Moving Grid Filter in Hybrid Local Positioning
腾讯信鸽海量移动推送服务构建
甘恒通腾讯TEG数据平台部高级工程师甘恒通。
•推送系统建设•终端•后台•云化治理移动推送服务概览实时效果跟踪、多维运营分析终端灰度可运营共享Service推送SaaS 检索推送路由基础设施全球网络自建DNS统一接入增值服务用户分群精准推送场景推送泛推送再营销NSPBSC PCUPS 域核心网SGSNGGSN推送服务SaaS厂商通道正效果负效果打开应用关闭通知应用卸载展示点击App 粒度云端调度配置下发控制指令热更新通道切换基础服务质量监控SDK 质量网络服务质量功能模块基础组件云控模块质量监控安全审计网络存储设备识别效果统计消息管理通道集成App1SDKApp2SDK通知栏1通知栏2Shared Service运营平台复现告警监控告警报告订阅符号表管理云控系统Access 统一接入层细分领域JSCocos2dX Unity LURAndroidNative JavaiOSObject-c Swift实时处理ElasticSearch全文检索聚合统计实时计算堆栈还原iOS 系统符号表ESPESAESC数据网关数据服务crash 质量分析报告质量波动预警在线修复监控告警报表呈现实时检索堆栈还原Crash 上报数据挖掘智能专家crash 聚类质量预警众包生态批量处理TDBank 消息中间件MR(离线备用方案)Spark Streaming HDFSRedisPGX云控路由规则App设备ID云端指令配置下发热更新Filter 组件SDK智能终端共享通道协议加密智能选路灰度调度柔性策略一键诊断AccessLayer (实时通道)Docker 云化、GAIA 资源调度TDW 分布式存储Storm & Hermes 分布式计算、实时检索PushLogic离线消息Service设备识别会话路由通道维持云控数据加密防刷控制消息过滤消息网关应用后台微信后台消息中间件T A 数据分析平台自助接入灰度拨测配置管理指标监控运营分析分群画像业务自有运营平台消息排期任务调度消息审计消息推送状态维护账号设备TAG 检索账号映射会路由话效果跟踪检索位图版本兼容私有协议实时消息PUSH配置、指令下发离线拉取消息推送数据订阅全推标签用户分群token 单推token列表推账号单推账号列表推任务调度人群筛选通道路由推送代理实时统计云化治理监控告警小米华为魅族FCM APNs otherRCA缓存异步处理就近接入读写分离...DevOps配置中心日志中心...Bits1TaskSchedulerBits01BitsNAppID:212234Region: TJRegion: SZBits01BitsNBits00BitsN通道: 小米Bits00BitsN 通道: 华为Bits00BitsN小米通道华为通道天津(TJ)Region深圳(SZ)Region小米手机华为手机TJ device SZ device SZ deviceAccessAccessSetLogic SetLogic 通道隔离调度分级Gender :Male Bits00BitsN110101101001111101011RuleAngine查询排期调度路由查询需推送设备任务、数据分割准备申请资源、调度执行选择通道推送推送消费队列、触达用户Message Queue logic offlinelogic realtimeaccesslogic pushcache managercacheCKVtag bitmapupdate cacheupdate cachereadreadL5 consistent hash basesd GUID sliceL5 consistent hashbasesd GUID slicedevicepush messageregister informationGUID -> device info:{ip:port ...}batch pushTGWHttp DNSTDBankSpoutBolt1Bolt2BoltNRule CenterCKVMater SlaveSlave320 bit 1 bit 空间分区管理[ 0, N )[0, 64K)BASE :1 * 64K[0, 64K)B :(N –1)* 64K[0, 64K)…Bits0Bits1BitsNBits0Bits1BitsNBits0Bits1BitsNSET 0SET 1SET N容灾扩容高效Query语义解析AST Response索引节点增量索引/数据切片Map Reduce检索节点HBase用户画像设备画像曝光点击HDFS正、倒排索引索引切片索引切片SparkStreamingStormSpoutBoltBoltRule CentralMR Task Map ReduceAggrateNodePullNode ClusterAggrateNode Bitmap OP Bitmap RuleAND, OR, NOTSET:∩、U、∉transfer toKnowlage Grid………离线数据离线数据数据在线数据ExecuteEngine用户、设备画像数据存储、计算资源任务调度多维实时分析提取指标报表呈现分级数据接入公共集群OMG 独立集群手空独立集群IEG 独立集群运营平台原生AppH5智能硬件小程序GW ServiceAccessLayerDomainLogic 自定义计算事件上卷下钻协议适配数据对账事件驱动计算订阅发布通用算子层(count 、sum)SQL 化操作实时计算离线计算HDFS HBase TDW Hermes业务指标自定义计算监控告警消息订阅资源管理数据对账ANTLR MR Plan ExecuteGAIA 资源调度& Lhotse 任务调度资源调度虚拟云化共享隔离成本核算工作流ESA ESPStormTRCSparkHadoop关键指标画像分析TDBank消息中间件GAIA STACK配置中心服务发现负载均衡DevOpsdocker imagerepository配置管理任务管理Service AgentMaster共享内存•增值服务•精准推送•数据•支撑平台•可视化操作标签推送A/B 推送用户分群推送智能精准推送规则引擎协同过滤预估模型深度学习在线学习迁移学习MLRRFCFGDBTFTLR数据P u x i w i算法选择•目标•场景模型训练•样本•特征•FTRL模型评估•AUC•准确率•召回率预测•单模型•混合模型•迁移学习效果统计•CTR•A/B TestTDBankDATA API界面化、可视化算法应用平台CKV 系统实时计算离线计算资源、任务调度CPU 集群GPU 集群Storage业务在线系统任务调度/工作流IDE黄金眼Tesla图像处理多维实时检索Hermes TDEDMPLookAlikeAI &BI NLP OCRMR 精准推荐FTRL LR TRC机器学习Angel (参数服务)MarianaGaiaStack 、LhostHDFS CEPH自建通道场景营销厂商通道APNS FCM 小米通道华为通道魅族通道Android iOS 智能硬件物联网公共组件基础平台工具通道隔离A/B Test 推送标签定向推送推送效果再营销MTA 用户分群、事件数据互通泛推送公众号短信行为场景推送分级推送调度平台共赢地理围栏推送分布式检索推送Gateway 数据开放平台对接运营平台立体化监控数据透视画像分析抵达时效精准实时效果跟踪智能选路预推送行业热词模版配置管理Angel 云控系统GaiaTDW/Storm 位图标签系统全局ID 分配多维实时检索限频安全旁路C K V知识发现用户聚类社群挖掘模型算法流失预测FTRL用户流失归因分析官方打击外挂被人PVP 骚扰和帮会成员缺乏交流沟通太和平没有冲突、挑战错误的加点方式PVP 活动被大帮派垄断,没有对抗的资本PVP 打不过对手,有挫败感升级时获得收益不足暂离后和他人差距大,发生挫败客观原因无法登陆游戏和付费玩家差距过大,失去动力玩法需要时间太多,持续在线PVP成长障碍游戏负担用户分群消息精准推送我有残局,你敢来挑战吗?缺少挑战PVP失利生日独享大礼包用户属性效率成本增值易用KP (开放生态、平台合作)Customer SegmentsKR Key ActivitiesCrash 监控用户分群精准推送可视化埋点渠道跟踪反作弊移动开发者移动运营者Nielsen媒体大数据从业者微信开放平台腾讯云腾讯开放平台应用宝APICloud易起秀用户、设备画像大数据解决方案流量资本协同营销ValuePropositionSaaS AI BI。
与电子行业相关的工程师必须了解的英语词汇

1 backplane 背板2 Band gap voltage reference 带隙电压参考3 benchtop supply 工作台电源4 Block Diagram 方块图5 Bode Plot 波特图6 Bootstrap 自举7 Bottom FET Bottom FET8 bucket capcitor 桶形电容9 chassis 机架10 Combi-sense Combi-sense11 constant current source 恒流源12 Core Sataration 铁芯饱和13 crossover frequency 交叉频率14 current ripple 纹波电流15 Cycle by Cycle 逐周期16 cycle skipping 周期跳步17 Dead Time 死区时间18 DIE Temperature 核心温度19 Disable 非使能,无效,禁用,关断20 dominant pole 主极点21 Enable 使能,有效,启用22 ESD Rating ESD额定值23 Evaluation Board 评估板24 Exceeding the specifications below may result in permanent damage to the device, or device malfunction. Operation outside of the parameters specified in the Electrical Characteristics section is not implied. 超过下面的规格使用可能引起永久的设备损害或设备故障。
建议不要工作在电特性表规定的参数范围以外。
25 Failling edge 下降沿26 figure of merit 品质因数27 float charge voltage 浮充电压28 flyback power stage 反驰式功率级29 forward voltage drop 前向压降30 free-running 自由运行31 Freewheel diode 续流二极管32 Full load 满负载33 gate drive 栅极驱动34 gate drive stage 栅极驱动级35 gerber plot Gerber 图36 ground plane 接地层37 Henry 电感单位:亨利38 Human Body Model 人体模式39 Hysteresis 滞回40 inrush current 涌入电流41 Inverting 反相42 jittery 抖动43 Junction 结点44 Kelvin connection 开尔文连接45 Lead Frame 引脚框架46 Lead Free 无铅47 level-shift 电平移动48 Line regulation 电源调整率49 load regulation 负载调整率50 Lot Number 批号51 Low Dropout 低压差52 Miller 密勒53 node 节点54 Non-Inverting 非反相55 novel 新颖的56 off state 关断状态57 Operating supply voltage 电源工作电压58 out drive stage 输出驱动级59 Out of Phase 异相60 Part Number 产品型号61 pass transistor pass transistor62 P-channel MOSFET P沟道MOSFET63 Phase margin 相位裕度64 Phase Node 开关节点65 portable electronics 便携式电子设备66 power down 掉电67 Power Good 电源正常68 Power Groud 功率地69 Power Save Mode 节电模式70 Power up 上电71 pull down 下拉72 pull up 上拉73 Pulse by Pulse 逐脉冲(Pulse by Pulse)74 push pull converter 推挽转换器75 ramp down 斜降76 ramp up 斜升77 redundant diode 冗余二极管78 resistive divider 电阻分压器79 ringing 振铃80 ripple current 纹波电流81 rising edge 上升沿82 sense resistor 检测电阻83 Sequenced Power Supplys 序列电源84 shoot-through 直通,同时导通85 stray inductances. 杂散电感86 sub-circuit 子电路87 substrate 基板88 Telecom 电信89 Thermal Information 热性能信息90 thermal slug 散热片91 Threshold 阈值92 timing resistor 振荡电阻93 Top FET Top FET94 Trace 线路,走线,引线95 Transfer function 传递函数96 Trip Point 跳变点97 turns ratio 匝数比,=Np / Ns。
E-车载自组网(VANET)讲解学习

10
③ C2C-CC,“ Car2Car Communication Consortium ”是由6家欧洲汽车制造商(BMW、 DaimlerChrysler、Volkswagen等)组成,目标是为 car2car 通信系统建立一个公开的欧洲标准,不同制 造商的汽车能够相互通信。Car2Car通信系统是采用 基于无线局域网 WLAN技术,确保在欧洲范围内车间 通信的正常运行。
Vehicles can find their neighbors through periodic beacon messages, which also enclose the physical location of the sender.
Vehicles are assumed to be equipped with pre-load digital maps, which provide street-level map and traffic statistics (such as traffic density and vehicle speed on roads at different times of the day)
5
6
专用短距离通信技术—DSRC,是专门为车载 通信开发的技术
7
并行重叠/变形混合网格生成技术及其应用

第4卷㊀第6期2019年11月气体物理PHYSICSOFGASESVol.4㊀No.6Nov.2019收稿日期 2019⁃06⁃04 修回日期 2019⁃08⁃21基金项目 国家重点研发计划(2016YFB0200701) 国家自然科学基金(11532016 11672324)第一作者简介 常兴华(1982⁃)㊀男 博士 副研究员 主要研究方向为动态混合网格生成技术㊁非定常数值计算方法㊁数值虚拟飞行.E⁃mail cxh_cardc@126.com通信作者简介 张来平(1968⁃)㊀男 博导 研究员 研究方向为非结构网格生成方法㊁非结构网格高精度数值模拟方法㊁数值虚拟飞行.E⁃mail zhanglp_cardc@126.com㊀㊀DOI 10.19527/j.cnki.2096⁃1642.0760并行重叠/变形混合网格生成技术及其应用常兴华1 2 ㊀王年华1 2 ㊀马㊀戎2 ㊀田润雨3 ㊀张来平1 2(1.中国空气动力研究与发展中心空气动力学国家重点实验室 四川绵阳621000 2.中国空气动力研究与发展中心计算空气动力研究所 四川绵阳6210003.中国空气动力研究与发展中心超高速空气动力研究所 四川绵阳621000)DynamicHybridMeshGeneratorCoupledwithOversetandDeformationinParallelEnvironmentCHANGXing⁃hua1 2 ㊀WANGNian⁃hua1 2 ㊀MARong2 ㊀TIANRun⁃yu3 ZHANGLai⁃ping1 2(1.StateKeyLaboratoryofAerodynamics ChinaAerodynamicsResearchandDevelopmentCenter Mianyang621000 China 2.ComputationalAerodynamicsInstitute ChinaAerodynamicsResearchandDevelopmentCenter Mianyang621000 China 3.HypervelocityAerodynamicsInstitute ChinaAerodynamicsResearchandDevelopmentCenter Mianyang621000 China)摘㊀要 为了适用于柔性变形㊁相对运动等复杂动边界问题 建立了并行环境下重叠和变形相结合的动态混合网格生成技术.通过计算区域分解以及分布式并行实现了重叠和变形技术的结合 其中重叠网格采用了并行化的隐式装配方法 并发展了两种并行化查询策略.变形网格则采用了并行化的径向基函数(RBF)插值方法.并行化动态网格生成方法大幅提高了动态网格生成效率 有利于处理大规模的动边界问题.在此基础上 发展了基于变形/重叠动态混合网格的流动/运动/控制一体化数值模拟方法 进一步改进了耦合模拟软件平台 HyperFLOW.典型应用算例证明了该动态混合网格技术及一体化算法的实用性.关键词 重叠网格 变形网格 并行动态网格生成 数值虚拟飞行 耦合算法㊀㊀㊀中图分类号 V211.3文献标识码 AAbstract Adeforming/oversetcoupledhybridmovinggridgenerationmethodwasdevelopedinparallelenvironmenttodealwithcomplexengineeringproblemsofbothboundarydeformationandrelativemovement.Thecoupledmethodisbasedonadomaindecompositionstrategyanddistributedparallelprocess.Theparallelimplicit⁃hole⁃cuttingmethodbasedontheminimumdistancetowallisadopted andtwoparalleldonorcellsearchingmethodshavebeendeveloped.Theinterpolationmethodbasedonparallelradialbasisfunction(RBF)isadoptedformeshdeformation.Basedonthecoupledhybridmovinggrids thenumericalvirtualflightsolver HyperFLOW wasimproved.ThecoupledsimulationsystemintegratestheparallelunsteadyRANSsolveronthedeforming/oversetmovinggrids sixdegreesoffreedom(6DOF)motionsolver andflightcontrolsystem.Sometypicalapplicationsdemonstratethecapabilityofpresentmethod.Keywords oversetmesh deformingmesh parallelmovinggridgeneration numericalvirtualflight couplingmethod引㊀言在计算流体力学应用中经常会遇到包含运动边界的流动问题 例如复杂多体分离㊁飞行器机动飞行㊁直升机旋翼运动㊁风力机叶片旋转㊁鸟类/昆虫/鱼类等生物体柔性运动等.针对此类问题开展数值模拟 首先需要解决运动边界条件下的动态网第6期常兴华等并行重叠/变形混合网格生成技术及其应用格生成问题.此外由于此类包含运动边界的流动问题往往是一个多学科耦合问题因此还要发展和动态网格技术相匹配的非定常流动数值模拟方法以及多学科耦合求解算法以满足工程应用的需求.常见的处理运动边界问题的方法有动态重叠网格技术[1]㊁变形网格技术[2]以及内置边界方法[3]等.重叠网格是由若干个子网格块组合形成覆盖整个计算域的网格子网格块之间通过网格装配技术建立插值关系.通过子网格块的刚性运动可以非常方便地模拟大位移㊁相对运动等问题.变形网格技术通过将边界网格的运动传递到内部网格点以生成每个时刻的动态网格其优点是可以保持网格拓扑结构的一致性且适用于柔性边界问题.内置边界方法通过在控制方程中引入模拟物理边界影响的源项降低了网格生成难度且物体运动过程中不需要对网格进行特殊处理但是其在模拟高Reynolds数可压缩流问题时精度仍有待提高.随着CFD所模拟的工程问题越来越复杂多学科耦合㊁精细化数值模拟等都对数值计算方法尤其是网格生成技术提出了更高要求.为了更好地解决柔性变形㊁相对运动㊁大位移运动相互耦合的复杂工程问题重叠网格技术和变形网格技术的结合是一种较好的技术途径.此外为了满足工程应用对精细化数值模拟的要求往往需要采用较大规模的计算网格而串行的重叠网格装配技术以及变形网格技术显然难以满足工程应用对计算效率的要求需要发展并行化的动网格生成技术.针对以上问题作者发展了一种并行环境下重叠和变形耦合的动态混合网格技术该技术采用了基于网格分区的分布式并行方案每一个网格分区根据其所依赖的物理边界运动信息进行变形然后通过并行化重叠网格隐式装配技术进行挖洞和宿主单元查找.其中网格变形采用了基于径向基函数(radialbasisfunction RBF)的插值方法为提高网格变形效率采取了并行化的参考点选择算法以及插值算法.在该动态混合网格技术的基础上发展了流动/运动/控制一体化数值模拟方法进一步改进了作者课题组之前发展的具有完全自主知识产权的多学科耦合数值模拟平台 HyperFLOW.本文将对这些工作进行简要介绍并展示一些典型的应用算例.1㊀动态混合网格生成技术1.1㊀并行环境下重叠/变形网格技术的整体思路一般而言物体的复杂运动可以分解为体轴系内的柔性变形和整体的刚性运动.对于某些附着在其他物体上的部件(如飞行器的尾舵) 除了自身的运动之外还要随着飞行器进行牵连运动因此可采用3组6自由度参数定义其刚性运动即部件自身的自由度部件所附着的物体的自由度部件在其所附着的物体中安装的自由度.图1给出了物体刚性运动定义的示意图其中x0/y0/z0为惯性坐标系(简称C0) x1/y1/z1为飞行器质心坐标系(简称C1) x2/y2/z2为尾舵安装位置的坐标系(简称C2) 则尾舵的运动由其旋转角度㊁C2相对于C1的6自由度参数㊁C1相对于C0的6自由度参数共同决定.分别采用网格变形技术和动态重叠网格技术处理物体的柔性及刚性运动.首先在生成计算网格时需要围绕每一个物体或者部件生成独立的贴体子网格块并采用重叠网格技术将各个子网格块进行组装.子网格块可以采用三棱柱㊁四面体㊁金字塔㊁六边形等多种形式的混合单元(二维情况下为三角形㊁四边形㊁多面体等单元) 当物体发生变形和刚性运动之后首先每个子网格块根据其所依赖的物面点的运动信息在其体轴系内实现内部网格点的变形变形之后的子网格块再跟随物体进行刚性运动随后采用重叠网格技术将各个子网格块进行重新组装.图1㊀坐标系以及物体刚体运动的定义Fig.1㊀Definitionofthereferenceframeandtherigidmovementofbody动态混合网格生成流程如图2所示整个过程均在并行环境下进行采用了基于网格分区的分布式并行策略.在读入初始计算网格之后分别对围绕每个物体的子网格块进行分区并均匀分布至各31气体物理2019年㊀第4卷个进程同时提取其中各个物体或部件的物面网格信息并发送至所有进程.该全局的物面网格信息有两个用途(1)跟随物体进行变形(2)计算空间网格点或单元的最近壁面距离.动态网格生成过程中每个进程仅对其所负责的若干网格分区进行变形和刚性运动的计算且采用相同的物面网格以及物面参考点以保证网格分区边界的匹配.隐式重叠网格装配过程中需要通过各个进程之间的通讯来确定查询以及逻辑判断结果.算法的具体实现过程中如何建立耦合动态混合网格生成的整体程序框架如何保证各个功能模块的封装性㊁可扩展性是一个非常重要的内容.本文采用了C++面向对象的思想开发计算程序网格数据㊁流场数据是程序的核心依据这些数据结构建立MPI底层支撑环境并围绕这些数据㊁底层支撑环境开发具有高度封装性的功能模块从而保证各个模块的可扩展㊁可移植特性也提高了代码的容错能力并降低了维护成本.图3给出了程序的架构示意图各个功能模块之间须根据多学科耦合顶层计算流程的需要建立必要的信息传递接口.图2㊀动态混合网格生成的整体思路Fig.2㊀Sketchmapforthedynamicmeshgenerator图3㊀程序框架示意图Fig.3㊀Frameworkofthesoftwareplatform1.2 重叠网格装配技术重叠网格技术包括挖洞㊁宿主单元搜索以及流场插值3个方面的内容其中挖洞和宿主单元搜索称为重叠网格装配.根据挖洞过程的不同可以分为显式装配[6⁃9]和隐式装配[10⁃15]两类.显式装配过程首先要将落在物体内部的点或单元进行标记形成初始洞边界(判断点是否在物体内部的方法有矢量判别法[4]㊁射线求交法[5]㊁洞映射方法[6]㊁目标x射线法[7]等.) 然后通过一些优化算法将洞边界进行优化(例如割补法[8⁃9])并确定出插值单元最后查找插值单元的宿主单元.隐式装配技术须查找所有点或者单元的宿主单元通过对比单元的质量确定其属性挖洞过程则隐含在查询与判断的过程之中.Lee等[10]在2003提出了隐式装配的概念并将单元的尺度作为是否是活跃单元的判则.其实早在1999年Nakahashi等[11]针对非结构重叠网格的方法中就已经采用了隐式装配技术其采用节点的最近壁面距离作为活跃点的判则.Togashi等[12]进一步将基于最近壁面距离的该方法推广应用于复杂多体分离问题的数值模拟.Loehner等[13]Luo等[14]采用单元的尺度和壁面距离的组合量作为单元属性的判断标准使插值单元和贡献单元的大小匹配有助于提高插值稳定性并减少插值误差.非结构重叠网格隐式装配软件PUNDIT[15]亦采用了隐式装配技术.本文的基于网格分区的并行化装配技术分为两步执行.Step1 通过隐式装配技术划分点的属性Step2 判断插值单元并搜索其宿主单元.Step1中需要搜索所有网格点的宿主单元可以采用两种并行查询策略策略1 整体⁃局部 查询搜集所有分区内的网格点形成整体的网格点集并发送至所有进程然后在每个分区内搜索点集的宿主单元并通过MPI规约操作确定最终的查询结果策略2 辅助网格查询围绕各个物体或部件生成稀疏的辅助网格分别在各套辅助网格内进行宿主单元搜索并通过插值得到网格分区中计算网格点的质量(以最小壁面距离作为质量判则).在点属性划分过程中还采取了一种并行化的阵面推进技术能够快速高效地确定出联通的活跃区域.Step2的搜索过程采用与Step1中策略1类似的方式首先搜集每个网格分区内的插值单元以形41第6期常兴华等并行重叠/变形混合网格生成技术及其应用成整体的插值单元集合然后在各个网格分区内进行宿主单元查找.对于多套网格相互嵌套的问题可能存在多个宿主单元此时需要根据宿主单元的属性以及其最小壁面距离确定唯一的一个.本文将查找的宿主单元分为3个等级第1等级的为活跃单元标记为1 第2等级宿主单元为插值单元标记为⁃1 第3等级的宿主单元为非活跃单元标记为⁃2.优先选择等级较高的宿主单元如果存在多个等级相同的则进一步比较其最小壁面距离选择距离较小的作为最终结果.并行环境下通过如下的MPI通讯流程实现进程之间的逻辑判断(1)通过MPI全局规约命令确定宿主单元的最高等级(2)各个进程内如果宿主单元等级小于最高等级舍去该宿主单元(3)通过MPI全局规约命令确定宿主单元的最小壁面距离(4)各个进程内如果宿主单元的最小壁面距离大于该值则舍去该宿主单元(5)将剩下的唯一的宿主单元广播至所有进程.方法的具体细节请参见文献[16⁃17].1.3 并行化网格变形技术常见的网格变形方法有超限插值(transfiniteinterpolation TFI)方法[2]㊁弹簧松弛法[18⁃19]㊁Delaunay背景网格映射法[20]㊁RBF插值法[21⁃22]等这些方法各具特色并都已经得到广泛应用.在之前的研究工作中作者所在的研究团队发展了弹簧松弛法和Delaunay背景网格映射相结合的网格变形方法[23⁃25]并结合了局部网格重构技术从而可以模拟大变形㊁大位移等问题在多体相对运动问题中也得到了大量应用.在这些工作的基础上本文进一步集成了并行化RBF插值方法.当物面网格量较大时RBF方法中的插值矩阵会变得十分庞大导致空间网格点的插值计算量急剧增加.为了提高RBF插值效率参照文献[22]的做法选用有限的物面点作为参考点从而可以减少矩阵的规模提高空间网格点的插值效率.由于RBF插值过程不需要网格的拓扑关系因此其并行计算比较容易实现.其包括两部分的并行(1)物面点选择过程的并行(2)插值过程的并行.物面参考点的选择采用贪婪算法以物面点位移的误差作为准则.首先需要将物面点集平均分配到各个进程.在循环判断的过程中每个进程只对其所负责的物面点进行插值运算和比较并求出其中的最大误差点然后通过MPI通讯确定出所有进程中的误差最大点并加入参考点集主进程根据新的参考点集执行插值矩阵的更新以及求逆操作并将其广播至其他所有进程算法的具体流程如图4所示.空间点的插值直接基于网格分区进行每个进程只针对其所负责的网格分区进行插值运算每一个进程中存储相同的插值矩阵这样可以保证分区边界上点的匹配.图4㊀RBF变形网格法中并行化物面参考点选择方法Fig.4㊀ReferencenodeselectingmethodinparallelenvironmentforRBFmovinggridgeneration图5及表1给出了并行化RBF方法的测试算例.模型为简化的三维金枪鱼外形采用了三棱柱㊁四面体形式的混合网格其中物面网格点数9.8ˑ104空间网格单元数7.19ˑ106.采用单进程选择600个物面参考点耗时约16.2s 空间网格变形耗时约30.2s.采用64进程并行物面参考点选择耗时约6.0s 空间网格变形耗时约1.5s.并行效率较低的原因在于物面参考点选择阶段矩阵求逆过程没有并行化空间点位移插值阶段插值系数的计算过程没有并行化.这两部分计算均由主进程负责然后将计算结果发送给其他进程.51气体物理2019年㊀第4卷(a)Surfacemeshesandreferencenodes(rednodes)(b)Averagederrorandmaximumerrorofsurfacenodeswiththenumberofreferencenodes图5㊀物面参考点选择测试算例Fig.5㊀Testcaseforreferencenodeselection表1㊀并行RBF插值效率测试Table1㊀TestforparallelRBFmethodnumberofprocessorsreferencenodesselectionvolumenodesinterpolation116.2s30.2s646.0s1.5s1.4㊀动态混合网格生成实例本节展示了采用上述动态混合网格生成技术得到的一些典型应用实例.图6所示为三维情况下4条鱼群游过程的动态混合网格 网格单元由四面体㊁三棱柱㊁金字塔等组成 总数为1.05ˑ107.物面为三角形网格 网格点数8ˑ104 选取其中1200个作为RBF参考点.采用64进程并行 参考点选择耗时约4.7s 执行一次空间网格变形耗时约3.2s 重叠网格装配耗时约10s.图7所示为飞机外挂物投放过程的重叠网格 载机网格单元数2.5ˑ107 两个外挂物网格单元数约1.2ˑ107.采用256进程并行执行重叠网格装配耗时约7s.图中给出了分离过程中3个典型时刻的空间网格切面.图8给出了机翼外挂物分离的超大规模重叠网格 网格单元总数为2.88ˑ109 采用了12288进程并行计算.此算例采用了并行化的辅助网格查询技术 结合分布式并行计算 因此每个进程占用内存较少.图6㊀三维情况下鱼群游动过程的动态混合网格Fig.6㊀Dynamicmeshesfortheschoolingoffourfishesin3Dcase图7㊀战斗机分离投放过程的动态混合网格Fig.7㊀Dynamicmeshesduringtheseparationprocessbetweentwomissilesandaircraft61第6期常兴华 等 并行重叠/变形混合网格生成技术及其应用图8㊀超大规模重叠网格装配测试Fig.8㊀Hole⁃cuttingforlargescaleoversetmesh2㊀流动/运动/控制一体化数值计算方法针对飞行器机动飞行㊁生物体自主运动等流动㊁运动和控制等多学科耦合问题 作者课题组已经发展了流动/运动/控制耦合的一体化数值方法 并研发了虚拟飞行模拟平台 Hyper⁃FLOW[26⁃28].本文将上述重叠/变形动态混合网格生成技术进一步集成于HyperFLOW平台之中 使之能够适应于同时存在柔性变形和相对运动的复杂动边界问题.HyperFLOW平台[26⁃28]耦合了非定常RANS方程求解㊁刚体动力学求解和飞行控制律等多学科计算模块 并有机集成了动态混合网格生成模块 在统一的理论框架下建立了流动/运动/控制耦合的一体化数值模拟算法.在运动网格上进行非定常RANS方程计算 离散后的方程中含有网格几何量对时间的导数项 为避免由于网格运动引入的额外误差 几何守恒律(geometricconservationlaw GCL)应该和质量守恒㊁动量守恒㊁能量守恒一样在 数值 上得到满足.目前满足几何守恒律的算法很多 作者通过理论分析将其归纳为两类[29] 第1类方法通过在控制方程中引入源项 从而在整体上消除几何守恒误差.第2类方法通过限制面元的速度㊁法向㊁面积等求解方法 以满足面元扫过体积的守恒.通过截断误差分析以及数值测试 我们对各种满足几何守恒律的算法进行了分析[29].结果表明 第1类格式在整体上消除了几何守恒律误差 虽然能够保持均匀流的守恒 但是在非均匀流情况下添加的源项不能够和几何守恒律误差相互抵消 会残留一部分误差 而这部分误差可能会影响数值计算的精度 第2类格式在理论上更为严格 能够保证每个面元上体积通量的守恒 因此对于均匀流或者非均匀流都能够严格满足几何守恒律.详细内容请参见文献[29].根据耦合计算策略的不同 耦合计算方法一般可分为全耦合㊁松耦合和紧耦合3种.全耦合即将各个学科的控制方程视为一个统一㊁完整的系统进行求解.由于流动控制方程㊁运动/动力学方程等在性质上存在较大差异 因此全耦合格式比较难以实现.这里采用解耦方法进行耦合问题的求解 为了解决不同耦合程度的气动/运动耦合问题 我们建立了统一的框架 可通过参数选取实现不同时间精度的松耦合和紧耦合计算[30].我们选用圆柱自激震荡算例对松耦合㊁紧耦合算法进行了考核 与文献结果进行了对比 并对紧耦合㊁松耦合的适用范围进行了测试.结果表明 当物体密度远大于周围流体密度时 采用松耦合或者紧耦合均能够得到较好的计算结果 但是当物体密度接近或者小于周围流体密度时 采用松耦合的方式将难以得到收敛的计算结果 此时采用紧耦合算法是比较合适的选择.最后我们通过一维稳定性分析对该结论进行了验证[30].在此基础上 进一步耦合了飞行控制律 实现了 气动/运动/控制 的一体化数值模拟.在本文中 我们进一步将基于动态重叠网格的非定常RANS方程求解方法集成于HyperFLOW平台.其中涉及到第1节中介绍的重叠网格并行隐式装配 以及重叠区的物理量插值.我们将重叠边界视为一种特殊的网格块间交界面信息 从而很容易在并行分区环境下 实现重叠区的信息交换.关于重叠插值算法 我们目前仍采用普遍采用的双线性(2D)或三线性(3D)插值方法.具体的实现过程这里不再详述.3㊀一体化算法应用实例本节给出几个一体化算法的应用实例.第1个算例为战斗机纵向机动开环控制过程的模拟.通过给定水平尾舵的舵偏规律 战斗机在71面附近采用各向异性三棱柱网格 而远场采用各向同性的四面体网格.机身网格随体运动 水平尾舵根据控制律进行偏转 通过动态重叠与机身网格进行信息交换.图9所示为其纵向机动过程中的典型数值模拟结果(压力云图以及空间的Q等值面).图10所示为一体化算法在生物外流流体力学方面的典型应用.首先 模拟了二维情况下 在未考虑控制时4条鱼的自主群游起动过程(见图10(a)).4条鱼排成菱形阵形从静止流场中加速游动.鱼体的尾涡之间发生了非常剧烈的相互干扰 其中后鱼的游速大于前鱼 说明其受到了有益的流向干扰.其次 我们耦合简单的PID控制律 对二维情况下单个鱼体的转向过程进行了模拟(见图10(b)).数值模拟结果表明 建立的控制律能够较好地实现控制目标 鱼顺利完成了连续转弯及方向控制.最后 我们对三维鱼体自主游动的加速过程进行了模拟.图10(c)所示为鱼加速起动过程中的流场结构 达到更好的加速效果.需要指出的是 果 之中.因此 流场 关于机动过程中气动(水动)的演化㊁闭环控制效果的评估等 工作中陆续发表.=1.98ˑ107 t=Re=1.98ˑ107 t=Re=1.98ˑ107 t=0.4620s δ=15.00ʎQ⁃等值面)resultsforthepitchingmotionofanaircraftpressurecontourandQ⁃isosurface)(a)Fourfishschoolingwithoutcontrol(2D contourofvorticity)图10㊀一体化算法在生物外流流体力学方面的应用Fig.10㊀ApplicationsofHyperFLOWforbio⁃fluidsimulations4 结论本文介绍了作者在重叠/变形耦合动态混合网格生成技术及流动/运动/控制耦合一体化算法方面的研究工作.我们利用面向对象模块化软件设计方法初步建立了适用于复杂动边界问题的一体化数值模拟软件平台.典型飞行器俯仰机动过程和鱼体自主游动的数值模拟结果表明我们发展的动态混合网格生成技术及一体化数值模拟平台对于复杂动边界问题具有良好的适应性展现了广阔的应用前景.下一步工作中需要在如下几个方面加强研究(1)自适应网格技术的集成.通过自适应网格和重叠㊁变形网格技术的结合能够进一步提高数值模拟过程的自动化程度和数值模拟效果(2)DES数值模拟技术的研究与集成主要目的是为了提高飞行器在大迎角情况下复杂分离流动的数值模拟精度(3)多学科耦合模拟软件架构深化研究.我们将采用基于事件驱动的设计思路进一步增强软件的模块化㊁封装性和可扩展性.通过底层网格数据㊁流场数据的集中管理实现各种数值格式在空间上气体物理2019年㊀第4卷的混合运算以进一步提高数值模拟效果(4)结构动力学模块研制与集成.在飞行器机动飞行过程中结构载荷更大有可能导致结构的大变形进而导致气动力的巨大变化.为了准确模拟机动飞行过程必须考虑结构变形带来的影响.致谢㊀感谢国家重点研发计划(2016YFB0200701)以及国家自然科学基金(11532016 11672324)对本文工作的支持.参考文献(References)[1]㊀StegerJL DoughertyFC BenekJA.Achimeragridscheme[C].PresentedatAppliedMechanics Bioengi⁃neering andFluidsEngineeringConference June20⁃22 1983 Houston AmericanSocietyofMechanicalEn⁃gineers.[2]NakamichiJ.CalculationsofunsteadyNavier⁃Stokese⁃quationsaroundanoscillating3Dwingusingmovinggridsystem[R].AIAA1987⁃1158 1987.[3]KimD ChoiH.Immersedboundarymethodforflowa⁃roundanarbitrarilymovingbody[J].JournalofComputa⁃tionalPhysics 2006 212(2) 662⁃680.[4]BenekJA StegerJL DoughertyFA.AflexiblegridembeddingtechniquewithapplicationtotheEulerequa⁃tions[R].AIAA1983⁃1944 1983.[5]LaBozzettaWF GatzkeTD EllisonS etal.MACGS⁃towardsthecompletegridgenerationsystem[R].AIAA1994⁃1923 1994.[6]ChiuIT MeakinR.Onautomatingdomainconnectivityforoversetgrids[R].AIAA1995⁃0854 1995.[7]MeakinRL.ObjectX⁃raysforcuttingholesincompositeoversetstructuredgrid[R].AIAA2001⁃2537 2001.[8]ChoKW KwonJH LeeS.Developmentofafullysys⁃temizedchimeramethodologyforsteady/unsteadyproblems[J].JournalofAircraft 1999 36(6) 973⁃980.[9]李亭鹤阎超李跃军.重叠网格技术中割补法的研究与改进[J].北京航空航天大学学报2005 31(4)402⁃406.LiTH YanC LiYJ.Investigationandenhancementofcut⁃pastealgorithminoverlappinggrid[J].JournalofBeijingUniversityofAeronauticsandAstronautics2005 31(4) 402⁃406(inChinese).[10]LeeYL BaederJD.Implicitholecutting-anewap⁃proachtooversetgridconnectivity[R].AIAA2003⁃4128 2003.[11]NakahashiK TogashiF SharovD.Anintergrid⁃boundarydefinitionmethodforoversetunstructuredgridapproach[R].AIAA1999⁃3304 1999.[12]TogashiF ItoY NakahashiK etal.Oversetunstruc⁃turedgridsmethodforviscousflowcomputations[J].AIAAJournal 2006 44(7) 1617⁃1623.[13]LoehnerR SharovD LuoH etal.Overlappingun⁃structuredgrids[R].AIAA2001⁃0439 2001.[14]LuoH SharovD BaumJ etal.Anoverlappingunstruc⁃turedgridmethodforviscousflows[R].AIAA2001⁃2603 2001.[15]RogetB SitaramanJ.Robustandefficientoversetgridassemblyforpartitionedunstructuredmeshes[J].JournalofComputationalPhysics 2014 260 1⁃24.[16]常兴华马戎张来平.并行化非结构重叠网格隐式装配技术[J].航空学报2018 39(6) 121780.ChangXH MaR ZhangLP.Parallelimplicithole⁃cuttingmethodforunstructuredoversetgrid[J].ActaAeronauticaetAstronauticaSinica 2018 39(6)121780(inChinese).[17]ChangXH MaR WangNH etal.Parallelimplicithole⁃cuttingmethodforunstructuredChimeraGrid[C].10thInternationalConferenceonComputationalFluidDy⁃namics(ICCFD10) 2018 Barcelona Spain.[18]BlomFJ.Considerationsonthespringanalogy[J].Inter⁃nationalJournalofNumericalMethodsinFluids 200032(6) 647⁃668.[19]BatinaJT.UnsteadyEulerairfoilsolutionsusingunstruc⁃tureddynamicmeshes[J].AIAAJournal 1990 28(8)1381⁃1388.[20]LiuXQ QinN HaoX.FastdynamicgriddeformationbasedonDelaunaygraphmapping[J].JournalofCompu⁃tationalPhysics 2006 211(2) 405⁃423.[21]RendallTCS AllenCB.Efficientmeshmotionusingradialbasisfunctionswithdatareductionalgorithms[J].JournalofComputationalPhysics 2009 229(17)6231⁃6249.[22]RendallTC AllenCB.Reducedsurfacepointselectionoptionsforefficientmeshdeformationusingradialbasisfunctions[J].JournalofComputationalPhysics 2010229(8) 2810⁃2820.[23]张来平段旭鹏常兴华等.基于Delaunay背景网格插值和局部网格重构的变形体动态混合网格生成技术[J].空气动力学学报2009 27(1) 32⁃40.ZhangLP DuanXP ChangXH etal.Ahybriddy⁃namicgridgenerationtechniqueformorphingbodiesbasedonDelaunaygraphandlocalremeshing[J].ActaAerodynamicaSinica 2009 27(1) 32⁃40(inChi⁃nese).[24]张来平常兴华赵钟等.复杂外形静动态混合网02第6期常兴华等并行重叠/变形混合网格生成技术及其应用格生成技术研究新进展[J].气体物理2016 1(1)42⁃61.ZhangLP ChangXH ZhaoZ etal.Recentprogressofstaticanddynamichybridgridgenerationtechniqueso⁃vercomplexgeometries[J].PhysicsofGases 2016 1(1) 42⁃61(inChinese).[25]ZhangLP ChangXH DuanXP etal.Applicationsofdynamichybridgridmethodforthree⁃dimensionalmov⁃ing/deformingboundaryproblems[J].Computers&Flu⁃ids 2012 62 45⁃63.[26]HeX HeXY HeL etal.HyperFLOW Astructured/unstructuredhybridintegratedcomputationalenvironmentformulti⁃purposefluidsimulation[J].Pro⁃cediaEngineering 2015 126 645⁃649.[27]常兴华马戎张来平等.基于计算流体力学的 虚拟飞行 技术及初步应用[J].力学学报2015 47(4) 596⁃604.ChangXH MaR ZhangLP etal.StudyonCFD⁃basednumericalvirtualflighttechnologyandpreliminaryapplication[J].ChineseJournalofTheoreticalandAppliedMechanics 2015 47(4) 596⁃604(inChi⁃nese).[28]ZhangLP ChangXH MaR etal.ACFD⁃basednu⁃mericalvirtualflightsimulatoranditsapplicationincontrollawdesignofamaneuverablemissilemodel[J].ChineseJournalofAeronautics 2019(inpress).[29]ChangXH MaR ZhangLP etal.Furtherstudyonthegeometricconservationlawforfinitevolumemethodondynamicunstructuredmesh[J].Computers&Fluids2015 120 98⁃110.[30]马戎常兴华赫新等.流动/运动松耦合与紧耦合计算方法及稳定性分析[J].气体物理2016 1(6)36⁃49.MaR ChangXH HeX etal.Looseandstrongcou⁃plingmethodsforflow/kinematicscoupledsimulationsandstabilityanalysis[J].PhysicsofGases 2016 1(6) 36⁃49(inChinese).12。
电子专业英语

半导体(Semiconductors)本征半导体(Intrinsic Semiconductor)杂质半导体(Impurity Semiconductor)电子(Electron)空穴(Cavity)硅Si(Silicon)锗Ge(Germanium)N型半导体(Negative Semiconductor)P型半导体(Positive Semiconductor)PN结(PN junction)自由电子(Free electron)自由空穴(Free hole)耗尽层(Depletion layer)电荷(Electric charge)单向导电性(One-way conductive)漏电流(Leakage current)整流(Rectifier)滤波(Filtering)稳压(Regulator)参数(Parameter)穿透电流(Shoot-through currents)发光二极管LED (Light Emitting Diode)双极型晶体管BJT (Bipolar Junction Transistor) 发射结(Emitter junction)集电结(Collector junction)发射极E(Emitter)基极B(Base)集电极C(Collector)输出(Output )输入(Input )输入曲线(Input curve)输出曲线(Output curve)负载(Load)短路(Short-circuit)开路(Open circuit)交流电AC(Alternating Current)直流电DC(Direct Current)通频带BW(Frequency bandwidth)反馈(Feedback)耦合(Coupling)截止频率(Cut-off frequency)波形(Waveform)失真(Distortion)波形失真(Waveform distortion)等效电路(Equivalent circuit)转换效率(Conversion efficiency)功耗(Power consumption)分析(Analysis)正弦波(Sine wave)三角波(Triangular wave)方波(Square wave)导通(Conduction)关断(Shutdown)桥式(Bridge)推挽(Push-pull)差分放大电路(Differential amplifier circuit)功率放大电路(Power amplifier circuit)振荡电路(Oscillation circuit)结型场效应管JFFED(Junction Field Effect Transistor)绝缘栅型场效应管(也叫金属-氧化物场效应晶体管)(MOSFE)(Metal-OxideSemiconductor Field Effect Transistor)静态工作点、即Q点(Quiescent Point)H(Hybrid)参数温度漂移(Temperature drift)零点漂移(Zero drift)差模(Differential mode)共模(Common-mode)集成电路简称IC (Integrated Circuit)集成运放(Integrated Operational Amplifier)模拟电路(Analog circuit)数字电路(Digital circuits)镜像电流源(电流镜Current Mirror)二极管D(Diode)三极管T(Transistor)电阻R(Resistor)电容C(Capacitor)表面贴装技术、简称SMT(Surface Mounting Technology)表面貼裝設備、简称SMD(Surface Mounting Device)表面貼裝元件、简称SMC(Surface Mounting Component )印刷電路板組裝、简称PCBA(Printed Circuit Board Assembly )印刷電路板、简称PCB(Printed Circuit Board)芯片(Chip)錫膏(Solder Paste )焊锡(Solder )焊盘(Pad)端子(Pin )品质管理QC (Quality Control)国际标准化组织ISO (International Standard Organization)电脑(Computer)个人电脑PC (Personal Computer)电烙铁(Hand solder)通用串行总线USB(Universal Serial Bus)电感(Inductor)保险丝(Fuse)石英晶体(Quartz Crystal)开关(Switch)四方扁平封装电路QFP(Quad flat package)小轮廓封装Sop (Small OutlinePackage)球形阵列封装BGA(Ball grid array)温度T(Temperature)机器(Machine)手插元件PTH(Plated though hole)管脚(Leads)电阻值Ω(Ohms)滤波器(Filter)极性(Polarity)单位符号(Value Code):误差(Tolerance)双列直插式DIP(Dual In-line Package)单列直插式SIP(Single In-line Package)电子(Electrical )信号(Signals)放大(Amplify)放大器(Amplifier)连接器(Connector)电线(Wires)散热片(Heatsink)电池(Battery)兆赫兹MHz(Megahertz)千赫兹KHz(kilohertz)赫兹Hz(Hertz)电流(Current )电压(Voltage)最大值Max(Maximum)最小值Min(Minimum)安培A(Amps)伏特V(Volt)过载(Overload)传感器(Sensor)液晶显示器LCD (Liquid Crystal Display)瓷片电容(Ceramic Chip Capacitor )电解电容(Electrol ytic capacitor )振荡器(Oscillator)时钟(Clock)可调电阻(Trimmer Chip Resistor)脉宽调制电路PWM(Pules Width Modulation)时间常数(Time constant)增益(Gain)频率(Frequency)静电(Electrostatic)放电(Discharge)材料(Material)产品(Product)电路(Circuit)极性(Polarity)噪音(Noise)电荷(Electric charge)元件(Component)变压器(Transformer)电源(Power)百万分之一PPM (Percent Per Million)助焊剂(Flux)。
光伏控制英语

IntroductionPhotovoltaic (PV) systems, harnessing the power of sunlight to generate electricity, have emerged as a pivotal component of global renewable energy strategies. The efficient and reliable operation of these systems is largely dependent on sophisticated control mechanisms that optimize their performance, ensure safety, and facilitate seamless integration with electrical grids. This comprehensive analysis delves into various aspects of PV control, exploring the technologies, methodologies, and standards that underpin high-quality, high-standard PV systems.I. Fundamental Principles of Photovoltaic ControlThe core objective of PV control is to maximize energy yield while maintaining system stability and compatibility with the grid. Key principles guiding this endeavor include:1. Maximum Power Point Tracking (MPPT): MPPT algorithms dynamically adjust the operating point of the PV array to extract the maximum available power under varying environmental conditions such as solar irradiance and temperature. Advanced MPPT techniques, such as perturb-and-observe, incremental conductance, and fuzzy logic, offer improved tracking accuracy and response time.2. Power Quality Management: PV inverters, responsible for converting DC power from the PV array to AC power compatible with the grid, must adhere to stringent power quality standards. Harmonic distortion, voltage flicker, and reactive power compensation are critical parameters that need to be controlled to prevent grid instability and equipment damage.3. Grid Interfacing and Compliance: PV systems must comply with grid codes and regulations, which vary across jurisdictions. Key requirements include low-voltage ride-through capability, frequency and voltage regulation support, and provision of ancillary services like reactive power control and active power curtailment.II. Advanced Control Strategies for Enhanced Performance1. Distributed MPPT: In large-scale PV installations, employing multiple MPPT units per inverter or using module-level power electronics can significantly enhance overall system efficiency by mitigating the effects of partial shading, module mismatch, and soiling.2. Forecasting and Predictive Control: Integrating weather forecasting and historical data analysis enables proactive control strategies that anticipate changes in solar irradiance and temperature, thereby optimizing power output and reducing energy losses. Machine learning algorithms can further enhance predictive capabilities by learning patterns and adapting to site-specific conditions.3. Hybrid Energy Systems Control: In scenarios where PV is combined with other renewable sources or energy storage, advanced control strategies are necessary to coordinate the operation of these components, ensuring optimal energy utilization, stability, and cost-effectiveness.III. Cybersecurity and Communication ProtocolsAs PV systems increasingly rely on digital communication and remote monitoring, cybersecurity becomes a paramount concern. Ensuring secure data transmission, protecting against cyber threats, and maintaining system integrity are vital for high-quality, high-standard PV control. Key aspects include:1. Secure Communication Protocols: Implementing industry-standard communication protocols like Modbus TCP/IP, DNP3, or IEC 61850, with robust encryption and authentication mechanisms, safeguards against data breaches and unauthorized access.2. Intrusion Detection and Prevention Systems: Deploying advanced cybersecurity measures, such as firewalls, intrusion detection/prevention systems (IDS/IPS), and regular firmware updates, fortifies PV systems against potential cyberattacks.3. Cybersecurity Standards Compliance: Adhering to international standards like IEC 62443 for industrial control systems security and NIST Cybersecurity Framework ensures a systematic approach to addressing cybersecurity risks in PV systems.IV. Quality Assurance and StandardizationTo guarantee high-quality, high-standard PV control, adherence to rigorous testing, certification, and standardization processes is essential. Key aspects include:1. International Standards: Compliance with international standards like IEC 61727 for MPPT performance evaluation, IEC 61000 for electromagnetic compatibility, and UL 1741 for inverter safety and performance ensures consistency and interoperability across different PV systems and markets.2. Certification and Testing: Third-party certification by recognized bodies like TÜV Rheinland, UL, or Intertek provides independent validation of PV control systems' compliance with relevant standards, enhancing reliability and consumer confidence.3. Continuous Monitoring and Maintenance: Regular system monitoring, performance assessment, and maintenance according to guidelines like O&M Best Practices Guidelines for Photovoltaic Systems ensure sustained high performance and early detection of potential issues.V. Future Perspectives and Technological AdvancesThe ongoing evolution of PV control is driven by advancements in areas such as:1. Digital Twins and Virtual Commissioning: Digital replicas of PV systems enable virtual testing and optimization of control strategies before deployment, reducing commissioning time and costs while enhancing overall system performance.2. Edge Computing and AI: Integrating edge computing devices and artificial intelligence algorithms can enable real-time, autonomous decision-making at the component level, further improving MPPT efficiency, fault detection, and predictive maintenance.3. Grid 2.0 Integration: As power grids transition towards more decentralized, flexible, and intelligent architectures (Grid 2.0), PV control systems will need to adapt to support bi-directional power flows, enhanced grid stability services, and participation in local energy markets.ConclusionHigh-quality, high-standard photovoltaic control is a multifaceted endeavor that encompasses advanced control strategies, robust cybersecurity measures, rigorous quality assurance, and continuous adaptation to technological advancements. By diligently addressing these aspects, the global PV sector can accelerate its contribution to a sustainable, resilient, and low-carbon energy future.。
好威 HCA系列交流充电机用户手册说明书
User ManualAC ChargerHCA Series(7-22kW)V1.0-2022-10-20Copyright Statement User Manual V1.0-2022-10-20The information in this user manual is subject to change due to product updates or other reasons. This guide cannot replace the product labels or the safety precautions in the user manual unless otherwise specified. All descriptions in the manual are for guidance only.and other GoodWe trademarks are trademarks of GoodWe Company. All other trademarks or registered trademarks mentioned in this manual are owned by GoodWe Company.TrademarksNOTICENo part of this manual can be reproduced or transmitted to the public platform in any form or by any means without the prior written authorization of GoodWe.Copyright©GoodWe Technologies Co.,Ltd. 2022. All rights reserved.CONTENT User Manual V1.0-2022-10-20 CONTENT1 About This Manual (1)1.1 Applicable Model (1)1.2 Target Audience (1)1.3 Symbol Definition (2)1.4 Updates (2)2 Safety Precaution (3)2.1 General Safety (3)2.2 AC Charger Safety (3)2.3 Personnel Requirements (4)2.4 Declaration of Conformity (4)3 Product Introduction (5)3.1 Product Overview (5)3.2 Application Scenarios (6)3.3 Operating Status of the Charger (8)3.4 Functionality (9)3.5 Appearance (10)3.5.1 Parts Description (10)3.5.2 Dimension (11)3.5.3 Indicator Description (12)3.5.4 Nameplate (13)4 Check and Storage (14)4.1 Check Before Receiving (14)4.2 Deliverables (14)4.3 Storage (14)5 Installation (15)5.1 Installation Requirements (15)5.2 Installation (17)5.2.1 Moving the Charger (17)5.2.2 Installing the Charger (18)5.2.3 Installing the Charger (Column Mounting) (20)6 Electrical Connection (22)6.1 Safety Precaution (22)6.2 Connecting the RCD Cable (23)6.3 Connecting the AC Cable (25)7 Equipment Commissioning (28)7.1 Check Before Power ON (28)7.2 Power On (28)User Manual V1.0-2022-10-20CONTENT7.3 Charging EV (29)7.3.1 Online Charging via SEMS Portal App (29)7.3.2 Offline Charging Steps via SolarGo App (29)7.3.3 Plug And Charge (29)8 System Commissioning (30)8.1 Indicator (30)8.2 Setting and Checking Charger Information via SolarGo APP (installers) (30)8.3 Setting and Checking Charger Information via SEMS Portal (User) (30)9 Maintenance (31)9.1 Power Off the Charger (31)9.2 Dismantle the Charger (31)9.3 Discard the Charger (31)9.4 Routine Maintenance (31)9.5 Troubleshooting (32)10 Technical Parameters (34)User Manual V1.0-2022-10-2001 About This Manual1 About This ManualThis manual describes the product information, installation, electrical connection, commissioning, troubleshooting and maintenance of the charger. Read through this manual before installing and operating the product. All the installers and users have to be familiar with the product features, functions, and safety precautions. This manual is subject to update without notice. For more product details and latest documents, visit https:///.1.1 Applicable ModelThis manual applies to the listed chargers below: (Hereinafter referred to as HCA).• GW7K-HCA• GW11K-HCA• GW22K-HCA1.2 Target AudienceThis manual applies to trained and knowledgeable technical professionals only. The technical personnel has to be familiar with the product, local standards, and electric systems.01 About This ManualUser Manual V1.0-2022-10-201.3 Symbol Definition1.4 UpdatesThe latest document contains all the updates made in earlier issues.V1.0 2022-10-20• First IssueDifferent levels of warning messages in this manual are defined as follows:User Manual V1.0-2022-10-2002 Safety Precaution 2 Safety PrecautionPlease strictly follow these safety instructions in the user manual during the operation.2.2 AC Charger Safety02 Safety PrecautionUser Manual V1.0-2022-10-202.3 Personnel Requirements2.4 Declaration of ConformityThe product with wireless communication function sold in the British market meets the requirements of the following directives:• Radio Equipment Regulations 2017• The Restrictions of the use of Certain Hazardous Substances in Electrical and Electronic Equipment Regulations 2012 (S.I. 2012/3032)The product with wireless communication function sold in the European market meets the requirements of the following directives:• Radio Equipment Directive 2014/53/EU (RED)• Restrictions of Hazardous Substances Directive 2011/65/EU and (EU) 2015/863 (RoHS)EUUKUser Manual V1.0-2022-10-2003 Product Introduction 3 Product Introduction3.1 Product OverviewHCA series product is one AC household charger mainly for EV charging, with functions like charging protection, online monitoring, remote upgrading, and so on.ModelModel descriptionThis manual applies to the listed chargers below:• GW7K-HCA• GW11K-HCA•GW22K-HCA03 Product IntroductionUser Manual V1.0-2022-10-203.2 Application Scenarios Connected to Grid Utility Grid Utility MeterRCD Charger EV (Electric Vehicle)BatteryPower cable Signal cablePower cable Signal cableUser Manual V1.0-2022-10-2003 Product IntroductionPower cableSignal cableConnected to PV String and Batteries (Near Field Control)03 Product IntroductionUser Manual V1.0-2022-10-203.3 Operating Status of the ChargerCircuit DiagramBelow is the circuit diagram for HCA Charger:(Reserved) It is able to communicate with the inverters or smart meter via the RS485 communication port.For single phase AC charger and three phase AC charger, the input port is used to connect with single-phase three-wire power cable and three-phase five-wire power cable respectively.The output port is used to connect with the charging connector.Emergency Stop refers to the emergency stop button.Grid or AC Power SourceUser Manual V1.0-2022-10-2003 Product Introduction 3.4 FunctionalityApplicable for Diverse Scenarios• The charger can be used together with grid-tied or hybrid inverters to form a PV-Storage-Charging integrated ecological system.• The charger can be connected with grid.Remote ControlWhen the charger is on line, users can control it remotely via SEMS Portal app, and upgrade the firmware remotely via the device management platform.Easy to Use and Maintain• The charger supports operation via commands issued by APP remotely when it is on line. • The charger supports operation via Bluetooth connected to APP in a short distance when it is off line.• The charger supports charging EV directly under Plug And Charge mode.• Users can check the charger’s real-time status via its indicator.• Users can check the charger's fault and operating data via APP.Safe and Reliable• The ingress protection rating of the charger is IP65, and the ingress protection rating of the charging plug is IP55. With a high rating, the charger has excellent anti-dust and waterproof features and can be operated and maintained outdoors.• To protect the product and ensure a secure running status, the product is integrated with over voltage and under voltage protection, over load protection, short-circuit protection, leakage protection, grounding, over temperature protection, EMS protection and protection against lighting.03 Product IntroductionUser Manual V1.0-2022-10-203.5 Appearance3.5.1 Parts DescriptionUser Manual V1.0-2022-10-2003 Product Introduction 3.5.2 Dimension(Optional) Residual Current Device Distribution BoardRCD for GW11K-HCA & GW22K-HCA03 Product IntroductionUser Manual V1.0-2022-10-203.5.3 Indicator Description(Optional) Installation PostUser Manual V1.0-2022-10-2003 Product Introduction 3.5.4 NameplateThe nameplate is for reference only.04 Check and StorageUser Manual V1.0-2022-10-204 Check and Storage4.1 Check Before ReceivingCheck the following items before receiving the product.1. Check the outer packing box for damage, such as holes, cracks, deformation, and others signs of equipment damage. Do not unpack the package and contact the supplier as soon as possible if any damage is found.2. Check the charger model. If the charger model is not what you requested, do not unpack the product and contact the supplier.3. Check the deliverables for correct model, complete contents, and intact appearance. Contact the supplier as soon as possible if any damage is found.4.3 StorageIf the charger is not to be installed or used immediately, please ensure that the storage environment meets the following requirements:1. Do not unpack the outer package or throw the desiccant away.2. Store the charger in a clean place. Make sure the temperature and humidity are appropriate and no condensation.3. The height and direction of the stacking chargers should follow the instructions on the packing box.4. The chargers must be stacked with caution to prevent them from falling.5. If the charger has been long term stored, it should be checked by professionals before being put into use.4.2 DeliverablesUser Manual V1.0-2022-10-2005 Installation5 Installation5.1 Installation RequirementsInstallation Environment Requirements1. Do not install the equipment in a place near flammable, explosive, or corrosive materials.2. Do not install the equipment in a place that is easy to touch. High temperature exists when the equipment is working. Do not touch the surface to avoid burning.3. Avoid the water pipes and cables buried in the wall when drilling holes.4. Install the equipment in a sheltered place.5. The place to install the equipment shall be well-ventilated for heat radiation and large enough for operations.6. The equipment with a high ingress protection rating can be installed indoors or outdoors. The temperature and humidity at the installation site should be within the appropriate range.7. Install the equipment at a height that is convenient for operation and maintenance, electrical connections, and checking indicators and labels.8. The altitude to install the charger shall be lower than the maximum working altitude 2000m.9. Install the equipment away from electromagnetic interference.05 Installation User Manual V1.0-2022-10-20 Mounting Support Requirements• The mounting support shall be nonflammable and fireproof.• Install the charger on a surface that is solid enough to bear the charger weight. Installation Angle Requirements• It is recommended to install the charger vertically.• Do not install the charger upside down, forward tilt, back forward tilt, or horizontally.User Manual V1.0-2022-10-2005 InstallationThe following tools are recommended when installing the equipment. Use other auxiliary tools on site if necessary.Installation Tool Requirements5.2 Installation5.2.1 Moving the Charger05 InstallationUser Manual V1.0-2022-10-205.2.2 Installing the ChargerStep 1 Take the mounting plate from the charger.Step 2 Put the plate on the wall horizontally and mark positions for drilling holes.Step 3 Drill holes to 50mm in depth by using the hammer drill with 8mm in diameter.Step 4 Use the expansion bolts to fix the charger on the wall.Step 5 Install the charger on the mounting plate.Step 6 Tighten the nuts to secure the mounting plate and the charger, ensure the charger’s installation is reliable.User Manual V1.0-2022-10-2005 InstallationInstalling the Residual Current Device Distribution BoardStep 1: Put the distribution board on the wall horizontally and mark positions for drilling holes.Step 2: Drill holes using the hammer drill.Step 3: Use the expansion bolts to fix the distribution board on the wall.Type II Distribution BoardType I Distribution Board05 InstallationUser Manual V1.0-2022-10-20Step 1 Take the mounting plate from the charger.Step 2 Put the post on the ground vertically and mark positions for drilling holes. A cable pipe with a diameter of 60mm has to be embedded underground.Step 3 Drill holes to 75mm in depth by using the hammer drill with 14mm in diameter.Step 4 Run the embedded cable through the post.Step 5 Use the expansion bolts to fix the charger on the ground.Step 6 Install the mounting plate on the post.Step 7 Install the charger on the mounting plate.Step 8 Tighten the nuts to secure the mounting plate and the charger, and ensure the charger is installed reliably.5.2.3 Installing the Charger (Post Mounting)Installing the Charger561111User Manual V1.0-2022-10-2005 Installation06 Electrical ConnectionUser Manual V1.0-2022-10-206 Electrical Connection6.1 Safety PrecautionUser Manual V1.0-2022-10-2006 Electrical ConnectionWiring SpecificationsRCD SpecificationsStep 1 Prepare the AC cable.Step 2 Crimp the AC cable.Step 3 Run the AC cable and terminal through the distribution box.Step 4 Screw the AC terminal on the RCD.Step 5 Install the top cover of the RCD distribution box to prevent water or foreign matters.06 Electrical ConnectionUser Manual V1.0-2022-10-20Type I RCDUser Manual V1.0-2022-10-2006 Electrical Connection Type II RCD6.3 Connecting the AC CableStep 1 Prepare the AC cable.Step 2 Crimp the AC cable.Step 3 Insert the AC input cable into the AC terminals and tighten it.Step 4 Tignten the AC input terminal into the charger.06 Electrical ConnectionUser Manual V1.0-2022-10-20AC-1 ConnectorUser Manual V1.0-2022-10-2006 Electrical ConnectionAC-2 Connector07 Equipment CommissioningUser Manual V1.0-2022-10-207.2 Power OnTurn on the RCD between the charger and the grid.7 Equipment Commissioning7.1 Check Before Power ONConnected to PV String and BatteriesUtility Grid Utility Meter RCD ChargerStep 1 Turn on the AC and DC switches on the inverter side.Step 2 (Optional) Turn on the switches on the battery side.Step 3 Turn on the RCD.User Manual V1.0-2022-10-2007 Equipment Commissioning7.3 Charging EVStep 1 Plug the charging plug into EV charging port.Step 2 Open SEMS Portal App and connect with the charger via the App. Then tab Start Charging .Step 3 Check EV’s charging status via the App or the charger indicator.Step 4 Tab End Charging on the App and the charging ends.Step 5 Disconnect the charging plug and put its cap. Wrap the cable around the charger.Step 1 Plug the charging plug into EV charging port.Step 2 Open SolarGo App and connect with the charger via the App. Then tab Start Charging . Step 3 Check EV’s charging status via the App or the charger indicator.Step 4 Tab End Charging on the App and the charging ends.Step 5 Disconnect the charging plug and put its cap. Wrap the cable around the charger.Step 1 Plug the charging plug into EV charging port.Step 2 The charging begins automatically.Step 3 Check EV’s charging status via the charger indicator.Step 4 Put its cap after charging and wrap the cable around the charger.7.3.1 Online Charging via SEMS Portal App7.3.2 Offline Charging Steps via SolarGo App7.3.3 Plug And Charge08 System Commissioning User Manual V1.0-2022-10-208 System Commissioning8.1 IndicatorSolarGo App User Manual8.3 Setting and Checking Charger Information via SEMS Portal (User)SEMS Master User Manual8.2 Setting and Checking Charger Information via SolarGo APP (installers)SEMS Portal AppSolarGo App SEMS Portal is a monitoring platform used to control the charger and inverter monly used functions:• Check the working status of the charger remotely or nearly • Start or stop charging remotely or nearly • Check the charging recordsFor more details, refer to SEMS Portal User Manual. Scan the QR code or visit https:///Ftp/EN/Downloads/User%20Manual/GW_SEMS%20Portal-User%20Manual-EN.pdf to get the user manual.SolarGo is a smart phone application used to configure the charger. Commonly used functions:• Check the working status of the charger.• Check the charging records etc.For more details, refer to SolarGo User Manual. Scan the QR code or visit https:///Ftp/EN/Downloads/User%20Manual/GW_SolarGo_User%20Manual-EN.pdf to get the user manual.User Manual V1.0-2022-10-2009 Maintenance9 Maintenance9.1 Power Off the ChargerDisconnect the RCD between the charger and the grid/inverter.9.3 Discard the ChargerIf the charger cannot work anymore, dispose of it according to the local disposal requirements for electrical equipment waste. The charger cannot be disposed of together with household waste.9.2 Dismantle the ChargerStep 1 Disconnect all cables, including AC and communication cables.Step 2 Remove the charger from the mounting plate.Step 3 Remove the mounting plate.Step 4 Store the charger properly. If the charger needs to be used later, ensure that the storage conditions meet the requirements.9.4 Routine Maintenance09 MaintenanceUser Manual V1.0-2022-10-209.5 TroubleshootingThe charger shows in red when there is fault. Log into SEMS Portal App or PV Master App for detailed troubleshooting.Perform troubleshooting according to the following methods. Contact the After Sales Service if these methods do not work.Collect the information below before contacting the After Sales Service, so that the problems can be solved quickly.1. Charger information like serial number, software version, installation date, fault time, fault frequency, etc.2. Installation environment, including weather conditions, and so on. It is recommended to provide some photos and videos to assist in analyzing the problem.3. Utility grid situation.User Manual V1.0-2022-10-2009 MaintenanceUser Manual V1.0-2022-10-2010 Technical parameters*1: Ingress Protection Rating: Charging Plug IEC type 2 is IP55.GoodWe Technologies Co., Ltd.No. 90 Zijin Rd., New District, Suzhou, 215011, China ******************GoodWe WebsiteLocal Contacts。
基于混合储能的孤岛微网VSG控制策略
1.1 孤岛微网结构 基于 VSG 控制的光储柴微网结构如图 1 所示。
光伏阵列、超级电容器和蓄电池分别经 Boost 变换 器和双向 DC/DC 变换器汇入直流母线,再经逆变 器与滤波器接入交流母线。三相逆变器采用 VSG 控制,使光储发电单元呈现出同步发电机特性,稳 定微网频率。光储发电单元与柴油发电机并联,通 过交流母线组成独立微网,向负载进行供电。
本文以光-储-柴组建的孤岛微网为例,提出一 种基于混合储能且不需改变惯性系数的 VSG 惯性 强化策略。首先,利用一阶高通滤波器提取母线负 荷与光伏功率差值的高频分量,并将其作为 VSG 额定功率的附加量;其次在 VSG 直流端接入混合 储能,利用蓄电池提供下垂功率,超级电容器提供 惯性功率和额外惯性功率提升微网惯性;然后引入 与超级电容器荷电状态和额外惯性功率相关的出力 系数,优化超级电容器在荷电状态不佳时的出力, 实现自适应控制。最后在不同负荷、光照强度和超 级电容器荷电状态下进行仿真,验证了本文控制策 略的正确性与有效性。
2. College of Electrical and Information Engineering, Hunan University, Changsha 410082, China)
Abstract: Changing the inertia coefficient in the Virtual Synchronous Generator (VSG) control strategy will cause system instability. Thus a hybrid energy storage-based control strategy without changing the inertia coefficient is proposed. First, the load or new energy fluctuation is regarded as the additional quantity of VSG rated power after passing through the first-order high pass filter as with a conventional VSG control strategy. Secondly, the battery connected to the DC terminal of the VSG is used to provide droop power, and the super capacitor provides virtual inertial power and additional inertial power. This improves the frequency dynamic characteristics of the microgrid. Then, the output coefficient related to the state of charge of the supercapacitor and the additional inertial power is introduced to realize the adaptive control of the supercapacitor and optimize the state of charge of the supercapacitor in the inertia strengthening process. Finally, an islanded microgrid with VSG as the inverter control interface is built in Matlab/Simulink. The effectiveness of the proposed strategy is verified by simulation under different loads, light intensities and supercapacitor states of charge.
7.2声道网络A V接收器TX-NR636使用说明书

TX-NR6367.2-Channel Network A/V Receiver2014 NEW PRODUCT RELEASESILVERBringing Next-Generation Entertainment to Y our HomeThe TX-NR636 wins prime position on your gear rack for three reasons. Firstly, it’s among one of the few A/V receivers to support Dolby Atmos ® multidimensional sound following a quick firmware update. Dolby Atmos very accurately places and moves sound around thecinema, including overhead, for a breathtakingly realistic movie experience. This receiver is also ready for Ultra HD streaming and 4K gaming at 60 fps with the latest 4K/60 Hz HDMI ® inputs and HDCP 2.2 compatibility. Qdeo ™ upscaling technology is included to convert low-res video into pin-sharp Full HD or Ultra HD. Secondly, it sounds incredible, with high-current Three-Stage Inverted Darlington Circuitry on the L/R/C channels for all-enveloping surround sound and musical two-channel audio. Thirdly, it’s simple to use with Wi-Fi ® and Bluetooth for universal audio streaming via PC, NAS, and mobiles, plus there’s a huge selection of music streaming services waiting for you to explore. Overlaid menus with InstaPrevue ™ technology make loading content quick and easy. Throw in a phono equalizer and Powered Zone 2 and you’ve got a value-packed powerhouse ready for the next wave of high-resolution entertainment.ADVANCED FEATURES• Supports New Dolby Atmos ®Format for Exciting Multidimensional Sound• 4K/60 Hz-Capable HDMI ® T erminals for Ultra HD Entertainment *1• Supports HDCP 2.2 for Future 4K/Full HD Video Streaming and Broadcast *2• Built-in Wi-Fi ® Certified Wireless LAN Capability • Bluetooth Version 2.1 + EDR Capability (Compatible Profile: A2DP v1.2, AVRCP v1.3) with Advanced Music Optimizer DSP T echnology• Three-Stage Inverted Darlington Circuitry for Front and Center Channels• HDMI ® Video Upscaling to 4K with Qdeo ™ Processing T echnology by Marvell• Internet Radio and Music Streaming Subscription Services Included (T uneIn Radio, Pandora ®, Spotify, AUPEO!, and Deezer)*3• Playback Compressed, Lossless, and Hi-res Audio via Local Network (MP3, WMA, WMA Lossless, FLAC, WAV , Ogg Vorbis, AAC, Apple Lossless, DSD 5.6 MHz, LPCM *4, and Dolby ® T rueH D)• Proprietary AccuEQ Room Calibration with Mic Included • Advanced Music Optimizer to Improve Compressed Digital Audio Quality (Bluetooth Included)• Control and Stream with Free Onkyo Remote Streaming Apps for iPod touch/iPhone *5 and Android Devices *6• Frontside MHL ™ for 1080p Video and Stills from Smartphone and T ablet• Input Source Preview with InstaPrevue ™ T echnology • PM Bass Boost for Deep Bass and Clear Mid-Range • Powered Zone 2 and Zone 2 Line-Out for Distributed Audio Playback in Another Room • Bi-Amping Capability for Front Channels*1 4K/60 Hz video is supported on HDMI inputs 1/2/3/4, the frontside input, Main Out, and Sub Out. *2 HDCP 2.2 is supported on HDMI Input 3 and Main Out only. *3 Availability of services depends on region. Some services may require a paid subscription and firmware update. Availability of third-party services advertised here is accurate at the time of publication, but may be subject tochange without notice. *4 LPCM is supported via DLNA only. *5 Compatible with iPod touch (3rd generation or later) and iPhone 3GS or later. All models require iOS 4.2 or later. *6 Requires Android OS 2.1 or later.AMPLIFIER FEATURES • 160 W/Ch (6 Ω, 1 kHz, 1% THD, 1 Channel Driven, IEC); 175 W/Ch (6 Ω, 1 kHz, 1 Channel Driven, JEITA)• WRAT (Wide Range Amplifier T echnology)• H.C.P .S. (High Current Power Supply) Massive HighPower T ransformer• Discrete Output Stage Circuitry• Optimum Gain Volume Circuitry • PLL (Phase Locked Loop) Jitter-Cleaning Circuit T echnology for S/PDIF Audio PROCESSING FEATURES• HDMI Support for 4K/60 Hz, 3D, Audio ReturnChannel, DeepColor ™, x.v.Color ™, LipSync, DolbyAtmos ®, Dolby ® T rueHD, DTS-HD Master Audio ™,DVD-Audio, Super Audio CD, Multichannel PCM, and CEC • Dolby ® T rueHD and DTS-HD Master Audio ™ Decoding • TI Burr-Brown 192 kHz/24-Bit DAC (8 Channels x 1)• Dual 32-Bit Digital Signal Processing Engines • 4 DSP Modes for Gaming: Rock, Sports, Action, and RPG • Theater-Dimensional Virtual Surround Function • CinemaFILTER ™• Direct Mode • Pure Audio Mode • Double Bass Function • Non-Scaling Configuration• A-Form Listening Mode MemoryCONNECTION FEATURES• 7 HDMI Inputs (1 Front/6 Rear) and 2 Outputs • USB Port (Front)• Mass Storage Class USB Memory Playback Capability • HDTV-Capable (720p/1080i) Component Video Switching (1 Input and 1 Output)• 3 Composite V ideo Inputs and 1 Output • 3 Digital Audio Inputs (1 Optical and 2 Coaxial)• 6 Analog Audio Inputs• Phono Input for T urntable Connection• 2 Parallel Subwoofer Pre-Outs • Color-Coded, Banana Plug-Compatible Speaker Posts OTHER FEATURES • Crossover Adjustment for Each Channel (40/50/60/70/80/90/100/120/150/200 Hz)• A/V Sync Control (Up to 400 ms in 10 ms Steps at 48 kHz)• Graphical Overlaid On-Screen Display (OSD) via HDMI with Quick Set-Up and Home Menu • Hybrid Standby Function with HDMI Passthrough • Smart Grid-Ready • T one Control (Bass/T reble) for Front L/R Channels • 3-Mode Display Dimmer (Normal/Dim/Dimmer)• RDS (PS/RT/PTY/TP) (European Model Only)• 40 FM/AM Random Presets• Certified with DLNA Version 1.5• Firmware Updates via Ethernet and USB • RIHD (Remote Interactive Over HDMI) for System Control •Preprogrammed RI (Remote Interactive) Remote Control Microphone forAccuEQTX-NR636 7.2-Channel Network A/V ReceiverSPECIFICATIONSAmplifier SectionPower Output All Channels 160 W/Ch (6 Ω, 1 kHz, 1% THD, 1 Channel Driven, IEC) 175W/Ch (6 Ω, 1 kHz, 1 Channel Driven, JEITA)Dynamic Power 240 W (3 Ω, Front) 210 W (4 Ω, Front) 120 W (8 Ω, Front)THD+N (T otal Harmonic Distortion + Noise) 0.08% (20 Hz–20 kHz, Half Power)Damping Factor 60 (Front, 1 kHz, 8 Ω)Input Sensitivity and Impedance 200 mV/47 k Ω (Line) 2.5 mV/47 k Ω (Phono MM)Rated RCA Output Level and Impedance 200 mV/2.2 k Ω (Line Out)Maximum RCA Output Level and Impedance 2.0 V/2.2 k Ω (Line Out)Phono Overload 70 mV (MM, 1 kHz, 0.5%)Frequency Response 5 Hz–100 kHz/+1 dB, -3 dB (Direct Mode)T one Control ±10 dB, 20 Hz (Bass) ±10 dB, 20 kHz (Treble)Signal-to-Noise Ratio 106 dB (Line, IHF-A) 80 dB (Phono MM, IHF-A)Speaker Impedance 4 Ω – 16 Ω or 6 Ω – 16 ΩVideo SectionInput Sensitivity/Output Level and Impedance Video 1.0 Vp–p/75 Ω (Component Y) 0.7 Vp–p/75 Ω (Component P B /C B , P R /C R ) 1.0 Vp–p/75 Ω (Composite)Component Video Frequency Response 5 Hz–100 MHz/+0 dB, -3 dB T uner SectionT uning Frequency Range FM 87.5 MHz–108 MHz AM 522 kHz–1,611 kHz530 kHz–1,710 kHz FM/AM Preset Memory40 StationsGeneralPower Supply AC 220−240 V~, 50/60 Hz (T aiwan Model: AC 120 V, 60 Hz)Power Consumption 630 W No-Sound Power Consumption 75 W Standby Power Consumption 0.15 WDimensions (W x H x D) 435 x 173.5 x 329 mm Weight 10.5 kgCARTONDimensions (W x H x D) 570 x 297 x 423 mm Weight 13.0 kgSupplied Accessories• Indoor FM antenna • Antenna isolator • AM loop antenna • Color labels for speaker cables • Speaker setup microphone • Instruction manual • Remote controller • AA (R6) batteries x 2*Included with Chinese model only.**Not included with Chinese model.Kitahama Chuo Bldg. 2-2-22 Kitahama, Chuo-ku, Osaka 541-0041 JAPAN /Unit 19, Building 6, Croxley Green Business Park, Hatters Lane, Watford Hertfordshire, WD18 8YH UNITED KINGDOM Tel: +44(0)1628-473350 Fax: +44(0)1628-401700 /Liegnitzerstrasse 6, 82194 Grobenzell, GERMANY Tel: 49-8142-4208-10 Fax: 49-8142-4208-202 /Unit 1033, 10/F., Star House, No. 3, Salisbury Road, Tsim Sha Tsui, Kowloon, Hong Kong, CHINA Tel: 852-2429-3118 Fax: 852-2428-9039 (Hong Kong) (Mainland)Due to a policy of continuous product improvement, Onkyo reserves the right to change specifications and appearance without notice. Manufactured under license from Dolby Laboratories. Dolby, Atmos, and the double-D symbol are trademarks of Dolby Laboratories. For DTS patents, see . Manufactured under license from DTS Licensing Limited. DTS, DTS-HD, the Symbol, & DTS and the Symbol together are registered trademarks, and DTS-HD Master Audio is a trademark of DTS, Inc. © DTS, Inc. All Rights Reserved. HDMI, the HDMI logo, and High-Definition Multimedia Interface are trademarks or registered trademarks of HDMI Licensing LLC in the United States and other countries. iPhone, iPod, iPod classic, iPod nano, iPod shuffle, and iPod touch are trademarks of Apple Inc., registered in the U.S. and other countries. Apple is not responsible for the operation of this device or its compliance with safety and regulatory standards. Please note that the use of this device with iPod or iPhone may affect wireless performance. Android is a trademark of Google Inc. InstaPrevue and the InstaPrevue logo are trademarks or registered trademarks of Silicon Image, Inc. in the United States and other countries. MHL, the MHL Logo, and Mobile High-Definition Link are trademarks or registered trademarks of MHL LLC in the United States and other counties. Qdeo and QuietVideo are trademarks of Marvell or its affiliates. The Bluetooth word mark and logos are owned by the Bluetooth SIG, Inc. WRAT , Music Optimizer, CinemaFILTER, Theater-Dimensional, and AccuEQ are trademarks of Onkyo Corporation. All other trademarks and registered trademarks are the property of their respective holders.N P R N o . 14N 05 01/14Text on receiver may vary with region.Dolby Atmos ® Multidimensional SoundOnkyo is among the first to introduce Dolby Atmos sound to home cinemas. Dolby Atmos uses object-oriented mixing techniques to layer independent audio elements through discrete channels, placing and moving sound effects above and around the listener with astonishing realism. The format adapts to any home cinema layout augmented by two or more in-ceiling height speakers or Dolby Atmos-enabled front speakers to bring sound alive from all directions.Future-Ready with the Latest HDMI®Imagine playing the latest RPG blockbuster on your Ultra HDTV at a breathtaking 60 frames per second. Now add thunderous 7.2-channel surround sound from Onkyo. With HDMI terminals on your TX-NR636 receiver supporting 4K/60 Hz, this dream can be your reality. Even if you’re not planning on upgrading your current display right away, it’s good to know your receiver is ready for the future.Supports HDCP 2.2 for 4K Streaming and TVWith Hollywood studios, satellite TV broadcasters, and video streaming services announcing a move to HDCP 2.2 copy protection for future 4K and Full HD releases, it’s important that your A/V receiver can handle this new standard. The TX-NR636 is one of the first A/V receivers to support HDCP 2.2, making it ready for next-generation Ultra HD streaming and broadcasting.4K Video Upscaling with Qdeo ™ T echnologyThe TX-NR636 features Qdeo ™technology from Marvell to upscale low-res video to liquid-smooth 1080p (for HDTV) and 4K (3840 x 2160 pixels) with a compatible display. This means video from older gaming consoles and DVD players looks clean and sharp, giving old favorites a new lease on life.Wi-Fi ®and Bluetooth InsideThe TX-NR636 has Wi-Fi and Bluetooth technology built in. Complete the setup, download our control app, and you’ve got a graphic remote control and range of streaming features in the palm of your hand. Or pair your Bluetooth-capable device and stream almost any audio to your home cinema. With Advanced Music Optimizer enhancement, music via Bluetooth has never sounded so good.Stream Direct from Smartphone and T abletFor lossless audio streaming, just tap on the Onkyo Remote App icon on your smartphone to find your music loaded and ready to stream with all the controls you’re used to. The receiver can switch on and select your preferred playback mode automatically.Stream Network-Attached Hi-res AudioOnkyo A/V receivers are engineered for universal hi-res compatibility and ease of use. Use the remote app to locate your 192/24 and 96/24 albums (including 5.6 MHz DSD playback) on PC or NAS and bask in the clarity, depth, and detail of high-resolution music.Built-in Internet Radio and StreamingIf you can think of it, you’ll most likely be able to stream it. The receiver includes Spotify, AUPEO!, TuneIn, and now Deezer, the music subscription service available in over 200 countries and boasting a library of 30 million songs. Y ou can search for available music using your free Onkyo remote app.Play Lossless Music from USBThe front-panel USB port also plays almost any audio format from mass-storage-class drives. As well as compressed files, there’s support for FLAC, WAV, ALAC, Dolby ® TrueH D(48 kHz), and DSD. Y ou can also connect a PC, smartphone, or music player using one of the many digital and analog inputs.Engineered for High FidelityWRAT (Wide Range Amplifier T echnology) is all about high current. Y ou need it to stay in control when speaker impedance fluctuates, and to grip without clipping as the soundtrack explodes into action. We use a massive high-power transformer driving ultra-low-distortion Three-Stage Inverted Darlington Circuitry *. Combined with high-resolution processing, the TX-NR636 packs a colossal punch for movies while retaining musicality for two-channel playback.* Front and center channels only.MHL ™ for Mobile Device ConnectionAn HDMI/MHL terminal is included to connect smartphones and other electronic devices, allowing you to display 1080p video and other media on your HDTV with 7.1 channels of surround sound.Powered Multi-Zone Audio and Bi-AmpingPowered Zone 2 speaker terminals (and a Zone 2 line-out) let you power audio in another room equipped with stereo speakers. Y ou can also assign surround back channels to bi-amp your front loudspeakers.Fast Switching and AdjustmentIf you want to quickly adjust a speaker level, switch DSP modes, or change inputs, the “Q” remote control button does it in seconds by overlaying a simple transparent menu on screen. Use InstaPrevue ™ technology to preview content playing on any HDMI-connected component—the overlaid video thumbnails are great for keeping an eye on a cable channel while you’re watching a Blu-ray, for example, and also make video switching very clear and simple.AccuEQ Room CalibrationAccuEQ optimizes surround-sound and two-channel audioto suit your listening space. In particular, AccuEQ extracts the best possible performance from your front speakers to make stereo listening more dynamic and exciting. The system analyzes speaker setup and room acoustics from one listening position (which simplifies the calibration process) and optimizes frequency response and output levels for maximum clarity.。
IEEETransactionsonSmartGrid
MARCH2012VOLUME3NUMBER1ITSGBQ(ISSN1949-3053)REGULAR PAPERSHierarchical Fuzzy Logic System for Implementing Maintenance Schedules of Offshore Power Systems................. .................................................................................C.S.Chang,Z.Wang,F.Yang,and W.W.Tan3 Investigation of Economic and Environmental-Driven Demand Response Measures Incorporating UC.................... ......................................A.Abdollahi,M.Parsa Moghaddam,M.Rashidinejad,and M.K.Sheikh-El-Eslami12 Flexible Charging Optimization for Electric Vehicles Considering Distribution Grid Constraints........................... ....................................................................................................O.Sundström and C.Binding26 A Controlled Filtering Method for Estimating Harmonics of Off-Nominal Frequencies..................................... ........................................ C.A.G.Marques,M.V.Ribeiro,C.A.Duque,P.F.Ribeiro,and E.A.B.da Silva38 Coordinated Energy Cost Management of Distributed Internet Data Centers in Smart Grid................................. ...............................................................................................L.Rao,X.Liu,L.Xie,and W.Liu50 Wide-Area Measurement Based Dynamic Stochastic Optimal Power Flow Control for Smart Grids With High Variabilityand Uncertainty.......................................................J.Liang,G.K.Venayagamoorthy,and R.G.Harley59 Optimal Combined Bidding of Vehicle-to-Grid Ancillary Services...................E.Sortomme and M.A.El-Sharkawi70 Residential Appliances Identification and Monitoring by a Nonintrusive Method..................Z.Wang and G.Zheng80(Contents Continued on page1)(Contents Continued from Front Cover)Modes of Operation and System-Level Control of Single-Phase Bidirectional PWM Converter for Microgrid Systems.. ...................................D.Dong,T.Thacker,I.Cvetkovic,R.Burgos,D.Boroyevich,F.F.Wang,and G.Skutt93 Generation-Load Mismatch Detection and Analysis...............................................R.M.Gardner and Y.Liu105 A Fault Location Technique for Two-Terminal Multisection Compound Transmission Lines Using Synchronized Phasor Measurements................................................................C.-W.Liu,T.-C.Lin,C.-S.Yu,and J.-Z.Yang113 Modeling and Control System Design of a Grid Connected VSC Considering the Effect of the Interface Transformer Type.................................................................................................H.Mahmood and J.Jiang122 Profile of Charging Load on the Grid Due to Plug-in Vehicles................S.Shahidinejad,S.Filizadeh,and E.Bibeau135 Sizing of Energy Storage for Microgrids...........................................S.X.Chen,H.B.Gooi,and M.Q.Wang142 On the Accuracy Versus Transparency Trade-Off of Data-Mining Models for Fast-Response PMU-Based Catastrophe Predictors.........................................................................I.Kamwa,S.R.Samantaray,and G.Joós152 Optimal Power Allocation Under Communication Network Externalities..................................................... ..........................................................................M.G.Kallitsis,G.Michailidis,and M.Devetsikiotis162 Optimal PMU Placement by an Equivalent Linear Formulation for Exhaustive Search...................................... ......................................................S.Azizi,A.S.Dobakhshari,S.A.Nezam Sarmadi,and A.M.Ranjbar174 Towards Optimal Electric Demand Management for Internet Data Centers................J.Li,Z.Li,K.Ren,and X.Liu183 High Level Event Ontology for Multiarea Power System....................Y.Pradeep,S.A.Khaparde,and R.K.Joshi193 Linear Active Stabilization of Converter-Dominated DC Microgrids..........A.A.A.Radwan and Y.A.-R.I.Mohamed203 Analysis and Methodology to Segregate Residential Electricity Consumption in Different Taxonomies................... ...............................................................................J.D.Hobby,A.Shoshitaishvili,and G.H.Tucci217 Quality of Optical Channels in Wireless SCADA for Offshore Wind Farms..........................................X.Liu225 Calculating Frequency at Loads in Simulations of Electro-Mechanical Transients........J.Nutaro and V.Protopopescu233 Smart“Stick-on”Sensors for the Smart Grid........................................R.Moghe,mbert,and D.Divan241 The Load as an Energy Asset in a Distributed DC SmartGrid Architecture....R.S.Balog,W.W.Weaver,and P.T.Krein253 A Network Decoupling Transform for Phasor Data Based V oltage Stability Analysis and Monitoring..................... .............................................................................W.Xu,I.R.Pordanjani,Y.Wang,and E.Vaahedi261 A Two Ways Communication-Based Distributed Control for V oltage Regulation in Smart Distribution Feeders.......... ........................................................................H.E.Z.Farag,E.F.El-Saadany,and R.Seethapathy271 Investigation of Domestic Load Control to Provide Primary Frequency Response Using Smart Meters.................... .................................................................................K.Samarakoon,J.Ekanayake,and N.Jenkins282 SPECIAL SECTION ON TRANSPORTATION ELECTRIFICATION AND VEHICLE-TO-GRID APPLICATIONS GUEST EDITORIALSpecial Section on Transportation Electrification and Vehicle-to-Grid Applications................................A.Emadi295SPECIAL SECTION PAPERSA Novel Integrated Magnetic Structure Based DC/DC Converter for Hybrid Battery/Ultracapacitor Energy Storage Systems.............................................................................................O.C.Onar and A.Khaligh296 Performance Evaluation of an EDA-Based Large-Scale Plug-In Hybrid Electric Vehicle Charging Algorithm............ ............................................................................................................W.Su and M.-Y.Chow308 Source-to-Wheel(STW)Analysis of Plug-in Hybrid Electric Vehicles....S.G.Wirasingha,R.Gremban,and A.Emadi316 Prototype Design and Controller Implementation for a Battery-Ultracapacitor Hybrid Electric Vehicle Energy Storage System..........................................................................................Z.Amjadi and S.S.Williamson332 PEV Charging Profile Prediction and Analysis Based on Vehicle Usage Data................................................ ......................................................................A.Ashtari,E.Bibeau,S.Shahidinejad,and T.Molinski341 Optimal Scheduling of Vehicle-to-Grid Energy and Ancillary Services..............E.Sortomme and M.A.El-Sharkawi351 Online Estimation of State of Charge in Li-Ion Batteries Using Impulse Response Concept................................ .......................................................................A.H.Ranjbar,A.Banaei,A.Khoobroo,and B.Fahimi360 Load Scheduling and Dispatch for Aggregators of Plug-In Electric Vehicles........D.Wu,D.C.Aliprantis,and L.Ying368 Catenary V oltage Support:Adopting Modern Locomotives With Active Line-Side Converters............................. ........................................................................................B.Bahrani,A.Rufer,and M.Aeberhard377 An Optimized EV Charging Model Considering TOU Price and SOC Curve................................................. ..................................................................Y.Cao,S.Tang,C.Li,P.Zhang,Y.Tan,Z.Zhang,and J.Li388(Contents Continued on page2)(Contents Continued from page1)Spatial and Temporal Model of Electric Vehicle Charging Demand...............................S.Bae and A.Kwasinski394 Study of PEV Charging on Residential Distribution Transformer Life......................................................... ......................................................................Q.Gong,S.Midlam-Mohler,V.Marano,and G.Rizzoni404 Evaluation and Efficiency Comparison of Front End AC-DC Plug-in Hybrid Charger Topologies.......................... .......................................................................F.Musavi,M.Edington,W.Eberle,and W.G.Dunford413 Design of a Novel Wavelet Based Transient Detection Unit for In-Vehicle Fault Determination and Hybrid Energy Storage Utilization.........................................................C.Sen,ama,T.Carciumaru,X.Lu,and N.C.Kar422 Vehicle-to-Aggregator Interaction Game..........................................C.Wu,H.Mohsenian-Rad,and J.Huang434 Optimized Bidding of a EV Aggregation Agent in the Electricity Market..................................................... .....................................................................R.J.Bessa,M.A.Matos,F.J.Soares,and J.A.P.Lopes443 Coordinating Vehicle-to-Grid Services With Energy Trading..............................A.T.Al-Awami and E.Sortomme453 Energy Management Optimization in a Battery/Supercapacitor Hybrid Energy Storage System............................ ...........................................................................................M.-E.Choi,S.-W.Kim,and S.-W.Seo463 BEVs/PHEVs as Dispersed Energy Storage for V2B Uses in the Smart Grid......C.Pang,P.Dutta,and M.Kezunovic473 An Evaluation of State-of-Charge Limitations and Actuation Signal Energy Content on Plug-in Hybrid Electric Vehicle, Vehicle-to-Grid Reliability,and Economics...................................C.Quinn,D.Zimmerle,and T.H.Bradley483 Modeling of Plug-in Hybrid Electric Vehicle Charging Demand in Probabilistic Power Flow Calculations................ ............................................................................................................G.Li and X.-P.Zhang492 The Evolution of Plug-In Electric Vehicle-Grid Interactions......................................D.P.Tuttle and R.Baldick500 Methodology to Analyze the Economic Effects of Electric Cars as Energy Storages......................................... ssila,J.Haakana,V.Tikka,and J.Partanen506 An Economic Analysis of Used Electric Vehicle Batteries Integrated Into Commercial Building Microgrids............. .............................................S.Beer,T.Gómez,D.Dallinger,I.Momber,C.Marnay,M.Stadler,and i517 Transport-Based Load Modeling and Sliding Mode Control of Plug-In Electric Vehicles for Robust Renewable Power Tracking............................................................................................S.Bashash and H.K.Fathy526 Intelligent Energy Resource Management Considering Vehicle-to-Grid:A Simulated Annealing Approach.............. ..........................................................................T.Sousa,H.Morais,Z.Vale,P.Faria,and J.Soares535 Grid Integration of Electric Vehicles and Demand Response With Customer Choice........................................ ...............................................................................S.Shao,M.Pipattanasomporn,and S.Rahman543 Analysis of the Filters Installed in the Interconnection Points Between Different Railway Supply Systems............... ......................................................................................................M.Brenna and F.Foiadelli551 Autonomous Distributed V2G(Vehicle-to-Grid)Satisfying Scheduled Charging............................................. ............................................Y.Ota,H.Taniguchi,T.Nakajima,K.M.Liyanage,J.Baba,and A.Yokoyama559 Implementation of Vehicle to Grid Infrastructure Using Fuzzy Logic Controller.........M.Singh,P.Kumar,and I.Kar565。
多级移动曲面拟合LIDAR数据滤波算法

图 2 HMCFA 滤波算法工作流程图
而定, 如果参考点内有一点误差较大, 则所求出的 拟合曲面也会有较大的误差。鉴于这个原因, 本研 究采用最小二乘法, 利用测量上的多余观测的观念 求解拟合曲面参数。利用这种方法可获得误差平方 最小的一组参数解, 即最优解。
(5) 选择合理的插值方法, 估算非地面点处的 高程值, 得到研究区内的地形恢复结果。
算法的具体流程如图 2, 所谓的多级移动曲面 拟合滤波, 主要是指使用不同大小窗口的区块进行 多次滤波, 逐渐将地物点滤除。在滤波的过程中区 块大小的设定跟研究区内的最大建筑的尺寸有关系, 如果滤波的尺寸过大, 则会使一些真实的地面点滤 除掉, 这样就损失了一些详细的地表信息; 反之, 如果滤波的尺寸过小, 较大尺寸建筑物中心的高程 点则会被判断为真实的地面点而保留下来, 这样会 使地形的恢复严重失真。
1m 垂直方向 15cm, 水平方向是 30cm, 有明显 的地面定标标志
ASCII
3 HMCFA 滤波算法
3.1 算法原理
所分析 LIDAR 数据点是地面点还是非地面点 的判断标准是: 寻求一定尺寸的窗口内的最低点后, 扩展到 4×4 个同样大小的相邻窗口, 这样就得到 16 个最低点, 建立二次多项式, 通过表面拟合运算得 到粗的地面模型; 然后再将窗口尺寸扩大, 通过多 次迭代得到较为精细的地面模型。迭代过程能够获 得较为精细的地面高程模型的原理是: 较大窗口内 的最低点属于地面的概率要高于较小窗口内的最低 点的概率, 在利用小尺寸窗口过滤掉较高地物点的 基础上, 逐渐细化, 最终完成非地面点的滤除。
2
Journal of Remote Sensing 遥感学报 2009, 13(5)
据进行二维空间排序, 在将地物点过滤的同时进行 产生 DEM(digital elevation model)。李瑞林和李涛 (2007)提出的多层次滤波算法共分 3 个步骤: 首先 对 原 始 LIDAR 数 据 进 行 规 则 化 处 理 , 生 成 DSM(digital surface model); 然后对 DSM 按单元进 行一些操作, 得到初始 DTM; 最后利用梯度阈值 操作, 进行 DTM 平滑。刘琪等则以森林为研究对 象, 利用全部数据生成地表的数字表面模型后反 复运算并逐渐逼近, 提取小于阈值的数据生成修 正的表面模型, 从而达到数据滤波并完成地形恢 复目的(Liu 等, 2008)。梁欣廉等(2007)发展了一种 应用于城市区域的分层自适应形态学滤波方法, 采 用三个不同分辨率、不同地形/地物特点的数据集进 行实验, 并解决了窗口尺寸限制、粗差误判等问题。 本文在综合借鉴上述算法优点的基础上, 发展 HMCFA (hierarchical moving curved fitting algorithm) 多级移动曲面拟合滤波算法, 提高城市区 LIDAR 数 据滤波的精度。
基于Fisher比的梅尔倒谱系数混合特征提取方法_鲜晓东

在 MFCC 参数中,滤波器组主要分布于低频部分,注重于
语音的低频频谱,对于中高频的频谱信息计算精度较差,造成
最终提取的参数不能最大限度地表征语音的特征。为了提高 中高频的计算精度,先后提出了逆梅尔倒谱参数( IMFCC) [5] 和中频梅尔倒谱参数( MidMFCC) [6]。这两种参数与经典的
MFCC 的不同主要在 Mel 刻度与 Hz 刻度的转换上,IMel 刻度
关键词: 识别精度; 梅尔倒谱系数; 逆梅尔倒谱系数; 中频梅尔倒谱系数; Fisher 准则 中图分类号: TP391 文献标志码: A
Parameter extraction method for Mel frequency cepstral coefficients based on Fisher criterion
评价特征参数中不同分量对识别的贡献一般有两种方 法,通过各个分量的 Fisher 比得到各分量的区分能量,或者通 过增减分量的 方 法 判 断 每 个 特 征 分 量 的 贡 献[8]。 甄 斌 等[9] 采用增减特征分量的方法研究了 MFCC 各维倒谱分量对说话 人识别和语音识别的贡献,但是通过增减特征分量的方法计 算量较大,同 时 受 环 境 及 语 音 识 别 的 影 响 较 大,因 此 利 用 Fisher 准则来分析特征向量,确定特征分量的可分离性是一 种常用的特征选择方法。张芸等[10]利用 Fisher 准则对 LPCC
光无源器件介绍

第二十五页,共39页
lHybrid
vHybrid分类
根据图13中的功能集成方案,Hybrid有很多种类,此处仅列出几种无源集 成Hybrid。
ØWDM+Isolator
signal
signal+pump
pump 接掺铒光纤 图14.正向泵浦的WDM+Isolator
隔离。
2
1
21
3
3 三端口环形器
4 四端口环形器
图6.光环形器中的信号光流向
第十四页,共39页
l光环形器
v光环形器应用 用于密集波分复用系统、单纤双向传输、光时阈反射计( OTDR)、色散补偿器。
1、2n
1、2 m-1、m+1 n
FBG m
图7.光环形器用于密集波分复用系统
Tx
Rx
Rx
Tx
图8.光环形器用于单纤双向传输
第四页,共39页
l光纤准直器
v准直器应用 光隔离器、光环形器、光开关、光衰减器、波分复用 器,保偏准直器可用于偏振合束器中
Metal Tube
Glass Tube
Pigtail
图2.准直器结构
第五页,共39页
Lens
l光纤准直器
v准直器参数 Ø工作波长和工作带宽 Ø插入损耗(Insertion Loss,IL)
第三页,共39页
Capillary
l光纤准直器
v准直器分类 Ø按准直透镜分类 G-Collimator、C-Collimator、D-Collimator Ø按尺寸分类
普通型和Mini型
Ø按尾纤类型分类
单模光纤准直器、多模光纤准直器
电子英语词汇(f)fprom现场可编程序只读存储器fscopef型显示器

电子英语词汇(F) f prom 现场可编程序只读存储器f scope f型显示器f/f 触发电路fabrication facilities 生产设备fabrication processing 工艺处理fabry perot laser 法布里珀罗激光器face 晶面face centered lattice 面心立方晶格face centred cubic lattice 面心立方晶格f prom 现场可编程序只读存储器f scope f型显示器f/f 触发电路fabrication facilities 生产设备fabrication processing 工艺处理fabry perot laser 法布里珀罗激光器face 晶面face centered lattice 面心立方晶格face centred cubic lattice 面心立方晶格face down bonding 倒装焊接face down chip 倒装芯片face down integrated circuit 倒装芯片集成电路faceplate 面板facility 设备facsimile 传真facsimile apparatus 传真机facsimile coding 传真编码facsimile communication 传真通信facsimile equipment 摹写通信设备facsimile information 传真信息facsimile network 传真网facsimile picture 传真图像facsimile receiver 传真接收机facsimile system 传真系统facsimile telegram 传真电报facsimile telegraphy 传真电报facsimile transmitter 传真发送机factor 倍增器factory programmable chip 制造厂家可编程序集成电路factory programmable read only memory 制造厂家可编程序只读存储器fade in 淡入fadeout 淡出fader 音量控制器fading 衰减fading by absorption 吸收衰落fading by interference 干扰性衰落fading compensate antenna 抗衰落犬线failure 故障failure rate 故障率false 错误的false echoes 假回波false signal 错误信号family 族family of characteristics 特性曲线族famos 浮栅雪崩注入型金属氧化物半导体fan aerial 扇形天线fan antenna 扇形天线fan in 扇入端数fan marker 扇形指示器fan out 扇出端输数fan out capability 扇出能力far contact printer 接近式曝光装置far end crosstalk 运端串扰far infrared laser 远红外激光器far infrared radiation 远红外辐射far infrared ray 远红外线far ultraviolet laser 远紫外激光器far ultraviolet radiation 远紫外辐射far uv laser 远紫外激光器faraday cylinder 法拉第圆筒faraday rotation 法拉第旋转fast coincidence circuit 高速符合电路fast detector 快速探测器高速检测器fast diffusant 快扩散杂质fast electron 快电子fast fourier transform 快速傅里叶变换fast pumpdown 高速抽气fast resist 高灵敏光刻胶fast response 快速响应fatigue 疲劳fatigue failure 疲劳破坏fault 故障fault localization 故障探测fault locating 故障探测fault tolerance 失效容差faultless mask 无缺陷掩模fax 传真fax communication 传真通信fdisply f型显示器fdm 频分多路传输fdx 全双工fdx operation 双工工作feature 结构元件feature dimension 形体尺寸feature edge 形体边缘feature placement 形体布置feed 供给feed holes 输送孔feedback 反馈feedback amplifier 反馈放大器feedback circuit 反馈电路feedback coil 回授线圈feedback factor 反馈系数feedback loop 反馈电路feedback network 反馈电路feedback oscillator 反馈振荡器feedback ratio 反馈系数feedback resistance 反馈电阻feeder 馈电线;给料器馈电装置feedforward 正反馈feeding 供给fermi distribution 费米迪拉克分布fermi level 费米能级ferrimagnetism 铁氧体磁性ferrite 铁氧体ferrite circulator 铁氧体循环器ferrite film 铁氧体薄膜ferrite phase modulator 铁氧体掂器ferrite phase shifter 铁氧体移相器ferrite resonator 铁氧体谐振器ferrite rod antenna 铁氧体棒形天线ferrite switch 铁氧体开关ferrite waveguide 铁氧体波导管ferroelectric 铁电体ferroelectric film 铁电薄膜ferroelectricity 铁电性ferromagnet 铁磁体ferromagnetic film 铁磁膜ferromask 氧化铁掩模fet 场效应晶体管fet amplifier 场效应晶体管放大器fet array 场效应晶体管阵列fet channel 场效应晶体管沟道fet input 输入场效应晶体管fet oscillator 场效应晶体管振荡器ff 触发电路fgt 浮栅金属氧化物半导体晶体管fiber 纤维fiber axis 纤维轴fiber cable 纤维光缆的fiber core 纤维芯fiber glass 玻璃纤维fiber glass epoxy laminate 玻璃纤维环氧尸迭层板fiber glass optics 玻璃纤维光学fiber laser 纤维激光器fiber loss 纤维损失fiber optic cable 纤维光缆的fiber optic sensor 光学纤维敏感元件fiber optic system 光学纤维系统fiber optics communication 光学纤维通信fibl 聚焦离子束光刻fic 膜集成电路fidelity 准俑fiducial cross 基准十字标线fiducial mark 对准记号field 场field alterable control element 现场可变控制元件field blanking 场消隐field by field alignment 芯片的分步重复对准field component 场分量field convergence 场会聚field deflection 场偏转field deflection oscillator 场偏转振荡器field desorption 场解吸field distribution 场分布field divider 场分频器field effect 场效应field effect device 场效应掐field effect phototransistor 场效应光电晶体管field effect tetrode 四极场效应晶体管field effect transistor 场效应晶体管field emission 电场发射field emission cathode 场致发射阴极field emission electron microscope 场致发射电子显微镜field emission ion microscope 场致发射离子显微镜field emission microscope 场致发射显微镜field emitter 场致发射阴极field evaporation 场致蒸发field frequency 场频field insulation 场氧化物隔离field inversion 电场反转field ion emission 场致离子发射field ionization gauge 场致电离真空计field of view 视野field oxidation 场氧化field oxide film 场氧化膜field oxide implantation 场氧化层离子注入field oxide isolator 场氧化绝缘层field oxide region 场氧化区field pick up 室外摄影field programmable logic array 现场可编程序逻辑阵列field programmable logic family 现场可编程序逻辑集成电路系列field programmable logic integrated circuit 现场可编程序逻辑集成电路field programmable read only memory 现场可编程序只读存储器field quantum 场量子field strength 场强field strength meter 场强计field synchronization 场同步fieldistor 场效应晶体管fight path computer 飞行航线计算机filament 灯丝filament voltage 灯丝电压filamentary cathode 直热式阴级filamentary transistor 线状晶体管filled adhesive 填充的粘合剂filled band 满带filled level 满带能级filled shell 满壳层filler 填料filling 填充filling factor 线圈间隙因数film 薄膜film carrier 膜形载体film carrier assembly 膜式载体组装film carrier bonding 膜形载体上芯片接合film chip carrier 膜形芯片载体film circuit assembly 薄膜电路组装film circuitry 薄膜电路film conductor 薄膜导体film electronics 薄膜电子学film integrated circuit 膜集成电路film mounted ic 膜载组装的集成电路film reader 影片扫描器影片阋读机film resistor 薄膜电阻器film scanner 影片扫描器影片阋读机film technique 薄膜工艺film waveguide 薄膜波导管filter 滤波器filter choke 滤波扼力filter hybrid 滤波旗合电路filtering 滤波fin 散热片final amplifer 终端放大器final inspection 最后检查final selector 终接器final smoothing 最终精磨final stage 末级final state 最终状态final vacuum 极限真空度final yield 最后成品率finder 无线电测向器finding 搜索寻线fine adjustment 微调fine alignment 精密对准fine control 精密控制fine featured resist 精细结构光刻用抗蚀剂fine finish 精加工fine geometry mask 细致几何形状掩模fine grain 细粒fine leak 微弱漏fine line 细线fine line definition 精细线形成fine line emulsion 高分辨力乳胶fine line geometry 精细线几何尺寸fine line integrated circuit 精细线集成电路fine line lithography 细线光刻fine line metallization 精细线金属化fine line pattern 精细线图形fine line resolution 细线分辨力fine linewidth pattern 精细线图形fine link mask 细致几何形状掩模fine pattern fabrication 精细图案制造fine pattern geometry 精细线几何尺寸fine pattern integrated circuit 精细线集成电路fine pattern printing 细线光刻fine registration 精密对准fine tuning 细调finger 梳形物finger gate 梳状栅finish 精加工finish machining 最后加工finishing groove 精加工槽finned heat sink 翅式散热片fip 固定互连图像fipos 多孔氧化硅完全隔离firing 点火firing profile 烧结温度分布图firing temperature 烧成温度firmware building block 固件构成分程序first anode 第一阳极fissure 微裂纹fitting 匹配five unit code 五单位制电码fixed aerial 固定天线fixed antenna 固定天线fixed attenuator 固定衰减器fixed capacitor 固定电容器fixed carrier 固定载劣fixed charge 固定电荷fixed echo 固定目标的回波fixed error 系统错误fixed frequency 标定频率fixed frequency cyclotron 固定频率回旋加速器fixed frequency laser 固定频率激光器fixed grid 固定格栅fixed interconnection pattern 固定互连图像fixed interconnection pattern approach 固定互连图像方法fixed interconnections 固定布线fixed pattern metallization 固定图案金属化fixed programming 固定程序设计fixed resistor 固定电阻器fixed service 定点通信业务fixed target 固定目标fixed wiring 固定布线fixing 固定fixture 安装用具fl prom 熔丝连接可编程序只读存储器flag 标志flame excitation 火焰激发flame spectrum 火焰光谱flange coupling 法兰连接flap attenuator 刀型衰减器flash 闪光flash compression 爆炸压缩flash duration 闪光持续时间flash evaporation 快速蒸发flash evaporator 闪蒸蒸发器flash getter 蒸发吸气剂flash point 闪点flash test 高压绝缘试验flash tube 闪光管flashlamp 闪光灯flashtube 闪光灯flat band 平带flat cable 带状电缆flat mirror 平面镜flat pack 扁平管壳flat pack assembler 扁平封装装置flat pack integrated circuit 扁平封装集成电路flat package 扁平管壳flat panel display device 平面显示掐flat top aerial 平顶天线flat top antenna 平顶天线flat tuning 粗调平直党flating potential grid 自由栅极flatness checker 平面度检测器flaw 裂纹fleming valve 佛莱铭管flexibility 柔顺性flexible carrier 软性载体flexible coupling 弹性连接flexible machining system 灵活加工系统flexible printed circuit 软性印制电路flexible programming 软程序设计flexible waveguide 可弯曲波导管flicker 闪烁flicker effect 闪变效应flicker frequency 闪烁频率flicker noise 闪变噪声flight simulator 飞行摸拟器flip chip 倒装芯片flip chip approach 倒装法flip chip bonder 倒装焊接机flip chip bonding 倒装焊接flip chip bump 倒装芯片隆起焊盘flip chip carrier 倒装芯片座flip chip integrated circuit 倒装芯片集成电路flip chip method 倒装法flip flop 触发电路flip flop circuit 触发电路float zone crystal 浮区熔化晶体float zone growth 浮区生长float zone method 浮区提纯法floated 浮动的floating 浮动的floating crucible technique 浮置坩埚技术floating gate 浮置栅极floating gate avalanche injection mos 浮栅雪崩注入型金属氧化物半导体floating gate fet 浮栅场效应晶体管floating gate ic 浮栅集成电路floating gate mos 浮栅金属氧化物半导体floating gate silicon process 浮栅硅金属氧化物半导体工艺floating gate transistor 浮栅金属氧化物半导体晶体管floating grid 自由栅极floating island 浮岛floating junction 浮动结floating point calculation 浮动小数点运算floating zone melting 浮区熔化floating zone refining 浮区提纯floating zone silicon 浮区熔化硅floating zone techique 浮区提纯法floating zone technique 浮区提纯技术flood exposure 整片曝光floor planning 元件平面布置flow 流flow of electrons 电子流flow soldering 射粮接flow temperature 怜温度flowing gas laser 气两激光器fluctuating signal 起伏信号fluctuation noise 起伏噪声fluctuations 起伏现象fluid free vacuum 无油真空fluid sensor 铃传感器fluidity 怜性fluidized bed coating 怜层涂法fluidized bed packaging 怜层密封fluorescence spectrum 荧光光谱fluorescent lamp 荧光灯fluorescent screen 荧光屏fluorite 萤石flusher 冲洗器flutter 颤动;电视图象的颤动现象flutter effect 颤动效应flux 焊剂flux free bonding 无焊药焊接flux free soldering 无焊药焊接fluxer 焊剂涂敷器fluxing agent 焊剂flyback 光的回程flyback blanking 逆程消隐flying spot scanner 飞点扫描器flying spot scanning 飞点扫描法flywheel synchronization 飞轮同步fm 频率灯fm radar 档雷达fm receiver 档接收机focal distance 焦距focal length 焦距focal spot 焦点focus 焦点focus rays 集聚射线focused beam laser 聚焦束激光器focused ion beam lithography 聚焦离子束光刻focusing 聚焦focusing by accelerating field 加速场聚焦focusing coil 聚焦线圈focusing electrode 聚焦电极focusing field 聚集场focusing magnet 聚焦磁铁focusing system 聚集装置;聚焦系统focusing unit 聚焦装置fog 黑斑folded dipole 折合偶极子forbidden band 禁带forbidden bandwidth 禁带宽度forbidden gap 禁带宽度forbidden line 禁线forbidden transition 禁戒跃迁forced air cooling 强制空气冷却forced betatron oscillation 受迫自由振荡forced circulation 强制循环forced vibrations 强制振动forced water circulation 强制水循环forecast 预告forecasting 预报foreign atom 异类原子foreign material 异物foreign substrate 异质衬底form 表格formant 共振峰formants 特盏率formative time 建立时间former 成形机forming 成形formular 表格forward bias 正偏forward bias conduction 正偏压导电forward biased current 正向偏压电流forward biased diode 正向偏压二极管forward biased junction 正向偏压结forward channel 前向信道forward characteristic 正向特性forward current 正向电流forward direction 通两向forward impedance 正向阻抗forward path 前向信道forward resistance 正向电阻foundry customer 专用集成电路用户four bit chip 四位微处理机芯片four layer transistor 四层晶体管four level laser 四能级激光器four phase logic 四相逻辑four point probe 四点探针four point probe measurement 四探针测量four point probe technique 四探针技术four pole 四极four pole equivalent network 四端网络等效电路four wire circuit 四线线路four wire line 四线线路four wire repeater 四线制增音器four wire terminating set 四线二线变设备fourier analysis 傅里叶分析fourier analyzer 傅里叶分析器fourier hologram 傅里叶变换全息图fourier inversion 傅里叶反变换fourier transform 傅里叶变换fourier transformation 傅里叶变换fpla 现场可编程序逻辑阵列fplf 现场可编程序逻辑集成电路系列fracture strength 抗断强度fracturer 破裂器fragility 脆性fragmentation 破碎frame 框架;画面frame antenna 框形天线frame attacher 框架连接器frame frequency 帧频frame period 帧周期frame scan 帧扫描frame sweep unit 帧扫描部分frame sync pulse 帧同步脉冲frame synchronization 帧同步frame synchronizer 帧同步机frames per second 帧频framing 图框配合free atmosphere 自由大气free carrier 自由载劣free electron 自由电子free electron laser 自由电子激光器free oscillations 自由振动free path 自由行程free path length 自由程free progressive wave 自由行波free radical 自由基free radical recombination 自由基复合free running multivibrator 非稳态多谐振荡器free running sweep 自激扫描free space 自由空间free space wavelength 自由空间波长free vibrations 自由振动free wave 自由波freezing test 耐寒性试验frenkel defect 弗伦克尔缺陷freon plasma 氟里昂等离子体frequency 频率frequency assignment 频率分配frequency calibration 频率校准frequency change 频率变换frequency changer 混频管frequency characteristic 频率特性frequency code 频率码frequency code signal 频率码信号frequency compensation capacitor 频率补偿电容器frequency conversion 变步frequency converter 变频器frequency converter of laser radiation 激光辐射变频器frequency demodulator 频率解调frequency deviation 频率偏移frequency discrimination 鉴频frequency discriminator 鉴频器frequency distortion 频率失真frequency diversity 频率分集frequency diversity radars 频率分集雷达frequency divider 分频器frequency division 分频frequency division date link 频率分割数据传输装置frequency division multiplex 频分多路传输frequency division multiplexing 分频多路传输frequency doubler 倍频器frequency drift 频率偏移frequency indicator 频率指示器frequency jitter 频率颤动frequency jumping 频率跃变frequency match 频率配合frequency modulated light 档光frequency modulated radar 档雷达frequency modulated transmitter 档发射机frequency modulation 频率灯frequency modulator 档器frequency multiplexing 频分多路frequency multiplier 频率倍增器frequency protection 频率保护装置frequency pulling 频率牵引frequency range 频率范围frequency record 频率记录扳frequency response 频率响应frequency response characteristic 频率响应特性frequency response curve 频率响应特性frequency scanning 频率扫描frequency selective limiter 频率选择限制器frequency shift 频移frequency shift keying 频移灯frequency stability 频率稳定度frequency stabilization 频率稳定frequency standard 频率标准frequency sweep 扫频frequency swing 频率摆动frequency synthesis 频率合成frequency synthesizer 频率合成器frequency tolerance 容许频偏frequency transformation 频率变换frequency tripler 频率三倍器frequency tuning 频率党frequencymeter 频率计fresnel region 菲涅耳区fringe 条纹fringe counter 条纹计数器from 制造厂家可编程序只读存储器front contact 前触点front end circuit 前置电路front end design 前端设计front porch 前沿front surface field 前面场front to back ratio 方向性比front to back registration 前后对准front wafer surface 晶片正面frontwall solar cell 前壁太阳能电池ft 傅里叶变换ftr 功能处理量fuel cell 燃料电池full custom ic 全定制集成电路full duplex 全双工full field exposure 整片曝光full isolation by porous oxidized silicon 多孔氧化硅完全隔离full slice integration 整片集成full slice technology 整片工艺full track recording 全磁道录音full wafer aligner 整片对准器full wafer alignment 整片对准full wafer chip 整片管芯full wafer exposure 整片曝光full wafer lithography 整片光刻full wafer mask 整片掩模full wafer memory 整片式存储器full wave rectifier 全波整流fully automated network design 全自动网络设计fully enclosed air isolation 全封闭式空气绝缘fully ionized plasma 完全电离等离子体fully reflecting surface 全反射面function generator 函数发生器function switch 函数开关functional array 功能阵列functional capability 操总力functional check 功能检验functional chip 功能芯片functional complexity 功能复杂性functional design 功能设计functional device 功能掐functional electronic block 功能电子块functional electronics 功能电子学functional integrated circuit 功能集成电路functional logic 功能逻辑functional modularity 功能模块性functional partitioning 功能划分functional power 操总力functional testing 功能测试functional throughput rate 功能处理量functional unit 功能元件functionality 操总力fundamental frequency 基频fundamental mode 竹动模式furnace 炉furnace annealing 炉内退火furnace boat 炉小舟furnace module 炉组件furnace profile 炉温度分布图furnace slice carrier 炉内晶片处理用盒fuse link 熔丝连接环fuse link technology 熔丝连接环技术fuse logic 熔丝烧断可编程序逻辑阵列fuse programmable array logic 熔丝烧断可编程序逻辑阵列fuse programmable chip 熔丝烧断可编程序芯片fuse resistor 保险丝电阻器fused junction 熔融结fused junction transistor 合金结晶体管fused quartz 熔融石英fused silica crucible 熔融石英坩埚fuser 熔化炉fusible link 熔丝连接环fusible link programmable read only memory 熔丝连接可编程序只读存储器fusing 熔融fusion point 熔点fusion reaction 热核反应fusion reactor 热核反应堆fusion temperature 聚变温度fuzziness 不清晰。
基于动网格与滑移网格混合技术的导管螺旋桨推力研究
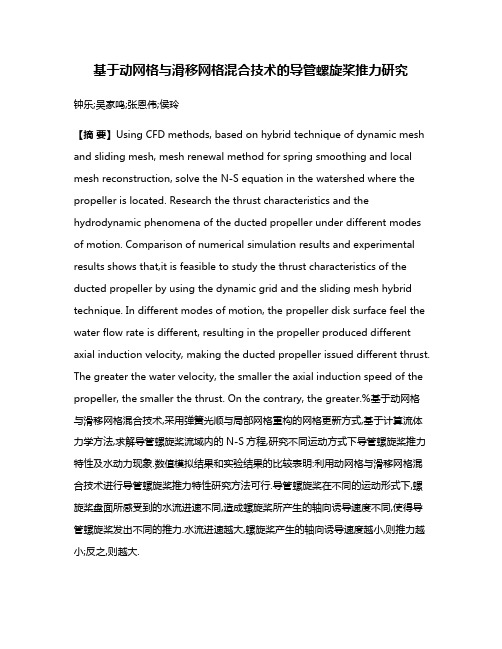
基于动网格与滑移网格混合技术的导管螺旋桨推力研究钟乐;吴家鸣;张恩伟;侯玲【摘要】Using CFD methods, based on hybrid technique of dynamic mesh and sliding mesh, mesh renewal method for spring smoothing and local mesh reconstruction, solve the N-S equation in the watershed where the propeller is located. Research the thrust characteristics and the hydrodynamic phenomena of the ducted propeller under different modes of motion. Comparison of numerical simulation results and experimental results shows that,it is feasible to study the thrust characteristics of the ducted propeller by using the dynamic grid and the sliding mesh hybrid technique. In different modes of motion, the propeller disk surface feel the water flow rate is different, resulting in the propeller produced different axial induction velocity, making the ducted propeller issued different thrust. The greater the water velocity, the smaller the axial induction speed of the propeller, the smaller the thrust. On the contrary, the greater.%基于动网格与滑移网格混合技术,采用弹簧光顺与局部网格重构的网格更新方式,基于计算流体力学方法,求解导管螺旋桨流域内的N-S方程,研究不同运动方式下导管螺旋桨推力特性及水动力现象.数值模拟结果和实验结果的比较表明:利用动网格与滑移网格混合技术进行导管螺旋桨推力特性研究方法可行.导管螺旋桨在不同的运动形式下,螺旋桨盘面所感受到的水流进速不同,造成螺旋桨所产生的轴向诱导速度不同,使得导管螺旋桨发出不同的推力.水流进速越大,螺旋桨产生的轴向诱导速度越小,则推力越小;反之,则越大.【期刊名称】《广东海洋大学学报》【年(卷),期】2017(037)004【总页数】8页(P105-112)【关键词】导管螺旋桨;CFD;动网格;滑移网格;三维运动;诱导速度【作者】钟乐;吴家鸣;张恩伟;侯玲【作者单位】华南理工大学土木与交通学院,广东广州 510640;华南理工大学土木与交通学院,广东广州 510640;华南理工大学土木与交通学院,广东广州 510640;广东海洋大学海洋工程学院,广东湛江 524088【正文语种】中文【中图分类】TV131.2导管螺旋桨是常见的螺旋桨推进器家族中的一种,在负荷较重时,其效率较普通螺旋桨高。
改进迁移算子的bbo算法及其在pid参数中的优化

裴 沛 1,李彩伟 2*,吕波特 3
(1. 北京中油瑞飞信息技术有限责任公司,北京 100029; 2. 国家工业信息安全发展研究中心,北京 100040; 3. 北京博华信智科技股份有限公司,北京 100029) ( ∗ 通信作者电子邮箱 licaiwei888@sina. com)
摘 要:针对生物地理学优化(BBO)算法寻优过程中易陷入搜索动力不足、收敛精度不高等问题,提出一种基于 改进迁移算子的生物地理学优化算法(IMO-BBO)。在 BBO 算法基础上,结合“优胜劣汰”的进化思想,将迁移距离作 为影响因素对迁移算子进行改进,并用差分策略将不适宜迁移的个体进行替换,以增加算法的局部探索能力。同时 为丰富物种的多样性,引入多种群概念。利用 IMO-BBO 算法分别对 13 个基准测试函数进行测试,与基于协方差迁移 算子和混合差分策略的 BBO(CMM-DE/BBO)算法和 BBO 算法相比,改进算法提高了对全局最优解的搜索能力,在收 敛速度和精确度上也都有显著提高;将 IMO-BBO 算法应用到 PID 参数整定中,仿真结果表明,所提算法优化后的控制 器具有更快的响应速度和更稳定的精度。
关键词:生物地理学优化算法;迁移算子;迁移距离;自适应;双种群;协作算子;PID 中图分类号:TP301; TP273. 24 文献标志码:A
Improved migration operator biogeography-based optimization algorithm and its application in PID parameter tuning
PEI Pei1,LI Caiwei2*,LYU Bote3
(1. Beijing Richfit Information Technology Company Limited, Beijing 100029, China; 2. China Industrial Control Systems Cyber Emergency Response Team, Beijing 100040, China;
光电专业英语

subsequent:随后的
aberration:象差
resolution:区分率
angstrom:埃
vibration:振动
contamination:污染
essence:本质
emulsion:感光乳剂
emanate:发出
spherical:球面的
fringe:条纹
derivation:派生物
hologram:全息图
gigahertz:千兆赫兹 electronics:电子设备
tremendous:巨大的 duct:管道 polymer:聚合物 counterpart:类似物 arcing:弧光 hazard:危害 dielectric:电介质 crosstalk:串话 susceptible:易受影响的 negligible:可以无视的
repeater:转发器
degradation:衰减
link:链路
line amplifier:线性放大器
detector:探测器
avalanche:雪崩〔二极管〕
cylindrical:圆柱的
photodiode:光电二极管
phototransistor:光电晶体管
photoconductor:光电导体
parallel:平行的
by virtue of:依靠,由于
permanent:永久的
extract:提取
carry out:施行,执行
diffract:衍射,绕射
transmitted:投射的
replica:复制品
viewpoint:观看点,视点
cylindrical:圆柱的
detail:元件
grating-like hologram:类光栅全息图
强跟踪稀疏网格滤波在水下目标跟踪中的应用

强跟踪稀疏网格滤波在水下目标跟踪中的应用王越;徐正生;于飞;陈斐楠【摘要】A Strong Tracking Sparse Grid Quadrature Filter(STSGQF)is proposed to overcome the problem that Sparse Grid QuadratureFilter(SGQF)decreases in accuracy, even diverges when the underwater target moves with power maneu-verability. The sparse grid is avaible to reduce the SGQF's computation cost, significantly, while the accuracy lowers slightly. STSGQF where the Strong Tracking Filter(STF)is introduced into SGQF not only keeps the advantages of high accuracy and shorter running time, but also improves the robustness of the algorithm. Meanwhile, STSGQF need not to calculate Jacobian matrix. Simulation results show the effectiveness of STSGQF.%针对水下目标发生强机动的情况,为解决稀疏网格求积滤波(Sparse Grid Quadrature Filter,SGQF)精度下降,甚至发散的问题,提出了强跟踪稀疏网格求积滤波(Strong Tracking Sparse Grid Quadrature Filter,STSGQF)算法.SGQF能够在保证滤波精度的情况下,大大降低运算成本.在此基础上引入强跟踪滤波(Strong Tracking Filter,STF),STSGQF不仅保留了SGQF跟踪精度高、运行时间短的优点,还提高了算法的鲁棒性,同时,也解决了STF需要求解Jacobian矩阵的问题.通过仿真实验验证了STSGQF的有效性.【期刊名称】《计算机工程与应用》【年(卷),期】2017(053)022【总页数】8页(P235-242)【关键词】水下目标跟踪;高斯-埃尔米特求积滤波;稀疏网格;强跟踪滤波【作者】王越;徐正生;于飞;陈斐楠【作者单位】哈尔滨工程大学理学院,哈尔滨 150001;哈尔滨工程大学理学院,哈尔滨 150001;哈尔滨工程大学理学院,哈尔滨 150001;哈尔滨工程大学理学院,哈尔滨 150001【正文语种】中文【中图分类】TP391.921世纪以来,随着海上资源的开发利用以及各海洋大国军事发展的需求,水下潜器在水下作业中的重要性日益凸显。
教程PPT-HWRF简介
scheme including sub-grid scale partial cloudiness; Upgrade surface physics and PBL, replace current GFDL slab model to more advanced NOAH LSM.
Expand HWRF capabilities to all global (including WP/SH/IO) basins.
<5km to represent wind maxima and resolve meso-vortices <3km to resolve clouds
3
Telescoping Nesting: Wh Telescopic Nesting: What and Why? Why? Running the model with 2 km everywhere is expensive
HWRF 2015 grid configuration
MPIPOM-TC Atlantic domain Atmospheric configuration • Horizontal grid spacing: 18, 6, 2 km • Inner nests move to follow storm • Domain location vary from run to run depending on storm location • 61 vertical levels; top at 2 hPa
A US NWS operational model to provide numerical forecast guidance of track, intensity,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Moving Grid Filter in Hybrid Local PositioningAnalytical solutions to the Bayesianfiltering problem are known only for a few special cases. In the general case,it is intractable to solve thefiltering densities exactly.Instead,the density functions and sometimes also the motion and measurement models are approximated appropri-ately to make the computation feasible.For example,with linear-Gaussian approximation,the optimalfilter reduces to the Extended Kalmanfilter.Approximating the densities with a set of points distributed accordingly leads to a particlefilter.In this paper,we show how a piece-wise constant approximation of the density functions can be used to derive a moving gridfilter.As an additional problem,the output desired from afilter is usually a point estimate,poste-rior mean,instead of the full posterior distribution.The mean error of the point estimate does not necessarily correlate at all with the quality of the estimated posterior distribution [Dun´ık et al.,2005].The practical problem of implementing and testing a positionfilter is thus two-fold.Thefirst problem is tofind the optimalfiltering solution or at least derive some of its properties like the Cram´e r-Rao lower bound[Bergman,2001].The second problem is to try to approximate the optimalfilter in some computationally feasible way.Neither of these problems has been satisfactorily solved.1.1Hybrid positioning problemIn the hybrid positioning scheme,measurements and other information from different systems are fused together.One of the challenges is to provide accurate or at least correct position information in urban areas or indoors.The behaviour of satellite-based systems such as GPS is unpredictable at best when used indoors in high-sensitivity mode.Local wireless networks, such as the cellular network,WLAN[Syrj¨a rinne,2001],or Bluetooth[Kotanen et al.,2003], offer some positioning capacity but with accuracy inferior to GPS.Another possible component of a personal navigator are the on-board sensors such as accelerometers,barometers or digital compasses.Combining the various measurement sources is difficult because of different error characteris-tics,unpredictable distortions,or systematic errors in measurements,strong nonlinearity,com-plex time-dependencies,and missing data.It is not simple to explicitly model all the cases in a general way,let alone solve the models accurately.Even with correct models,the commonly used Kalmanfilter and its nonlinear extensions can fail without warning[Ali-L¨o ytty et al.,2005]. Table1gives some examples of measurements and corresponding measurement equations.The clock biasβand driftγpresent in the pseudorange and deltarange measurements can be either estimated as two additional states,or preferably eliminated by differencing.Each measurement together with the distribution of the measurement error defines a likeli-hood function L i(x|m i),and the likelihood implied by several simultaneous measurements is found by multiplying the individual likelihoods.The measurement errorεneed not be nor-mal.Ideally,we would use an empirically determined distribution that matches the real situa-tion,as is done in the locationfingerprinting methods for mobile phone or WLAN positioning [McGuire et al.,2003,Teuber and Eissfeller,2006].From the algorithm point of view,the mea-surement likelihood can be a“black box”function,as only the function values in certain points are needed.Table1:Examples of measurement equationsranges−x1:3 ≤mpseudorangeround k s−x1:3 =m+εsector(x1:2−s1:2)∈[m−θ/2,m+θ/2]altitudes−x1:3|G(i)|where G(i)is the i th parallelepiped element andχG(i)its characteristic function,|G(i)|is the volume of the i th element,andπ(i)∈[0,1]is the probability of the state being inside the i th element.The density function is thus constantπ(i)2, 1update the probabilities of the state being inside each element.We assume the motion model is linear,that is f(x)=T x.1.Approximate the initial distribution p0|0by computing the element probabilitiesπ0|0(i),see Figure1a.Set k=1.2.Prediction step:propagate the grid basis with E k=T E k−1and compute new elementprobabilities for the prior distribution(Figure1b)fromπk|k−1(i)=n k−1j=0πk−1|k−1(j)τk|k−1(i−j)which is fast to compute as a discrete linear convolution.Hereτk|k−1(i−j)is the transition probability from j th element of(k−1)th grid to i th element of k th grid,and it depends on the motion model and the relative positions of the grids(see below).3.Correction step:use the current measurements to update element probabilities asπk|k(i)=πk|k−1(i) G k(i)L k(x k|y k)dx k.This step requires either the analytic or numerical integration of the likelihood function (Figure1c)over each element.Because the integrands are often discontinuous,the quasi Monte Carlo method seems best suited for this.After update,normalize the element probabilities so that they sum to1,to form the posterior distribution shown in Figure1d.4.Output current mean and variance estimatesµk=ni=0πk|k(i)c k(i)V k=ni=0πk|k(i)c k(i)c k(i)T−µkµT k+12 ,1d)where p wis the density function of the noise w k.Note thatΓk+1|k(i|j)now depends only on kthe difference i−j,not on i and j separately.Thus,we writeτk+1|k(i−j)=Γk+1|k(i|j),and furtherτk(i−j)= K p w,i−j(λ)dλwhere p w,i−j is shorthand for the modified process noise probability density function.Specifi-cally,if w∼N(0,Q),thenw i−j∼N j−i−E−1k+1(e k+1−T e k),E−T k+1QE−1k+1 .Then the transition probability for each value of i−j is just multinormal probability in a hyper-box and can be computed efficiently[Genz,1992].2.3Projection between gridsBecause the consecutive grid bases are related by E k+1=T E k,the elements will eventually become“sheared”along the velocity dimension.In practice,it is best to straighten the grid byprojecting the density to a new grid every once in a while.Figure2illustrates the projection process.For accurate projection,the mean density in the new element is computed by taking intersection with every element in the old grid and summing the weighted densities.Accurate projection is computationally expensive in the general multidimensional case,and is still work in progress.With a large number of small elements,the projection method does not have to be very sophisticated,as long as it is asymptotically correct.With a few large elements,on the other hand,it is important to lose as little information as possible in the projection.→Figure2:Straightening the grid(left)by projecting to a rectangular grid(right)2.4Grid designBy grid design we mean deciding what area the grid should cover and how large grid elements to use.One extreme choice is to generate massive amount of very small elements.Then the approximation will be asymptotically accurate even if theπ(i)are chosen sub-optimally,for example using just the density value in the element centre as is done in the classical point-mass filter[Bucy and Senne,1971].Another extreme is to use just a few very large elements.Then it is essential that the mean densities in the elements be computed as accurately as possible.Most of the structure of the pdf is however lost when large parts of the pdf are approximated with constant patches.Fortu-nately,it usually is not necessary to use grid spacing much denser than the expected positioning accuracy.In the implementation it is thus possible to try to strike a balance between computation load and accuracy.Optimally,the element should not be much smaller than thefinest features of the posterior distribution.There are some analytic results on how to anticipatively design1D and 2D grids for the point-mass method[ˇSimandl et al.,2002],but these are yet to be generalised for the multidimensional piecewise constant grids.3TestingThe moving grid method was implemented in M ATLAB along with a test bench for comparison between other nonlinearfilters.The simulation test bench was designed to produce dynamic test data similar to what could be expected in real-world personal positioning scenario.The main difference from the real data is that in the simulation the true track and correct measurement and motion models are available for verification of the results.The testing process consists offirst generating a true track of120points with one second intervals with a velocity-restricted random walk model, then generating the base station along the track with maximum ranges set so that one to three stations can be heard from every point on the track.A GPS constellation is then simulated with an elevation mask and shadowing profile set so that only1–4satellites are visible at a time. Finally,noisy measurements are generated for each time step from the visible satellite ranges and delta-ranges,base stations ranges and sector information,and optionally also compass and altitude measurements.Several track and measurement sets were generated with different parameters for the user mo-tion model,available measurement sources,and measurement noises.The testing scenarios range from positioning with just one or two base stations with up to500m ranging errors through a hybrid case with a couple of base stations and a two-three satellites to an over-determined satellite-only case.The test tracks were run through the moving gridfilter,and the mean and covariance of the pos-terior distribution recorded at each time step.For comparison,the data was also processed with an extended Kalmanfilter(EKF)[Ali-L¨o ytty et al.,2005],and a2-million point“bootstrap”particlefilter,which requires about hundred times more computation but is what we think the closest we can get to the optimal solution without spending months of CPU time.The particle filter solution is used as reference in the testing.The focus of these preliminary results is on gaining insight into the problem and the behaviour of the grid solver by inspecting the results of some individual runs.Quantitative results would not make much sense at this point because,firstly,the data is simulated with arbitrarily chosen parameters so we can expect arbitrary results,and secondly,there is not yet a sound and fair way of comparing differentfilters either to each other or to the true/optimal solution.Figure3shows an example run using just two base station range measurements.The ellipses represent the one-sigma approximation of the estimated posterior distributions.In the last part of the track(bottom left),the optimal posterior distribution is bi-modal,and the reference esti-mate travels somewhere in between the two.It can be seen how the EKF strayed onto the wrong branch of the posterior and gives over-optimistic variance estimates.The2D error of the gridfilter is compared to the element radius in Figure4.The error of the estimated mean from the reference mean,that is taken to be quite close to the optimal posterior mean,is indeed always smaller than the element radius.Thus,the gridfilter works as well as is to be expected.The accuracy can be improved by either using more elements,which results in more computation,or to use a tighter significant domain,in which case there is a risk of leaving too much of the posterior density outside the grid.4DiscussionPersonal positioning often is required although there are only a few measurement sources avail-able that might have large errors with unusual distributions.In these cases,it is essential that theFigure3:An example run using range measurements from two base stations.Plot a)shows the true track and the2-million point bootstrap particlefilter reference solution,plot b)presentsthe strayed EKF solution.Plot c)shows the moving grid solution with200elements,andplot d)the2-D projection of the grid estimate at t=10.maximum amount of information be extracted from every measurement.One way of achieving this is to approximate the ideal Bayesianfilter as accurately as possible.The moving gridfilter presented in this paper is a conservative approach to Bayesianfiltering.A coarse grid may not be able to present thefiner features of posterior density function accurately, but it should at least keep track of the shape of the posterior and not drop any its peaks.Pre-liminary testing of the M ATLAB implementation shows that although accurate solution would require huge number of grid elements,thefilter can be run with very coarse grids and it succeedserror / mtime / sFigure4:The2D error of the moving gridfilter mean estimate compared to the element radiusin keeping the magnitude of the error about the same as the grid element radius.This work also underlines the question of how to evaluate the accuracy of nonlinearfilters. The most common approach is to evaluate the errors between posterior mean and the true track. However,this error consists of two components:the error of the optimal posterior mean estimate from the true track,and the error of the approximated posterior mean from the optimal posterior mean.Especially in bimodal cases,it often happens that the optimal mean estimate is in between the two peaks,and thus far away from the true track.In these cases,unimodalfilters such as EKF produce posterior distributions that are clearly wrong(unimodal vs.bimodal),but their mean estimate still may be much closer to the true track than that of the optimalfilter,depending on which of the peaks they happen to follow.In this work,we compared thefiltered mean not only with the true track but also with the means of the classical EKF and that of a2-million point particlefilter.Ideally,we would like to compare the approximated posterior distribution to the true posterior distribution,but as of yet no feasible numerical method of doing so is known.This is a topic for future research. AcknowledgmentsThe authors would like to thank Robert Pich´e for his comments and corrections.This study was funded by Nokia Corporation.Both authors were supported in part by the Nokia Foundation. The particlefilter we used for reference was implemented by Duane Petrovich. References[Ali-L¨o ytty et al.,2005]Ali-L¨o ytty,S.,Sirola,N.,and Pich´e,R.(2005).Consistency of three Kalmanfilter extensions in hybrid navigation.In Proceedings of the European Navigation Conference GNSS2005,July19-22,2005,Munchen.[Bergman,2001]Bergman,N.(2001).Posterior Cram´e r-Rao bounds for sequential estimation.In Doucet,A.,de Freitas,N.,and Gordon,N.,editors,Sequential Monte Carlo Methods in Practice.Springer-Verlag,New York.[Bucy and Senne,1971]Bucy,R.S.and Senne,K.D.(1971).Digital synthesis of non-linear filters.Automatica,7(3):287–298.[Dun´ık et al.,2005]Dun´ık,J.,ˇSimandl,M.,Straka,O.,and Kr´a l,L.(2005).Performance analysis of derivative-freefilters.In Proceedings of the44th IEEE Conference on Decision and Control,and the European Control Conference2005,pages1941–1946,Seville,Spain. [Fox et al.,2003]Fox,D.,Hightower,J.,Kauz,H.,Liao,L.,and Patterson,D.J.(2003).Bayesian techniques for location estimation.In Proceedings of Workshop on Location-aware Computing,part of UBICOMP Conference,Seattle,October2003,pages16–18. [Genz,1992]Genz,A.(1992).Numerical computation of multivariate normal probabilities.Journal of Computational and Graphical Statistics,1(1):141–149.[Kotanen et al.,2003]Kotanen,A.,H¨a nnik¨a inen,M.,Lepp¨a koski,H.,and H¨a m¨a l¨a inen,T.D.(2003).Experiments on local positioning with Bluetooth.In Proceedings of the International Conference on Information Technology:Computers and Communications(ITCC’03),pages 297–303.[Kramer and Sorenson,1988]Kramer,S.C.and Sorenson,H.W.(1988).Recursive Bayesian estimation using piece-wise constant approximations.Automatica,24(6):789–801. [McGuire et al.,2003]McGuire,M.,Plataniotis,K.N.,and Venetsanopoulos,A.N.(2003).Estimating position of mobile terminals from path loss measurements with survey data.Wire-less Communications and Mobile Computing,3:51–62.[Roos et al.,2002]Roos,T.,Myllym¨a ki,P.,and Tirri,H.(2002).A statistical modeling ap-proach to location estimation.IEEE Transactions on Mobile Computing,1(1):59–69.[ˇSimandl et al.,2002]ˇSimandl,M.,Kr´a lovec,J.,and S¨o derstr¨o m,T.(2002).Anticipative grid design in point-mass approach to nonlinear state estimation.IEEE Transactions on Auto-matic Control,47(4):699–702.[Sirola and Ali-L¨o ytty,2006]Sirola,N.and Ali-L¨o ytty,S.(2006).Local positioning with par-allelepiped moving grid.In Proceedings of3rd Workshop on Positioning,Navigation and Communication2006(WPNC’06),pages179–188,Hannover.[Syrj¨a rinne,2001]Syrj¨a rinne,J.(2001).Studies of modern techniques for personal positioning.Dissertation,Tampere University of Technology,Tampere.[Teuber and Eissfeller,2006]Teuber,A.and Eissfeller,B.(2006).WLAN indoor positioning based on Euclidian distances and fuzzy logic.In Proceedings of3rd Workshop on Positioning, Navigation and Communication2006(WPNC’06),pages159–168.。