智能控制作业
智能控制技术第二章作业

求:
(1)误差为零和误差为正小的隶属度函数
(2)误差为零或误差为正小的隶属度函数
解
定义2-4并:并 的隶属函数 对所有 被逐点定义为取大运算,即 ,式中,符号“∨”为取极大值运算。
定义2-5交:交 的隶属函数 对所有 被逐点4已知模糊矩阵P、Q、R、S为
求:
(1)
(2)
(3)
解
定义2-14模糊关系合成:如果R和S分别为笛卡尔空间 和 上的模糊关系,则R和S的合成是定义在笛卡尔空间 上的模糊关系,并记作 ,其隶属度函数的计算方法
上确界(Sup)算子
(1)
(2)
2-6设有论域 , ,并定义
试确定模糊条件语言“如果x轻,则y重,否则y不非常重”所决定的模糊关系矩阵R,并计算出当x为非常轻,重条件下所对应的模糊集合y。
(不做)
解:B′=非常重=
B″=不非常重=B =
关系矩阵R=(A×B)U
A×B=
智能控制第三章作业2
1、已知某一炉温控制系统,要求温度保持在amath`600^{o} `endmathC 恒定。
针对该控制系统有以下控制经验:
(1)若炉温低于amath`600^{o} `endmathC ,则升压;低得越多升压越高。
(2)若炉温高于amath`600^{o} `endmathC ,则降压;高得越多降压越低。
(3)若炉温等于amath`600^{o} `endmathC ,则保持电压不变。
设模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。
输入、输出变量的量化等级为7级,取5个模糊集。
试设计隶属度函数误差变化划分表、控制电压变化划分表和模糊控制规则表。
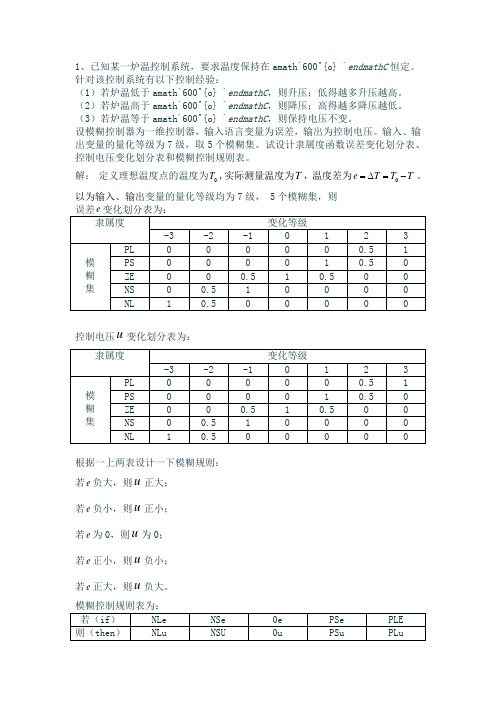
解: 定义理想温度点的温度为0T ,实际测量温度为T ,温度差为0e T T T =∆=-。
以为输入、输出变量的量化等级均为7级, 5个模糊集,则
控制电压u 变化划分表为:
根据一上两表设计一下模糊规则: 若e 负大,则u 正大; 若e 负小,则u 正小; 若e 为0,则u 为0; 若e 正小,则u 负小; 若e 正大,则u 负大。
2、已知被控对象为amath`G(s)=\frac{1}{10s+1}e^{-0.5s} `endmath。
假设系统给定为阶跃值r=30,采样时间为0.5s,系统初始值r(0)=0,试分别设计:(1)常规的PID控制器;
(2)常规的模糊控制器;
(3)模糊PID控制器。
分别对上述3种控制器进行Matlab仿真,并比较控制效果。
暂未解出。
智能控制作业
1、已知某一炉温控制系统,要求温度保持在600度恒定。
针对该控制系统有以下控制经验:(1)若炉温低于600度,则升压;低的越多升压越高。
(2)若炉温高于600度,则降压;高的越多降压越低。
(3)若炉温等于600度,则保持电压不变。
设模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。
输入、输出变量的量化等级为7级,取5个模糊集。
试设计隶属度函数误差变化划分表、控制电压变化划分表和模糊控制规则表。
解:1)确定变量定义理想温度为600℃,实际温度为T,则温度误差为E=600-T。
将温度误差E作为输入变量2)输入量和输出量的模糊化将偏差E分为5个模糊集:NB、NS、ZO、PS、PB,分别为负小、负大、零、正小、正大。
将偏差E的变化分为7个等级:-3 -2 -1 0 1 2 3,从而得到温度模糊表如表1所示。
表1 温度变化E划分表控制电压u也分为5个模糊集:NB、NS、ZO、PS、PB,分别为负小、负大、零、正小、正大。
将电压u的变化分为7个等级:-3 -2 -1 0 1 2 3,从而得到电压变化模糊表如表2所示。
表2 电压变化u划分表表3 模糊控制规则表E PB PS ZO NS NB u PB PS ZO NS NB2、利用MATLAB,为下列两个系统设计模糊控制器使其稳态误差为零,超调量不大于1%,输出上升时间≤0.3s 。
假定被控对象的传递函数分别为:255.01)1()(+=-s e s G s)456.864.1)(5.0(228.4)(22+++=s s s s G解:在matlab 窗口命令中键入fuzzy ,得到如下键面:设e 的论域范围为[-1 1],de 的论域范围为[-0.1 0.1],u 的论域范围为[0 2]。
将e 分为8个模糊集,分别为NB ,NM, NS, NZ, PZ, PS, PM, PB; de 分为7个模糊集,分别为NB ,NM ,NS, Z ,PS ,PM ,PB;u分为7个模糊集,分别为NB ,NM ,NS, Z ,PS ,PM ,PB; MATLAB中的设置界面如下:模糊规则的确定:模糊控制器的输出量在simulink中调用模糊控制器,观察输出结果运行结果为ScopeScope1 Scope23、利用去模糊化策略,分别求出模糊集A 的值。
智能控制作业

智能控制作业一、已知某一炉温控制系统,要求温度保持在600℃恒定。
针对该控制系统有以下控制经验:①若炉温低于600 ℃,则升压;低得越多升压越高。
②若炉温高于600 ℃,则降压;高得越多降压越低。
③若炉温等于600 ℃,则保持电压不变。
设计模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。
输入、输出变量的量化等级为7级,取5个模糊集。
试设计隶属度函数误差变化划分表、控制电压变化划分表和模糊控制规则表。
要求有程序及注释,仿真结果和分析。
(1)确定模糊控制器的输入输出变量将600℃作为给定值t0 ,测量炉温为t(k),则:输入变量:e(k)= t(k)-t0输出变量:触发电压u 的变化量,该u直接控制供电电压的高低。
(2)输入输出变量的模糊语言描述输入输出变量的语言值:{负大(NB),负小(NS),零(ZE),正小(PS),正大(PB)} 设:e的论域为X,u 的论域为Y,均量化为七个等级:X= {-3,-2,-1,0,1,2,3},Y={-3,-2,-1,0,1,2,3}语言变量E 和U 的隶属函数赋值表(论域离散):(3)模糊控制规则①if E =NB then U =PB②if E =NS then U =PS③if E =ZE then U =ZE④if E =PS then U =NS⑤if E =PB then U =NB(4)求模糊控制表(5)控制量转化为精确量:采用加权平均法:(6)计算模糊关系R=(NBe×PBu)+ (NSe×PSu)+(ZEe×ZEu)+(PSe×NSu) +(PBe×NBu)ZEe×ZEu =(0, 0, 0.5,1, 0.5,0,0)×(0,0 , 0.5, 1 , 0.5 , 0,0)分别计算出矩阵NBe×PBu,NSe×PSu,ZEe×ZEu,PSe×NSu ,PBe×NBu求并集得:查询表:实际控制时,将测量到的误差量化后,从查询表中得到控制量再乘以比例因子Kn,即作为控制的实际输出。
智能控制题目及解答

智能控制题目及解答 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT智能控制题目及解答第一章绪论作业作业内容1.什么是智能、智能系统、智能控制2.智能控制系统有哪几种类型,各自的特点是什么3.比较智能控制与传统控制的特点。
4.把智能控制看作是AI(人工智能)、OR(运筹学)、AC(自动控制)和IT(信息论)的交集,其根据和内涵是什么5.智能控制有哪些应用领域试举出一个应用实例,并说明其工作原理和控制性能。
1 答:智能:能够自主的或者交互的执行通常与人类智能有关的智能行为,如判断、推理、证明、识别、感知、理解、通信、设计、思考、规划、学习等一系列活动的能力,即像人类那样工作和思维。
智能系统:是指具有一定智能行为的系统,对于一定的输入,它能产生合适的问题求解相应。
智能控制:智能控制是控制理论、计算机科学、心理学、生物学和运筹学等多方面综合而成的交叉学科,它具有模仿人进行诸如规划、学习、逻辑推理和自适应的能力。
是将传统的控制理论与神经网络、模糊逻辑、人工智能和遗传算法等实现手段融合而成的一种新的控制方法。
2 答:(1)人作为控制器的控制系统:人作为控制器的控制系统具有自学习、自适应和自组织的功能。
(2)人-机结合作为作为控制器的控制系统:机器完成需要连续进行的并需快速计算的常规控制任务,人则完成任务分配、决策、监控等任务。
(3)无人参与的自组控制系统:为多层的智能控制系统,需要完成问题求解和规划、环境建模、传感器信息分析和低层的反馈控制任务。
3 答:在应用领域方面,传统控制着重解决不太复杂的过程控制和大系统的控制问题;而智能控制主要解决高度非线性、不确定性和复杂系统控制问题。
在理论方法上,传统控制理论通常采用定量方法进行处理,而智能控制系统大多采用符号加工的方法;传统控制通常捕获精确知识来满足控制指标,而智能控制通常是学习积累非精确知识;传统控制通常是用数学模型来描述系统,而智能控制系统则是通过经验、规则用符号来描述系统。
智能控制技术作业

智能控制技术作业1、什么是智能、智能系统、智能控制?(1)将感觉、去记、回忆、思维、语言、行为的整个过程称为智能(2)由感知、规划、执行子系统组成,具有认知、概念与推理、记忆与学习完成适应性、通用性功能的反馈控制系统称为智能系统。
(3)通过认知、记忆、学习、推理、协作等智能要素与技术手段,实现复杂系统的适应性与通用性功能的反馈控制称为智能控制。
2、智能控制系统有哪几种形式?模糊控制、神经控制、行为控制、自适应控制等。
3、比较智能控制与传统控制的特点?古典控制特点:(1)依赖于控制对象精确模型;(2)对控制对象的有用信息(信息源/人的语言知识、系统输入输出数据、系统评价结果等)没有充分利用;(3)控制方法依赖于系统模型的结构与参数,没有固定的设计程式,通用性不强,限制了工程应用;(4)对非线性、强耦合系统,非模型系统、无模型系统难以适应;智能控制特点:(1)适用于非线性、强耦合的系统;(2)适用于无模型(只有系统数据)系统;(3)适用于非模型(可以是模糊语言模型、行为模型等)系统;(4)能够应用多种信息,包括语言、样本等。
(5)具有较强的适应性;(6)具有较固定的设计程式4、比较模糊集合与普通集合的异同,模糊性与随机性的不同。
经典集合:一个范围内所有对象的整体;集合自身不能作为其内的元素模糊集合:设A是集合X到[0,1]的一个映射,A:X→[0,1],x→A(x) 则称A 是X上的模糊集,A(x)称为模糊集A的隶属函数,或称A(x)为x对模糊集A的隶属度。
模糊性与随机性区别:(1)随机性表示未发生的事件可能发生的可能性(概率)。
(2)模糊性表示已发生/未发生事件、属性量的程度(大小);(3)随机性由事物自身及环境运动规律决定;(4)模糊性由事物自身及环境运动规律、人的认知程度共同决定;5、简述模糊控制系统的工作原理。
人的经验是一系列含有语言变量值的条件语句和规则,而模糊集合理论能十分恰当地表达具有模糊性的语言变量和条件语句。
智能控制-考核大作业+设计(10)

《智能控制》大作业姓名:徐东班级:自动化103 学号:31002013341、简答题:1.1.根据目前智能控制系统的研究和发展,智能控制系统主要有哪些方面的工作可做进一步的探索和开展?答:1)智能控制的基础理论和方法研究。
2)智能控制系统结构研究。
3)基于知识系统及专家控制。
4)基于模糊系统的智能控制。
5)基于学习及适应性的智能控制。
6)基于神经网络的智能控制系统。
7)基于信息论和进化论的学习控制器研究。
8)其他,如计算机智能集成制造系统、智能计算系统、智能并行控制、智能容错控制、智能机器人等。
1.2.画出模糊控制系统的基本结构图,并简述模糊控制器各组成部分所表示的意思?答:模糊化接口:通过在控制器的输入、输出论域上定义语言变量,来将精确的输入、输出值转换为模糊的语言值。
模糊推理:根据控制规则中蕴涵的输入、输出模糊关系和实际输入的模糊取值,通过模糊推理,得到输出的模糊状态。
规则库:规则库由若干条控制规则组成,这些控制规则根据人类控制专家额经验总结得出,按照IF…is…and…is…THEN…is…的形式表达。
清晰化接口:通过清晰化的方法把由模糊推理得到的模糊输出值转化成精确控制值暑假给对象。
1.3.画出感知器的基本结构模型,并简述其算法过程。
答:x1x2``xn23)计算实际输出4)修正权W5)转到2)直到W 对一切样本均稳定不变或稳定在一个精度范围为止。
1.4.画出三层BP 神经网络的基本结构图,并试写出各层之间的输入输出函数关系?第1层(输入层):(1)(1)i i i Out In x == i=1,2,…,n 第2层(隐层):(2)(1)(1)(2)(2)1,()njij i j j j i Inw Out Out In θφ==-=∑ j=1,2,…,l第3层(输出层): (2)(1)11()l nk jk ij i j j i y w w x φθ===-∑∑1.5.神经网络系统具有哪些基本特性,以及神经网络在控制系统中具有哪些作用?答:神经系统具有的基本特性:1)非线性映射逼近能力。
自动化概论作业——智能控制
自动化概论作业—智能控制智能控制基本概念智能控制的定义一: 智能控制是由智能机器自主地实现其目标的过程.而智能机器则定义为,在结构化或非结构化的,熟悉的或陌生的环境中,自主地或与人交互地执行人类规定的任务的一种机器.定义二: K.J.奥斯托罗姆则认为,把人类具有的直觉推理和试凑法等智能加以形式化或机器模拟,并用于控制系统的分析与设计中,以期在一定程度上实现控制系统的智能化,这就是智能控制.他还认为自调节控制,自适应控制就是智能控制的低级体现.定义三: 智能控制是一类无需人的干预就能够自主地驱动智能机器实现其目标的自动控制,也是用计算机模拟人类智能的一个重要领域.定义四: 智能控制实际只是研究与模拟人类智能活动及其控制与信息传递过程的规律,研制具有仿人智能的工程控制与信息处理系统的一个新兴分支学科。
智能控制的特点同时具有以知识表示的非数学广义模型和以数学模型表示的混合过程,也往往是那些含有复杂性,不完全性,模糊性或不确定性以及不存在已知算法的非数学过程,并以知识进行推理,以启发引导求解过程;智能控制的核心在高层控制,即组织级;智能控制器具有非线性特性;智能控制具有变结构特点;智能控制器具有总体自寻优特性;智能控制系统应能满足多样性目标的高性能要求;智能控制是一门边缘交叉学科;智能控制是一个新兴的研究领域。
智能控制的主要技术方法智能控制是以控制理论、计算机科学、人工智能、运筹学等学科为基础,扩展了相关的理论和技术,其中应用较多的有模糊逻辑、神经网络、专家系统、遗传算法等理论和自适应控制、自组织控制、自学习控制等技术。
专家系统专家系统是利用专家知识对专门的或困难的问题进行描述. 用专家系统所构成的专家控制,无论是专家控制系统还是专家控制器,其相对工程费用较高,而且还涉及自动地获取知识困难、无自学能力、知识面太窄等问题. 尽管专家系统在解决复杂的高级推理中获得较为成功的应用,但是专家控制的实际应用相对还是比较少。
智能控制作业

一.全自动洗衣机的模糊控制分析摘要: 对全自动洗衣机的模糊控制进行了分析,详细介绍了如何定义洗衣机的模糊控制输入、输出量.根据专家知识和手动操作人员长期积累的经验,给出了模糊控制的具体规则.以确定洗衣机洗涤时间为例,利用Matlab进行了仿真研究,采用取小运算对模糊规则进行推理,并采用最大平均法得到反模糊化结果,所得结果与理论计算结果接近相同.关键词: 全自动洗衣机; 模糊控制; 模糊推理1.全自动洗衣机的一般模糊控制原理1. 1模糊控制输入量模糊控制输入量是模糊推理的前件,对于全自动洗衣机模糊控制器而言,主要有衣质、衣量、脏污程度和脏污性质4个输入量.这4个输入量的模糊子集隶属函可定义为:衣质,论域的语言值定义为棉、棉纤、纤3 种; 衣量,论域的语言值定义为多、中多、中少、少4种; 脏污程度,论域的语言值定义为很脏、一般脏不太脏3 种; 脏污性质,论域的语言值定义为油性、中性和泥性3种1. 2模糊控制的输出量模糊控制的输出是模糊推理的后件, 对于全自动洗衣机模糊控制器而言, 主要包括水位、洗涤时间、洗涤剂投放量和水流强度4个量.这4个输出量的模糊子集隶属函数可定义为:洗涤剂投放量,论域的语言值定义为很少、少、中、多和很多5种;洗涤时间,论域的语言值定义为很短、短、中、长、很长5种;水位高低, 论域的语言值定义为很低、低、高、很高4种;水流强度,论域的语言值定义为弱、中和强3种.1. 3模糊控制规则模糊控制器的规则库是基于专家知识和手动操作人员长期积累的经验, 是按人的直觉推理的一种语言表示形式. 通常有一系列的关系词连接而成, 如IF-THEN, ELSE 等. 为了简明表示模糊规则,将上述模糊控制输出量用数字表示. 例如: 洗涤时间(很短、短、中、长、很长) = ( 1、2、3、4、5), 其余3个输出量表示与此类似, 当输出量论域为3 种时,则用3个数字表示. 根据专家的经验并结合衣物的实际洗涤情况, 可得到表1所示的模糊控制规则.表1,全自动洗衣机模糊控制规则衣物很脏一般脏不太脏衣质衣量油污泥污油污泥污油污泥污棉多 4 553 4 553 4 353 4 353 4 343 4 343中多 3 553 3 453 3 342 3 332 3 232 3 232中少 2 453 2 342 2 342 2 342 2 232 2 122少 1 342 1 232 1 232 1 222 1 111 1 111棉纤多 4 553 4 453 4 353 4 343 4 342 4 242中多 3 553 3 453 3 442 3 342 3 232 3 232中少 2 442 2 342 2 332 2 232 2 221 2 111少 1 332 1 232 1 221 1 221 1 111 1 111纤多 4 553 4 553 4 442 4 342 4 332 4 232中多 3 552 3 442 3 432 3 332 3 232 3 222中少 2 442 2 332 2 332 2 222 2 211 2 111少 1 331 1 231 1 221 1 221 1 111 1 111表1中每一项有4位数字,从左到右依次代表水位、洗涤剂投放量、冼涤时间、水流方式4 个输出变量,每位数的取值代表相应的输出所取的模糊子集.参考文献:[ 1] 经顺林, 潘皓炫, 肖健华. 全自动洗衣机的自适应模糊控制方法[ J] . 计算机技术与自动化1999, 18( 4): 13- 17.[ 2] 彭小娟. 智能洗衣机的模糊控制系统[ J] . 新余高专学报, 2001, 6( 2) : 17- 18.[ 3] 冯海涛. 智能模糊技术在全自动洗衣机中的应用[ J]. 家用电器, 2002( 6): 30- 31.[ 4] 张道德, 杨光友, 周国柱, 等. 工业洗衣机模糊控制的设计[ J]. 微计算机信息, 2005, 21( 7): 37- 39二.全自动洗衣机的自适应模糊控制方法摘要本文分析了模糊控制技术在全自动洗衣机的应用及其不足,提出了一种可行的自适应模糊控制法,应用该方法可使全自动洗衣机在保证洗涤质量的前提下,降低生产成本。
东北林业大学机电工程学院智能控制大作业1
智能控制导论大作业机电工程学院电气工程及其自动化二班**2010****智能控制大作业:神经网络系统设计:非线性时变对象y(k)=a(1−be −ctT)y(k−1)1+y2(k−1)+ u(k)的RBF神经网络得到PID控制。
该仿真情况如图a为系统仿真结构图。
图(a)系统仿真结构图(1)输入为多阶梯信号,在时间[0,0.2,0.3,0.5,0.7,0.8,1,1.2]对应的阶跃幅值为[0.7,-0.8,0.9,-1,1,0.7,-0.7,0.5],如图d所示:图(d)系统输入输出变化曲线在此图中,还有系统输出跟踪给定输入的响应。
多阶梯输入信号的S函数为:%多阶梯给定输入信号function[sys,x0,str,ts]=multi_step(t,x,u,flag,tTime,yStep)switch flag,case 0 %调用初始化过程[sysm,x0,str,ts]=mdlInitializeSizes;case 3 %计算输出信号,生成多阶跃信号sys=mdlOutputs(t,tTime,yStep);case{1,2,4,9} %未使用flag值sys=[];otherwise %错误信息处理error([‘Unhandled flag=’,num2str(flag)];end;%when flag=0时,进行初始化处理function[sys,x0,str,ts]=mdlIntializeSizessizes=simsizes; %调入初始化的模板sizes.NumContStates=0;sizes.NumDiscStates=0; %无连续、离散状态sizes.NumOutputs=1;sizes.NumInputs=0; %系统的输入和输出路数sizes.DirFeedthrough=0; %输入信号不直接传输到输出sizes.NumSampleTimes=1; %单个采样周期sys=simsizes(sizes); %初始化x0=[];str=[]; %系统的初始状态为空向量ts=[0,0]; %假设模块为连续模块% flag=3时,计算输出信号function sys=mdlOutputs(t,tTime,yStep)(2)神经网络的结构为3-6-1,即输入层3个节点,隐层6个节点,输出层1个节点。
安徽工程大学智能控制大作业

《智能控制》大作业姓名:王阵伟班级:自动化学号:310210510621011、简答题:1.1.根据目前智能控制系统的研究和发展,智能控制系统主要有哪些方面的工作可做进一步的探索和开展?目前研究方向内容: 1 智控的基础理论和方法研究 2 智控的系统结构研究 3 基于知识系统及专家控制 4 基于模糊系统的智能控制 5 基于学习及适应性的智控 6 基于神经网络的智控7 基于信息论和进化论的学习控制器研究8 其他,如计算机智能集成制造系统,智能计算系统,智能并行系统,智能容错控制,智能机器人等。
需要探索的方面: 1 开展智控理论与应用的研究2 充分运用神经生理学心理学认知科学和人工智能等学科的基本理论,深入研究人类解决问题时表现出来的经验技巧策略,建立切实可行的智控体系结构; 3 把现有的知识工程模糊系统信息论进化论神经网络理论和技术与传统的控制理论相结合,充分利用现有的控制理论,研究适合于当前计算机资源条件的智控策略和系统;4 研究人-机交互式的智控系统和学习系统以不断提高智控系统的智能水平; 5 研究适合智控系统的并行处理机信号处理器智能传感器和智能开发工具软件,以解决智控系统在实际应用中存在的问题,使智控得道更广泛应用。
1.2.画出模糊控制系统的基本结构图,并简述模糊控制器各组成部分所表示的意模糊控制器主要由模糊化接口、规则库、模糊推理、清晰化接口四部分组成,各部分的作用概述如下。
1.模糊化接口模糊化是通过在控制器的输入、输出论域上定义语言变量,来将精确的输入、输出值转换为模糊的语言值。
它的作用是将真实的确定量输入转换为一个模糊量。
把物理量的清晰制转换成模糊语言变量的过程叫做清晰量的模糊化2.规则库模糊控制器的规则是基于专家知识活手动操作人员长期积累的经验,他是按人的直觉推理的一种语言表达形式。
模糊规则通常有一系列的关键词连接而成,如if-then、else、also、end等,关系词必须经过“翻译”才能将模糊规则数值化。
(完整版)西南大学1085《智能控制》作业答案

西南大学网络与继续教育学院1085 《智能控制》作业答案1、下列有关推理机说法不正确的是()A. 推理机是用于对知识库中的知识进行推理来得到结论的“思维”机构。
B. 推理机包括三种推理方式,即正向推理、反向推理和双向推理。
C. 推理机和知识库构成了专家系统D. 推理机是指专家系统中无需任何知识就能完成推理功能的组成部分。
答:d2、下列不属于知识库所包含的是()A. 基于专家经验的判断性规则。
B. 用于推理、问题求解的控制性规则。
C. 用于说明问题的状态、事实和概念以及当前的条件和常识等的数据。
D. 所涉及的领域广泛、普遍的常识和数据。
答:d3、下列不属于智能控制的特点的是()A. 自组织功能和优化能力B. 完全具有人的智能C. 学习功能D. 适应功能答:b4、下列有关智能控制的组成正确的是()A. 智能控制由人工智能,自动控制,运筹学组成。
B. 智能控制由人工智能和自动控制组成C. 智能控制由自动控制和运筹学组成D. 智能控制由运筹学和人工智能组成答:a5、下列有关智能控制的概念说法准确的是()A. 所谓智能控制,即设计一个控制器(或系统),使之具有学习、抽象、推理、决策等功能,并能根据环境(包括被控对象或被控过程)信息的变化作出适应性反应,从而实现由人来完成的任务。
B. 所谓智能控制,就是将控制系统进行智能化,使之完全具有人的智能。
C. 所谓智能控制,就是控制过程中,就是人参与控制,从而具有人的智能。
D. 所谓智能控制,就是所设计的控制系统具有很高的智能。
答:a6、下列哪位人物提出模糊集合理论,奠定了模糊控制的基础()A. 美国加州大学自动控制系的L.A.ZedehB. 伦敦大学的Mamdani博士C. 美国的J.H.Holland教授D. 著名的Hopfield教授答:a7、下列不是决定神经网络性能的要素是()A. 神经元(信息处理单元)的特性。
B. 神经元之间相互连接的形式——拓扑结构。
C. 为适应环境而改善性能的学习规则。
17秋北理工《智能控制基础》在线作业
1. 解决自动控制面临问题的一条有效途径就是把人工智能等技术用于自动控制系统,其核心是()A. 控制算法B. 控制结构C. 控制器智能化D. 控制系统仿真正确答案:C 满分:2 分2. 一种值得研究的新型智能控制是()A. 机器人控制B. 反馈控制C. 进化控制D. 在线控制正确答案:C 满分:2 分3. 成为“专家控制先行者”的科学家是()A. P.H.WinstonB. N.J.NilssonC. K.J.AstromD. E.A.Feigenbaum正确答案:D 满分:2 分4. 最早提出人工神经网络思想的学者是()A. McCulloch-PittsB. HebbC. Widrow-HoffD. Rosenblatt正确答案:A 满分:2 分5. 递阶控制系统的结构是根据下列原理设计的()A. 精度随智能降低而提高B. 精度随智能提高而提高C. 精度随智能降低而降低D. 精度与智能无关正确答案:A 满分:2 分6. 建立专家系统最艰难的任务是()A. 知识表示B. 知识应用C. 知识推理D. 知识获取正确答案:A 满分:2 分7. 被称为“智能控制先驱”的科学家是()A. G-N-SaridisB. K-S-FuC. K-J-AstromD. N-Wiener正确答案:B 满分:2 分8. 智能控制成为国际上独立新学科的时间为20世纪()A. 60年代B. 70年代C. 80年代D. 90年代正确答案:C 满分:2 分9. 智能控制的“四元交集结构”的四元,指的是()A. 计算机科学、自动控制、人工智能、神经网络B. 人工智能、自动控制、信息论、系统论C. 人工智能、自动控制、信息论、机器学习D. 自动控制、人工智能、信息论、运筹学正确答案:D 满分:2 分10. 增强学习属于()A. 自主学习B. 有师学习C. 主动学习D. 无师学习正确答案:B 满分:2 分11. 基于模式识别的控制系统属于()A. 学习控制系统B. 专家控制系统C. 进化控制系统D. 模糊控制系统正确答案:A 满分:2 分12. 模糊控制是以模糊集合为基础的,提出模糊集合的科学家是()A. N.J.NilsonB. L.A.ZadehC. A.TuringD. H.A.Simon正确答案:B 满分:2 分13. 一般认为,人工神经网络适用于()A. 线性系统B. 多变量系统C. 多输入多输出系统D. 非线性系统正确答案:D 满分:2 分14. 智能自动化研究开发与应用应当面向()A. 生产系统B. 复杂系统C. 管理系统D. 非线性系统正确答案:B 满分:2 分15. 能够在系统运行过程中估计未知信息,并据之进行优化与控制,以便逐步改进系统性能的控制叫做()A. 最优控制B. 反馈控制C. 随机控制D. 学习控制正确答案:D 满分:2 分16. 学习控制具有()等功能。
西电智能控制大作业

题目:浅谈智能控制班级:姓名:学号:目录摘要 (3)Abstract (3)1.前言 (4)2.智能控制的定义 (4)3.传统控制系统的特点 (5)4.传统智能控制面临的难题 (5)5.智能控制系统的特点 (6)6.智能控制的研究内容 (6)6.1 分层递阶控制系统 (7)6.2学习控制系统 (8)6.3专家控制系统 (9)6.4人工神经网络控制系统 (10)6.5模糊控制系统 (11)7.智能控制的发展与前景 (11)参考文献 (12)浅谈智能控制摘要本文是对智能控制的一个综述,结合这学期学习智能控制原理与应用的感悟,介绍了智能控制产生的定义,特点,应用,研究内容,对智能控制所面临的问题与挑战进行了叙述,还具体阐述了未来发展的趋势和前景,说明了智能控制象征着自动化的未来。
智能控制正是在各行各业应用中的一个缩影,它的作用以及影响力将会关系到国民生计。
又因为在当今社会各行各业中,智能控制技术对实现生产过程自动化有着更为积极的作用。
所以智能控制技术的研究和发展也越来越成为当代科学的一门重要课程。
AbstractThis paperis an overview of theintelligent control,it introduces the definition, the characteristic ,the application and the research contents of intelligent control.It describes the problems and challenges faced by intelligent control,the future development trends and prospects.So intelligent control symbolizes the future of automation.Intelligent control is so important that it relates to national life.Because in today's society in all walks of life, intelligent control technology has play a more active role to achieve automation of the production process.Therefore, the research and development of intelligent control technology is increasingly becoming an important course of contemporary science.关键词:智能控制定义人工智能传统控制研究内容发展与前景1.前言人类的进化归根结底是智能的进化,而智能反过来又为人类的进步服务。
煤矿运输队作业过程智能控制方案

煤矿运输队作业过程智能控制方案煤矿运输队作业过程中,为了提高工作效率、降低人力成本并确保安全,智能控制方案是一种不可忽视的解决方案。
本文旨在探讨与煤矿运输队作业过程相关的智能控制方案,以提供可行的解决方案。
一、背景介绍随着社会的发展和经济的不断增长,煤矿行业的运输需求也在不断增加。
传统的煤矿运输队作业模式面临诸多问题,如人力成本高、作业效率低下、安全风险较高等。
因此,研发一种智能控制方案具有重要意义。
二、智能控制方案的定义与优势智能控制方案是指利用先进的技术手段,如人工智能、物联网等,对煤矿运输队的作业过程进行智能化控制的方案。
其主要优势包括以下几个方面:1. 提高作业效率:智能控制方案能够自动化完成煤矿运输队的作业任务,充分利用机械运输设备的效能,提高作业效率。
2. 降低人力成本:智能控制方案的应用能够减少对人力资源的依赖,降低运输队的作业成本。
3. 提升安全性:智能控制方案能够通过实时监控运输队的作业过程,及时发现和解决安全隐患,降低事故发生的概率。
4. 数据分析与优化:智能控制方案可以收集大量的运输数据,并通过数据分析来优化运输队的作业流程,提高整体效益。
三、智能控制方案的实施步骤在实施智能控制方案时,以下步骤是必不可少的:1. 采集数据:通过物联网技术和传感器等设备,收集运输队作业过程中的关键数据,如运输车辆的位置、速度、载重等。
2. 数据传输与处理:建立一个稳定的数据传输通道,将采集到的数据传输到中央处理系统,并对数据进行分析和处理。
3. 智能控制决策:基于数据分析的结果,制定智能控制的相关策略和规则,例如运输车辆的调度和路径规划等。
4. 实施与监控:在运输队作业过程中,根据智能控制方案的决策进行实施,并实时监控作业过程,及时调整和优化方案。
5. 持续改进:根据实际情况和效果评估,持续改进智能控制方案,逐步完善和提高智能化水平。
四、智能控制方案的应用案例以某煤矿运输队为例,通过引入智能控制方案,取得了良好的效果。
智能控制大作业【范本模板】
南京工程学院自动化学院《智能控制技术》大作业课程名称:智能控制技术院(系、部、中心):康尼学院专业:自动化班级: K自动化121 姓名:刘爽学号: 240120902课程论文成绩评定:指导教师签字:2015 年 6 月 24 日摘要模糊控制是以模糊集合论作为它的数学基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景.本文简要回顾了模糊控制理论的发展,详细介绍了模糊控制理论的原理和模糊控制器的设计步骤,分析了模糊控制理论的优缺点以及模糊控制需要完善或继续研究的内容,根据各种模糊控制器的不同特点,对模糊控制的应用进行了分类,并分析了各类模糊控制器的应用效能.最后,展望了模糊控制的发展趋势与动态。
关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展第一节引言1。
1 模糊控制系统简介模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术.自从美国加利福尼亚大学控制论专家L.A.Zadeh教授在1965年提出的《Fuzzy Set》开创了模糊数学的历史,吸引了众多的学者对其进行研究,使其理论和方法日益完善,并且广泛的应用于自然科学和社会科学的各个领域,尤其是第五代计算机的研制和知识工程开发等领域占有特殊重要的地位.把模糊逻辑应用于控制领域则始于1973年.1974年英国的E.H.Mamdani成功地将模糊控制应用于锅炉和蒸汽机的控制.此后20年来,模糊控制不断发展并在许多领域中得到成功应用。
由于模糊逻辑本身提供了由专家构造语言信息并将其转化为控制策略的一种体系理论方法,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题,所以它是处理推理系统和控制系统中不精确和不确定性的一种有效方法。
智能控制导论作业之智能控制的应用实例-报告
智能控制导论作业之智能控制的应用实例|自动化专业实习报告|毕业实习报告|暑假实习报告|暑期实习报告|实习报告范文|大学生实习报告|大学实习报告|实习总结若图片无法显示请联系站长智能控制的应用实例1、引言智能控制是近年来控制界新兴的研究领域, 自1985年召开第一届智能控制学术会至今,智能控制已经被广泛应用于社会众多领域。
为解决那些基于精确数学模型的传统控制方法难以解决的复杂系统的控制问题提供了有效的理论和方法。
它是对传统控制理论的发展,是自动控制发展的高级阶段,代表着自动控制科学发展的最新进程。
随着人们生活水平的不断提高,家居环境或是休闲娱乐场所都安装各种各样的观赏型鱼缸,而保持一个适宜水族生活的环境是一件非常耗费精力的工作。
针对水族生活环境的净化和改善的设备有很多,目前市场上常用的鱼缸控制系统有:过滤器、加热器、加氧泵等改善水质的设备,但是它们大多是非智能化的、单独工作的器件。
如果仅仅把多个单独的设备组成一套多功能的鱼缸控制系统,需要投入的费用较大,同时多个单一器件机械化的组装之后,也存在一定的资源浪费,该系统则是从系统集成开发的角度进行设计和开发,根据当前市场上的需求,形成了一套集恒温控制、自动充氧、自动水位控制进排水,自动照明和自动喂食等功能为一体的控制系统。
系统以AT89S52单片机为核心,实现对鱼缸的集中控制和管理。
下面从系统设计的功能组成、系统控制参数,系统控制核心部分的硬件设计电路和程序控制流程图等方面加以描述。
2、系统的功能组成与系统控制参数2.1系统功能组成该系统的设计是在充分了解并分析目前各类鱼缸控制器的前提下进行的,整个系统共分为以下几个功能子系统:即自动加热/制冷恒温控制,自动/定时充氧系统, 自动水位控制系统, 自动水循环系统, 自动照明系统, 自动喂食控制系统等。
这些子系统都有各自的信号检测输入以及控制输出功能,并结合系统的时钟电路,数据存储电路/看门狗/复位电路以及各子系统的功能参数的设置与LED显示电路,共同集成为一套功能完善的智能控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、已知某一炉温控制系统,要求温度保持在600 度恒定。
针对该控制系统有以下控制经验:(1)若炉温低于600 度,则升压;低的越多升压越高。
(2)若炉温高于600 度,则降压;高的越多降压越低。
(3)若炉温等于600 度,则保持电压不变。
设模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。
输入、输出变量的量化等级为7 级,取5 个模糊集。
试设计隶属度函数误差变化划分表、控制电压变化划分表和模糊控制规则表。
解:1)确定变量定义理想温度为600 C,实际温度为T,则温度误差为E=600-T。
将温度误差E 作为输入变量2)输入量和输出量的模糊化将偏差E分为5个模糊集:NB、NS、ZO、PS、PB,分别为负小、负大、零、正小、正大。
将偏差E 的变化分为7 个等级:-3 -2 -1 0 1 2 3,从而得到温度模糊表如表1 所示。
表1温度变化E划分表控制电压也分为个模糊集:、、、、,分别为负小、负大、零、正小、正大。
将电压u的变化分为7个等级:-3 -2 -1 0 1 2 3,从而得到电压变化模糊表如表2所示。
表2电压变化u划分表表3 模糊控制规则表E PB PS ZO NS NB u PB PS ZO NS NBEdit or: Un+ it 1 e J.歼cw OptigT叮叮小文库叮叮小文库2、利用MATLAB,为下列两个系统设计模糊控制器使其稳态 误差为零,超调量不大于 1%,输出上升时间w 0.3s 。
假定被 控对象的传递函数分别为:Gge 0亦(s 1)2G2(S )4.228(s 0.5)( s 21.64 s 8.456)解:在matlab 窗口命令中键入 fuzzy ,得到如下键面:设e 的论域范围为[-1 1] , de 的论域范围为[-0.1 0.1] , u 的论 域范围为[0 2]。
将e 分为8个模糊集,分别为 NB ,NM, NS, NZ, PZ, PS, PM,PB; de 分为7个模糊集,分别为NB ,NM ,NS, Z ,PS ,PM ,PB; u 分为7个模糊集,分别为 NB ,NM ,NS, Z ,PS ,PM ,PB;叮叮小文库MATLAB中的设置界面如下:模糊规则的确定:叮叮小文库模糊控制器的输出量在simulink中调用模糊控制器,观察输出结果D#日脅K电Q - *・阿甌32屈巴宦由・JL m jHIQi运行结果为ScopeScopelI L I : 11;§g/. i Scope23、利用去模糊化策略,分别求出模糊集A的值。
模糊集A 的定义为:A(X) trap (x,10,30,50,90)解:(1)面积重心法»K=10:l:100;>> A=trapnf (KJ, [10. 30j 50. 90]);>> XK=defuss (Xj Aj 5 centroid5)KX -46(2)面积等分法»^10:1:100;>> A=trapiTLf [10, 30j 50j 90]);>> KK=defuzz (K,infj "bisector5)玄左=(3)最大隶属度平均法叮叮小文库» ^10:1: 100:» ^=trapmf (超[103 30, 5Cij 90]);>> ^x= defuzz (KJ A J * mom7)zx =40(4)最大隶属度取最小法» 心D: 1:100(>> A=t rapnrf (xj [103303 5C390] \ ;>> xx=defuzz (KJ A J7som:)SK =30(5)最大隶属度取最大法»x=10:l!100;>> rapinf (英」[10, 30j 50, 90]);» KK=defusz Aj ' I DHL')KK =504、设论域x={a1 , a2, a3}, y={b1 , b2, b3}, z={c1 , c2}已知A 0.5 1 0.1 , B 01 丄26 0.4 1A ——一——B bbaC ——ai a2 a3 S❻电q Q 试确定“If A AND B then C 所决定的模糊关系R,以及输入为A1 1-00.50.1B1 o.10.51叮叮小文库-a1a2a31 d b2b310时的输出C1。
解:A 0.5 1 0.1 B 0.1 1 0.6C 0.4 1A110.50.1B10.10.510.50.10.50. 5D A B10.110.60.110.60.10.10.10.10.10.10.10.50.40.50.50.40.50.10.10.1R D T C 1 0.410.410.60.40.60.10.10.10.10.10.10.10.10.110.1 0.51D1A B10.5 0.10.5 10.1 0.50.50.10.1 0.10.10.1 0.10.4 0.50.4 0.50.1 0.1D1T R 0.1 0.5 1 0.1 0.5 0.5 0.1 0.1 0.1 0.4 1 0.4 0.5 0.4 0.60.1 0.10.1 0.10.1 0.15利用两层BP 神经网络完成对[-n, n ]区间上正弦函数逼 近,隐层函数取 S 型传输函数,输出层的激活函数取线性传 输函数。
(采用神经网络工具箱提供的函数完成)解:根据条件在 MATLAB 环境下,采用神经网络工具箱提 供的函数完成正弦函数逼近如下: 程序代码如下:» i= [^pi:0.01:pi]; » y=sin (Kl ,» net 二nevff (ninraE [20J 1 ]j C tan.sig ,j 5 purelin ,}), » yl=sinitnetjX );» netn trainparaii ・ go^l 二0. DI; » net=t口 (口氏』知 y ).TRAIB1X Epoch 0/50, JEE 8.64811/0.01, Gradient 5060.09/1 B -0 10 TKAIHLl Epoch 1/50; USE 0.00123415/0.01, Gradient IL0158/le-010 TRAINLM 3 Perfooance goal met. » y2=sinL (netjX ); » figure,» pl 毗 3”,岸,y2j g —')iC 1c i0.4 0.5 C 2仿真结果如下:图1为原函数与网络训练前后仿真结果的比较(图中红色曲线代表训练前的网络,绿色代表训练后的网络,蓝色代表原函数)叮叮小文库图1原函数与网络训练前后的仿真结果图2为误差曲线Tiiiinjnt *Llh T :E;l» Eli l Vis* I AE 紅l UooLs也曲* lk ;pPerttmrisnti it O.ULHUmiz, Loa isll.lllIO 1兰c m cj 口巳 Gn m w u -S B J J I w 110-31U J0 o n i □?0.5 a d 0.5 as n 丁 oa ng[DtcyTiQiMq I'ne F F nch图2 误差曲线叮叮小文库一、概述二、在汽车上的应用方面三、举例说明在汽车空调当中的应用、概述1、什么叫模糊控制?所谓模糊控制,就是对难以用已有规律描述的复杂系统,采用自然语言(如大、中、小)加以叙述,借助定性的、不精确的及模糊的条件语句来表达。
模糊控制是一种基于语言的一种智能控制2、为什么采用模糊控制?传统的自动控制控制器的综合设计都要建立在被控对象准确的数学模型(即传递函数模型或状态空间模型)的基础上,但是在实际中,很多系统的影响因素很多,(油气混合过程、缸内燃烧过程等),很难找出精确的数学模型。
这种情况下,模糊控制的诞生就显得意义重大。
因为模糊控制不用建立数学模型不需要预先知道过程精确的数学模型。
要研制智能化的汽车,就离不开模糊控制技术如汽车空调:人体舒适度的模糊性和空调复杂系统3、工作原理把由各种传感器测出的精确量转换成为适于模糊运算的模糊量,然后将这些量在模糊控制器中加以运算,最后再将运算结果中的模糊量转换为精确量,以便对各执行器进行具体的操作控制。
在模糊控制中,存在着一个模糊量和精确量之间相互转化的问题模糊控制原理图S:系统的设定值。
x1, x2:模糊控制的输入(精确量)。
X,1 , X2: 模糊量化处理后的模糊量。
U:经过模糊控制规则和近似推理后得出的模糊控制量。
u:经模糊判决后得到的控制量(精确量)。
y:对象的输出。
输入量模糊化 建立模糊规则 进行模糊推理 输出量反模糊① 适用于不易获得精确数学模型的被控 对象,② 是一种语言变量控制器③ 从属于智能控制的范畴。
该系统尤其 适于非线性,时变,滞后系统的控制④ 抗干扰能力强,响应速度快,并对系 统参数的变化有较强的鲁棒性。
、模糊控制在汽车的应用方面1、 ABS 防抱死系统 工况的多变及轮胎的非线性2、 汽车巡航系统 外界负荷的扰动、汽车质量和传动系效率的不确 定性、被控对象的强非线性莆戏t靑即亘.叶.检«量3工作步骤:3、模糊控制的特点叮叮小文库3、汽车空调人体舒适感的模糊性和空调复杂结构4、半主动悬架系统参数不稳定性5、发动机三、在汽车空调上的应用对汽车空调系统的要求:★技术性能和控制性能优良,满足人体舒适性的要求;★节能自动控制的应用是达到这两方面要求的一个重要途径。
经典控制理论:建立数学模型现代控制理论:状态方程空调器为典型的传质换热系统,结构和内部物理过程复杂,难以建立精确的数学模型。
汽车空调由于工作条件多变,用传统的控制方法如:PID控制,难以获得较好的控制效果。
对于环境干扰,鲁棒性好,能够抑制非线性因素对控制器的影响全空调型客车空调原理图1、外进风;2出风口;3蒸发器风机:4蒸发器芯;5热水器芯:6温度门:7、出风口:8车内进风叮叮小文库模糊控制是基于语言的控制 模糊语言集的组成:T ( E )T ( E ) ={负大,负中,负小,零,正小,正中,正大}用模糊语言变量E 来描述偏差, 或用符号表示负大 NB( Negative Big )、 负中 NM( Negative Medium )、 负小 NS ( Negative Small 零 ZE ( Zero )、正小 PS ( Positive Small )、 正中 PM( PositiveMedium ), 正大 PB (Positive Big ), 则:T (E ) = {NB ,NM NS, ZE , PS, PM ,PB}糊子集多,因而控制精度更高(在其它条件相同的情况下)。