PLC传输指令
PLC功能指令—数据处理指令

2. 数据传送指令应用举例
【例题5.1】 设有8盏指示灯,控制要求是:当I0.0接通时,全部灯亮;当I0.1 接通时,奇数灯亮;当I0.2接通时,偶数灯亮;当I0.3接通时,电路图
例题5.1控制关系表
输入继电器
I0.0 I0.1 I0.2 I0.3
Q0.7 ● ●
Q0.6 ●
●
Q0.5 ● ●
输出继电器位
Q0.4 ●
●
Q0.3 ● ●
Q0.2 ●
●
Q0.1 ● ●
Q0.0 ●
●
输出继电器字节
QB0 16#FF 16#AA 16#55
0
例题5.1程序
模块五 功能指令
5.1
数据处理指令
一、转换指令
转换指令是对操作数的类型进行转换,并输出到指 定的目标地址中去。转换指令包括数据的类型转换、数 据的编码和译码指令以及字符串类型转换指令。
1、BCD码与整数之间的转换 2.双字整数转换为实数 3.四舍五入取整指令 4.截位取整指令 5.整数与双整数的转换 6.字节与整数的转换指令
转换指令如图:
二、传送指令
1.数据传送指令MOV
(1)数据传送指令的梯形图使用指令盒形式。指令盒由操作码MOV,数据 类型(B/W/DW),使能输入端EN,使能输出端ENO,源操作数IN和目标操作 数OUT构成。
(2)ENO可作为下一个指令盒EN的输入,即几个指令盒可以串联在一行 ,只有前一个指令盒被正确执行时,后一个指令盒才能执行。
plc中dmov指令的功能_概述及解释说明

plc中dmov指令的功能概述及解释说明1. 引言1.1 概述在现代工业自动化中,PLC(可编程逻辑控制器)扮演着至关重要的角色。
通过编程指令的方式,PLC能够对各种设备、机械和系统进行精确控制和协调操作。
DMOV(Direct Move)指令作为PLC中的一个重要指令之一,具有多种功能和应用。
本文旨在全面介绍和解释DMOV指令的功能,并进一步分析其在工业自动化中的实际应用场景。
1.2 文章结构本篇文章将分为五个主要部分进行阐述:引言、DMOV指令的功能概述、DMOV 指令的解释说明、实例演示与案例分析以及结论与展望。
首先,在引言部分将对整篇文章进行简要介绍,并阐述DMOV指令在PLC领域中的重要性和作用;其次,在DMOV指令的功能概述部分,将回顾PLC基础知识并重点讲解DMOV 指令的基本原理以及其在工业自动化场景下的应用;接着,在DMOV指令的解释说明部分,我们将详细讲解DMOV语法及参数设置,并深入分析该指令在运行过程中的具体执行步骤;随后,在实例演示与案例分析部分,将通过实际案例和操作演示来加深对DMOV指令的理解,并探讨其在不同应用场景下的优化建议;最后,在结论与展望部分,将总结文章内容要点,并对DMOV指令未来发展趋势进行展望。
1.3 目的本文旨在系统地介绍和解释PLC中DMOV指令的功能,并探讨其在工业自动化领域中的应用。
通过深入理解DMOV指令的语法、参数设置以及运行过程,读者能够更好地掌握该指令的使用方法,提高PLC编程水平。
同时,通过实例演示和案例分析,读者能够更好地理解并应用DMOV指令于实际工作中,并为相关领域的自动化项目提供优化建议。
最终,通过本文的阅读,读者将具备全面了解和把握DMOV指令功能及应用的知识基础。
2. DMOV指令的功能概述2.1 PLC基础知识回顾在介绍DMOV指令的功能之前,我们首先需要了解一些PLC(可编程逻辑控制器)的基础知识。
PLC是一种专门用于自动化控制的电子设备,它通过将输入信号进行逻辑运算,并根据结果驱动输出信号,从而实现对自动化系统的控制。
三菱PLC指令传送比较指令及实际应用
注:BCD变换指令可用于PLC内部的二进制数据变为七段显示等需要的BCD码而 向外部输出。
例10,若X1、2、3、5为“1”,其余的为“0”,当X10合上, 分析 Y0~Y7的状态。
图5-21
四、块传送
1.指令代码:FNC15,助记符:BMOV,BMOV(P) 2.功能:把指定操作数软元件区的内容传送到 目标操作数软 元件区中,连续源单元→连续目标单元。 3.格式
X0
S Dn
BMOV D5 D10 K3
S:KnX,KnY,KnM,KnS,T,C,D——指定源元件的首 地址 D:KnX,KnY,KnM,KnS,T,C,D——指定目标元件的 首地址 n:≤512 ——传送单元的数量
八、BIN交换指令
1.指令代码:FNC19 助记符:BIN (P)
16/32
2.功能:源操作数的BCD码转换成二进制数至
目标元件。
3.格式:
X10
SD
FNC19
BIN K2X0 D10
K2X0(BCD码) → D10(B二进制) 01011001(59)→ 00111011(B) 变换范围 16位:0~9999
例9:将S10~S41清零,将M32~M63置1
X0
FNC16
FMOV K0000 K4S10 K2
FNC16 HFFFF K4M32 K2 FMOV
六、数据交换指令
1.指令代码:FNC17 助记符:XCH,XCH(P),DXCH, DXCH(P)。
2.功能:指定目标软元件间进行数据交换。 3.格式:只有目标数 D1,D2,KnY,KnM,KnS,T,C, D,
plccall指令的用法及功能

PLCCALL指令是一种用于PLC编程的指令,它能够实现对PLC中的位置区域进行读写操作,从而实现对设备的控制和监控。
在工业自动化领域,PLCCALL指令被广泛应用于各类生产设备和系统中,能够提高生产效率、降低成本,并且具有很强的灵活性和可扩展性。
本文将对PLCCALL指令的用法及功能进行深入探讨,以帮助读者更好地理解和应用这一重要的PLC编程指令。
1. PLCCALL指令的基本概念PLCCALL指令是一种基于PLC编程语言的指令,它主要用于实现对PLC中的位置区域进行读写操作。
通过PLCCALL指令,程序可以向PLC发送数据,也可以从PLC读取数据,实现对设备状态的监控和控制。
在PLC编程中,PLCCALL指令通常与其他指令配合使用,实现对整个系统的自动化控制。
2. PLCCALL指令的使用方法在PLC编程中,要使用PLCCALL指令,首先需要了解PLC的通讯协议和位置区域映射规则。
通常情况下,PLC的通讯协议包括以太网通讯、Modbus通讯等,而位置区域映射规则则规定了PLC中各个位置区域的含义和使用方法。
在了解了这些基本知识之后,就可以开始使用PLCCALL指令进行编程了。
在实际编程中,需要按照指定的通讯协议和位置区域映射规则,使用PLCCALL指令发送或接收数据,从而实现对设备的控制和监控。
3. PLCCALL指令的功能和特点PLCCALL指令具有多种功能和特点,包括高效的数据传输、灵活的位置区域映射、可靠的通讯协议等。
通过PLCCALL指令,可以实现对设备状态的实时监控,也可以实现对设备控制命令的下发。
另外,PLCCALL指令还具有很强的可扩展性,可以适应各种复杂的工业自动化场景。
PLCCALL指令还支持多种数据类型的传输,包括数字、字符串、浮点数等,能够满足不同场景下的数据传输需求。
4. 个人观点和理解从我个人的观点来看,PLCCALL指令是一种非常重要的PLC编程指令,它能够实现对设备的远程控制和监控,为工业自动化系统的实现提供了很大的便利。
松下PLC指令
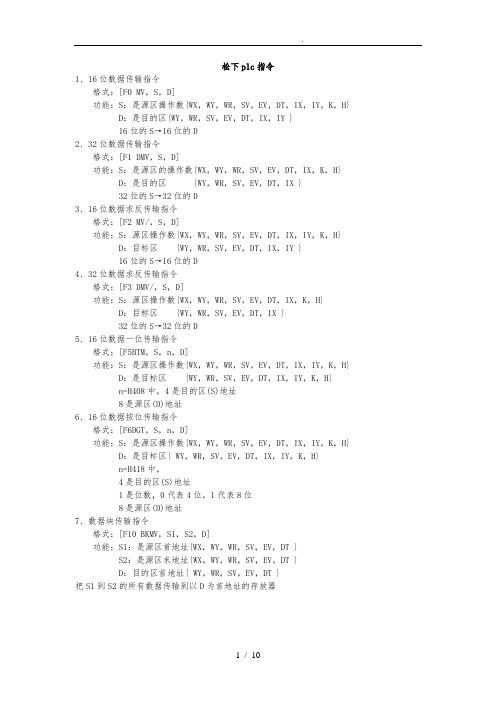
松下plc指令1、16位数据传输指令格式:[F0 MV,S,D]功能:S:是源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:是目的区{WY,WR,SV,EV,DT,IX,IY }16位的S→16位的D2、32位数据传输指令格式:[F1 DMV,S,D]功能:S:是源区的操作数{WX,WY,WR,SV,EV,DT,IX,K,H} D:是目的区 {WY,WR,SV,EV,DT,IX }32位的S→32位的D3、16位数据求反传输指令格式:[F2 MV/,S,D]功能:S:源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:目标区 {WY,WR,SV,EV,DT,IX,IY }16位的S→16位的D4、32位数据求反传输指令格式:[F3 DMV/,S,D]功能:S:源区操作数{WX,WY,WR,SV,EV,DT,IX,K,H} D:目标区 {WY,WR,SV,EV,DT,IX }32位的S→32位的D5、16位数据一位传输指令格式:[F5BTM,S,n,D]功能:S:是源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:是目标区 {WY,WR,SV,EV,DT,IX,IY,K,H} n=H408中,4是目的区(S)地址8是源区(D)地址6、16位数据按位传输指令格式:[F6DGT,S,n,D]功能:S:是源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:是目标区{ WY,WR,SV,EV,DT,IX,IY,K,H}n=H418中,4是目的区(S)地址1是位数,0代表4位,1代表8位8是源区(D)地址7、数据块传输指令格式:[F10 BKMV,S1,S2,D]功能:S1:是源区首地址{WX,WY,WR,SV,EV,DT }S2:是源区末地址{WX,WY,WR,SV,EV,DT }D:目的区首地址{ WY,WR,SV,EV,DT }把S1到S2的所有数据传输到以D为首地址的存放器8、数据复制指令格式:[F11 COPY,S,D1,D2]功能:S:源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D1:目标区首地址{ WY,WR,SV,EV,DT }D2:目标区末地址{ WY,WR,SV,EV,DT }将操作数S复制到D1到D2的存放器9、16位数据交换指令格式:[F15 XCH,D1,D2]功能:D1:源区操作数{WX,WY,WR,SV,EV,DT,IX, K,H} D2:目标区操作数{ WY,WR,SV,EV,DT,IX }将D1和D2两个操作数对换10、32位数据交换指令格式:[F16DXCH,D1,D2]功能:D1:源区操作数{WX,WY,WR,SV,EV,DT,IX, K,H} D2:目标区操作数{ WY,WR,SV,EV,DT,IX }将D1和D2两个操作数对换11、16位数据中的高/低字节交换指令格式:[F17 SWAP,D]功能:D:源区操作数{ WY,WR,SV,EV,DT,IX, IY}将D1和D2两个操作数对换12、16位数据加法指令格式:[F20+,S,D]功能:S:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S和D两个操作数相加后结果存在D中13、32位数据加法指令格式:[F21 D+,S,D]功能:S:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:被加数{WY,WR,SV,EV,DT,IX,IY }将S和D两个操作数相加后结果存在D中13、32位数据加法传输指令格式:[F22 +,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个操作数相加后结果存在D中14、32位数据加法传输指令格式:[F23 D+,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个操作数相加后结果存在D中15、16位数据减法指令格式:[F25 -,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:减数{WY,WR,SV,EV,DT,IX,IY }D减S后结果存放在D中16、16位数据减法指令格式:[F26 -,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:减数{WY,WR,SV,EV,DT,IX,IY }D减S后结果存放在D中17、16位数据减法传输指令格式:[F27 -,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减S2后结果存放在D中18、32位数据减法传输指令格式:[F28 -,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减S2后结果存放在D中19、16位数据乘法传输指令格式:[F30 *,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果〔32位〕{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中20、32位数据乘法传输指令格式:[F31 D*,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果〔64位〕{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中21、16位数据除法传输指令格式:[F32 %,S1,S2,D]功能:S1:除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:商{WY,WR,SV,EV,DT,IX,IY }S1除以S2后商存放在D中,余数放到DT9015中格式:[F33D%,S1,S2,D]功能:S1:除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:商{WY,WR,SV,EV,DT,IX,IY }S1除以S2后商存放在D中,余数放到DT9016 DT9015(低位)中23、16位数据加1指令格式:[F35 +1, D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D加1→D24、32位数据加1指令格式:[F36D+1, D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D加1→D25、16位数据减1指令格式:[F37 -1, D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D减1→D26、32位数据减1指令格式:[F38 D-1, D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D减1→D27、4位BCD数据加法指令格式:[F40 B+,S,D]功能:S:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:加数{WY,WR,SV,EV,DT,IX,IY }D加上S后结果存放在D中28、8位BCD数据加法指令格式:[F41 DB+,S,D]功能:S:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:加数{WY,WR,SV,EV,DT,IX,IY }D加上S后结果存放在D中29、4位BCD数据加法传输指令格式:[F42 B+,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1加上S2后结果存放在D中30、8位BCD数据加法传输指令格式:[F43 DB+,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1加上S2后结果存放在D中格式:[F45 B-,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:减数{WY,WR,SV,EV,DT,IX,IY }D减去S后结果存放在D中32、8位BCD数据减法指令格式:[F46 DB-,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:减数{WY,WR,SV,EV,DT,IX,IY }D减去S后结果存放在D中33、4位BCD数据减法传输指令格式:[F47 B-,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减去S2后结果存放在D中34、8位BCD数据减法传输指令格式:[F48 DB-,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减去S2后结果存放在D中35、4位BCD数据乘法传输指令格式:[F50 B*,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中36、8位BCD数据乘法传输指令格式:[F51DB*,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中37、4位BCD数据除法传输指令格式:[F52 B%,S1,S2,D]功能:S1:除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H} S2:被除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1除以S2后结果存放在D中38、8位BCD数据除法传输指令格式:[F53 DB%,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中39、4位BCD加1指令格式:[F55B+1,D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D加1后储存在D中40、8位BCD加1指令格式:[F56 DB+1,D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D加1后储存在D中41、4位BCD减1指令格式:[F57 B-1,D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D减1后储存在D中42、8位BCD减1指令格式:[F58 DB-1,D]功能:D:存放器{WY,WR,SV,EV,DT,IX,IY }D减1后储存在D中43、16位数据比拟指令格式:[F60CMP,S1,S2]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>〞用触电R900B表示“=〞用触点R900C表示“<〞注意:判断触电要紧跟着比拟指令F6044、32位数据比拟指令格式:[F61 DCMP,S1,S2]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>〞用触电R900B表示“=〞用触点R900C表示“<〞注意:判断触电要紧跟着比拟指令F6045、16位数据区段比拟指令格式:[F62 WIN,S1,S2,S3]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S3:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>〞用触电R900B表示“=〞用触点R900C表示“<〞当S1>S3时R900A接通,S2<=S1<=S3时R900B接通,S1<S2时R900C接通注意:判断触电要紧跟着比拟指令F6046、32位数据区段比拟指令格式:[F63 DWIN,S1,S2,S3]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S3:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>〞用触电R900B表示“=〞用触点R900C表示“<〞当S1>S3时R900A接通,S2<=S1<=S3时R900B接通,S1<S2时R900C接通注意:判断触电要紧跟着比拟指令F6047、位数据块比拟指令格式:[F64BWIN,S1,S2,S3]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S3:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>〞用触电R900B表示“=〞用触点R900C表示“<〞当S1>S3时R900A接通,S2<=S1<=S3时R900B接通,S1<S2时R900C接通注意:判断触电要紧跟着比拟指令F6048、16位数据与运算指令格式:[F65 WAN,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个存放器的容安位相与后结果存在D中49、16位数据或运算指令格式:[F66 WOR,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个存放器的容安位相或后结果存在D中50、16位数据异或运算指令格式:[F67 XOR,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个存放器的容安位相异或后结果存在D中一样为0 不一样为 151、16位数据异或非运算指令格式:[F68 XNR,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个存放器的容安位相异或后结果存在D中一样为0 不一样为 152、区块检查计算指令格式:[F70 BCC,S1,S2,S3,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:存放器{WX,WY,WR,SV,EV,DT }S3:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }通过S1的设定〔K0:加,K1:减,K2:执行运算〕执行或运算,计算从数据存放器S2开场的12个字节的ASCⅡ码数据的区块检查码〔BCC〕,区块检查码〔BCC〕存储在数据存放器的低按字节53、十六进制数据转换为ASCⅡ码指令格式:[F71 HEXA,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT}S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器{WY,WR,SV,EV,DT,IX }54、ASCⅡ码转换为十六进制数据指令格式:[F72 AHEX,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }55、十六进制数据转换为ASCⅡ码指令格式:[F72 AHEX,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }56、BCD数据转换为ASCⅡ码指令格式:[F73BCDA,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }56、ASCⅡ码转换为BCD数据指令格式:[F74ABCD,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }57、16位数据转换为ASCⅡ码指令格式:[F75BINA,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }58、ASCⅡ码转换为16位数据指令格式:[F76ABIN,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }59、32位数据转换为ASCⅡ码指令格式:[F77DBINA,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }60、ASCⅡ码转换为32位数据指令格式:[F78DABIN,S1,S2,D]功能:S1:存放器{WX,WY,WR,SV,EV,DT }S2:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX }61、16位二进制数据转换为4位BCD码指令格式:[F80BCD,S,D]功能:S:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:存放器 {WY,WR,SV,EV,DT,IX ,IY }将S中的容转换为4位BCD码62、4位BCD码转换为16位二进制数据指令格式:[F81 BIN,S,D]功能:S:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:存放器 {WY,WR,SV,EV,DT,IX ,IY }将S中的容转换为16位二进制数据63、32位数据转换为8位BCD码指令格式:[F82DBCD,S,D]功能:S:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:存放器 {WY,WR,SV,EV,DT,IX ,IY }将S中的容转换为8位BCD码64、4位BCD码转换为32位二进制数据指令格式:[F83DBIN,S,D]功能:S:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H} D:存放器 {WY,WR,SV,EV,DT,IX ,IY }将S中的容转换为32位二进制数据65、16位数据求反指令格式:[F84INV,D]功能:D:存放器{ WY,WR,SV,EV,DT,IX,IY }将D中的容求反后存放到D中65、16位数据求补指令格式:[F85NEG,D]功能:D:存放器{ WY,WR,SV,EV,DT,IX,IY }将D中的容求补后存放到D中66、32位数据求补指令格式:[F86NEG,D]功能:D:存放器{ WY,WR,SV,EV,DT,IX,IY }将D中的容求补后存放到D中67、16位数据绝对值指令格式:[F87ABS,D]功能:D:存放器{ WY,WR,SV,EV,DT,IX,IY }将D中的容求绝对值后存放到D中68、32位数据绝对值指令格式:[F88DABS,D]功能:D:存放器{ WY,WR,SV,EV,DT,IX,IY }将D中的容求绝对值后存放到D中69、16位数据符号位扩展指令格式:[F89EXT,D]功能:D:存放器{ WY,WR,SV,EV,DT,IX }将D中的16位数据扩展为32位,存放在D和D+1中70、数据解码指令格式:[F90DECO,S,n,D]功能:S:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H} n:存放器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:存放器 {WY,WR,SV,EV,DT,IX ,IY }例:n=H302,3代表开场解码的数据位,2代表解码的位数。
欧姆龙plc传送指令用法
欧姆龙plc传送指令用法1. 欧姆龙 plc 传送指令,那可是个超级厉害的家伙呀!就像你要把一个宝贝从一个地方快速、准确地送到另一个地方一样。
比如你有一组数据,要把它从一个寄存器传到另一个寄存器,这时候传送指令就大显身手啦!2. 欧姆龙 plc 传送指令的用法,很值得好好探究一番呢!好比你是个快递员,要把包裹完好无损地送到目的地,传送指令就是你的得力工具呀。
像把温度值从一个地方传到另一个地方去监控,多神奇!3. 哇塞,欧姆龙 plc 传送指令用法,这可不是一般人能随便掌握的哦!但一旦你学会了,那可不得了,就像你掌握了魔法一样。
比如说,要把生产线上的计数数值传送给上位机,传送指令就能轻松做到!4. 欧姆龙 plc 传送指令的重要性,你可别小瞧啊!这就好像建房子的基石一样。
打个比方,你要把机器的运行状态传到操作面板上,没有传送指令怎么行呢?5. 嘿,欧姆龙 plc 传送指令用法可太关键啦!要是不懂这个,那不就像开车不会打方向盘一样嘛。
比如你想把传感器采集的数据快速地转移到存储区,这时就得靠传送指令啦!6. 欧姆龙 plc 传送指令的魅力,真的是让人难以抗拒呀!就好比是一场精彩的接力赛,一棒接一棒地传递信息呢。
比如要把设备的故障代码传出来进行报警,传送指令绝对必不可少!7. 欧姆龙 plc 传送指令,可真是个宝贝啊!想想看,要是没有它,那不就像失去了翅膀的鸟儿。
举个例子,你要把加工进度的数据传送给管理系统,传送指令就能帮你搞定!8. 欧姆龙 plc 传送指令的用法,真的超级重要,一定要熟练掌握呀!就好像战士手中的武器一样不可或缺。
比如要把设备的运行参数稳定地传输到控制系统,靠的就是它呢!我觉得欧姆龙 plc 传送指令用法真的需要我们认真去研究和掌握,只有这样才能在工业控制中如鱼得水呀!。
欧姆龙plcmovl指令

欧姆龙plcmovl指令
欧姆龙(Omron)PLC(可编程逻辑控制器)中的MOVL指令是一种用于数据移动的指令。
MOVL指令的主要作用是将源地址中的数据复制到目标地址中。
这个指令在PLC编程中非常常用,因为它可以帮助我们实现数据的快速传输和处理。
MOVL指令的基本语法是:MOVL Dm, Dn。
其中,Dm表示源地址,Dn表示目标地址。
这两个地址可以是任何有效的数据寄存器或内存地址。
当MOVL指令执行时,PLC会将Dm地址中的数据读取出来,然后将其复制到Dn地址中。
MOVL指令的特点之一是它可以进行长字(32位)数据的移动。
这意味着它可以一次性移动4个字节的数据,这在处理大量数据时非常高效。
此外,MOVL指令还可以与其他指令组合使用,以实现更复杂的数据处理和控制逻辑。
在实际应用中,MOVL指令可以用于多种场景。
例如,在数据采集和传输系统中,我们可以使用MOVL指令将传感器采集的数据从输入寄存器移动到处理寄存器中,以便进行后续的数据处理和分析。
在控制系统中,我们可以使用MOVL指令将控制参数从存储器移动到控制寄存器中,以实现对设备的精确控制。
总之,欧姆龙PLC中的MOVL指令是一种非常实用的数据移动指令。
它可以帮助我们实现快速、高效的数据传输和处理,从而提高PLC的控制能力和系统性能。
在PLC编程中,熟练掌握MOVL指令的使用方法和技巧是非常重要的。
西门子PLC指令

西门子PLC指令西门子PLC指令PLC,即可编程控制器,是一种用于自动化控制的电子设备。
西门子PLC指令是指西门子公司生产的PLC编程指令集。
以下是一些常用的西门子PLC指令:1. LD指令:LD指令是一种逻辑指令,它用于将一个变量的值加载到一个寄存器中。
例如,LDI 100将数字100加载到寄存器中。
2. MOV指令:MOV指令是一种数据传输指令,它用于将一个变量的值从一个寄存器传输到另一个寄存器中。
例如,MOVD A,B将A寄存器的值传输到B寄存器中。
3. ADD指令:ADD指令是一种加法指令,它用于将两个变量相加并将结果存储到一个寄存器中。
例如,ADD A,B将A寄存器中的值加上B寄存器中的值并将结果存储到A寄存器中。
4. SUB指令:SUB指令是一种减法指令,它用于将一个变量从另一个变量中减去并将结果存储到一个寄存器中。
例如,SUB A,B将B寄存器中的值从A寄存器中的值中减去并将结果存储到A寄存器中。
5. AND指令:AND指令是一种逻辑指令,它用于将两个变量进行逻辑与操作,并将结果存储到一个寄存器中。
例如,AND A,B将A寄存器中的值与B寄存器中的值进行逻辑与操作,并将结果存储到A寄存器中。
6. OR指令:OR指令是一种逻辑指令,它用于将两个变量进行逻辑或操作,并将结果存储到一个寄存器中。
例如,OR A,B将A寄存器中的值与B寄存器中的值进行逻辑或操作,并将结果存储到A寄存器中。
7. JMP指令:JMP指令是一种跳转指令,它用于将执行的代码跳转到指定的地址。
例如,JMP 100将执行的代码跳转到地址100处。
8. CALL指令:CALL指令是一种调用指令,它用于将执行的代码跳转到指定的子程序。
例如,CALL 200将执行的代码跳转到子程序200处。
9. RET指令:RET指令是一种返回指令,它用于从子程序中返回到主程序。
例如,RET将程序从子程序返回到主程序。
以上是一些常用的西门子PLC指令,当然还有其他很多种指令,这些指令可以根据不同的应用场景进行组合,形成不同的PLC程序。
松下PLC指令

松下PLC指令松下plc指令1、16位数据传输指令格式:[F0 MV,S,D]功能:S:是源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:是目的区{WY,WR,SV,EV,DT,IX,IY }16位的S→16位的D2、32位数据传输指令格式:[F1 DMV,S,D]功能:S:是源区的操作数{WX,WY,WR,SV,EV,DT,IX,K,H}D:是目的区{WY,WR,SV,EV,DT,IX }32位的S→32位的D3、16位数据求反传输指令格式:[F2 MV/,S,D]功能:S:源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:目标区{WY,WR,SV,EV,DT,IX,IY }16位的S→16位的D4、32位数据求反传输指令格式:[F3 DMV/,S,D]功能:S:源区操作数{WX,WY,WR,SV,EV,DT,IX,K,H}D:目标区{WY,WR,SV,EV,DT,IX }32位的S→32位的D5、16位数据一位传输指令格式:[F5 BTM,S,n,D]功能:S:是源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:是目标区{ WY,WR,SV,EV,DT,IX,IY,K,H}n=H408中,4是目的区(S)地址8是源区(D)地址6、16位数据按位传输指令格式:[F6 DGT,S,n,D]功能:S:是源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:是目标区{ WY,WR,SV,EV,DT,IX,IY,K,H}n=H418中,4是目的区(S)地址1是位数,0代表4位,1代表8位8是源区(D)地址7、数据块传输指令格式:[F10 BKMV,S1,S2,D]功能:S1:是源区首地址{WX,WY,WR,SV,EV,DT }S2:是源区末地址{WX,WY,WR,SV,EV,DT }D:目的区首地址{ WY,WR,SV,EV,DT }把S1到S2内的所有数据传输到以D为首地址的寄存器8、数据复制指令格式:[F11 COPY,S,D1,D2]功能:S:源区操作数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D1:目标区首地址{ WY,WR,SV,EV,DT }D2:目标区末地址{ WY,WR,SV,EV,DT }将操作数S复制到D1到D2的寄存器9、16位数据交换指令格式:[F15 XCH,D1,D2]功能:D1:源区操作数{WX,WY,WR,SV,EV,DT,IX,K,H}D2:目标区操作数{ WY,WR,SV,EV,DT,IX }将D1和D2两个操作数对换10、32位数据交换指令格式:[F16 DXCH,D1,D2]功能:D1:源区操作数{WX,WY,WR,SV,EV,DT,IX,K,H}D2:目标区操作数{ WY,WR,SV,EV,DT,IX }将D1和D2两个操作数对换11、16位数据中的高/低字节交换指令格式:[F17 SWAP,D]功能:D:源区操作数{ WY,WR,SV,EV,DT,IX,IY}将D1和D2两个操作数对换12、16位数据加法指令格式:[F20 +,S,D]功能:S:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S和D两个操作数相加后结果存在D 中13、32位数据加法指令格式:[F21 D+,S,D]功能:S:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S和D两个操作数相加后结果存在D 中13、32位数据加法传输指令格式:[F22 +,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个操作数相加后结果存在D中14、32位数据加法传输指令格式:[F23 D+,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:被加数{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个操作数相加后结果存在D中15、16位数据减法指令格式:[F25 -,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:减数{WY,WR,SV,EV,DT,IX,IY }D减S后结果存放在D中16、16位数据减法指令格式:[F26 -,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:减数{WY,WR,SV,EV,DT,IX,IY }D减S后结果存放在D中17、16位数据减法传输指令格式:[F27 -,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减S2后结果存放在D中18、32位数据减法传输指令格式:[F28 -,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减S2后结果存放在D中19、16位数据乘法传输指令格式:[F30 *,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果(32位){WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中20、32位数据乘法传输指令格式:[F31 D*,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果(64位){WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中21、16位数据除法传输指令格式:[F32 %,S1,S2,D]功能:S1:除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:商{WY,WR,SV,EV,DT,IX,IY }S1除以S2后商存放在D中,余数放到DT9015中22、32位数据除法传输指令格式:[F33 D%,S1,S2,D]功能:S1:除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:商{WY,WR,SV,EV,DT,IX,IY }S1除以S2后商存放在D中,余数放到DT9016 DT9015(低位)中23、16位数据加1指令格式:[F35 +1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D加1→D24、32位数据加1指令格式:[F36 D+1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D加1→D25、16位数据减1指令格式:[F37 -1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D减1→D26、32位数据减1指令格式:[F38 D-1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D减1→D27、4位BCD数据加法指令格式:[F40 B+,S,D]功能:S:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:加数{WY,WR,SV,EV,DT,IX,IY }D加上S后结果存放在D中28、8位BCD数据加法指令格式:[F41 DB+,S,D]功能:S:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:加数{WY,WR,SV,EV,DT,IX,IY }D加上S后结果存放在D中29、4位BCD数据加法传输指令格式:[F42 B+,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1加上S2后结果存放在D中30、8位BCD数据加法传输指令格式:[F43 DB+,S1,S2,D]功能:S1:加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被加数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1加上S2后结果存放在D中31、4位BCD数据减法指令格式:[F45 B-,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:减数{WY,WR,SV,EV,DT,IX,IY }D减去S后结果存放在D中32、8位BCD数据减法指令格式:[F46 DB-,S,D]功能:S:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:减数{WY,WR,SV,EV,DT,IX,IY }D减去S后结果存放在D中33、4位BCD数据减法传输指令格式:[F47 B-,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减去S2后结果存放在D中34、8位BCD数据减法传输指令格式:[F48 DB-,S1,S2,D]功能:S1:减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被减数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1减去S2后结果存放在D中35、4位BCD数据乘法传输指令格式:[F50 B*,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中36、8位BCD数据乘法传输指令格式:[F51 DB*,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中37、4位BCD数据除法传输指令格式:[F52 B%,S1,S2,D]功能:S1:除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被除数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1除以S2后结果存放在D中38、8位BCD数据除法传输指令格式:[F53 DB%,S1,S2,D]功能:S1:乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:被乘数{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:结果{WY,WR,SV,EV,DT,IX,IY }S1乘以S2后结果存放在D中39、4位BCD加1指令格式:[F55 B+1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D加1后储存在D中40、8位BCD加1指令格式:[F56 DB+1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D加1后储存在D中41、4位BCD减1指令格式:[F57 B-1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D减1后储存在D中42、8位BCD减1指令格式:[F58 DB-1,D]功能:D:寄存器{WY,WR,SV,EV,DT,IX,IY }D减1后储存在D中43、16位数据比较指令格式:[F60 CMP,S1,S2]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>”用触电R900B 表示“=”用触点R900C表示“<”44、32位数据比较指令格式:[F61 DCMP,S1,S2]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>”用触电R900B 表示“=”用触点R900C表示“<”注意:判断触电要紧跟着比较指令F60 45、16位数据区段比较指令格式:[F62 WIN,S1,S2,S3]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S3:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>”用触电R900B 表示“=”用触点R900C表示“<”当S1>S3时R900A接通,S2<=S1<=S3时R900B接通,S1<S2时R900C接通46、32位数据区段比较指令格式:[F63 DWIN,S1,S2,S3]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S3:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>”用触电R900B 表示“=”用触点R900C表示“<”当S1>S3时R900A接通,S2<=S1<=S3时R900B接通,S1<S2时R900C接通注意:判断触电要紧跟着比较指令F60 47、位数据块比较指令格式:[F64 BWIN,S1,S2,S3]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S3:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}用触电R900A表示“>”用触电R900B 表示“=”用触点R900C表示“<”当S1>S3时R900A接通,S2<=S1<=S3时R900B接通,S1<S2时R900C接通注意:判断触电要紧跟着比较指令F60 48、16位数据与运算指令格式:[F65 WAN,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个寄存器的内容安位相与后结果存在D中49、16位数据或运算指令格式:[F66 WOR,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个寄存器的内容安位相或后结果存在D中50、16位数据异或运算指令格式:[F67 XOR,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个寄存器的内容安位相异或后结果存在D中相同为0 不相同为151、16位数据异或非运算指令格式:[F68 XNR,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX,IY }将S1和S2两个寄存器的内容安位相异或后结果存在D中相同为0 不相同为152、区块检查计算指令格式:[F70 BCC,S1,S2,S3,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}S2:寄存器{WX,WY,WR,SV,EV,DT }S3:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }通过S1的设定(K0:加,K1:减,K2:执行运算)执行或运算,计算从数据寄存器S2开始的12个字节的ASCⅡ码数据的区块检查码(BCC),区块检查码(BCC)存储在数据寄存器的低按字节53、十六进制数据转换为AS CⅡ码指令格式:[F71 HEXA,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }54、AS CⅡ码转换为十六进制数据指令格式:[F72 AHEX,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }55、十六进制数据转换为AS CⅡ码指令格式:[F72 AHEX,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }56、BCD数据转换为AS CⅡ码指令格式:[F73 BCDA,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }56、AS CⅡ码转换为BCD数据指令格式:[F74 ABCD,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }57、16位数据转换为AS CⅡ码指令格式:[F75 BINA,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }58、AS CⅡ码转换为16位数据指令格式:[F76 ABIN,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }59、32位数据转换为AS CⅡ码指令格式:[F77 DBINA,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }60、AS CⅡ码转换为32位数据指令格式:[F78 DABIN,S1,S2,D]功能:S1:寄存器{WX,WY,WR,SV,EV,DT }S2:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX }61、16位二进制数据转换为4位BCD码指令格式:[F80 BCD,S,D]功能:S:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX ,IY }将S中的内容转换为4位BCD码62、4位BCD码转换为16位二进制数据指令格式:[F81 BIN,S,D]功能:S:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX ,IY }将S中的内容转换为16位二进制数据63、32位数据转换为8位BCD码指令格式:[F82 DBCD,S,D]功能:S:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX ,IY }将S中的内容转换为8位BCD码64、4位BCD码转换为32位二进制数据指令格式:[F83 DBIN,S,D]功能:S:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX ,IY }将S中的内容转换为32位二进制数据65、16位数据求反指令格式:[F84 INV,D]功能:D:寄存器{ WY,WR,SV,EV,DT,IX,IY }将D中的内容求反后存放到D中65、16位数据求补指令格式:[F85 NEG,D]功能:D:寄存器{ WY,WR,SV,EV,DT,IX,IY }将D中的内容求补后存放到D中66、32位数据求补指令格式:[F86 NEG,D]功能:D:寄存器{ WY,WR,SV,EV,DT,IX,IY }将D中的内容求补后存放到D中67、16位数据绝对值指令格式:[F87 ABS,D]功能:D:寄存器{ WY,WR,SV,EV,DT,IX,IY }将D中的内容求绝对值后存放到D中68、32位数据绝对值指令格式:[F88 DABS,D]功能:D:寄存器{ WY,WR,SV,EV,DT,IX,IY }将D中的内容求绝对值后存放到D中69、16位数据符号位扩展指令格式:[F89 EXT,D]功能:D:寄存器{ WY,WR,SV,EV,DT,IX }将D中的16位数据扩展为32位,存放在D和D+1中70、数据解码指令格式:[F90 DECO,S,n,D]功能:S:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}n:寄存器{WX,WY,WR,SV,EV,DT,IX,IY,K,H}D:寄存器{WY,WR,SV,EV,DT,IX ,IY }例:n=H302,3代表开始解码的数据位,2代表解码的位数。
西门子plc数据传送指令的功能和使用方法
西门子plc数据传送指令的功能和使用方法
数据传送指令用于各个编程元件之间进行数据传送,依据每次传送数据的多少可分为单个数据传送指令和块传送指令。
1)单个数据传送指令
单个数据传送指令每次传送一个数据,传送数据的类型分为字节传送、字传送、双字传送和实数传送。
(1)字节传送指令
字节传送指令又分为一般字节传送指令和马上字节传送指令。
MOVB:字节传送指令。
指令格式如下:
BIR:马上读字节传送指令。
指令格式如下:
BIW:马上写字节传送指令。
指令格式如下:
(2)字传送指令
MOVW:字传送指令。
指令格式如下:
(3)双字传送指令
MOVD:双字传送指令。
指令格式如下:
(4)实数传送指令
MOVR:实数传送指令。
指令格式如下:
2)块传送指令
块传送指令用来一次传送多个数据,最多可将255个数据组成一个数据块,数据块的类型可以是字节块、字块和双字块。
(1)字节块传送指令
BMB:字节块传送指令。
指令格式如下:
(2)字块传送指令
BMW:字块传送指令。
指令格式如下:
(3)双字块传送指令
BMD:双字块传送指令。
指令格式如下:。
欧姆龙mov指令的用法(二)

欧姆龙mov指令的用法(二)欧姆龙MOV指令的用法欧姆龙PLC(可编程逻辑控制器)是工业自动化领域常用的控制设备。
MOV(Move)指令是欧姆龙PLC中的一条重要指令,用于在不同的寄存器之间传输数据。
下面列举了一些常见的MOV指令用法,并对每个用法进行详细讲解。
1. 常数与寄存器之间传输数据MOV指令可以用于将一个常数值传输到指定的PLC寄存器中。
例如,将数值100传输到D寄存器D0中,可以使用以下指令:MOV D100 D0这条指令将常数100传输到D0寄存器中。
2. 寄存器与寄存器之间传输数据MOV指令还可以用于将一个寄存器的值传输到另一个寄存器中。
例如,将D0寄存器的值传输到D1寄存器中,可以使用以下指令:MOV D0 D1通过这条指令,D0寄存器的值将被传输到D1寄存器中。
3. 寄存器与位地址之间传输数据MOV指令还可以用于将一个寄存器的值传输到指定的位地址中。
例如,将D0寄存器的值传输到位地址X10中,可以使用以下指令:MOV D0 X10这条指令会将D0寄存器的值传输到X10位地址中。
4. 位地址与寄存器之间传输数据MOV指令还可以用于将一个位地址的值传输到指定的寄存器中。
例如,将位地址X10的值传输到D0寄存器中,可以使用以下指令:MOV X10 D0这条指令会将X10位地址的值传输到D0寄存器中。
5. 寄存器与IO地址之间传输数据MOV指令还可以用于将一个寄存器的值传输到指定的IO地址中。
例如,将D0寄存器的值传输到IO地址Y20中,可以使用以下指令:MOV D0 Y20这条指令会将D0寄存器的值传输到Y20 IO地址中。
6. IO地址与寄存器之间传输数据MOV指令还可以用于将一个IO地址的值传输到指定的寄存器中。
例如,将IO地址Y20的值传输到D0寄存器中,可以使用以下指令:MOV Y20 D0这条指令会将Y20 IO地址的值传输到D0寄存器中。
以上是欧姆龙MOV指令的一些常见用法和用例,通过合理灵活运用这些用法,可以实现PLC中数据的传输和处理,进而实现工业自动化系统的控制与调节。
PLC传送和比较指令的用法使用案例详细说明
PLC 传送和比较指令的用法使用案例详细说明
1、比较指令CMP
CMP 指令有三个操作数:两个源操作数[S1.]和[S2.],一个目标操作数[D.],该指令将[S1.]和[S2.]进行比较,结果送到[D.]中。
CMP 指令使用说明如图所示。
2、区间比较指令ZCP
ZCP 指令是将一个操作数[S.]与两个操作数[S1.]和[S2.]形成的区间比较,且[S1.]不得大于[S2.],结果送到[D.]中。
ZCP 指令使用说明如图所示。
3、传送指令MOV
MOV 指令将源操作数的数据传送到目标元件中,即[S.]→[D.]。
MOV 指令的使用说明如图所示。
当X0 为ON 时,源操作数[S.]中的数据K100 传送到目标元件D10 中。
当X0 为OFF,指令不执行,数据保持不变。
4、移位传送指令SMOV。
CP1H型PLC数据传送指令使用

PLC知识CP1H型PLC的指令非常丰富,达到几百条,目前指令功能号范围为000~891,丰富的指令使PLC具有更多的功能。
在前面的章节已介绍了一些指令的使用,本章再介绍余下的大部分指令。
由于本文介绍的指令很多,虽然讲解时力争通俗易懂,但在学习时也可能会枯燥无味,读者可先花少量时间粗略了解这些指令,待以后需要用到时再认真研读。
指令名称助记符功能号传送MOV021倍长传送MOVL498否定传送MVN022否定倍长传送MVNL499位传送MOVB082数字传送MOVDDomain:/低压配电柜Mo re:kflwwk 多位传送XFRB062块传送XFER070块设定BSET071数据交换XCHG073数据倍长交换XCGL562数据分配DIST080数据抽取COLL081变址寄存器设定MOVR560变址寄存器设定MOVRW可变程序控制器(PLC)是从早期的继电器逻辑控制系统发展而来的。
自20世纪60年代问世以来,PLC得到了突飞猛进的发展,尤其在数据处理、络通信及与DCS等集散系统融合方面有了很大的进展,可变程序控制器已经成为工业自动化强有力的工具,得到了广泛的普及和推广应用。
本文以四层教学仿真电梯系统为例,着重讲述可变程序控制器(PLC)与上位计算机工控组态软件组态王之间的通信。
2 SIMATIC S7-200系列PLC及其编程软件STEP 7-Micro/WIN 32SIMATIC 小型S7-200系列PLC适用于各行各业,各种场合中的检测、监测及控制的自动化。
S7-200系列的强大功能使其无论在独立运行中,或相连成络皆能实现复杂控制功能。
S7-200系列出色表现在以下几个方面:极高的可靠性;极丰富的指令集;易于掌握;便捷的操作;丰富的内置集成功能;实时特性;强劲的通讯能力;丰富的扩展模块等。
S7-200系列在集散自动化系统中充分发挥其强大功能。
使用范围可覆盖从替代继电器的简单控制到更复杂的自动化控制。
三菱plc常用的FNC指令

三菱plc常用的FNC指令一、程序流程控制指令——FNCO0~0900 CJ 条件转移01 CALL 子程序调用02 SRET 子程序返回03 IRET 中断返回04 EI 开中断05 DI 关中断06 FEND 主程序结束07 WDT 监控定时器刷新08 FOR 循环开始09 NEXT 循环结束二、传送、比较指令—FNC10~19 BIN----二进制BCD----十进制10 CMP 比较11 ZCP 区间比较12 MOV 传送13 SMOV BCD码移位传送14 CML 取反传送15 BMOV 数据块传送(n点→n点)16 FMOV 多点传送(1点→n点)17 XCH 数据交换,(DO)←→(D2)18 BCD BCD变换,BIN→BCD19 BIN BIN变换,BCD→BIN三、算术、逻辑运算指令—FNC20~29 BIN----二进制BCD----十进制20 ADD BIN加法21 SUB BIN减法22 MUL BIN乘法23 DIV BIN除法24 INC BIN加一25 BEC BIN减一26 WAND 字与27 WOR 字或28 WXOR 字异或29 NEG 求BIN补码四、循环、移位指令—FNC30~3930 ROR 循环右移31 ROL 循环左移32 RCR 带进位循环右移33 RCL 带进位循环左移34 SFTR 位右移35 SFTL 位左移36 WSFR 字右移37 WSFL 字左移38 SFWR FIFO写入39 SFRD FIFO 读出五、数据处理指令—FNC40~4940 ZRST 区间复位41 DECO 解码42 ENCO 编码43 SUM 求置ON位总数44 BON ON位判别45 MEAN 求平均值46 ANS 信号报警器标志置位47 ANR 信号报警器标志复位48 SQR BIN平方根49 FLT BIN整数→BIN浮点数六、高速处理指令——FNC50~5950 REF 输入输出刷新51 REFF 输入滤波时间常数调整52 MTR 矩阵输入53 HSCS 高速记数器比较置位54 HSCR 高速记数器比较复位55 HSZ 高速记数器区间比较56 SPD 速度检测57 PLSY 脉冲输出58 PWM 脉冲宽度调制59 PLSR 带加减速功能的脉冲输出七、方便指令—FNC60~6960 IST 状态初始化61 SER 数据搜索62 ABSD 绝对值凸轮顺控63 INCD 增量凸轮顺控64 TTMR 示教定时器65 STMR 专用定时器—可定义66 ALT 交替输出67 RAMP 斜坡输出68 ROTC 旋转工作台控制69 SORT 数据排序八、外部IO设备指令—FNC70~7970 TKY 10键输入71 HKY 16键输入72 DSw 拨码开关输入73 SEGD 七段译码74 SEGL 带锁存的七段码显示75 ARWS 方向开关76 ASC ASCII 码转换77 PR 打印输出78 FROM 读特殊功能模块79 TO 写特殊功能模块九、外围设备指令—FNC80~8980 RS RS-232C串行通讯81 PRUN 并行运行82 ASCI 十六进制→ASCII83 HEX ASCII→十六进制84 CCD 校验码85 VRRD 电位器读入86 VRSC 电位器设定88 PID PID控制十、F2外部模块指令—FNC90~9990 MNET F-16N,Mini网91 ANRD F2-6A,模拟量输入92 ANW* *2-6*,模拟量输出93 RMST F2-32RM,启动RM94 RMWR F2-32RM,写RM95 RMRD F2-32RM,读RM96 RMMN F2-32RM,监控RM97 BLK F2-30GM,指定块98 MCDE F2-30GM,机器码十一、浮点数运算指令—FNC110~132110 ECMP BIN浮点数比较111 EZCP BIN浮点数区间比较118 EBCD BIN浮点数→BCD浮点数119 EBIN BCD浮点数→BIN浮点数120 EADD BIN浮点数加法121 ESUB BIN浮点数减法122 EMUL BIN浮点数乘法123 EDIV BIN浮点数除法127 ESQR BIN浮点数开方129 INT BIN浮点数→BIN整数130 SIN BIN浮点数正弦函数(SIN)131 COS BIN浮点数余弦函数(COS)132 TAN BIN浮点数正切函数(TAN)十二、交换指令—FNC147147 SWAP 高低字节交换十三、定位指令—FNC155~159155 ABS 读当前绝对值位置156 ZRN 返回原点157 PLSY 变速脉冲输出158 DRVI 增量式单速位置控制159 DRVA 绝对式单速位置控制十四、时钟运算指令—FNC160~169160 TCMP 时钟数据比较161 TZCP 时钟数据区间比较162 TADD 时钟数据加法163 TSUB 时钟数据减法166 TRD 时钟数据读出167 TWR 时钟数据写入169 HOUR 小时定时器十五、变换指令—FNC170~177170 GRY 二进制数→格雷码171 GBIN 格雷码→二进制数176 RD3A 读FXon-3A模拟量模块177 WR3A 写FXon-3A模拟量模块十六、触点比较指令—FNC224~246224 LD= (S1)=(S2)时运算开始之触点接通225 LD> (S1)>(S2)时运算开始之触点接通226 LD< (Sl)<(S2)时运算开始之触点接通228 LD<> (S1)≠(S2)时运算开始之触点接通229 LD≤ (S1)≤(S2)时运算开始之触点接通230 LD≥ (S1)≥(S2)时运算开始之触点接通232 AND= (S1)=(S2)时串联触点接通233 AND> (S1)>(S2)时串联触点接通234 AND< (S1)<(S2)时串联触点接通236 AND<> (S1)≠(S2)时串联触点接通237 AND≤ (S1)≤(S2)时串联触点接通238 AND≥ (S1)≥(S2)时串联触点接通240 OR= (S1)=(S2)时并联触点接通241 OR> (S1)>(S2)时并联触点接通242 OR< (S1)<(S2)时并联触点接通244 OR<> (S1)≠(S2)时并联触点接通245 OR≤ (S1)≤(S2)时并联触点接通246 OR≥ (Sl)≥(S2)时并联触点接通。
plc中cop指令

PLC中COP指令1. 引言在自动化控制系统中,PLC(可编程逻辑控制器)被广泛应用于工业生产过程中的自动化控制。
COP指令是PLC中的一种重要指令,用于实现数据的复制和传输。
本文将详细介绍COP指令的定义、语法、应用场景和注意事项。
2. COP指令的定义COP指令(Copy)是PLC中的一种数据传输指令,用于将数据从一个存储区域复制到另一个存储区域。
该指令具有高效、精确的特点,可实现不同存储区域之间的数据传递,为工业自动化控制系统提供了重要的支持。
3. COP指令的语法COP指令的语法如下:COP(Source, Destination, Length);其中,Source表示源存储区域,Destination表示目标存储区域,Length表示要复制的数据长度。
通过指定不同的存储区域和数据长度,可以实现不同粒度的数据复制。
4. COP指令的应用场景4.1. 数据备份在工业生产过程中,数据的备份是非常重要的。
通过使用COP指令,可以将关键数据从一个存储区域复制到另一个存储区域,以实现数据的备份。
这样,在出现故障或数据丢失的情况下,可以及时恢复数据,保证生产过程的连续性和可靠性。
4.2. 数据传输在工业自动化控制系统中,不同的设备和模块之间需要进行数据传输。
通过使用COP指令,可以将数据从一个存储区域复制到另一个存储区域,实现设备之间的数据传输。
这样,不同设备之间可以实现数据共享和交互,提高生产效率和系统的整体性能。
4.3. 数据处理在PLC程序中,经常需要对数据进行处理和计算。
通过使用COP指令,可以将数据从一个存储区域复制到另一个存储区域,以实现数据的处理。
这样,可以方便地对数据进行加工、计算和分析,实现复杂的控制算法和逻辑。
4.4. 数据监测在工业生产过程中,需要对关键数据进行实时监测和分析。
通过使用COP指令,可以将数据从一个存储区域复制到另一个存储区域,以实现数据的监测。
这样,可以及时获取和分析数据,发现潜在问题,并采取相应的措施,保证生产过程的稳定性和安全性。
lg plc bsftp指令

lg plc bsftp指令BSFTP(Batch SFTP)是LG PLC的指令之一,用于在PLC(可编程逻辑控制器)中进行SFTP(安全文件传输协议)通信。
本文将一步一步回答关于BSFTP指令的问题,包括如何配置SFTP连接、执行文件传输等操作,并对BSFTP指令的优势进行讨论。
第一步:配置SFTP连接首先,需要在LG PLC的程序中配置SFTP连接。
在PLC的程序编辑软件(如XG5000)中打开程序编辑界面,选择需要配置SFTP连接的PLC模块。
在该模块下,可以找到BSFTP指令相关的参数设置。
1. SFTP服务器地址:输入SFTP服务器的IP地址或域名。
2. SFTP服务器端口:输入SFTP服务器端口号,默认为22。
如果需要使用非标准端口号,可以在此处进行更改。
3. 用户名和密码:输入连接SFTP服务器所需的用户名和密码。
根据具体的SFTP服务器配置,可能会需要其他身份验证信息。
4. 文件传输类型:选择是下载(Get)文件还是上传(Put)文件。
5. 本地文件路径:输入本地文件的路径,如果是下载文件,则是文件保存的路径;如果是上传文件,则是要上传的文件的路径。
6. 远程文件路径:输入SFTP服务器上文件的路径,如果是下载文件,则是要下载的文件在服务器上的路径;如果是上传文件,则是文件在服务器上保存的路径。
7. 文件名:输入要下载或上传的文件的文件名。
第二步:执行文件传输配置完SFTP连接后,可以使用BSFTP指令执行文件传输操作。
在PLC 的程序中,找到需要执行文件传输操作的部分,在该部分内添加BSFTP 指令。
BSFTP指令有两个执行选项:1. Single Execution:单次执行选项。
使用此选项将只执行一次文件传输操作。
指定文件传输的方向(下载或上传)、本地文件路径、远程文件路径和文件名。
2. Program Execution:程序执行选项。
使用此选项将根据程序的执行顺序,重复执行文件传输操作。
欧姆龙plcxfer指令用法

欧姆龙plcxfer指令用法欧姆龙PLC XFER指令用法欧姆龙PLC XFER指令是一种非常重要的指令,它可以实现PLC之间的数据传输。
在工业自动化领域,PLC之间的数据传输是非常常见的,因此掌握XFER指令的用法对于工程师来说是非常重要的。
一、XFER指令的基本语法XFER指令的基本语法如下:XFER DXXX DXXX YYY其中,DXXX表示源地址,YYY表示目标地址。
这个指令的作用是将源地址的数据传输到目标地址中。
二、XFER指令的应用场景XFER指令的应用场景非常广泛,下面我们来介绍一些常见的应用场景。
1. 数据传输在工业自动化领域,PLC之间的数据传输是非常常见的。
例如,在一个生产线上,有多个PLC控制器,它们需要相互传输数据,以实现生产线的协调运行。
这时,就可以使用XFER指令来实现数据传输。
2. 数据备份在PLC控制系统中,数据备份是非常重要的。
如果PLC控制器出现故障,备份数据可以帮助工程师快速恢复系统。
XFER指令可以用来实现数据备份,将数据从一个PLC控制器传输到另一个PLC控制器中。
3. 数据共享在一个大型的工业自动化系统中,可能会有多个PLC控制器,它们需要共享数据。
这时,可以使用XFER指令来实现数据共享。
例如,在一个生产线上,有多个PLC控制器,它们需要共享生产线的状态信息,以便协调运行。
这时,就可以使用XFER指令来实现数据共享。
三、XFER指令的注意事项在使用XFER指令时,需要注意以下几点:1. 源地址和目标地址的数据类型必须相同。
2. 源地址和目标地址的数据长度必须相同。
3. 在进行数据传输时,需要保证源地址和目标地址的数据是有效的。
4. 在进行数据传输时,需要保证源地址和目标地址的数据是同步的。
四、总结XFER指令是一种非常重要的指令,它可以实现PLC之间的数据传输。
在工业自动化领域,PLC之间的数据传输是非常常见的,因此掌握XFER指令的用法对于工程师来说是非常重要的。
1200plc trcv指令

1200plc trcv指令PLC(可编程逻辑控制器)是一种用于自动化控制的电子设备,广泛应用于工业自动化领域。
在PLC编程中,TRCV指令是常用的指令之一,用于实现数据的传输和接收。
本文将详细介绍PLC TRCV 指令的功能和使用方法。
PLC TRCV指令用于在PLC之间进行数据的传输和接收。
它可以实现不同PLC之间的数据交换,方便不同设备之间的协作和通信。
TRCV指令可以将数据发送到指定的PLC,并接收来自其他PLC的数据。
这种数据交换可以实现设备之间的实时通信,提高生产效率和灵活性。
TRCV指令的语法格式如下:TRCV PLC1, PLC2, VAR1, VAR2其中,PLC1和PLC2是指定的PLC设备,VAR1和VAR2是数据传输的变量。
PLC1将VAR1的数据发送给PLC2,并同时接收来自PLC2的VAR2数据。
在使用TRCV指令时,需要注意以下几点。
首先,PLC1和PLC2之间需要建立通信连接,确保能够正常传输数据。
其次,VAR1和VAR2的数据类型需要一致,否则数据传输可能会出错。
另外,TRCV指令是一条阻塞指令,即在进行数据传输和接收时,程序会暂停执行直到传输完成。
为了更好地理解TRCV指令的使用,下面将通过一个实际的例子进行说明。
假设有两个PLC设备,分别为PLC1和PLC2,需要实现PLC1向PLC2发送温度数据,并接收PLC2发送的湿度数据。
首先,在PLC1中定义一个温度变量TEMP,用于存储温度数据。
然后,在PLC2中定义一个湿度变量HUMIDITY,用于存储湿度数据。
在PLC1的程序中,使用TRCV指令将TEMP发送给PLC2,并接收PLC2发送的HUMIDITY。
具体的代码如下:TRCV PLC1, PLC2, TEMP, HUMIDITY在PLC2的程序中,使用TRCV指令接收来自PLC1的TEMP,并发送HUMIDITY给PLC1。
具体的代码如下:TRCV PLC2, PLC1, HUMIDITY, TEMP通过以上的程序设置,PLC1和PLC2之间就可以实现温度和湿度数据的交换。
plc的mov指令的用法

plc的mov指令的用法
PLC的MOV指令是输出指令,用于将源操作数复制到目的单元。
源操作数保持不变。
当驱动条件X0成立时,PLC将源址S中的数据传送到终址D中,此时S的内容不变,而D的内容变得和S一样。
MOV指令可以通过组合位元件的形式对各种位元件进行清零和置位,或者对各种字元件进行读写操作。
例如,MOV K15 K2Y0后,将K15用二进制数表示,并控制Y0~Y7的状态。
此时Y0~Y3的状态变为1(ON),Y4~Y7的状态变为0(OFF)。
再如MOV D10 D20,将D10的内容传送到D20中,若D10的内容为(H98),则执行该指令后D20的内容也变为(H98)。
此外,MOV指令更多的应用,还是要结合实际的案例分析才能深刻体会,本身该该指令的理解也不难,所以,在这里不再过多阐述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在不改变原值的情况下将IN中的值传送到OUT 有字节、字、双字和实数传送指令 MOVB MOVW MOVD MOVR IN,OUT IN,OUT IN,OUT IN,OUT
字节立即传输指令
允许在物理I/O和存储器之间立即传送一个字 节数据。 字节立即读指令(BIR)读物理输入IN,并将 结果存入OUT中,但过程映象寄存器并不刷新。 字节立即写指令(BIW)从存储器IN读取数据, 写入物理输出OUT,同时刷新相应的输出过程 映象区。
指令格式Biblioteka LAD:STL: BIR IN,OUT BIW IN,OUT
块传输指令
传送指定数量的数据 到一个新的存储区,数据 的起始地址IN,数据长度 为N个字节、字或者双字, 新块的起始地址为OUT。 STL: BMB IN,OUT,N BMW IN,OUT,N BMD IN,OUT,N