12.RobotFans——超声波模块
机器人智能算法与应用考核试卷

C.遗传算法
D.强化学习
9.下列哪种方法不适合用于机器人抓取?()
A.位置控制
B.力控制
C.速度控制
D.视觉伺服
10.下列哪种算法主要用于机器人的状态估计?()
A.卡尔曼滤波
B.滑动平均滤波
C.高斯滤波
D.中值滤波
11.下列哪种技术不属于机器人视觉导航?()
A.地图构建
B.路径规划
C.传感器融合
A. SIFT
B. SURF
C. HOG
D. PCA
8.以下哪些算法可以用于增强学习?()
A. Q学习
B.深度Q网络
C.策略梯度
D.支持向量机
9.在机器人控制中,以下哪些属于自适应控制方法?()
A.模糊控制
B.遗传算法
C.神经网络控制
D.滑模控制
10.以下哪些方法可以用于机器人抓取物体的姿态估计?()
()
标准答案
一、单项选择题
1. D
2. D
3. C
4. C
5. D
6. C
7. D
8. D
9. D
10. A
11. D
12. D
13. A
14. D
15. D
16. A
17. D
D
19. C
20. D
二、多选题
1. ABD
2. ABCD
3. AB
4. ABC
5. ABC
6. ACD
7. ABC
1.机器学习中的监督学习算法不需要标注数据。()
2.深度学习中,卷积神经网络主要应用于图像处理领域。()
3.在机器人的路径规划中,Dijkstra算法总是能找到最短路径。()
常用超声波模块
常用超声波模块
以下是常见的超声波模块:
1.HC-SR04:该模块使用4个引脚,非常常见,可通过触发和回波来
进行距离测量。
2.JSNSR04T:这是一款基于HC-SR04的超声波传感器模块,具有防水
设计和长距离距离能力。
-015:这款超声波模块使用了5个引脚,包括VCC、GND、TRIG、ECHO和PWM输出。
4. LV-MaxSonar-EZ1:这是一款精度较高的超声波传感器,最大探测
距离可以达到6.5米。
5.SRF05:这款超声波模块采用了双晶体设计,提供了更高的探测精
度和稳定性。
6.SRF06:这个超声波模块也是双晶体设计,可以测量距离、高度和
宽度。
7. XL-MaxSonar-AE:这是一款高精度的超声波模块,可以进行距离
和障碍物检测,最大探测距离可以达到10米以上。
8. MB1240 XL-MaxSonar-EZ4:这是一款可靠稳定的超声波模块,特
别适用于室外环境和噪声较大环境下的距离测量。
机器人编程——考试题库(50题) (1)

机器人编程——考试题库(50题)1.如果机器人正在充电,充电警示灯会显示为()。
[单选题] *A、蓝色B、红色(正确答案)C、绿色D、橙色2.从盒子里取出NAO之后,轻轻地设置NAO为()的姿势。
[单选题] *A、站立B、平放C、蹲坐(正确答案)D、靠墙3.如何让机器人播报IP地址?() [单选题] *A、在开机状态下,单击机器人胸部按钮一次(正确答案)B、在开机状态下,单击机器人胸部按钮二次C、在任意状态下,单击机器人胸部按钮一次D、在任意状态下,单击机器人胸部按钮二次4.NAO机器人有()自由度 [单选题] *A、25(正确答案)B、27D、285.下列哪一种不是NAO机器人可以使用编程语言?() [单选题] *A、ChoregrapheB、JAVA(正确答案)C、PythonD、LabVIEW6.下列哪一个是NAO机器人自身的编程软件() [单选题] *A、Choregraphe(正确答案)B、JAVAC、PythonD、LabVIEW7.机器人播报IP地址为()位数字组 [单选题] *A、1B、2C、3D、4(正确答案)8 .LabVIEW的“新建”窗口可以创建三种类型的文件,我们使用NAO机器人编程时,使用的是()文件类型。
[单选题] *A、PythonB、VI(正确答案)D、其他文件bVIEW 的程序框图窗口的工具栏按钮与前面板工具栏大致相同,额外增加了()个调试按钮 [单选题] *A、4(正确答案)B、3C、2D、110. LabVIEW的前面板窗口与程序框图窗口可以通过()快捷键来进行互相切换操作。
[单选题] *A、Ctrl+CB、Ctrl+TC、Ctrl+AD、Ctrl+E(正确答案)11 .Choregraphe中Say语音指令盒归属于() [单选题] *A、Audio中的Sound指令盒中B、Audio中的Voice指令盒中(正确答案)C、Motion中的Animations指令盒中D、Templates中的Dialog指令盒中12.Choregraphe中编程都是在()中进行的。
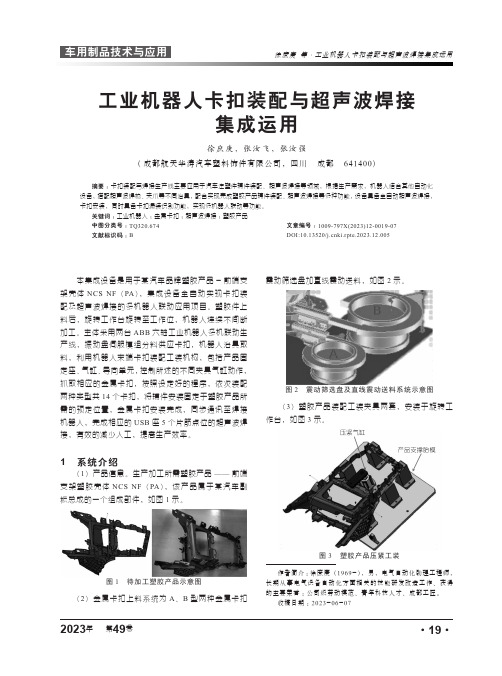
工业机器人卡扣装配与超声波焊接集成运用
作者简介:徐庶庚(1969-),男,电气自动化助理工程师,长期从事电气设备自动化方面相关的技能研发改造工作、获得的主要荣誉:公司级劳动模范、青年科技人才、成都工匠。
收稿日期:2023-06-07本集成设备是用于某汽车品牌塑胶产品-前端支架壳体NCS NF (PA ),集成设备全自动实现卡扣装配及超声波焊接的多机器人联动应用项目。
塑胶件上料后,旋转工作台旋转至工作位,机器人连续不间断加工。
主体采用两台ABB 六轴工业机器人多机联动生产线,振动盘伺服模组分料供应卡扣,机器人治具取料,利用机器人末端卡扣装配工装机构,包括产品固定座、气缸、导向单元,控制所述的不同夹具气缸动作,抓取相应的金属卡扣,按照设定好的程序,依次装配两种类型共14个卡扣,将辅件安装固定于塑胶产品所需的预定位置,金属卡扣安装完成,同步通讯至焊接机器人,完成相应的USB 座5个片筋点位的超声波焊接,有效的减少人工,提高生产效率。
1 系统介绍(1)产品信息。
生产加工所需塑胶产品——前端支架塑胶壳体NCS NF (PA ),该产品属于某汽车副板总成的一个组成部件,如图1示。
图1 待加工塑胶产品示意图(2)金属卡扣上料系统为A 、B 型两种金属卡扣工业机器人卡扣装配与超声波焊接集成运用徐庶庚,张汝飞,张汝强(成都航天华涛汽车塑料饰件有限公司,四川 成都 641400)摘要:卡扣装配与焊接生产线主要应用于汽车注塑件辅件装配、超声波焊接等领域,根据生产需求,机器人结合其他自动化设备,搭配超声波焊枪、夹爪等不同治具,配合实现完成塑胶产品辅件装配、超声波焊接等多种功能,设备具备全自动超声波焊接,卡扣安装,同时具备卡扣漏装识别功能,实现多机器人联动等功能。
关键词:工业机器人;金属卡扣;超声波焊接;塑胶产品中图分类号:TQ320.674文章编号:1009-797X(2023)12-0019-07文献标识码:B DOI:10.13520/ki.rpte.2023.12.005震动筛选盘加直线震动送料,如图2示。
智能机器人技术应用考核试卷

C.机器翻译
D.图像识别
8.以下哪个不是常见的机器人操作系统?()
A. ROS
B. Android
C. Ubuntu
D. Windows
9.在智能机器人技术中,以下哪个概念与“深度学习”最不相关?()
A.神经网络
B.数据挖掘
C.专家系统
D.卷积神经网络
10.下列哪个不是智能机器人传感器的一种?()
B.决策树
C.神经网络
D.集成学习
17.以下哪些是智能机器人操作系统(ROS)的特点?()
A.开源
B.跨平台
C.组件化
D.高效性
18.以下哪些技术可以用于智能机器人的图像识别?()
A.卷积神经网络
B.深度信念网络
C.支持向量机
D.随机森林
19.智能机器人在农业领域的应用包括以下哪些?()
A.自动播种
10.人工智能的目标是让机器能够模拟人类的__________和__________。
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
1.智能机器人的感知系统只能接收外部信息,不能发送信息。()
2.在深度学习中,卷积神经网络通常用于图像识别任务。()
3.机器人路径规划中,A*算法保证了一定能找到最短路径。()
A.红外传感器
B.超声波传感器
C.激光雷达
D.电阻传感器
11.以下哪些技术可以用于智能机器人的语音识别?()
A.声学模型
B.语言模型
C.隐马尔可夫模型
D.计算机视觉
12.智能机器人在服务行业中可以承担以下哪些任务?()
A.客户服务
B.清洁工作
1.RobotFans 主控板介绍

RobotFans主控板1、概述RobotFans是一个基于Arduino Uno针对教学用途,升级改进的主控板。
它拥有强大的驱动能力,输出功率可达18W,可以驱动4个直流电机。
精心设计的色标体系,与传感器模块完美匹配,8个独立的RJ25接口,轻松实现电路连接,非常方便用户使用。
另外,它不仅支持绝大多数Arduino编程工具(Arduino /Scratch/ardublock),而且我们提供了Mixly(米思齐)图形编程工具。
2、技术规格●工作电压:5V DC●运行电压:6-12V328P●尺寸:80x60x18mm(长x宽x高)3、功能特性●完全兼容Arduino;●配备专用RobotFans Arduino库函数,简化编程难度;●支持Mixly适合全年龄用户;●使用RJ25接口连线十分容易;●模块化安装,兼容乐高系列;●集成双路电机驱动。
4、接口介绍●主控板一共有8个RJ25接口,接口上有六种不同颜色标签。
下图表是相对应的颜色与功能:颜色功能使用此接口的Me 模块红色代表输出电压值为6-12v,通常连接到需要6-12v 电压的电机驱动模块电机驱动模块舵机驱动模块步进电机驱动模块单向数字接口∙超声波模块∙彩色LED 模块∙限位开关双向数字接口∙七段数码管模块∙人体红外传感器模块∙快门线模块∙巡线传感器模块∙红外接收模块硬件串口∙双模蓝牙模块模拟信号接口∙光线和灰度传感器模块∙电位器模块∙摇杆∙按键模块∙声音传感器模块I²C 接口∙陀螺仪模块图1接口和与之对应的Arduino针脚,主控板背面丝印有接口信息5、接线方式1.以下例子将向您展示如何使用Arduino IDE来控制声音传感器:A)首先将主控板与电脑通过Micro-USB线连接,并将声音传感器连接到6号接口。
B)创建新的Arduino IDE文档,并将如下代码拷贝到IDE。
C)将程序上传到主控板。
D)完成以上步骤后打开串口监视器,便可以观察到输出的数值随声音增大而增加。
最新全国青少年机器人技术等级考试-二级理论模拟题(A卷)
最新全国青少年机器人技术等级考试-二级理论模拟题(A卷)最新全国青少年机器人技术等级考试-二级理论模拟题(A卷)机器人二级理论考试模拟题(A卷)(满分100分)一、单选题(每题2分,共30题)1.下列人物中,哪位发明了电灯?(C.爱迪生)A. 牛顿B. 熊大C. 爱迪生D. 爱因斯坦2.首届机器人世界杯在哪举办?(日本名古屋)A. 法国B. 日本C. 美国D. 英国3.机器人控制系统从基本原理和系统结构上可以分成哪两类?(A)A. 非伺服型系统和伺服型系统。
B. Windows系统和苹果系统。
C. 仿真型系统和非仿真型系统。
D. 大系统和小系统。
4.下列说法正确的是?(A)A. 凸轮机构一般有凸轮、从动件和机架三个构件组成。
B. 凸轮机构一般有凸轮、主动从件和机架三个构件组成。
C. 凸轮机构一般有凸轮、从动件和主动件三个构件组成。
D. 凸轮机构一般有圆轮、从动件和主动件三个构件组成。
5.下列事物中,有曲柄装置的是(A)A. 自行车B. 自动晾衣架C. 电视机D. 以上都有6.火车在长直的轨道上匀速行驶,门窗紧闭的车厢内有一人向上跳起,发现仍落回原地,这是因为?(C)A. 人跳起厚,车厢内空气推着他向前运动。
B. 人跳起到落地时间过短,偏后的距离看不出来。
C. 人跳起到落地,在水平方向上人与车有相同的速度。
D. 人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。
7.(B )被称为“工业机器人之父”。
A. 阿西莫夫B. 英格伯格C. 诺伯特D. 弗里茨8.下面哪个不是机器人系统的基本结构?(B)(基本结构有:机械本体、驱动伺服单元、计算机控制系统、传感器系统、输出输出系统接口)A. 机械本体。
B. 人。
C. 计算机控制系统。
D. 传感系统。
9.工业机器人出现是在(C)世纪。
A. 18B. 19C. 20D. 2110.(C )决定了从动件预定的运动规律。
A. 凸轮转速。
B. 凸轮大小。
C. 凸轮轮廓曲线。
MAX BOT 机器人组装说明书

MAX:BOT机器人组装说明书目录认识新朋友 (1)STEP1 安装电机到车身 (3)STEP2 安装电池盒到车身 (4)STEP3 安装喇叭到电路板 (6)STEP4 安装电路板到车身 (8)STEP5 安装驱动车轮到车身 (10)STEP6 安装支撑轮到车身 (11)STEP7 安装碰撞传感器到车身 (12)STEP8 安装巡线传感器到车身 (13)STEP9 安装超声波传感器到车身 (14)STEP10 安装灯带到车顶 (16)STEP11 安装车顶到车身 (17)STEP12 安装Micro:bit (18)实物图片驱动车轮2 电路板1碰撞传感器2 双面胶1巡线传感器1 导线7MicroUSB 连接线1 直流电机2超声波传感器1灯带2 其他工具若干 —— —— —器材准备齐全后,接下来就要正式开始组装Max:bot 啦,你准备好了吗?所需元件电机*2,十字槽盘头螺钉及螺帽*2,车身*1,十字套筒*1安装步骤按照下图所示把两个电机固定在车身底座(注意:为了方便后续接线,请将两根电机线穿过车身后端)所需元件电池盒*1,魔术贴*2,车身*1安装步骤在车身底座和电池底部各安装一个魔术贴(见下图)按照下图所示位置把电池固定在车身底座(注意:电池线要从车身后面穿出。
)STEP3 安装喇叭到电路板所需元件电路板*1,喇叭模块*1,支柱*4,大头平尾自攻螺钉*8,螺丝刀*1安装步骤用四颗螺钉将四根支柱固定在电路板上(见下图)正面 背面 按照下图所示位置完成喇叭模块和电路板的连线按照下图所示位置用四颗螺钉将喇叭模块固定在电路板上(注意:喇叭线要藏在喇叭模块和电路板之间的缝隙中)STEP4 安装电路板到车身所需元件电路板*1,车身*1,大头平尾自攻螺钉*4,螺丝刀*1安装步骤按照下图将车身后部穿出的两根电机线和一根电池线分别连在电路板上的相应接口中(注意:电机线和电池线要藏在电路板和车身之间的缝隙中)用四颗螺钉将安装好喇叭模块的电路板固定在车身上(见下图)所需元件车身*1,驱动车轮*2,盘头自攻螺钉*2,螺丝刀*1安装步骤将两个车轮分别插入车身两侧伸出的白色横轴中(见下图)将两颗螺钉分别插入车轮中央的凹槽并用螺丝刀拧紧(见下图)所需元件车身*1,支撑轮*1,沉头螺钉*2,螺丝刀*1安装步骤组装支撑轮(见下图)按照下图用螺钉把支撑轮固定在车头底座(注意:支撑轮朝后,避免遮挡巡线传感器)所需元件碰撞传感器*2,导线*2,车身*1,大头平尾自攻螺钉*4,螺丝刀*1安装步骤将两根导线的一端分别插入碰撞传感器的接口(见下图)分别用两颗螺钉将碰撞传感器固定在车头,并将两根导线的另一端分别插入电路板上的P13和P16接口(见下图)所需元件巡线传感器*1,导线*2,车身*1,大头平尾自攻螺钉*1,螺丝刀*1安装步骤将两根导线的一端分别插入巡线传感器最外侧的两个接口(见下图)用螺钉把巡线传感器固定在车头,并把两根导线的另一端分别插入电路板上的P14和P15接口(见下图)所需元件超声波传感器*1,导线*1,车身*1,支柱*2,大头平尾自攻螺钉*2,螺丝刀*1安装步骤(1)按照下图用导线连接超声波传感器和电路板(注意:超声波传感器的TRIG、ECHO、GND和+5V分别对应电路板上的P1、P2、GND、3V3)(2)将两根支柱顺时针拧入车身正前方(见下图)(3)用两颗螺钉把超声波传感器固定在车身正前方的两根支柱上(见下图)所需元件灯带*2,双面胶*1,车顶*1安装步骤(1)按照下图取适当长度的两段双面胶分别粘在车顶的两侧(2)按照下图将两条灯带分别粘在车顶的双面胶上(注意灯带的正反和摆放方向)所需元件车顶*1,车身*1,旋钮*2安装步骤(1)按照下图将灯带上的导线分别插入到电路板上的P5和P11接口(1)按照下图用两颗旋钮把车顶固定在车身上STEP12 安装Micro:bit所需元件Micro:bit *1,车身*1安装步骤按照下图将Micro:bit插入至电路板上的插槽(注意Micro:bit的正反和方向)恭喜你成功组装了MAX:BOT机器人,开始你的MAX:BOT探索之旅吧!。
5.RobotFans——步进电机驱动模块

1、概述步进电机驱动模块是用来精确驱动双极步进电机的。
当有脉冲输入,步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。
它可以用在3D打印、数控、RobotFans音乐机器人以及精确动作控制等方面。
本模块贴有红色色标,我们需要使用RJ25连接线连接到主控板上带有红色标识的接口。
2、技术规格`●最大驱动电压:12VDC●最大电流:1.35A3、功能特性●兼容4线双极步进电机;●只需要两个端口就可以控制步进和方向;●可调电位器可以调节最大电流输出,改变步进电机扭矩;●具有板上拨码开关支持全,半,1/4,1/8,1/16步进模式;●具有接地短路保护和加载短路保护;●具有反接保护,电源反接不会损坏IC;●模块的白色区域是与金属梁接触的参考区域;●支持Arduino IDE编程,并且提供运行库来简化编程;●支持Mixly图形化编程,适合全年龄用户;●使用RJ25接口连线方便;●模块化安装,兼容乐高系列;图1步进电机驱动模块与RobotFans连接注:驱动板长时间工作,芯片会发热,使用的时候请注意。
有需要的话可以在上面加个散热片,帮助芯片散热杜邦线连接当使用杜邦线连接到Arduino Uno主板时,EN接低电平,RST和SLP接高电平,STP和DIR引脚需要连接到ANALOG(模拟)口(也可以只连接STP、DIR管脚),如下图所示:图2步进电机驱动模块与Arduino UNO连接图注:接杜邦线时,模块上需要焊接排针。
6、原理解析步进电动机是一种将脉冲信号变换成相应的角位移(或线位移)的电磁装置,是一种特殊的电动机。
一般电动机都是连续转动的,而步进电动机则有定位和运转两种基本状态,当有脉冲输入时,步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度本模块主要元件为A4988微步驱动器,可在全、半、1/4、1/8及1/16步进模式时操作双极步进电动机,在具体的使用中我们只要控制STEP和DIR就可以了。
hcsr04超声波模块工作频率

hcsr04超声波模块工作频率
摘要:
1.HCSR04超声波模块简介
2.HCSR04超声波模块的工作原理
3.HCSR04超声波模块的引脚功能
4.HCSR04超声波模块的使用注意事项
正文:
HCSR04超声波模块是一款常用的测距模块,具有高精度、盲区超近、稳定测距等特点。
它的工作电压为DC 5V,工作电流为15ma,工作频率为
40kHz。
最远射程可达4m,最近射程为2cm,测量角度为15度。
HCSR04超声波模块的工作原理如下:首先,给超声波模块接入电源和地,然后给脉冲触发引脚(trig)输入一个长为20us的高电平方波。
输入方波后,模块会自动发射8个40khz的声波,与此同时回波引脚echo端的电平会由0变为1。
当超声波返回被模块接收到时,回波引脚端的电平会由1变为0,此时应停止定时器计数。
定时器记录的时间就是超声波从发射到返回的时间,根据这个时间可以计算出距离。
HCSR04超声波模块的引脚功能如下:VCC接5V电源,GND接地线,TRIG接脉冲触发信号,ECHO接回响信号。
在使用HCSR04超声波模块时,有一些注意事项:
1.确保模块工作电压稳定,避免电压波动影响测量精度。
2.避免模块长时间连续工作,以免过热损坏。
3.确保触发引脚和回响引脚的连接稳定,避免信号干扰。
4.在测量过程中,保持探头清洁,避免灰尘或污垢影响测量结果。
5.探头应垂直于被测物体,避免因角度不准确导致测量误差。
工业机器人技术与应用考试题(含答案)

工业机器人技术与应用考试题(含答案)一、单选题(共106题,每题1分,共106分)1.在光的作用下,电子吸收光子能量从键合状态过渡到自由状态,引起物体电阻率的变化,这种想象称为()。
A、磁电效应B、声光效应C、光生伏特效应D、光电导效应正确答案:D2.光线传感器由检测头、光纤和()组成。
A、光电转换器B、电源模块C、放大器D、适配器正确答案:C3.在何处找到机器人的序列号?()。
A、操作面板B、控制柜铭牌C、驱动控制器D、示教器正确答案:B4.那条指令是延时指令()。
A、WaitDiB、WaitDoC、DiWaitD、WaitTime正确答案:D5.一个完整的工业机器人弧焊系统由机器人系统、焊枪、焊接电源、()焊接变位机等组成。
A、送丝机B、水冷系统C、防护系统D、烟尘净化器正确答案:A6.ABB120机器人5轴同步皮带点检时,更换新皮带的张力范围是()为合格。
A、12.5~14.3NB、18~19.7NC、7.6~8.4ND、5.3`6.1N正确答案:C7.在电容传感器中,若采用调频法测量转换电路,则电路中()。
A、电容和电感均为变量B、电容是变量,电感保持不变C、电感是变量,电容保持不变D、电容和电感均保持不变正确答案:BD摄像头采用电视PAL标准,每帧图像由()场构成。
A、1B、2C、3D、4正确答案:B9.ABB120机器人本体底座处接口不包括()。
A、压缩空气B、SMB电缆C、电机动力电缆D、示教器电缆正确答案:D10.在 ABB 工业机器人中修改工具坐标系参数,选中需要定义的工具坐标系,在“编辑”选项中点击()进行后续设定。
A、更改值B、更改申明C、定义D、重新设置正确答案:A11.液压泵与电机的连接应采用()联轴器,传动轴的同轴度误差应小于0.1mm。
A、挠性B、直连式C、液力D、刚性正确答案:A12.并联谐振式逆变器的换流()电路并联。
A、电容与电阻B、电感与负载C、电容与负载D、电感与电阻正确答案:C13.在输出扫描阶段,将()寄存器中的内容复制到输出接线端子上。
超声波模块使用方法

超声波模块使用方法Ultrasonic modules are widely used in various fields such as distance measurement, object detection, and obstacle avoidance. These modules emit high-frequency sound waves and measure the time it takes for the waves to bounce back to calculate the distance to an object. When using an ultrasonic module, it is important to carefully follow the instructions to ensure accurate and reliable results.超声波模块是在距离测量、物体检测和障碍物避免等各个领域广泛使用的。
这些模块发射高频声波,并测量声波反弹回来所需的时间,以计算到物体的距离。
在使用超声波模块时,重要的是要仔细遵循说明书,以确保准确可靠的结果。
Firstly, it is crucial to understand the wiring and connections of the ultrasonic module. Most ultrasonic modules have four pins - VCC, Trig, Echo, and GND. VCC is the power supply pin, Trig is used to trigger the module to send out ultrasonic waves, Echo receives the ultrasonic waves reflected back from an object, and GND is the ground pin. Ensuring the correct connections are made is essential for the proper functioning of the ultrasonic module.首先,重要的是要了解超声波模块的接线和连接。
机器人学习实验报告

一、实验目的1. 了解机器人的基本组成和工作原理。
2. 掌握机器人编程的基本方法。
3. 学习机器人运动控制和路径规划。
4. 培养动手能力和团队协作精神。
二、实验内容及步骤1. 实验环境本实验使用一款小型移动机器人,配备以下硬件:1个微控制器1个伺服电机1个红外传感器1个超声波传感器1个无线模块1个充电电池软件方面,使用ROS(Robot Operating System)进行机器人编程和控制。
2. 实验步骤(1)机器人组装与调试首先,将机器人各个部件按照说明书进行组装。
组装完成后,进行初步调试,确保机器人可以正常移动和传感器可以正常工作。
(2)机器人编程使用ROS编写机器人控制程序,主要包括以下内容:移动控制:编写控制机器人移动的代码,实现直线移动、转弯、后退等功能。
传感器数据处理:编写代码处理红外传感器和超声波传感器的数据,实现避障功能。
无线通信:编写代码实现机器人之间的无线通信,实现协同工作。
(3)机器人路径规划设计机器人路径规划算法,实现机器人按照指定路径移动。
本实验采用A算法进行路径规划。
(4)机器人实验进行以下实验:直线移动:让机器人按照预设路径进行直线移动。
转弯:让机器人按照预设路径进行转弯。
避障:让机器人遇到障碍物时自动避开。
协同工作:让多台机器人协同完成特定任务。
三、实验结果与分析1. 机器人移动通过编程控制,机器人可以按照预设路径进行直线移动和转弯。
实验结果显示,机器人移动平稳,速度可调。
2. 机器人避障通过红外传感器和超声波传感器,机器人可以检测到周围障碍物。
当检测到障碍物时,机器人会自动调整方向避开障碍物。
实验结果显示,机器人避障效果良好。
3. 机器人路径规划采用A算法进行路径规划,机器人可以按照预设路径移动。
实验结果显示,路径规划效果良好,机器人能够顺利到达目标位置。
4. 机器人协同工作通过无线通信,多台机器人可以协同完成特定任务。
实验结果显示,机器人协同工作效果良好,能够高效完成任务。
工业机器人与智能制造技术考核试卷
B.加工机器人
C.智能测量设备
D.自动化仓库
15.以下哪些是工业机器人执行器的主要类型?()
A.电动执行器
B.气动执行器
C.液压执行器
D.电磁执行器
16.智能制造技术中,以下哪些技术可以用于生产线的设计与仿真?()
A. CAD
B. CAE
C. CAPP
D. CAM
17.以下哪些是工业机器人安全防护措施?()
A.数据采集
B.数据传输
C.数据分析
D.数据存储
(以下为答题纸,请考生将答案填写在答题纸上,勿在此处作答。)
二、多选题(本题共20小题,每小题1.5分,共30分,在每小题给出的四个选项中,至少有一项是符合题目要求的)
1.工业机器人的主要应用领域包括以下哪些?()
A.焊接
B.装配
C.喷涂
D.农业
2.智能制造技术的核心组成部分包括以下哪些?()
4.以下哪种工业机器人适用于搬运、包装等轻负载场合?()
A. SCARA机器人
B.六轴机器人
C.直角坐标机器人
D.圆柱坐标机器人
5.智能制造技术中,哪种设备可以实现高速、高精度加工?()
A.数控机床
B.冲压机
C.注塑机
D.搬运机器人
6.以下哪个是我国工业机器人产业的重要基地?()
A.北京
B.上海
C.深圳
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
1.工业机器人可以完全替代人工进行所有生产活动。()
2.智能制造技术主要依赖于高度自动化的生产线。()
3.在工业机器人编程中,可以随意跳过某些指令而不影响程序执行。()
智能机器人编程与控制考核试卷

2.智能机器人的路径规划通常采用______算法。
3. ROS(Robot Operating System)是一种______操作系统。
4.机器人的控制系统通常包括______、______和______三个部分。
5. PID控制器中的P代表______,I代表______,D代表______。
B.运动控制算法设计
C.语音识别
D.网页制作
2.机器人编程常用的编程语言是?()
A. C++
B. Java
C. Python
D. HTML
3.下列哪种算法通常用于机器人的路径规划?()
A. Dijkstra算法
B. A*算法
C. BFS算法
D. HTTP协议
4.智能机器人控制系统一般不包括以下哪部分?()
A.传感器
B.执行器
C.控制器
D.显示器
5.以下哪种不属于机器人的执行机构?()
A.电机
B.气缸
C.传感器
D.齿轮
6.关于ROS(Robot Operating System),以下哪项描述错误?()
A.是一种机器人操作系统
B.支持分布式计算
C.不支持Python编程
D.可以实现不同功能模块的协同工作
智能机器人编程与控制考核试卷
考生姓名:__________答题日期:__________得分:__________判卷人:__________
一、单项选择题(本题共20小题,每小题1分,共20分,在每小题给出的四个选项中,只有一项是符合题目要求的)
1.以下哪项不是智能机器人编程的主要功能?()
A.传感器数据处理
《3D仿真虚拟机器人培训-基础知识部分》讲义0328

《3D 仿真虚拟机器人教师培训》讲 义广州市教育信息中心(电教馆)二 O一 O 年三月目 录第一章 基础知识部分 (3)第二章 虚拟机器人程序设计初步 (8)第三章 超声波传感器和触碰传感器的使用 (11)第四章 红外传感器和光电传感器的使用 (14)第五章 机器人灭火程序分析 (19)第一章 基础知识部分学习目标了解机器人的概念、机器人的应用、机器人发展与未来,介绍机器人教育进入我国 中小学现状分析、开展实体机器人教育的瓶颈,开展3D仿真虚拟机器人教育的优势等, 认识 3D 仿真虚拟机器人软件的组成,以及机器人场地和机器人模型的结构。
掌握对机 器人场地和机器人模型的导入和新建的方法,掌握如何在 3D 仿真机器人软件中机器人 场地和机器人模型的编辑。
重点和难点1、教学重点:3D仿真虚拟机器人场地和机器人模型的运用。
2、教学难点:3D仿真虚拟机器人场地和机器人模型的编辑。
学习内容一、 机器人的概念与应用展示几组机器人图片,让大家了解机器人,在展示任务的同时提出问题,引导大家 认识我们生活中的各种机器人,归纳出机器人的概念。
图1-1 迎宾机器人 图1-2与机器人对话 图1-3 机器人“乐队”(一)什么是机器人?中国的科学家们把机器人定义为:机器人是一种自动化的机器,而且其具备一些与 人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有 高度灵活性的自动化机器。
(二)机器人的应用领域从工业拓广到 农业、林、牧、渔,甚至进入寻常百姓家。
机器人的种类之多,应 用之广,影响之深,机器人分为军用机器人和民用机器人。
(三)学校开展机器人教育的目的和意义智能机器人融合了机械、电子、传感器、无线通讯、声音识别、图像处理和人工智 能等领域的先进技术。
在中小学开展智能机器人实验活动可以培养学生的动手实践能 力、创新思维能力和团结协作能力,同时也能够适应新课程改革的需要,对提高中小学 生科技素养有着巨大的促进作用。
单收单发超声波模块使用指南自动跟随机器人

单收单发超声波模块使用手册V1.01.参数简介最远接收距离:>5米最短接收距离:<4厘米最大接收角度:>90度数据波动范围:<3毫米模块工作电压:5V模块工作方式:串口模块发送频率:50HZ模块通信波特率:1152002.使用过程发送超声波模块:发送超声波模块只需要上电即可。
发送超声波模块上电后,发送超声波模块上的LED会快闪,此时证明,发送超声波模块已经在正常工作了。
(注:发送超声波模块上面留有了RX TX,这是用来刷超声波固件。
)接收超声波模块:当发送超声波模块通上电之后。
需要将发送超声波模块和接收超声波模块对准,此时接收超声波模块需上的LED 会快闪。
此时证明接收超声波模块已经接收到发送超声波模块发射的超声波。
此时接收超声波模块上接收到的数据即是发送和接收超声波的距离数据。
值得注意的是,2个超声波发射头需要对准,才会通信成功,发送超声波模块只需上电即可工作(发送上的LED闪烁),此时只是证明了发送超声波模块已经成功发射出超声波,但并不能证明接收超声波模块会接收到数据,只有接收到发送超声波模块的声波后,接收超声波模块上的LED闪烁后,才能证明这两者已经通信成功。
接收超声波模块才会有距离数据输出。
3.数据格式当接收超声波已经接收到发送超声波的数据后,接收超声波模块上的LED灯会快速闪烁,会通过串口以50Hz的频率发送出距离数据。
数据格式是:0XA5+两个字节数据(16进制),距离的单位是mm,例如:返回数据是:A500C8,意思就是:200mm。
数据的含义是什么呢?0XA5是帧头,另外2个是数据存储字节。
如何解算:很简单,把2个字节数据移位然后逻辑运算即可。
如下:distance_left=dat_left[1]<<8|dat_left[2];。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
超声波模块
1、概述
超声波模块是一个用来测量距离的电子模块,测量范围是3cm到400cm.。
可以用来帮助小车避开障碍或加入其他有关测距的项目。
本模块接口是黄色色标,说明是单数字接口,需要连接到主板上的黄色标识的接口。
2、技术规格
●工作电压:5V DC
●工作温度:-25~+80℃
●测量角度:30度范围内
●测量范围:3-400cm(误差小于1cm)
●超声波频率:42kHz
●控制方式:单数字口控制
●模块尺寸:56x36x31mm(长x宽x高)
3、功能特性
●具有反接保护,电源反接不会损坏IC;
●模块的白色区域是与金属梁接触的参考区域;
●支持Arduino IDE编程,并且提供运行库来简化编程;
●支持Mixly图形化编程,适合全年龄用户;
●使用RJ25接口连线方便;
●模块化安装,兼容乐高系列;
●配有接头支持绝大多数Arduino系列主控板。
4、引脚定义
超声波模块有三个针脚的接头,每个针脚的功能如下表
●RJ25连接
由于超声波模块接口是黄色色标,当使用RJ25接口时,需要连接到主控板上带有黄色色标的接口。
以RobotFans主控板为例,可以连接到3,4,5,6,7,8号接口,如图
图1超声波模块与Makeblock Orion连接
●杜邦线连接
当使用杜邦线连接到Arduino Uno主板时,模块SIG引脚需要连接到DIGITAL(数字)口,如下图所示:
图2超声波模块与Arduino UNO连接
注:接杜邦线时,模块上需要焊接排针。
6、原理解析
超声波模块中,超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍
物的距离s,即:s=340m/s×t/2。