robcad 学习过程笔记2011.11.26
【ROBCAD学习】robcad_最基本的操作过程
最基本的操作过程Robcad通常要创建两个文件夹,一个为Library;一个为Project。
Library一般存放固定的、不可更改的文件,比如:机器人,车型,测点,围栏,工装,水泥台等等。
Project一般存放的都是Library里的,在Robcad里可以被更改的文件。
Project里的文件可以更改过后,再放回Library文件里当库文件。
注:两个文件夹(包括两个文件夹)下的所有文件名必须是英文,中文不识别。
还有就是创建一个项目的时候最好是在Simulation文件夹下如:Simulation\jin\project或Simulation\jin\library。
以下是本行业使用Robcad的过程:1:打开软件在Robcad界面下,点击Setup,弹出Setup窗口→点击Project→Define→在Project name:填写项目名称→在Path:项目所在的Project的路径→点击Accept确认。
(这一步叫做“定义路径”)→点击Set library root(创建库的根目录)→删掉Filter,selection两栏中的内容,在Directories栏中找到项目的1Library路径,点击Filter键并确认。
创建好之后,点击Configuration→Store→User Project (保存)。
2:在Robcad界面下,点击Project→找到项目名称并点击进入。
弹出Layout窗口,点击Store as(另存) →在弹出窗口里填写另存名(这个时候Project文件下会出现-另存名的文件夹)。
在Layout窗口下点击Get component(获得组件),然后在Get component找出需要使用的诸如车型,机器人等等的组件。
将不需要的项目去掉,在Robcad界面下点击Setup→弹出Setup窗口→点击Projects→再点击Cancel选择要去掉的项目。
Sensor的安装方法(机器人关联Sensor)1.将传感器安装到机器人上在robcad界面下,点击上方工具栏中按钮Robcad,出现下拉菜单选择Workcell,在右下方出现工具框,选择Motion按钮,出2现Motion对话框,选择setting。
ROBCAD_初级培训
软件状态拦
Robcad training course Create by Si Mao
键盘功能键命令介绍
软件工作状态,
F1键,为软件帮助快捷键 F2键,无命令; F3键,视图窗口居中显示
在3D视图窗口中,按F4键,弹出如下 窗口,可输出不同形式的可视化文件:
在3D视图窗口中,按F5键,弹出如下 窗口,各命令会以不同形式,显示视 图零件;和更改不同视图窗口:
Robcad能够在由产品和多类制造资源所构成的环境中,进行机器人工作单元验证和自动化制造过程的 设计、仿真、优化、分析和离线编程。它提供的并行的工程平台,能用于优化焊接工艺过程并计算焊 装节拍时间。利用Robcad,你能够在三维图形计算机工作站上设计和模拟完整的焊装单元和系统。通 过允许制造工程师在前期虚拟地验证自动化制造方法和手段,Robcad使制造商能够无瑕疵地引进自动 化过程。作为一个标准的大规模的解决软件,ROBCAD能够充分集成主要的工艺,通过一套强大的过 程特定应用,覆盖范围广,包括点焊、弧焊、激光焊和冲铆等。 ROBCAD软件的开发有着突出的优点:提高加工质量、精确度和效益;减少劳动力时间和过程工程主 导时间;极大提高程序的准确度和过程质量;优化开发和主要的投资;减少成本;加速了投入市场的 时间。
Robcad training course Create by Si Mao
ROBCAD软件介绍
工作单元布局设计和建模 除带有最全面的机器人库之外,Robcad 还能非常方便地对额外的机器人和设备进行建模。 利用Robcad 布局设计功能,能够构建三维的制造环境。一旦用Robcad 完成制造流程的 设计,就可以通过Robcad 的机器人功能,能够对机器手的运动范围和限制条件进行检查。 机器人仿真 Robcad 能基于控制器特征生成可配置机器人运动路径规划,并以此为基础,能够计算生 产节拍,分析实时性能并缩短调试周期。 真实机器人仿真(RRS) - 基于实际控制器特征的机器人运动路径规划软件提供了对 节拍时间非常精确的计算。 冲突检测 在机器人仿真和运动过程之中,Robcad 能够动态地检测冲突,以防止对设备产生高成本 的损害。 操作顺序(SOP) 利用 Robcad,能够对所有的操作和生产环节及其利用的资源(比如,机器人、机械、人 力)进行详细的描述、排序。通过该功能,能够对整个工作单元的制造过程在可视化的 环境下进行优化。 离线编程(OLP) 利用 Robcad OLP,能够准确地模拟机器人运动径和次序,并直接为车间提供机器人操作程序。Robcad 适用于大 部分机器人型号(50多个接口,超过200 多个控制器配置),它能把控制器信息-包括运动和过程属性-添加到生 成的机器人路径之中。然后,Robcad OLP生成控制器程序,随后该把程序下载到实际控制设备加以应用。 Robcad 还可以从实际设备上传程序,以供重用和进一步优化。
Autocad学习详细笔记学习记录、CAD
Autocad 作业――代笔录参照红色部分“例一”用自己的“白话文”语言写出每节课所学以下命令的作用和详尽步骤,把作业写在笔录本上以备老师检查,该作业可用来取代自己的学习笔录:Autocad 平面部分第一节:例一:1、【直线】命令的作用及划直线有几种方法:答:【直线】命令用来划线段,方法是先给出第一点,再给出下一点,而后会从第一点到第二点连出一条直线。
能够重复的给出下一点这样能够划无数条首尾相接的线段,想结束时打回车键结束。
方法:①绝对坐标法(200, 100 回车)②相对坐标法(@200 , 0 回车)③直接长度法(200 回车)④极坐标法(@200<45 回车)2、【删除】命令的作用和选择对象的 3 中方法:点选法,框选法,交错法。
第二节:图中项的种类颜色粗细用“特征”工具栏设定1、【修剪】作用及详尽步骤:1。
一次修剪:点”修剪”图标 ,选择剪切处(即剪刀要走过的路线),而后回车,再选择被剪除部分。
2。
多把剪刀时挨次选择剪切处:最外侧结点以外和两剪切处之间可被剪除。
交错法选择时两结点之间可被剪除。
2、【延长】作用及详步骤:点击“延长” 图标后选择’“ 墙”(要延长终点所在的线)回车再在要被延长的线上离墙近的点。
线延长后与“墙”线段午交点的不可以延长3、【复制】作用及详尽步骤“ 复制”---选择对象而后回车再随意点击一点再点击另一点则能使对象沿这两点所在线的方向复制到离对象这两点线段距离远处。
4、【镜像】作用及详尽步骤:类上,注意正交、能否删除原图像:镜像与复制的差别直接回车不删除原对象, Y 回车删除。
5、【挪动】作用及详尽步骤,类上。
6、【圆】的作用,说出告诉计算机长度的 3 中方法,详述画圆的 4 中方法。
相切是选的相切线不是相切点,输入T 回车——选择相切线或圆而后输入半径;直接法:(直接确立圆心后)直接输入圆半径(或输入 D 回车在输入的数值为圆的直径);一点法:(先直接确立圆心后)任点一点(即确立了圆的半径);两点法:(输入2P 回车)直接两点间线短距离为半径;三点法:(输入 3P 回车)琢个点击三点7、直接选择线可控制线拉伸和压缩第三节:1、【结构线(无穷长直线)】的作用及 6 中划线的方法:指定点:直接指定两点;水平(H):输入 H 回车再确立一点,只好画出经过这一点的水平结构线;垂直( V):输入 V 回车在确立一点,只好画出竖直结构线;角度( A):输入 A 回车而后就有两种做法①输入 O 回车——再输入某一角度回车——最后确立线要经过的点,则画出的线有必定角度②输入(参照) R 回车(或直接回车)——选择一线在输入角度回车则所画的线输入的角度是相对所选的线为基准的;二均分( B):输入 B 回车——选择某一角的极点——选角的起点——选角的终点,则所画的线为该角的角均分线;偏移( O)(相当于复制):输入O 回车①指定偏移距离(可用两点法)——选择偏移对象——确立偏移的对方向(可连续操作)②输入(经过) T(或直接回车)回车——选择要偏移的对象——选摘要经过的点。
robcad学习手册、资料、讲解
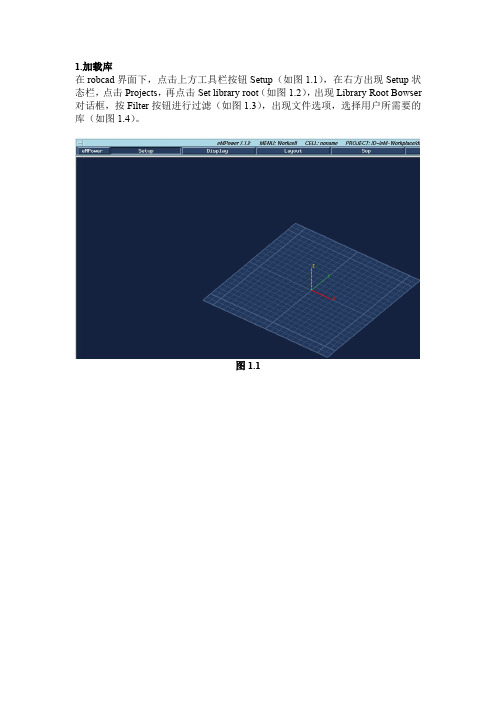
1.加载库在robcad界面下,点击上方工具栏按钮Setup(如图1.1),在右方出现Setup状态栏,点击Projects,再点击Set library root(如图1.2),出现Library Root Bowser 对话框,按Filter按钮进行过滤(如图1.3),出现文件选项,选择用户所需要的库(如图1.4)。
图1.1图1.2图1.3图1.42.加载车模在robcad界面下,点击上方工具栏按钮eMpower,出现下拉菜单选择Workcell (如图2.1)或者点击工具栏中按钮Layout(如图2.2),在右方出现Layout状态栏,点击Load cell(如图2.3),出现Load Cell对话框,选择用户所需要的车模(如图2.4)。
注:有时Cells框中无选项出现,按Thumbnails。
,出现选择对话框,选择用户所需要的车模(如图2.5)。
图2.1图2.2图2.3.图2.4图2.53.在画面中加入机器人在robcad界面下,点击上方工具栏按钮Layout(如图3.1),在右方出现Layou 状态栏,点击Get component(如图3.2),出现Get Component对话框,选择Libraries,选择用户所需要的机器人,Locate At:选择机器人位置,Instance Name:输入机器人名字(如图3.3)。
点击Locate At后的Position,出现Position对话框,点击Values,输入机器人所在位置的数据(如图3.4)。
图3.1图3.2图3.3图3.44.画面操作在robcad界面下,滚动鼠标中键滚轴拉远近视距,按住鼠标右键拖动进行画面的平移,同时按住鼠标中键+右键拖动进行画面的翻转。
5.控制机器人的运动在robcad界面下,点击上方工具栏中按钮eMpower,出现下拉菜单选择Workcell (如图5.1),在右下方出现工具框,选择Motion按钮(如图5.2),出现Motion 对话框(如图5.3),可按不同的坐标对机器人进行运动控制,点击Active mech,出现Mechanisms对话框(如图5.4),可选择机器人,点击编号或直接从界面中选择机器人。
CAD学习资料(基础)
【分享】10版JCCAD学习笔记该帖被浏览了10206次 | 回复了82次最近正打算学习10版PKPM的基础设计部分,在论坛上找了很久,发现关于JCCAD 的具体参数设置的资料很匮乏。
对于新手来讲,SATWE的参数讲义已经很全面,坛子上很容易便能找到,但真正复杂的JCCAD却很难系统的学习。
因此便想开个帖子记录下自己的学习心得,一来总结自身知识,二来更是抛砖引玉——既然没有前辈总结,那我便自己总结出来再请前辈指导如何?关于本文的内容,首先要交代几点:一是我本身也是菜鸟一只,之前并没有系统研究过JCCAD,因此想在这里寻找权威的同学们要失望了,本文所能提供的仅仅只供参考,更多的需要大家的指点和勘误;二是由于工作较忙,不能像直播帖一样持续不断的进行下去,因此如果时间跨度比较长请大家不要责怪。
若有爱心的同学,可以在跟帖中将自己的心得帖出来供大家学习。
若单纯只是学习的同学,也请不要做无意义的顶贴,赚土木币的方式很多,单纯水帖的行为会影响大家的阅读,在此先行谢过。
不多废话,进入正题。
菜单一:【地质资料输入】首先要明确工程的基础形式,需不需要进行地质资料的输入。
JCCAD用户手册将基础区分为两类,一类为无桩基础(包括天然地基或复合地基)。
当不需要计算沉降变形时,可不输入地质资料;若需要进行沉降计算则必须输入,但只需输入土参数中的压缩模量、重度、土层厚度三项;另一类为有桩基础(包括桩承台或桩伐基础)。
在进行单桩刚度和沉降计算时需要输入地质资料。
此处土参数(除粘聚力)均需要详细输入。
——刘民易《JCCAD基础设计禁忌》PS:关于不需要进行地基变形计算的建筑物范围,见《建筑地基基础设计规范》3.0.2条。
土参数及标准孔点的土层参数均参照各工程勘探报告。
在此应注意的是绝对标高与结构标高的换算关系。
“如填0,要求地质资料标高系统与基础输入的结构标高系统要一致;如不是0,则地质资料与基础输入的结构标高系统可不一致。
”——朱春明《JCCAD软件及基础设计》Ps:关于JCCAD内所有参数的标高输入,分两种情况。
AUTOCAD学习笔记
AUTOCAD学习笔记AUTOCAD2007一、命令有关的1、打开/关闭正交命令,F8;2、结束命令:回车/鼠标右键/ESC;3、填充命令:fill;4、距离命令:di;5、全局线型比例缩放:lts。
6、写块:W。
7、矩形阵列插入块:minsert(不能用分解命令分解);8、命令行放大显示TEXTSCR;二、绘制基本二维图元1、点的定距等分依据选取直线的位置靠左/右,则按从左至右/从右至左进行定距等分;2、圆环圆环的外径可以小于内径,内径可以为零。
3、构造线构造线可以进行角度的二等分;4、矩形绘制矩形时,使用尺寸绘制输入长、宽后需制定具体位置确定(共计4个);绘制矩形的宽度选项为线宽;5、圆弧圆弧的绘制为逆时针绘制;6、圆圆的绘制使用相切、相切、相切命令绘制时,已相切圆为参照物时,依据所选取圆的位置确定是内切还是外接;使用相切、相切、半径命令绘制时,若是直线可以在虚交位置成圆。
7、椭圆弧起始角度选取依据绘制椭圆的轴端点是上下/左右,则角度零点的起始为y轴正方向/起始为x轴负方向;8、样条曲线样条曲线的闭合公差是指所画曲线对已画曲线的影响程度;9、多线对正是指设置多线格式中最上/下一条线,中(无)是指系统默认的偏移量为零的线;比例是指系统默认偏移量为±0.5两条线宽。
10、等宽线命令trace,只有画出下一条线才能看出来宽度。
11、徒手画线命令Sketch,只能使用回车键结束。
Esc键则为删除所画的。
12、修订云线输入弧长时,最大弧长最大值只能为最小弧长的3倍。
13、多段线半宽值为画出图形的宽度值的一半;多个直线可以合并为多段线;三、图元编辑1、图形选择1)左上至右下(左下至右上)选择:选择框内全部包含的图形才被选中;2)右下至左上(右上至左下)选择:选择框内包含部分的图形都被选中;3)all,选择图纸全部图形;4)唯线选择f,只有所画的线穿过图形才被选中。
5)最近选择l,最后所画的图形被选中,可依次执行。
CAD自学要点学习笔记
第一章AutoCAD 2004概述AutoCAD是Autodesk公司开发的计算机辅助设计软件,主要用于绘制机械,建筑,装饰,服装等领域图形的软件,使绘图界面更加清晰、整洁。
一、启动AutoCAD 2004“开始”──“程序”──“Autodesk”──“AutoCAD 2004”,将会自动新建文件为drawing1.dwg.二、界面组成(1)标题栏:显示当前运行软件名称及打开文件名称。
(2)菜单栏:所有命令的集合(3)标准工具栏及其他工具栏:如绘图工具栏,修改工具栏。
(4)图形窗口,即模型空间。
(5)命令行及文本窗口:“视图”──“显示”──“文本窗口”(6)状态栏:左侧──坐标区,右侧──控制区.三、图形的创建,打开与存储:(1)新建:“文件”──“新建”(2)打开:“文件”──“打开”──选择一个文件──“打开”.(3)保存:“文件”──“保存”──给文件起名字──“保存”.第二章简单绘图一、绘制直线:方法:(1)命令方式:LINE(2)菜单方式:“绘图”──“直线”(3)工具方式:点“绘图”工具栏上“直线”按钮.说明:(1)参数“C”表示创建封闭图形;(2)参数“U”表示取消上次操作;(3)指定“起点”提示时,按ENTER键表示确认;(4)利用LINE命令绘制可连续直线,但每条线段都是独立的对象.二、点坐标系(1)平面直角坐标系:(2个距离)①绝对坐标,输入点坐标形式:(X轴,Y轴).X轴:从原点起沿X轴方向上的位移距离;Y轴:从原点起沿Y轴方向上的位移距离.②相对坐标,输入点坐标形式:( @ X轴,Y轴),X轴:从上一点起沿X轴方向上位移距离;Y轴:从上一点起沿Y轴方向上位移距离.(2)极坐标系:(距离+角度)①绝对坐标,输入点坐标形式:(距离<角度)距离:从原点到目标点距离;角度:原点与目标点连线与X轴正方向夹角。
(逆时针为正)②相对坐标,输入点坐标形式:( @ 距离<角度)距离:上一点与目标点之间的距离;角度:上一点与目标点之间连线与X轴正方向夹角.第三章绘图工具1、矩形绘制方法:(1)命令方式:RECTANG(2)菜单方式:“绘图”──“矩形”(3)工具方式:点“绘图”工具栏上“矩形”按钮。
robcad学习总结
把调入的部件移动到合适的位置,选择placement editor,objects 要移 前测距离query-PTP distance • 按照测定好的距离将部件移动到目标位置
• 车身按照绝对坐标移动一定的距离,机器人 的移动,围栏的移动 • Display—modify color修改颜色,display显示 所需部件,blank隐藏部件
• 创建完成
• 安装测头 • 把测头调入-选择motion命令
选择setting命令 中的mount命令 将测头移动到机器 人上 选择测头
导入点
• 导入点 robcad——spot——weld_loce—— import将处理好的点文件导 • 点文件处理 插入列输入POINT(大写)输入 的带你名字开头必须是小写字母,插入列输 入一个字母,再将字母与点名称和运算,在 文本格式下合并运算,运算完成后就列中的 字母改成小写(lower),再将小写后的列 粘贴去掉列中的公式,把多余的删掉
• 设置保存路径,选择store菜单中的project
•
Ce文件创建成功后在layout下load cell加载文件。在get component下 调入配件
设置位置 命名
• Group-组的创建 ungroup组打散 • Co文件不能直接放在library文件夹下,要 在其下建立一个新的文件夹,再将co文件 翻入其中 • Library文件夹下一般放不可修改的文件, project文件夹下放ce问价和改动的co文件 • 快捷键F3,F6,F12,Home
Robcad软件的学习总结
打开软件设置路径
• Robcad-project-browse project tree
• 点击 my computer 找到要打开的文件
《中文版AutoCAD基础培训教程》读书笔记思维导图

06 第5章 图形编辑操作
目录
07 第6章 图块与外部参 照
09 第8章 尺寸标注
08
第7章 书写文字与应 用表格
010 第9章 三维图形基础
目录
011 第10章 获取图形对 象信息
013
第12章 商业案例实 训
012
第11章 图形打印与 输出
本书系统地介绍了AutoCAD的功能和操作技巧,包括入门知识、绘图设置、基本绘图操作、高级绘图操作、 图形编辑操作、图块与外部参照、书写文字与应用表格、尺寸标注、三维图形基础、获取图形对象信息、图形打 印与输出、综合设计实训等内容。本书内容均以课堂案例为主线,通过对各案例的实际操作,学生可以快速上手, 熟悉软件功能和绘图思路。书中的软件功能解析部分使学生能够深入学习软件功能。课堂练习和课后习题,可以 拓展学生的实际应用能力,提高学生的软件使用技巧。综合设计实训,可以帮助学生快速地掌握商业图形的设计 理念和设计方法,顺利达到实战水平。
11.3.8 打印预览
11.3.7 设置着色 打印
11.3.9 同时打印 多幅工程图
第12章 商业案例实训
01
12.1 绘制 标准直齿圆 柱齿轮
02
课堂练习— —绘制轴系 零件装配图
2
11.2 配置打 印机参数
3
11.3 打印图 形
4 11.4 将图形
输出为其他格 式的文件
5
11.5 打印圆 锥齿轮轴
01
11.3.1 选 择打印机
02
11.3.2 选 择图纸尺寸
03
11.3.3 设 置打印区域
04
11.3.4 设 置打印比例
06
11.3.6 设置打印的 方向
【ROBCAD学习】robcad关节运动设计
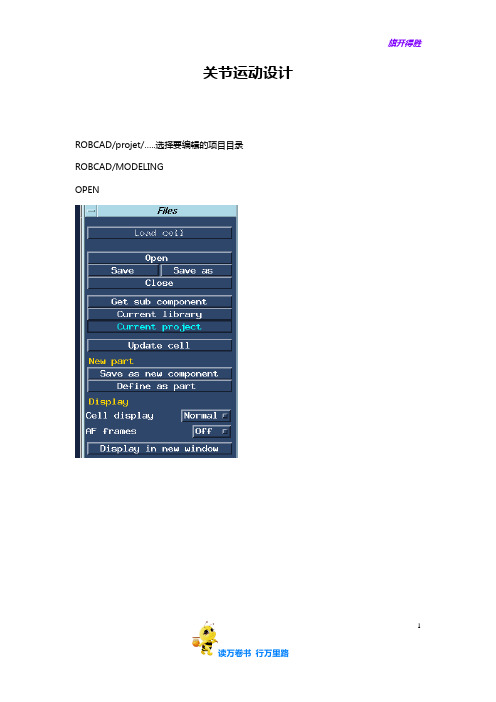
ROBCADG
OPEN
编辑元件的部件颜色
DISPLAY/MODIFY COLOR
选取相应的颜色,改变部件的颜色。
颜色编辑完成后,选取菜单的kinematics
先在要建立的关节处做好标记,选取图标菜单中的NOTE editor
选择编辑关节,选RANGE,点选CONSTANT,输入下限上限值和关节号,接受。必须要再点DIFINE后该编辑才能被确认。
删除标记
从所想定义的轴线两端分别选点来建立一条直线做轴。注意轴线的起止方向。五指张开,拇指为轴线的方向,其他四指所指的方向就是关节运动的正方向。
关节建立,选CREAT 选择父辈的LINK和子LINK,选取轴线,Revolute是圆周运动,PRISMATIC是平行滑动。接受后建立关节运动。之后要选取DEFINE确认。
关节运动的验证;选取DEVICE JOG
选取MECHANISM
选择JOINT
选择JOG,按住鼠标中键向右拉的,关节应该按照正向运动。
选择states菜单,选择EDIT
选择define state,选择设定state名称,然后在VALUE中输入相应的角度值。关节运动的STATE建立完成,返回kinematics菜单,设定关节运动的极限
选CREATEBYPICK
点选要设定的关节处选择要标记的位置,完成后选择取消点选。然后编辑该标记。
输入关节的序号和计划旋转的角度。
下面进入关节的设计阶段。
先建立LINK,即将要运动的关节部分的部件集合成一个将来可动作的部件。
在元件中选取实体,ACCEPT后LINK建立。
编辑轴线
选取直线图标
按F11和F12将选取状态定义为上图状态。
AutoCAD学习笔记
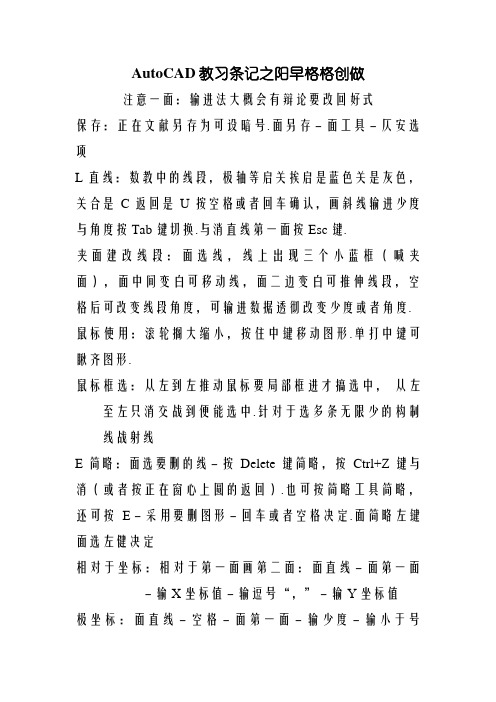
AutoCAD教习条记之阳早格格创做注意一面:输进法大概会有辩论要改回好式保存:正在文献另存为可设暗号.面另存-面工具-仄安选项L直线:数教中的线段,极轴等启关挨启是蓝色关是灰色,关合是C返回是U按空格或者回车确认,画斜线输进少度与角度按Tab键切换.与消直线第一面按Esc键.夹面建改线段:面选线,线上出现三个小蓝框(喊夹面),面中间变白可移动线,面二边变白可推伸线段,空格后可改变线段角度,可输进数据透彻改变少度或者角度.鼠标使用:滚轮搁大缩小,按住中键移动图形.单打中键可瞅齐图形.鼠标框选:从左到左推动鼠标要局部框进才搞选中,从左至左只消交战到便能选中.针对于选多条无限少的构制线战射线E简略:面选要删的线-按Delete键简略,按Ctrl+Z键与消(或者按正在窗心上圆的返回).也可按简略工具简略,还可按E-采用要删图形-回车或者空格决定.面简略左键面选左健决定相对于坐标:相对于第一面画第二面:面直线-面第一面-输X坐标值-输逗号“,”-输Y坐标值极坐标:面直线-空格-面第一面-输少度-输小于号“<”-再输进角度数值-空格.便画出一条斜线.简略画多的部分线:面线-出小圆框-面小圆框移动到念要的位子-按Esc键简略窗中下圆有:对于象捕获钮,面鼠标左键后里有垂线、圆心、切面等等,有圆框框着的是挨启的.XL构制线:便是数教里的无限少的直线,PL多段线:多段线画出的图是一个完齐的,直线画出去的是多条线组成的.多段线不妨共时画圆弧线输进A.W宽度,H半宽分别指画的线的宽度战一半宽度.如画箭头类:输W-空格-输进初面宽度-Tab-输进末面宽度(如初面末面一般宽,按空格)-回车C圆:EL椭圆:TR建剪工具:面建剪工具-空格(那时所有图形皆被选了)-面要剪的部分-空格输TR-按二次空格-面选所剪部分-空格面建剪工具-框选所要建改的局部图形-按空格-面选剪切-空格纸号尺寸E(不拆订)C(另三边)A拆订边A0 841×118920 10 25A1 594×84120 10 25A2 420×59410 10 25A3 297×42010 5 25A4 210×29710 5 25F倒圆角:面倒圆角-空格-输半径号R-空格-输半径值-面选二边.下一支配如果一般间接控空格便止. RO转动:面转动按钮-选要转动图形-面选指定基面(转动圆心)-跳出输角度框后输C(如不复制本图形便输进角度)-空格-输进角度-空格CO复制:Shift+C复制 Shift+V粘揭MI镜像:面钮-空格-框选所要图形-面选镜像线一面二面-空格REC矩形:面矩形钮-面第一角面-输进X数据-输逗号“,”-输进Y数据-空格.X领会:不妨把多段线或者如矩形一类的单线,图形线分成多根线组成的.面领会-面图形-空格O偏偏移:不妨当仄止线去画,选偏偏移-输进偏偏移距离-空格-面要偏偏移的那一边-空格M移动:SPL样条直线:可用于画不准则的园孤,退出按三次空格POL正多边形:面正多边形钮-输进边数-空格-面选核心面-面内接或者中切于圆-输进圆半径-空格面:要按ESC钮才搞退出,2007里正在;圆法-面样式,里不妨改变面形.DIV定数仄分:把一条线均分成几份ME定距仄分:把线按念要的少度分H图案弥补:面选弥补钮-正在跳出的窗心内选图案、比率、角度-面窗心内增加(拾起面或者采用对于象)-空格-面图内要弥补的场合-空格-回窗心内面决定可用去画剖里线或者上颜色弥补窗左下角“>”键,面一下可挨启弥补岛选项.弥补窗里有渐变色,可挨启采用.拆置图形:AutoCAD可正在support文献里粘揭图案用.REG里域:仄里图形经里域后可推伸成三维图形.画出图形-面里域-面选图形-空格.建订云线:可把直线改成海浪线天区覆盖:把本去的图案遮关.S推伸:面建改-面推伸-从左背左框选要推伸图形那部分-空格-面选面推动不克不迭从左到左选,也不克不迭局部选.SC缩搁:面建改-面缩搁-框选图形-空格-面选基面(不动的面)-输进念缩搁的比率数值(也可:现要的数/本数)-空格缩搁战鼠标中键滑动纷歧样,缩搁是能把图形尺寸也搁大,鼠标中键滑动只相称于是推近或者搁近瞅瞅尺寸稳定.ES蔓延:面蔓延-空格-面要蔓延的线-面ESC键退出也可:面蔓延-面要蔓延到的线-空格-面要蔓延的线-空格(那样不妨一次蔓延到隔着很多线的场合)AR阵列:可一次画出很多矩形或者圆形排列的图形,面阵列-正在跳出窗心内采用止、列、偏偏移、角度-面窗内采用对于象-跳到所画图形内面本画佳的矩形-空格-正在窗心内面确认(止偏偏移前加-号是背下)画圆形的面环形阵列.偏偏移的角度不妨正在图中面选后回窗心内便有.环形阵列:采用佳后先面核心面再面选对于象BR挨断战挨断于面:BR挨断,不妨用于简略一条线里某一段.挨断于面:便是把一条线分成二条相接的线.左视图战俯视图要先画一条45度线去与面画制国标:细真线线宽为D,细真线、真线、面画线、海浪线等线宽为D/3LA图层分歧的线设身分歧的图层,省得每画一种线皆得沉设,改换也便当.树立佳后要把中间颜色、线型、线宽小窗等改成ByLayer的(意义是随图层变更)用模板保存图层:设佳图层-文献-保存-文献典型里选图形典型-改一个自己念要的文献名-保存用时挨启硬件后-文献-新建-找自己存佳的典型找启.(用那种办法还不妨把自己念要的标注圆法所有存下去用)LTS非连绝线性比率:能让面画线、真线等不连绝的线内段变少或者短输LTS-空格-输进比率-空格那样一调所有的图层非连绝线皆被变动比率了,如要单独安排一条线可单打那条线,正在跳出的窗心内安排比率.图层匹配:圆法-图层工具-图层匹配-面选要改的线-空格-面源目标线MA个性匹配:可按一条线的格式变动别的线.输MA-空格-面源目标线(出个扫帚形图标)-面要改的线-空格图层断绝:便是把一个很多图层的图中的某线图层隐躲. 面图层断绝-面要的图层线-空格(战一个个去关图层一般效验)图层程序:可安排图层.左键面一条线-面左键-画图程序-前置、后置等标注前要先到标注式样(快速键D)里树立佳再标注DLI线性标注DAL对于齐标注DAN角度标注DRA半径标注DDI直径标注直径标记用%%C写出.线性标注直径:面选二端面-输进T-空格-输%%C战直径数值-回车DAR弧少标注坐标标注:便是标出一面的坐标值:面选要目标面背安排推是目标X值,进与下推目标是Y值.ARC圆弧D标注式样管制器:圆法-标注式样-正在弹出的窗心内建改DCO连绝标注:采用一个相映的标注,以上一个标注的第二条尺寸界线为前提,继启上一标注的个性.DBA基线标注:战连继标注分歧的是,以一条线为基准标下去.LE单引线标注:用于标注倒角等,%%D角度标记,标注后念移动笔墨要输进X挨集.面标注-引线-面要标注的线-面出标注线-输进尺寸-回车如要移动笔墨:面数字或者标注线-输X-空格-面选笔墨基面-空格-拖动到念要的场合.笔墨光标后按左键-便可采用出-输进键盘出不去的标记.极限偏偏好标注:仄常标注尺寸后单打尺寸正在跳出的个性窗内去改写:前缀、后缀、偏偏好、上偏偏好尺寸、下偏偏好尺寸、偏偏好细度等.注意下偏偏好尺寸它是背值,如果下偏偏好值是正值的要加背号.T多止笔墨:画图-笔墨-单止或者多止-指定笔墨下度-角度等DT单止笔墨 ST笔墨样式I拔出M移动%%C直径%%D角度%%P正背号细糙度:先画出细糙度标记,再写进笔墨,再移动到念要的场合.也可用块树立.堆叠:标记“^ ”如要输8的7次圆:输进87后输^-选7^面-左键-堆叠-左键如输火分子式:输H-输^-输2-选^2-面左键-堆叠^正在前堆叠数正在下,正在后数正在上.B创制临时块:先画佳图形-面画图-块-创制-跳出窗心内面采用对于象-框选所画佳图形-空格-回窗中内面拾起面-面选图形一面-空格-窗内面决定W永暂块:能恒暂保存使用,战创制临时的一般.多用那一种,临时块不克不迭用正在别的图,关机后便删掉了.使用时:拔出-块-欣赏-找到所要图形挨启-决定罕见据块树立(如细糙度):画佳图-画图-块-定义属性-窗心内标记表记标帜输进数据-决定-把数据移到所画图形里-空格-加进永暂块树立.搞佳后拔出块便能正在图上输进念要的数据.等轴测图画制:正轴测与斜轴测图:正:Z轴笔直,XY轴各120度斜:XY、YZ轴135度,XZ轴90度,Y轴背伸缩率0.5,ZY轴背伸缩率为1.工具-草图树立-捕获典型-等轴测捕获-决定正接挨启,便只可画二目标的线,用F5切换上、左、左三里(线目标).偏偏移战镜像不克不迭间接用,矩形不克不迭用,圆不克不迭用只可椭圆去画,面椭圆后输I.倒圆角不克不迭用,只可是找出圆心画圆后建剪.标注用对于齐标注:要念标得战仄里一般:标注后面偏偏移,上下90度,安排30度,前后150度.标注的笔墨要正在笔墨式样里新建正30度,背30度二种,正30度是顺时针转,背是顺时针转.三维图形按住鼠标中键移动,滑动搁大缩小,按SHIFT键加鼠标中键转动三维图形.转动三维图形到念要的目标,面选视图命名,可把自己念要的视角保存牢固.左上角有个键,也能上下安排前后侧角视安排视角.面工具-查询-里域/品量个性-面选图形-空格,可查出图形的体积等.视图-视觉样式-可面选二维、三维、真正在仄分蔑视觉图BOX少圆体:画图-建模-少圆体-面选第一面(或者输进第一面坐标)-输进X尺寸-Tab键-输进Y尺寸-回车-输下Z尺寸-空格或者回车主笔少圆体:把光标搁三箭头上,变黄色便可正在那根轴上移动,面那些假面可变少宽下.WE楔形:面楔形-面角面-输X值-Tab-输Y值-输Z 值(下,正在YZ里上)圆环:第一个半径是圆环核心半径,第二个半径是管(圆环管)半径.SU好集:A体减B体面好集-选A-空格-选B-空格UNI并集:A体合并B体面并集-选A-选B-空格图形出完毕时最佳不要并集,一并成一体了念改便易了. UCS:自定坐标目标输UCS-面坐标面-三坐标上出真线-推动真线面决定为X轴-依次推动决定Y、Z二轴.用于画横起去的图形面工具-新建-内里有很多办法可建坐标-命名:可把自定的坐标命名保存以便当使用.TAN相切:三维图里用另类建剪:面建剪-面鸿沟线-空格-面剪的线EXT推伸:不过推伸下度(Z轴),画制出图形-面里域REG-框选图形-空格-输EXT-选图形-空格-输推伸数值-空格沿路径推伸:先画路径线-正在路径线端头画出推伸图形-里域后-输EXT-输P-面图形-空格-面路径-空格圆弧形推伸要提起边后才搞推伸:面建改-三维支配-提与边-面要推伸的里-空格-EXT-空格-选边线(本真面后变真)-空格-输P-面路径线扫掠:可使图形按路径推伸,画七直八扭的管讲什么的很佳用.用比率可使图形一头大一头小,有扭直可转动图形可用于画螺纹.画推伸的图形-画门路-面里域-面选图形-空格-面扫掠-面选图形-空格-输比率或者扭直字母(如是一般推伸可不输)-输数据(比率或者角度,一般可不输)-面门路不妨扫掠直里(随意画出的线)画偶形怪状的框形物品最佳用.搁样:画搁样的最少二个里-面搁样-面选里-空格-采用导背、路径等(或者空格)-搁样树立框内选(或者空格完毕)-决定REV转动:以顺时针为正目标,转动图形不克不迭正在转动轴上,只可位于轴一侧.转动一个完齐出去的是真体,共一图形如果不经里域,出去的是直里(网格).多段体可建墙体.搞涉查看:检测二个真体有不相接部分. 面搞涉-面选一图形-面选二图形-空格接汇部分会变色.建改-真体编写-剖切:面剖切-选图形-空格-面剖里上的三个面-面留着的那部分加薄:直里不薄度不是真体,加薄可把它形成有薄度的真体.面加薄-选直里-空格-输薄度值-空格压印:将二维图形压印正在三维图形上,从里正在仄里上创制更多的边. 正在三维体上画出图形-压印-选三维真体-选所画图-Y-空格-Esc退出(图形只可一个一个选)着色边:单独变动一条边颜色.面着色边-面选边-空格-选色-决定(正在真体上出改变,正在三维线框上才搞瞅出)推伸里:选里上一面是推伸一个里,选一条边是推伸二个里.推伸里-面选里-空格-输下度-回车倾斜:面倾斜-面选里-倾斜轴-输进角度值-回车移动里:面移动里-面选里-按住Shift键面选多了的里-空格-面基面-面移动到的位子(不妨把真体内的图形移动位子,那是与推伸里分歧的场合.)偏偏移里:不妨推伸,或者搁大缩小里.面偏偏移里-面选里-按住Shift键面选去掉多了的里-空格-输进数值-回车(可用去搁大缩小图形中的圆孔,搁大是背值,缩小是正值)比圆要建改一三维图形中的圆孔,要移动位子便用移动,要搁大缩小便用偏偏移.要围着一条轴转便用转动里复制里:面复制里-面要复制的里-空格-面里上基面-面要复制到的面简略里:面简略里-面选要删的里-空格(用于简略真体内圆角倒角等)转动里:面转动里-面要转动的里-空格-面选转动轴-输进角度值-空格着色里:面着色里-面选里-空格-选颜色-决定-Esc退出分隔:二个或者多个不正在所有,并集或者好集后的真体,用分隔把它们分启.二相接并集的图形:按Ctrl键-鼠标移动到图形采用一图-输M-空格-面选移启-面分隔-面选任一图形-退出抽壳:将三维体变换成中空真体,其壁有指定薄度.面抽壳-面选三维体-面要删的里(不妨是几个里,如果一个里不选那中间便成空的)-空格-输壳体数值-退出螺旋:画图-螺旋-指定核心面-指定底里螺纹半径-顶里螺旋半径-下度(指定下度前可输进T、H、W决断圈数、圈下、扭直等)OP选项:隐现里可变动细度,让画出去的圆更透彻.对于齐:可把二个真体准确接正在所有. 面三维对于齐-面要移动的真体-空格-面要连的里的三个面-面不动体接里的三个面三维阵列:矩形:X背为止,Y背为列,Z背为层.面建改-三维支配-三维阵列-面要阵列的图形-空格-选矩形-止数-空格-列数-空格-层数-空格-止距-空格-列距-空格-层距-空格环形:面建改-三维支配-三维阵列-面要阵列的图形-空格-选环形-输阵列数-空格-弥补角度(顺时针转为正,顺时针转为背)-空格-是可转动图形-选转动轴二面-空格网格:网格变动:图元-镶嵌细分-设定少宽下去变动格数分隔网格:先画辅帮线-面分隔网格里-选要分隔里-面分隔的第一面第二面(只可一个网格一个网格分)移动里:按疑Ctrl键移鼠标面选移动里出坐标-面一下坐标变黄的那个目标便能推动(面左键可选转动等)推伸里:移动里会做用相邻里(相邻里会变更),而推伸里不做用相邻里.三维标注:标注皆是正在XY轴里上的,分歧的里上要把坐标先改佳.背景树立:面工具-选项-隐现-颜色-。
CAD课堂笔记

AutoCAD课堂笔记编制:万老师此课堂笔记仅限万老师学员使用未经许可不得另作它用轻轻的一天天一年又一年长大后我们是否还会再唱起心愿AutoCAD第一讲1.认识AutoCAD: AutoCAD是美国Autodesk公司开发的、当今世界最流行的计算机辅助绘图设计软件包,也是工程设计的一种通用、基础软件,具有速度快、精确率高等优点,且易于掌握。
AutoCAD有R14、2000、2002、2004等版本,现在已可以在市面上找到最新的AutoCAD2006版。
2.启动和退出AutoCAD:✧启动:双击桌面AutoCAD图标或右键单击图标再打开,或执行开始程序AutoCAD✧退出:单击右上角关闭图标或执行文件退出,或输入快捷命令EXIT/QUIT3.工作界面介绍:标题栏,菜单栏,工具栏,绘图区,命令行,状态栏。
4.鼠标的使用:左键选择(拾取),右键快捷菜单(可以设置为确定功能),中键滚轮可缩放或平移,Shift+左键(循环选择)5.CAD文件格式(扩展名):dwg和dxf6.文件操作:新建(new)、打开(open)、保存(save),7.直线:由起点和终点来确定,可以一次画一条线,也可以画多条连续的线(每条线之间彼此独立)。
执行绘图直线(L )8.实时平移(P)、实时缩放(Z回车二次)9.图形的概念:图形是由几何线条和尺寸线条构成.尺寸线分几何尺寸和相对位置尺寸AutoCAD第二讲1.偏移:由一个对象往某一方向通过指定距离生成另一对象,可用于创建同心圆、平行线、等距曲线等。
执行修改偏移(O )2.修剪:利用边界对图形对象进行修剪。
执行修改修剪(TR )[ 两种类型:1.标准修剪 2.快速修剪(回车二次)]3.相对极坐标:@长度<角度,通过两点来确定图形的一种方法,可用于绘直斜线等。
(注:角度的计算方法从X轴正向逆时针方向旋转。
)5.相对坐标:@X,Y ,指某一点相对于某一点4.旋转:将一个或多个对象绕一点旋转指定的角度,从而改变目标对象的位置。
Robcad使用教程
在创建特征时,您可以选择应用材料属性,如密度、弹性模量等,以模拟实际材料的特性。
选择特征类型
在Robcad中,您可以创建各种特征,如凸台、凹槽、倒角等。选择“创建特征”命令,然后选择所需的特征类型。
特征创建
导入组件
01
在Robcad中,您可以将其他CAD文件导入到装配中。选择“导入组件”命令,然后选择要导入的CAD文件。
文件操作
缩放视图
在Robcad中,您可以使用鼠标滚轮或缩放工具来缩放视图,以便更好地查看模型的不同部分。
平移视图
在Robcad中,您可以使用平移工具来移动视图,以便查看模型的更多区域。
旋转视图
在Robcad中,您可以使用旋转工具来旋转视图,以便从不同角度查看模型。
视图操作
03
02
01
03
复制部件
优化结果
Robcad会提供详细的优化报告,包括优化前后的对比、优化过程的图表等,帮助用户更好地理解优化效果。
优化目标
Robcad的优化设计功能可以帮助用户根据不同的优化目标,如效率、路径长度、运动平滑度等,对机器人进行优化。
优化设计
工程图模板
Robcad内置了丰富的工程图模板,用户可以根据需要选择合适的模板进行工程图生成。
碰撞检测
Robcad支持多种碰撞类型,包括几何碰撞、运动碰撞和干涉碰撞,以满足不同场景的需求。
碰撞类型
Robcad会以高亮显示、声音提示或报告的形式输出碰撞结果,方便用户及时发现和解决潜在问题。
碰撞结果
碰撞检测
优化算法
Robcad采用了多种先进的优化算法,如遗传算法、模拟退火算法等,以实现高效、准确的优化结果。
该软件广泛应用于汽车、航空、电子、家电等制造业领域,为工业自动化提供强大的技术支持。
robcad操作一些技巧
上海君屹以下是robcad学习和练习中的一些小的技巧,仅供大家参考上海君屹1.先单击robcad菜单,并选择modeling2.点击open3.随便输入个component名称和选择in 方式3随便输入一个cell4.点击accept上海君屹5.选择save as new component6.选择相关的元素在p栏命名个名称ponent栏命名一个名称8.accept确定上海君屹9.新生成的component在project文件夹下2.使用vrml格式输出零部件文件上海君屹1.选择需要输出的对象,多选时使用ctrl键2.右键单击,选择display only右键单击选择3.按下F4键4.选中screen to VRML 1 (.wml)file5.点击ok6.生成文件在cell文件夹下3.添加顺序运动的步骤上海君屹11.在op2上单击2.在弹出的窗口中单击operation3.然后选择op3,那么op2出现在文本框中4.单击accept确定5.op2的路径执行顺序会排列在op3之后序会4.Status window下菜单项的调出上海君屹鼠标放在窗口上时按Ctrl+M键1.把鼠标放在status window窗口上22.按下Ctrl+M键,此时出现三个菜单3.在Options中可以设置各轴的数值以百分比显示5.如何使component能编辑上海君屹1.单击data菜单2.选择library utilities择g3.选择get for edit4.进入相应的library里面以选择需要编辑的零件6.把一般的frame定义成working frame上海君屹1.按F12键,选择entity模式1键选择tit2.在frame上右键单击3.Set working FrameÆSelected3S t ki F S l t d7.如何给机器人添加dress上海君屹1.点击工具箱中的brower按钮7.添加dress上海君屹2.选中component3.选择library,即零件所在的文件夹4.默认选项“get part”7.添加dress上海君屹5.选中相应的dress,使其选项显示白色6.点击insert7.添加dress上海君屹接下来设置动作7.点coupling上海君屹8.用add添加dress上随机器人4、5、6轴转动而从动的轴上海君屹驱动机构单元驱动轴从动机构单元从动轴驱动比例接受确认上海君屹1.选择工具箱中的view按钮上海君屹2.当视图调整好以后,按create来创建浏览视图8.工位视角的变换操作上海君屹3.点击add中的change to view8.工位的视角的变换上海君屹4.选择之前生成的视角视图,并设置steps9.机器人添加第七轴上海君屹9.机器人添加第七轴上海君屹1.按F12键,切换到entity状态2.点击attach,然后把机器人底座attach到滑轨上9.机器人添加第七轴上海君屹3.激活相应的机器人4.点add,然后添加上第七轴5.当记录location的时候点击mark comp就可以了10.快速添加target路径的方法上海君屹1.先显示出来path2.点击target后再在窗口中的路径上单击鼠标左键11.添加F12快捷键中的part选项上海君屹1.找到安装文件中的.robcad文件,用记事本打开2.找到flip_pick_level行,然后在后面输入part单词,并保存文件上海君屹注意:当出现选项注意当出现选项时,选“no”11.找到超级装配co文件,并把其调到project下以编辑上海君屹232.找到超级装配co 文件中相应的子零件,即被替换零件 3.找到library 中的替代的零件14.Dxf转换上海君屹转换成DFX1.先把n个零件存成1个co文件2. dataÆcad ExportÆdfxÆexport由DFX转换成co文件1.线条要打散,否则转换有可能不会成功1线条要打散否则转换有可能不会成功2.dataÆcad ImportÆdfxÆexport上海君屹1.进入到modeling模式,然后选工具箱中brower按钮上海君屹2.像添加dress一样调入carpart 零件,以完成超级装配16.零件属性查看上海君屹1.选中工具箱中的tree2.选中需要查看的零件3.右键单击,选择属性以查看上海君屹1.使用brower调入新零件上海君屹2.在spot模块中选择move to component上海君屹3.旧零件上的location一定要选定,最后确定18.重命名的一种快捷方法上海君屹youtÆdeleteÆclose 目的是激活1layout2. 在输入框中输入“rename”,然后回车3. 在component状态选中需要重命名的目标4. 重命名,并确定4重命名并确定* 可以批量改名,工位再次打开后名称才有效*19.焊枪只更改连接角度时的操作上海君屹1.先导入具有动作的焊枪模型2. 如果要删除某一部分,那么首先要把其从link中去除,2如果要删除某部分那么首先要把其从li k中去除然后再删除对象,否则可能动作丢失3. 在反显的模式下调入更新后的枪模型,并保留其需要的部分,这样不必再重新定义动作4. 保存或者另存为,然后退出上海君屹1.在桌面上新建一快捷方式图标2.选属性,把起始位置处的路径替换成相关的项目路径上海君屹3.接下来设置library 3lib上海君屹4.最后选择user project 接受确认21.生成零件的预览视图上海君屹1.先点这里2.再点这里。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
李无衣 2011.11.26
part 是compenment 是依附关系吗??类似结构树的上下层的概念吗?
可生成一个新的
co,
成功的保存出来,在硬盘上也看到了,在倒入时结果没看到!其他2.例如,自定义的焊点,我在SPOT 模块下创建的焊点,如何反倒到表格中
Excel? 程序可以反倒,焊点也应该能反导出来?笨方法:一个焊点一个焊点的找,直到找完整,找到筋疲力尽,眼花头晕!写到Excel
中,笨但是这是一个方法!聪明方法:不知道。
3.如何在model 模块中
添加新的,添加后发现不对,如何删除呢?
1.在cell 中新OPEN,打开要删除的东西,入红色标注的。
2.点击
3.按下F12
4.点要删除的东西,要一点点的删除,不能整个的删除。
学习过程疑问
penment,part 从cell 中新保存出来,类似catia 中的PRODUCT 和part 的概念吗??
5.到CELL中保存。
4.envelope
机器人工作范围,也可以理解成机器人的危险区域,在这个范围里,人应该避让!。