任务1:RobotArt快速入门
机器人入门简易操作培训

机器人入门简易操作培训
本文旨在为初学者介绍机器人的基本操作,以及相关知识和技术,为
其解决机器人操作过程中的问题提供指导。
一、机器人的基本知识
1、机器人的结构:机器人由三个重要部分组成:机械结构、控制系
统和传感器系统,机械结构提供机器人的形态、大小,控制系统用来控制
机器人,传感器系统用来收集当前环境的信息。
2、机器人的动作:机器人的运动机构由电机和伺服控制器构成,控
制器是机器人的核心,用于控制、程序、遥控等,它们通过接受视觉传感器、激光传感器等传感器信号来实现机器人的运动控制。
二、机器人的基本操作
1、准备工作:确认机器人使用环境,检查机器人组件,安装程序,
连接传感器,检查控制电源,搭建机器人底层硬件。
2、建立模型:根据机器人的结构和运动特性,使用编程工具建立模型,完成对关节的编程,模型是机器人在实际程序控制时的基础。
3、控制程序:设计可以实现机器人运动功能的程序,包括移动函数、定位函数、抓取函数等,程序控制是实现机器人应用的基础。
4、实际操作:以上步骤完成后,机器人就可以实际运行起来,开始
实现指定的任务。
ROBOT操作入门

ROBOT操作入门ROBOT操作入门简介ROBOT是一种用于自动化测试的开源工具,它基于Python编写,可以用于自动化测试过程中的任务执行、结果验证、错误处理等。
ROBOT拥有简洁的语法和强大的扩展性,使得它成为软件测试工程师喜爱的工具之一。
本文将介绍ROBOT的基本操作入门,帮助读者快速上手ROBOT自动化测试。
安装ROBOT基于Python,因此在开始之前,需要确保已经正确安装了Python。
可以通过以下命令检查Python是否已经安装:```python --version```如果Python版本大于3,可以直接安装ROBOT:```pip install robotframework```编写测试用例ROBOT的测试用例以文本文件的形式组织,通常以`.robot`为扩展名。
以下是一个简单的测试用例示例:```SettingsLibrary SeleniumLibraryTest CasesOpen BrowserOpen Browser ChromeVerify TitleTitle Should Be Example DomnClose BrowserClose Browser```测试用例由`Settings`、`Test Cases`等部分组成。
`Library`关键字用于导入所需的库,例如本例中导入了`SeleniumLibrary`库用于进行浏览器操作。
`Test Cases`中包含具体的测试用例步骤。
运行测试用例运行ROBOT测试用例可以使用以下命令:```robot testcase.robot```其中`testcase.robot`是要运行的测试用例文件名。
运行结果将会显示在终端上,并且会相应的日志文件和报告文件。
关键字ROBOT的关键字是测试用例中的基本操作单元。
ROBOT提供了许多内置关键字,例如用于浏览器操作的`Open Browser`和`Close Browser`,用于验证结果的`Title Should Be`等。
ROBOT操作入门

ROBOT操作入门ROBOT操作入门1. 简介ROBOT(Remote Open Bionics Operating System)是一种远程操作的操作系统。
它提供了丰富的功能和灵活的操作方式,使用户能够轻松地控制和操作。
本文档将介绍ROBOT的基本操作入门,帮助读者快速上手。
2. 安装ROBOT要开始使用ROBOT,需要将其安装在您的操作系统上。
以下是安装ROBOT的步骤:1. ROBOT安装包:您可以从ROBOT官方网站最新的ROBOT安装包。
2. 解压安装包:将的安装包解压到您选择的目标文件夹中。
3. 配置环境变量:打开终端或命令提示符,将ROBOT安装路径添加到您的系统环境变量中。
完成上述步骤后,ROBOT就已经成功安装在您的系统中了。
3. 连接ROBOT在开始操作ROBOT之前,您需要先将ROBOT与您的设备进行连接。
以下是连接ROBOT的步骤:1. 打开ROBOT控制面板:在您的设备上启动ROBOT控制面板。
2. 选择连接方式:ROBOT支持多种连接方式,包括USB连接和Wi-Fi连接。
根据您的实际情况选择合适的连接方式。
3. 输入连接信息:根据选择的连接方式,输入相应的连接信息,如IP地质、端口号等。
完成上述步骤后,ROBOT就会与您的设备成功连接。
4. 控制ROBOTROBOT提供了多种方式来控制的运动和操作。
以下是一些常用的控制方式:4.1. 通过控制面板控制ROBOT的控制面板提供了直观的可视化界面,可以通过按钮、拖动滑块等方式来控制的动作。
您可以根据的实际情况选择相应的动作和控制方式。
4.2. 通过命令行控制ROBOT还支持通过命令行来控制。
您可以使用命令行工具,发送指令给ROBOT控制系统,实现的运动和操作。
以下是一些常用的命令行指令:- `robot.move(forward)`: 使向前移动。
- `robot.move(backward)`: 使向后移动。
- `robot.turn(left)`: 使向左转向。
机器人编程学习计划
机器人编程学习计划第一部分:入门基础对于初学者来说,了解机器人编程的基础知识是至关重要的。
在入门阶段,学习者需要掌握一些基本概念和技能,才能为更高级的编程工作奠定基础。
1. 学习编程语言在机器人编程中,常用的编程语言包括Python、C++、Java等。
初学者可以通过在线教程、视频教程或者书籍学习基本的编程语法和逻辑结构。
建议选择一门比较简单易学的语言作为入门语言,比如Python。
2. 了解机器人基础知识学习者需要了解机器人的基本构造和工作原理,包括传感器、执行器、控制系统等方面的知识。
可以通过阅读相关书籍或者参加线下培训课程来学习机器人基础知识。
3. 熟悉机器人平台针对不同的机器人,有不同的编程平台和开发工具。
初学者可以选择一个比较流行的机器人平台,比如ROS(Robot Operating System),然后熟悉其基本操作和开发流程。
第二部分:进阶学习在掌握了基础知识之后,学习者可以开始深入学习机器人编程的一些高级主题,如机器人感知、运动控制、路径规划等方面的知识。
1. 学习机器人感知机器人感知是机器人能够感知周围环境的能力,包括摄像头、激光雷达、超声波传感器等。
学习者需要了解不同类型的传感器和它们的工作原理,以及如何在编程中利用这些传感器来帮助机器人感知周围环境。
2. 学习运动控制机器人的运动控制是指机器人如何通过执行器来实现运动。
学习者需要了解不同类型的执行器,如电机、液压缸等,以及如何编写控制程序来实现精确的运动控制。
3. 学习路径规划路径规划是指机器人如何规划最优的运动路径,以实现特定的任务。
学习者需要了解不同的路径规划算法,如A*算法、D*算法等,以及如何在编程中实现这些算法来帮助机器人规划运动路径。
第三部分:实践项目在学习了基础知识和进阶知识之后,学习者可以通过实践项目来巩固所学知识,提高实际操作能力。
1. 自主设计实验项目学习者可以根据自己的兴趣和所学知识,设计和开发一个小型的机器人项目,如避障小车、自动扫地机器人等。
Robot 简易快速入门

BWD key(键):使用该键从后向前地运行程序。
FWD key(键):使用该键从前至后地运行程序。
HOLD key(键):使用该键停止机器人。
Program keys(程序键):使用这些键选择菜单项。
功能健:常常用到第一项
Robot速度调节方式有以下变化
建立程序名
Robot动作指令
Robot改变原有动作轨迹
常用的调程序小指令通常是前面三项
焊接参数的认识,了解!
T P界面解释:
Status Inicators(状态指示灯):指示系统状态。
ON/OFF Switch(开关):与DEADMAN开关一起启动或禁止机器人运动。
SATUS key(键):使用该键显示状态屏幕。
MOVE MENU key(键):使用该键来显示运动菜单屏幕。
MAN FCTNS key(键):使用该键来显示手动功能屏幕。
Jog Speed keys(键):使用这些键来调节机器人的手动操作速度。
COORD key(坐标系键):使用该键来选择手动操作坐标系。
PREV:显示上一屏幕。
SHIFT key(键):与其它键一起执行特定功能。
MENUS key(键):使用该键显示屏幕菜单。
Cursor keys(光标键):使用这些键移动光标。
STEP key(键):使用这个键在单步执行和循环执行之间切换。
RESET key(键):使用这个键清除告警。
BACK SPACE key(键)::使用这个键清楚):使用这个键选择它所代表的项。
ENTER key(键):使用该键输入数值或从菜单选择某个项。
POSN key(键):使用该键显示位置数据。
C-01-O-A-任务一RobotArt离线编程软件应用——环境搭建-课件
离线编程的主要流程——环境搭建
4.校准TCP
③弹出设置TCP的界面,将实际测量得到的 TCP的坐标值填入到对应的坐标中,如图所 示,再单击“确定”。这样就校准了软件中 的TCP位置。
离线编程的主要流程——环境搭建
5.工件校准
在菜单栏中选择“工件 校准”图标。
弹出如图所示的工件校 准界面。
首先指定第一点,单击界面中 第一点的“指定”,然后在零件 上单击指定的点,这样在工件 校准界面设计环境的第一点中
离线编程的主要流程——环境搭建
1.导入机器人
③选择好需要的机器人模型后,单击插 入机器人模型,机器人就会被导入到软 件中,如图所示导入ABB-IRB 120机器 人。
离线编程的主要流程——环境搭建
2.导入工具
在菜单栏中点击导入 工具按钮。
在弹出的位置文件夹 中,选择所需要的工
具,单击打开。
工具就会被导入到软 件中,并且自动装配 在机器人的法兰环境搭建
6. 保存工程
①将搭建好的离线编程进行保存,单击菜单栏中“保存” 按钮。
②弹出另存为界面,输入文件名,保存为(写科 字.robx),然后单击“保存”如图所示。这样后续修改 可以直接打开。
总结
通过学习,掌握离线编程的基本操作流程;掌握导入机器人、导入工 件和导入工具的方法;掌握TCP校准和工件校准的流程。
整 • 插入过渡点
仿真
后置
• 生成代码 • 真机运行
离线编程的主要流程——环境搭建
1.导入机器人
①点击菜单栏中点击“选择机器人”按钮。
②在弹出的界面中进行机器人模型的选择。
选择机器人型号后,在界面右边预览中会 显示出机器人模型。
如果切换到轴范围,会显示出所选择机器 人的六个轴的运动范围。
机器人实训学习手册

机器人实训学习手册第一章机器人基础知识一、机器人简介机器人是指能够自动执行各种任务的机械设备,具备感知、判断、决策和执行等能力。
机器人学是一门研究机器人的学科,它涉及机械工程、电子工程、计算机科学等多个学科的知识。
二、机器人分类根据应用领域的不同,机器人可以分为工业机器人、服务机器人、军事机器人等。
工业机器人主要用于生产线上的自动化生产,服务机器人主要用于提供各类服务,军事机器人则用于军事作战。
三、机器人结构机器人一般由机械结构、电子控制、感知系统和决策执行系统四部分组成。
机械结构包括机械臂、关节和传动装置等;电子控制系统负责对机器人的运动和功能进行控制;感知系统用于机器人的环境感知;决策执行系统用于机器人的决策和执行任务。
四、机器人编程机器人编程是指为机器人设计程序,使其能够完成特定的任务。
常见的机器人编程方式有图形化编程和文本化编程两种。
图形化编程通过拖拽图像化模块来实现,适合初学者;文本化编程则需要编写代码,对于有一定编程基础的人更为适用。
五、机器人实训平台机器人实训平台是学习机器人的重要工具,它提供了仿真环境和实际操作环境,使学习者可以在虚拟场景中进行编程练习,并在实际环境中操作机器人进行实践。
常见的机器人实训平台有VEX、LEGO Mindstorms等。
第二章机器人实训步骤一、了解机器人在进行机器人实训之前,首先要对机器人进行全面了解,包括机器人的基本知识、结构、工作原理等。
二、学习机器人编程掌握机器人编程是进行机器人实训的关键。
可以通过阅读相关书籍、参加培训班或在线课程等方式学习机器人编程。
三、选择实践平台根据自己的实际情况和需求,选择适合自己的机器人实践平台。
可以根据实践平台的特点和功能进行比较、评估,选择最适合自己的平台。
四、进行实际操作在掌握机器人编程基础之后,可以通过实际操作来进行机器人实训。
在实践过程中,可以逐步提升难度,挑战自己的编程能力和操作技巧。
五、反思总结在机器人实训结束后,应对整个过程进行反思总结。
任务1:RobotArt快速入门
RobotArt快速入门RobotArt是神马东东?有什么神奇的功能?在这我们先通过一个涂胶案例,让您5分钟了解RobotArt,一站式解决方案,实现机器人代替人类的工作,接下来我们就看一下下。
怎么个操作步骤。
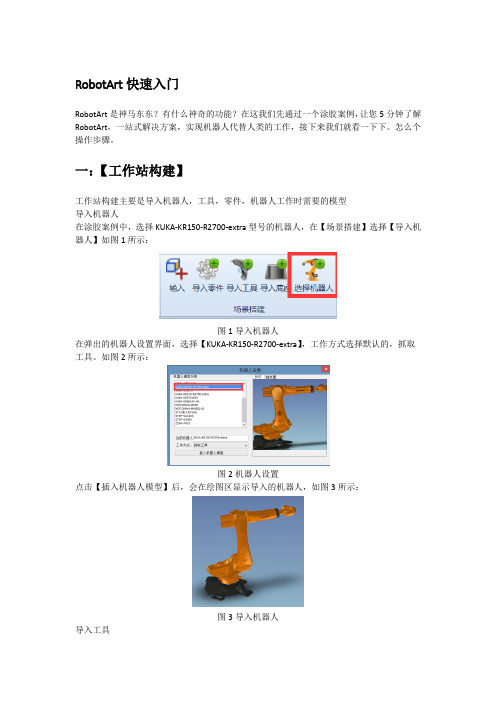
一:【工作站构建】工作站构建主要是导入机器人,工具,零件,机器人工作时需要的模型导入机器人在涂胶案例中,选择KUKA-KR150-R2700-extra型号的机器人,在【场景搭建】选择【导入机器人】如图1所示:图1导入机器人在弹出的机器人设置界面,选择【KUKA-KR150-R2700-extra】,工作方式选择默认的,抓取工具。
如图2所示:图2机器人设置点击【插入机器人模型】后,会在绘图区显示导入的机器人,如图3所示:图3导入机器人导入工具在涂胶案例中,导入工具选择涂胶枪,在【场景搭建】中选择【导入工具】,如图4所示:图4导入工具导入工具后,工具和零件会自动装配,,效果如图5所示:图5导入工具导入零件在涂胶案例中,导入零件选择油盆在【场景搭建】中选择【导入零件】,如图6所示:图6导入零件导入零件后,在绘图区的效果如图7所示:图7导入零件默认的导入零件会在机器人底座下,首先选中零件,点击【工具】栏中的【三维球】,如图8所示:图8激活三维球在绘图区的效果,如图9所示:图9绘图区显示三维球固定三维球外炳与红色的短轴相对应的轴,向右移动1500mm,效果如图10所示:图10移动零件在【工具】点击【三维球】。
三维球即可消失。
保存工程文件点击保存或另存为按钮,将工程文件保存,命名为“涂胶.Robx”,工程文件默认的为Robx.二:【轨迹设计】轨迹生成环境搭建已完成,接下来生成轨迹,在【基础编程】中点击【生成轨迹】按钮,如图11所示:图11生成轨迹在弹出的属性面板中,【类型】选择沿一个面的一条边,拾取元素,线,面,搜索终止条件点,当左边的拾取元素字为红色时,处于可编辑状态,在绘图区的油盆上,点击一下红色面里边的一条线,接下在拾取元素面的空白处,点击一下,再在绘图区点击一下红色的面,以油盆的一圈为例,所以终止条件选择已选线的起始点,如图12所示:图12拾取线,面,点选取完毕,点击完成,,在绘图区即可显示生产的轨迹,如图13所示:图13生成轨迹默认的直线只会在起始和终止点显示,在【机器人加工管理】轨迹+,右击【沿一个面的一条边】,选择修改特征,如图14所示:图14修改特征选项在弹出的修改特征对话框中把【仅为直线生成首末点】前的对勾去掉即可,如图15所示:图15三:【仿真】仿真是看机器人能否以正确的姿态工作,在【基础编程】中点击【仿真】按钮,如图16所示:图16仿真图17仿真界面四:【后置】仿真没有问题后,接下来后置,后置是生成机器人代码,将后置的内容拷贝到示教器即可完成真机的运行。
ROBOT操作入门

ROBOT操作入门1. 简介ROBOT是一种强大的自动化测试框架,它可以模拟鼠标和键盘操作,帮助人们实现自动操作任务。
本文将介绍ROBOT操作的基本知识和入门技巧。
2. 安装ROBOT要开始使用ROBOT,需要先安装它。
ROBOT是基于开发的,需要确保已经安装好环境。
1. 打开命令行工具,输入以下命令安装ROBOT:pip install robotframework2. 等待安装完成后,输入以下命令验证ROBOT是否成功安装:robot --version如果显示ROBOT的版本号,则表示安装成功。
3. 编写ROBOT测试脚本SettingsDocumentation 这是一个测试脚本的简单描述Library SeleniumLibraryVariables${URL}${BROWSER} chromeTest Cases打开网页Open Browser ${URL} ${BROWSER}Maximize Browser Window搜索关键字Input Text id=search_input ROBOT操作搜索按钮Click Element id=search_button在上面的示例中,使用了`Settings`和`Variables`定义了一些全局设置和变量。
然后,定义了两个`Test Cases`,分别用于打开网页、搜索关键字和搜索按钮。
4. 运行ROBOT测试脚本要运行ROBOT测试脚本,需要使用ROBOT的命令行工具。
在命令行中输入以下命令:robot path/to/your/test_script.robot其中,`path/to/your/test_script.robot`是你的测试脚本的路径。
运行完成后,ROBOT会测试报告和日志文件。
可以通过浏览器打开测试报告查看测试结果。
5. ROBOT常用操作ROBOT提供了丰富的关键字,可以用于模拟各种操作,包括、输入文本、选择下拉框等。
工业机器人实训内容及操作步骤
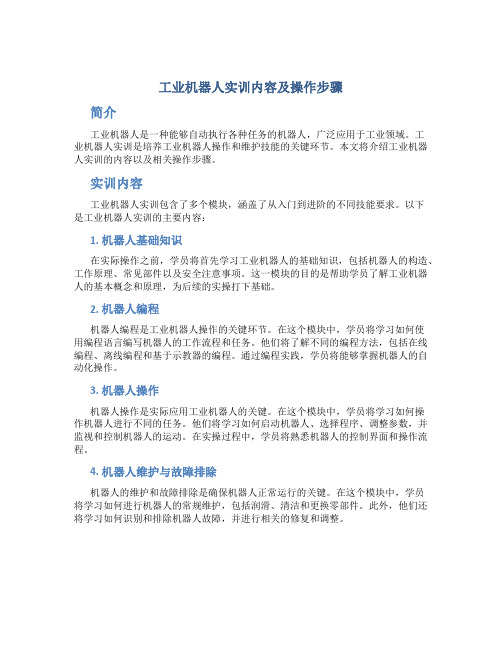
工业机器人实训内容及操作步骤简介工业机器人是一种能够自动执行各种任务的机器人,广泛应用于工业领域。
工业机器人实训是培养工业机器人操作和维护技能的关键环节。
本文将介绍工业机器人实训的内容以及相关操作步骤。
实训内容工业机器人实训包含了多个模块,涵盖了从入门到进阶的不同技能要求。
以下是工业机器人实训的主要内容:1. 机器人基础知识在实际操作之前,学员将首先学习工业机器人的基础知识,包括机器人的构造、工作原理、常见部件以及安全注意事项。
这一模块的目的是帮助学员了解工业机器人的基本概念和原理,为后续的实操打下基础。
2. 机器人编程机器人编程是工业机器人操作的关键环节。
在这个模块中,学员将学习如何使用编程语言编写机器人的工作流程和任务。
他们将了解不同的编程方法,包括在线编程、离线编程和基于示教器的编程。
通过编程实践,学员将能够掌握机器人的自动化操作。
3. 机器人操作机器人操作是实际应用工业机器人的关键。
在这个模块中,学员将学习如何操作机器人进行不同的任务。
他们将学习如何启动机器人、选择程序、调整参数,并监视和控制机器人的运动。
在实操过程中,学员将熟悉机器人的控制界面和操作流程。
4. 机器人维护与故障排除机器人的维护和故障排除是确保机器人正常运行的关键。
在这个模块中,学员将学习如何进行机器人的常规维护,包括润滑、清洁和更换零部件。
此外,他们还将学习如何识别和排除机器人故障,并进行相关的修复和调整。
5. 安全操作和风险评估在工业机器人实训中,安全操作是至关重要的。
学员将学习如何正确操作机器人,并遵守安全操作规程。
此外,他们还将学习如何评估和管理机器人操作中的风险,并制定相应的措施以确保操作的安全性。
操作步骤以下是工业机器人实训的一般操作步骤:步骤1:了解机器人在实训开始之前,学员将参观机器人实训室,了解机器人的基本情况,包括机器人的类型、工作范围和安全注意事项等。
步骤2:学习机器人基础知识学员将参与机器人基础知识的学习和讲解,包括机器人的构造、工作原理、常见部件和安全注意事项等。
机器人编程快速入门

机器人编程快速入门1. 简介机器人编程是一门能够教会机器人执行特定任务的技术。
通过编写代码,我们可以指导机器人完成各种动作和操作。
本文档将介绍如何快速入门机器人编程。
2. 基础知识在开始机器人编程之前,有一些基础知识是必须了解的:- 计算机基础知识:了解计算机的基本原理和操作系统的使用。
- 编程语言:选择一种常用的编程语言,如Python或C++作为机器人编程的工具。
- 机器人控制系统:熟悉机器人的硬件和软件系统,包括传感器、执行器和控制接口。
3. 研究资源为了快速入门机器人编程,以下是一些研究资源的推荐:- 在线教程:通过在线教程研究机器人编程的基础知识和技巧。
- 书籍:阅读相关的机器人编程书籍,深入理解原理和应用。
- 论坛和社区:参与机器人编程论坛和社区,与其他编程爱好者交流经验和解决问题。
4. 编程步骤下面是机器人编程的基本步骤:1. 定义任务:明确机器人需要完成的任务和目标。
2. 选择编程语言:根据任务的需求和个人偏好选择适合的编程语言。
3. 编写代码:在所选择的编程语言中编写代码实现任务。
4. 调试和测试:对编写的代码进行调试和测试,确保机器人能够正确执行任务。
5. 优化和改进:根据实际运行情况进行代码优化和改进,提升机器人的性能和效率。
5. 示例项目为了帮助快速入门机器人编程,以下是一个示例项目的步骤:1. 任务:让机器人从起点走到终点。
2. 选择编程语言:选择Python作为编程语言。
3. 编写代码:使用机器人控制接口编写代码,定义机器人的移动和判断逻辑。
4. 调试和测试:进行代码调试和测试,确保机器人能够按照预期行动。
5. 优化和改进:根据测试结果进行代码优化和改进,提高机器人的导航能力。
6. 总结通过本文档的指导,你可以快速入门机器人编程,并开始编写自己的机器人项目。
记住不断研究和实践是提升编程能力的关键,祝你在机器人编程的世界中取得成功!以上为《机器人编程快速入门》文档的内容。
ROBOT操作入门
ROBOT操作入门随着科技的不断发展,机器人已经成为我们日常生活中一个不可或缺的部分。
无论是在工业生产中,还是在家庭中,机器人都能够为我们提供极大的帮助和便利。
而要掌握机器人的操作,需要一些基本知识和技能。
以下是机器人操作的入门指南,帮助你了解如何使用机器人并进行简单的操作。
1.了解机器人类型首先,你需要了解不同类型的机器人。
一般来说,机器人可以分为三大类:工业机器人、服务机器人和教育机器人。
工业机器人主要用于生产线上的自动化操作,服务机器人则提供一些日常服务,如导航、清洁等,而教育机器人则用于教学和学习。
你需要根据自己的需求来选择适合的机器人类型。
2.熟悉机器人的功能每种机器人都有不同的功能和操作方式。
在开始操作之前,你需要熟悉机器人的各种功能和按钮的使用方法。
通常,你可以在机器人的使用手册或者官方网站上找到这些信息。
了解机器人的功能将帮助你更好地使用它。
3.学习机器人编程机器人的操作通常需要进行编程。
编程是告诉机器人应该做什么和如何做的过程。
有些机器人提供了图形化编程界面来帮助初学者进行编程,如LEGO Mindstorms和Scratch等。
其他一些机器人则需要你学习一些编程语言,如Python或C++。
你可以通过在线教程、培训课程或书籍来学习机器人编程。
4.了解传感器和反馈机器人通常会配备各种传感器,以便感知周围环境。
常见的传感器包括触摸传感器、声音传感器、视觉传感器和红外线传感器等。
这些传感器可以帮助机器人做出反应和作出决策。
你需要了解这些传感器的使用和工作原理,并学习如何使用它们来与机器人进行交互。
5.进行简单的机器人操作一旦你熟悉了机器人的功能和编程,你可以开始进行一些简单的机器人操作。
这包括控制机器人的运动,使用传感器进行交互和执行一些基本任务。
例如,你可以编写程序让机器人在一条线上移动,或者使用触摸传感器让它反应到触摸。
6.与其他机器人爱好者交流与其他机器人爱好者交流将有助于你扩展知识和技能。
ROBOT操作入门

ROBOT操作入门ROBOT操作入门简介ROBOT是一种自动化测试框架,可以帮助开发人员执行各种自动化任务。
它使用简单且易于理解的DSL(Domn-Specific Language)来描述测试用例的步骤和预期结果。
本文档将介绍ROBOT的基本概念和操作入门,帮助读者快速上手。
安装和配置在开始使用ROBOT之前,您需要先安装ROBOT框架。
ROBOT支持Windows、Linux和Mac操作系统,可以从官方网站()上安装包,并按照官方文档的指导进行安装。
安装完成后,您需要配置ROBOT的环境变量。
在Windows系统中,您可以将ROBOT的安装路径添加到系统的PATH变量中。
在Linux和Mac系统中,您可以将ROBOT的安装路径添加到.bashrc或者.profile文件中。
配置完成后,您可以在命令行中输入`robot --version`命令来验证ROBOT是否成功安装。
编写测试用例ROBOT使用.robot文件来编写测试用例。
每个.robot文件由多个测试用例组成,每个测试用例由关键字和参数组成。
下面是一个简单的测试用例示例:markdownTest Cases按钮[Documentation] 测试按钮功能[Tags] Regression输入用户名 admin输入密码 56登录按钮验证登录成功在上述示例中,` Test Cases `表示测试用例的开始,`按钮`表示这个测试用例的名称。
接下来是测试用例的详细步骤,每行一个关键字和参数。
可以看到,ROBOT的DSL语法非常简洁,易于理解和编写。
您可以根据实际需求,自定义关键字并在测试用例中调用。
运行测试用例编写完测试用例后,您可以使用ROBOT来运行这些测试用例。
在命令行中输入以下命令即可:robot path/to/testcase.robot其中,`path/to/testcase.robot`是您编写的测试用例文件的路径。
ROBOT会自动解析并执行这些测试用例,并测试报告。
RobotAr软件界面及基本功能介绍

软件界面与基本功能介绍总的来说,软件界面主要分为九大部分:标题栏、菜单栏(机器人编程、工艺包、自定义)、绘图区、机器人加工管理面板、调试面板、机器人控制面板、输出面板和状态栏等。
图示:软件界面●标题栏:显示软件名称和版本号;●菜单栏:涵盖了RobotArt的基本功能,如场景搭建、轨迹生成、仿真、后置、自定义等,是最常用的功能栏;●绘图区:用于场景搭建、轨迹的添加和编辑等;●机器人加工管理面板:由八大元素节点组成,包括场景、零件、工件坐标系、外部工具、快换工具、状态机、机器人以及工作单元等,通过面板中的树形结构可以轻松查看并管理机器人、工具和零件等对象的各种操作;●机器人控制面板:控制机器人六个轴和关节的运动,调整其姿态,显示坐标信息,读取机器人的关节值,以及使机器人回到机械零点等;●调试面板:方便查看并调整机器人姿态、编辑轨迹点特征;●输出面板:显示机器人执行的动作、指令、事件和轨迹点的状态;●状态栏:包括视向等功能。
1.机器人编程机器人编程,可进行场景搭建、轨迹设计、模拟仿真和后置生成代码等操作,包括“文件”“场景搭建”“基础编程”“工具”“显示”“高级编程”和“帮助”等七个功能分栏。
【文件】文件的新建、打开和保存。
RobotArt打开和保存的文件均为工程文件robx。
图示:文件菜单栏◎新建:创建空白工程文档。
◎打开:打开已存在的工程文件。
◎保存:保存当前工程文件到指定位置。
若是已有保存记录的文件,默认保存到原位置。
若是新建文件,保存时则会弹出对话框,选择保存位置。
◎另存为:将当前文件另存到指定位置。
【场景搭建】位置:位于【机器人编程】下的【场景搭建】中。
图示:“场景搭建”位置说明:完成一个完整的加工工艺需要机器人、工具、零件和工作台。
在正式规划机器人运动路径之前,需先进行场景搭建。
【机器人库】【工具库】【设备库】用来分别导入机器人、工具、零件、底座和状态机等。
●输入:支持多种格式的文件导入到RobotArt环境中。
工业机器人教案-个人-PQArt入门必读

RobotArt中的POS点 有两个作用:一是机器 人的过渡点,即安全 点,用于优化机器人的 运动路径,让机器人避 免发生碰撞;二是零件 的驱动点,生成零件的 驱动轨迹。
步长
步畏
相邻两个轨迹点之间 的距离,单位为mn%
后置
即生成后置代码,将代 码拷贝到示教器,实现 机器人的真机运行。
机械零点
車件仿竟与节拍分 析技术
自适应机器人求解 履与后置生成技
支持深度自定义的 开放系统架构
1.4 RobotArt有什么优势?
RobotArt有哪些优势呢?
(1)RobotArt在线版本实时更新
(2)丰富的资源库
支持对机器人、工具等资源进行排序、筛查、 统计等,并 状态机寻设昔.用于 搭建场聂或制進抑工"
(3)给予大客户账号管理权限.后台控制权限等。
用户可在后台查看并修改个人的基本信息、管理负责的大客户。
絶白6
更鶴“
A个人■多
H?G*B
■
TOP-I0-3I09:36M
20tB-10-3109t634
1
•0
2OWW1300800
芹也H券
2
1%大祈门甘宵
(4)我们一站式的服务是这样的:
仿制作
15RobotArt快捷键使用方法
用于表明工件或者工 装在世界坐标系中的 位置(基坐标系显示相 对于世界坐标系,数据 计算相对于机器人坐 标系),可自由定义。
工具坐标系
即工具中心点,简称TCP,可自由定义。
法兰坐标系
固定于机器人的法兰 盘上,是工具的装夹原 点(一般常见的法兰坐 标系都是Z轴朝外,X轴朝下)
工件坐标系
是固定于工件上的笛 卡尔坐标系,是编程人 员在编制程序时用来 确定刀具和程序起点 的,该坐标系的原点可 由使用人员根据具体 情况确定。
RobotArt离线编程 轨迹基础知识

RobotArt离线编程轨迹基础知识RobotArt作为一款中国人自己的离线编程软件,其核心技术已经相当完善成熟。
要想机器人在真机上完成加工动作,当然少不了轨迹设计。
轨迹设计,这是离线编程的一个核心内容。
而了解轨迹的基础知识是我们完成轨迹设计的基石。
1.什么是轨迹轨迹是符合一定条件的动点所形成的图形。
在RobotArt中,轨迹指的是机器人的运动路径。
它是由若干个轨迹点和轨迹点之间的路径组成。
其中,轨迹点是核心,它记录了机器人在改点时的方位和姿态。
机器人实际的运动,就是轨迹上的这些点的次序,依次执行来实现的。
2.轨迹作用机器人运动的路径、方向、姿态,乃至机器人的一系列动作等都是由机器人的轨迹来决定的。
机器人能够重复地完成一系列复杂的动作,全靠隐藏在轨迹内的参数驱动来实现。
后续的机器人仿真,后置等同样也是基于轨迹来实现。
3.轨迹的完整操作流程生成轨迹→编辑轨迹→仿真轨迹→后置①生成轨迹:轨迹类型有七种,包括:沿着一个面的一条边,面的外环,一个面的一个环,曲线特征,边,打孔,点云打孔等,它们分别根据边、线、面等来生成轨迹,我们应根据具体情况来选择轨迹的生成类型。
轨迹生成之后,所选轨迹的每个轨迹点都会显示在调试面板上。
②编辑轨迹:轨迹编辑的目的是优化机器人运动的路径和姿态,最终实现比较理想的机器人工作动作。
轨迹生成后可能因为机器人的位置和关节运动范围等条件限制,出现不可达、轴超限、奇异点等问题,这时就需要编辑轨迹。
轨迹编辑的方法有很多种,比如:轨迹优化,编辑点,统一位姿,编辑多个点,轨平移和旋转等。
可以结合轨迹的状况,选择适合单个或者多个轨迹的编辑方法对轨迹进行编辑,直到所有轨迹点处于机器人最优的姿态位置为止。
③仿真轨迹:RobotArt可实现对单条/多条轨迹的仿真演示,通过仿真功能,在虚拟环境中模拟真实环境下机器人的运动路径和状态,提前检测出机器人实际运行过程中可能会出现干涉、碰撞、不可达、奇异点等状况,为后续改进、完善轨迹路径提供依据,也尽最大的可能避免实际运行中因轨迹问题造成的经济损失,同时从总体方面来看,也极大地提高了工作效率。
Robostar入门手册l[CN]
![Robostar入门手册l[CN]](https://img.taocdn.com/s3/m/0c7d1849767f5acfa1c7cd77.png)
■ 从机器人的安装到运行的过程说明顺序1机构部的组装 & 控制器的连线工作<连接Cable 1,2轴><连接Cable 3,4轴>수평다R C 정水平多关节机器人水平多关节机器人正面①②③④⑤⑥<注意>• 电源排线时请检查 DC24V的极性连接是否正确。
• 排线有误时可能会损坏内部元件. 特别是, Common端子的极性一定要正确。
☞ 系统 I/O 没有接线的状态下接通控制器电源时,会发生 " SYSTEM EMERGENCY" Error . 这时的措施请参照以下内容。
☞ PLC 操作板上一般情况下会缺少很多关于机器人的状态表示Lamp, 制作操作板时请参照下图中的内容。
■ 电路图☞ 以下说明对应于 安装了Z轴Air cylinder的Type。
☞ 在Z轴增加了利用 Air cylinder的WeightBalance功能可以 UP 负载的重量, 在Cylinder上连接的 Air电路如下。
☞ 注意事项:开关电磁阀的信号是建议使用 Air press s/w的输出接点信号。
☞ 电路说明① 3port sol v/v :-. 电源 off 状态 (Air供应 停止: Brake 动作) -. 电源 on 状态 (Air 供应 : 消除 Brake)※ 解除刹车Air port 部进入空气推动活塞后Brake金属片会松开活塞可以自由移动。
※ 刹车动作Air port里的空气排出后活塞及金属片恢复原来状态在活塞路径上的刹车动作。
② Press s/w 功能Air切断时空气压力下降,这时低于PRESS开关设定的压力之下时就会输出输出接点信号,该接点信号送到系统I/O EMG时所有作业停止。
③ Precision Regulator 的功能根据挂在上下运动轴的负载的重量调整设定适当的Air量。
如果设定得不好,则上下动作时动作不流畅还会发生很多Error,所以设定适当的量非常重要。
ROBOT操作入门

ROBOT操作入门ROBOT操作入门1. 简介Robot是一个功能强大的自动化测试框架。
它使用编写,可以模拟用户在图形化界面上的操作,并进行一系列自动化的测试。
Robot提供了丰富的测试库、强大的测试工具和易于阅读的测试报告,使得测试人员可以快速、高效地进行自动化测试。
2. 安装要使用Robot进行自动化测试,需要安装Robot框架。
可以通过pip命令进行安装:pip install robotframework安装完成后,可以使用以下命令验证安装是否成功:robot --version如果成功安装,会显示Robot框架的版本号。
3. 准备工作在使用Robot进行自动化测试之前,需要准备以下工作:3.1. 编写测试用例测试用例是Robot中的基本组织单元,用于描述需要进行的操作和预期的结果。
测试用例可以使用Robot的语法进行编写,具体的语法规则可以参考Robot的官方文档。
3.2. 准备测试环境测试环境是运行自动化测试所需的各种资源和条件。
这包括软件、硬件、网络等各个方面。
在编写测试用例之前,需要确认测试环境已经搭建完成,并且符合测试要求。
3.3. 配置测试框架测试框架是Robot的一部分,用于管理测试用例和测试库。
可以通过简单的设置文件对测试框架进行配置,例如选择要使用的测试库、定义测试报告的输出格式等。
4. 执行测试当准备工作完成后,就可以执行测试了。
可以通过以下命令执行测试:robot path/to/test/case/其中,`path/to/test/case/`是测试用例文件的路径。
执行测试后,Robot会按照编写的测试用例进行操作,并测试报告。
5. 分析测试结果执行测试后,Robot会详细的测试报告,其中包含测试用例的执行结果、运行时间、错误信息等。
可以通过打开测试报告查看测试结果,并分析测试结果,以便进一步优化自动化测试。
6. 学习资源Robot是一个开源的测试框架,拥有活跃的社区和丰富的学习资源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RobotArt快速入门
RobotArt是神马东东?有什么神奇的功能?在这我们先通过一个涂胶案例,让您5分钟了解RobotArt,一站式解决方案,实现机器人代替人类的工作,接下来我们就看一下下。
怎么个操作步骤。
一:【工作站构建】
工作站构建主要是导入机器人,工具,零件,机器人工作时需要的模型
导入机器人
在涂胶案例中,选择KUKA-KR150-R2700-extra型号的机器人,在【场景搭建】选择【导入机器人】如图1所示:
图1导入机器人
在弹出的机器人设置界面,选择【KUKA-KR150-R2700-extra】,工作方式选择默认的,抓取工具。
如图2所示:
图2机器人设置
点击【插入机器人模型】后,会在绘图区显示导入的机器人,如图3所示:
图3导入机器人
导入工具
在涂胶案例中,导入工具选择涂胶枪,
在【场景搭建】中选择【导入工具】,如图4所示:
图4导入工具
导入工具后,工具和零件会自动装配,,效果如图5所示:
图5导入工具
导入零件
在涂胶案例中,导入零件选择油盆
在【场景搭建】中选择【导入零件】,如图6所示:
图6导入零件
导入零件后,在绘图区的效果如图7所示:
图7导入零件
默认的导入零件会在机器人底座下,首先选中零件,点击【工具】栏中的【三维球】,如图
8所示:
图8激活三维球
在绘图区的效果,如图9所示:
图9绘图区显示三维球
固定三维球外炳与红色的短轴相对应的轴,向右移动1500mm,效果如图10所示:
图10移动零件
在【工具】点击【三维球】。
三维球即可消失。
保存工程文件
点击保存或另存为按钮,将工程文件保存,命名为“涂胶.Robx”,工程文件默认的为Robx.二:【轨迹设计】
轨迹生成
环境搭建已完成,接下来生成轨迹,
在【基础编程】中点击【生成轨迹】按钮,如图11所示:
图11生成轨迹
在弹出的属性面板中,【类型】选择沿一个面的一条边,拾取元素,线,面,搜索终止条件点,当左边的拾取元素字为红色时,处于可编辑状态,在绘图区的油盆上,点击一下红色面里边的一条线,接下在拾取元素面的空白处,点击一下,再在绘图区点击一下红色的面,以油盆的一圈为例,所以终止条件选择已选线的起始点,如图12所示:
图12拾取线,面,点
选取完毕,点击完成,,在绘图区即可显示生产的轨迹,如图13所示:
图13生成轨迹
默认的直线只会在起始和终止点显示,在【机器人加工管理】轨迹+,右击【沿一个面的一
条边】,选择修改特征,如图14所示:
图14修改特征选项
在弹出的修改特征对话框中把【仅为直线生成首末点】前的对勾去掉即可,如图15所示:
图15
三:【仿真】
仿真是看机器人能否以正确的姿态工作,
在【基础编程】中点击【仿真】按钮,如图16所示:
图16仿真
图17仿真界面
四:【后置】
仿真没有问题后,接下来后置,后置是生成机器人代码,将后置的内容拷贝到示教器即可完成真机的运行。
在【基础编程】中点击【后置】,如图18所示:
图18后置按钮
在弹出的后置界面中,直接点击【生成文件】,其它选项都选默认的,如图19所示:
图19后置界面
选一个路径保存,文件命名为英文名。
将生成的后置文件拷贝到示教器,机器人可以工作。
五:【真机运行】
将后置代码,通过U盘拷贝到示教器即可完成真机运行。
故事未完,待续。
-------Candy。