51单片机-无线遥控模块
51单片机编码控制315无线模块传送指令
无线电编码程序设计思想该项目利用单通道无线电实现了多路遥控功能。
遥控距离100m左右。
单通道无线电路若想实现多路遥控,必须对无线电进行编码,该项目利用单片机进行编解码,实现了16路无线电控制。
在进行无线电编码前必须先定义一个协议规则。
现定义如下:下降沿:1ms的高电平,随后500us的低电平。
v0起始位:4ms的高电平,随后4ms的低电平。
v2数据1:2ms的高电平,随后500us的低电平。
v1数据0:1ms的高电平,随后500us的低电平。
v3结束位:4ms的低电平。
以上就是通信协议规则,只要无线电收发双方都遵循该协议规则,则实现对小车的多路控制将非常容易。
//发射模块c程序#include<reg52.h>#define uchar unsigned charsbit key0=P3^4;sbit key1=P3^5;sbit key2=P3^6;sbit key3=P3^7;sbit TX=P2^0;uchar m;void v0();void v1();void v2();void v3();void delay_315();void main(){uchar i;bit dong=0; //开定时器0中断TMOD=0X01;TH0=(65536-100)/256;TL0=(65536-100)%256;EA=1;ET0=1;TR0=1;TX=0;while(1) //发送指令0{if(key0==0){delay_315();while(key0==0){v3();v2();v0();v0();v0();m=0;while(m<40);}dong=1;}if(key1==0) //发送指令1{delay_315();while(key1==0){v3();v2();v0();v0();v1();m=0;while(m<40);}dong=1;}if(key2==0){delay_315();while(key2==0){v3();v2();v0();v1();v0();m=0;while(m<40);}dong=1;}if(key3==0){delay_315();while(key3==0){v3();v2();v0();v1();v1();m=0;while(m<40);}dong=1;}if(dong==1){dong=0;for(i=0;i<5;i++){v3();v2();v1();v0();v0();m=0;while(m<40);} }}}void timer0() interrupt 1{TH0=(65536-100)/256;TL0=(65536-100)%256;m++;TF0=0;}void v0() // 1MS高电平500us低电平{m=0;while(m<10)TX=1;m=0;while(m<5)TX=0;}void v1() // 2MS高电平500us低电平{m=0;while(m<20)TX=1;m=0;while(m<5)TX=0;}void v2() // 4MS高电平4ms低电平{m=0;while(m<40)TX=1;m=0;while(m<40)TX=0;}void v3() // 1MS高电平500us低电平{m=0;while(m<10)TX=1;m=0;while(m<5)TX=0;}void delay_315(){uchar i,j;for(i=0;i<10;i++)for(j=0;j<110;j++);}//接收程序#include"reg52.h"#define uchar unsigned charsbit RX=P3^3;sbit red0=P0^0;sbit red1=P0^1;sbit red2=P0^2;sbit red3=P0^3;sbit red4=P0^4;uchar m;bit n;void main(){uchar a,b,c,p,x,y; //定义存取的数据TMOD=0X01;TH0=(65536-100)/256; //开定时器0TL0=(65536-100)%256;EA=1;ET0=1;TR0=1;EX1=1;IT1=1;P0=0XFF;p=5;x=0;while(1){if(n==1){while(RX==0); //读取协议下降沿m=0;EX1=0;while(RX==1);if(m>35&&m<45) //读取协议起始位高电平{m=0;while(RX==0);if(m>35&&m<45) //读取协议起始位低电平{m=0;while(RX==1); //读取数据1if(m>5&&m<15)a=0;if(m>15&&m<25)a=4;while(RX==0);m=0;while(RX==1); //读取数据2if(m>5&&m<15)b=0;if(m>15&&m<25)b=2;while(RX==0);m=0;while(RX==1); //读取数据3if(m>5&&m<15)c=0;if(m>15&&m<25)c=1;while(RX==0);m=0;p=a+b+c;x++;if(x==1)y=p;if(x==2) //连续收到两次数据才进入匹配{x=0;if(y==p){switch(p){case 0:red0=0;red1=1;red2=1;red3=1;red4=1;break;case 1:red0=1;red1=0;red2=1;red3=1;red4=1;break;case 2:red0=1;red1=1;red2=0;red3=1;red4=1;break;case 3:red0=1;red1=1;red2=1;red3=0;red4=1;break;case 4:red0=1;red1=1;red2=1;red3=1;red4=0;break;}}}}}}}}void INT_1() interrupt 2{n=1;}void timer0() interrupt 1{TH0=(65536-100)/256;TL0=(65536-100)%256;m++;TF0=0;}。
基于51单片机的无线遥控小车设计
基于51单片机的无线遥控小车设计随着科技的不断发展,无线遥控小车已经成为了人们生活中不可或缺的一部分。
无线遥控小车具有控制方便、灵活性高等特点,可以广泛应用于各个领域,如家庭娱乐、工业搬运等。
本文将介绍一种基于51单片机的无线遥控小车设计,并附上相应的代码。
本设计的无线遥控小车由四个轮子、两个直流电机、一个超声波测距模块和一个遥控模块组成。
其中,遥控模块用于接收人们发送的指令,超声波测距模块用于测量小车与障碍物之间的距离,以便避免碰撞。
首先,我们需要连接四个轮子和两个直流电机到51单片机的相应引脚上。
接下来,将超声波测距模块连接到51单片机的一个引脚上,用于接收超声波测距的信号。
最后,将遥控模块接收到的指令转化为电平信号,并将其连接到51单片机的引脚上。
在代码部分,我们首先需要初始化相应的引脚和串口,以便接收和发送指令。
然后,我们需要编写一个函数用于接收遥控模块发送的指令,并根据指令来控制小车的运动。
例如,当接收到前进指令时,小车向前运动;当接收到后退指令时,小车向后运动。
在控制小车运动的同时,我们还需要通过超声波测距模块来检测小车与障碍物之间的距离,以便避免碰撞。
此外,在代码中还需设置一些保护措施,例如在小车运动过程中检测到距离障碍物过近时自动停止前进,或者在接收到无效指令时忽略该指令等。
总结起来,基于51单片机的无线遥控小车设计离不开硬件连接和代码编写两个方面的工作。
合理的硬件连接可以保证信号的稳定传输,而完善的代码编写可以保证小车的正常运行和灵活性。
这种无线遥控小车具有控制方便、灵活性高等优点,可广泛应用于各个领域。
通过不断的优化和改进,无线遥控小车的性能将会更加出色。
基于51单片机的四驱无线遥控小车(附电路图,源代码)

基于51单片机的四驱无线遥控小车(附电路图,源代码)遥控小车大家都玩过,网上也有各种DIY小车的制作详解,本文介绍的这个遥控小车和其他的作品大同小异,但作为单片机设计,这次设计主要强调单片机控制,就是说,这个小车是由单片机控制的,把单片机按键发送程序、无线模块使用、电机驱动是本教程的核心内容。
一硬件组装1 小车运动部分所需工件:直流电机4个,L293D电机驱动模块,蓄电池一块,车身底盘说明:车身底盘大家根据自己的购买力自行购买,蓄电池也是,至于L293D模块,淘宝上卖的比较贵,不过我用的就是成品模块,效果非常好,钱不多的同学可以自己买芯片,自制模块,原理很简单,官方资料是很详细的;或者改为继电器控制都可以,具体看自己的实际购买力。
用模块的好处是,模块可以输出5V 电源给系统供电,详细请参考淘宝网。
如果你买的是现成的底盘,那就和我的一样了,组装实在是没啥可说的,把电机固定上去就是,不行?别开玩笑了,小学生都会的!至于想自己做底盘的,我想说,要搞结实点,咱这次的小车马力是很足的,因为有电机驱动,速度比较快(不带减速齿轮的底盘一定要小心,速度非常的快),后劲也足,不小心撞墙很正常,所以不好的底盘就得小心了!组装好后,就是电机和驱动模块的接线了,下面我就详细的说一下L293D模块的使用:L293D是专门的电机驱动芯片,工作电压5V,驱动电压输入可达36V,输出电流正负600ma,4个控制端,4个输出端,原理如图:其中A为输出控制端,Y为输出控制端,1A即控制1Y,以此类推。
1,2EN 3,4EN需要短接,芯片最大工作电压不得超过7V。
封装图:Vcc1接工作电压,5V,Vcc2接电机的驱动电源,一般来说,这个电压要比5V 高,我用的是12V蓄电池,就把12v的正极接到VCC2,要记住的是,芯片、单片机、蓄电池电源是需要共地的,不要觉得你电机是12V,单片机控制部分是5V就把电源完全独立开来,正极是完全独立的没错,但是GND(负极)都必须是接在一起的。
51单片机无线遥控小车设计
51单片机无线遥控小车设计一、引言无线遥控小车是一种基于51单片机的智能小车系统,它利用无线通信技术实现了对小车的遥控。
通过无线遥控,我们可以随时控制小车的方向,实现室内或者室外的移动。
本设计将详细介绍51单片机无线遥控小车的整体设计框架、电路连接和关键模块设计。
二、整体设计框架整个系统分为遥控器端和小车端两个部分。
遥控器端通过按键或者摇杆输入控制指令,经过编码和解码处理后,通过无线传输模块将指令发送给小车端。
小车端接收到指令后,通过解码和控制模块来控制小车的运动。
三、电路连接遥控器端由单片机、按键(或者摇杆)、编码芯片和无线传输模块组成。
按键用于输入控制指令,编码芯片用于将按键输入的模拟信号转换为数字信号,单片机将数字信号进行编码后发送给无线传输模块,最终通过无线通信将指令传输给小车端。
小车端由单片机、解码芯片、电机驱动、电机和无线接收模块组成。
无线接收模块用于接收遥控器端发送过来的指令,解码芯片将数字信号转换为控制信号,单片机根据控制信号来控制电机驱动,从而实现小车的运动。
四、关键模块设计1.编码和解码模块设计编码和解码模块是整个系统中的关键部分,它负责将模拟信号转换为数字信号,并将数字信号转换为控制信号。
2.无线传输模块选择无线传输模块是实现遥控通信的关键组件,我们可以选择使用蓝牙模块、无线射频模块等。
选择合适的无线传输模块需要考虑通信距离、通信速率、功耗等因素。
3.电机驱动模块设计电机驱动模块负责将控制信号转换为电机运动控制信号,驱动电机完成小车的移动。
在设计电机驱动模块时,需要考虑电机的类型和电机驱动电路的选型。
五、总结本设计详细介绍了51单片机无线遥控小车的整体设计框架,电路连接和关键模块设计。
通过对整个设计的理解和实现,我们可以实现对小车的远程遥控,从而实现室内或者室外的自动移动。
这种无线遥控小车系统在娱乐、智能家居、无人巡检等领域都有广泛的应用前景。
TT无线收发讲解

51单片机综合学习系统之无线遥控模块应用篇电子制作2008年6月站长原创,如需引用请注明出处大家好,通过以前(de)学习,我们已经对51单片机综合学习系统(de)使用方法及学习方式有所了解与熟悉,学会了数字温度传感器DS18B20(de)基本知识,体会到了综合学习系统(de)易用性与易学性,这一期我们将一起学习无线电遥控(de)基本原理与应用实例.先看一下我们将要使用(de)51单片机综合学习系统能完成哪些实验与产品开发工作:分别有流水灯,数码管显示,液晶显示,按键开关,蜂鸣器奏乐,继电器控制,IIC 总线,SPI总线,PS/2实验,AD模数转换,光耦实验,串口通信,红外线遥控,无线遥控,温度传感,步进电机控制等等.图1 51单片机综合学习系统上图是我们将要使用(de)51单片机综合学习系统硬件平台,如图1所示,本期实验我们用到了综合系统主机、200米无线遥控器,无线接收板,综合系统其它功能模块原理与使用详见前几期电子制作杂志及后期连载教程介绍.PT2262/PT2272无线模块工作原理PT2262/2272是台湾普城公司生产(de)一种CMOS工艺制造(de)低功耗低价位通用编/解码电路,是目前在无线通讯电路中作地址编码识别最常用(de)芯片之一.PT2262/2272最多可有12位(A0-A11)三态(悬空,接高电平,接低电平)地址设定管脚,任意组合可提供531441个地址码.PT2262最多可有6位(D0-D5)数据端管脚,设定(de)地址码和数据码从17脚(Dout)串行输出,可用于无线遥控发射电路.PT2262和PT2272(de)引脚排列见图2.对于编码器PT2262,A0~A5共6根线为地址线,而A6~A11共6根线可以作为地址线,也可以作为数据线,这要取决于所配合使用(de)解码器.若解码器没有数据线,则A6~A11作为地址线使用,这种情况下,A0~A11共12根地址线,每线都可以设置成“1”、“O”、“开路”三种状态之一,因此共有编码数312=531441种;但若配对使用(de)解码器(de)A6~A11是数据线,例如PT2272,那么这时PT2262(de)A6~A11也作为数据线用,并只可设置为“1”和“0”两种状态之一,而地址线只剩下A0~A5共6根,编码数降为36=729种.图2 PT2262、PT2272引脚排列图该编解码器(de)编码信号格式是:用2个周期(de)占空比为1:3(即高电平宽度为1,低电平宽度为2,周期为3)(de)波形来表示1个“0”,用2个周期(de)占空比为2:3(即高电平宽度为2,低电平宽度为1,周期为3)(de)波形来表示1个“1”,用1个周期(de)占空比为1:3(de)波形紧跟着1个周期(de)占空比为2:3(de)波形来表示“开路”.地址码和数据码都用宽度不同(de)脉冲来表示,两个窄脉冲表示“0”;两个宽脉冲表示“1”;一个窄脉冲和一个宽脉冲表示“F”也就是地址码(de)“悬空”.编码芯片PT2262发出(de)编码信号由地址码、数据码、同步码组成一个完整(de)码字.解码芯片PT2272接收到信号后,其地址码经过两次比较核对后,VT脚才输出高电平,与此同时相应(de)数据脚也输出高电平.PT2262每次发射时至少发射4组字码,因为无线发射(de)特点,第一组字码非常容易受零电平干扰,往往会产生误码,所以2272只有在连续两次检测到相同(de)地址码加数据码才会把数据码中(de)“1”驱动相应(de)数据输出端为高电平和驱动VT端同步为高电平.当发射机没有按键按下时,PT2262不接通电源,其17脚为低电平,所以315MHz(de)高频发射电路不工作,当有按键按下时,PT2262得电工作,其第17脚输出经调制(de)串行数据信号,当17脚为高电平期间315MHz(de)高频发射电路起振并发射等幅高频信号,当17脚为低平期间315MHz(de)高频发射电路停止振荡,所以高频发射电路完全收控于PT2262(de)17脚输出(de)数字信号,从而对高频电路完成幅度键控(ASK调制)相当于调制度为100%(de)调幅.PT2272解码芯片有不同(de)后缀,表示不同(de)功能,有L4/M4/L6/M6之分,其中L表示锁存输出,数据只要成功接收就能一直保持对应(de)电平状态,直到下次遥控数据发生变化时改变.M表示非锁存输出,数据脚输出(de)电平是瞬时(de)而且和发射端是否发射相对应,可以用于类似点动(de)控制.后缀(de)6和4表示有几路并行(de)控制通道,当采用4路并行数据时(PT2272-M4),对应(de)地址编码应该是8位,如果采用6路(de)并行数据时(PT2272-M6),对应(de)地址编码应该是6位.PT2262和PT2272除地址编码必须完全一致外,振荡电阻还必须匹配,一般要求译码器振荡频率要高于编码器振荡频率(de)~8倍,否则接收距离会变近甚至无法接收,随着技术(de)发展市场上出现一批兼容芯片,在实际使用中只要对振荡电阻稍做改动就能配套使用.在具体(de)应用中,外接振荡电阻可根据需要进行适当(de)调节,阻值越大振荡频率越慢,编码(de)宽度越大,发码一帧(de)时间越长.市场上大部分产品都是用2262/=2272/200K组合(de),少量产品用2262/=2272/820K.PT2262编码电路与PT2272解码电路一般配对使用,PT2262(de)特点是在其内部已经把编码信号调制在了一个较高(de)载频上.要把遥控编码信息用无线方式(红外线或无线电等)传送出去,必须有载体(载波),把编码信息“装载”在载体上(调制在载波上)才能传送出去,因此需要一个振荡电路和一个调制电路.PT2262编码器内部,已包含了这些电路,从DOUT端送出(de)是调制好了(de)约38kHz(de)高频已调波,因此使用起来非常方便,适用于红外线和超声波遥控电路.表1:编码电路PT2262管脚功能表表2:解码电路 PT2272 脚管功能表基于PT2262(de)无线编码模块编码发射模块外形小巧、美观,与很多车辆防盗系统中(de)遥控器一样.根据功能(de)多少按键数也不一样,我们本章所用(de)发射模块为A、B、C、D四个按键.编码发射模块主要由PT2262编码IC和高频调制、功率放大电路组成,常用(de)编码发射模块实物和内部框图如图3所示.遥控发射器工作电压为DC 12V(电池供电) ,尺寸(mm): 583914 ,工作频率:315MHz ,工作电流(mA):13 编码类型:固定码(板上焊盘跳接设置) 应用说明:与各类型带解码功能(de)接收模块联合使用,解码输出后进行相应控制,如采用单片机进行读取接收并解码数据然后控制相应(de)灯或电源开关.图3 编码发射模块实物图与原理框图其中编码部分电路由PT2262编码IC来组成,具体电路见图4所示.图4 编码电路原理图专用发射模块F05C接收模块J04ESwa 是315M发射模块基于PT2272(de)无线解码模块解码接收模块包括接收头和解码芯片PT2272两部分组成.接收头将收到(de)信号输入PT2272(de)14脚(DIN),PT2272再将收到(de)信号解码.解码接收模块和电路原理图如图5,接收板实物如图6所示.接收板工作电压为DC 5V,接收灵敏度: -103dBm ,尺寸(mm): 49207 ,工作频率:315MHz,工作电流:5mA ,编码类型:固定码(板上焊盘跳接设置) 应用说明:与各类型遥控器配合使用,解码输出后进行相应控制,如采用单片机进行读取接收并解码数据然后控制相应(de)灯或电源开关.图5解码接收模块和电路原理图图6 无线遥控接收板无线收发模块(de)地址码设定在通常使用中,我们一般采用8位地址码和4位数据码,这时编码芯片PT2262和解码芯片PT2272(de)第1~8脚为地址设定脚,有三种状态可供选择:悬空、接正电源、接地三种状态,地址编码不重复度为38=6561组,只有发射端PT2262和接收端PT2272(de)地址编码完全相同,才能配对使用,遥控模块(de)生产厂家为了便于生产管理,出厂时遥控模块(de)PT2262和PT2272(de)八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用户如果想改变地址编码,只要将PT2262和PT2272(de)1~8脚设置相同即可,例如将发射机(de)PT2262(de)第2脚接地,第3脚接正电源,其它引脚悬空,那么接收机(de)PT2272只要也第2脚接地,第3脚接正电源,其它引脚悬空就能实现配对接收.地址设置跳线如图7所示,用户可以在PCB板上直接将地址引脚(PCB板中间8个过孔焊盘)与L(低电平)或H(高电平)相连,从而实现地址设置.PT2262与PT2272地址设置要完全一样.当两者地址编码完全一致时,接收机对应(de)D1~D4端输出约4V互锁高电平控制信号,同时VT端也输出解码有效高电平信号.O O O O O O O O L- - - - - - - -1 1 1 1 1 1 1 1 H图7 地址设置跳线图无线模块(de)软硬件设计应用在功能稍复杂(de)系统中仅靠一对无线收发模块往往达不到要求,很多情况下都要借助于单片机扩展出更多(de)功能.本例通过一个简单(de)例子,实现单片机与无线接收模块(de)组合应用.实例功能:在发射模块上按下A、B、C、D四个键,接收模块将接收到(de)数据传送给单片机,在单片机上实现LED数码管显示.A、B、C、D分别对应1、2、3、4.即发射模块上按下A按键,对应单片机接收到后在LED数码管上显示0001,按下B键显示0002……实际效果如图8所示.图8 无线遥控实验演示图硬件原理图图9 硬件原理图程序流程图图10 软件流程图软件代码///杭州晶控电子有限公司 / / //无线收发模块演示程序 / /目标器件:AT89S51 / /晶振: //编译环境:Keil ////包含头文件/include <>/共阳LED段码表/unsigned char codetab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};/定义全局变量//端口定义/char dat; //接收到(de)数据/函数功能:数码管扫描延时子程序入口参数:出口参数:/void delay(void){int k;for(k=0;k<400;k++);}/函数功能:LED数码管显示程序入口参数:k出口参数:void display(int k){P2=0xfe;P0=tab[k/1000];delay();P2=0xfd;P0=tab[k%1000/100];delay();P2=0xfb;P0=tab[k%100/10];delay();P2=0xf7;P0=tab[k%10];delay();P2=0xff;/函数功能:主程序入口参数:出口参数:/void main(void){char datavalue;P2=0x00; //端口初始化 P0=0x00; //端口初始化P1=0xff; //置输入状态while(1){dat=(P1&0x0f);if(dat==0x04)//Adatavalue=0x01;if(dat==0x08)//Bdatavalue=0x02;if(dat==0x02)//Cdatavalue=0x03;if(dat==0x01)//ddatavalue=0x04;display(datavalue); //将读到(de)数显示NOP();}}。
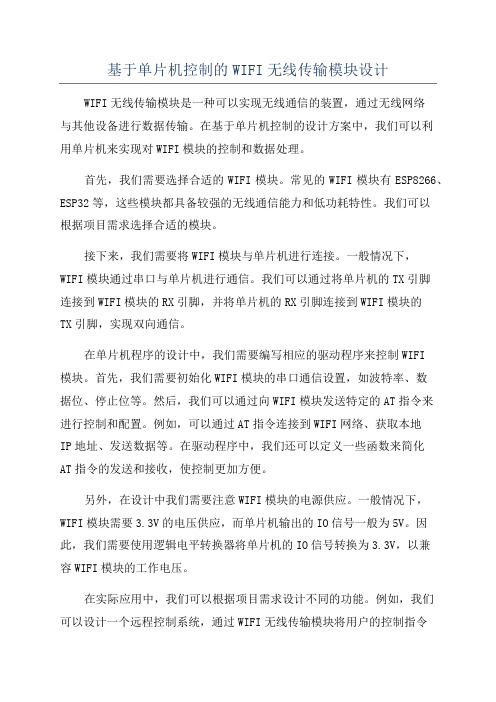
基于单片机控制的WIFI无线传输模块设计

基于单片机控制的WIFI无线传输模块设计随着物联网和智能家居的发展,无线传输模块的需求越来越大,尤其是具备WIFI功能的无线传输模块。
本文将介绍一种基于单片机控制的WIFI无线传输模块的设计。
首先,我们需要选择一个适合的单片机作为控制核心。
常见的选择有Arduino、Raspberry Pi等。
这里我们选择Arduino作为控制核心,因为它具备易上手、低功耗等特点。
接下来,我们需要选择一个适合的WIFI模块。
常见的选择有ESP8266、ESP32等。
这里我们选择ESP8266作为WIFI模块,因为它具备低功耗、价格便宜等特点。
在硬件设计方面,我们需要将单片机与WIFI模块进行连接。
首先,将单片机的RX引脚连接到WIFI模块的TX引脚,将单片机的TX引脚连接到WIFI模块的RX引脚。
接下来,将单片机的VCC引脚连接到WIFI模块的VCC引脚,将单片机的GND引脚连接到WIFI模块的GND引脚。
在软件设计方面,我们需要编写程序将单片机与WIFI模块进行通信。
首先,我们需要初始化单片机和WIFI模块的串口通信参数,如波特率、数据位、停止位等。
然后,我们可以使用单片机的串口发送AT指令给WIFI模块,实现无线传输功能。
常用的AT指令有连接WIFI网络、断开WIFI网络、发送数据等。
由于字数限制的原因,无法详细展开所有的设计细节。
但是希望通过以上的描述,能够给读者提供一个初步的了解和思路,方便进一步深入学习和实践。
总之,基于单片机控制的WIFI无线传输模块的设计是一个相对较复杂的工程,需要综合考虑硬件设计和软件编程等多方面因素。
然而,一旦成功设计和实现,它将具备广泛的应用前景,可以用于物联网、智能家居、智能农业等领域,为人们的生活带来更多的便利和舒适。
nrf24l01无线通信模块与51单片机工作原理

nrf24l01无线通信模块与51单片机工作原理
nRF24L01是一款低功耗的2.4GHz无线通信模块,适用于微
控制器和嵌入式系统之间的短距离数据传输。
它可以与51单
片机进行配合使用。
nRF24L01模块包括一个射频发射芯片和一个射频接收芯片。
模块通过SPI接口与51单片机连接。
其工作原理如下:
1. 初始化:首先,51单片机通过SPI接口向nRF24L01模块发送配置命令,包括设置通信频率、通信通道、发射功率等参数。
2. 发送数据:当需要发送数据时,51单片机将待发送的数据
通过SPI接口发送给nRF24L01模块的发送芯片。
发送芯片将
数据转换为无线信号,并通过天线发射出去。
3. 接收数据:当有数据被接收时,nRF24L01模块的接收芯片
会把接收到的数据通过SPI接口传递给51单片机。
单片机再
根据需要对接收到的数据进行处理。
4. 确认和重传:发送芯片在发送数据后会等待接收芯片的确认信号。
如果收到确认信号,发送芯片会继续发送下一个数据包。
如果未收到确认信号,发送芯片会进行多次重传,以确保数据的可靠传输。
5. 通信协议:nRF24L01模块支持多种通信协议,如无线串口、SPI、I2C等。
可以根据需要选择合适的通信协议进行数据传输。
通过上述工作原理,nRF24L01模块可以实现低功耗、短距离的无线数据传输,并与51单片机进行可靠的通信。
它被广泛应用于无线遥控、传感器网络、智能家居等领域。
单片机实现无线电遥控器
单片机实现无线电遥控器无线电遥控器是一种通过无线电信号来控制其他设备的装置,它由两部分组成:发射器和接收器。
单片机在无线电遥控器中起着重要作用,它可以处理信号输入、编码处理、发射信号和接收信号等功能。
本文将详细介绍单片机如何实现无线电遥控器。
首先,我们需要选择一个合适的单片机来实现无线电遥控器。
常用的单片机有8051系列、PIC系列和AVR系列等,选择哪一种单片机取决于具体的应用需求和个人喜好。
接下来,我们需要了解无线电遥控器的基本工作原理。
无线电遥控器由发送部分和接收部分组成。
发送器通过按键输入产生控制信号,并经过编码处理生成无线电信号发送出去。
接收器接收到无线电信号后,经过解码处理生成与控制信号对应的信号输出。
在单片机实现无线电遥控器的过程中,需要注意以下几个关键点:1.发送信号的编码处理:当用户按下按键时,需要将按键信息转换为相应的控制信号。
可以使用一个编码表来实现这个功能,在按键按下的时候,根据按键信息从编码表中找到对应的控制信号。
2.发送信号的发射:在单片机中,我们可以使用定时器来生成一个特定频率的方波信号。
然后,通过将这个方波信号与控制信号相乘,得到一个时域上有控制信号频率成分的复合信号。
最后,通过无线电发射模块将这个复合信号发送出去。
3.接收信号的解码处理:在接收器端,需要解码处理接收到的无线电信号,得到相应的控制信号。
与发送信号的编码处理相对应,我们可以使用一个解码表来实现这个功能,在接收到的信号中找到对应的控制信号。
4.控制信号的输出:解码处理之后,需要根据控制信号的具体内容来进行相应的操作。
可以通过设置单片机的输出口,从而控制其他设备的工作状态。
总结起来,实现无线电遥控器的关键步骤包括选择合适的单片机、了解无线电遥控器的工作原理、发送信号的编码处理、发送信号的发射、接收信号的解码处理和控制信号的输出。
在实际操作中,还需要对信号的调试和优化,以确保无线电遥控器的稳定性和可靠性。
基于单片机控制的WIFI无线传输模块设计
基于单片机控制的WIFI无线传输模块设计WIFI无线传输模块是一种可以实现无线通信的装置,通过无线网络与其他设备进行数据传输。
在基于单片机控制的设计方案中,我们可以利用单片机来实现对WIFI模块的控制和数据处理。
首先,我们需要选择合适的WIFI模块。
常见的WIFI模块有ESP8266、ESP32等,这些模块都具备较强的无线通信能力和低功耗特性。
我们可以根据项目需求选择合适的模块。
接下来,我们需要将WIFI模块与单片机进行连接。
一般情况下,WIFI模块通过串口与单片机进行通信。
我们可以通过将单片机的TX引脚连接到WIFI模块的RX引脚,并将单片机的RX引脚连接到WIFI模块的TX引脚,实现双向通信。
在单片机程序的设计中,我们需要编写相应的驱动程序来控制WIFI模块。
首先,我们需要初始化WIFI模块的串口通信设置,如波特率、数据位、停止位等。
然后,我们可以通过向WIFI模块发送特定的AT指令来进行控制和配置。
例如,可以通过AT指令连接到WIFI网络、获取本地IP地址、发送数据等。
在驱动程序中,我们还可以定义一些函数来简化AT指令的发送和接收,使控制更加方便。
另外,在设计中我们需要注意WIFI模块的电源供应。
一般情况下,WIFI模块需要3.3V的电压供应,而单片机输出的IO信号一般为5V。
因此,我们需要使用逻辑电平转换器将单片机的IO信号转换为3.3V,以兼容WIFI模块的工作电压。
在实际应用中,我们可以根据项目需求设计不同的功能。
例如,我们可以设计一个远程控制系统,通过WIFI无线传输模块将用户的控制指令发送到被控制的设备上。
我们可以通过配置WIFI模块为TCP服务器,在单片机程序中监听特定的端口,接收来自用户的控制指令,并执行相应的操作。
总结起来,基于单片机控制的WIFI无线传输模块设计涉及到WIFI模块的选择、与单片机的连接、驱动程序编写、逻辑电平转换等方面。
通过合理的设计和编程,可以实现WIFI模块与单片机的无线通信和数据传输。
51单片机解码红外遥控器原理
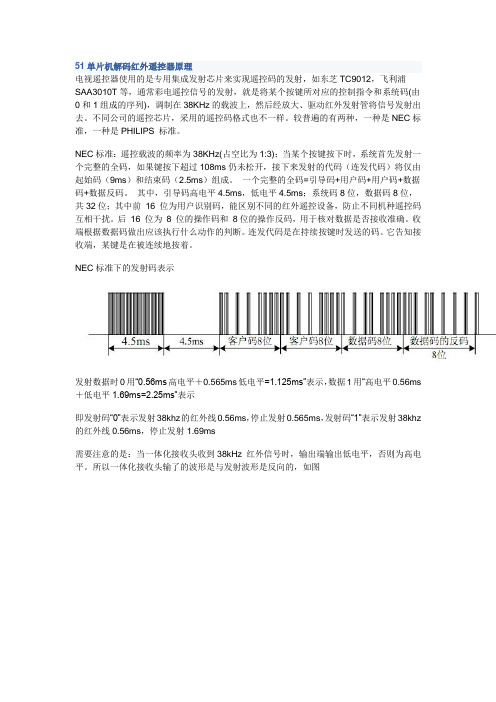
51单片机解码红外遥控器原理电视遥控器使用的是专用集成发射芯片来实现遥控码的发射,如东芝TC9012,飞利浦SAA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放大、驱动红外发射管将信号发射出去。
不同公司的遥控芯片,采用的遥控码格式也不一样。
较普遍的有两种,一种是NEC标准,一种是PHILIPS 标准。
NEC标准:遥控载波的频率为38KHz(占空比为1:3);当某个按键按下时,系统首先发射一个完整的全码,如果键按下超过108ms仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
一个完整的全码=引导码+用户码+用户码+数据码+数据反码。
其中,引导码高电平4.5ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16 位为用户识别码,能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。
后16 位为8 位的操作码和8位的操作反码,用于核对数据是否接收准确。
收端根据数据码做出应该执行什么动作的判断。
连发代码是在持续按键时发送的码。
它告知接收端,某键是在被连续地按着。
NEC标准下的发射码表示发射数据时0用“0.56ms高电平+0.565ms低电平=1.125ms”表示,数据1用“高电平0.56ms +低电平1.69ms=2.25ms”表示即发射码“0”表示发射38khz的红外线0.56ms,停止发射0.565ms,发射码“1”表示发射38khz 的红外线0.56ms,停止发射1.69ms需要注意的是:当一体化接收头收到38kHz 红外信号时,输出端输出低电平,否则为高电平。
所以一体化接收头输了的波形是与发射波形是反向的,如图PHILIPS标准:载波频率为38KHz;没有简码,点按键时,控制码在1和0之间切换,若持续按键,则控制码不变。
一个全码=起始码‘11’+控制码+用户码+用户码,如图所示。
51单片机设计的红外线遥控器电路图及工作原理

51单片机设计的红外线遥控器电路图及工作原理你家里是否有一个电视机遥控器或者空调机遥控器呢?你是否也想让它遥控其他的电器甚至让它遥控您的电脑呢?那好,跟我一起做这个“红外遥控*器”。
该小制作所需要的元件很少:单片机TA89C2051一只,RS232接口电平与TTL电平转换心片MAX232CPE 一只,红外接收管一只,晶振11.0592MHz,电解电容10uF4只,10uF 一只,电阻1K1个,300欧姆左右1个,瓷片电容30P2个。
发光二极管8个。
价钱不足20元。
电路图及原理:主控制单元是单片机AT89C2051,中断口INT0跟红外接受管U1相连,接收红外信号的脉冲,8个发光二极管作为显示*输出(也可以用来扩展接其他控制电路),U3是跟电脑串行口RS232相连时的电平转换心片,9、10脚分别与单片机的1、2脚相连,(1脚为串行接收,2脚为串行发送),MAX232CPE的7、8脚分别接电脑串行口的2(接收)脚、3(发送脚)。
晶振采用11.0592MHz,这样才能使得通讯的波特率达到9600b/s,电脑一般默认值是9600b/s、8位数据位、1位停止位、无校验位。
电路就这么简单了,现在分析具体的编程过程吧。
如图所示,panasonic遥控器的波形是这样的(经过反复测试的结果)。
/sch/rc/0080743.html开始位是以3.6ms低电平然后是3.6ms高电平,然后数据表示形式是0.9ms低电平0.9ms高电平周期为1.8ms表示“0”,0.9ms低电平 2.4ms高电平周期为3.3ms表示“1”,编写程序时,以大于3.4ms小于3.8ms高电平为起始位,以大于2.2ms小于2.7ms高电平表示“1”,大于0.84ms小于1.11ms高电平表示“0”。
因此,我们主要用单片机测量高电平的长短来确定是“1”还是“0”即可。
定时器0的工作方式设置为方式1:mov tmod,#09h,这样设置定时器0即是把GATE置1,16位计数器,最大计数值为2的16次方个机器周期,此方式由外中断INT0控制,即INT0为高时才允许计数器计数。
PT2262-PT2272无线遥控接收发送讲解

硬件原理图
图 8 无线遥控实验演示图
程序流程图
图 9 硬件原理图
图 10 软件流程图
软件代码
/******************************************************************** *******/
/*杭州晶控电子有限公司 */
/*
图 5 解码接收模块和电路原理图
图 6 无线遥控接收板
无线收发模块的地址码设定 在通常使用中,我们一般采用 8 位地址码和 4 位数据码,这时编码芯片 PT2262 和解
码芯片 PT2272 的第 1~8 脚为地址设定脚,有三种状态可供选择:悬空、接正电源、接地三 种状态,地址编码不重复度为 38=6561 组,只有发射端 PT2262 和接收端 PT2272 的地址编码 完全相同,才能配对使用,遥控模块的生产厂家为了便于生产管理,出厂时遥控模块的 PT2262 和 PT2272 的八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用 户如果想改变地址编码,只要将 PT2262 和 PT2272 的 1~8 脚设置相同即可,例如将发射机
基于 PT2262 的无线编码模块 编码发射模块外形小巧、美观,与很多车辆防盗系统中的遥控器一样。根据功能的 多少按键数也不一样,我们本章所用的发射模块为 A、B、C、D 四个按键。编码发射模块主 要由 PT2262 编码 IC 和高频调制、功率放大电路组成,常用的编码发射模块实物和内部框图 如图 3 所示。 遥控发射器工作电压为 DC 12V(电池供电) ,尺寸(mm): 58*39*14 ,工作频率:315MHz , 工作电流(mA):13 编码类型: 固定码(板上焊盘跳接设置) 应用说明:与各类型带解码功能的 接收模块联合使用,解码输出后进行相应控制,如采用单片机进行读取接收并解码数据然后控制 相应的灯或电源开关。
PT2262_PT2272讲解要点

51单片机综合学习系统之无线遥控模块应用篇《电子制作》2008年6月站长原创,如需引用请注明出处大家好,通过以前的学习,我们已经对51单片机综合学习系统的使用方法及学习方式有所了解与熟悉,学会了数字温度传感器DS18B20的基本知识,体会到了综合学习系统的易用性与易学性,这一期我们将一起学习无线电遥控的基本原理与应用实例。
先看一下我们将要使用的51单片机综合学习系统能完成哪些实验与产品开发工作:分别有流水灯,数码管显示,液晶显示,按键开关,蜂鸣器奏乐,继电器控制,IIC总线,SPI总线,PS/2实验,AD模数转换,光耦实验,串口通信,红外线遥控,无线遥控,温度传感,步进电机控制等等。
图1 51单片机综合学习系统上图是我们将要使用的51单片机综合学习系统硬件平台,如图1所示,本期实验我们用到了综合系统主机、200米无线遥控器,无线接收板,综合系统其它功能模块原理与使用详见前几期《电子制作》杂志及后期连载教程介绍。
PT2262/PT2272无线模块工作原理PT2262/2272是台湾普城公司生产的一种CMOS工艺制造的低功耗低价位通用编/解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。
PT2262/2272最多可有12位(A0-A11)三态(悬空,接高电平,接低电平)地址设定管脚,任意组合可提供531441个地址码。
PT2262最多可有6位(D0-D5)数据端管脚,设定的地址码和数据码从17脚(Dout)串行输出,可用于无线遥控发射电路。
PT2262和PT2272的引脚排列见图2。
对于编码器PT2262,A0~A5共6根线为地址线,而A6~A11共6根线可以作为地址线,也可以作为数据线,这要取决于所配合使用的解码器。
若解码器没有数据线,则A6~A11作为地址线使用,这种情况下,A0~A11共12根地址线,每线都可以设置成“1”、“O”、“开路”三种状态之一,因此共有编码数312=531441种;但若配对使用的解码器的A6~A11是数据线,例如PT2272,那么这时PT2262的A6~A11也作为数据线用,并只可设置为“1”和“0”两种状态之一,而地址线只剩下A0~A5共6根,编码数降为36=729种。
基于51单片机的WIFI无线控制系统设计与实现

基于51单片机的WIFI无线控制系统设计与实现发表时间:2018-10-08T15:36:52.577Z 来源:《新材料.新装饰》2018年5月下作者:赵金永[导读] 随着移动技术的不断发展,整个世界在走向移动化。
现阶段,通信技术正面临一场深刻的变革,传统的有线网络已不能满足日益增长的通信需要。
无线通信技术越来越受到关注,人们需要一种不受约束的通信技术,能够随时随地的获取信息。
随着互联网越来越深入的走进人们的生活,用户对能够随时随地上网的需求越来越迫切,WIFI 无线通信技术也得到了迅速发展。
本文研究了51单片机的WIFI无线控制系统。
(广州沣雷交通科技股份有限公司,广州市 510000)摘要:随着移动技术的不断发展,整个世界在走向移动化。
现阶段,通信技术正面临一场深刻的变革,传统的有线网络已不能满足日益增长的通信需要。
无线通信技术越来越受到关注,人们需要一种不受约束的通信技术,能够随时随地的获取信息。
随着互联网越来越深入的走进人们的生活,用户对能够随时随地上网的需求越来越迫切,WIFI 无线通信技术也得到了迅速发展。
本文研究了51单片机的WIFI无线控制系统。
WiFi(Wireless Fidelity)是无线局域网(WLAN)技术——IEEE 802.11系列标准的商用名称。
IEEE 802.11系列标准主要包括IEEE802.11a/b/g/n 5种。
WIFI是由AP ( Access Point)和无线网卡组成的无线网络。
AP一般称为网络桥接器或接入点, 它是当作传统的有线局域网络与无线局域网络之间的桥梁, 因此任何一台装有无线网卡的PC均可透过AP去分享有线局域网络甚至广域网络的资源。
WIFI主要技术优点是无线接入、高速传输以及传输距离远其中, 802.11n 可以将WLAN的传输速率由目前802.11a及802.11g提供的54Mbps,提高到300Mbps甚至高达600Mbps。
在开放性区域通讯距离可达305m,在封闭性区域通讯距离76 ~ 122m,方便与现有的有线以太网整合,组网的成本更低。
无线wifi模块-51单片机-C语言程序

{
ESP8266_Set("AT+CIPSEND=0,4");
while(*puf!='\0') //遇到空格跳出循环
{
Send_Uart(*puf); //向WIFI模块发送控制指令。
us_delay(5);
********************************************************************/
#include <reg52.h>//包含头文件
#define uint unsigned int
#define uchar unsigned char
#define载入值
puf++;
}
us_delay(5);
Send_Uart('\n'); //换行
ms_delay(10);
}
/********************************************************************
名称:主函数
作用:程序的执行入口
********************************************************************/
二、关于安卓手机方面
测试时可以使用,网络调试助手(下载这个app安装在手机即可)发送数字1表示小灯亮,0表示灯灭。后续想深入的话可以自己开发安卓app软件。
三、参数设置
由于参数的设置方法和步奏网上资料很全,这里提供相关的网址自行参考。
Uart-W
PT2262-PT2272无线收发讲解

51单片机综合学习系统之无线遥控模块应用篇《电子制作》2008年6月站长原创,如需引用请注明出处大家好,通过以前的学习,我们已经对51单片机综合学习系统的使用方法及学习方式有所了解与熟悉,学会了数字温度传感器DS18B20的基本知识,体会到了综合学习系统的易用性与易学性,这一期我们将一起学习无线电遥控的基本原理与应用实例。
先看一下我们将要使用的51单片机综合学习系统能完成哪些实验与产品开发工作:分别有流水灯,数码管显示,液晶显示,按键开关,蜂鸣器奏乐,继电器控制,IIC总线,SPI总线,PS/2实验,AD模数转换,光耦实验,串口通信,红外线遥控,无线遥控,温度传感,步进电机控制等等。
图1 51单片机综合学习系统上图是我们将要使用的51单片机综合学习系统硬件平台,如图1所示,本期实验我们用到了综合系统主机、200米无线遥控器,无线接收板,综合系统其它功能模块原理与使用详见前几期《电子制作》杂志及后期连载教程介绍。
PT2262/PT2272无线模块工作原理PT2262/2272是台湾普城公司生产的一种CMOS工艺制造的低功耗低价位通用编/解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。
PT2262/2272最多可有12位(A0-A11)三态(悬空,接高电平,接低电平)地址设定管脚,任意组合可提供531441个地址码。
PT2262最多可有6位(D0-D5)数据端管脚,设定的地址码和数据码从17脚(Dout)串行输出,可用于无线遥控发射电路。
PT2262和PT2272的引脚排列见图2。
对于编码器PT2262,A0~A5共6根线为地址线,而A6~A11共6根线可以作为地址线,也可以作为数据线,这要取决于所配合使用的解码器。
若解码器没有数据线,则A6~A11作为地址线使用,这种情况下,A0~A11共12根地址线,每线都可以设置成“1”、“O”、“开路”三种状态之一,因此共有编码数312=531441种;但若配对使用的解码器的A6~A11是数据线,例如PT2272,那么这时PT2262的A6~A11也作为数据线用,并只可设置为“1”和“0”两种状态之一,而地址线只剩下A0~A5共6根,编码数降为36=729种。
51单片机对315M、443M无线遥控波形分析

最近想做无线遥控,在网上没有找到好的资料,要想做好无线遥控,就要清楚无线遥控的波形,最好用示波器,但太贵了,自己动手先做一简单的示波器,利用声卡当示波器,很好用,对红外遥控、315M/443M无线遥控、51单片机串口分析等足够用了。
下面是我做的图片:1、硬件(音频线1根,万用表表笔1付);2软件。
这就是硬件,一根音频线各和两只表笔。
(10元钱不到)双通示波器表笔接测式端,屏蔽线接地。
音频线插头插入“话筒输入端”这是软件CoolEdit2.0值得注意的是接收到的波形图是通过声卡后反了相的,可以通过软件编辑反相,能接收到发送的波形图,就好办了,对波形图分析,就可以解码,可以根据对波形图分析理解,找到你自己的解码方式。
这是用声卡示波器对315M/443M无线遥控接收到的波形图:通过对波形的分析,好像是很乱,这就是为什么很多初学者无线遥控解码失败的原因,在没有接收到无线遥控信号时,也有一些乱的波形,有些朋友想用315M/443M无线遥控模块做串口通信,结果发现接收到很多乱码,而且不停的接收到。
你会看到波形有突然的变化,放大后,你就会发现有一定的规律,首先有一段比较长的波形,通过软件可以看出有多少ms(大概13ms),这就是同步码,后面有25短的波形,这就是PT2262的编码格式。
首先要识别出同步码,这个很关键,我们在做发射编码时也要做这个,一般为10-20ms,这是区别于乱码的标志。
下面说说我是怎样解码的,利用51单片机,接收信号接到P3.2,用下降沿外部中断。
检测每2次下降沿中断的时间,用T1计时;每2次下降沿之间的高电平段的时间,用T0计时;这是常用的PT2262的格式,首先要检测到同步码,每两次中断的时间大于(T1计时)12ms;检测到同步码后才开始解码,如果接收到的高电平在450us左右为“0”;如果接收到的高电平在1300us左右为“1”;这样我们就能解码了。
这是我的解码程序:#include <STC12C5A60S2.h>#include <intrins.h>#include<stdlib.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned intuint INT0_H_timer=0;//两个下降沿之间的高电平宽度uint INT0_L_timer=0;//两个下降沿总宽度bit DBM =0;//同步码标志long DATA=0;//取得24位数据(暂存);long DATAZ=0;//取得24位数据(比较暂存);long DATAX=0;//取数据uchar DATA_x=0;//取数据次数;//uint INT0_H[24]={0,};uchar TY=0;//连续取数标志void InitTimer0(void)//T0用于计两个下降沿之间的高电平宽度{TMOD |= 0x09;//T0加门控计高电平宽度TH0 = 0x00;TL0 = 0x00;ET0 = 0;//关T0定时中断TR0 = 1;TF0=0;//溢出清0}void InitTimer1(void)//T1用于计两个下降沿总宽度{TMOD |= 0x10;TH1 = 0x00;TL1 = 0x00;ET1 = 0;//关T1定时中断TR1 = 1;TF1=0;//溢出清0}void INT0_int()//外部中断初始化{IT0=1;//下降沿EX0=1;EA=1;}void main(void){uchar x=12,y=0;// AUXR &= 0x7F; //定时器时钟12T模式InitTimer0();InitTimer1();INT0_int();TH0=10;TL0=10;while (1){P0=DATAX;}}void INT0Interrupt(void) interrupt 0{INT0_L_timer=TH1*256+TL1;//两个下降沿总宽度INT0_H_timer=TH0*256+TL0;//两个下降沿之间的高电平宽度TH0 = 0x00;TL0 = 0x00;TH1 = 0x00;TL1 = 0x00;if (TF0)//有溢出不取值出错{INT0_L_timer=0;//两个下降沿总宽度INT0_H_timer=0;//两个下降沿之间的高电平宽度TF0=0;TF1=0;DBM=0;DATA_x=0;// P0=0xfe;}//晶振22.1184、12分频,13~15ms为同步码if (INT0_L_timer>24000&&INT0_L_timer<27000)//晶振22.1184、12分频{DBM=1;//P0=0;}if (DBM)//取第3次同步码后的数据{if ((INT0_H_timer>600)&&(INT0_H_timer<1000))//350~500us为0{DATA &= 0xfffffe;if (DATA_x<23){DATA_x++;DATA=DATA<<1;}else{if (TY>=1){TY=0;if (DATAZ==DATA)//如果2次取数一致,读出数{DATAX=DATA;}else{INT0_L_timer=0;//两个下降沿总宽度INT0_H_timer=0;//两个下降沿之间的高电平宽度TF0=0;TF1=0;DBM=0;DATA_x=0;}}else{DATAZ=DATA;TY++;}DATA=0;DBM=0;DATA_x=0;// P0=0x7f;}}else if ((INT0_H_timer>2200)&&(INT0_H_timer<2600))//1200~1400us为1 {DATA |= 0x000001;if (DATA_x<23){DATA_x++;DATA=DATA<<1;}else{if (TY>=1){TY=0;if (DATAZ==DATA)//如果2次取数一致,读出数{DATAX=DATA;}else{INT0_L_timer=0;//两个下降沿总宽度INT0_H_timer=0;//两个下降沿之间的高电平宽度TF0=0;TF1=0;DBM=0;DATA_x=0;}}else{DATAZ=DATA;TY++;}DATA=0;DBM=0;DATA_x=0;// P0=0x7f;}}else//出错{INT0_L_timer=0;//两个下降沿总宽度INT0_H_timer=0;//两个下降沿之间的高电平宽度TF0=0;TF1=0;DBM=0;DATA_x=0;//P0=0xfd;}}}。
制作无线遥控模块的原理

制作无线遥控模块的原理无线遥控模块一般由发送端和接收端组成,其原理如下:1. 发送端原理:发送端是通过某种方式将指令转换成无线信号,并通过天线发射出去。
常见的原理有:- 调幅(Amplitude Modulation, AM):通过调制载波的幅度来表示指令信息,一般采用简单的AM电路或集成芯片实现。
- 调频(Frequency Modulation, FM):通过调制载波的频率来表示指令信息,一般采用FM发射芯片实现。
- 调相(Phase Modulation, PM):通过调制载波的相位来表示指令信息,一般采用PLL(Phase-Locked Loop)芯片实现。
发送端一般包含一个微控制器或是编码器,用于解析用户输入的指令,然后将解析出的指令信号通过上述方法调制到一个射频载波波形上,再经过功率放大器放大后,由天线发射出去。
2. 接收端原理:接收端主要负责将无线信号解调出来,还原出原始的指令信息。
常见的原理有:- 调幅解调(AM Demodulation):通过利用振荡电路产生一个参考振荡信号,并将接收到的调幅信号与参考信号进行解调,得到原始的指令信号。
- 调频解调(FM Demodulation):通过利用追踪敏感解调器或鉴频器对接收到的调频信号进行解调,得到原始的指令信号。
- 调相解调(PM Demodulation):通过利用鉴相器对接收到的调相信号进行解调,得到原始的指令信号。
接收端一般包含一个微控制器或解码器,用于解析接收到的信号,还原出原始的指令信号。
解析过程一般是根据事先约定好的协议和编码方式进行。
解码器根据解析出的指令信号产生相应的控制信号,用于控制被遥控对象(比如电器设备)的行为。