吉林大学机械原理历年试卷1
机械原理考研真题试卷
机械原理考研真题试卷一、选择题(每题2分,共20分)1. 机械原理中,机构的基本运动单元是:A. 杠杆B. 滑块C. 铰链D. 轮盘2. 以下哪个不是平面四杆机构的基本类型?A. 双曲柄机构B. 双摇杆机构C. 曲柄摇杆机构D. 曲柄滑块机构3. 机械系统的动态响应分析中,通常使用哪种数学工具?A. 微分方程B. 积分方程C. 代数方程D. 几何方程...二、填空题(每空1分,共10分)1. 机械原理中,______是指机构在运动过程中,某些构件的相对位置和方向保持不变的特性。
2. 机械效率是指机械输出功率与______的比值。
3. 在平面连杆机构中,若最短杆长度为l1,最长杆长度为l2,则最短杆与最长杆长度之和应满足______。
...三、简答题(每题10分,共20分)1. 简述机械原理中运动副的概念及其分类。
2. 解释什么是机构的自由度,并举例说明如何计算一个机构的自由度。
...四、计算题(每题15分,共30分)1. 给定一个平面四杆机构,已知最短杆长度为100mm,最长杆长度为300mm,求该机构的自由度。
2. 假设有一个机械系统,其动态方程为m*x''(t) + c*x'(t) + k*x(t) = F(t),其中m、c、k为常数,F(t)为外力。
若初始条件为x(0) = 0,x'(0) = 0,求该系统在F(t) = 10*sin(ωt)作用下的响应。
...五、论述题(共20分)1. 论述机械原理在现代机械设计中的应用及其重要性。
结束语机械原理是一门综合性很强的学科,它不仅要求学生掌握理论知识,还要求能够将这些知识应用到实际问题的解决中。
希望本试卷能够帮助考生更好地复习和准备考试。
机械原理历年考试试卷真题集锦 后附答案 掌握必过
机械原理考试真题集锦后附答案一.判断题(正确的填写“T”,错误的填写“F”)(20分)1、根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。
(F )2、对心的曲柄滑块机构,其行程速比系数K 一定等于一。
(T )3、在平面机构中,一个高副引入二个约束。
(F )4、在直动从动件盘形凸轮机构中,若从动件运动规律不变,增大基圆半径,则压力角将减小(T )5、在较链四杆机构中,只要满足杆长和条件,则该机构一定有曲柄存在。
(F )6、滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。
(T )7、在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。
(T )8、任何机构的从动件系统的自由度都等于零。
(T )9、一对直齿轮啮合传动,模数越大,重合度也越大。
(F )10、在较链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。
(F )二、填空题。
(10分)1、机器周期性速度波动采用(飞轮)调节,非周期性速度波动采用(调速器)调节。
2、对心曲柄滑块机构的极位夹角等于(0 )所以(没有)急回特性。
3、渐开线直齿圆柱齿轮的连续传动条件是(重合度大于或等于1 )o4、用标准齿条形刀具加工标准齿轮产生根切的原因是(齿条形刀具齿顶线超过极限啮合点N1 )o5、三角螺纹比矩形螺纹摩擦(大),故三角螺纹多应用(联接),矩形螺纹多用于(传递运动和动力)o三、选择题(10分)1、齿轮渐开线在()上的压力角最小。
A )齿根圆;B)齿顶圆;C)分度圆;D)基圆。
2、静平衡的转子(①)是动平衡的。
动平衡的转子(②)是静平衡的。
①A)一定;B)不一定;C)一定不。
②A)一定;B)不一定:C)一定不。
3、满足正确啮合传动的一对直齿圆柱齿轮,当传动比不等于一时,他们的渐开线齿形是()o A)相同的;B)不相同的。
4、对于转速很高的凸轮机构,为了减小冲击和振动,从动件运动规律最好采用()的运动规律。
机械原理考研试题及答案
机械原理考研试题及答案一、选择题(每题2分,共10分)1. 在机械原理中,机构的自由度是指机构的()。
A. 运动的独立参数数目B. 构件数目C. 运动轨迹的数量D. 运动的复杂程度答案:A2. 铰链四杆机构中,若最短杆的长度为其他三杆长度之和的一半,则该机构为()。
A. 双曲柄机构B. 双摇杆机构C. 曲柄摇杆机构D. 摇杆曲柄机构答案:A3. 以下哪个不是平面四杆机构的类型?()A. 曲柄摇杆机构B. 双摇杆机构C. 双曲柄机构D. 曲柄滑块机构答案:D4. 机械原理中,机构的传动角是指()。
A. 从动件与主动件之间的夹角B. 传动轴与从动轴之间的夹角C. 从动件与传动轴之间的夹角D. 主动件与传动轴之间的夹角答案:C5. 曲柄滑块机构中,若滑块的行程为曲柄长度的两倍,则该机构为()。
A. 快速机构B. 慢速机构C. 等速机构D. 非等速机构答案:B二、填空题(每题2分,共10分)1. 机构中,若两个运动副的轴线在同一平面内,且两轴线相交,则该运动副为______。
答案:铰链副2. 四杆机构中,若最短杆的长度为其他三杆长度之和,则该机构为______机构。
答案:双曲柄3. 在机械原理中,机构的死点位置是指______。
答案:曲柄与连杆共线的位置4. 机构的自由度计算公式为______。
答案:F = 3(n-1) - 2p5. 曲柄滑块机构中,若滑块的行程为曲柄长度的一半,则该机构为______机构。
答案:等速三、简答题(每题5分,共20分)1. 简述机构自由度的概念及其计算方法。
答案:机构自由度是指机构在空间中可以独立运动的参数数目。
计算方法为F = 3(n-1) - 2p,其中n为机构的构件数,p为机构的低副数。
2. 解释曲柄滑块机构的工作原理。
答案:曲柄滑块机构是一种将旋转运动转换为直线运动的机构。
曲柄通过连杆驱动滑块在导轨上做往复直线运动。
3. 描述四杆机构的类型及其特点。
答案:四杆机构有曲柄摇杆机构、双曲柄机构、双摇杆机构。
机械原理练习题
1.简答题(1)(吉林大学年考研试题)何为运动副?按接触形式分有几种?其自由度、约束数如何?(4分)(2)(东华大学)年考研试题)机构中的虚约束一般出现在哪些场合?既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束?(8分)(3)(浙江大学加年考研试题)平面机构自由度的计算公式是什么?(3分)(4)(浙江大学则1年考研试题)机构具有确定运动的条件是什么? (3分)(5)(浙江大学2001年)考研试题)何为复合铰链,局部自由度和虚约束?(3分)(6)(西北工业大学)考研试题)何谓机构运动简图?机构运动简图与实际机构有哪些相同之处.有哪些不同之处?(6分)(7)(哈尔演王业大学Ig98年考研试题)在图示压床机构中,构件1为原动件。
为使压头GH均匀下压而不倾斜,试问机构各构件的尺寸应满足什么条件?为什么?其中构件cF起什么作用?(4分)(8)[上海交通大学加斗考研试题)什么是虚约束?其存在条件如何?既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束?(5分)2.填空题(1)(华东理工大学考研试题)机构具有确定运动的条件是:一一。
(3分)(2)(华东理工大学年考研试题)如果拆分杆组时,n=6,则低副数一定是------个-。
(3分)(3)(浙江大学考研试题)平面机构中若引入一个高副将带人一个约束,而引入一个低副将引入一个约束。
(1分)(4)(西北工业大学洲年考研试题)机构中,原动件指的是---------机架指的是——,从动件指的是——————————。
(5)(西北工业大学洲年考研试题)运动副指的是一通过面接触而构成的运动副称为——;两构件通过点、线接触而构成的运动剧称为——。
3.选择题(1)(大连理工大学加年考研试题)运动镀的自由度数多于原动件数目,那么,该运动链———。
限分)A.不是机构 B.运动不相容 c.运动不确定(2)(吉林大学加年考研试通)莱平面机构共有5个低副、1个高副,机构的自由度为1,该机构具有——个活动构件。
吉林大学《机械设计基础》期末考试学习资料(一)
吉大《机械设计基础》(一)
1.构件、部件与零件的区别
构件是机械的运动单元,构件可以是由单一的零件,也可以是由若干零件组成;从制造角度看,若干个零件组成了机构,若干个机构组成了机器,因此零件是机械的制造单元,也是机器的基本组成要素;部件是由一组协同工作的零件组成的独立制造装配的组合件,它是机械中的装配单元,如减速器、离合器等。
2. 何为平面机构?
平面机构:组成机构的所有构件都在同一平面内或几个互相平行的平面内运动,这种机构称为平面机构。
3. 试述复合铰链、局部自由度和虚约束的含义?为什么在实际机构中局部自由度和虚约束常会出现?
复合铰链:两个以上的构件同时在一处用回转副相联接时就构成了复合铰链。
局部自由度:在机构中,有些构件所产生的运动并不影响其他构件的运动,这种构件运动的自由度称为局部自由度。
虚约束:在运动副引入的约束中,有些约束对机构自由度的影响是重复的,对机构的运动不起限制作用,这种重复的约束称为虚约束。
局部自由度的使用是为了减小高副磨损而将滑动摩擦变成滚动摩擦。
虚约束的引入可以增加构件的刚性,改善构件的受力情况,提高工作性能,提高稳定性等。
4. 计算图示连杆机构的自由度,为保证该机构具有确定的运动,需要几个原动件?为什么?
解:机构在k 点处有局部自由度。
1129===h l P ,P ,n ,则211229323=-⨯-⨯=--=h l P P n F 。
若该机构要具有确定的运动,
则需要两个原动件,因为机构具有确定运动的条件为:机构的自由度数等于机构原动件的数目,该机构的自由度为2,所以应具有两个原动件。
H。
机械原理考试试题及答案经典题库
试题1一、选择题(每空2分,共10分)1、平面机构中,从动件的运动规律取决于 D 。
A、从动件的尺寸B、机构组成情况C、原动件运动规律D、原动件运动规律和机构的组成情况2、一铰链四杆机构各杆长度分别为30mm ,60mm,80mm,100mm,当以30mm的杆为机架时,则该机构为 A 机构。
A、双摇杆B、双曲柄C、曲柄摇杆D、不能构成四杆机构3、凸轮机构中,当推杆运动规律采用 C 时,既无柔性冲击也无刚性冲击。
A、一次多项式运动规律B、二次多项式运动规律C、正弦加速运动规律D、余弦加速运动规律4、平面机构的平衡问题中,对“动不平衡”描述正确的是 B 。
A、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B、动不平衡只有在转子运转的情况下才能表现出来C、静不平衡针对轴尺寸较小的转子(转子轴向宽度b与其直径D之比b/D<0.2)D、使动不平衡转子的质心与回转轴心重合可实现平衡5、渐开线齿轮齿廓形状决定于 D 。
A、模数B、分度圆上压力角C、齿数D、前3项二、填空题(每空2分,共20分)1、两构件通过面接触而构成的运动副称为低副。
2、作相对运动的三个构件的三个瞬心必在同一条直线上。
3、转动副的自锁条件是驱动力臂≤摩擦圆半径。
4、斜齿轮传动与直齿轮传动比较的主要优点:啮合性能好,重合度大,结构紧凑。
5、在周转轮系中,根据其自由度的数目进行分类:若其自由度为2,则称为差动轮系,若其自由度为1,则称其为行星轮系。
6、装有行星轮的构件称为行星架(转臂或系杆)。
7、棘轮机构的典型结构中的组成有:摇杆、棘爪、棘轮等。
三、简答题(15分)1、什么是构件?答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的单位体。
2、 何谓四杆机构的“死点”? 答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动,机构的这种传动角为零的位置称为死点。
机械原理历年试题汇总与答案解析
机械原理历年试卷汇总及答案第2章 机构的结构分析一、填空题:1、机构可能出现的独立运动数目称为机构的__________。
2、在平面机构中若引入H P 个高副将引入 个约束,而引入L P 个低副将引入个约束,则活动构件数n 、约束数与机构自由度F 的关系是 。
3、机构具有确定运动的条件是: ;若机构自由度F>0,而原动件数<F ,则构件间的运动是 ;若机构自由度F>0,而 原动件数>F ,则各构件之间 。
4、根据运动副中两构件的接触形式不同,运动副分为__________、__________。
5、根据机构的组成原理,任何机构都可以看作是由若干个__________依次联接到原动件和机架上所组成的。
6、在平面机构中,具有两个约束的运副是__副,具有一个约束的运动副是__副。
7、两构件之间为 接触的运动副称为低副,引入一个低副将带入 个约束。
二、选择题1、当机构中原动件数目 机构自由度数目时,该机构具有确定的相对运动。
A.小于 B.等于 C.大于 D.大于或等于2、某机构为Ⅲ级机构,那么该机构应满足的充分必要条件是 。
A.含有一个原动件组;B.至少含有一个基本杆组;C.至少含有一个Ⅱ级杆组;D.至少含有一个最高级别为Ⅲ级的杆组。
3、每两个构件之间的这种可动联接,称为__________。
A.运动副;B.移动副;C. 转动副;D.高副。
4、基本杆组是自由度等于的运动链。
A.0;B.1;C.原动件数。
5、在图示4个分图中,图是Ⅲ级杆组,其余都是个Ⅱ级杆组的组合。
6、图示机构中有_______虚约束。
A 1个B 2个C 3个D 没有7、图示机构要有确定的运动,需要有_______原动件。
A 1个B 2个C 3个D 没有三、简答题:1、机构组成原理是什么?2、何谓运动副?按接触形式分有哪几种?其自由度、约束数如何?3、机构中的虚约束一般出现在哪些场合?既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束? 四、分析、计算题1、计算下图所示机构的自由度,若有复合铰链、局部自由度、虚约束,请指出。
吉林大学机械原理历年试卷1
模拟试题一(机械原理A )一、判断题(10分)[对者画√,错者画 ⨯ ]1、在刚性转子中,满足静平条件的转子一定满足动平衡条件。
( )2、四杆机构中,当行程速比系数K>0时一定有急回特性。
( )3、平面低副具有两个自由度,一个约束。
( )4、一对渐开线直齿圆柱齿轮当α1≠α2,m 1≠m 2时,该对齿轮有时也能正确啮合。
( )5、用飞轮调节周期性速度波动,永远不能达到匀速转动。
( )6、等效力矩是根据动能相等的原理求得的。
( )7、在四杆机构中,当最短杆长度与最长杆长度之和大于其余两杆长度之和时,固定最短杆的邻边,该机构为曲柄摇杆机构。
( )8、平底摆动从动件凸轮机构的压力角永远为零。
( ) 9、当机械效率小于1大于0时,机构即发生自锁。
( ) 10、一对外啮合斜齿圆柱齿轮传动,两轮螺旋角旋向必一致。
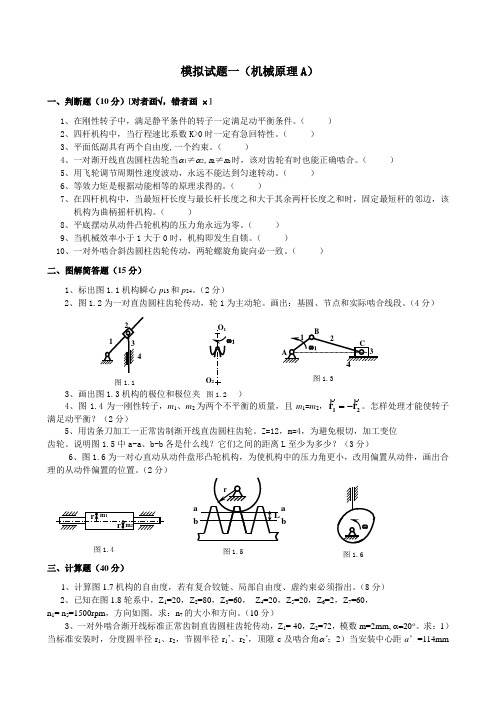
( ) 二、图解简答题(15分)1、标出图1.1机构瞬心p 13和p 24。
(2分)2、图1.2为一对直齿圆柱齿轮传动,轮1为主动轮。
画出:基圆、节点和实际啮合线段。
(4分)34、图1.4为一刚性转子,m 1、m 2m 1=m 2,21r r-=。
怎样处理才能使转子满足动平衡?(2分)5、用齿条刀加工一正常齿制渐开线直齿圆柱齿轮。
Z=12,m=4,为避免根切,加工变位 齿轮。
说明图1.5中a-a 、b-b 各是什么线?它们之间的距离L 至少为多少?(3分)6、图1.6为一对心直动从动件盘形凸轮机构,为使机构中的压力角更小,改用偏置从动件,画出合理的从动件偏置的位置。
(2分)三、计算题(40分)1、计算图1.7机构的自由度,若有复合铰链、局部自由度、虚约束必须指出。
(8分)2、已知在图1.8轮系中,Z 1=20,Z 2=80,Z 3=60, Z 4=20,Z 5=20,Z 6=2,Z 7=60, n 1= n 5=1500rpm ,方向如图。
求:n 7的大小和方向。
(10分)3、一对外啮合渐开线标准正常齿制直齿圆柱齿轮传动,Z 1= 40,Z 2=72,模数m=2mm, α=20ο。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模拟试题一(机械原理A )
一、判断题(10分)[对者画√,错者画 ⨯ ]
1、在刚性转子中,满足静平条件的转子一定满足动平衡条件。
( )
2、四杆机构中,当行程速比系数K>0时一定有急回特性。
( )
3、平面低副具有两个自由度,一个约束。
( )
4、一对渐开线直齿圆柱齿轮当α1≠α2,m 1≠m 2时,该对齿轮有时也能正确啮合。
( )
5、用飞轮调节周期性速度波动,永远不能达到匀速转动。
( )
6、等效力矩是根据动能相等的原理求得的。
( )
7、在四杆机构中,当最短杆长度与最长杆长度之和大于其余两杆长度之和时,固定最短杆的邻边,该
机构为曲柄摇杆机构。
( )
8、平底摆动从动件凸轮机构的压力角永远为零。
( ) 9、当机械效率小于1大于0时,机构即发生自锁。
( ) 10、一对外啮合斜齿圆柱齿轮传动,两轮螺旋角旋向必一致。
( ) 二、图解简答题(15分)
1、标出图1.1机构瞬心p 13和p 24。
(2分)
2、图1.2为一对直齿圆柱齿轮传动,轮1为主动轮。
画出:基圆、节点和实际啮合线段。
(4分)
3
4、图1.4为一刚性转子,m 1、m 2m 1=m 2,21r r
-=。
怎样处理才能使转子满足动平衡?(2分)
5、用齿条刀加工一正常齿制渐开线直齿圆柱齿轮。
Z=12,m=4,为避免根切,加工变位 齿轮。
说明图
1.5中a-a 、b-b 各是什么线?它们之间的距离L 至少为多少?(3分)
6、图1.6为一对心直动从动件盘形凸轮机构,为使机构中的压力角更小,改用偏置从动件,画出合理的从动件偏置的位置。
(2分)
三、计算题(40分)
1、计算图1.7机构的自由度,若有复合铰链、局部自由度、虚约束必须指出。
(8分)
2、已知在图1.8轮系中,Z 1=20,Z 2=80,Z 3=60, Z 4=20,Z 5=20,Z 6=2,Z 7=60, n 1= n 5=1500rpm ,方向如图。
求:n 7的大小和方向。
(10
分)
3、一对外啮合渐开线标准正常齿制直齿圆柱齿轮传动,Z 1= 40,Z 2=72,模数m=2mm, α=20ο。
求:1)当标准安装时,分度圆半径r 1、r 2,节圆半径r 1’、r 2’
,顶隙c 及啮合角α’;2)当安装中心距a ’=114mm
图1.4
a b 4
图1.3
时,求出以上各值;3)当安装中心距a ’=112mm 时,采用等移距齿轮传动,齿轮1、2各应采用什么变位?两轮的变位系数有何特点?4)当安装中心距a ’=115mm 时,为保证无侧隙啮合,改用一对标准斜齿轮传动,αn =20ο,m n =2mm
、β各为多少?(12分)
4、机器主轴在稳定运动循环中,主轴的等效阻力矩Mr 曲线如图1.9所示,等效驱动力矩Md 为常数。
测得最大盈亏功ΔWmax=270π(Nm ),平均角速度ωm =90(1/s ),不均匀系数δ=0.05。
求:1)装在主轴上的飞轮转动惯量J F =?2)主轴的ωmax =?其对应转轴的何位置?3)等效驱动力矩Md=?等效阻力矩Mrmax=?(10分)
五、图解题(35分)
1、已知图1.10凸轮机构,在图上标出:1)基圆半径r o ;2)图示位置从动件位移s 1和凸轮转角δ; 3)当凸轮上D 点与滚子接触时,从动件位移s 2和该位置的压力角α 。
(10分)
2、已知图1.11机构的位置、尺寸,构件1以ω1匀速转动。
用矢量方程图解法求构件3的速度v 3。
(7分 )
3、已知图1.12双滑块机构的位置和尺寸,摩擦圆半径ρ、摩擦角ϕ均为已知。
在图上画出各构件的总反力方向和作用线,并写出各构件的力平衡方程。
(10分)
4、设计一夹紧机构(四杆机构)。
已知:连杆l BC 的杆长,它的两个位置如图1.13所示。
要求到达夹紧位置B 2C 2时,机构处于死点位置,且摇杆C 2D 垂直于B 1C 1。
试设计满足上述两位置的四杆机构。
(图中比例尺为μl =0.001m/mm )(8分)
图1.10
图1.9
M 2
图1.13
图1.11
v 34 图1.12
模拟试题一(机械原理A )答案
一、1.×;2.×;3.×;4.√;5.√;6.×;7.×;8.×;9.×;10.×。
二、1、
、
4、 5、 6、
三、1、n =8,P l =11,P h =1,F =1
2、定:6-7,1-2,周:4-6-5-3
n 1=n 5,n 2=n 3,n 7=3.125(逆)
3、1)r 1′=r 1=40mm ,r 2′=r 2=72mm ,c=0.5 mm ,α′=α=20°
2)a =112mm ,由a cos α=a ′cos α′得α′=22.6°,
r 1=40mm ,r 2=72mm , r 1′=40.71mm ,r 2′=73.29mm ,c=2.5 mm 3)齿轮1正变位,齿轮2负变位,x 1+x 2=0,且x 1>0,x 2<0 4)β=13.12° 4、1)J F =2.094(kg ·m 2); 2)ϕ=0或2π ; 3)M d =240,M rmax =960 。
3
565636
35Z Z n n n n i -=--= 677667Z Z n n i ==
1
22112Z Z n n i -==
图1.1题 2 图1.2题 如图1.3题所示C ’和C ”分别是机构中
滑块的左右极限位置,极位夹角θ = 0ο。
图1.3题
a b
()m m h m x L a
18.1 4171217 *
min =⨯-==图1.4题 图1.5题
四、1、图解如图1.10题所示. 2、解:
3、
4、解:根据题意图解如下图1.13题所示。
AB 1C 1D 即为所求机构的第一位置。
l AB =AB 1·μl l CD =C 1D ·μl
l AD =AD ·μl
()向左AB l v v AB 1B B 1
2⊥==ω方向如图,取导路水平方向:??大小:V 3B 3v B B B B pb v v p // v v v 32
323μμ==∨∨+=
034323=++R R Q
构件:014121=++R R P
构件:0
R R 3212=+ 2构件: 解:此题中2构件是二力构件,该构件受压。
各构件受力图
如右图1.12题,各构件受力平衡方程如下:
图
1.1021R 23
P p 1,b b
图1.11题
2C。