列车运行控制系统
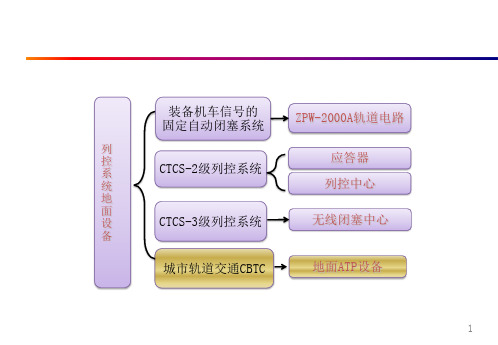
精选列车运行控制系统44列控地面设备CBTC地面设备
一、系统组成
ATS系统 ATS系统主要实现对列车运行的监督和指挥,辅助调度任意对全线列车进行管理,ATS包括控制中心和车站设备。 基本功能包括:列车识别和跟踪、运行图管理、列车进路办理、在线列车冲突管理、列车运行自动调整、扣车、跳车、临时限速等。
联锁系统 轨道空闲处理、进路控制、道岔控制和信号控制功能是CI子系统的主要功能。进路控制功能负责整条进路的排列、锁闭、保持和解锁。道岔控制功能负责道岔的解锁、转换、锁闭和监督。这些动作是对ATS子系统命令的响应。信号控制功能负责监督轨道旁信号机的状态,并根据进路、轨道区段、道岔和其它轨旁信号机的状态来控制信号机。 它根据来自ATS的命令设置信号机何时为停车显示。它也产生命令输出,ATC系统以此来控制列车从一个进路行驶到另一进路。
CBTC系统是指通过无线通信的方式实现列车和地面间连续通信的列车控制系统。系统的核心部分为轨旁和车载两部分。 列车通过机车上的测速传感器和线路上的应答器来得到列车的实时位置,应答器在线路的固定位置设置,列车每经过一个应答器就会在数据库中查找其位置,从而得到列车的精确位置,列车的实时速度是通过测速传感器获得的,速度对时间的积分获得列车的相对位移,每经过一个应答器的实际位置加上相对该应答器的相对位移就可以实时的获得列车的准确位置。VOBC将列车的准确位置通过WLAN发送给轨旁设备,实现列车对地面设备的通信。 轨旁的核心设备是区域控制器ZC,它负责管态(道岔、屏蔽门、紧急停车按钮、计轴区段等),向地面ATP系统发送障碍物信息及联锁的进路信息。(4)确定行车许可的计算范围。地面ATP接收到联锁的进路信息、障碍物信息,根据列车在线路上的位置信息,确定列车当前能够使用的进路范围。 如下图所示,列车运行在进路R1上,进路R2、R3均已排列,地面ATP通过线路上列车运行情况及信号机的接近区段情况判断该车为最接近进路R2和R3的受控制的列车,将进路R1、R2、R3均分配给该列车使用,这样就确定了为该列车计算行车许可需要考虑的范围。
列车运行控制系统概述

❖ 上海地铁1号线1989年引进阿尔斯通美国公司的ATC系
统,为了节省投资,在正线道岔联锁区域和车辆段采 列车运行控制系统概述
❖ ATC系统的大量引进拉近了我国地铁信号装配 水平与国际上的差距,取得了较好的效果。我 国地铁的整体技术水平上了一个台阶,列车运 行呈现出全新的面貌。此后不久,我国又对部 分设备实施国产化,取得了较好的效果。
第1章 列车运行控制系统概述
3.发展阶段
❖ 从1994年至今,我国城市轨道交通建设进入 了 快速发展期,随之而来的是信号设备的大 规模引进。
❖ 采用引进设备后,大大缩短了运行间隔,提 高了安全程度和通过能力,但由于国内外的 电源质量、道岔结构、轨道施工工艺等存在 差异,所以引进的ATC系统在我国的应用效 果不像在国外那么好。而且,引进的设备也 会带来后续的诸多问题。
❖ 进入20世纪90年代以后,大量引进国外先进的地铁信号 设备。北京地铁1号线于1989年从英国西屋公司引进 ATC系统。复八线由于要与前期的一号线贯通,为了便 于既有信号系统兼容,复八线也大量引进了英国西屋公 司的列车自动控制系统(ATC)。同时,配套了国产的 继电联锁设备、车站计算机联锁设备和信号微机联锁监 测设备等。
第1章 列车运行控制系统概述
❖列车自动控制(Automatic Train Control,简称 ATC)系统早在20世纪60年代就已经开始被研制 和试用。日本于1964年交付使用了世界上第一条 高速铁路——东海道新干线,其以机控为主、设 备优先的列车控制系统,使列车在高速度、高密 度运行的条件下,安全运行30多年。
第1章 列车运行控制系统概述
❖ 进入20世纪70年代之后,列车速度的提高对列 车运行控制系统在安全和效率方面提出了更高 的要求,随着地面信息传输技术(应答器、轨 道电路和轨间环线电缆等)和列车信息接收技 术的不断完善,出现了点式ATC系统、点连式 ATC系统
中国列车运行控制系统(CTCS)

CTCSCTCS是(Chinese Train Control System)的英文缩写,中文意为中国列车运行控制系统。
CTCS系统有两个子系统,即车载子系统和地面子系统。
CTCS根据功能要求和设配置划分应用等级,分为0~4级。
1. CTCS概述TDCS是铁路调度指挥信息管理系统,主要完成调度指挥信息的记录、分析、车次号校核、自动报点、正晚点统计、运行图自动绘制、调度命令及计划的下达、行车日志自动生成等功能,换句话说就是原来行车调度员和车站值班员需要用笔记下的东西现在都可以由TDCS自动完成。
中国铁路调度指挥系统参考欧洲ETCS规范,中国逐步形成了自己的CTCS(Chinese Train Control System)标准体系。
如何吸收ETCS规范并结合中国国情更好地再创新,是值得深入研究的课题。
铁路是国民经济的大动脉,是中国社会和经济发展的先行产业,是社会的基础设施,铁路运输部门又是国民经济中的一个重要部门,它肩负着国民经济各种物资运输的重任,对中国社会主义建设事业的发展有着举足轻重的作用。
为了满足国民对铁路运输的要求,进入二十一世纪以后,铁路部门致力于高速铁路和客运专线的建设,并取得了骄人的成绩。
为了适应中国高速铁路、客运专线的迅速发展和保证铁路运输安全的需要,铁道部有关部门研制成功了“CTCS系统”(即:铁路列车控制系统,是Chinese Train Control System的缩写“CTCS”)2. 产生背景由于早期欧洲铁路的列车运行控制系统种类繁多,且各国信号制式复杂、互不兼容,为有效解决各种列车控制系统之间的兼容性问题,保证高速列车在欧洲铁路网内跨线、跨国互通运行,1982年12月欧洲运输部长会议做出决定,就欧洲大陆铁路互联互通中的技术问题寻找解决方案。
2001年欧盟通过立法形式确定ETCS(European Train Control System)为强制性技术规范。
ETCS的主要目标是互通互用、安全高效、降低成本、扩展市场,在规范的设计上融入了欧洲各主要列控系统的功能,制定了比较丰富的互联互通接口。
列车运行控制系统的五个级别

列车运行控制系统的五个级别一、列车运行控制系统的五个级别列车运行控制系统是保障列车安全运行的重要设备,它通过控制列车的速度、位置和运行模式,确保列车在轨道上的稳定运行。
根据功能和安全性等方面的不同,列车运行控制系统可以分为五个级别,分别是ATC、ATO、CBTC、CTBC和ETCS。
二、ATC(Automatic Train Control)级别ATC是列车运行控制系统的最基本级别,它主要通过信号系统和车载设备实现对列车的自动控制。
在ATC级别下,列车通过接收信号系统发出的信息,控制列车的速度和位置,以确保列车在规定的区间内安全运行。
ATC级别适用于高速铁路等需要保证列车安全运行的场所。
三、ATO(Automatic Train Operation)级别ATO是在ATC基础上进一步发展的列车运行控制系统级别。
ATO级别在保证列车安全运行的基础上,更加注重列车的运行效率和准点性。
相比于ATC级别,ATO级别的列车运行更加自动化,列车的运行速度和位置更加精确可控。
ATO级别适用于城市轨道交通等高密度、高频率的线路。
四、CBTC(Communications-Based Train Control)级别CBTC是一种基于通信技术的列车运行控制系统级别,它通过车载设备和地面设备之间的通信,实现对列车的精确控制。
CBTC级别不仅可以控制列车的速度和位置,还可以实现列车的精确停站、车辆调度和列车间的安全距离控制等功能。
CBTC级别适用于复杂的轨道交通系统,如地铁、轻轨等。
五、CTBC(Communication-Based Train Control)级别CTBC是一种基于通信技术的列车运行控制系统级别,它在CBTC的基础上进一步发展,主要用于高速铁路系统。
CTBC级别通过车载设备和地面设备之间的通信,实现列车的精确控制和列车间的安全距离控制。
CTBC级别的列车运行更加高效、精确和安全,适用于高速铁路等需要高速、高频的线路。
列车运行自动控制系统的组成

列车运行自动控制系统的组成
列车运行自动控制系统通常由以下几部分组成:
1. 轨道信号系统:包括信号机和轨道电路,用来指挥、监控列车的运行状态和速度。
2. 列车控制中心:负责传输和处理轨道信号系统发送的指令,控制列车的起动、行驶和停车等操作。
3. 信号设备:包括信号灯、车站显示屏、列车接收器等,用来向列车驾驶员和乘客发送运行信息。
4. 列车自动控制装置:位于列车上的设备,通过接收来自信号系统的信号,控制列车的运行速度和停车。
5. 信息传输系统:用来传输轨道信号和列车运行数据的系统,可以采用有线或无线通信技术。
6. 列车位置和速度检测系统:通过安装在轨道上的传感器,监测列车的位置和速度,并将数据传输给列车控制中心。
以上是列车运行自动控制系统的主要组成部分,不同的列车类型和运营模式可能会有所不同。
高速铁路信号系统-第三章 列车运行控制系统

3.2 ATP概述
点连式 ATP
点连式 ATP 是利用轨道电路传输连续信息,应答器传输点式信息的列控系统。
3.2 ATP概述
连续式ATP
(3)无线方式。 无线方式指利用无线通信的方式传输信息。地面编码器生成编码信息,通过轨道天 线向车上发送。信号显示控制接口负责检测要发送的信号显示,并从已编程的数据中 选出有用数据传送至编码器,同时选出与限制速度、坡度、距离等相关的轨道数据。 编码器用高安全度的代码将这些数据编码,经过载波调制,馈送至轨道天线向机车发 送。车上接收设备接收限制速度、坡度、距离等数据后,由车载计算机计算出目标速 度,并对机车进行监控。
3.2 ATP概述
1. ATP的基本概念 2. ATP分类 3. 分级制动和一级制动 4. 制动优先方式 5. 测速和测距 6. 紧急制动和常用制动
3.2 ATP概述
3.2.1 ATP的基本概念 ATP 的核心是铁路信号速度化,要求信号信息具备明确的速度含义,并根据这些信 息对列车运行速度进行实时的连续监控。地面列控信息主要根据进路、线路条件以 及前后列车的运行位置,在分级速度控制时,产生不同的出口速度信息;在采用速 度-距离模式曲线控制时,产生目标距离、目标速度等信息。 ATP车载设备依据接收到的信息,根据列车构造速度、制动性能计算出控制曲线, 对列车是否遵守信号(速度)指令进行实际运行速度的监控。当列车的实际运行速 度接近、超过允许速度曲线时,ATP车载设备就会报警、卸载、制动,起到防止“两 冒一超”的安全作用。
3.2 ATP概述
3.2.1 ATP的基本概念
我国铁路列车提速后,列车制动距离增加,信号显示距离不足,现行信号显示制式 和列车速度控制方式难以满足行车安全的要求。列车运行速度超过 160 km/h 时, 司机难以辨认地面信号,以司机为主的列车控制系统难以保证列车的安全运行,为 此必须发展 ATP 系统。ATP 的主要功能有:停车点防护、超速防护、列车间隔控 制(移动闭塞时)、测速测距、车门控制等。
中国列车运行控制系统

3
控制系统
控制系统是CTCS的核心组成部分,主要包括中央控制系统和区域控制系统。 中央控制系统负责全线列车的控制和监控,区域控制系统则负责某一区域 的列车控制和监控
中央控制系统通过无线通信网络与车载设备和轨旁设备进行信息交互,获 取列车的状态信息和轨旁设备的控制指令,同时向车载设备和轨旁设备发 送控制指令,调整列车的运行状态。区域控制系统则通过无线通信网络与 本区域的列车和轨旁设备进行信息交互,实现本区域列车的控制和监控
4
技术特点
CTCS具有以下 技术特点
技术特点
技术特点
总之,CTCS-中国列车运行控制系统是中国自主研发 的具有自主知识产权的列车运行控制系统,具有安全、 高效、可维护、可扩展等特点,为列车的安全运行提
供了重要保障
-
清新简约风
十分感谢大家观看
演示文稿是一种实用的工具,可以是演示,演讲,报告等。大部分时间,它们都是在为观众服务。演示文稿 是一种实用的工具,可以是演示,演讲,报告等。
限速信息等,为列车提供安全保障
2
轨旁设备
01.
轨旁设备是CTCS地面设备的组成部分,主要包括轨道电路、应答器、信号机等。这些设 备通过无线通信网络与车载设备进行信息交互,实现列车位置、进路信息、限速信息等 信息的传输和控制
02.
轨道电路是轨旁设备的基本组成部分,用于监测列车的占用情况。应答器则是传递信息的重要设备, 可以向列车发送进路信息、限速信息等。信号机则用于指示列车的运行方向和限速情况,确保列车安 全通过
汇报人:XXXX
1
车载设备
车载设备是CTCS的核心组成部分,主要 包括车载计算机、速度传感器、轴温传 感器、机车信号设备等。这些设备通过 无线通信网络与地面设备进行信息交互, 实现列车位置、速度等信息的实时监测
列车运行控制系统

列车运行控制系统列车运行控制系统是列车在区间运行过程中实现自动化的设备。
一般铁路将这些设备统称为区间设备,包括各种闭塞设备、机车信号和自动停车设备。
在高速铁路上,当行车速度提高后,仍用地面区间设备来调整列车运行,将产生很大困难。
首先是地面信号机的显示不能给司机一个准确的速度限制,其中包括显示的距离和显示的数量,其次是固定的闭塞分区将影响区间的行车效率。
因此,高速运行的列车应采用新的区间设备。
1.列车运行控制系统的形式高速列车运行控制系统的构成由于系统具体应用关键技术实现方法的不同而存在很大区别。
例如,法国TVM430型列车速度监督设备采用无绝缘数字式的编码轨道电路传输列控信息;日本DS ATC系统则采用有绝缘数字式的编码轨道电路传输列控信息;ETCS2级采用铁路数字移动通信系统(global system for mobile communications for railway,GSM R)传输列控信息,采用RBC无线闭塞中心。
2.列车运行控制系统的特点(1)将先进的控制技术、通信技术、计算机技术与铁路信号技术融为一体的行车指挥、安全控制机电一体化的自动化系统。
(2)车载信号属于主体信号,直接为司机指供列车应遵循的安全速度。
(3)自动监控列车运行速度,可靠地防止由于司机丧失警惕或错误操作可能酿成的超速运行、列车颠覆、冒进信号或列车追尾等事故,它是一种行车安全控制设备。
3.列车运行控制系统的构成(1)地面设备。
地面设备包括轨旁设备、列车控制中心(train control center,TCC)和地面通信网络设备。
(2)车载设备。
车载设备包括列车运行监控模块、测速/定位模块、显示器模块、牵引制动接口、运行记录器模块等。
(3)地车信息传输通道。
地车信息传输通道包括地面信息传输设备、车载信息传输设备、地面信息传输网络和车载信息传输网络。
中国铁路列车运行控制系统

200 45
驾驶曲线
监控曲线
• 目标-距离模式曲线
干预点
车载监控曲线 地面信号曲线 无保护闭塞分区
车载计算目标距离 TD(t)
TD (t) TD (t+Δt)
监控点 SL(t)
E(t)
地面计算区间 的占用
E(t) : 对测距误差、列车响应时间、列车制动等的补偿
2)CTCS-2级与CTCS-0级的切换原理
CTCS-2级列控系统结构示意图
BTM:应答器信息接收模块;STM:轨道电路信息接收模块
6.2.2 CTCS-2级列控系统基本工作原理
1)目标距离一速度控制原理
目标-距离(Distance to go)控制曲线,也称一次制动模式速度控制 曲线。列控系统车载设备通过对列车行车许可、线路参数、列车信息的综 合处理,生成目标距离模式曲线,监控列车安全运行。
6.1.2 CTCS系统的功能、结构与分级
1)CTCS系统的基本功能 包括2方面: 按照故障-安全原则,在任何情况下防止
列车无行车许可证运行; 防止列车超速运行,包括列车超过进路
运行速度、线路结构规定的速度。
2)CTCS系统体系结构(四层体系结构)
铁路运输管理层
行车指挥中心,以CTCS为行车安全保障基础,通过通信网络实现对列 车运行的集中控制和管理。
第六章 列车运行控制
320
320
300
270
230
170
35
000
红灯
320 300 270
230
170
列车实际运行曲线
ATP 防护曲线
限
制
速
度
区
35
320
320
300
270
230
170
35
000
未确定
第14页
二、曲线速度防护模式
2.目标—距离(DISTANCE TO GO)曲线控制模式
目标-距离模式曲线控制不再对每一个闭塞分区规定一个目标速度, 而是向列车传送目标速度、目标距离(可包含多个闭塞分区)。
Km/h 200
150
100
50
0
200
160
100
0
分段制动和一次制动方式示意图
分段制动需要多个空走距离和安全距离,若采用一次制动只需要一个空走距
离和安全距离。
第8页
二、曲线速度防护模式
1.分级曲线速度控制模式 每个闭塞分区仍然给定一个目标速度。
320
320
300
270
230
170
35
000
闭塞分区分界处绝缘节位置相对固定,且两边闭塞分区传输信息不同。 列车可以根据接收到信息的变化来了解通过绝缘节的时机,从而获得列 车位置信息。
甲站
乙站
f5
f1
f3
f5
f1
f3
f2
f4
f6
f2
f4
f6
分区1
分区2
分区3
分区4
第22页
三、列控系统关键技术
2>计轴器定位方法 计轴传感器安放也是固定的,通过计轴器检测列车占用或者出清对应计 轴区段也可以获得列车位置信息。
列车运行控制系统

列车运行控制系统定义:由列控中心、闭塞设备、地面信号设备、地车信息传输设备、车载速度控制设备构成的用于控制列车运行速度保证行车安全和提高运输能力的控制系统。
功能:1. 线路的空闲状态检测;2. 列车完整性检测3. 列车运行授权;4. 指示列车安全运行速度;5. 监控列车安全运行系统分类发达在列控系统研究方面已有较长发展历史,比较成功的列控系统主要有:日本新干线ATC系统,法国TGV铁路和韩国高速铁路的TVM30C及TVM430系统,德国及西班牙铁路采用的LZB系统,及瑞典铁路的EBICA900系统等。
上述列车控制系统都具有自己的特点、不同的技术条件和适应范围,因此,列控系统可以分成许多类型。
(1)按照地车信息传输方式分类:①连续式列控系统,如:德国LZB系统、法国TVM系统、日本数字ATC系统。
连续式列控系统的车载设备可连续接收到地面列控设备的车- 地通信信息,是列控技术应用及发展的主流。
采用连续式列车速度控制的日本新干线列车追踪间隔为 5min ,法国TGV北部线区间能力甚至达到 3 min。
连续式列控系统可细分为阶梯速度控制方式和曲线速度控制方式。
②点式列控系统,如:瑞典EBICAB系统。
点式列控系统接收地面信息不连续,但对列车运行与司机操纵的监督并不间断,因此也有很好的安全防护效能。
③ 点一连式列车运行控制系统,如: CTCS2级,轨道电路完成 列车占用检测及完整性检查,连续向列车传送控制信息。
点式 信息设备传输定位信息、进路参数、线路参数、限速和停车信 息。
( 2 )控制模式分,分为两种类型:① 阶梯控制方式出口速度检查方式,如:法国 TVM300系统入口速度检查方式,如: 日本新干线传统 ATC 系统② 速度—距离模式曲线控制方式速度-距离模式,如:德国LZB 系统,日本新干线数字 ATC 系统(3)按照人机关系来分类,分为两种类型:① 设备优先控制的方式。
如:日本新干线 ATC 系统。
列车运行控制系统

列车运行控制系统铁路通信信号系统是铁路运输的基础设施,是实现铁路统一指挥调度,保证列车运行安全、提高运输效率和质量的关键技术设备,也是铁路信息化技术的重要技术领域。
现代信息类技术的迅速发展。
对铁路信号、通信产品和服务产生了重要影响。
铁路通信和信号技术,以及现代铁路信息化系统之间的关系和作用变得密不可分。
车站、区间和列车控制的一体化,铁路通信信号技术的相互融合,以及行车调度指挥自动化等技术,冲破了功能单一、控制分散、通信信号相对独立的传统技术理念,推动了铁路通信信号技术向数字化、智能化、网络化和一体化的方向发展。
在列车运行控制技术方面,计算机、通信、控制技术与信号技术集成为一个自动化水平很高的列车运行自动控制系统(简称列控系统)。
列控系统不仅在行车安全方面提供了根本保障,而且在行车自动化控制、运营效率的提高及管理自动化等方面,提供了完善的功能,并向着运输综合自动化的方向发展。
列控系统技术是现代化铁路的重要标志之一。
随着列车速度的提高,列车的运行安全除了以进路保证外,还必须以专用的安全设备,监督、强迫列车(司机)执行。
这些安全设备从初级的列车自动停车装置、自动告警装置、列车速度自动监督系统(或列车速度自动检查装置)发展到列车速度自动控制系统。
列车自动控制系统(ATC)—般指系统设备(包括地面设备和车载设备),同时也是一种闭塞方式,主要包括:1.以调度集中系统CTC为核心,综合集成为调度指挥控制中心。
2.以车站计算机联锁系统为核心,综合集成为车站控制中心。
3.以列车速度防护与控制为核心,综合集成为列车(车载)运行控制系统。
4、以移动通信(例如GSM-R)平台,构建通信信号一体化的总成系统(例如CTCS)。
列车自动控制系统(ATC)的主要功能有四项:·检查列车在线路上的位置(列车检测)。
·形成速度信号(调整列车间隔)。
·向列车发送速度信号或目标距离信号(信号传输)。
·按速度或目标距离信号控制列车制动(制动控制)。
列车运行控制系统的五个级别

列车运行控制系统的五个级别一、列车运行控制系统的五个级别1. 人工驾驶2. 半自动驾驶3. 自动驾驶4. 线路自动保护5. 无人驾驶二、人工驾驶人工驾驶是指列车由驾驶员全程操控的模式。
在这个级别下,驾驶员负责列车的启动、加速、减速、停车等操作。
驾驶员需要依靠自己的经验和技术来保证列车的安全运行。
人工驾驶模式下,列车的运行完全依赖于驾驶员的操作,需要驾驶员对列车运行的各种情况做出及时的反应和决策。
三、半自动驾驶半自动驾驶是指列车在驾驶员的辅助下进行运行的模式。
在这个级别下,列车可以自动进行加速、减速、停车等操作,但驾驶员仍然需要负责列车的起步和终点的操作。
驾驶员可以通过控制面板来设定列车的运行速度和目的地,列车会根据设定的参数来自动进行运行。
半自动驾驶模式下,驾驶员可以更轻松地控制列车的运行,减轻了驾驶员的工作负担。
四、自动驾驶自动驾驶是指列车在没有驾驶员的情况下进行全自动运行的模式。
在这个级别下,列车可以自主进行起步、加速、减速、停车等操作,完全不需要驾驶员的干预。
列车会通过激光雷达、摄像头等传感器来感知周围的环境,并根据不同的情况做出相应的决策。
自动驾驶模式下,列车可以更加精确地控制自己的运行,提高了运行的安全性和稳定性。
五、线路自动保护线路自动保护是指列车在运行过程中通过信号系统来保证安全运行的模式。
在这个级别下,列车会根据信号系统的指示来控制自己的运行。
信号系统会根据列车的位置和速度来发送相应的指令,列车会根据指令来调整自己的运行状态。
线路自动保护模式下,列车可以在遇到紧急情况时及时做出反应,保证列车的安全运行。
六、无人驾驶无人驾驶是指列车在没有驾驶员的情况下进行全自动运行,并且没有信号系统的保护的模式。
在这个级别下,列车会完全依靠自己的系统来进行运行。
列车会通过激光雷达、摄像头等传感器来感知周围的环境,并根据不同的情况做出相应的决策。
无人驾驶模式下,列车可以更加灵活地控制自己的运行,提高了运行的效率和安全性。
列车运行控制系统的五个级别
列车运行控制系统的五个级别
列车运行控制系统的五个级别是:
1. Level 0:无自动化系统。
所有列车运行功能由乘务员手动控制和监控。
2. Level 1:列车操作员辅助系统(ATO)。
该系统通过自动控制列车的加速、制动和保持列车在规定的速度和距离范围内行驶,但乘务员仍需负责开关门、监控列车运行和应对紧急情况。
3. Level 2:有限度的自动列车控制(GoA2)。
列车在ATS(自动列车监控系统)的控制下自动运行,但乘务员仍需负责开关门和处理紧急情况。
4. Level 3:条件自动列车操作(GoA3)。
列车在ATS的控制下自动运行,乘务员只需负责开关门。
该级别下,列车在特定条件下可完全自主地进行加速和制动。
5. Level 4:高度自动列车操作(GoA4)。
列车在ATS的完全控制下自主运行,乘务员不再需要驾驶员。
该级别下,列车可以应对各种情况,包括紧急情况和列车故障。
列车运行控制系统的五个级别
列车运行控制系统的五个级别1. 介绍列车运行控制系统(Train Control System,简称TCS)是用于控制和监控列车运行的关键系统。
TCS通过集成多个子系统,包括信号系统、制动系统、速度控制系统等,确保列车在运行过程中安全、高效地运行。
TCS的级别划分是根据系统的功能和性能来划分的,不同级别的系统具有不同的能力和特点。
本文将详细介绍列车运行控制系统的五个级别,包括级别0到级别4。
2. 级别0级别0是最基本的列车运行控制系统级别,也被称为无自动化级别。
在级别0中,列车的运行完全依赖于驾驶员的操作,所有的控制和调度都由驾驶员手动完成。
这种级别的系统没有任何自动化功能,驾驶员需要全程掌控列车的运行和操作。
级别0适用于一些简单的铁路线路,如短途旅客列车和货运列车。
3. 级别1级别1是部分自动化的列车运行控制系统级别。
在级别1中,列车仍然由驾驶员操作,但系统提供了一些辅助功能来帮助驾驶员进行列车运行控制。
这些辅助功能包括速度控制和列车位置监测等。
级别1的系统可以减少人为错误和事故的发生,提高列车的安全性和运行效率。
级别1适用于一些较为复杂的铁路线路,如高速铁路和城市轨道交通。
4. 级别2级别2是半自动化的列车运行控制系统级别。
在级别2中,列车的运行由系统和驾驶员共同控制。
系统通过信号和通信设备与列车进行通信,提供详细的运行指令和信息。
驾驶员根据系统提供的指令进行操作,并负责监控列车的运行情况。
级别2的系统可以实现列车的自动控制、速度调整和车辆分离等功能,减少人为错误和提高列车的安全性和运行效率。
级别2适用于一些较为复杂的铁路线路,如高速铁路和城市轨道交通。
5. 级别3级别3是高度自动化的列车运行控制系统级别。
在级别3中,列车的运行完全由系统控制,驾驶员只负责监控列车的运行情况,并在必要时进行干预。
系统通过信号和通信设备与列车进行实时通信,提供运行指令和信息。
系统可以实现列车的自动控制、速度调整、车辆分离和车辆组合等功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
n 车载设备
速度传感器
天线
车载设备 地面设备
应答器
LEU
信号机或联锁设备
第三章
列控系统基本工作原理
v v = v(s) s 联锁 现场单元控制 轨道占用 ETCS TD-SPMA
轨旁电子单元
欧洲应答器
占用轨道区段的末端
欧洲 应答器
第三章
列控系统基本工作原理
n 地面应答器RUROBALISE
第一章 基本概念与术语(6)
n
基于通信的列车控制(CBTC)
n
n n
站停时间
故障-安全 间隔
n
n n
联锁
移动授权 冗余
第二章
2.1 概述
绪论
n 定义:由列控中心、闭塞设备、地面信号设备、地
车信息传输设备、车载速度控制设备构成的用于控 制列车运行速度保证行车安全和提高运输能力的控 制系统。
n 功能: 线路的空闲状态检测;
列车完整性检测 列车运行授权; 指示列车安全运行速度; 监控列车安全运行
第二章
绪论
2.1 列车运行控制技术发展简史概述 n 列车运行控制技术的发展经过
地面人工信号 地面自动信号 出现机车信号 自动停车 速度码的ATP 基于轨道电路的速度-距离曲线控制的ATP 基于通信的列控系统
第二章
绪论
控制中心
ATS系统 SCADA系统 综合监控系统(供电、信号、通信、车 辆、防灾、车辆段、停车场等)
2.1.11 FAO
多服务的冗余骨干网络
轨旁信号控制系统
车站ATS 轨旁 ATP/ATO 站台安全控制 综合 维护 定位
轨旁通信系统
公共义务 轨旁无线接收 /发送 PIS 应急通信
联锁设备
n 优点 n 由于控制中心“管全局”,统一指挥在其管辖范围内的列车,
对于一些交通繁忙的枢纽是非常有利的,在一旦发生行车误点 或其他行车障碍时,可以迅速地将行车命令传送到列车。
n 缺点
n 一旦控制中心的设备故障即会引起全线交通瘫痪
第三章
列控系统基本工作原理
n 采用轨道电缆的列车运行自动控制系统原理图 v
n 特点
n 轨道电路被用作双重通道:当轨道电路区段上无车时,轨道电
CCTV
车载信号控制系统
车载ATP 车载ATS 制动
地车信息传输 介质
车载通信系统
公共义务 PIS 应急通信
车载ATO
牵引控制
定位
车载无线接收 /发送
CCTV
第二章
绪论
2.2 列车运行自动控制系统组成及分类 n 定义: 基于控制技术、通信技术、计算机技术及铁路信号的行车指
挥、控制及管理自动化系统
n 名 称 问 题 : 日 本 新 干 线 ATC; 法 国 TGV 的
TVM 系 统 ;
德国LZB;英国及瑞典的ATP;地铁ATP系统;等等。
n 系统组成
地面设备
车载设备 信息传输通道
第二章 绪论
列车运行自动控制系统组成
第二章 绪论-车载系统结构
“三取二” 安全车载计 算机
司机室显示
ATO单元
n 与地面信号机设备相连
n 存放固定数据
n 地车传输采用FSK方式
第三章
列控系统基本工作原理
n 轨旁电子单元(LEU)
n LEU是地面应答器与信号机的接口 n 将不同的信号转换为约定的数码
I1
I2
电流
含义 绿灯灯丝电流 黄灯灯丝电流 双黄灯丝电流 红灯灯丝电流 白灯灯丝电流
Cout
11111 11011 10111 00100 10010
第二章
绪论
2.1.2 人工闭塞系统
第二章
绪论
2.1.3 基于轨道电路的闭塞系统
采用轨道继电器的吸起和落下来检测轨道区 段的空闲,根据列车在该轨道区段的占用与 出清来点亮轨旁设置的信号机,见图1-2。列 车将根据轨旁的信号机显示来行车,信号机 的显示定义是带有速度含义的,列车上的司 机必须根据信号机的显示来控制列车,在这 期间,出现了三显示和四显示的固定闭塞系 统。
绪论
2.1.5 自动停车装置
第二章
绪论
2.1.6 速度码控制(Speed Code)的列控系统
第二章
绪论
2.1.7 基于速度-距离曲线控制(Distance To Go)的列控系统
第二章
绪论
2.1.8 基于虚拟/逻辑控制的列控系统
第二章
绪论
2.1.9 基于CBTC控制的移动闭塞系统
第二章
绪论
2.1.1 地面人工信号
铁路运营的开始,就产生了如何控制列车间隔以
保证行车安全的问题,从而产生了行车闭塞法。在 铁路上“闭塞”是指有列车运行的线路区段封闭起 来,不准许其他列车驶入,以防止列车相撞。 这个阶段,主要是依靠信号工的眼睛观测(传感 器),通过人控制的信号给司机传递行车命令(传 输),然后,由司机控制列车运行。而列车间隔调 整依靠人工闭塞。
延伸,但终点总是某一虚拟分区的边界,对列车的控制一般采用一次抛物
线制动曲线的方式,要求运行间隔越短,分区数也越多,但设备基本不增 加。
第一章 基本概念与术语(5)
n
ATC系统
n
n n
列车自动防护(ATP)系统
列车自动监督(ATS)系统 列车自动驾驶(ATO)系统
n
n n
紧急制动
最大常用制动 线路速度限制
I1
I3 I4 I5
I2
LEU
Co u t
I3
I4
I5
第三章 列控系统基本工作原理
n 车载设备
n 车载应答器
n 测速传感器 n 车载安全型计算机 n 驾驶台上的显示、操作和记录 n 制动输出
第三章
列控系统基本工作原理
n 车载设备结构图
第三章
列控系统基本工作原理
1.2 点式列车运行自动控制系统基本工作原理
n 有线 n 轨道电缆 n 数字编码音频轨道电路 n 无线
第三章
列控系统基本工作原理
2.1、采用轨道电缆的列车运行自动控制系统 n工作原理
n 组成:地面控制中心、轨道传输电缆、车载设备
n 地面控制中心根据地面存储的各种信息,结合联锁设备的信息实时
计算列车的最大允许速度,通过轨道电缆传输给车载设备,实现速 度控制
按控制模式分
n n
阶梯控制模式 速度—距离模式曲线控制方式
按照闭塞方式:固定闭塞、移动闭塞 按地车信息传输方式
n n n
点式列车运行自动控制系统
连续式列车运行自动控制系统 点连式列车运行自动控制系统
点式列控系统
连续式列控系统-轨道电路方式
连续式列控系统-轨道电缆方式
连续式列控系统-无线方式
点连续式列控系统-轨道电路+点式应答器
第三章
列控系统基本工作原理
n 概述
n 基本功能 n 间隔控制 n 速度控制 n 基本原理:地面信息——传输通道——车载设备 n 根据传输通道不同分为
n 点式列车运行自动控制系统
n 连续式列车运行自动控制系统
第三章
列控系统基本工作原理
1、点式列车运行自动控制系统
第二章
绪论
轨道电路原理
第二章
绪论
三显示自动闭塞
第二章
绪论
四显示自动闭塞
第二章
绪论
2.1.4 机车信号
地面信号只是向司机提供视觉信号,由司机解释信号显示意义
从而驾驶列车。
信号显示仅仅指明安全运行条件,而列车的安危在很大程度上
在司机手中。
受到自然环境(如雾、风沙、大雨等)的影响以及地形的限制,
~
轨道环线Lloop
PTI车载天线
PTI Vehicle Antenna
FTGS-917 轨道电路
Track circuit
接收天线
Antenna for track circuit
第二章
n 系统分类
绪论
按功能、人机分工和自动化程度分:ATP系统、ATC系统 按人—机关系分:设备优先、 司机操作优先
Lcmax = 128×25 = 3200 m
第三章
列控系统基本工作原理
2.2、采用数字编码轨道电路的列车运行自动控制系统 n 与前面方式的比较
n 点式列控系统存在点式信息传输的不连续性 n 轨道电缆传输价格高,铁路养护麻烦 n 在权衡性能、价格、安全可靠与可用性等方面的情况下,用音频轨
道电路构成的连续式列车运行控制系统在城市轨道交通中得到了广 泛的应用。
第二章
绪论
基于CBTC控制的移动闭塞系统的列车追踪原理
第二章
绪论
基于交叉环线的CBTC系统
第二章
绪论
基于波导管的CBTC系统
漏泻波导原理示意图
车载接收发送器
用户信号
漏泻波导管
轨旁接收发送器
用户信号
(轨旁ATP, -图象数据
第二章
绪论
基于自由波传输的CBTC系统
第二章
绪论
2.1.10 ATO
v max
v允许
B
A
s
v允许
控制中心 列车信息
v允许
列车信息
第三章
列控系统基本工作原理
n 系统结构
n 控制中心与中继器相连 n 一个中继器最多与128个轨道环路相连
轨道电缆
中继器
...
中继器
...
中继器
控制中心 联锁信息