow-Side Body Diode ForwardVoltageV FL I F = –1 A–– 1.4VOutput Leakage Current I LO ENABLE = 0, RESETn = 1, V O = V BB–120–65–μA ENABLE = 0, RESETn = 1, V O = 0 V–200–120–μA ENABLE = 0, RESETn = 0, V O = V BB–<1.020μA ENABLE = 0, RESETn = 0, V O = 0 V–20<1.0–μACurrent ControlInternal Oscillator Frequency f OSC OSC = AGND 3.24 4.8MHz 51 kΩ from OSC to VDD 3.6– 4.4MHzExternal Oscillator Frequency Range f EXT3–5MHz Blank Time4t BLANK Default Blank-Time–1500–ns Off-Time (In Fixed Off-Time Mode)4t OFF Default Off-Time–44–μs PWM Frequency (In Fixed FrequencyMode)4f PWM Default PWM Frequency–16.7–kHz Fast Decay Time4t FAST Default Fast Decay Time–8–μs Reference Input Voltage V REF0.8–2V Internal Reference Voltage V REFint REF tied to VDD 1.1 1.2 1.3VContinued on the next page…ELECTRICAL CHARACTERISTICS1,2 (continued) Valid at T J = –40°C to 150°C, V BB= 6 to 28 V, V DD = 3.3 V; unless otherwise noted Characteristics Symbol Test Conditions Min.Typ.Max.UnitCurrent Control (continued)Reference Input Current I REF–303μAMaximum Sense Voltage V SMAX–125–mVCurrent Trip Point Error5E ITrip V REF = 2 V, MxI0 = MxI1 = 1––±5%Logic Input And Output – DC ParametersInput Low Voltage V IL––0.3×V DD VInput High Voltage V IH0.7×V DD––VInput Hysteresis V Ihys250500–mVInput Current (Except RESETn)I IN0 V < V IN < V DD–1–1μAInput Pull-Down Resistor (RESETn)R PD–50–kΩOutput Low Voltage V OL I OL = 2 mA–0.20.4VOutput High Voltage V OH I OL = –2 mA V DD–0.4V DD–0.2–VOutput Leakage (SDO)I O0 V < V O < V DD, STRn = 1–1–1μALogic Input And Output – Dynamic ParametersReset Pulse Width t RST0.2– 4.5μsReset Shutdown Width t RSD10––μsInput Pulse Filter Time (STEP, DIR)t PIN–35–nsClock High Time t SCKH A in figure 150––nsClock Low Time t SCKL B in figure 150––nsStrobe Lead Time t STLD C in figure 130––nsStrobe Lag Time t STLG D in figure 130––nsStrobe High Time t STRH E in figure 1300––nsData Out Enable Time t SDOE F in figure 1––40nsData Out Disable Time t SDOD G in figure 1––30nsData Out Valid Time from Clock Falling t SDOV H in figure 1––40nsData Out Hold Time from Clock Falling t SDOH I in figure 15––nsData In Set-Up Time to Clock Rising t SDIS J in figure 115––nsData In Hold Time From Clock Rising t SDIH K in figure 110––nsSTEP Rising to STRn Risingt SPS L in figure 1, only when D15 = 1 and D14 = 0100––ns Setup TimeSTEP Rising from STRn Risingt SPH M in figure 1, only when D15 = 1 and D14 = 0300––ns Hold TimeStep High Time t STPL1––μsStep Low Time t STPH1––μsSetup Time Control Input Changet SU MS1, MS2, DIR200––ns to STEPHold Time Control Input Changet H MS1, MS2, DIR200––ns from STEPWake-Up from RESET t EN––1ms Continued on the next page…ELECTRICAL CHARACTERISTICS1,2 (continued) Valid at T J = –40°C to 150°C, V BB= 6 to 28 V, V DD = 3.3 V; unless otherwise noted Characteristics Symbol Test Conditions Min.Typ.Max.Unit Diagnostics and ProtectionVBB Overvoltage Threshold V BBOV V BB rising323436V VBB Overvoltage Hysteresis V BBOVHys2–4V VBB Undervoltage Threshold V BBUV V BB falling 5.2 5.5 5.8V VBB Undervoltage Hysteresis V BBHys500760–mV VREG Undervoltage Threshold – High V REGUVH V REG falling 4.6 4.8 4.95V VREG Undervoltage Hysteresis – High V RGUVHHys250370–mV VREG Undervoltage Threshold – Low V REGUVL V REG falling 2.853 3.15V VREG Undervoltage Hysteresis – Low V RGUVLHys100230–mV VDD Undervoltage Threshold V DDUV V DD falling 2.6– 2.9V VDD Undervoltage Hysteresis V DDUVHys50100–mV OSC Timeout t WD Bit 13 = 10.51 1.5μs High-Side Overcurrent Threshold I OCH Sampled after t SCT 1.4 2.05 2.65A High-Side Current Limit I LIMH Active during t SCT3 5.58A Low-Side Overcurrent Sense Voltage V OCL Sampled after t SCT210250290mV Overcurrent Fault Delay t SCT Default Fault Delay150020002700ns Open Load Current Threshold Error E IOC V REF = 2 V, Mx0 = Mx1 = 1––±10% Temperature Voltage Output Offset V TO Temperature output selected on DIAG pin–1440–mV Temperature Voltage Output Slope A T––3.92–mV/°C Cold Temperature Warning Threshold T JWC Temperature decreasing–20–100ºC Cold Temperature Warning Hysteresis T JWChys–15–ºC Hot Temperature Warning Threshold T JWH Temperature increasing125135145ºC Hot Temperature Warning Hysteresis T JWHhys–15–ºC Overtemperature Shutdown Threshold T JF Temperature increasing155170–ºC Overtemperature Hysteresis T Jhys Recovery = T JF – T Jhys–15–ºC 1For input and output current specifications, negative current is defined as coming out of (sourcing) the specified device pin.2All references to “VBB” apply to VBBA and VBBB.3Function is correct but parameters are not guaranteed above or below the general limits (6 to 28 V). Outputs not operational above V BBOV orbelow V REGUVL.4Assumes 4 MHz clock.5Current Trip Point Error is the difference between actual current trip point and the target current trip point, referred to maximum full scale (100%) current: E itrip = 100 × [I trip(actual) – I trip(target)] / I fullscale (%).Figure 1. Serial Interface Timing DiagramFigure 2. Control Input Interface Timing DiagramSTRnSCKSDISDOSTEPKey CharacteristicKey CharacteristicA Clock High Time H Data Out Valid Time from Clock FallingB Clock Low Time I Data Out Hold Time from Clock FallingC Strobe Lead Time J Data In Set-Up Time to Clock RisingD Strobe Lag Time K Data In Hold Time From Clock RisingE Strobe High Time L STEP Rising to STRn Rising Setup TimeF Data Out Enable Time M STEP Rising from STRn Rising Hold Time GData Out Disable TimeX “Don’t care”ZHigh-impedance (tristate)STEPDIR, MS0, MS1RESETnENABLE*ENABLE(Pin) OR RUN[EN] bitFunctional DescriptionThe A4980 is an automotive stepper motor driver suitable for high temperature applications such as headlamp bending and leveling, throttle control, and gas recirculation control. It is also suitable for other low current stepper applications such as air con-ditioning and venting. It provides a highly flexible microstepping motor driver that can be configured via the SPI-compatible serial interface. It can be controlled with simple Step and Direction inputs, for high speed stepping applications, or directly through the serial interface by writing a step change value.The two DMOS full bridges are capable of driving bipolar step-per motors in full-, half-, quarter-, eighth- and sixteenth-step modes, at up to 28 V and ±1.4 A. The current in each phase of the stepper motor is regulated by a peak detect PWM current control scheme that can be programmed to operate in fixed off-time or fixed frequency. Several decay modes can be selected to reduce audible motor noise and increase step accuracy. In addition the phase current tables, which default to a sinusoidal current profile, can be programmed via the serial interface to create unique microstep current profiles to further improve motor performance for specific applications.The outputs are protected from short circuits, and features for open load and stalled rotor detection are included. Chip level pro-tection includes hot and cold thermal warning, overtemperature shutdown, and overvoltage and undervoltage lockout.Pin FunctionsVBBA, VBBB Main motor supply and chip supply for internal regulators and charge pump. VBBA and VBBB should be con-nected together and each decoupled to ground with a low ESR electrolytic capacitor and a good ceramic capacitor.Note: Any reference to “VBB” in this specification is defined as applying to both VBBA and VBBB.CP1, CP2 Pump capacitor connection for charge pump. Connect a 100 nF (50 V) ceramic capacitor between CP1 and CP2.VCP Above-supply voltage for high-side drive. A 100 nF (16 V) ceramic capacitor should be connected between VCP and VBB to provide the pump storage reservoir.VDD Logic supply. Compatible with 3.3 V and 5 V logic. Should be decoupled to ground with a 100 nF (10 V) ceramic capacitor. VREG Regulated supply for bridge gate drive. Should be decou-pled to ground with a 470 nF (10 V) ceramic capacitor.AGND Analog reference ground. Quiet return for measurement and input references. Connect to PGND (see Layout section).PGND Digital and power ground. Connect to supply ground and AGND (see Layout section).OAP, OAM Motor connection for phase A. Positive motor phase current direction is defined as flowing from OAM to OAP. OBP, OBM Motor connection for phase B. Positive motor phase current direction is defined as flowing from OBM to OBP.SENSA Phase A current sense. Connect sense resistor between SENSA and PGND.SENSB Phase B current sense. Connect sense resistor between SENSB and PGND.REF Reference input to set absolute maximum current level for both phases. Defaults to internal reference when tied to VDD. STEP Step logic input. Motor advances on rising edge. Filtered input with hysteresis.DIR Direction logic input. Direction changes on the next STEP rising edge. When high, the Phase Angle Number is increased on the rising edge of STEP. Has no effect when using the serial interface. Filtered input with hysteresis.MS0 Microstep resolution select input.MS1 Microstep resolution select input.RESETn Resets faults when pulsed low. Forces low-power shut-down (sleep) when held low for more than the Reset Shutdown Width, t RSD. Can be pulled to VBB with 30 kΩ resistor. ENABLE Controls activity of bridge outputs. When held low, deactivates the outputs, that is, turns off all output bridge FETs. Internal logic continues to follow input commands.SDI Serial data input. 16-bit serial word input MSB first.SDO Serial data output. High impedance when STRn is high. Out-puts bit 15 of the diagnostic registers (Fault Register 0 and Fault Register 1), the Fault Register flag, as soon as STRn goes low. SCK Serial interface clock. Data is latched in from SDI on the rising edge of the SCK clock signal. There must be 16 rising edges per write and SCK must be held high when STRn changes. STRn Serial data strobe and serial access enable. When STRn is high any activity on SCK or SDI is ignored, and SDO is highimpedance allowing multiple SDI slaves to have common SDI, SCK, and SDO connections.DIAG Diagnostic output. Function selected via the serial inter-face, setting Configuration Register 1. Default is Fault output. OSC With bit 13 in Configuration Register 1 set to 0, either con-nect this pin to AGND to use the internal oscillator running at the default frequency of 4 MHz, or connect a resistor to VDD to set the internal oscillator frequency. (The approximate frequency is calculated from:f OSC = 10 000 / (48 R OSC – 20)where f OSC is the internal oscillator frequency in MHz, and R OSC is the value, in kΩ of the resistor between OSC and VDD.)If bit 13 in Configuration Register 1 is set to 1, then OSC is the input for an external system clock, which must have a frequency between 3 and 5 MHz. In this mode a watchdog is provided to detect loss of the system clock. If the OSC pin remains high or low for more than the watchdog time, t WD , 1 μs typical, then the Fault Register flag (bit 15 in the diagnostic registers) is set and the outputs are disabled until the clock restarts.Driving a Stepper MotorA two-phase stepper motor is made to rotate by sequencingthe relative currents in each phase. In its simplest form, each phase is simply fully energized in turn by applying a voltage to the winding. For more precise control of the motor torque over temperature and voltage ranges, current control is required. For efficiency this is usually accomplished using pulse width modula-tion (PWM) techniques. In addition current control also allows the relative current in each phase to be controlled, providing more precise control over the motor movement and hence improve-ments in torque ripple and mechanical noise. Further details of stepper motor control are provided in Appendix 1.For bipolar stepper motors the current direction is significant,so the voltage applied to each phase must be reversible. This requires the use of a full bridge (also known as an H-bridge) which can switch each phase connection to supply or to ground. Phase Current ControlIn the A4980, current to each phase of the two-phase bipolar stepper motor is controlled through a low impedance N-channel DMOS full bridge. This allows efficient and precise control of the phase current using PWM switching. The full-bridge con-figuration provides full control over the current direction during the PWM on-time, and over the current decay mode during the PWM off-time. Due to the flexibility of the A4980 these control techniques can be completely transparent to the user or can be partially- or fully-programmed through the serial interface.Each leg (high-side, low-side pair) of a bridge is protected from shoot-through by a fixed dead time. This is the time between switching off one FET and switching on the complementary FET. Cross-conduction is prevented by lock-out logic in each driver pair. The phase currents and in particular the relative phase currents are defined in the Phase Current table (table 7). This table defines the two phase currents at each microstep position. For each of the two phases, the currents are measured using a sense resistor, R S, with voltage feedback to the respective SENSx pin. The target current level is defined by the voltage from the digital-to-analog converter (DAC) for that phase. The sense voltage is amplified by a fixed gain and compared to the output of the DAC.There are two types of maximum current: the absolute maximum, I SMAX , the maximum possible current defined by the sense resis-tor and the reference input; and the phase maximum, I PMAX , the maximum current delivered to a motor phase.The absolute maximum current, I SMAX, is defined as:I SMAX = V REF / (16 × R S )where V REF is the voltage at the REF pin, and R S is the sense resistor value.The phase maximum, I PMAX, is the 100% reference level for the phase current table and may be a fraction of the absolute maxi-mum current, I SMAX, depending on the value of the MXI0 and MXI1 bits in Configuration Register 0.For example:• if R S = 180 mΩ and V REF = 2 V, then I SMAX = 694 mA• if MXI1= 1 and MXI0 = 0, then I PMAX = 520 mAThe actual current delivered to each phase at each Step Angle Number is determined by the value of I PMAX and the contentsof the Phase Current table. For each phase, the value in the table is passed to the DAC, which uses I PMAX as the reference 100% level (code 63) and reduces the current target depending on the DAC code. The output from the DAC is used as the input to the current comparators.The current comparison is ignored at the start of the PWMon-time for a duration referred to as the blank time. The blank time is necessary to prevent any capacitive switching currents from causing a peak current detection.The PWM on-time starts at the beginning of each PWM period. The current rises in the phase winding until the sense voltage reaches the required current level. At this point the PWM off-timestarts and the bridge is switched into one of two decay modes, slow decay or fast decay:• Slow decay is most effective when the current is rising from step to step. and it occurs when the phase winding is effectively shorted by switching-on either both high-side FETs or both low-side FETs in the full bridge.• Fast decay is most effective when the current is falling from step to step, and it occurs when the voltage on the phase is reversed.One disadvantage of fast decay is the increased current ripple in the phase winding. However, this can be reduced while main-taining good current control, by using a short time of fast decay followed by slow decay for the remainder of the PWM off-time. This technique is commonly referred to as mixed decay.The A4980 provides two methods to determine the PWM frequency: fixed off-time and fixed frequency. At power-up the default mode is fixed off-time. Fixed frequency can be selected through the serial interface. Fixed off-time provides a marginal improvement in current accuracy over a wide range of current levels. Fixed frequency provides a fixed fundamental frequency to allow more precise supply filtering for EMC reduction. In both cases the PWM off-time will not be present if the peak current limit is not attained during the PWM on-time.Phase Current TableThe relative phase currents are defined by the Phase Current table. This table contains 64 lines and is addressed by the Step Angle Number, where Step Angle Number 0 corresponds to 0° or 360°. The Step Angle Number is generated internally by the step sequencer, which is controlled either by the STEP and DIR inputs or by the step change value from the serial input. The Step Angle Number determines the motor position within the 360° electri-cal cycle and a sequence of Step Angle Numbers determines the motor movement. Note that there are four full mechanical steps per 360° electrical cycle.Each line of the Phase Current table (table 7) has a 6-bit value per phase to set the DAC level for that phase, plus an additional bit per phase to determine the current direction for that phase. The Step Angle Number sets the electrical angle of the stepper motor in one-sixteenth microsteps, approximately equivalent to electri-cal steps of 5.625°.On first power-up or after a VDD power-on reset, the Phase Cur-rent table values are reset to define a sinusoidal current profile and the Step Angle Number is set to 8, equivalent to the electri-cal cycle 45° position. This position is defined as the “home” position. The maximum current in each phase, I PMAX, is defined by the sense resistor and the Maximum Current setting (bitsMXI[0..1]) in Configuration Register 0. The phase currents for each entry in the Phase Current table are expressed as a percent-age of this maximum phase current.When using the STEP and DIR inputs to control the stepper motor, the A4980 automatically increases or decreases the Step Angle Number according to the step sequence associated with the selected step mode. The default step mode, reset at power-up or after a power on reset, is full step. Half-, quarter-, and sixteenth-step sequences are also available when using the STEP and DIR inputs, and are selected using the logical OR of the MS0 and MS1 inputs and the MS0 and MS1 bits in Configuration Reg-ister 0. The eighth-step sequence is shown in the Phase Current table for reference only.When using the serial interface to control the stepper motor, a step change value (6-bit) is input through the serial interfaceto increase or decrease the step angle. The step change valueis a two’s complement (2’sC) number, where a positive value increases the step angle and a negative value decreases the Step Angle Number. A single step change in the Step Angle Number is equivalent to a single one-sixteenth microstep. Therefore, for cor-rect motor movement, the step change value should be restricted to no greater than 16 steps, positive or negative.This facility enables full control of the stepper motor at any microstep resolution up to and including sixteenth-step, plusthe ability to change microstep resolution “on-the-fly” from one microstep to the next.In both control input method cases, the resulting Step Angle Number is used to determine the phase current value and current direction for each phase, based on the Phase Current table. The decay mode is determined by the position in the Phase Current table and the intended direction of rotation of the motor. DiagnosticsThe A4980 integrates a number of diagnostic features to protect the driver and load as far as possible from fault conditions and extreme operating environments. At the system level the sup-ply voltages and chip temperature are monitored. A number of these features automatically disable the current drive to protect the outputs and the load. Others only provide an indication of the likely fault status, as shown in the Fault table (table 1). A single diagnostic output pin (DIAG) can be programmed through the serial interface to provide several different internal signals. At power-up, or after a power-on-reset the DIAG pin outputs a simple Fault Output flag which will be low if a fault is present. The Fault Output flag remains low while the fault is present or if分销商库存信息: ALLEGROA4980KLPTR-T。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A4980:汽车可编程步进驱动器
A4980 是一款灵活的微步电动机驱动器,带有内置转换器,易于操作。
它采用单芯片解决方案,能够以全步进、半步进、四分之一及十六分之一步进模式驱动双极步进电动机,工作电压和电流可达28 V 和±750 mA。
A4980
可使用简单的步进和方向输入或通过SPI 兼容型接口控制,而且还能用于设置多种整合功能及读取诊断信息。
电流调整器通过编程,能以固定停机时间或固定频率PWM 工作,并可通过多种衰减模式降低电动机的可闻噪音和提高步进准确性。
而且,相电流表可以通过串行接口编程,为特定应用建立适用的微步进电流分布,进一步提高电动机的性能。
电动机的所有相电流均通过DMOS 全桥式装置控制,使用同步整流,减少功率耗散。
在高侧驱动和低侧驱动之间切换时,内部电路和计时器可防止跨导和击穿,
从而避免输出短路。
此外,它还具有低负载电流和失速转子检测功能。
芯片级保护包括:高温和低温警告、过温关机、过压和欠压锁定。
A4980 采用28 引脚TSSOP 功率封装,并安装有裸露热焊盘(封装类
型为LP)。
无铅封装,采用100% 雾锡电镀引脚框。
功能方框图
特点
●典型应用±750 mA、28 V
●低RDS(开)输出,一般为0.5 Ω源极和灌电流
●自动电流衰减模式检测/选择。