矿井提升机PLC智能控制系统研究
矿井提升机plc控制系统设计-正文
矿井提升机plc控制系统设计摘要矿井提升机制动系统,是矿井提升系统的安全保障环节,对矿井提升生产效率和工作性能都有着重要意义。
矿井提升机制动系统由液压站和制动器两部分组成,其制动性能直接影响到提升系统的稳定性与安全性。
矿井提升机制动系统的可靠性和准确性是矿井提升和安全运行的重要保证。
目前,提升机制动系统多采用盘式制动器,盘式制动器的制动力由液压泵站提供。
本文对提升机制动系统中液压站和制动器的结构组成及工作原理进行了简单的介绍,同时对相关参数进行计算,总结了提升机制动系统制动性能的评判要求,以及影响制动性能的主要因素。
为了保证液压泵站的安全运行,便于操作人员掌握工作状况,本文设计了提升机制动控制系统。
关键词:盘式制动器;液压站;安全目录1.引言 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)2.矿井提升机制动系统 (3)2.1提升机液压系统的组成与工作原理 (3) (3) (4) (5)2.2提升机盘式制动器的结构与工作原理 (6) (6) (7)2.3制动性能及其影响因素 (7) (7) (9)2.4系统硬件部分 (10)2.5系统软件部分 (11)3.结语 (12)参考文献 (14)致谢 (16)1.引言1.1研究背景及意义在煤矿企业生产过程中矿井提升机是十分关键及重要的设备之一,其主要功能是提升矿物以及升降人员,担负着采矿生产活动正常运行的重要任务,占有极其重要的地位。
提升机在运行时的安全性及可靠性是由其制动性能的优劣决定的。
在工作运行过程中矿井提升设备遇到故障,而没有采取有效地紧急制动措施,这种情况将导致的后果不仅是提升机设备自身损坏,而且极大的可能会造成人员伤亡的严重事故。
根据以往提升机出现故障事故的不完全统计结果分析,60%以上的提升故障都是由于制动系统出现问题而造成的。
国内煤矿到目前为止因为提升机制动系统故障而造成严重事件的例子有相城煤矿中的主斜井提升机就是由于制动系统在紧急制动过程中产生的制动力矩过大,断绳事件多次出现;而石台煤矿主井的提升机上由于没有及时保养清理,其制动盘出现过多的油污,导致在紧急制动过程中产生的制动力矩过小,在工作运行中致使重载箕斗坠入井底,导致了生产不能正常进行及巨大的经济损失。
基于PLC 的矿井提升机变频调速控制系统
目录摘要 (III)关键词 (III)Abstract (IV)Keywords (IV)第1章绪论............................................................. - 1 -1.1国内外矿井提升机发展现状......................................... - 1 -1.1.1国内矿井提升机电气控制系统的现状........................... - 1 -1.1.2国外提升机电气控制系统的现状............................... - 2 -1.2课题研究的目的和意义............................................. - 3 -1.3本论文承担的任务................................................. - 4 -1.4小结............................................................. - 5 - 第2章矿井提升机调速控制系统分析....................................... - 6 -2.1引言............................................................. - 6 -2.2提升机工作原理及机械结构......................................... - 6 -2.3提升机调速控制方式及调速性能分析................................. - 7 -2.3.1提升机直流调速性能分析..................................... - 7 -2.3.2提升机交流调速性能分析..................................... - 8 -2.4提升机调速控制方案分析........................................... - 9 -2.4.1传统转子回路串电阻调速系统................................ - 10 -2.4.2模糊控制调速系统.......................................... - 10 -2.4.3直接转矩控制系统.......................................... - 11 -2.4.4矢量控制变频调速系统...................................... - 12 -2.5小结............................................................ - 14 - 第3章提升机调速控制系统硬件实现...................................... - 15 -3.1引言............................................................ - 15 -3.2提升机电控系统总体结构.......................................... - 15 -3.3提升机电控系统变频器选择........................................ - 17 -3.4变频控制部分设计................................................ - 17 -3.4.1变频调速主系统设计........................................ - 17 -3.4.2变频器外部电路设计........................................ - 20 -3.5 PLC控制部分设计................................................ - 24 -3.5.1基本控制功能.............................................. - 24 -3.5.2位置检测电路.............................................. - 28 -3.6硬件调速控制系统保护措施........................................ - 29 -3.6.1热继电器过载保护.......................................... - 30 -3.6.2调速控制系统抗干扰处理.................................... - 31 -3.7小结............................................................ - 33 - 第4章提升机调速控制系统软件实现...................................... - 34 -4.1引言............................................................ - 34 -4.2矿井提升机中S型速度曲线建模及实现.............................. - 34 -4.2.1速度曲线的选择及给定方法.................................. - 34 -4.2.2提升机理想S形速度曲线数学模型............................ - 35 -4.2.3理想速度曲线的实现........................................ - 39 -4.3调速控制系统软件流程............................................ - 42 -4.4小结............................................................ - 44 - 第5章全文总结........................................................ - 45 -5.1提升机电控系统主电路部分........................................ - 45 -5.2控制系统软件设计部分............................................ - 45 -5.3提升机速度控制理论分析及抗干扰保护.............................. - 46 - 参考文献............................................................... - 47 - 致谢................................................................... - 48 -基于PLC的矿井提升机变频调速系统设计摘要传矿井提升机是煤矿安全生产的关键设备之一,其作用是提升煤炭、矸石,升降人员和下放物料等,在整个煤矿生产中占有十分重要的地位。
论文12矿井提升机电控系统原理设计
矿井提升机电控系统原理设计摘要我国矿井提升机大多是采用交流异步电机拖动,其电气控制系统采用转子串、切电阻调速,由继电器-接触器构成逻辑控制装置。
本文以安全、可靠、高效、经济为出发点,以可靠性原则为依据,对矿井交流提升机电控系统进行研究设计,由可编程控制器(PLC)代替继电器-接触器构成的逻辑控制装置。
其中简单介绍了国内外矿井提升机发展概况,提升机机械结构、工作原理,分析了其技术经济性。
对于PLC的控制原理及应用做了一般性的介绍。
详述了提升机电控系统和调速原理,如:测速部分和保护部分。
本文以TKD-NT 单绳缠绕式矿井提升机为例,提出了研究设计方案,并且在实践中成功实施。
PLC电控系统实现了对提升过程的程序控制,精度高;实现了速度、电流以及矢量的数字交换等,对提升机进行闭环调节;实现行程、速度等重要参数及提升状态的监视;实现无触点控制,寿命长,可靠性大大提高,具有良好的控制监视系统;实现了显示、记录等有关数据的全部自动化。
关键词:矿井交流提升机,PLC,调速,电控技术研究THE DESIGN OF ELECTRIC CONTROL SYSTEMBASED ON MINE ELEVATORABSTRACTIn China, mine elevator whose electric control system uses speed regulation by means of stringing and slicing the rotor resistance, and it constitutes the logic control device by the relay and contactor adopting the means of the drive of AC asynchronous motor in most cases. This paper which studies and designs the electric control system of AC mine elevator, adopting PLC which takes the place of the logic control device constituted by the relay and contactor takes the security, reliability, high efficiency, economy as a starting point, and takes the reliability principle as the basis. There into, this paper gives a brief introduction on the development of mine elevator in home and abroad, its framework and theory, while doing some economic study. Then, it introduces the theory and application of PLC simply. On the side, it goes into particulars about electric control system, for example, speed measurement and safeguard. This paper sets TKD-NT elevator for an example, proposes the research and design plan which puts in practice successfully. The electric control system based on PLC has carried out the procedure control of hoist process and high accuracy, closed-cycle control of mine elevator through speed, electric current as well as digital switching of vector and so on, the monitor of important parameters such as the distance of travel, speed, the state of hoist. In addition, the system also has carried out contact less control, long life-span, reliability greatly improved, good control supervisory system and completely automation of relevant data’s demonstration, recording and so on.KEY WORDS: AC mine elevator, PLC, speed regulation, electric controltechnology research目录前言 (1)第1章国内外矿井提升机发展概述 (2)§1.1国外矿井提升机现状 (2)§1.2我国矿井提升机电气控制系统的现状 (2)第2章提升机机械结构及工作原理 (4)§2.1机械结构 (4)§2.2工作原理 (5)第3章串电阻调速系统 (7)§3.1串电阻调速系统原理 (7)§3.2串电阻调速程序 (8)第4章提升机电控系统构成 (14)§4.1引言 (14)§4.2主回路 (15)§4.3测速回路 (16)§4.4安全回路 (16)§4.5控制回路 (18)§4.5.1 信号回路 (18)§4.5.2 电机正反转回路 (18)§4.5.3 制动回路 (19)§4.5.4 转子电阻控制回路 (19)§4.6监控系统 (20)§4.6.1 上位机 (20)§4.6.2 操作台 (21)第5章PLC 操作主控系统原理及应用 (22)§5.1PLC系统组成 (22)§5.2各单元基本特点 (22)第6章技术经济性分析 (24)结论 (26)致谢 (27)参考文献 (28)前言矿井提升机常被人们称为矿山的咽喉,是矿山最重要的关键设备,是地下矿井与外界的唯一通道,肩负着矿石、物料、人员等的重要运输责任。
PLC控制煤矿矿井提升机
摘要煤矿矿井提升机是煤矿的重要设备,随着计算机PLC和液压技术的不断进步,采用先进的控制技术和液压比例加载技术来改造传统矿山行业的传统控制系统,从而使矿井提升机的控制性、安全性、防冲击能力得到很大发的改善,其控制系统和液压比例加载系统的技术性能和可靠性能直接影响煤矿的安全生产。
本设计重点对矿井提升机液压站系统和比例溢流阀应用上进行了重点研究。
电液比例控制系统与可编程控制器PLC相结合,压力传感器将采集的信号经处理后送入PLC中对信号进行处理从而发出控制信号,控制信号经放大控制器处理后作用在比例溢流阀上,控制比例电磁铁作用,控制液压源到液压缸的流量在液压缸中产生不同的压力从而达到控制盘闸制动器的目的。
关键词:提升机,电液比例,PIDAbstractMine hoist is the important equipment in coal mine, with the development of computer PLC and hydraulic technology, the traditional control system to transform the traditional mining industry to adopt the control technology and hydraulic proportional loading technology advanced, so that the mine safety machine anti impact ability obtained the very big development improvement, its technical performance control system and hydraulic proportional loading system and reliable performance directly affects the safety in production of coal mine. This paper adopts PLC technology to control the electro-hydraulic loading system. The PLC programmable controller so that it can be compared to the traditional mine safety system greatly improve the electro-hydraulic proportional loading system, running more stable and accurate. The reconstructed system can meet the stringent requirements of the mine production, but relatively little investment, high cost performance, has a strong practical value.Keywords: hoister ,electro-hydraulic,proportional PID目录第一章绪论 (5)1.1 课题研究意义 (5)第二章电液比例控制系统与PLC概述 (9)2.1电液比例控制系统 (9)2.2 PLC的简介 (10)第三章矿井提升机制动系统及其液压站设计 (14)3.1 盘闸制动器的工作原理 (14)3.2 制动过程分析研究 (15)3.3 性能参数的确定 (19)3.4 盘式制动系统的液压站 (20)第四章基于PLC的电液比例控制系统 (24)4.1 比例控制放大器 (25)4.2比例液压系统设计 (29)4.3 基于PLC的电控系统设计 (31)4.4建模与分析 (33)第五章电气控制要求 (41)5.1 I/O地址分配 (41)5.2 S7--200程序设计梯形图 (46)参考文献 (54)致谢词 (54)附录-外文文献及翻译 (56)前言矿井提升机是矿山生产的至关重要的大型设备,对矿井的生产和安全起着非常重要的作用,有着重要的国民经济意义。
基于PLC矿井提升机控制系统设计
基于PLC矿井提升机控制系统设计矿井提升机控制系统是矿井生产过程中非常重要的一环,它的设计与实现对于安全、高效的矿井生产具有重要意义。
基于PLC的控制系统设计能够更好地实现对提升机的精确控制。
本文将探讨基于PLC的矿井提升机控制系统的设计。
一、系统总体设计矿井提升机控制系统的总体设计包括硬件设计和软件设计两个方面。
硬件设计方面,需要选择适合的PLC控制器和外围设备。
PLC控制器一般采用可编程逻辑控制器,因为PLC具有稳定性好、可靠性高、可编程性强等优点。
外围设备包括传感器、执行器等,用于对矿井提升机的状态进行检测和控制。
软件设计方面,需要编写PLC程序来实现对矿井提升机的控制。
软件设计应该包括以下几个基本要素:1.输入接口:用于接收外部输入信号,如压力、温度等传感器信号。
2.输出接口:用于输出控制信号,如电机启停、行走控制等。
3.逻辑控制:实现对提升机的自动控制,包括启停、速度调节等功能。
4.保护控制:实现对提升机的各种保护功能,如超载保护、温度保护等。
5.监控功能:实现对提升机运行状态的实时监控,包括显示当前状态、报警功能等。
二、具体控制功能设计1.提升机启停控制:根据生产需要,通过PLC程序控制提升机的启停。
2.提升机速度控制:通过调节电机频率,实现提升机运行速度的调节。
3.提升机方向控制:通过控制电机正反转,实现提升机的正向运行和反向运行。
4.紧急停止控制:提供紧急停止按钮,一旦发生紧急情况,通过PLC程序实现提升机的紧急停止。
5.温度保护控制:对提升机电机进行温度检测,一旦温度过高,通过PLC程序发出警报信号并停止提升机的运行。
6.超载保护控制:对提升机进行负载检测,一旦检测到负载超过额定负载,通过PLC程序发出警报信号并停止提升机的运行。
7.撞击保护控制:安装撞击传感器,一旦检测到撞击信号,通过PLC程序发出警报信号并停止提升机的运行。
8.状态监测与显示:通过PLC程序实时监测提升机的运行状态,如电机转速、负载情况等,并通过显示器显示相关信息。
矿井提升机PLC智能控制系统研究
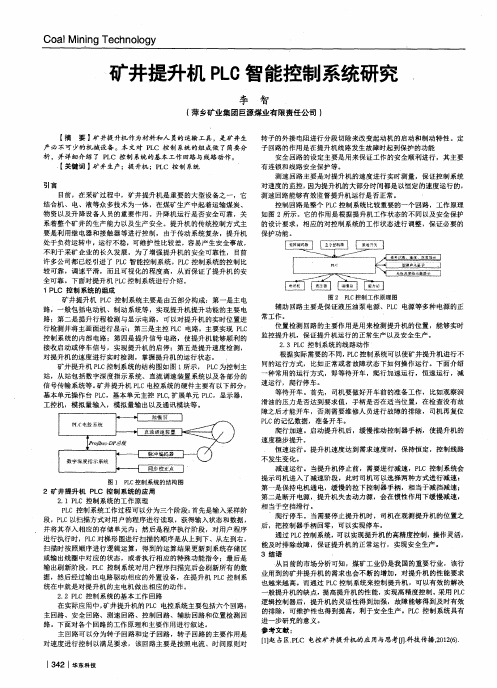
转子 的外接 电阻进 行分段 切除来 改变起 动机 的启 动和制动特 性。定 子回路的作用 是在提升机线路发生故障时起到保护的功能 安全回路的设定主要是用来保证工作的安全顺利进 行,其主要 有 连锁 和 线路 安全 保 护 等 。 测 速 回 路 主 要 是 对 提 升 机 的 速度 进 行 实 时 测 量 , 保 证控 制 系 统 对速度 的监控 , 因为提 升机 的大部分时间都是 以恒定的速度运行的 , 测速 回路 能够有效监督提升机运行是否正常。 控制回路是整个 P L C控制 系统 比较重要的一个回路 ,工作原理 如图 2所示。它的作用是根据提升机工作状态的不同 以及安全保护 的设计 要求 ,相 应的对控 制系统的工作状态进行 调整 ,保证 必要的 保护 功 能 。
Co a l Mi n i n g Te c h n o l o g y
矿井提升机 P L C智能控制 系统研究
李 智
( 萍乡矿业集团 巨源煤业有限责任公 司 )
【 摘 要】 矿 井提 升机 作为材料 和人 员的运输工具 ,是矿 井生
产 必 不 可 少 的机 械 设 备 。本 文 对 P L C 控 制 系统 的 组 成 做 了 简要 分
辅助回路主要是保证液压油泵电源、P L C 电源等多种电源的正 常工作。 位置检测回路的主要作用是用来检测提升机的位置,能够实时 监控提升机 ,保证提升机运行 的正常生产 以及安全生产。 2 . 3 P L C控制系统的线路动作 根据实际需要的不同, P L C 控制系统可 以使矿井提升机进行不 同的运 行方 式,比如正常或者故障状态 下如何操作运 行。下面介绍 种常用的运行方式 ,即等待开车 ,爬行加速 运行,恒速运行 ,减 速运 行,爬 行停车 。 等待开车 首先,司机要做好开车前的准备工作, 比如观察润 滑油的压力是否达到要求值,手柄是否在适当位置,在检查没有故 障之后 才能开车,否则需要维修人员进 行故障的排除,司机再复位 P L C的记忆数据 ,准备开车 。 爬行加速 。启动提升机后,缓慢推动控制器手柄,使提升机的 速度稳步提升。 恒速运行 。提升机速度达到需求速度时,保持恒定 ,控制线路 不发生变化。 减速运行 。当提升机停止前 ,需要进行减速 ,P L C控制系统会 提示司机进 入了减速阶段 ,此时司机可 以选择两种方式进行减速: 第一是保持 电机通 电,缓慢的拉下控制器手柄,相当于减挡减速 ; 第二是断开 电源,提升机 失去动力源,会在惯性作用下缓慢减速,
PLC技术在煤矿提升机电控系统中的应用
PLC技术在煤矿提升机电控系统中的应用本文通过介绍PLC技术的原理,分析PLC技术在煤矿提升机电控系统中的应用,提出PLC技术在煤矿提升机电控系统中应用的必然性,并从PLC的不同方面来分析其在煤矿提升机电控系统中的地位,最后提出PLC技术在实际生产中发展的新思路,以期促进PLC技术在煤矿中的进一步发展。
标签:PLC 技术;煤矿提升机;电控系统;应用0 引言在科技发达的今天,各行各业都与信息技术接轨,信息技术在当前的时代下发挥着不可替代的作用。
在此趋势下,国内外煤炭产业均将信息技术引入,许多煤炭企业将实际生产与计算机技术相结合。
尤其是在矿井提升机系统控制的过程中,计算机可谓是必不可少的,因此研究这一课题意义重大。
1 PLC技术与原理PLC技术具有较好的可控性,在自动化机械中属于佼佼者,且适应于多种复杂环境。
PLC具有非常强的自我诊断能力,当设备偏离正常运行轨迹运行时PLC 会自动报警,这一功能降低了事故的发生率。
PLC还能通过很多方式与机器连接,比最原始的控制系统增加了更多的优点,能准确、有效地分析信号、判断信号,并且对机器发出正确的命令,从而达到精准控制的效果。
PLC的输入与输出都是通过低压电器发送和接收的,PLC运用电子电路的原理来控制机械化的工艺,运用电子电路技术能保证PLC的电路具有抗干扰的作用。
PLC具有结构简单、故障率小、使用时间长等优点,传统的控制机械在高强度的工作环境下容易产生故障,不仅提高了生产成本,还会影响工作效率,因此通过综合分析可以发现,以PLC为主要控制系统设备将在未来的煤矿企业中占据重要地位。
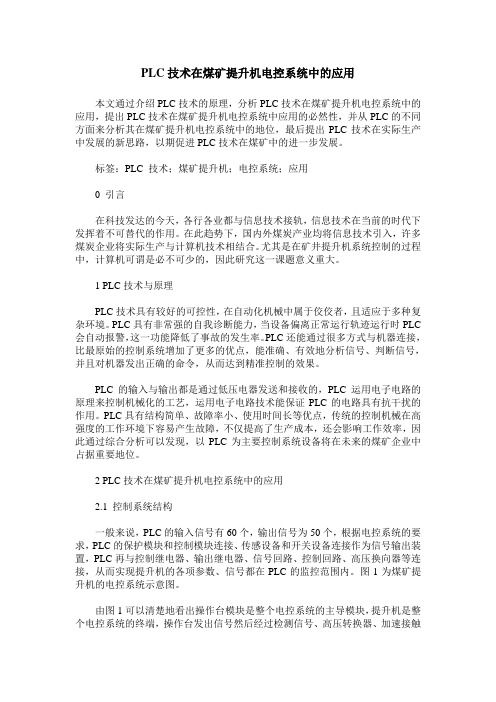
2 PLC技术在煤矿提升机电控系统中的应用2.1 控制系统结构一般来说,PLC的输入信号有60个,输出信号为50个,根据电控系统的要求,PLC的保护模块和控制模块连接、传感设备和开关设备连接作为信号输出装置,PLC再与控制继电器、输出继电器、信号回路、控制回路、高压换向器等连接,从而实现提升机的各项参数、信号都在PLC的监控范围内。
基于PLC的矿井提升机控制系统设计解读
1 前言1.1 提升机的发展过程及现状向矿井提升机是铁矿安全生产的关键设备之一,其作用是提升矿粉、升降人员和下放物料等,在整个铁矿生产中占有十分重要的地位。
矿井提升机安全、可靠、高效、准确地运行集中体现在其电气控制系统中,电控系统性能的优劣直接影响全矿的安全生产及矿工生命的安全。
现代矿井提升机的发展与现代电力传动及其控制技术的发展密切相关。
根据受控电动机类型的不同,矿井提升机可分为直流驱动提升机和交流驱动提升机两大类。
由于交流电动机有结构简单、紧凑、坚固、容量大、价格低廉、应用场合广泛和直接使用交流三相电源等优点,因而交流驱动提升机得到了广泛的应用。
在20世纪70年代前,矿井提升机大多采用交流驱动系统,但是由于其调速能力较差,很难适用于调速性能要求较高的场合。
直流电动机具有良好的启、制动性能,可在大范围内平滑调速,调速性能指标远优于交流电动机,因此在20世纪70年代后,随着大功率可控硅的使用、电子控制技术和装置的发展,直流驱动提升机逐渐在大中型铁矿中占据了主导地位。
随着电力电子器件、微电子控制技术和交流调速控制理论的发展,交流驱动逐渐获得了与直流驱动相同的控制特性,并在高性能交流驱动应用中获得了根本性的突破,成为大容量提升机的首选方案。
目前国内铁矿企业,井下提升机大多采用交流绕线式异步电动机转子串电阻的调速方案。
提升机电控系统经历了由继电器控制、分离元件控制、模拟电路控制到微电子(计算机)控制的发展历程,目前数字控制系统已广泛应用于提升机控制系统中。
采用数字控制技术后,提升机电控系统具有结构简单、控制精度高、系统功能开发简单等优点;特别是其具有智能化的信息采集、故障诊断和在线检测等功能,极大地提高了系统的可靠性,缩短了查找和排除故障的时间,降低了维护成本。
1.2 主要存在的问题虽然交流提升机在调速性能上获得了根本性的突破,成为大容量提升机的首选方案,但是由交流电动机的基本原理可知,由定子传入转子的电磁功率Pm可分为两部分:一部分是驱动负载的有效功率P=(1-s)Pm;另一部分是转差功率P=sPm,与转差率s成正比。
矿井提升机PLC电控系统技术改造浅析
控制 ; 操作 系统为西 门子公 司 s 7—30双 P C控 0 L 制 ; 控 系统 为 品牌 电脑 , 液 晶 显示 器 , 光 打 印 监 含 激 机 , 讯 网卡 ; 通 闸控 系统 采用 德 国原装 进 口西玛 格液 压站 , 于对 液 压 盘 形 制 动 器 进 行 调 整 、 制 与监 用 控 测 ; 号 系统 为西 门子公 司 E 20 远程 IO控制 , 信 T0M /
统 、 位 监控 系统 、 上 闸控 系统 、 号 系统 。各 子 系 统 信 之 间通 过 P O I U R FB S~D P网 络 和 MP 完 成 数 据 交 I
制部分存在着诸多不确定的因素 , 不利于设备安全
可 靠运 行 , 重影 响提 升机 的正常运 转 。 严
换 。调 速系 统 为 西 门子公 司 原 装 6 A 0全 数 字 直 R7 流 调速 装置 , 现磁 场 恒 定 、 实 电枢 换 向并 联 1 动 2脉
通用 的 自动 控 制 装 置 。其 工 作 原 理 为 : 用 2套 采
P C互为冗 余 的控制方 式 , L 2套 同时运行 , 互为监 测 , 时采集 数据 进 行 比较 。行 程 测 量 采 用 3个 光 同
电编 码 器输 出 的数 字 脉 冲与主 电机 的转 速成 正 比进 行数 据 比较 与行 程监 测 , 速度 闭环 控 制 提 供 反馈 为
2 P C电控 系统 的应用 L
2 1 P C电控 系统原 理 . L 根据 现场 实 际情况 及 微机保 护 逐渐 投 入 电力系
统控 制 , P C控 制技 术 替 代 继 电器 控 制 是 确保 提 用 L 升机 安 全运 行 的 有 效 途 径 之 一 。 选 用 P C控 制 模 L
基于PLC的矿井提升机控制系统

摘要矿井被称作地下矿井系统的咽喉,是井下与地面最重要的通道.矿井提升机承担着矿井与井下人员、矿料、设备等物资运输的重任,是整个矿井系统中的核心部分,矿井提升机的安全可靠运行至关重要。
所以设计一套安全可靠的矿井提升机控制系统具有极大的意义.PLC出现后以其显著优点迅速成为工业生产控制系统的主流发展方向,其可靠性高,抗干扰能力强;编程简单,使用方便;控制程序可变,具有很好的柔性功能完善;扩充方便,组合灵活,极大减少控制系统设计及施工工作量;体积小,重量轻;非常适用“机电一体化"设备。
基于PLC设计矿井提升机控制系统,极大满足对大型机械控制安全与可靠性的要求,且节能环保,便于操作与维护。
关键词:矿井提升机;PLC;控制系统.AbstractThe mine is called the throat of the underground mine, which is the most important channel of the underground mine。
The mine hoist bears the heavy responsibility of the mine and the underground personnel,the ore material,equipment and so on。
It is the core part of the entire mine system,and the safe and reliable operation of the mine hoist is very important。
Therefore, it is of great significance to design a safe and reliable control system of mine hoist。
PLC appears with its remarkable advantages quickly become industrial production control system of the mainstream of the development direction of, the high reliability, strong anti—interference ability; programming is simple, easy to use;variable control procedures,with perfect good flexible function;to facilitate the expansion,flexiblecombination,greatly reducing the control system design and construction work;has the advantages of small volume, light weight;very applicable electromechanical integration equipment。
矿井提升机PLC过程控制系统浅述

霉
图 1 P C 过 程 控 制 系 统 图 L
中小型 P C, L 能满足 中等性 能的控制要 求。一般 由 C U模块 、 P 负
载 电源模块 ( S 、 口模块(M) 信号模块 (M)功能模块 ( M) 4 P C过 程控 制 系统 的功 能 P )接 I 、 S 、 F L 以及通讯处理模块 ( P 组成 _ 。 C) 4 J 任何控制 系统功能 的实 现过程 其实 质也 是系 统对信 息 的处 各模块 都通过背板总线连 接 , 户可根据 系统 的具体情况选 理过程 , 用 如图 1 所示 的 P C过程控制 系统图正显示了这一处理过 L 择合适 的模块 , 简单 实 用 的分 布式 结构 和 强 大 的通讯 联 网 能 程 , 其 通过对现场和提升 机设 备信 号 的处 理 , L P C系 统输 出相应 的 力, 使其应用十分灵活 。 控制信 号以实现其控制功能 。根据整个 系统要求 ,L P C系统应 具
计算 、 减速 、 爬行 、 液压 制动和停车 , 实现全数 字行程控 制 , 能监 并 控 整个提升机 的运行状况 , 进行故 障 自诊 断和相应 处理。
3 3 驱 动 模 式 .
P C控制 系统有全 桥 、 1 载和桥 2半载 三种驱动 模式 以 L 桥 半 控 制提升机在相应状态下工作 。事实上 , 上述分类 只是从 静态的
融 和互 为条件的 , 在任何一 种工作和运行 模式下都 有三种驱 动模
式 , 之亦然 。 反
高低压供 电系统状态信 息 司机 台输入信息 提升机设备状态输入信 息 控 制系 统l 液压闸 系统输入信息 系统 PCl L 液压闸系统输出信息 车场输入信息 传动PCI L H配 瞳
对罐等特殊运 行要 求 的情况 , 其相 应 的基 本安 全监 控功 但 用户编制的程序 对上述信号和数据 的处 理 , 提升 机罐笼运行 实 检修 、 使 能仍 由系统 自动 实现 , 而其 安全性 依然 可靠 。在 自动 模式 下 , 故 现全数 字行 程控 制和 s型运行 曲线 , 并从 软件上对各 种信号 实现 司机 只需根据信 号系统 发出的开 车请求信 多重联锁 和安全保 护[ 整 个提 升机 系统进 行 实时监 控 , , 既保 证 当提升机允许开车时 , 号给定 开车信号 , L P C控制 系统 自动判 别方 向 、 开车 、 速 、 加 行程 了整个系统安全可靠的运行 , 又大大提高 了其工作效率 。
可编程控制器(PLC)在矿井提升机中的运用
行数据线送到上位监控计算机中,通过计算机监控软
件 的实时处 理 ,在显示 器上 显示 系统 的实 时工作 状态
和实时速度 曲线 ,上位监控部分可以记录和保存提升 [ ] 志敏 , 1周 纪爱华 . 可编程 序控制器实用技 术问答 , 电子 机运 行 的各 种参数 ,提 升系 统 出现故 障时可 以查询 系 工业 出版 社 ,06 20.
图 1 所示
据, 在操作台上实时显示系统的工作状态 , 容器的实时位
置和深度 。
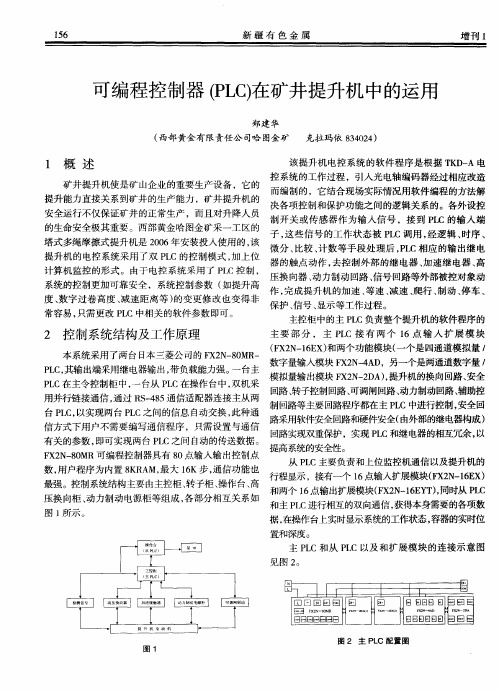
主 P C和从 P C以及 和扩 展 模块 的连 接示 意 图 L L
见图 2
图 2 主 P C 配 置 图 L 图 1
2 1 钲 01
新 疆 有 色 金 属
曰 曰
17 5
( 控制系统在硬件上采取了光电隔离 、 2 ) 继电器输
16 5
新 疆 有 色 金 属
增刊 I
可 编程控制器 (L ) P C在矿井提升机 中的运用
郑建 华
( 西部黄金有限责任公 司哈 图金矿 克拉玛依 842 ) 304
1 概 述
矿井 提升 机使是 矿 山企 业 的重要 生产设备 ,它 的
提 升能力 直接关 系到 矿井 的生产 能力 ,矿井提 升机 的
该 提升 机 电控 系统 的软件 程 序是 根 据 T D A电 K — 控 系统 的工作过 程 ,引入光 电轴编 码器经 过相应 改造
而编制的,它结合现场实际情况用软件编程的方法解
决各 项控 制和保 护功 能之 间的逻辑 关系 的。各外设 控
安全运行不仅保证矿井的正常生产,而且对升降人员
作, 完成 提 升机 的加 速 、 等速 、 速 、 行 、 动 、 车 、 减 爬 制 停 保护 、 信号 、 显示 等工作 过程 。
基于PLC矿井提升机控制系统设计
PLC智能控制系统的优势
5、便于维护:PLC智能控制系统具有较小的体积和较轻的重量,安装和维护 较为方便,同时具有自我诊断和故障修复功能,能够减少维护工作量和维修成本。
四、系统测试与评估
最后,在系统正式投入使用后,应持续对控制系统的运行情况进行监控和维 护,及时处理潜在的问题和故障,确保控制系统的稳定性和可靠性。
五、总结与展望
五、总结与展望
基于PLC的矿井提升机控制系统在设计、实现和测试过程中,都取得了较好的 结果。通过合理选择硬件设备和优化软件算法,控制系统在提升机的安全性和可 靠性方面得到了显著提高。严格的测试与评估为控制系统的稳定运行提供了有力 保障。
在硬件实现方面,选择具有较高可靠性和稳定性的PLC控制器,如Siemens S7系列或Rockwell AB系列。输入输出模块根据实际需要选择相应的型号,以满 足信号类型和电压等级的要求。通信模块可采用以太网或RS485串口通信方式, 具体取决于上位机和其他设备的通信协议。执行器则根据控制信号的特性选择合 适的电液比例阀或变频器等设备。
三、系统实现
在软件实现方面,采用模块化编程方法,将控制算法、故障诊断和安全保护 等功能划分为不同的模块,便于维护和升级。同时,使用实时数据库技术,实现 数据共享和交互,提高整个控制系统的响应速度和稳定性。
四、系统测试与评估
四、系统测试与评估
为了确保基于PLC的矿井提升机控制系统的稳定性和可靠性,需要进行严格的 测试与评估。
五、总结与展望
然而,随着矿山生产技术的不断发展和自动化水平的提高,基于PLC的矿井提 升机控制系统仍有许多可以改进和完善的地方。例如,可以引入更多智能控制算 法,如神经网络、模糊控制等,以提高控制系统的复杂度和适应性。加强与上位 机等其他设备的通信协议和数据交互,实现提升机控制系统的远程监控和故障诊 断,提高
三菱PLC在矿井提升机电控系统中的应用

阻 实 现 对 启动 电 流 、 启动 转 矩 以 及 转 速 的
三 菱PL 是 中 国内 地 销 量 最 多 的 小 型 控 制 。 C 考虑 到 井 下 环 境 比较 复杂 , 息 传送 信 P C, 用最 多的 是F 2 L 应 X N系列 , 系 列具 有 过 程 中 干扰 因 素 较 多 , 控 显 示 系统 与主 该 监 P I 协议 , 讯 方 式采 用 串行通 通 殊 功 能 模 块 等 特 点 , 工 厂 自动 化 应 用 提 议采 用TC / P 为
垫
Sc e i nce and Te chn o Inova on ol gy n ti Her l ad
Q: 塑
工 业 技 术
三菱 PL C在矿 井 提升机 电控 系统 中的应 用
王 昆
( 徐州工 程机械 高级技 工学校 江苏 徐州 2 1 0 ) 2 0 0
摘 要: 传统 的交流提升机 电控 系统蛆 成复杂 , 矿井生 产中 因电 气线路故 障导致停 产的事故时有 发生。 为了更 好的解决此 类问题 , 可以建 立 基于三 菱P C L 的新 型矿 井提 升机 电控 系统 。 系统 灵 活性 强 , 制功 能 多, 该 控 其可 扩充性 , 可变性 , 艺指标较 传统 的 电控 系统 都 有较 工
便 、 行 稳 定 可 靠 , 大 提 高 了 提升 机 运 行 作 人 员 尽 快 熟 悉新 系 统 的 操 作 过 程 , 压 在 组 成 结 构 上 有 了很 大 简 化 , 且 灵 活 性 运 大 高 而 的安 全 性 , 少 了维 护 工作 量 , 且缩 短 了 减 并 种 新 型 的 电控 系统 已成 为 矿 井 提 升机 自动
大提 高 。 。
关键 词 : 矿井提 升机 电控 系统 三菱P C L 中 图分 类 号 : D 3 T 5 文 献标 识 码 : A
基于PLC的矿井提升机电控系统研究
基于PLC的矿井提升机电控系统研究1. 引言1.1 研究背景矿井提升机作为矿山生产中的重要设备,其电控系统的稳定性和安全性对矿山生产起着至关重要的作用。
传统的矿井提升机电控系统存在着操作复杂、维护困难、故障率高等问题,严重影响了生产效率和安全性。
随着工业自动化技术的发展,基于PLC的矿井提升机电控系统逐渐成为研究的热点。
PLC具有可编程、灵活性强、可靠性高等优势,能够实现对提升机的精确控制和实时监测,提高了提升机的运行效率和安全性。
目前国内外对基于PLC的矿井提升机电控系统的研究还比较有限,尤其是在系统设计方案和效果分析方面存在较大的空白。
对于基于PLC的矿井提升机电控系统的研究具有重要的实践意义和指导意义。
通过本文对矿井提升机电控系统的研究,可以提高矿山生产的效率和安全性,推动矿山智能化技术的发展,为矿山生产带来更加可靠和高效的解决方案。
1.2 研究意义矿井提升机在矿山生产中起着至关重要的作用,其电控系统的性能稳定性和可靠性直接影响到生产效率和安全性。
本研究旨在通过引入PLC技术,提高矿井提升机电控系统的自动化水平和智能化程度,解决传统电气控制系统存在的问题,提升提升机运行的安全性和稳定性。
通过基于PLC构建的矿井提升机电控系统,可以实现各种复杂的控制功能,提高系统的响应速度和准确度,降低系统的故障率和维护成本。
PLC技术具有模块化、可编程性强和易于扩展的特点,便于系统的升级和优化,适应矿井提升机在实际生产中的不断变化需求。
研究基于PLC的矿井提升机电控系统不仅可以提高矿井提升机的运行效率和安全性,还可以为相关领域的研究和工程应用提供参考和借鉴。
通过本研究的深入探索和实践,可以进一步推动我国在矿山机电控制领域的发展和创新,提升我国矿山生产的技术水平和竞争力。
1.3 国内外研究现状在国内外,矿井提升机电控系统的研究已经取得了一些重要进展。
国内研究方面,目前主要集中在提升机的控制策略和系统设计上。
PLC在矿井提升机控制系统中的应用

Internal Combustion Engine &Parts0引言近些年我国计算机技术快速发展与进步,计算机技术与工业融合已成为趋势。
矿井提升机控制中运用新型技术PLC ,实践表明可以提升产生效力,降低人工成本,改善传统生产时存在的缺陷。
分析矿井提升机控制系统中运用PLC 技术的措施,本文就此展开论述。
1PLC 技术特点分析PLC 技术具有其本体的技术特点,将其与计算机技术相结合可以在最大程度上发挥出机电一体化的功能。
如今伴随着我国机电一体化水平的不断提高,对其产品储存量与计算速度的要求也越来越高。
PLC 技术的应用便可以很好的解决这一问题,为人们生产生活提供了方便。
相对于其他技术在应用到器件设备中具有更加优质的抗干扰性能。
通过对现有的PLC 技术的应用情况以及生产水平进行研究统计,可以发现该技术中应用了大规模集成电路技术,同时大规模集成电路技术表现出极高的可靠性。
通过市场调查可以发现,日本三菱公司生产的可编程逻辑控制器在无故障的情况下可以工作较长的时间。
主要是因为在生成PLC 的过程中,使用的硬件具有自我检测功能,一旦检测到问题,可以及时进行发布警报,便于进行及时处理。
由于集成电路以及半导体材料的不断发展,芯片的集成度不断提高,同时电路元件在芯片上的集成度也不断升高。
因此PLC 产品的型号以及规模也已经发生了相当大的变化,主要体现在集成器件的功能上。
PLC 产品的功能规模相当丰富,更好地满足工业控制的各种需要。
同时器件本身具备完整的数据运算和逻辑处理功能,因此具有一定的应用优势。
2矿井提升机的类别矿井提升机在具体使用时,通过合理使用变频调速控制系统,有助于提升机工作效率与质量的提升,直接影响到设备运行的安全稳定性。
需要根据实际情况,全面掌握矿井提升机的特点。
2.1依据提升机用途分类矿山生产过程中不同提升机提着不同的用途,根据提升机用途将其分成主井与副井两类。
主井提升机主要提到开采过程中提升矿石的作用。
PLC控制系统在矿井提升中的应用
PLC控制系统在矿井提升中的应用摘要:PLC控制器简称可编程控制器,是工业现场控制时代发展的产物。
PLC在工业现场的应用解决了继电器控制的弊端,通过编程设计与硬件相结合来实现现场逻辑控制。
PLC在大型矿井提升机中的应用越来越广泛,因此研究PLC在提升机中的应用意义非常深远。
关键词:PLC 提升机全数字行程控制一、概述煤矿提升电控系统作为矿井的提升起着至关重要的要素,因此电控系统决定提升的安全运行。
淮南矿业集团朱集东矿副井电控装置采用上海华菱成套厂家的西门子S7-400+C30A双冗余控制系统,提升信号系统采西门子S7-300PLC控制。
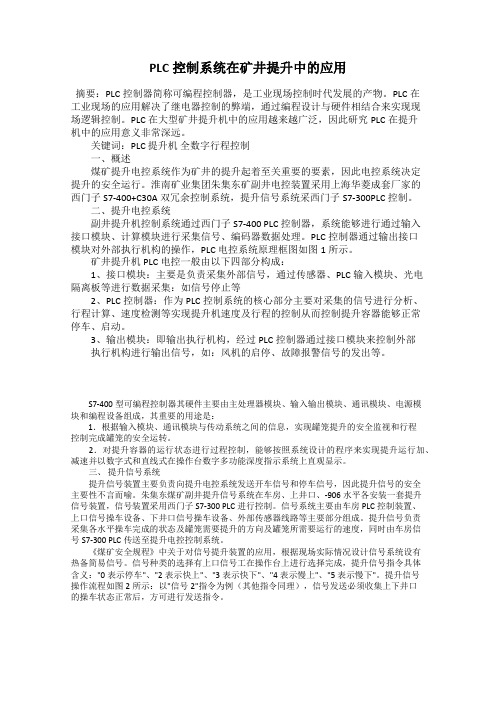
二、提升电控系统副井提升机控制系统通过西门子S7-400 PLC控制器,系统能够进行通过输入接口模块、计算模块进行采集信号、编码器数据处理。
PLC控制器通过输出接口模块对外部执行机构的操作,PLC电控系统原理框图如图1所示。
矿井提升机PLC电控一般由以下四部分构成:1、接口模块:主要是负责采集外部信号,通过传感器、PLC输入模块、光电隔离板等进行数据采集:如信号停止等2、PLC控制器:作为PLC控制系统的核心部分主要对采集的信号进行分析、行程计算、速度检测等实现提升机速度及行程的控制从而控制提升容器能够正常停车、启动。
3、输出模块:即输出执行机构,经过PLC控制器通过接口模块来控制外部执行机构进行输出信号,如:风机的启停、故障报警信号的发出等。
S7-400型可编程控制器其硬件主要由主处理器模块、输入输出模块、通讯模块、电源模块和编程设备组成,其重要的用途是:1.根据输入模块、通讯模块与传动系统之间的信息,实现罐笼提升的安全监视和行程控制完成罐笼的安全运转。
2.对提升容器的运行状态进行过程控制,能够按照系统设计的程序来实现提升运行加、减速并以数字式和直线式在操作台数字多功能深度指示系统上直观显示。
三、提升信号系统提升信号装置主要负责向提升电控系统发送开车信号和停车信号,因此提升信号的安全主要性不言而喻。
矿井提升信号系统的PLC控制

故障判断及报警程序主要是为了方便维护和提高 智能化而设计的。主要包括安全门、摇台故障的判
断,到位开关故障的判别,井口信号工操作失误判 断,急停故障判断和排除。
2.3 信号记忆和查询程序
作为副井信号,对信号工操作进行记忆存储是非 常重要的,是检查操作问题主要依据,该程序主要包 括:根据时间排序依次分类存储上、下井口发出的信 号,查询顺序按先入后出依次显示,查询时间过后自 动排除闭锁信号。
fn
gn
速度调节器 ASR 的输入偏差ΔU 马上出现一个负
值,使 A S R迅速退出饱和状态,速度环投入作用,
起动过渡过程进入第三阶段,即速度调节阶段,但
由于测速编码器反馈回来的电压U 中含有较大的交 fn
流干扰,速度调节器 ASR 的输入偏差ΔU 则始终
是波动的,表现为忽正忽负,ASR 和ACR 的输出都
难于维持在一个恒定的稳态值:当反馈电压U 大于 fn
给定电压U 时,ΔU 为一个负的偏差,ASR 的输 gn
出电压U 立即下降,电流调节器 ACR 的输出也从原 gi
来的值降下来,促使可控硅的触发电压U 下降,触 k
发控制角α
增大,变流装置输出电压U 下降,主电 d
机电流I 下降,提升机转速也下降;但当U 小于U
荡 ”状 态 。
4 解决方法
我们通过对编码器电源的波形测量发现含有 50
提
Hz的工频干扰,从而传入了反馈环节,形成了上述现
象。编码器的底座不要安装在滚筒轴承座上或电机
上,而应将编码器的底座安装固定在地板上,就可以 减少编码器的震动,从而消除高频振荡,提高反馈测
绞
量精度。
5 结束语
从这次问题分析可见,测速编码器是电源直流闭 环自动调速系统中的监测元件,它担负着速度环中检 测实际速度的任务,其输出是作为速度环的负反馈信 号,直接参与调速系统的调节与控制,对它的电源和 安装工作是非常重要的。选用抗干扰性好的稳压电源 给编码器供电。另外,在平时检查工作中一方面要保 证测速编码器的基础必须厚实牢靠,安装质量符合技 术要求,还要经常检查测速编码器与主电机或滚筒的 联接及编码器的振动情况,确保与测速轴的同心度无 偏差,保证不丢或少丢脉冲,使速度反馈电压的纹波 系数在1% 以内。另一方面要经常检查测速编码器的 所有控制线和电源线的联接是否牢固,有无松动,以 免由于接触不良,造成控制信号减弱甚至丢失。
PLC技术在煤矿提升机控制系统的应用

PLC技术在煤矿提升机控制系统的应用摘要:随着科学技术的发展,PLC技术已被广泛应用于各个领域。
煤矿矿井提升机控制系统应用PLC技术对于提升煤矿提升机控制系统的工作效率和生产安全有重要作用。
简述了PLC技术在煤矿提升机控制系统中的控制原理,结合自身的工作经验对PLC技术在煤矿提升机控制系统进行了应用设计,基于PLC技术的煤矿提升机控制系统大大提高了煤矿的生产效率。
关键词:PLC;煤矿提升机;控制系统;应用分析1 PLC技术在煤矿提升机上的应用原理PLC技术为微型计算机,能够自动控制生产工作,完成工业生产控制的微处理工作,收集并判断外部信息,给出正确的设备传输信号并执行规定动作。
随着科技的飞速发展,在工业中使用PLC技术的环境也逐渐完善。
在煤矿提升机中使用PLC技术有一定的优点,控制系统可以描绘出自主设定且执行命令时的工作曲线,还可以显示提升总次数、速度等有关信息。
当提升机系统发生故障时可以通过声音进行警报。
PLC技术使用到煤矿提升机系统的电气控制如图1。
煤矿提升机凭PLC技术可以实现微处理,收集外界信息进行逻辑判断,从而对不同设备发出正确的指令,以此来提升煤矿提升机的工作效率。
图1基于PLC的煤矿提升机电气控制原理图2煤矿提升机系统构成2.1煤矿提升机控制系统结构煤矿提升机由多个部分组成,其主要包括:电气控制系统、润滑系统、装卸系统、主传动机构、液压与制定系统、井筒运转设备、导向轮、稳罐装置。
电气控制系统是煤矿提升机的核心组成部分,是整个提升机的“大脑中枢”,即提升机控制系统。
提升机控制系统的构成非常复杂,其由许多子系统组成。
提升机控制系统的子系统主要包括:PLC控制系统、信号系统、上位机监控系统、高压设备、低压电源回路、直流回路、调节整流回路等。
该系统的详细组成如图2所示。
图2煤矿提升机控制系统组成近年来,随着PLC技术的不断发展,并且逐步应用到提升机控制系统中,提升机控制系统在机械和电气等方面都取得了巨大进步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 1 章 绪论
1.3 本文研究意义及内容
1.3.1 研究意义 矿井提升机是煤矿,铁矿及有色金属矿生产的重要设备。提升机能否安全、 可靠、有效的运行,直接关系到企业的生产安全和经济效益。虽然矿井提升系统 本身有一些安全保护措施,但是由于提升机惯性质量大、运行特性复杂、工作环 境恶劣,常造成各种机械零件和电气元件的功能失效,再加上操作者的人为过失 和对行程监测研究的局限[9],使得现有的保护措施未能达到预期的效果。 因此提升机调速控制系统的研究得到了社会各界人士的广泛关注。而矿井提 升机能否平稳、安全、可靠地运行,能否避免严重的机械磨损、防止机械冲击以 及减少机械部分维修的工作量、延长提升机械的使用寿命在很大程度上取决于电 气控制方式。随着人们对矿井提升机自动化水平、矿井提升设备提升能力要求的 提高,对电气传动方式的改进提出了更高的挑战。目前,对矿井提升机电气传动 系统的具体要求有:调速性能良好,调速精度高,能快速进行正、反转运行,具 备很快的动态响应速度,制动和定位功能准确,可靠性高等[10]。 传统提升机电控系统存在控制方式繁琐、可靠性低、调速性能差等诸多问 题。在这种情况下采用 PLC 对原有电控系统进行改造,提高整个电控系统的安 全性、控制精度及调速性能,将成为我国矿井提升机电气传动系统今后的发展趋 势。 1.3.2 研究内容 我国矿井提升机电气传动系统的改造,虽然已经取得了一些成果,但在全国 范围来看这一工作仍然任重而道远,尤其是对于那些财力和技术有限的中、小矿 井。而本课题正是对目前我国中、小矿井普遍使用的绕线式异步电动机转子串电 阻系统进行改造。 1.本课题应用可编程控制器( PLC)控制技术,在不改变原有提升机控制逻 辑的情况下,使原系统中大量的时间继电器、中间继电器等硬件设备由 PLC 软 元件实现。 2.通过 PLC 控制,完成矿井提升机从启动、加速运行、等速运行、减速、 低爬和停车的控制,对 PLC 速度控制进行改进,并将智能控制应用于提升机的 制动系统和调整系统之间的协调控制。 3.进一步完善提升机后备保护功能,保证提升机运行的安全可靠。
KEY WORDS: Mine Hoister, PLC, Electric Control System, Fuzzy Control Dissertation Type: Applied Research
II
第 1 章 绪论
第1章 绪论
1.1 课题来源
矿井提升机是机、电、液一体化大型机械,它是连接井底与井口的惟一通 道,被称为矿井的“咽喉”[1]。提升机在运行过程中,电动机频繁正反向运转, 经常处于电动和制动状态的转换过程中,其控制性能的好坏、控制系统的安全可 靠性,直接关系到煤矿工作者的人身安全。目前,我国绝大部分矿井提升机采用 继电器—接触器构成的逻辑控制系统,其接触点多,故障点多,安全性和可维护 性差。因此,对现有提升机进行改造,提高其安全可靠性,是非常必要的。 江西煤炭产量只占全国煤炭产量的很小一部分,但江西中小煤矿矿井众多, 分布分散。江西萍乡煤矿安全检查站在多年对矿井提升机安全进行检测的过程 中,发现原有矿井提升系统故障率高且故障不好排查,检测工作量大、生产效率 低、极易出现操作事故。故提出对原矿井继电器—接触器系统进行改造。
关 键 词:矿井提升机,PLC,电控系统,模糊控制 论文类型:应用研究
I
摘要
Subject: The Intelligent Control System Research of Mine Hoist Specialty: Mechanical Manufacture and Automation Name: Shi Lei Supervisor: Zhang Luoping
1.2ቤተ መጻሕፍቲ ባይዱ国内外矿井提升机发展状况
1.2.1 国外矿井提升机发展状况 国外矿井提升机无论是机械部分还是电气部分,近三十年来都得到了飞速的 发展。提升机机械部分由电动机通过减速机传动卷筒,发展到直流慢速电动机和 直流电动机悬壁安装直接传动的提升机。七十年代西门子发明矢量控制的交— 直—交变频控制装置后,标志着可以用同步电动机来代替直流电机实现调速的时 代已经到来[5]。1988 年 9 月 MANGHH 和西门子共同研制成功了世界上第一台同步 电机传动提升机(内装电机式提升机)。 随着电子技术和计算机技术的发展,国外提升机电控系统也发生着日新月异 的变化。早在上世纪七八十年代,可编程控制器(PLC)和计算机就相继被应用 于矿井提升机的控制和监视[6]。PLC 和计算机的应用,使提升机的自动化水平、 操作性能、生产效率、安全可靠性都达到了一个新的高度。与此同时,西门子、 ALSTHOM 等提升机制造公司,都利用新的技术和装备,开发或完善了安全保护和 监控装置,从而使安全保护性能又有了新的提高[7]。而今,交流变频同步机拖动 调速系统因其提升容量大、功率因数高、调速范围宽等特点,正成为大型矿井提 升机提升系统的新宠[8]。
1
河南科技大学硕士学位论文
1.2.2 国内矿井提升机发展状况 交流绕线式异步电动机转子串电阻调速系统在我国现有的矿井提升机系统中 占绝大多数。常见的有 TKD 电控系统,TKDG 电控系统及 JKMK/J 电控系统。 其中 TKD、TKDG 电控系统用于单绳缠绕式提升机,JKMK/J 电控系统用于多绳 摩擦式提升机。直流电动机传动系统在我国常用的有发电机—电动机直流电力拖 动系统和可控硅变流器—电动机直流电力拖动系统。近年来我国陆续引进了几套 交—交变频交流传动系统,并在逐步对其实现国产化[2]。 1.交流绕线式异步电动机转子串电阻系统 该系统在 70 年代以前就已开始使用。经过 40 余年的发展,我国中小矿山现 在绝大部分都采用该控制系统。其特点为矿井提升机采用绕线式异步电机,通过 控制转子外串电阻的通、断级数进行调速,具有价格低、控制简单等优点[3]。它 也存在以下几个方面的问题:第一、调速方式为分级调速,在调速过程中所设计 的加减速度为一个平均值,实际调速过程中的加减速是个上下波动的变化值。因 而调速性能差,且级数分得越少,上下波动范围就越大,目前 TKD-A 系统常 用的级数为 8 级和 10 级调速。第二、在调速时以电机转差功率的降低为代价, 在转子电阻上消耗了大量的电能,能源利用率低。第三、从使用上讲,目前 TKD 系列及 JKMK 系列的电控系统的调速原则是以电流为主、时间为辅的加速 控制原则,其工作参数一经安装调试,就基本保持不变。虽然在系统中增加了速 度闭环控制回路,但是系统调节能力有限,动态响应性差的问题并没有根本改 变。特别是在提升工况多,速度变化范围大的大型矿井的副井提升系统,这种控 制原则无法满足实际生产的需要,往往只能依靠操作司机人为的调节。第四、该 调速控制电路复杂,接触器、时间继电器、中间继电器等触点众多,给设备的安 全可靠性和可维护性带来了很大麻烦。 近年来,变频调速技术正逐步被应用于矿井提升机调速系统的改造,由于是 对转子串电阻调速方式根本性的改变,采用该技术就从根本上杜绝了转子串电阻 所造成的能耗问题。 2.直流电动机传动系统 我国的矿井提升机一般在主提升电动机功率较大(1000KW 以上)或者对提 升机调速性能要求较高的情况下才选用该传动系统。目前,该传动系统在我国矿 井提升系统中占的比重约为 10%。虽然应用的较少,但无论是发电机—电动机 传动系统,还是晶闸管整流供电系统的静、动态特性和实现自动化方面均明显的 优于交流电动机转子串电阻系统[4]。
ABSTRACT
Mine hoister is one of the main equipment in mine. It conveys not only mineral but also miners. So the performance of mine hoister is concerned with hundreds of miners’ lives. At present, the mine hoisting equipment in China are mainly rest on the TDK electric control which is used in 1960s and 1970s. Although interrelated renovations have been done in recent years, essentially it is still the contact control system which is made up of the contactor-relay, tachogenerator, etc. The hardware wring system of the contact control system is complex and has high hazard rate. During the renovation of this mine hoister system, the PLC is applied to the control system, and plentiful soft components of the PLC are applied to replace the contactor and relay of the original electric control system to remould the PLC control system. Combining with the features of PLC, the dual redundant of the safety circuit is achieved. S velocity curve is used to improve the present five-stage velocity diagram, avoiding oversized change of acceleration and realizing the smooth transition of original velocity diagram. The fuzzy control arithmetic is introduced to the mine hoister system, employing fuzzy-PID control strategy to achieve coordination control between braking system and velocity control system, to make the control system works safely and placidly. Live-debugging and operating indicate that this system operates steadily and reliably, the control accuracy is high, the operation is simple and it can totally satisfy the needs of actual mineral production.